Механической характеристикой двигателя называется зависимость частоты вращения ротора от момента на валу n = f (M2). Так как при нагрузке момент холостого хода мал, то M2 ≈ M и механическая характеристика представляется зависимостью n = f (M). Если учесть взаимосвязь s = (n1 - n) / n1, то механическую характеристику можно получить, представив ее графическую зависимость в координатах n и М (рис. 1).
Рис. 1. Механическая характеристика асинхронного двигателя
Естественная механическая характеристика асинхронного двигателя соответствует основной (паспортной) схеме его включения и номинальным параметрам питающего напряжения. Искусственные характеристики получаются, если включены какие-либо дополнительные элементы: резисторы , реакторы , конденсаторы . При питании двигателя не номинальным напряжением характеристики также отличаются от естественной механической характеристики.
Механические характеристики являются очень удобным и полезным инструментом при анализе статических и динамических режимов электропривода.
Основные точки механической характеристики: критическое сколь-жение и частота, максимальный момент, пусковой момент, номинальный момент.
Механическая характеристика - это зависимость вращающего момента от скольжения, или, иначе говоря, от числа оборотов:
![]()
Из выражения  видно, что эта зависимость очень сложна, поскольку, как показывают формулы)
видно, что эта зависимость очень сложна, поскольку, как показывают формулы)  и
и  , скольжение входит также в выражения для I
2
и cos ? 2
. Механическая характеристика асинхронного двигателя дается обычно графически
, скольжение входит также в выражения для I
2
и cos ? 2
. Механическая характеристика асинхронного двигателя дается обычно графически
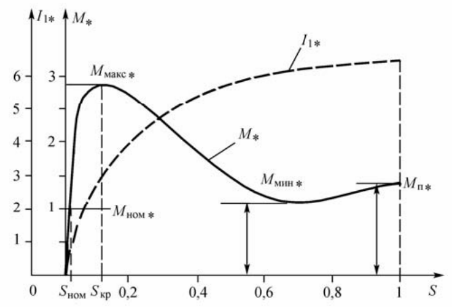
Начальная точка характеристики соответствует n = 0 и s = 1: это первое мгновение пуска двигателя. Величина пускового вращающего момента M n - очень важная характеристика эксплуатационных свойств двигателя. Если M n мал, меньше номинального рабочего момента, двигатель может запускаться только вхолостую или при соответственно сниженной механической нагрузке.
Обозначим символом M np противодействующий (тормозной) момент, создаваемый механической нагрузкой на валу, при которой двигатель пускается. Очевидным условием для возможности запуска двигателя является: M n > M np . Если это условие выполнено, ротор двигателя придет в движение, число оборотов его n будет возрастать, а скольжение s уменьшаться. Как видно из изображения выше, вращающий момент двигателя при этом растет от M n до максимального M m , соответствующего критическому скольжению s kp , следовательно, растет и избыточная располагаемая мощность двигателя, определяемая разностью моментов M и M np .
Чем больше разность между располагаемым моментом двигателя (возможным при данном скольжении по рабочей характеристике) М и противодействующим М np , тем легче режим запуска и тем быстрее двигатель достигает установившейся скорости вращения.
Как показывает механическая характеристика, при некотором числе оборотов (при s = s kp ) располагаемый вращающий момент двигателя достигает максимально возможного для данного двигателя (при данном напряжении U ) значения M т . Далее двигатель продолжает увеличивать скорость вращения, но располагаемый вращающий момент его быстро уменьшается. При каких-то значениях n и s вращающий момент двигателя становится равным противодействующему: пуск двигателя заканчивается, число оборотов его устанавливается на значении, соответствующем соотношению:
![]()
Это соотношение является обязательным для всех нагрузочных режимов двигателя, то есть для всех значений M np , не выходящих за пределы максимального располагаемого вращающего момента двигателя М т . В этих пределах двигатель сам автоматически приспосабливается ко всем колебаниям нагрузки: если во время работы двигателя его механическая нагрузка увеличивается, на какое-то мгновение M np станет больше момента, развиваемого двигателем. Обороты двигателя начнут снижаться, а момент увеличиваться.
Скорость вращения установится на новом уровне, отвечающем равенству M и M np . При снижении нагрузки процесс перехода к новому нагрузочному режиму будет обратным.
Если нагрузочный момент M np превысит М т , двигатель сразу остановится, так как с дальнейшим уменьшением оборотов вращающий момент двигателя уменьшается.
Поэтому максимальный момент двигателя М т называется еще опрокидывающим или критическим моментом.
Если в формулу момента ![]() подставить:
подставить:
то получим:
Взяв первую производную от М по и приравняв ее к нулю, найдем, что максимальное значение вращающего момента наступает при условии:
то есть при таком скольжении s = s kp , при котором активное сопротивление ротора равно индуктивному сопротивлению
![]()
Значения s kp у большинства асинхронных двигателей лежат в пределах 10 - 25%.
Если в написанную выше формулу момента вместо активного сопротивления r 2 подставить индуктивное по формуле
![]()
Максимальный вращающий момент асинхронного двигателя пропорционален квадрату магнитного потока (а значит, и квадрату напряжения) и обратно пропорционален индуктивности рассеяния обмотки ротора.
При постоянстве напряжения, подводимого к двигателю, его поток Ф остается практически неизменным.
Индуктивность рассеяния роторной цепи тоже практически постоянна. Поэтому при изменении активного сопротивления в цепи ротора максимальное значение вращающего момента M т изменяться не будет, но будет наступать при разных скольжениях (с увеличением активного сопротивления ротора - при больших значениях скольжения).
Очевидно, что максимум возможной нагрузки двигателя определяется значением его M т . Рабочая часть характеристики двигателя лежит в узком диапазоне чисел оборотов от n , соответствующего M т , до. При n = n 1 (конечная точка характеристики) М = 0, так как при синхронной скорости ротора s = 0 и I 2 = 0.
Номинальный вращающий момент, определяющий значение паспортной мощности двигателя, принимается обычно равным 0,4 - 0,6 от M т . Таким образом, асинхронные двигатели допускают кратковременные перегрузки в 2 - 2,5 раза.
Основным параметром, характеризующим режим работы асинхронного двигателя, является скольжение s - относительная разность частоты вращения ротора двигателя n и его поля n о: s = (n o - n) / n o .
Область механической характеристики, соответствующая 0 ≤ s ≤ 1 - область двигательных режимов, причем при s < s кр работа двигателя устойчива, при s > s кр - неустойчива. При s < 0 и s > 1 момент двигателя направлен против направления вращения его ротора (соответственно рекуперативное торможение и торможение противовключением).
Устойчивый участок механической характеристики двигателя часто описывается формулой Клосса , подстановкой в которую параметров номинального режима можно определить критическое скольжение s кр:
 ,
,
где: λ = M kp / M н - перегрузочная способность двигателя.
Механическая характеристика по данным справочника или каталога приближенно может быть построена по четырем точкам (рис. 7.1):
Точка 1 - идеальный холостой ход, n = n o = 60 f / p, М = 0, где: р - число пар полюсов магнитного поля двигателя;
Точка 2 - номинальный, режим: n = n н, М = М н = 9550 P н / n н, где P н - номинальная мощность двигателя в кВт;
Точка 3 - критический режим: n = n кр, М = М кр =λ М н;
Точка 4 - режим пуска: n = 0, М = М пуск = β М н.
При анализе работы двигателя в диапазоне нагрузок до М н и несколько больше устойчивый участок механической характеристики можно приближенно описать уравнением прямой линии n = n 0 - вМ, где коэффициент “в” легко определяется подстановкой в уравнение параметров номинального режима n н и М н.
Конструкция обмоток статора. Однослойные и двухслойные петле-вые обмотки.
По конструкции катушек обмотки подразделяют на всыпные с мягкими катушками и обмотки с жесткими катушками или полукатушками. Мягкие катушки изготовляют из круглого изолированного провода. Для придания требуемой формы их предварительно наматывают на шаблоны, а затем укладывают в изолированные трапецеидальные пазы (см. рис. 3.4, в , г и 3.5, в ); междуфазовые изоляционные прокладки устанавливают в процессе укладки обмотки. Затем катушки укрепляют в пазах с помощью клиньев или крышек, придают им окончательную форму (формируют лобовые части), осуществляют бандажирование обмотки и ее пропитку. Весь процесс изготовления всыпных обмоток можно полностью механизировать.
Жесткие катушки (полукатушки) изготовляют из прямоугольного изолированного провода. Окончательную форму им придают до укладки в пазы; одновременно на них накладывают корпусную и междуфазовую изоляцию. Затем катушки укладывают в предварительно изолированные открытые или полуоткрытые пазы , укрепляют и подвергают пропитке.
1. Однослойные обмотки - наиболее пригодны для механизированной укладки, так как в этом случае обмотка должна быть концентрической и укладываться в пазы статора обеими сторонами катушки одновременно. Однако применение их приводит к увеличенному расходу обмоточного провода из-за значительной длины лобовых частей. Кроме того, в таких обмотках не представляется возможным выполнить укорочение шага, что приводит к ухудшению формы магнит-ного поля в воздушном зазоре, увеличению добавочных потерь, возникновению провалов в механической характеристике и повышению шума. Однако из-за своей простоты и дешевизны такие обмотки широко применяют в асинхронных двигателях небольшой мощности до 10-15 кВт.
2. Двухслойные обмотки - позволяют выполнить укорочение шага обмотки на любое количество зубцовых делений, благодаря чему улучшается форма магнитного поля, создаваемого обмоткой, и подавляются высшие гармонические в кривой ЭДС. Кроме того, при двухслойных обмотках получается более простая форма лобовых соединений, что упрощает изготовление обмоток. Такие обмотки применяют для двигателей мощностью свыше 100 кВт с жесткими катушками, которые укладывают вручную.
Обмотки статора. Однослойные и двухслойные волновые обмотки
В пазах сердечника статора раз-мещается многофазная обмотка, которая подсоединяется к сети переменного тока. Многофазные симметричные обмотки с числом фаз т включают в себя т фазных обмоток, которые соединяются в звезду или многоугольник. Так, например, в случае трехфазной обмотки статора число фаз т = 3 и обмотки могут соединяться в звезду или треугольник. Между собой обмотки фаз смещены на угол 360/т град; для трехфазной обмотки этот угол равен 120°.
Обмотки фаз выполняются из отдельных катушек, соединенных последовательно, параллельно либо последовательно-параллельно. В данном случае под катушкой подразумеваются несколько последовательно соединенных витков обмотки статора, размещенных в одних и тех же пазах и имеющих общую изоляцию относительно стенок паза. В свою очередь витком считаются два активных (т. е. расположенных в самом сердечнике статора) проводника, уложенных в двух пазах под соседними разноименными полюсами и соединенных друг с другом последовательно. Проводники, расположенные вне сердечника статора и соединяющие активные проводники между собой, называются лобовыми частями обмотки. Прямолинейные части катушек обмоток, уложенные в пазы, называются сторонами катушек или пазовыми частями.
Пазы статора, в которые укладываются обмотки, образуют на внутренней стороне статора так называемые зубцы. Расстояние между центрами двух соседних зубцов сердечника статора, измеренное по его поверхности, обращенной к воздушному зазору, называется зубцовым делением или пазовым делением.
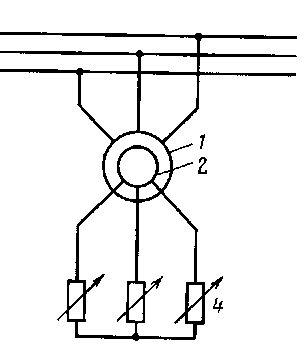
Многослойные цилиндрические катушечные обмотки (рисунок 3) наматываются из круглого провода и состоят из многослойных дисковых катушек, расположенных вдоль стержня. Между катушками (через каждую катушку или через две-три катушки) могут быть оставлены радиальные каналы для охлаждения. Такие обмотки применяются на стороне высшего напряжения при S ст ≤ 335 кВ×А, I ст ≤ 45 А и U л.н ≤ 35 кВ.
Однослойные и двухслойные цилиндрические обмотки (рисунок 4) наматываются из одного или нескольких (до четырех) параллельных прямоугольных проводников и применяются при S ст ≤ 200 кВ×А,I ст ≤ 800 А и U л.н ≤ 6 кВ.
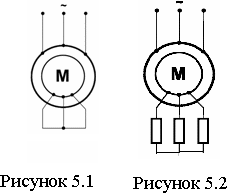
Асинхронный короткозамкнутый электродвигатель (рисунок 5.1) и АД с фазным ротором (рисунок 5.2) широко распространены в электроприводе благодаря большому ресурсу безотказной работы, высоким показателям в работе, хорошим регулировочным свойствам.
На рисунке 5.3 представлена схема замещения одной фазы электродвигателя с учетом параметров намагничивающего контура с активным r m и индуктивным x m сопротивлениями.
В схеме замещения:
r 1 - активное сопротивление фазы статорной обмотки;
r 2 ′ - приведенное к статору активное сопротивление фазы роторной обмотки;
x 1 - индуктивное сопротивление фазы статорной обмотки;
x 2 ′ - приведенное к статору индуктивное сопротивление фазы роторной обмотки;
x m - индуктивное сопротивление контура намагничивания.
В соответствии со схемой замещения, роторный ток I 2 ’ имеет значение
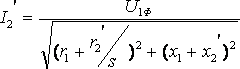
Из (5.1) следует, что роторный ток I 2 ’ зависит от скольжения s , т.е. от частоты вращения ротора машины, поскольку
Заметим, что при пуске скольжение s = 1 (текущее значение частоты вращения w = 0) , а при частоте вращения w=w 0 идеального холостого хода скольжение равно s = 0 . Из соотношения следует также, что при пуске роторный ток достигает максимального значения I 2к ’ @ (8¸10)I ном , и его следует ограничивать.
Частота тока ротора f p при значении частоты f c сетевого напряжения f p = f c ×s, следовательно, при пуске s=1 и асинхронная машина может быть представлена трансформатором напряжения, поскольку f p =f c =50Гц . По мере разгона двигателя и его работе с номинальным скольжением s н , которое не превышает s н 0,1 ; падает и частота роторного тока f p = 1..5Гц.
Мощность Р 1 , потребляемая АД из сети, расходуется на покрытие потерь в контуре намагничивания ∆Р m и в обмотке статора ∆Р 1 , остаток ее преобразуется в электромагнитную мощность Р Э , которая равна
![]()
В свою очередь, , и, решая совместно и находим значение электромагнитного момента
 .
.
Зависимость (5.4) является описанием механической характеристики АД и представляет сложную зависимость момента АД от скольжения. Исследуем ее на экстремум, взяв производную и приравняв ее нулю:
Зависимость имеет максимум при критическом значении скольжения, равном
и критическом (максимальном) моменте
Заметим, знак (+) относится к двигательному режиму, а знак (-) к генераторному режиму машины.
Для практических расчетов, удобнее использовать формулу Клосса, полученную из выражений
 ,
где .
,
где .
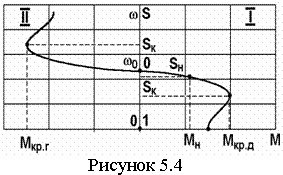
В крупных асинхронных машинах r 1 << r 2 ’ , и ε ≈0. Механическая характеристика АД имеет вид, изображенный на рисунке 2.4. Характерные точки характеристики:
1- s=0; М=0 , при этом скорость двигателя равна синхронной;
2- s=s ном , М=М ном - номинальный
режим работы двигателя;
3- s = s к , М = М кр.Д - максимальный момент в двигательном режиме;
4- s = 1, М = М п - начальный пусковой момент;
5- s = -s к , М = М кр.Г - максимальный момент в генераторном режиме.
Анализируя влияние напряжения питания U на механические характеристики электродвигателя, имеем на основании соотношений (5.6) и (5.7), что критическое скольжениеs к остается постоянным при понижении напряжения, а критический момент M кр.д уменьшается пропорционально квадрату питающего напряжения (рисунок 5.5).
При
понижении сетевого напряжения до
значения 0,9×U
ном
,
т.е. на 10% от U
ном
,
критический момент M
кр.д
уменьшается
на 19%. При снижении питающего напряжения
для развития прежнего значения момента
двигатель должен работать с большими
роторными токами.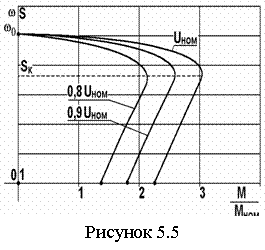
При проектировании электродвигателя следует убедиться, что значение пускового (s = 1 ) и критического моментов (s = s к ) при минимально возможном напряжении удовлетворяют требованиям рабочей машины.
Анализируя влияние
активного сопротивления
,
вводимого в роторную цепь, на основании
соотношений (5.5)-(5.6), что с увеличением
роторного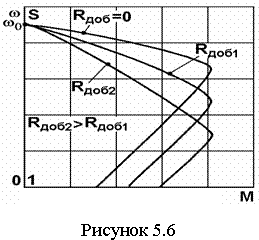
сопротивления, которое становится равным (r 2 ’ + R доб ), увеличивается критическое скольжение S к , но величина критического момента двигателя M кр.д остается без изменения.
Механические характеристики приведены на рисунке 12. Метод используется для запуска машины, когда на время пуска в роторную цепь включается значительное по величине R доб . Диаграмма запуска аналогична диаграмме запуска двигателя постоянного тока независимого возбуждения. Для расчета искусственных механических характеристик при введении сопротивления R доб в роторную цепь используется соотношение
![]()
где s и и s e – скольжения соответственно на искусственной и естественной характеристиках.
Зная величину R доб , вводимого в роторную цепь, для тех же значений момента по соотношению (5.8) производится расчет скольжений s и на искусственной характеристике.
Введение
активно – индуктивных сопротивлений
в роторную цепь машины (рисунок 14)
используется для поддержания большего
постоянства пускового момента машины
по сравнению с естественной характеристикой
машины – механическая характеристика
машины в области скольжений 1
Критический
момент машины M
кр.д
и
критическое скольжение s
к
машины
изменяются в соответствии с соотношениями.
Введение активных и индуктивных
сопротивлений в статорную цепь машины
(рисунок) используется для уменьшения
броска пускового тока машины, поскольку
напряжение непосредственно на зажимах
статора становится функцией тока и по
мере уменьшения пускового тока (разгон)
указанное напряжение растет и
восстанавливается до значения, близкого
к U
ном
.
Вывод
активных и индуктивных сопротивлений
из статорной цепи машины осуществляется
релейно - контакторной или бесконтактной
схемой.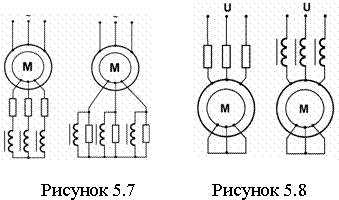
Асинхронные двигатели (АД) – самый распространенный вид двигателей, т.к. они более просты и надежны в эксплуатации, при равной мощности имеют меньшую массу, габариты и стоимость в сравнении с ДПТ. Схемы включения АД приведены на рис. 2.14.
До недавнего времени АД с короткозамкнутым ротором применялись в нерегулируемых электроприводах. Однако с появлением тиристорных преобразователей частоты (ТПЧ) напряжения, питающего статорные обмотки АД, двигатели с короткозамкнутым ротором начали использоваться в регулируемых электроприводах. В настоящее время в преобразователях частоты применяются силовые транзисторы и программируемые контроллеры. Способ регулирования скорости получил название импульсного и его совершенствование является важнейшим направлением в развитии электропривода.
Рис. 2.14. а) схема включения АД с короткозамкнутым ротором;
б) схема включения АД с фазным ротором.
Уравнение для механической характеристики АД может быть получено на основании схемы замещения АД. Если в этой схеме пренебречь активным сопротивлением статора, то выражение для механической характеристики будет иметь вид:
![]() ,
,
Здесь М к – критический момент; S к - соответствующее ему критическое скольжение; U ф – действующее значение фазного напряжения сети; ω 0 =2πf/p – угловая скорость вращающегося магнитного поля АД (синхронная скорость); f – частота питающего напряжения; p – число пар полюсов АД; х к – индуктивное фазное сопротивление короткого замыкания (определяется из схемы замещения); S=(ω 0 -ω)/ω 0 – скольжение (скорость ротора относительно скорости вращающегося поля); R 2 1 – суммарное активное сопротивление фазы ротора.
Механическая характеристика АД с короткозамкнутым ротором приведена на рис. 2.15.
Рис. 2.15. Механическая характеристика АД с короткозамкнутым ротором.
На ней можно выделить три характерные точки. Координаты первой точки (S=0; ω=ω 0 ; М=0 ). Она соответствует режиму идеального холостого хода, когда скорость ротора равна скорости вращающегося магнитного поля. Координаты второй точки (S=S к; М=М к ). Двигатель работает с максимальным моментом. При М с >М к ротор двигателя будет принудительно остановлен, что для двигателя является режимом короткого замыкания. Поэтому вращающий момент двигателя в этой точке и называется критическим М к . Координаты третьей точки (S=1; ω=0; М=М п ). В этой точке двигатель работает в режиме пуска: скорость ротора ω=0 и на неподвижный ротор действует пусковой момент М п . Участок механической характеристики, расположенный между первой и второй характерными точками, называется рабочим участком. На нем двигатель работает в установившемся режиме. У АД с короткозамкнутым ротором при выполнении условий U=U н и f=f н механическая характеристика называется естественной. В этом случае на рабочем участке характеристики расположена точка, соответствующая номинальному режиму работы двигателя и имеющая координаты (S н; ω н; М н ).
Электромеханическая характеристика АД ω=f(I ф) , которая на рис.2.15 изображена штриховой линией, в отличие от электромеханической характеристики ДПТ, совпадает с механической характеристикой только на ее рабочем участке. Это объясняется тем, во время пуска из-за изменяющейся частоты э.д.с. в обмотке ротора Е 2 изменяется частота тока и соотношение индуктивного и активного сопротивлений обмотки: в начале пуска частота тока большая и индуктивное сопротивление больше активного; с увеличением скорости вращения ротора ω частота тока ротора, а значит и индуктивное сопротивление его обмотки, уменьшается. Поэтому пусковой ток АД в режиме прямого пуска в 5÷7 раз превышает номинальное значение I фн , а пусковой момент М п равен номинальному М н . В отличии от ДПТ, где при пуске необходимо ограничивать пусковой ток и пусковой момент, при пуске АД пусковой ток необходимо ограничивать, а пусковой момент увеличивать. Последнее обстоятельство наиболее важно, поскольку ДПТ с независимым возбуждением запускается при М с <2,5М н , ДПТ с последовательным возбуждением при М с <5М н , а АД при работе на естественной характеристике при М с <М н .
У АД с короткозамкнутым ротором увеличение М п обеспечивается специальной конструкцией обмотки ротора. Паз для обмотки ротора делают глубоким, а саму обмотку располагают в два слоя. При пуске двигателя частота Е 2 и токи ротора большие, что приводит к появлению эффекта вытеснения тока – ток протекает только в верхнем слое обмотки. Поэтому увеличивается сопротивление обмотки и пусковой момент двигателя М П . Его величина может достигать 1,5М н .
У АД с фазным ротором увеличение М П обеспечивается за счет изменения его механической характеристики. Если сопротивление R П , включенное в цепь протекания тока ротора, равно нулю – двигатель работает на естественной характеристике и М П =М Н . При R П >0 увеличивается суммарное активное сопротивление фазы ротора R 2 1 . Критическое же скольжение S к по мере увеличения R 2 1 тоже увеличивается. Вследствие этого у АД с фазным ротором введение R П в цепь протекания тока ротора приводит к смещению М К в сторону больших скольжений. При S К =1 М П =М К. Механические характеристики АД с фазным ротором при R П >0 называются искусственными или реостатными. Они приведены на рис. 2.16.
Рис. 2.16. Механические характеристики АД с фазным ротором.
Асинхронный двигатель с короткозамкнутым ротором запустится при М п >М с и будет работать в точке А (см. рис. 2.15). После этого момент сопротивления М с можно увеличивать до М К . АД, как и двигатели постоянного тока, при увеличении М с будет автоматически, без вмешательства извне, снижать скорость ω и увеличивать вращающий момент М до тех пор, пока М и М с не сравняются по величине, т.е. из установившегося режима с большей скоростью переходить в установившийся режим с меньшей скоростью. При уменьшении М с будет наблюдаться обратное – двигатель из установившегося режима с меньшей скоростью будет автоматически переходить в установившийся режим с большей скоростью. Рабочий участок механической характеристики АД аналогичен механической характеристике ДПТ с независимым возбуждением – прямая линия, наклоненная к оси абсцисс.
Такими свойствами АД обладает благодаря э.д.с. Е 2 , которая наводится вращающимся магнитным полем статора в обмотке ротора. При М с >М динамический момент М д <0 и скорость ротора ω уменьшается. Магнитное поле статора, вращающееся с постоянной скоростью ω 0 (синхронной скоростью) будет пересекать обмотку ротора с большой частотой. Поэтому будет увеличиваться Е 2 , ток в обмотке ротора, сила Ампера, действующая на ее витки, а значит и вращающий момент М .
Перегрузочная способность АД по моменту определяется отношением критического момента М К к моменту номинальному М Н . Для обычных АД с короткозамкнутым ротором М К /М Н =1,7 , с фазным ротором М К /М Н =1,8 . Для специальных крановых АД с короткозамкнутым ротором типа МТК и фазным ротором типа МТКФ отношение М К /М Н =2,3÷3,4 .
В результате взаимодействия магнитного поля с токами в роторе асинхронного двигателя создается вращающий электромагнитный момент, стремящийся уравнять скорость вращения магнитного поля статора и ротора.
Разность скоростей вращения магнитного поля статора и ротора асинхронного двигателя характеризуется величиной скольжения s = (n1 - n2 ) / n2, где n1 - синхронная скорость вращения поля, об/мин, n2 - скорость вращения ротора асинхронного двигателя, об/мин. При работе с номинальной нагрузкой скольжение обычно мало, так для электродвигателя, например, с n1 = 1500 об/мин, n2 = 1 460 об/мин, скольжение равно:s = ((1500 - 1460) / 1500) х 100 = 2,7%
Не может достичь даже три отсоединенном механизме, так как при ней проводники ротора не будут пересекаться магнитным полем, в них не будет наводиться ЭДС и не будет тока. Асинхронный момент при s = 0 будет равен нулю.
В начальный момент пуска в обмотках ротора протекает ток с частотой сети. По мере ускорения ротора частота тока в нем будет определяться скольжением асинхронного двигателя : f2 = s х f1, где f1 - частота тока, подводимого к статору.
Сопротивление ротора зависит от частоты тока в нем, причем чем больше частота, тем больше его индуктивное сопротивление. С увеличением индуктивного сопротивления ротора увеличивается сдвиг фаз между напряжением и током в обмотках статора.
При пуске асинхронных двигателей коэффициент мощности поэтому значительно ниже, чем при нормальной работе. Величина тока определяется эквивалентным значением сопротивления электродвигателя и приложенным напряжением.
Величина эквивалентного сопротивления асинхронного двигателя с изменением скольжения изменяется по сложному закону. При уменьшении скольжения в пределах 1 - 0,15 сопротивление увеличивается, как правило, не более чем в 1,5 раза, в пределах от 0,15 до sн ом в 5-7 раз по отношению к начальному значению при пуске.
Ток по величине изменяется обратно пропорционально изменению эквивалентного сопротивления Таким образом, при пуске до скольжения порядка 0,15 ток опадает незначительно, а в дальнейшем быстро уменьшается.
Момент вращения электродвигателя
определяется величиной магнитного потока, током и угловым сдвигом между ЭДС
и током в роторе. Каждая
из этих величин в свою очередь зависит от скольжения, поэтому для исследования рабочих характеристик асинхронных двигателей устанавливается зависимость момента от скольжения и влияния на него подводимого напряжения и частоты.
Момент вращения может быть также определен по электромагнитной мощности на валу как отношение этой мощности к угловой скорости ротора. Величина момента пропорциональна квадрату напряжения и обратно пропорциональная квадрату частоты.
Характерными значениями момента в зависимости от скольжения (или скорости) являются начальное значение момента (когда электродвигатель еще неподвижен), максимальное значение момента (и соответствующее ему сколь жение, называемое критическим) и минимальное значение момента в пределе скоростей от неподвижного состояния до номинальной .
З начения момента для номинального напряжения приводятся в каталогах для электрических машин. Знание минимального момента необходимо при расчете допустимости пуска или самозапуска механизма с полной нагрузкой механизма. Поэтому его значение для конкретных расчетов должно быть либо определено, либо получено от завода-поставщика.
Величина максимального значения момента определяется индуктивным сопротивлением рассеяния статора и ротора и не зависит от величины сопротивления ротора.
Критическое скольжение
определяется отношением сопротивления ротора к эквивалентному сопротивлению (обусловлено активным сопротивлением статора и индуктивным сопротивлением рассеяния статора и ротора).
Увеличение только активного сопротивления ротора сопровождается увеличением критического скольжения и перемещением максимума момента в область более высоких скольжений (меньшей скорости вращения). Таким путем может быть достигнуто изменение характеристик моментов.
Изменение скольжения возможно увеличением сопротивления цени ротора или потока. Первый вариант осуществим только для асинхронных двигателей с фазным ротором (от S= 1 до S=Sном)
, но не экономичен. Второй вариант осуществим при изменении питающего напряжения, но только в сторону уменьшения. Диапазон регулирования мал, так как S возрастает, но одновременно уменьшается перегрузочная способность асинхронного двигателя. По экономичности оба варианта, примерно, равноценны.
В изменение момента при различных скольжениях осуществляется с помощью сопротивления, вводимого в цепь обмотки ротора. В асинхронных двигателях с короткозамкнутым ротором изменение момента может быть достигнуто за счет применения двигателей с переменными параметрами или с помощью .
Правильный выбор электродвигателя для производственного механизма – залог его нормальной и экономичной работы. Если электродвигатель подобран правильно, это упростит систему управления электроприводом и возможно удешевит стоимость электропривода. Как известно электропривод должен обеспечивать не только постоянство установившихся значений (скорость, момент), но и динамических (переходных процессов, таких как ускорение, тормозной момент, пусковой момент и т.д.).
Основным критерием для подбора электродвигателей используют зависимость, на которой отображают значение момента М электродвигателя и скорости вращения вала n при действии этого момента. Такая зависимость имеет название механическая характеристика n=f(M). По механическим характеристикам производят анализ электромеханических свойств двигателя, а также оценивают целесообразность применения его для различного рода механизмов и устройств. Они могут быть двух видов: естественные и искусственные.
Естественные механические характеристики: они снимаются при влиянии на двигатель номинальных параметров (номинальный ток, сопротивление обмоток, напряжение, момент сопротивления и т.д.). То есть двигатель подключается к источнику питания без каких-либо преобразовательных устройств – прямым включением.
Искусственные механические характеристики: их снимают при введении в цепь двигателя дополнительных элементов (резистор добавочный) или при пониженном напряжении питания, частоте (если двигатель переменного напряжения) и т.д. То есть на механическую характеристику двигателя производят искусственное влияние.
Также различают механические характеристики по изменению скорости вращения вала в зависимости от увеличения момента. Они оцениваются по жесткости:
и крутизне наклона:
Чтоб определить жесткость механической характеристики необходимо знать изменение скорости и момента на заданном участке зависимости n=f(M). Соответственно все расчеты жесткости ведутся либо в процентах, либо в относительных единицах.
Также механические характеристики можно отсортировать по группам:
- Жесткая – когда скорость уменьшается немного при увеличении момента нагрузки. Как пример, двигатели постоянного тока независимого возбуждения ДПТ НВ или линейная часть характеристики асинхронного двигателя.
- Мягкая – при увеличении момента нагрузки изменения в скорости вращения довольно существенные. К таким относят двигатели постоянного тока последовательного возбуждения ДПТ ПВ.
Ниже приведен график различных механических характеристик электродвигателей:
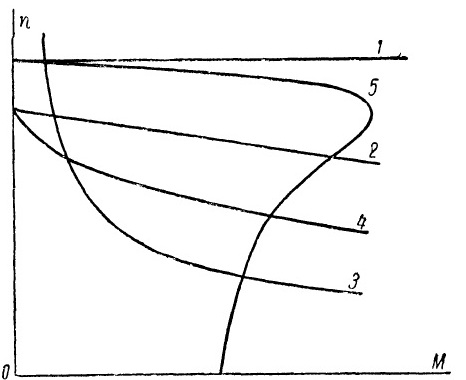
- – это абсолютно жесткая синхронной машины
- – жесткая ДПТ НВ
- — мягкая ДПТ ПВ
- – мягкая ДПТ смешанного возбуждения
- – асинхронного двигателя
Подбор электродвигателя определяется требованиями производственных механизмов. В таком производстве как прокатка металла, изготовление бумаги или картона, требуется четкое поддержание постоянства скорости, а такие механизмы, как подъемные и транспортные, не требуют жестких характеристик (в тяговых электроприводах используется ДПТ ПВ, также он применяется в некоторых крановых механизмах).