Elektrinių pavarų sukimosi dažnio reguliavimas yra vienas iš svarbiausių šiuolaikinės elektrotechnikos uždavinių. Sukūrus ir taikant racionalius reguliavimo metodus, galima padidinti mechanizmų našumą, pagerinti gaminių kokybę, supaprastinti mechaninę pavaros dalį, sumažinti energijos sąnaudas ir kt.
Generatoriaus išėjimo dažnis yra vienas iš svarbių parametrų, lemiančių generatoriaus reitingą. Generatoriaus elektros išėjimas turi būti palaikomas fiksuotu 50 Hz arba 60 Hz dažniu, kad atitiktų standarto išėjimo signalą. elektros tinklas arba jūsų instrumentų dažnio atsaką. Taip pat galite susidurti su skirtingomis izoliuotomis to paties tinklo sritimis, veikiančiomis skirtingais dažniais. Tada tampa būtina keisti generatoriaus išėjimo dažnį, atsižvelgiant į naudojamų prietaisų galią arba tinklą, prie kurio prijungtas jūsų generatorius.
Su greičio reguliavimu negalima painioti natūralaus elektros variklio greičio pokyčio pagal jo mechanines charakteristikas, kai keičiasi pavaros veleno apkrova. Reguliavimas – tai priverstinis elektrinės pavaros sukimosi greičio keitimas, priklausomai nuo pavaros mechanizmo reikalavimų.
Variklio sūkių keitimas į išėjimo dažnį. Šiuolaikinius generatorius sudaro variklis, tiesiogiai prijungtas prie generatoriaus. kintamoji srovė elektros gamybai. Vienas iš labiausiai paplitusių būdų pakeisti generatoriaus išėjimo dažnį yra variklio sūkių keitimas.
Abu veiksniai yra susieti pagal šią formulę. Jei naudojate mažus arba gyvenamuosius generatorius, galite pakeisti variklio sūkių skaičių, atlikdami keletą pakeitimų įrenginio valdymo skydelyje. Norėdami pakeisti osciliatoriaus dažnį nuo 60 Hz iki 50 Hz, atlikite toliau nurodytus veiksmus.
Bet kuriam reguliavimo metodui būdingi šie pagrindiniai rodikliai:
reguliavimo diapazonas – maksimalaus ir mažiausio greičio santykis, kurį galima gauti pavaroje t.y. ;
reguliavimo sklandumas – stabilių greičių, gautų tam tikrame reguliavimo diapazone, skaičius;
efektyvumas - atsižvelgiant į išlaidas, susijusias su paties valdymo metodo sukūrimu, ir papildomus energijos nuostolius, atsirandančius pavaroje;
Generatoriaus valdikliai stebi ir valdo realiu laiku. Integruotos apsaugos funkcijos automatiškai išjungs jūsų generatorių, jei variklis sukasi per didelius sūkius arba labai žemas išėjimo dažnis. Kitas straipsnis: Kaip veikia generatoriai. Dažnio keitikliai Jei naudojate fiksuoto greičio generatorių, prie įrenginio galite prijungti dažnio keitiklį. Dažnio keitiklis yra lygintuvo ir keitiklio derinys. Sukurti lygintuvas naudoja generatorių nuolatinė srovė.
pavaros stabilumas - sukimosi greičio pokytis pasikeitus variklio veleno sukimo momentui. Darbo stabilumą visiškai lemia mechaninių charakteristikų standumas;
reguliavimo kryptis rodo, kad greitis keičiasi tik žemyn arba tik į viršų nuo pagrindinio pavaros greičio, arba galimas ir aukštyn, ir žemyn.
Bet koks susijęs įtampos pokytis yra susijęs su įrenginio paskirtimi ir taip pat priklauso nuo programos, kuriai naudojamas dažnio keitiklis. Tradiciškai dažnio keitikliai, tokie kaip sukamieji keitikliai ir variklių generatorių komplektai, buvo gaminami iš elektromechaninių komponentų. Atsiradus kietojo kūno elektronikai, dabar jie gaminami kaip visiškai elektroniniai įrenginiai.
Ekonominis inverterio poveikio pagrindimas
Dažnio keitikliai taip pat naudojami aviacijos ir kosmoso pramonėje 50 Hz arba 60 Hz dažniui konvertuoti į 400 Hz išvestį, naudojamą antžeminėje aplinkoje. energijos vienetas lėktuvas. Šios sistemos taip pat naudojamos valdyti ventiliatorių ir siurblių greitį bei kitas kintamo sukimo momento apkrovas, veikiančias kintamu greičiu.
Asinchroninio variklio rotoriaus greitis nustatomas pagal formulę:
čia f – kintamosios srovės dažnis; p – statoriaus apvijų polių porų skaičius; s - slydimas.
Iš aukščiau pateiktos formulės galime daryti išvadą, kad sukimosi greitis indukcinis variklis galima reguliuoti keičiant vieną iš trijų reikšmių:
Kintamo greičio elektroniniai generatoriai Yra speciali osciliatorių klasė, žinoma kaip kintamo greičio elektroniniai keitikliai, kuriuose keičiant variklio greitį keičiasi generatoriaus greitis, kad būtų automatiškai sukurta kintamo dažnio išvestis. Tada dažnio keitiklis naudojamas generatoriaus išėjimui pakoreguoti, kad jis atitiktų pageidaujamą 50 Hz arba 60 Hz išėjimo dažnį. Naudojant šį įrenginį nebereikia kintamo greičio pavaros ir transformatoriaus.
paslysta;
Statoriaus magnetinio srauto polių porų skaičius p;
Statoriaus srovės dažniai f.
Panagrinėkime galimybę reguliuoti rotoriaus greitį keičiant slydimą. Slydimas yra daugelio variklio parametrų funkcija:
s = f(R1, X1; R2; X2; U),
kur R 1 X 1 - statoriaus grandinės aktyvioji ir indukcinė varža; R 2 , X 2 - tas pats, rotorius;
Šios technologijos trūkumas yra tas, kad elektroninis komponentas yra ne tik brangus, bet ir netinkamas naudoti grubioje aplinkoje, kurioje paprastai veikia generatorius. Svarbu pažymėti, kad jie skiriasi nuo kintamo greičio generatorių, kurie turi nuolat kintamą transmisiją, kuri leidžia keisti variklio sūkius, bet palaiko pastovus greitis generatorius. Tai nekeičia išėjimo dažnio, bet leidžia generatoriui pakeisti generatoriaus išėjimą, kad jis atitiktų kintamos apkrovos reikalavimus.
Toliau pateiktame paveikslėlyje parodytas lygiavertis asinchroninio variklio bloko grandinės modelis. Tai reiškia, kad paleidimo metu slydimas yra lygus vienetui, o at sinchroninis darbas su galios dažniu - nulis. Šį bloką galite parametruoti pagal ankstesnės lygiavertės grandinės parametrus arba pagal variklio nominalus, kuriuos blokas naudoja šiems parametrams gauti.
U - variklio maitinimo įtampa.
Iš formulės matyti, kad norint pakeisti slydimą s, į statoriaus arba rotoriaus apvijų grandines galima įvesti papildomus rezistorius arba induktyvumus arba sumažinti variklio maitinimo įtampą.
Įtampos keitimas.
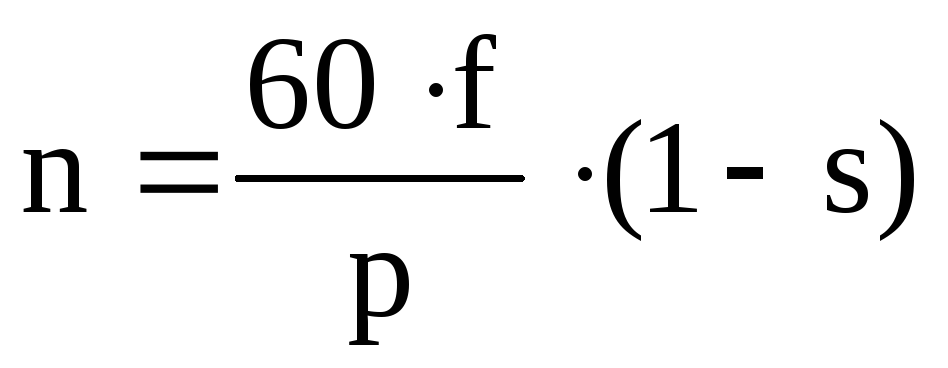
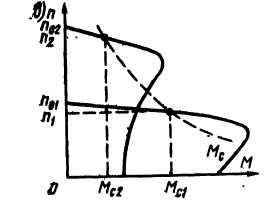
Yra žinoma, kad asinchroninio variklio didžiausias sukimo momentas yra proporcingas tinklo įtampos kvadratui, o mechaninės charakteristikos esant įvairioms įtampoms yra tokios, kaip parodyta 5.8 pav., a. Šių charakteristikų analizė kartu su kėlimo įrenginio pasipriešinimo momento Ms.g charakteristika rodo, kad greičio reguliavimas galimas labai siaurame diapazone. Esant 0,6 U n įtampai, variklis neužsives, nes Mp<Мс.г, а при снижении напряжения ниже 0,6 UB работающий двигатель остановится.
Blokas turi du papildomus terminius prievadus, po vieną kiekvienai apvijai, paslėptus pagal numatytuosius nustatymus. Atliekant šį veiksmą bloko piktogramoje rodomi šiluminiai prievadai ir bloko dialogo lange pridedami skirtukai nuo temperatūros ir terminio prievado. Šie skirtukai aprašyti vėliau šiame pagalbos puslapyje.
Pagrindinės prielaidos ir apribojimai
Naudokite terminius prievadus, kad imituotumėte vario varžos nuostolių poveikį, kuris elektros energiją paverčia šiluma. Šiluminių efektų modeliavimas rotacinėse ir transliacinėse pavarose. Modelis pagrįstas šiomis prielaidomis. Blokas nemodeliuoja vienfazio indukcinio variklio paleidimo mechanizmo. . Pasirinkite vieną iš šių blokų parametravimo metodų.
Variklį, kuris suka mechanizmą, šiek tiek geriau valdyti ventiliatoriaus pasipriešinimo momentu Ms.v - valdymo diapazonas plečiasi.
Keičiant parametrus R 1 , X 1 , X 2 .
Šių parametrų padidėjimas turi beveik tokį patį poveikį variklio mechaninėms charakteristikoms, kaip ir įtampos sumažėjimas, o padidinus varžą R 1 taip pat padidėja energijos nuostoliai statoriaus grandinėje.
Kaip prijungti dažnio keitiklį
Pagal lygiaverčius grandinės parametrus – nurodykite variklio ekvivalentinės grandinės elektrinius parametrus. Pagal variklio įvertinimą. . Statoriaus apvijos varža. Ši parinktis matoma tik tada, kai pasirenkate lygiavertes modelio parametrų nustatymo grandinės parinktis.
Kaip pakeisti variklio greitį?
Rotoriaus varža nurodyta statoriaus atžvilgiu. Statoriaus apvijos induktyvumas. Rotoriaus induktyvumas statoriaus atžvilgiu. Statoriaus įmagnetinimo induktyvumas. Jo vertę sunku įvertinti pagal variklio parametrus, tačiau efektas dažniausiai būna nedidelis. Mechaninė galia, kurią variklis suteikia vardiniu greičiu. Ši parinktis matoma, tik jei parinktis Model Parameterization pasirinktas Variklis.
5.8 pav. Mechaninės asinchroninio variklio charakteristikos keičiant
rotoriaus grandinės įtampa ir varža
50-ųjų pabaigoje vadinamoji droselio elektrinė pavara įgijo tam tikrą pasiskirstymą, kai varža X 1 buvo padidinta įtraukus magnetinį stiprintuvą (sotinimo induktorių) į statoriaus grandinę. Pagrindinis tokių elektrinių pavarų trūkumas (taip pat ir kai kinta įtampa U) yra tai, kad slydimo galia visiškai paverčiama šiluma rotoriuje, padidinant variklio perkaitimą. Droselio pavarose taip pat sumažėja galios koeficientas cosf.
Greitis, kuriuo variklis tiekia tam tikrą mechaninę galią. Linijos įtampa, kuriai esant nurodytos variklio vardinės vertės. Numatytoji reikšmė yra 60 hercų. Linijos srovė, kuria variklis tiekia nurodytą mechaninę galią.
Dažnio keitiklio atsipirkimas
Nuo variklio efektyvumo. . Variklio įvesties galios procentinė dalis, kuri perduodama mechaninei apkrovai, kai jis veikia vardiniu greičiu. Kampo, kuriuo maitinimo srovė atsilieka nuo maitinimo įtampos, kai veikia vardine mechanine galia, kosinusas.
Iš to, kas išdėstyta, išplaukia, kad parametrų R 1 X 1 X 2 padidėjimas arba U sumažėjimas ne tik dėl greičio valdymo, bet ir dėl kai kurių kitų priežasčių (pavyzdžiui, tinklo parametrų įtakos). labai nepageidautina asinchroniniam varikliui.
Rotoriaus grandinės aktyviosios varžos pasikeitimas.
Vienintelis asinchroninio variklio parametras, nuo kurio nepriklauso didžiausias variklio sukimo momentas, yra varža R 2. . Vadinasi, įvedus papildomus rezistorius į rotoriaus grandinę, išsaugoma mechaninė variklio perkrova ir, kas yra labai svarbu, energijos nuostoliai išsiskiria daugiausia rezistorių, ty variklio išorėje.
Kaip prižiūrėti dažnio keitiklius?
Išmatuota statoriaus varža. Bendras variklio polių porų skaičius. Pasirinkite iš toliau pateiktų variklio konfigūracijų. Žvaigždės konfigūracija – variklio statoriaus apvijas prijunkite žvaigždute. . Įtampa tarp linijų, kurias tiekia variklis.
Rotoriaus greitis modeliavimo pradžioje. Atsparumo temperatūros koeficientai. 1x2 linijos vektorius, apibrėžiantis koeficientą α lygtyje, susijusioje su atsparumu temperatūrai, kaip aprašyta šiluminiame pavaros blokų modelyje. Pirmasis elementas atitinka statorių, o antrasis - rotorių.
Šis metodas taikomas tik varikliams su faziniu rotoriumi ir žiedais. Voverės narvelio rotoriaus varžos pakeisti beveik neįmanoma. Įvairių rotoriaus varžų mechaninės charakteristikos parodytos 5.8 pav., b.
Trumpai tariant, reguliavimo procesas yra toks: M=Ms, n=const;  -
- -
- -
- -
- -
- -
- -
- .Įrašas paaiškinamas (2-6) formulėmis.
.Įrašas paaiškinamas (2-6) formulėmis.
Temperatūra, kuriai nustatyti variklio parametrai. Šis skirtukas rodomas tik blokams su atvirais terminiais prievadais. Skyriuje Šiluminiai prievadai. 1 x 2 linijų vektorius, apibrėžiantis statoriaus ir rotoriaus apvijų šiluminę masę. Šiluminė masė – tai energija, reikalinga temperatūrai pakelti vienu laipsniu.
1x2 linijų vektorius, nurodantis statoriaus ir rotoriaus šiluminių prievadų temperatūrą modeliavimo pradžioje. Blokas turi šiuos prievadus. Mechaninis sukimosi anga. Turbinos vaidmuo – vandens, garo ar vėjo energiją paversti mechanine energija, kuri privers generatorių suktis. Generatorius mechaninę energiją paverčia elektra. Hidroelektrinėse toks generatoriaus ir turbinos derinys vadinamas generatorių agregatu.
Reguliavimo diapazono, lygumo, efektyvumo požiūriu šis metodas panašus į nuolatinės srovės variklio greičio reguliavimą keičiant armatūros grandinės varžą. Jis naudojamas Andidžano ir Povenetso laivų vėjo ir špagato elektrinėse pavarose.
Polių porų skaičiaus pokytis.
Asinchroniniai varikliai, kuriuose trifazė statoriaus apvija gali sukurti besisukantį magnetinį lauką su skirtingu polių porų skaičiumi,
Judantis vanduo priverčia turbiną suktis
Šiame generatoriaus bloke vanduo prasiskverbia pro sklendę ir patenka į ritinį. Jis pasuka turbinos mentes ir traukia link turbinos veleno, kad išeitų per apatinę trauklę. Mechaninė energija, kurią sukuria didžiulė jėga, stumianti vandenį į turbiną, perduodama generatoriui, kuris vėliau ją paverčia elektros energija.
Turbina varomas generatorius gamina kintamąją srovę
Generatorius prijungtas prie turbinos pavaros veleno. Jis turi judančią dalį – rotorių ir fiksuotą dalį – statorių. Išorinis rotoriaus paviršius padengtas elektromagnetais. Statoriaus arba cilindro sienelės vidinį paviršių sudaro varinės apvijos. Rotoriui sukantis statoriaus viduje, elektronai varinėse apvijose „vibruoja“. Jų judėjimas sukuria elektros srovę, panašią į tą, kurią sukuria elektromagnetinė indukcijos, bet daug didesnio masto.
5.9 pav. Diagrama, paaiškinanti poliaus komutavimo gavimo principą
vadinami perjungiamais poliais. Sukurtos trifazės apvijos, kurias galima perjungti į skirtingą polių porų skaičių santykiu: 2:1, 5:2, 7:3, 3:1 ir kt.
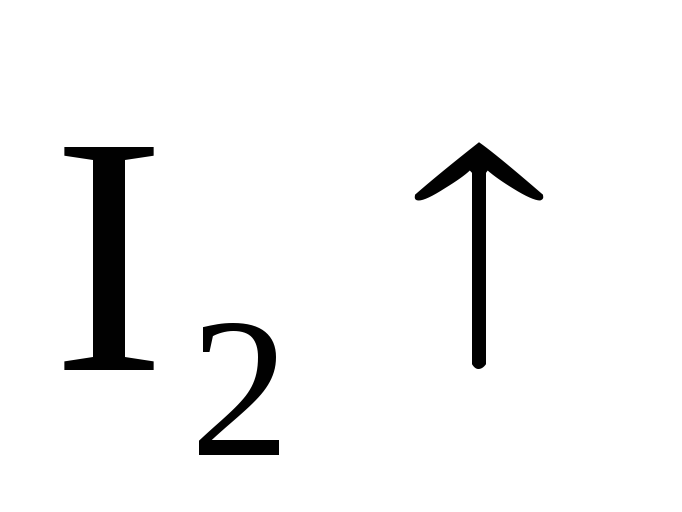
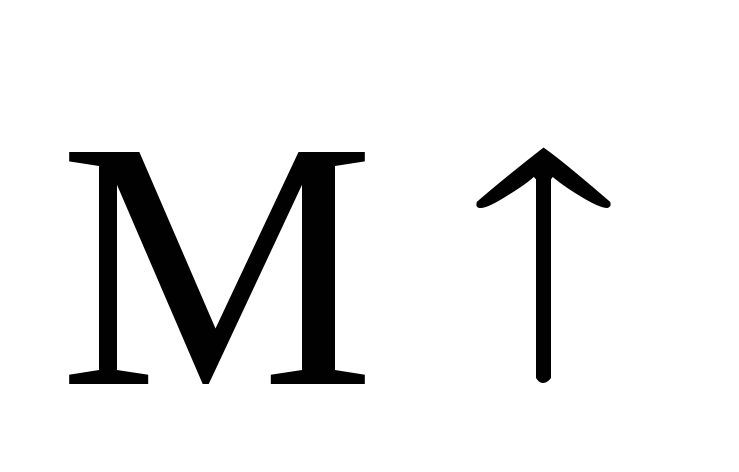
Paaiškinkime polių komutuojamosios apvijos sukūrimo principą naudodamiesi vienfazės apvijos, išdėstytos aštuoniuose grioveliuose, pavyzdžiu. Apvija susideda iš dviejų pusapvijų. Jei pusapvijos sujungtos nuosekliai, tai yra, trumpiklis bus tarp gnybtų K 1 ir H 2 (5.9 pav., a), tada tokia apvija sukurs keturias polių poras (p = 4). Apvijos sukurtų polių skaičių galima rasti nurodant srovės kryptį joje ir pritaikius stulpelio taisyklę jėgos linijų aplink plyšius krypčiai nustatyti.
Turbinos turi pastovų sukimosi greitį
Kaplan turbinos montavimas. Visi elektros energijos generavimo agregatai turi būti sinchronizuoti. Kitaip tariant, svarbu, kad jie išlaikytų tikslų sukimosi greitį. Siekiant užtikrinti pakankamą elektros energijos kokybę. Įrenginys, veikiantis elektra, yra skirtas naudoti tam tikro dažnio kintamąją srovę. Šis dažnis priklauso nuo generatoriaus sukimosi greičio, t.y. kiek kartų per sekundę rotoriaus magnetai praeina pro statoriaus apvijas. Šis dažnis išreiškiamas ciklais per sekundę arba hercais, pavadintais vokiečių fiziko Heinricho Hertzo, kuris įrodė radijo bangų egzistavimą, vardu.
Jeigu pusapvijos sujungiamos nugarėlėmis, t.y. trumpiklis tarp gnybtų K 1 ir K 2 (9 pav., b), tada tokia apvija sukurs dvi poras polių (p \u003d 2). Pasirinkus srovės kryptį, laukas tarp 2 ir 3, 4 ir 5, 6 ir 7, 8 ir 1 anuliuoja vienas kitą.
Pusinės apvijos gali būti jungiamos atgal į galą, t.y. džemperiai tarp gnybtų H 1 ir K 2, H 2 ir K 1 (9 pav., c), tada apvija taip pat sukurs dvi poras polių (p = 2).
Šiaurės Amerikoje standartinis kintamosios srovės ciklas yra 60 kartų per sekundę, o Europoje – 50 kartų per sekundę. Tai reiškia, kad laikrodis, sukurtas veikti 60 Hz dažniu, bus lėtesnis, kai įjungtas į europietišką lizdą. Kad būtų tiekiama 60 Hz kintamoji srovė, jie turi suktis 5 apsisukimų per minutę greičiu. Štai formulė, kurią naudojo inžinieriai.
Variklio užvedimo būdai
Michaelas Faradėjus, britų fizikas ir chemikas, atranda indukcijos reiškinį. Pirmiausia mokslininkas sukūrė elektros srovę, judindamas magnetą pirmyn ir atgal metalinėje ritėje. Novatoriški Faradėjaus atradimo principai sparčiai perimami ir naudojami siekiant patenkinti pramonės amžiaus gamybos poreikius. Remiantis šiais principais, buvo sukurtas pirmasis elektros generatorius, šiuolaikinių jėgos agregatų pirmtakas. Faradėjaus eksperimentai išprovokavo kitų tyrinėtojų pirmojo elektros variklio ir pirmojo transformatoriaus išradimą.
Taigi, yra du būdai perjungti apviją į mažesnį polių porų skaičių santykiu 2:1. Pirmasis būdas yra perėjimas nuo nuoseklaus pusinių apvijų prijungimo prie anti-serijinio jungimo, antrasis – nuo nuosekliojo prijungimo prie antilygiagrečiojo. Apsvarstykite kiekvieną metodą, susijusį su trifazio variklio apvija.
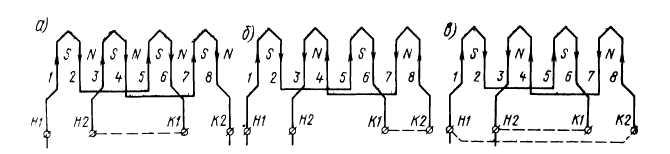
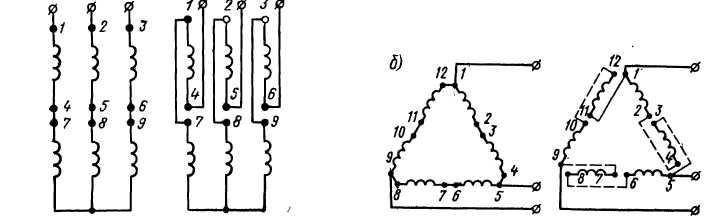
Pirmuoju perjungimo būdu apvija, sujungta žvaigždute, turi turėti 9 gnybtus ant skydo (5.10 pav., a), o sujungiant trikampiu – 12 gnybtų (5.10 pav., b). Po perjungimo apvijų sujungimo pobūdis nesikeičia, tai yra, žvaigždė persijungia į žvaigždę, o trikampis - į trikampį.
Variklio galia pirmuoju perjungimo būdu išlieka pastovi, todėl vardinis ir maksimalus variklio sukimo momentas keičiasi. Bendras variklio ir įvairių mechanizmų mechaninių charakteristikų svarstymas (5.10 pav., c) rodo, kad šis perjungimo būdas tinkamiausias metalo pjovimo staklių greičiui valdyti.
Jūrų elektrinėse kėlimo įtaisų pavarose plačiai naudojami vėjarodžiai, svirties, trijų greičių asinchroniniai varikliai su trimis atskiromis apvijomis ant statoriaus skirtingam polių porų skaičiui.
Antruoju perjungimo būdu žvaigždute sujungta apvija turi tik 6 laidus (5.11 pav., a). Po perjungimo gaunama dvigubos žvaigždės apvijos jungtis. Variklio galia šiuo atveju padvigubėja, o vardinis sukimo momentas išlieka pastovus.
Bendras variklio ir įvairių mechanizmų mechaninių charakteristikų svarstymas (5.11 pav., b) rodo, kad krovinio kėlimo įrenginių sukimosi greičiui valdyti patartina naudoti antrąjį perjungimo būdą.
Jei apvija prijungta trikampiu, tada perjungus pagal antrąjį metodą, gaunamas dvigubos žvaigždės jungtis. Variklio galia padidinama 15%.
Nagrinėjami paprasčiausi apvijų perjungimo būdai, kurie suteikia du greičio žingsnius. Sudėtingesniu trifazių apvijų perjungimu galite gauti daugiausiai trijų ar net keturių greičio pakopų. skirtingas polių santykis. Pavyzdžiui, MAP serijos buitiniai varikliai su viena trifaze apvija turi tris greičius (MAP-42/8-4-2, galia 0,8/1, 8/2 kW, sukimosi greitis 700/1400/2800 aps./min.) ( MAP-52/8-6-4-2, galia 1,2/2,5/3/4 kW, sukimosi greitis 460/700/920/1440 aps./min.). Daugiau nei keturi greičiai praktiškai nepasitaiko, nes apvija ir jos perjungimas yra daug sudėtingesni. Variklio MAP-52/8-6-4-2 terminalo plokštėje yra 22 laidai.
Jūrų elektrinėse kėlimo įtaisų pavarose plačiai naudojami vėjarodžiai, svirties, trijų greičių asinchroniniai varikliai su trimis atskiromis apvijomis ant statoriaus skirtingam polių porų skaičiui. Sukimosi dažnis
5.10 pav. Pirmasis būdas perjungti trifazę apviją, sujungtą žvaigždute,
ir trikampis, ir atitinkamos mechaninės kraujospūdžio charakteristikos.
reguliuojamas įjungiant vieną ar kitą apviją, tačiau pačios apvijos nesijungia.
Buitinė pramonė gamina kelių greičių asinchroninius MAP serijos variklius, skirtus jūrinėms elektrinėms pavaroms, kurių greičio reguliavimo diapazonas yra 6: 1 arba 7: 1. Pirmojo greičio apvija paprastai turi 26 arba 28 polius.
Polių poros perjungimo reguliavimas yra labai ekonomiškas, nes rotorius sukasi pastoviu dažniu su slydimu vardiniame diapazone, o variklio grandinėje nėra papildomų rezistorių. Rimtas šio metodo trūkumas yra gradacija ir ribotas greičių skaičius.
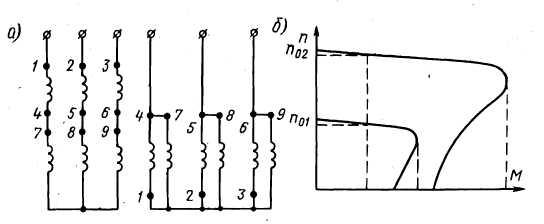
5.11 pav. Antrasis būdas perjungti trifazę apviją, sujungtą žvaigždute, ir
atitinkamos asinchroninio variklio mechaninės charakteristikos
Sukimosi greičio reguliavimas keičiant maitinimo tinklo srovės dažnį (dažnio reguliavimas).
Šis valdymo metodas pagrįstas sinchroninio greičio n 0 keitimu, kuris yra proporcingas srovės dažniui statoriaus apvijoje. Šis reglamentas reikalauja kintamo dažnio maitinimo šaltinio f. Kaip šaltinis naudojami elektromagnetiniai ir puslaidininkiniai dažnio keitikliai. Tačiau reikia nepamiršti, kad kartu su maitinimo įtampos f dažnio pasikeitimu pasikeis ir didžiausias variklio elektromagnetinis sukimo momentas. Todėl norint išlaikyti reikiamą variklio perkrovos galią, galios koeficientą ir efektyvumą, reikia keisti tinklo įtampą U kartu su dažnio f pasikeitimu, kad jų santykis išliktų pastovus:
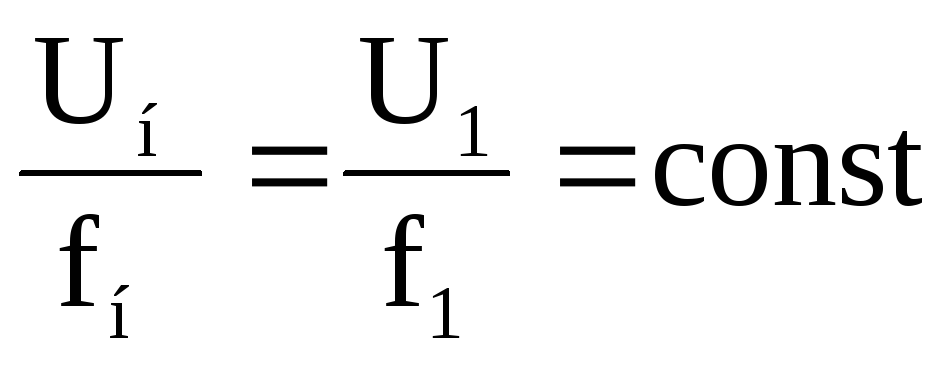
 ;
;
Dažnio valdymas leidžia sklandžiai keisti variklių sūkius plačiame diapazone (iki 12:1).
Greičio reguliavimas keičiant srovės dažnį yra racionaliausias ir ekonomiškiausias būdas. Pagrindiniai jo privalumai:
Naudojamas įprastas voverės narvelio variklis;
Variklio nuostolių reguliavimas yra ekonomiškas;
Pasiekiamas didelis reguliavimo diapazonas ir sklandumas;
Išsaugomas mechaninių charakteristikų standumas, taigi ir pavaros stabilumas;
Regeneracinį stabdymą galima atlikti beveik iki visiško sustojimo.
Tuo pačiu yra žinoma, kad laivo jėgainės srovės dažnis yra palaikomas pastovus ir reikalingas atskiras dažnio keitiklis variklio sūkiams reguliuoti.
Šiuolaikinė dažnio valdoma elektrinė pavara susideda iš asinchroninio arba sinchroninio elektros variklio ir dažnio keitiklio (5.12 pav.).
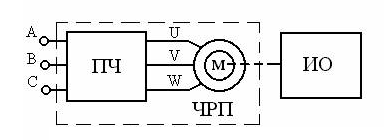
5.12 pav. Kintamo dažnio pavara
Dažnio keitiklis varo elektros variklį ir yra elektroninis statinis įtaisas. Keitiklio išvestyje generuojama kintamos amplitudės ir dažnio elektros įtampa. Pavadinimas „kintamo dažnio elektrinė pavara“ atsirado dėl to, kad variklio greičio valdymas atliekamas keičiant iš dažnio keitiklio varikliui tiekiamos maitinimo įtampos dažnį.
Pastaraisiais metais laivuose plačiai ir sėkmingai pradėta diegti dažniu valdoma elektrinė pavara tiek įvairioms technologinėms problemoms spręsti, tiek elektros varymo sistemose. Taip yra visų pirma dėl to, kad buvo sukurti ir sukurti dažnio keitikliai, pagrįsti iš esmės nauja elementų baze, daugiausia naudojant IGBT izoliuotus dvipolius tranzistorius.
Sinchroniniame elektros variklyje rotoriaus greitis pastovioje būsenoje yra lygus statoriaus magnetinio lauko greičiui.
Asinchroniniame elektros variklyje rotoriaus greitis pastovioje būsenoje skiriasi nuo greičio slydimo dydžiu.
Magnetinio lauko sukimosi dažnis priklauso nuo maitinimo įtampos dažnio. Kai elektros variklio statoriaus apvija tiekiama trifaze įtampa su dažniu, susidaro besisukantis magnetinis laukas. Šio lauko sukimosi greitis nustatomas pagal gerai žinomą formulę
kur yra statoriaus polių porų skaičius.
Perėjimas nuo lauko sukimosi greičio, išmatuoto radianais, prie sukimosi dažnio, išreikšto apsisukimais per minutę, atliekamas pagal šią formulę
kur 60 yra dimensijos konversijos koeficientas.
Pakeitę lauko sukimosi greitį į šią lygtį, gauname tai
Taigi sinchroninių ir asinchroninių variklių rotoriaus greitis priklauso nuo maitinimo įtampos dažnio.
Šia priklausomybe pagrįstas dažnio reguliavimo metodas.
Keičiant dažnį keitikliu prie variklio įleidimo angos reguliuojame rotoriaus greitį.
Labiausiai paplitusioje dažnio valdomoje pavaroje, pagrįstoje asinchroniniais voverės narveliais varikliais, naudojamas skaliarinis ir vektorinis dažnio valdymas.
Su skaliariniu valdymu pagal tam tikrą dėsnį jie keičia varikliui tiekiamos įtampos amplitudę ir dažnį. Pakeitus maitinimo įtampos dažnį, nukrypstama nuo apskaičiuotų variklio didžiausių ir paleidimo momentų, efektyvumo, galios koeficiento verčių. Todėl, norint išlaikyti reikalingas variklio eksploatacines charakteristikas, reikia tuo pačiu metu keisti įtampos amplitudę keičiant dažnį.
Esamuose dažnio keitikliuose su skaliariniu valdymu maksimalaus variklio sukimo momento ir veleno pasipriešinimo momento santykis dažniausiai išlaikomas pastovus. Tai yra, pasikeitus dažniui, įtampos amplitudė kinta taip, kad maksimalaus variklio sukimo momento ir esamos apkrovos momento santykis išlieka nepakitęs. Šis santykis vadinamas variklio perkrovos galia.
Su nuolatine perkrovos galia, vardiniu galios koeficientu ir efektyvumu variklis visame greičio reguliavimo diapazone praktiškai nesikeičia.
Didžiausias variklio sukuriamas sukimo momentas nustatomas pagal tokį ryšį
kur yra pastovus koeficientas.
Todėl maitinimo įtampos priklausomybę nuo dažnio lemia elektros variklio veleno apkrovos pobūdis.
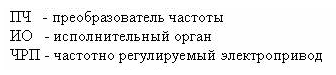
Esant pastoviam apkrovos sukimo momentui, išlaikomas santykis U/f = const, o iš tikrųjų didžiausias variklio sukimo momentas yra pastovus. Maitinimo įtampos priklausomybės nuo dažnio pobūdis atveju, kai apkrovos sukimo momentas yra pastovus, parodyta fig. 5.13(a). Tiesios linijos pasvirimo kampas grafike priklauso nuo pasipriešinimo momento verčių ir didžiausio variklio sukimo momento.
Tuo pačiu metu, esant žemiems dažniams, pradedant nuo tam tikro dažnio vertės, didžiausias variklio sukimo momentas pradeda kristi. Norėdami tai kompensuoti ir padidinti paleidimo momentą, naudojamas maitinimo įtampos lygio padidėjimas.
Esant ventiliatoriaus apkrovai, realizuojama priklausomybė U/f 2 = const. Maitinimo įtampos priklausomybės nuo dažnio pobūdis šiuo atveju parodytas 5.13 (b) pav.
5.13 pav. Maitinimo įtampos priklausomybės nuo dažnio pobūdis:
a) esant pastoviam apkrovos sukimo momentui
b) su ventiliatoriaus apkrovos sukimo momentu
Reguliuojant žemų dažnių srityje, mažėja ir didžiausias sukimo momentas, tačiau tokio tipo apkrovai tai nėra labai svarbu.
Naudojant didžiausio sukimo momento priklausomybę nuo įtampos ir dažnio, bet kokio tipo apkrovai galima pavaizduoti U ir f.
Svarbus skaliarinio metodo privalumas yra galimybė vienu metu valdyti elektros variklių grupę.
Skaliarinio valdymo pakanka daugeliui praktinių kintamojo dažnio pavaros pritaikymų, kai variklio greičio reguliavimo diapazonas yra iki 1:40.
vektorinis valdymas leidžia žymiai padidinti valdymo diapazoną, valdymo tikslumą, padidinti elektros pavaros greitį. Šis metodas leidžia tiesiogiai valdyti variklio sukimo momentą.
Sukimo momentą lemia statoriaus srovė, kuri sukuria jaudinantį magnetinį lauką. Su tiesioginiu sukimo momento valdymu, be statoriaus srovės amplitudės ir fazės, būtina keisti, tai yra, srovės vektorių. Tai yra termino „vektoriaus kontrolė“ priežastis.
Norint valdyti srovės vektorių, taigi ir statoriaus magnetinio srauto padėtį besisukančio rotoriaus atžvilgiu, bet kuriuo metu reikia žinoti tikslią rotoriaus padėtį. Problema sprendžiama arba nuotolinio rotoriaus padėties jutiklio pagalba, arba rotoriaus padėties nustatymu skaičiuojant kitus variklio parametrus. Kaip šie parametrai naudojami statoriaus apvijų srovės ir įtampa.
Pigesnis yra VFD su vektoriniu valdymu be greičio grįžtamojo ryšio jutiklio, tačiau vektorinis valdymas reikalauja didelio kiekio ir didelio dažnio keitiklio skaičiavimų.
Be to, norint tiesiogiai valdyti sukimo momentą esant mažam, artimam nuliui sukimosi greičiui, dažnio valdomos elektrinės pavaros veikimas be greičio grįžtamojo ryšio yra neįmanomas.
Vektorinis valdymas su greičio grįžtamojo ryšio jutikliu suteikia valdymo diapazoną iki 1:1000 ir didesnį, greičio reguliavimo tikslumas – šimtąsias procentų dalis, sukimo momento tikslumas – kelis procentus.
Dažnio keitiklis yra įtaisas, skirtas vieno dažnio kintamąją srovę (įtampą) paversti kito dažnio kintamąja srove (įtampa).
Šiuolaikinių keitiklių išėjimo dažnis gali skirtis plačiame diapazone ir būti didesnis ir mažesnis už tinklo dažnį.
Bet kurio dažnio keitiklio grandinė susideda iš galios ir valdymo dalių. Konverterių galios dalis dažniausiai gaminama ant tiristorių arba tranzistorių, kurie veikia elektroninio jungiklio režimu. Valdymo dalis vykdoma skaitmeniniais mikroprocesoriais ir užtikrina galios elektroninių raktų valdymą bei daugybę pagalbinių užduočių (valdymas, diagnostika, apsauga).
Reguliuojamose elektrinėse pavarose naudojami dažnio keitikliai, priklausomai nuo maitinimo bloko struktūros ir veikimo principo, skirstomi į dvi klases:
1. Dažnio keitikliai su ryškia tarpine nuolatinės srovės grandimi.
2. Dažnio keitikliai su tiesioginiu pajungimu (be tarpinės nuolatinės srovės grandies).
Kiekviena iš esamų keitiklių klasių turi savo privalumų ir trūkumų, kurie lemia kiekvieno iš jų racionalaus taikymo sritį.
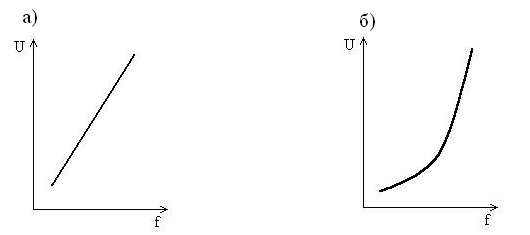
Konvertatoriams su tiesioginiu prijungimu (5.14 pav.) galios dalis yra valdomas lygintuvas ir gaminamas ant neužrakinamų tiristorių. Valdymo sistema paeiliui atrakina tiristorių grupes ir prijungia variklio statoriaus apvijas į elektros tinklą.
Ryžiai. 5.14 Dažnio keitiklis su tiesioginiu prijungimu
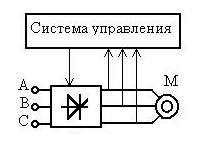
Taigi keitiklio išėjimo įtampa susidaro iš įvesties įtampos sinusoidų „nupjautų“ sekcijų. 5.15 paveiksle parodytas vienos iš apkrovos fazių išėjimo įtampos generavimo pavyzdys.
5.15 pav. Išėjimo įtampos susidarymas vienai iš apkrovos fazių
Keitiklio įėjime veikia trifazė sinusinė įtampa u a, u v, u s. Išėjimo įtampa u out turi nesinusinę "pjūklo danties" formą, kurią sąlyginai galima aproksimuoti sinusoidu (stora linija). Iš paveikslo matyti, kad išėjimo įtampos dažnis negali būti lygus arba didesnis už maitinimo tinklo dažnį. Jis yra diapazone nuo 0 iki 30 Hz. Dėl to nedidelis variklio sūkių skaičiaus reguliavimo diapazonas (ne daugiau kaip 1:10). Šis apribojimas neleidžia naudoti tokių keitiklių šiuolaikinėse dažnio valdomose pavarose su plačiu technologinių parametrų valdymu.
Neužrakinamų tiristorių naudojimui reikalingos gana sudėtingos valdymo sistemos, o tai padidina keitiklio kainą.
Konverterio išvestyje „nupjauta“ sinusinė banga yra aukštesnių harmonikų šaltinis, dėl kurio atsiranda papildomų nuostolių elektros variklyje, elektros mašinos perkaitimas, sukimo momento sumažėjimas, labai stiprūs trikdžiai maitinimo tinkle. Naudojant kompensacinius įrenginius, padidėja sąnaudos, svoris, matmenys ir sumažėja efektyvumas. sistemos kaip visuma.
Kartu su išvardintais tiesioginio ryšio keitiklių trūkumais jie turi ir tam tikrų privalumų. Jie apima:
Praktiškai didžiausias efektyvumas, palyginti su kitais keitikliais (98,5% ir daugiau),
Galimybė dirbti su aukšta įtampa ir srovėmis, todėl jas galima naudoti galingose aukštos įtampos pavarose,
Santykinis pigumas, nepaisant absoliučių sąnaudų padidėjimo dėl valdymo grandinių ir papildomos įrangos.
Panašios keitiklių grandinės naudojamos senose pavarose, o naujos konstrukcijos praktiškai nėra sukurtos.
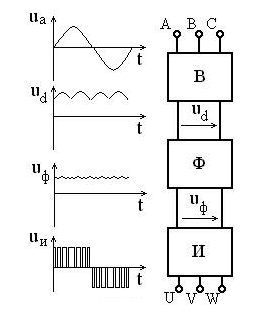
Šiuolaikinėse kintamo dažnio pavarose plačiausiai naudojami keitikliai su ryškia nuolatinės srovės jungtimi (5.16. pav.).
Šios klasės keitikliai naudoja dvigubą elektros energijos konvertavimą: įėjimo sinusoidinė įtampa su pastovia amplitudė ir dažnis lygintuve ištaisoma (V), filtruojama filtru (F), išlyginama ir vėl konvertuojama keitikliu (I). į kintamą kintamo dažnio ir amplitudės įtampą. Dvigubas energijos konvertavimas sumažina efektyvumą. ir tam tikrą svorio ir dydžio rodiklių pablogėjimą, palyginti su keitikliais su tiesioginiu ryšiu.
5.16 pav. Dažnio keitiklis su nuolatinės srovės jungtimi
Sinusoidinei kintamajai įtampai formuoti naudojami autonominiai įtampos keitikliai ir autonominiai srovės keitikliai.
Inverteriuose kaip elektroniniai jungikliai naudojami rakinami tiristoriai GTO ir jų pažangios modifikacijos GCT, IGCT, SGCT bei izoliuotų vartų dvipoliai tranzistoriai IGBT.
Pagrindinis tiristorių dažnio keitiklių privalumas, kaip ir tiesioginio ryšio grandinėje, yra galimybė dirbti su didelėmis srovėmis ir įtampomis, atlaikant nuolatinę apkrovą ir impulsų poveikį.
Jie turi didesnį efektyvumą (iki 98%), palyginti su IGBT tranzistorių keitikliais (95–98%).
Tiristorių pagrindu pagaminti dažnio keitikliai šiuo metu užima dominuojančią padėtį aukštos įtampos pavarose, kurių galia yra nuo šimtų kilovatų iki dešimčių megavatų, kurių išėjimo įtampa yra 3–10 kV ir didesnė. Tačiau jų kaina už kW išėjimo galios yra didžiausia aukštos įtampos keitiklių klasėje.
Dar visai neseniai GTO dažnio keitikliai buvo pagrindinė žemos įtampos kintamo dažnio pavaros dalis. Tačiau atsiradus IGBT tranzistoriams, įvyko „natūrali atranka“, ir šiandien jais pagrįsti keitikliai yra visuotinai pripažinti lyderiai žemos įtampos kintamo dažnio pavaros srityje.
Tiristorius yra pusiau valdomas įrenginys: norint jį įjungti, pakanka į valdymo išvestį įvesti trumpą impulsą, tačiau norint jį išjungti, reikia arba įjungti atvirkštinę įtampą, arba sumažinti įjungiamą srovę iki nulio. Tam reikalinga sudėtinga ir sudėtinga tiristoriaus dažnio keitiklio valdymo sistema.
Izoliuotų vartų dvipoliai tranzistoriai IGBT skiriasi nuo tiristorių pilnu valdymu, paprasta mažos galios valdymo sistema, didžiausiu veikimo dažniu
Dėl to IGBT pagrindu sukurti dažnio keitikliai leidžia išplėsti variklio greičio reguliavimo diapazoną ir padidinti visos pavaros greitį.
Asinchroniniam vektoriui valdomai pavarai IGBT keitikliai leidžia veikti mažu greičiu be grįžtamojo ryšio jutiklio.
Naudojant IGBT su didesniu perjungimo dažniu kartu su mikroprocesorine valdymo sistema dažnio keitikliuose, sumažėja tiristoriniams keitikliams būdingų aukštesnių harmonikų lygis. Dėl to sumažėja papildomų nuostolių elektros variklio apvijose ir magnetinėje grandinėje, sumažėja elektros mašinos įkaitimas, sumažėja sukimo momento bangavimas ir pašalinamas vadinamasis rotoriaus „vaikščiojimas“. žemo dažnio regione. Sumažėja nuostoliai transformatoriuose, kondensatorių baterijose, pailgėja jų tarnavimo laikas ir laidų izoliacija, sumažėja apsauginių įtaisų klaidingų aliarmų ir indukcinių matavimo prietaisų klaidų skaičius.
IGBT tranzistorių pagrindu pagaminti keitikliai, lyginant su tiristoriniais konverteriais, turinčiais tą pačią išėjimo galią, yra mažesnio dydžio, svorio, dėl modulinės elektroninių jungiklių konstrukcijos didesnio patikimumo, geresnio šilumos pašalinimo nuo modulio paviršiaus bei mažiau konstrukcinių elementų.
Jie suteikia pilnesnę apsaugą nuo viršįtampio srovės ir viršįtampio, o tai žymiai sumažina gedimų ir pavaros pažeidimo tikimybę.
Šiuo metu žemos įtampos IGBT keitikliai turi didesnę kainą už išėjimo galios vienetą dėl santykinio tranzistorių modulių gamybos sudėtingumo. Tačiau pagal kainos ir kokybės santykį, remiantis išvardintais privalumais, jie akivaizdžiai lenkia tiristorinius keitiklius, be to, per pastaruosius metus nuolat mažėjo IGBT modulių kainos.
Pagrindinė kliūtis jų naudojimui aukštos įtampos tiesioginio dažnio keitimo pavarose ir didesnėse nei 1-2 MW galiose yra šiuo metu technologiniai apribojimai. Padidėjus perjungimo įtampai ir darbinei srovei, padidėja tranzistoriaus modulio dydis, be to, reikalingas efektyvesnis šilumos pašalinimas iš silicio kristalo.
Naujos bipolinių tranzistorių gamybos technologijos yra skirtos šiems apribojimams įveikti, o IGBT panaudojimo pažadas yra labai didelis ir aukštos įtampos pavarose. Šiuo metu IGBT tranzistoriai naudojami aukštos įtampos keitikliuose kelių atskirų modulių, sujungtų nuosekliai, pavidalu.
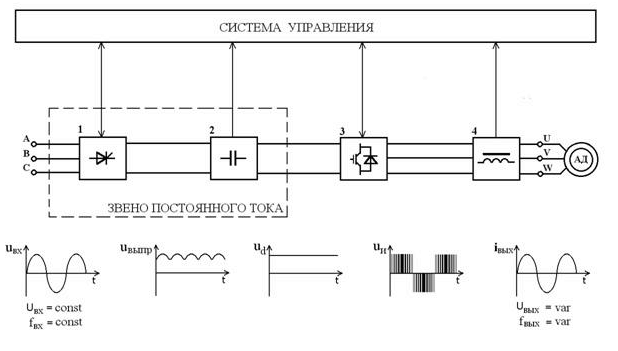
Tipiška žemos įtampos IGBT dažnio keitiklio schema parodyta fig. 5.17 Paveikslo apačioje yra kiekvieno keitiklio elemento išėjimo įtampų ir srovių grafikai.
Maitinimo tinklo kintamoji įtampa (u in) su pastovia amplitudė ir dažniu (U in = const, f in = const) tiekiama į valdomą arba nevaldomą lygintuvą (1).
Filtras (2) naudojamas išlygintos įtampos (u rect.) bangavimui išlyginti. Lygintuvas ir talpinis filtras (2) sudaro nuolatinės srovės jungtį.
Iš filtro išėjimo pastovi įtampa u d tiekiama į autonominio impulsinio keitiklio (3) įėjimą.
Šiuolaikinių žemos įtampos keitiklių autonominis keitiklis, kaip minėta, yra pagrįstas galios dvipoliais tranzistoriais su izoliuotais vartais IGBT. Aptariamame paveikslėlyje parodyta dažnio keitiklio grandinė su autonominiu įtampos keitikliu kaip plačiausiai naudojama.
Ryžiai. 5.17 Tipinė IGBT dažnio keitiklio grandinė
Inverteris konvertuoja nuolatinę įtampą u d į trifazę (arba vienfazę) impulsinę įtampą u ir kintamą amplitudę bei dažnį. Pagal valdymo sistemos signalus kiekviena elektros variklio apvija per atitinkamus keitiklio galios tranzistorius prijungiama prie nuolatinės srovės grandinės teigiamų ir neigiamų polių. Kiekvienos apvijos prijungimo trukmė impulsų pasikartojimo laikotarpiu yra moduliuojama pagal sinusoidinį dėsnį. Didžiausias impulsų plotis suteikiamas pusės ciklo viduryje ir mažėja pusės ciklo pradžioje ir pabaigoje. Taigi valdymo sistema užtikrina variklio apvijų įtampos impulsų pločio moduliavimą (PWM). Įtampos amplitudę ir dažnį lemia moduliuojančios sinusinės funkcijos parametrai.
Esant aukštam PWM nešlio dažniui (2 ... 15 kHz), variklio apvijos veikia kaip filtras dėl didelio induktyvumo. Todėl juose teka beveik sinusinės srovės.
Konverterių su valdomu lygintuvu (1) grandinėse įtampos amplitudės pokytis u ir gali būti pasiektas reguliuojant pastovios įtampos dydį u d , o dažnio pokytis yra keitiklio veikimo režimas.
Jei reikia, autonominio keitiklio išėjime įrengiamas filtras (4), kuris išlygins srovės bangavimą. (IGBT keitiklių grandinėse dėl žemo aukštesnių harmonikų lygio išėjimo įtampoje filtro praktiškai nereikia.)
Taigi dažnio keitiklio išėjime susidaro trifazė (arba vienfazė) kintamo dažnio ir amplitudės kintamoji įtampa (U out = var, f out = var).
Dažnai reikia sumažinti variklio, kuris atlieka tam tikras užduotis mechanizme, sukimosi greitį. Sumažinti elektros variklio apsisukimų skaičių galima naudojant standartines valdymo grandines.
Kintamosios srovės varikliai dažnai naudojami žmogaus veikloje, metalo apdirbimo staklėse, transporte, kranų mechanizmuose ir kituose įrenginiuose. Varikliai paverčia kintamosios srovės tiekimo energiją į veleno ir mazgų sukimąsi. Daugiausia naudojami kintamosios srovės asinchroniniai varikliai.
Rotorius, taip pat ir variklio statorius, susideda iš vielos ritinių, išdėstytų specialaus plieno šerdyje. Elektros variklių klasifikacija išplaukia iš apvijos klojimo būdo.
Į šerdį įkišama žalvario ir vario strypų apvija, išilgai kraštų sumontuoti žiedai. Tokia vielos ritė vadinama voverės narvelio (CS) rotoriumi. Maži galios varikliai turi strypus ir diskus, kurie buvo sulieti. Elektros varikliams su dideliu sukimo momentu detalės liejamos atskirai ir suvirinamos. Statoriaus apviją galima prijungti dviem būdais: trikampiu, žvaigždute.
Fazinis rotorius susideda iš 3 fazių rotoriaus apvijos, slydimo žiedais ir šepečiais sujungtos su maitinimo šaltiniu. Apvija sujungta "žvaigždute".

Asinchroninio variklio apsisukimų skaičiaus apskaičiavimas
Įprastas staklių ir kėlimo įrenginių variklis yra variklis su voverės narveliu, todėl reikėtų atsižvelgti į jo skaičiavimo pavyzdį. Tinklo įtampa tiekiama į statoriaus apviją. Apvijos yra paslinktos viena nuo kitos 120 laipsnių kampu. Atsirandantis elektromagnetinės indukcijos laukas apvijoje sužadina elektros srovę. Rotorius pradeda veikti veikiamas EMC.
Pagrindinė variklio charakteristika yra apsisukimų skaičius per minutę. Apskaičiuokime šią vertę:
n = 60 f/p, aps./min.;
čia f – tinklo dažnis, hercai, p – statoriaus polių skaičius (poromis).
Ant variklio korpuso yra duomenų lentelė. Jei jo nėra, galite patys apskaičiuoti įrangos veleno apsisukimų skaičių, naudodami kitus turimus duomenis. Skaičiavimas atliekamas trimis būdais.
- Ričių skaičius, lyginamas su skirtingų įtampų normomis, apskaičiuojamas iš lentelės:

- Darbo greičio apskaičiavimas apvijos skersmens žingsniu pagal formulę:
2 p \u003d Z 1 / y, kur 2p yra polių skaičius, Z 1 yra statoriaus plyšių skaičius, y yra apvijos žingsnis.
Iš lentelės pasirenkame tinkamą variklio sūkių skaičių:

- Apskaičiuojame polių skaičių pagal šerdies parametrus pagal formulę:
2p = 0,35 Z 1 b / h arba 2 p = 0,5 D i / h,
čia 2p – polių skaičius, Z 1 – griovelių skaičius, b – danties dydis, cm, h – nugaros aukštis, cm, D i – dantų skersmuo, cm.
Remiantis skaičiavimo ir indukcijos rezultatais, seka apvijos apsisukimų skaičius ir lyginamas su variklio vertėmis pagal pasą.
Kaip pakeisti variklio greitį?
Įrangos mechanizmo sukimo momento greitį galite keisti įvairiais būdais, pavyzdžiui, mechaninės pavarų dėžės su pavarų perjungimu, sankabos ir kiti įrenginiai. Tačiau tai ne visada įmanoma. Praktiškai kintamo greičio pavarų greičiui koreguoti naudojami 7 metodai. Visi metodai yra suskirstyti į dvi pagrindines sritis.
- Magnetinio lauko korekcija įtakojant srovės dažnį, polių porų skaičiaus mažinimą arba didinimą, įtampos korekcija. Kryptis būdinga varikliams su voverės narvelio (KR) rotoriumi.
- Slydimas koreguojamas pagal maitinimo įtampą, į rotoriaus grandinę įdedant dar vieną rezistorių, nustatant dvigubą maitinimą, naudojant vožtuvų kaskadą. Ši kryptis naudojama rotoriams su fazėmis.
- „Chastotniki“ yra dviejų tipų valdymas: skaliarinis, vektorinis. Naudojant skaliarinį valdymą, įrenginiai veikia esant tam tikroms išėjimo potencialo skirtumo ir dažnio reikšmėms, jie veikia primityvioje buitinėje technikoje, pavyzdžiui, ventiliatoriuose. Naudojant vektorinį valdymą, srovės stiprumas nustatomas gana tiksliai.
- Renkantis įrenginį, lemiamą vaidmenį atlieka galios parametrai. Galios kiekis išplečia naudojimo sritį, supaprastina priežiūrą.
- Renkantis įrenginį, atsižvelgiama į tinklo darbinės įtampos intervalą, kuris sumažina jo gedimo riziką dėl staigių potencialų skirtumo pokyčių. Jei įtampa per didelė, tinklo kondensatoriai gali sprogti.
- Dažnis yra svarbus veiksnys. Jo vertę lemia gamybos reikalavimai. Mažiausia vertė rodo galimybę naudoti greitį optimaliu veikimo režimu. Norint gauti didesnį dažnio intervalą, naudojami dažnio keitikliai su vektoriniu valdymu. Realiai dažnai naudojami keitikliai, kurių dažnių intervalas yra nuo 10 iki 10 Hz.
- Dažnio keitiklis, turintis daug skirtingų išėjimų ir įėjimų, yra patogus naudoti, tačiau jo kaina yra didesnė, o nustatymas yra sunkesnis. Yra trijų tipų chastotnik jungtys: analoginė, diskretinė, skaitmeninė. Atvirkštinio tipo įvesties komandų ryšys vyksta per analogines jungtis. Skaitmeniniai gnybtai įveda signalus iš skaitmeninio tipo jutiklių.
- Renkantis dažnio keitiklio modelį, būtina įvertinti valdymo magistralę. Jo charakteristika parenkama keitiklio grandinei, kuri lemia trinkelių skaičių. Geriausias pasirinkimas yra dažnio keitiklis su jungčių skaičiaus rezervu tolesniam įrenginio modernizavimui.
- Dažnio keitikliai, kurie gali atlaikyti dideles perkrovas (15% didesnę nei variklio galia), turi pirmenybę renkantis. Kad nesuklystumėte pirkdami dažnio keitiklį, perskaitykite instrukcijas. Jame yra pagrindiniai įrangos veikimo parametrai. Jei jums reikia įrenginio maksimalioms apkrovoms, tuomet turite pasirinkti dažnio keitiklį, kuris išlaiko srovę didžiausioje darbo vietoje, didesnę nei 10% vardinės vertės.
Kaip prijungti dažnio keitiklį
Jei kabelis, skirtas prijungti prie 220 V, yra su 1 faze, taikoma "trikampio" schema. Nejunkite dažnio keitiklio, jei išėjimo srovė yra didesnė nei 50 % vardinės vertės.
Jei maitinimo kabelis yra trifazis 380 V, tada sukuriama „žvaigždė“ grandinė. Kad būtų lengviau prijungti maitinimą, pateikiami kontaktai ir gnybtai su raidėmis.
- Kontaktai R, S, T skirti maitinimo šaltiniui prijungti etapais.
- Gnybtai U , V , W yra variklio jungtis. Norėdami pakeisti, pakanka pakeisti dviejų laidų sujungimą.
Prietaisas turi turėti bloką su gnybtu prijungimui prie žemės. Daugiau informacijos apie tai, kaip prisijungti.
Kaip prižiūrėti dažnio keitiklius?
Norint ilgai eksploatuoti keitiklį, būtina stebėti jo būklę ir laikytis reikalavimų:
- Nuvalykite dulkes nuo vidinių dalių. Dulkėms pašalinti suslėgtu oru galite naudoti kompresorių. Dulkių siurblys šiems tikslams netinka.
- Periodiškai tikrinkite mazgų būklę, pakeiskite juos. Elektrolitinių kondensatorių tarnavimo laikas yra penkeri metai, saugiklių jungčių - dešimt metų. Aušinimo ventiliatoriai veikia 3 metus iki pakeitimo. Laidų kilpos naudojamos šešerius metus.
- Svarbu kontroliuoti nuolatinės srovės magistralės įtampą ir mašinos temperatūrą. Esant aukštesnei temperatūrai, šilumai laidži pasta išdžiūsta ir ardo kondensatorius. Kas 3 metus ant maitinimo gnybtų užtepamas laidžios pastos sluoksnis.
- Turi būti griežtai laikomasi darbo sąlygų ir režimo. Aplinkos temperatūra neturi viršyti 40 laipsnių. Dulkės ir drėgmė neigiamai veikia prietaiso darbinių elementų būklę.
Dažnio keitiklio atsipirkimas
Elektra nuolat brangsta, organizacijų vadovai priversti taupyti įvairiais būdais. Pramoninėje gamyboje didžiąją dalį energijos suvartoja mechanizmai, turintys elektros variklius.
Elektros mašinų ir agregatų įrenginių gamintojai siūlo specialius elektros varikliams valdyti skirtus prietaisus ir prietaisus. Tokie įrenginiai taupo elektros energiją. Jie vadinami inverteriais arba dažnio keitikliais.
Finansinės chastotnik pirkimo išlaidos ne visada pateisina santaupas, nes jų kaina yra panaši į sąnaudas. Ne visada mechanizmo pavarą galima greitai aprūpinti keitikliu. Kokie sunkumai iškyla šiuo atveju? Išanalizuokime, kaip paleisti asinchroninius variklius, kad suprastume inverterių pranašumus.
Variklio užvedimo būdai
Galima apibrėžti 4 variklių paleidimo būdus.
- Tiesioginis perjungimas, skirtas varikliams iki 10 kW. Metodas neveiksmingas pagreičiui, didėjančiam sukimo momentui, perkrovoms. Srovės yra 7 kartus didesnės už nominalią vertę.
- Įjungimas pasirenkant „trikampio“ ir „žvaigždės“ schemas.
- Minkšto starterio integravimas.
- Inverterio taikymas. Metodas ypač efektyvus variklio apsaugai, greitėjimui, sukimo momentui, energijos taupymui.
Ekonominis inverterio poveikio pagrindimas
Inverterio atsipirkimo laikas apskaičiuojamas pagal pirkimo išlaidų ir sutaupytos energijos santykį. Paprastai sutaupoma nuo 20% iki 40% vardinės variklio galios.
Išlaidos sumažina veiksnius, didinančius dažnio keitiklių našumą:
- Sumažėjusios priežiūros išlaidos.
- Variklio tarnavimo laiko padidėjimas.
Sutaupytos lėšos:
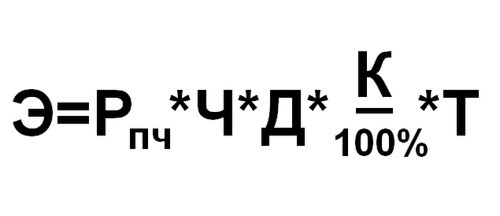
kur E - pinigų taupymas rubliais;
Ppch - inverterio galia;
H - darbo valandos per dieną;
D yra dienų skaičius;
K – numatomo sutaupymo procento koeficientas;
T yra energijos tarifas rubliais.
Atsipirkimo laikas yra lygus keitiklio pirkimo kainos ir sutaupytų pinigų santykiui. Skaičiavimai rodo, kad atsipirkimo laikotarpis yra nuo 3 mėnesių iki 3 metų. Tai priklauso nuo variklio galios.