Variklio sukurtas momentas yra lygus elektromagnetinei galiai, padalytai iš sinchroninio elektros pavaros sukimosi greičio.
M \u003d P em / ω 0
Elektromagnetinė galia yra galia, perduodama per oro tarpą iš statoriaus į rotorių, ir ji yra lygi nuostoliams rotoriuje, kurie nustatomi pagal formulę:
P em \u003d m I 2 2 (r 2 '/s)
m yra fazių skaičius.
M \u003d M em \u003d (Pm / ω 0) (I 2') 2 (r 2'/s)
Elektromechaninė charakteristika indukcinis variklis yra I2' priklausomybė nuo slydimo. Bet kadangi indukcinė mašina veikia tik kaip elektros variklis, pagrindinė charakteristika yra mechaninė charakteristika.
M \u003d Me m \u003d (Pm / ω 0) (I 2 ') 2 (r 2 '/s) - supaprastinta mechaninės charakteristikos išraiška.
Pakeitę dabartinę reikšmę šia išraiška, gauname: M \u003d / [ω 0 [(r 1 + r 2 '/s) 2 + (x 1 + x 2 ') 2 ]]
Vietoj ω 0 reikia pakeisti mechaninį greitį, dėl kurio sumažėja polių porų skaičius.
M = / [ω 0 [(r 1 + r 2 '/s) 2 + (x 1 + x 2 ') 2 ]] yra lygtis mechaninės charakteristikos asinchroninis variklis.
Kai asinchroninis variklis pereina į generatoriaus režimą, sukimosi greitis ω > ω 0 ir slydimas tampa neigiamas (s Kai slydimas pasikeičia iš 0 į +∞, režimas vadinamas "elektromagnetinio stabdymo režimu".
Atsižvelgiant į slydimo vertes nuo o iki +∞, gauname charakteristikas:
Visiška asinchroninio variklio mechaninė charakteristika.
Kaip matyti iš mechaninės charakteristikos, ji turi du kraštutinumus: vieną slydimo pokyčio segmente srityje nuo 0 iki +∞, kitą segmente nuo 0 iki -∞. dM/ds = 0
M max = / ] + nurodo variklio režimą. - nurodo generatoriaus režimą.
M max \u003d M cr M cr - kritinis momentas.
Slydimas, kai momentas pasiekia maksimumą, vadinamas kritiniu slydimu ir nustatomas pagal formulę: s cr = ±
Kritinis slydimas turi tą pačią reikšmę tiek variklio, tiek generatoriaus režimuose.
M cr reikšmę galima gauti pakeitus kritinio slydimo reikšmę momento formulėje.
Momentas, kai slydimas lygus 1, vadinamas paleidimo momentu. Pradinio sukimo momento išraišką galima gauti formulėje pakeitus 1:
M p \u003d / [ω 0 [(r 1 + r 2 ') 2 + (x 1 + x 2 ') 2 ]]
Kadangi didžiausio momento vardiklis formulėje yra keliomis eilėmis didesnis už U f, įprasta laikyti M kr ≡U f 2 .
Kritinis slydimas priklauso nuo rotoriaus apvijos R 2 ' aktyviosios varžos vertės. Pradinis sukimo momentas, kaip matyti iš formulės, priklauso nuo aktyvus pasipriešinimas rotorius r 2 '. ši paleidimo momento savybė naudojama asinchroniniuose varikliuose su faziniu rotoriumi, kuriuose paleidimo momentas padidinamas įvedant aktyviąją varžą į rotoriaus grandinę.
7. Tuščiosios eigos transformatorius
Režimas tuščiąja eiga transformatorius vadinamas veikimo režimu, kai viena iš transformatoriaus apvijų maitinama iš šaltinio su kintamąja įtampa ir su atviromis kitų apvijų grandinėmis. Toks veikimo režimas gali būti tikrame transformatoriuje, kai jis prijungtas prie tinklo, o apkrova, tiekiama iš jo antrinės apvijos, dar neįjungta. Srovė I 0 praeina per pirminę transformatoriaus apviją, tuo pačiu metu antrinė apvija nėra srovės, nes grandinė atvira. Srovė I 0, eidama per pirminę apviją, magnetinėje grandinėje sukuria sinusiškai besikeičiantį dėklą Ф 0, kuris dėl magnetinių nuostolių fazėje atsilieka nuo srovės nuostolių kampu δ. 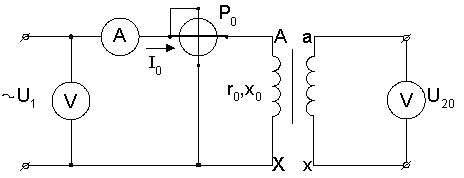
![]()
Grafiškai išreikšta elektromagnetinio momento priklausomybė nuo slydimo vadinama mechaninė charakteristika indukcinis variklis (3.3 pav.).
Ryžiai. 3.3. Asinchroninio variklio mechaninė charakteristika
Supaprastinta indukcinio variklio elektromagnetinio sukimo momento apskaičiavimo formulė (Kloso formulė) gali būti naudojama mechaninei charakteristikai sukurti

Šiuo atveju kritinis slydimas nustatomas pagal formulę
![]()
kur λ m \u003d M max / M nom - variklio perkrovos galia.
Skaičiuojant mechaninę charakteristiką, reikia turėti omenyje, kad slydimo vertėms viršijant kritinę vertę, skaičiavimų tikslumas smarkiai sumažėja. Taip yra dėl asinchroninio variklio ekvivalentinės grandinės parametrų pasikeitimo, atsirandančio dėl statoriaus ir rotoriaus dantų magnetinio prisotinimo, ir dėl rotoriaus apvijos srovės dažnio padidėjimo.
Asinchroninio variklio mechaninių charakteristikų forma labai priklauso nuo statoriaus apvijai taikomos įtampos dydžio U 1 (3.4 pav.) ir rotoriaus apvijos aktyviąją varžą r"2 (3.5 pav.).

Ryžiai. 3.4. Įtampos įtaka U 1 apie asinchroninio variklio mechanines charakteristikas
Asinchroninių variklių kataloguose pateiktuose duomenyse dažniausiai nėra informacijos apie ekvivalentinės grandinės parametrus, todėl sunku pritaikyti elektromagnetinio sukimo momento skaičiavimo formules. Todėl, norint apskaičiuoti elektromagnetinį momentą, dažnai naudojama formulė

Ryžiai. 3.5. Pasipriešinimo įtaka r" 2 apie asinchroninio variklio mechanines charakteristikas
Asinchroninio variklio eksploatacines savybes lemia jo eksploatacinės charakteristikos: sukimosi greičio priklausomybė n 2, veleno sukimo momentas M 2, efektyvumo ir galios koeficientas cosφ 1 nuo variklio naudingosios apkrovos R 2 .
Skaičiuojant asinchroninių variklių našumo nustatymo parametrus, naudojamas grafinis metodas, pagrįstas skritulinės diagramos konstravimu, arba analitinis metodas.
Bet kurio našumo skaičiavimo metodo atlikimo pagrindas yra atvirosios grandinės ir trumpojo jungimo bandymų rezultatai. Jei variklis yra suprojektuotas, šie duomenys gaunami jį apskaičiuojant.
Skaičiuojant rezistorių varžą r dob naudojamas statoriaus arba fazinio rotoriaus grandinėse apriboti paleidimo srovė arba greičio valdymą, naudokite principą: šiam konkrečiam asinchroniniam varikliui slydimas s proporcingas šio variklio rotoriaus grandinės aktyviajai varžai. Atsižvelgiant į tai, lygybė
(r 2 + r ext) /s= r2/s nom,
kur r2- paties rotoriaus apvijos aktyvioji varža darbinėje temperatūroje; s- paslysti, kai į rotoriaus grandinę su varža įkišamas rezistorius r ext.
Iš šios išraiškos gauname formulę papildomo rezistoriaus g aktyviajai varžai apskaičiuoti iki 6, reikalingos tam tikram padidintam slydimui gauti. s esant nurodytai (vardinei) apkrovai:
r ext = r 2 (s/s nom - 1).
Yra du paleidimo reostatų skaičiavimo būdai: grafinis ir analitinis.
Grafinis metodas tikslesnis, bet reikia sukurti natūralią mechaninę charakteristiką ir variklio užvedimo schemą, kuri yra susijusi su dideliu grafinio darbo kiekiu.
Analitinis metodas paleidimo reostatų skaičiavimas yra paprastesnis, bet ne toks tikslus. Taip yra dėl to, kad metodas pagrįstas indukcinio variklio natūralios mechaninės charakteristikos darbinės dalies tiesumo prielaida. Bet kai slydimas yra arti kritinio, ši prielaida sukelia pastebimą paklaidą, kuri yra reikšmingesnė, tuo arčiau pradinis paleidimo momentas M 1 iki maksimalaus sukimo momento M m ah. Todėl analitinis skaičiavimo metodas taikomas tik pradinio paleidimo momento vertėms M 1 < 0.7 M m ah .
Rezistorių varža paleidimo reostato etapuose:
trečias r ext3 = r 2 (λ m - 1);
antra r ext2 = r pridėti 3 λ m;
Pirmas r ext1 = r pridėti 2 λ m,
kur r 2 - asinchroninio variklio rotoriaus fazinės apvijos aktyvioji varža,
kur E 2 ir aš 2nom - pasirinkto variklio dydžio katalogo duomenys.
Paleidimo reostato varža jo laipteliais:
pirmasis R PR1 = r ext1 + r ext2 + r ext3;
antrasis R PR2 = r ext2 + r ext3
trečiasis R PR2 = r ext3 .
Apriboti asinchroninių variklių paleidimo srovę su voverės narvelio rotorius naudokite specialias grandines jų įtraukimui su elementais, ribojančiais paleidimo srovę. Visi šie metodai yra pagrįsti statoriaus apvijai taikomos įtampos mažinimu. Plačiausiai naudojamos grandinės su rezistorių arba droselių įtraukimu į tiesinius statoriaus laidus (žr. 3.14 pav. b).Šių elementų varža, reikalinga tam tikram paleidimo srovės a sumažinimui, palyginti su jos natūralia verte, apskaičiuojama pagal formules:
aktyviosios varžos rezistoriams
R n = 
už smaugimą
X L= 
Variklio varža trumpojo jungimo režimu Z k, ohm,
Z k =U 1 /aš P
Čia Xį ir r k – šios varžos indukciniai ir aktyvieji komponentai
R k = Z k cosφ k ; x k =
Dirbtinio paleidimo momento sumažinimas įjungus R arba L bus
α m = α 2 i
3.1 lentelė
Taigi, jei nustatyta vertė α m, kuri nustato dirbtinio paleidimo momento M "n reikšmę, tada reikia apskaičiuoti atitinkamas reikšmes R n arba x L galite naudoti aukščiau pateiktas formules, pakeisdami jas vietoj α 2 i, α m reikšmė.
Elektrinė varža kataloguose pateiktos variklio apvijos dažniausiai atitinka +20 °C temperatūrą. Tačiau apskaičiuojant variklių charakteristikas ir parametrus, jų apvijų varža turi būti padidinta iki darbinės temperatūros. Pagal dabartinį standartą darbinė temperatūra imama priklausomai nuo atsparumo karščiui klasės elektros izoliacija taikomas variklyje: esant B karščiui atsparumo klasei, darbinė temperatūra yra 75 ° C, o su atsparumo karščiui klasėmis F ir H - 115 ° C. Apvijų varžų perskaičiavimas į darbinę temperatūrą atliekamas padauginus apvijos varžą esant 20 ° C temperatūrai, iš šildymo koeficiento k t:
r= r 20 tūkst t .
Šio koeficiento reikšmės paimamos atsižvelgiant į variklių paskirtį ir jų matmenis (sukimosi ašies aukštį) (3.1 lentelė).
SINCHRONINĖS MAŠINOS
PAGRINDINĖS SĄVOKOS
būdingas bruožas sinchroninės mašinos yra standus ryšys tarp rotoriaus greičio n 1 ir dažnis kintamoji srovė statoriaus apvijoje f 1:
n 1 = f 1 60/ R.
Kitaip tariant, sukasi statoriaus magnetinis laukas ir sinchroninės mašinos rotorius sinchroniškai, y. tokiu pat dažniu.
Pagal savo konstrukciją sinchroninės mašinos skirstomos į iškilusius polius ir neiškilusius polius. Sinchroninėse mašinose su stulpeliais rotorius turi ryškius polius, ant kurių yra lauko apvijų ritės, maitinamos nuolatinė srovė. Būdingas tokių mašinų bruožas yra magnetinės varžos skirtumas išilgai išilginės ašies (išilgai polių ašies) ir išilgai skersinės ašies (išilgai ašies, einančios tarppolinėje erdvėje). Magnetinis atsparumas statoriaus srautui išilgine ašimi dd daug mažesnė magnetinė varža statoriaus srautui išilgai skersinės ašies qq. Sinchroninėse mašinose, kuriose nėra išlenktų polių, magnetinės varžos išilginėje ir skersinėje ašyje yra vienodos, nes šių mašinų oro tarpas išilgai statoriaus perimetro yra vienodas.
Sinchroninės mašinos statoriaus konstrukcija iš esmės nesiskiria nuo asinchroninės mašinos statoriaus. Statoriaus apvijoje mašinos veikimo metu indukuojamas EML ir teka srovės, kurios sukuria magnetomotyvinę jėgą (MFF), kurios didžiausia vertė yra
F 1 =0,45m 1 aš 1 w 1k aps.1 / R
Šis MDS sukuria besisukantį magnetinį lauką ir oro tarpą δ mašina sukuria magnetinę indukciją, kurios pasiskirstymo grafikas kiekvieno polių padalijimo t ribose priklauso nuo rotoriaus konstrukcijos (4.1 pav.).
Išskirtinio poliaus sinchroninei mašinai galioja įtempių lygtis:
Ú 1 =Ė 0 + Ė 1d+ Ė 1q+ Ė σ1 – İ 1 r 1
kur Ė 0 - pagrindinis sinchroninės mašinos EML, proporcingas pagrindiniam sinchroninės mašinos magnetiniam srautui F 0 ; Ė 1 d - sinchroninės mašinos armatūros reakcijos EML išilginėje ašyje, proporcingas armatūros reakcijos MMF išilginėje ašyje F 1d; Ė σ1 - armatūros reakcija EMF išilgai skersinės ašies, proporcinga armatūros reakcijai MMF išilgai skersinės ašies F 1q; Ė σ1 - nuotėkio EML dėl nuotėkio magnetinio srauto F 0, šio EMF vertė yra proporcinga statoriaus apvijos nuotėkio indukcinei varžai X 1
Ė σ1 = jİ 1r
İ 1 r 1 - aktyvus įtampos kritimas statoriaus fazės apvijoje, paprastai į šią vertę nepaisoma sprendžiant problemas dėl mažos vertės.
Ryžiai. 4.1. Magnetinės indukcijos pasiskirstymo pagal skersinę ašį grafikai
numanomas polius ( a) ir aiškus polius ( b) sinchroninės mašinos:
1 - MDS tvarkaraštis; 2 - magnetinės indukcijos grafikas
Sinchroninei mašinai, kurioje nėra išsikišusių polių, įtempių lygtis turi tokią formą
Ú 1 =Ė 0 + Ė c- İ 1 r 1
Čia
Ė c= Ė 1 + Ė σ1
kur Ė 1 - Netiesioginio poliaus sinchroninės mašinos armatūros reakcijos emf. Nagrinėjamos įtempių lygtys atitinka vektorines įtempių diagramas. Šios diagramos turi būti sudarytos, kad būtų galima nustatyti pagrindinį mašinos emf E 0, arba statoriaus apvijos įtampa U 1. Reikia turėti omenyje, kad įtempių lygtys ir jas atitinkančios vektorines diagramas neatsižvelgiama į sinchroninės mašinos magnetinės grandinės magnetinį prisotinimą, kuris, kaip žinoma, turi įtakos indukcinių varžų vertei, todėl jos mažėja. Apskaityti šį prisotinimą yra sudėtinga užduotis, todėl, apskaičiuodami sinchroninių mašinų EML ir įtampas, jie paprastai naudoja praktinė schema EMF, kuriame atsižvelgiama į magnetinės sistemos prisotinimo būseną, kurią sukelia armatūros reakcija, kai sinchroninė mašina yra apkrauta. Konstruojant praktinę EML diagramą, armatūros reakcijos įmagnetinimo jėga nėra išskaidoma į išilginę ir skersinę dedamąsias, todėl šią diagramą galima naudoti tiek skaičiuojant išryškėjusio poliaus, tiek implicitinio poliaus mašinas.
Spręsdami problemas, susijusias su sinchroniniais generatoriais, prijungtais lygiagrečiai su tinklu, arba su sinchroniniais varikliais, jie naudoja kampinės charakteristikos sinchroninės mašinos, atspindinčios elektromagnetinio momento priklausomybę M nuo apkrovos kampo θ. Šiuo atveju reikia atsiminti, kad sinchroninėse mašinose su stulpeliais yra du taškai: pagrindinis M pagrindinis ir reaktyvus M p, o mašinose, kuriose nėra išlenktų polių - tik pagrindinis dalykas:
![]()
Apkrovos kampas θ nom atitinka vardinis sukimo momentas M nom. Maksimalus sinchroninės mašinos sukimo momentas lemia sinchroninės mašinos perkrovos gebą, kuri yra svarbi abiem sinchroniniai generatoriai veikiantys lygiagrečiai su tinklu, ir sinchroniniams varikliams. Sinchroninėse mašinose su neišlenktais poliais didžiausias sukimo momentas atitinka apkrovos kampą θ = 90°, o mašinose su išsikišusių polių θ kr< 90° и обычно составляет 60 - 80° в зависимости от соотношения основного и реактивного электромагнитных моментов этой машины.
Norėdami apskaičiuoti kritinį apkrovos kampą, kuris lemia sinchroninių staklių perkrovos gebą, galite naudoti išraišką.
Asinchroninio variklio sukimo momento dydžiui didelę įtaką turi fazių poslinkis tarp srovės I 2 ir e. d.s. E 2S rotorius.
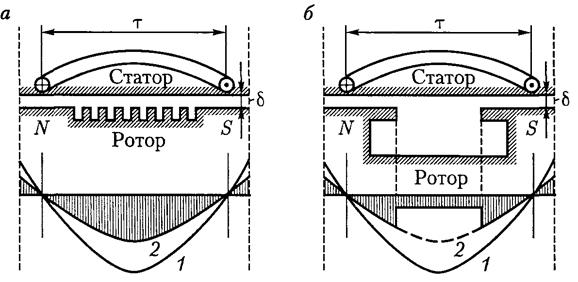
Apsvarstykite atvejį, kai rotoriaus apvijos induktyvumas yra mažas ir todėl fazės poslinkio galima nepaisyti (223 pav., a).
Besisukantį statoriaus magnetinį lauką čia pakeičia N ir S polių laukas, besisukantis, tarkime, pagal laikrodžio rodyklę. Naudojant taisyklę dešinė ranka, nustatykite kryptį e. d.s. ir srovės rotoriaus apvijoje. Rotoriaus srovės, sąveikaudamos su besisukančiu magnetiniu lauku, sukuria sukimo momentą. Jėgų, veikiančių srovės laidininkus, kryptys nustatomos kairiosios rankos taisykle. Kaip matyti iš brėžinio, rotorius, veikiamas jėgų, suksis ta pačia kryptimi kaip ir pats besisukantis laukas, tai yra pagal laikrodžio rodyklę.
Apsvarstykite antrąjį atvejį, kai rotoriaus apvijos induktyvumas yra didelis. Šiuo atveju fazės poslinkis tarp rotoriaus srovės I 2 ir e. d.s. rotorius E 2S taip pat bus didelis. Fig. 223, b, asinchroninio variklio statoriaus magnetinis laukas vis dar rodomas pagal laikrodžio rodyklę besisukančių polių N ir S pavidalu. E kryptis. d.s. lieka tokia pati kaip pav. 223, a, bet dėl srovės vėlavimo fazėje ašis magnetinis laukas rotorius nebesutaps su neutralia statoriaus lauko linija, o pasislinks tam tikru kampu prieš magnetinio lauko sukimąsi. Tai lems tai, kad kartu su sukimo momentu, nukreiptu viena kryptimi, kai kurie laidininkai sukurs priešingą sukimo momentą.
Iš to matyti, kad bendras variklio sukimo momentas fazės poslinkio tarp srovės ir el. d.s. rotorius yra mažesnis nei tuo atveju, kai I 2 ir E 2S yra fazėje. Galima įrodyti, kad indukcinio variklio sukimo momentą lemia tik aktyvioji rotoriaus srovės dedamoji, t.y. srovė I 2 cos, ir kad jį galima apskaičiuoti pagal formulę:

Ф m - statoriaus magnetinis srautas (ir taip pat maždaug lygus susidariusiam indukcinio variklio magnetiniam srautui);
Fazės kampas tarp e. d.s. ir apvijos fazės srovė
C yra pastovus koeficientas.
Po pakeitimo:
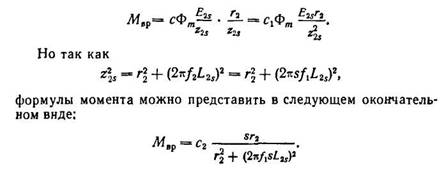
Iš paskutinės išraiškos matyti, kad asinchroninio variklio sukimo momentas priklauso nuo slydimo.
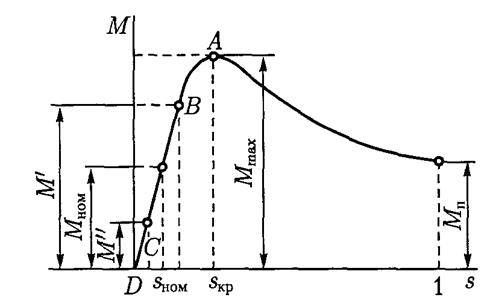
Fig. 224 parodyta variklio sukimo momento ir slydimo kreivė A. Iš kreivės matyti, kad paleidimo momentu, kai s=l ir n = 0, variklio sukimo momentas yra mažas. Tai paaiškinama tuo, kad paleidimo momentu srovės dažnis rotoriaus apvijoje yra didžiausias, o apvijos indukcinė varža didelė. Dėl to cos turi mažą vertę (nes
|
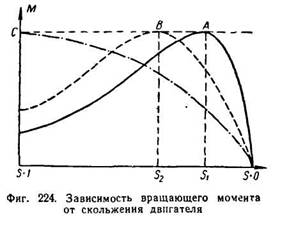
0,1-0,2 eilutė). Todėl, nors paleidimo srovė yra didelė, paleidimo momentas bus mažas.
Esant tam tikram slydimui S 1, variklio sukimo momentas bus didžiausias. Toliau mažėjant slydimui arba, kitaip tariant, toliau didėjant variklio sukimosi greičiui, jo sukimo momentas sparčiai mažės.
Svyruojant ir slystant s = 0, variklio sukimo momentas taip pat bus lygus nuliui.
Reikėtų pažymėti, kad asinchroniniame variklyje slydimas, lygus nuliui, praktiškai negali egzistuoti. Tai įmanoma tik tuo atveju, jei rotorius iš išorės tiekiamas sukimo momentu statoriaus lauko sukimosi kryptimi.
Pradinis sukimo momentas gali būti padidintas, jei paleidimo momentu fazės poslinkis tarp srovės ir el. d.s. rotorius. Iš formulės
matyti, kad jei, esant pastoviai indukcinei rotoriaus apvijos varžai, aktyvioji varža padidėja, tada pats kampas sumažės, o tai lems, kad padidės ir variklio sukimo momentas. Tai praktiškai naudojama variklio užvedimo momentui padidinti. Užvedimo metu į rotoriaus grandinę įvedamas aktyvus pasipriešinimas (paleidimo reostatas), kuris pašalinamas, kai tik variklis padidina greitį.
Padidinus paleidimo sukimo momentą, didžiausias variklio sukimo momentas gaunamas esant didesniam slydimui (224 pav. kreivės B taškas S 2). Padidinus aktyviąją rotoriaus grandinės varžą paleidimo metu, galima pasiekti, kad didžiausias sukimo momentas bus paleidimo momentu (s = 1 kreivė C).
Asinchroninio variklio sukimo momentas yra proporcingas įtampos kvadratui, todėl net ir nedidelį įtampos sumažėjimą lydi staigus sukimo momento sumažėjimas.
Galia P 1, tiekiama į indukcinio variklio statoriaus apviją, yra lygi:
![]()
čia m 1 yra fazių skaičius.
Variklio statorius turi tokius energijos nuostolius:
1) statoriaus apvijoje R es. =m 1 I 1 2 r 1;
2) statoriaus pliene ir histerezės bei sūkurinių srovių P C .
Rotoriui tiekiama galia yra besisukančio magnetinio lauko galia, dar vadinama elektromagnetine galia P eM .
Elektromagnetinė galia lygi skirtumui tarp varikliui tiekiamos galios ir nuostolių variklio statoriuje, t.y.
|

Skirtumas tarp Р eM ir rodo elektrinius nuostolius rotoriaus apvijoje Р eP, jei neatsižvelgsime į nuostolius rotoriaus pliene dėl jų nereikšmingumo (rotoriaus pakartotinio įmagnetinimo dažnis paprastai yra labai mažas):

Todėl nuostoliai rotoriaus apvijoje yra proporcingi rotoriaus slydimui.
Jei nuo mechaninė galia sukurtus rotoriaus, atimkite mechaninius nuostolius R mx dėl trinties rotoriaus guoliuose, trinties į orą ir kt., taip pat papildomus nuostolius R D, atsirandančius veikiant apkrovai ir dėl rotoriaus klaidžiojančių laukų bei nuostolius, kuriuos sukelia: magnetinio lauko pulsacijos. statoriaus dantyse ir rotoriuje, tada variklio velenui bus naudinga galia, kurią žymime P 2 .
Indukcinio variklio efektyvumą galima nustatyti pagal formulę:

Iš paskutinės išraiškos matyti, kad asinchroninio variklio sukimosi momentas yra proporcingas besisukančio magnetinio srauto, rotoriaus srovės ir kampo tarp e kosinuso didumo sandaugai. d.s. rotorius ir jo srovė,

Iš asinchroninio variklio ekvivalentinės grandinės gaunama sumažintos rotoriaus srovės vertė, kurią pateikiame be įrodymo.