Elektrisko piedziņu griešanās frekvences regulēšana ir viens no svarīgākajiem mūsdienu elektrotehnikas uzdevumiem. Racionālu regulēšanas metožu izstrāde un pielietošana var palielināt mehānismu produktivitāti, uzlabot produktu kvalitāti, vienkāršot piedziņas mehānisko daļu, samazināt enerģijas patēriņu utt.
Ģeneratora izejas frekvence ir viens no svarīgākajiem parametriem, kas nosaka ģeneratora reitingu. Ģeneratora elektriskā izeja ir jāuztur fiksētā frekvencē 50 Hz vai 60 Hz, lai tā atbilstu standarta izejas signālam elektrotīkls vai jūsu instrumentu frekvences reakcija. Varat arī saskarties ar dažādiem izolētiem viena tīkla apgabaliem, kas darbojas dažādās frekvencēs. Pēc tam kļūst nepieciešams mainīt ģeneratora izejas frekvenci atbilstoši darbināmo ierīču jaudai vai tīklam, kuram ir pievienots jūsu ģenerators.
Elektromotora apgriezienu dabiskās izmaiņas atbilstoši tā mehāniskajām īpašībām, mainoties slodzei uz piedziņas vārpstu, nevajadzētu jaukt ar ātruma regulēšanu. Regulēšana ir elektriskās piedziņas griešanās ātruma piespiedu maiņa atkarībā no piedziņas mehānisma prasībām.
Motora apgriezienu skaita maiņa uz izejas frekvenci. Mūsdienu ģeneratori sastāv no dzinēja, kas tieši savienots ar ģeneratoru. maiņstrāva elektroenerģijas ražošanai. Viens no visizplatītākajiem veidiem, kā mainīt ģeneratora izejas frekvenci, ir mainīt dzinēja apgriezienu skaitu.
Abi faktori ir saistīti ar šādu formulu. Mazu vai dzīvojamo ģeneratoru gadījumā varat mainīt dzinēja apgriezienu skaita iestatījumus, veicot dažas izmaiņas ierīces vadības panelī. Veiciet tālāk norādītās darbības, lai mainītu oscilatora frekvenci no 60 Hz uz 50 Hz.
Jebkuru regulēšanas metodi raksturo šādi galvenie rādītāji:
regulēšanas diapazons - maksimālā ātruma attiecība pret minimālo, ko var iegūt piedziņā t.i. ;
regulēšanas vienmērīgums - stabilo ātrumu skaits, kas iegūts noteiktā regulēšanas diapazonā;
efektivitāte - ņemot vērā izmaksas, kas saistītas ar pašas vadības metodes izveidi, un papildu enerģijas zudumus, kas rodas piedziņā;
Ģeneratora kontrolleri uzrauga un kontrolē reāllaikā. Iebūvētās aizsardzības funkcijas automātiski izslēgs jūsu ģeneratoru pārmērīgu dzinēja apgriezienu vai ļoti zemas izejas frekvences gadījumā. Nākamais raksts: Kā darbojas ģeneratori. Frekvences pārveidotāji Ja izmantojat fiksēta ātruma ģeneratoru, ierīcei varat pievienot frekvences pārveidotāju. Frekvences pārveidotājs ir taisngrieža un invertora kombinācija. Taisngriezis izmanto ģeneratoru, lai izveidotu līdzstrāva.
piedziņas stabilitāte - rotācijas ātruma izmaiņas, mainoties griezes momentam uz motora vārpstas. Darba stabilitāti pilnībā nosaka mehānisko īpašību stingrība;
regulēšanas virziens norāda, ka ātrums mainās tikai uz leju vai tikai uz augšu no piedziņas galvenā ātruma, vai ir iespējama gan augšup, gan lejup regulēšana.
Visas saistītās sprieguma izmaiņas ir saistītas ar ierīces mērķi, kā arī ir atkarīgas no lietojuma, kuram frekvences pārveidotājs tiek izmantots. Tradicionāli frekvences pārveidotāji, piemēram, rotējošie pārveidotāji un motora ģeneratoru komplekti, ir izgatavoti no elektromehāniskām sastāvdaļām. Līdz ar cietvielu elektronikas parādīšanos tās tagad tiek veidotas kā pilnībā elektroniskas vienības.
Invertora iedarbības ekonomiskais pamatojums
Frekvences pārveidotājus izmanto arī aviācijas un kosmosa rūpniecībā, lai pārveidotu 50 Hz vai 60 Hz uz 400 Hz izvadi, ko izmanto zemes apraidei. spēka agregāts lidmašīna. Šīs sistēmas tiek izmantotas arī, lai kontrolētu ventilatoru un sūkņu ātrumu un citas mainīga griezes momenta slodzes, kas darbojas ar mainīgu ātrumu.
Asinhronā motora rotora ātrumu nosaka pēc formulas:
kur f ir maiņstrāvas frekvence; p ir statora tinumu polu pāru skaits; s - slīdēšana.
No iepriekš minētās formulas mēs varam secināt, ka rotācijas ātrums indukcijas motors var pielāgot, mainot vienu no trim vērtībām:
Mainīga ātruma elektroniskie ģeneratori Pastāv īpaša oscilatoru klase, kas pazīstama kā mainīga ātruma elektroniskie pārveidotāji, kuros, mainot motora ātrumu, tiek mainīts ģeneratora ātrums, lai automātiski radītu mainīgas frekvences izvadi. Pēc tam frekvences pārveidotāju izmanto, lai koriģētu ģeneratora izvadi, lai tā atbilstu vēlamajai izejas frekvencei 50 Hz vai 60 Hz. Šīs ierīces izmantošana novērš nepieciešamību pēc mainīga ātruma piedziņas un transformatora.
paslīd;
Statora magnētiskās plūsmas p polu pāru skaits;
Statora strāvas frekvences f.
Apsvērsim iespēju regulēt rotora ātrumu, mainot slīdēšanu. Slīdēšana ir daudzu dzinēja parametru funkcija:
s = f(R1, X1;R2; X2; U),
kur R 1 X 1 - statora ķēdes aktīvā un induktīvā pretestība,; R 2 , X 2 - tas pats, rotors;
Šīs tehnoloģijas trūkums ir tāds, ka elektroniskais komponents ir ne tikai dārgs, bet arī nav piemērots lietošanai skarbā vidē, kurā parasti darbojas ģenerators. Ir svarīgi atzīmēt, ka tie atšķiras no mainīga ātruma ģeneratoriem, kuriem ir nepārtraukti mainīga transmisija, kas ļauj mainīt dzinēja apgriezienu skaitu, bet saglabā nemainīgs ātrumsģenerators. Tas nemaina izejas frekvenci, bet ļauj ģeneratoram mainīt ģeneratora jaudu, lai tas atbilstu mainīgas slodzes prasībām.
Nākamajā attēlā parādīts asinhronā motora bloka līdzvērtīgs ķēdes modelis. Tas nozīmē, ka startēšanas brīdī slīdēšana ir vienāda ar vienu un plkst sinhronais darbs ar jaudas frekvenci - nulle. Varat parametrēt šo bloku, ņemot vērā iepriekšējās līdzvērtīgās ķēdes parametrus vai motora nominālus, ko bloks izmanto šo parametru iegūšanai.
U - motora barošanas spriegums.
No formulas var redzēt, ka, lai mainītu slīdēšanu, statora vai rotora tinumu ķēdēs var ievadīt papildu rezistorus vai induktivitātes vai samazināt motora barošanas spriegumu.
Sprieguma maiņa.
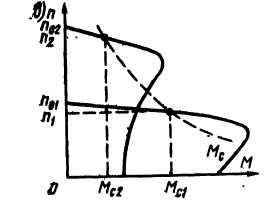
Ir zināms, ka asinhronā motora maksimālais griezes moments ir proporcionāls tīkla sprieguma kvadrātam un mehāniskie raksturlielumi pie dažādiem spriegumiem ir tādi, kādi parādīti 5.8. att., a. Šo raksturlielumu analīze kopā ar pacelšanas ierīces pretestības momenta Ms.g raksturlielumu parāda, ka ātruma kontrole ir iespējama ļoti šaurā diapazonā. Pie 0,6 U n sprieguma dzinējs neiedarbināsies, jo Mp<Мс.г, а при снижении напряжения ниже 0,6 UB работающий двигатель остановится.
Blokam ir divi papildu termiskie porti, viens katram tinumam, pēc noklusējuma paslēpts. Veicot šo darbību, bloka ikonā tiek parādīti termiskie porti un bloka dialoglodziņā tiek pievienotas cilnes Temperature Dependency un Thermal Port. Šīs cilnes ir aprakstītas vēlāk šajā palīdzības lapā.
Galvenie pieņēmumi un ierobežojumi
Izmantojiet termiskās pieslēgvietas, lai simulētu vara pretestības zuduma efektu, kas pārvērš elektrisko enerģiju siltumā. Termisko efektu modelēšana rotācijas un translācijas piedziņās. Modelis ir balstīts uz šādiem pieņēmumiem. Bloks nemodelē vienfāzes asinhronā motora palaišanas mehānismu. . Izvēlieties vienu no tālāk norādītajām bloku parametru noteikšanas metodēm.
Nedaudz vēlams vadīt motoru, kas rotē mehānismu ar ventilatora pretestības momentu Ms.v - vadības diapazons paplašinās.
Mainot parametrus R 1 , X 1 , X 2 .
Šo parametru palielinājumam ir gandrīz tāda pati ietekme uz motora mehāniskajām īpašībām kā sprieguma samazinājumam, un pretestības R 1 palielināšanās palielina arī enerģijas zudumus statora ķēdē.
Kā pieslēgt frekvences pārveidotāju
Pēc līdzvērtīgiem ķēdes parametriem — norādiet motora ekvivalentās ķēdes elektriskos parametrus. Pēc dzinēja vērtējuma. . Statora tinumu pretestība. Šī opcija ir redzama tikai tad, ja opcijai Modeļa parametrēšana atlasāt līdzvērtīgas shēmas opcijas.
Kā mainīt dzinēja apgriezienu skaitu?
Rotora pretestība attiecībā pret statoru. Statora tinuma induktivitāte. Rotora induktivitāte attiecībā pret statoru. Statora magnetizējošā induktivitāte. Tās vērtību ir grūti novērtēt pēc dzinēja parametriem, taču efekts parasti ir neliels. Mehāniskā jauda, ko nodrošina motors, darbojoties ar nominālo ātrumu. Šī opcija ir redzama tikai tad, ja opcijai Modeļa parametrēšana ir atlasīts Motors.
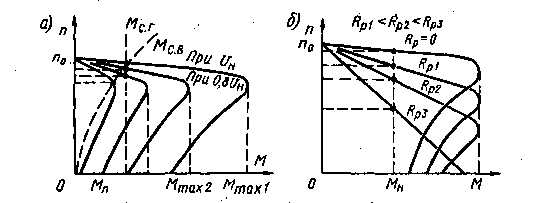
5.8. att. Asinhronā motora mehāniskie raksturlielumi mainot
rotora ķēdes spriegums un pretestība
50. gadu beigās zināmu sadalījumu ieguva tā sauktā droseles elektriskā piedziņa, kurā tika panākts pretestības pieaugums X 1, statora ķēdē iekļaujot magnētisko pastiprinātāju (piesātinājuma induktors). Galvenais šādu elektrisko piedziņu trūkums (arī mainoties spriegumam U) ir tas, ka slīdošā jauda rotorā pilnībā pārvēršas siltumā, palielinot motora pārkaršanu. Droseles piedziņās samazinās arī jaudas koeficients cosf.
Ātrums, ar kādu motors nodrošina noteiktu mehānisko jaudu. Tiešās līnijas spriegums, pie kura ir norādīti motora nominālie rādītāji. Noklusējuma vērtība ir 60 herci. Līnijas strāva, pie kuras motors nodrošina norādīto mehānisko jaudu.
Frekvences pārveidotāja atmaksāšanās
No dzinēja efektivitātes. . Motora ieejas jaudas procentuālā daļa, kas tiek piegādāta mehāniskajai slodzei, kad tas darbojas ar nominālo ātrumu. Leņķa kosinuss, kurā barošanas strāva atpaliek no barošanas sprieguma, kad darbojas ar nominālo mehānisko jaudu.
No iepriekš minētā izriet, ka parametru R 1 X 1 X 2 palielināšana vai U samazināšanās ne tikai ātruma kontroles dēļ, bet arī dažu citu iemeslu dēļ (piemēram, tīkla parametru ietekme) ļoti nevēlams asinhronajam motoram.
Rotora ķēdes aktīvās pretestības maiņa.
Vienīgais asinhronā motora parametrs, no kura nav atkarīgs maksimālais motora griezes moments, ir pretestība R 2. . Līdz ar to, rotora ķēdē ievadot papildu rezistorus, tiek saglabāta motora mehāniskā pārslodzes spēja un, kas ir ļoti svarīgi, enerģijas zudumi tiek atbrīvoti galvenokārt uz rezistoriem, t.i., ārpus motora.
Kā uzturēt frekvences pārveidotājus?
Izmērīta statora pretestība. Kopējais motora polu pāru skaits. Izvēlieties kādu no tālāk norādītajām dzinēja konfigurācijām. Zvaigznes konfigurācija — pievienojiet motora statora tinumus zvaigznei. . Spriegums starp līnijām, ko piegādā motors.
Rotora ātrums simulācijas sākumā. Pretestības temperatūras koeficienti. 1 x 2 līniju vektors, kas definē koeficientu α vienādojumā attiecībā uz temperatūras pretestību, kā aprakstīts izpildmehānismu bloku termiskajā modelī. Pirmais elements atbilst statoram, bet otrais - rotoram.
Šī metode ir piemērojama tikai motoriem ar fāzes rotoru un gredzeniem. Ir gandrīz neiespējami mainīt vāveres būra rotora pretestību. Mehāniskie raksturlielumi dažādām rotoru pretestībām parādīti 5.8. att., b.
Īsumā regulēšanas process ir šāds: M=Ms, n=const;  -
- -
- -
- -
- -
- -
- -
- .Ieraksts ir izskaidrots ar formulām (2-6).
.Ieraksts ir izskaidrots ar formulām (2-6).
Temperatūra, kurai ir noteikti motora parametri. Šī cilne tiek rādīta tikai blokiem ar atvērtiem termiskajiem portiem. Sadaļā Termiskie porti. 1 x 2 līniju vektors, kas nosaka statora un rotora tinumu termisko masu. Termiskā masa ir enerģija, kas nepieciešama temperatūras paaugstināšanai par vienu grādu.
1 x 2 līniju vektors, kas norāda statora un rotora termisko pieslēgvietu temperatūru simulācijas sākumā. Blokam ir šādi porti. Mehāniskais rotācijas ports. Turbīnas uzdevums ir pārveidot ūdens, tvaika vai vēja enerģiju mehāniskajā enerģijā, kas liks ģeneratoram griezties. Ģenerators pārvērš mehānisko enerģiju elektroenerģijā. Hidroelektrostacijās šo ģeneratora un turbīnas kombināciju sauc par ģeneratoru komplektu.
No regulēšanas diapazona, gluduma, efektivitātes viedokļa šī metode ir līdzīga līdzstrāvas motora ātruma regulēšanai, mainot armatūras ķēdes pretestību. To izmanto Andižānas un Povenets kuģu vējstieņa un stūres elektriskajās piedziņās.
Izmaiņas stabu pāru skaitā.
Asinhronie motori, kuros trīsfāzu statora tinums var radīt rotējošu magnētisko lauku ar atšķirīgu polu pāru skaitu,
Kustīgais ūdens liek turbīnai griezties
Šajā ģeneratora blokā ūdens izplūst cauri aizbīdnim un iekļūst ritenī. Tas pagriež turbīnas lāpstiņas un pēc tam velk uz turbīnas vārpstu, lai izietu caur apakšējo vilci. Mehāniskā enerģija, ko rada milzīgs spēks, kas iespiež ūdeni turbīnā, tiek pārnesta uz ģeneratoru, kas pēc tam pārvērš to elektroenerģijā.
Turbīnu darbināms ģenerators ražo maiņstrāvu
Ģenerators ir savienots ar turbīnas piedziņas vārpstu. Tam ir kustīga daļa - rotors un fiksētā daļa - stators. Rotora ārējā virsma ir pārklāta ar elektromagnētiem. Statora vai cilindra sienas iekšējā virsma sastāv no vara tinumiem. Rotoram griežoties statora iekšpusē, elektroni vara tinumos "vibrē". To kustība rada elektrisko strāvu, kas ir līdzīga elektromagnētiskās indukcijas radītajai, taču daudz lielākā mērogā.
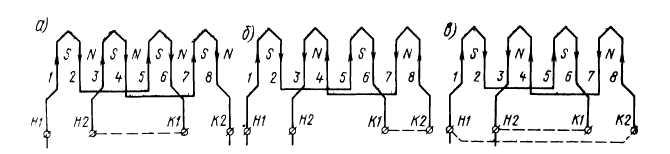
5.9.att. Diagramma, kas izskaidro polu komutācijas iegūšanas principu
sauc par polu pārslēdzamiem. Ir izstrādāti trīsfāzu tinumi, kurus var pārslēgt uz dažādu polu pāru skaitu attiecībās: 2:1, 5:2, 7:3, 3:1 utt.
Izskaidrosim polu komutācijas tinuma izveides principu, izmantojot astoņās rievās ieliktas vienfāzes tinuma piemēru. Tinums sastāv no diviem pustinumiem. Ja pustinumi ir savienoti virknē, tas ir, džemperis atradīsies starp spailēm K 1 un H 2 (5.9. att., a), tad šāds tinums izveidos četrus polu pārus (p = 4). Tinuma izveidoto stabu skaitu var atrast, norādot tajā esošās strāvas virzienu un piemērojot karkasa likumu, lai noteiktu spēka līniju virzienu ap spraugām.
Turbīnām ir nemainīgs rotācijas ātrums
Kaplan turbīnas uzstādīšana. Visām ģeneratoru iekārtām energosistēmā jābūt sinhronizētām. Citiem vārdiem sakot, ir svarīgi, lai tie uzturētu precīzu rotācijas ātrumu. Lai nodrošinātu pietiekamu strāvas kvalitāti. Ierīce, kas darbojas ar elektrību, ir paredzēta noteiktas frekvences maiņstrāvas izmantošanai. Šī frekvence ir atkarīga no ģeneratoragregāta griešanās ātruma, t.i. reižu skaits sekundē, kad rotora magnēti iet garām statora tinumiem. Šī frekvence ir izteikta ciklos sekundē jeb hercos, kas nosaukti vācu fiziķa Heinriha Herca vārdā, kurš pierādīja radioviļņu esamību.
Ja pustinumi ir savienoti viens pret otru, t.i. džemperis starp spailēm K 1 un K 2 (9. att., b), tad šāds tinums radīs divus stabu pārus (p \u003d 2). Ar atlasīto strāvas virzienu lauks starp slotiem 2 un 3, 4 un 5, 6 un 7, 8 un 1 viens otru atceļ.
Pustinumus var savienot aizmugures pret aizmuguri, t.i. džemperi starp spailēm H 1 un K 2, H 2 un K 1 (9. att., c), tad tinums radīs arī divus stabu pārus (p = 2).
Ziemeļamerikā standarta maiņstrāvas cikls ir 60 reizes sekundē, bet Eiropā tas ir 50 reizes sekundē. Tas nozīmē, ka pulkstenis, kas paredzēts darbam ar 60 Hz, būs lēnāks, ja tas tiks pievienots Eiropas kontaktligzdai. Lai nodrošinātu 60 Hz maiņstrāvu, tiem jāgriežas ar ātrumu 5 apgriezieni minūtē. Šeit ir formula, ko izmantoja inženieri.
Dzinēja iedarbināšanas metodes
Maikls Faradejs, britu fiziķis un ķīmiķis, atklāj indukcijas fenomenu. Zinātnieks vispirms radīja elektrisko strāvu, pārvietojot magnētu uz priekšu un atpakaļ metāla spolē. Faradeja atklājuma inovatīvie principi tiek ātri pieņemti un izmantoti, lai apmierinātu rūpniecības laikmeta ražošanas vajadzības. Pamatojoties uz šiem principiem, tika izveidots pirmais elektriskais ģenerators, mūsdienu spēka agregātu priekštecis. Faradeja eksperimenti izraisīja citu pētnieku pirmā elektromotora un pirmā transformatora izgudrošanu.
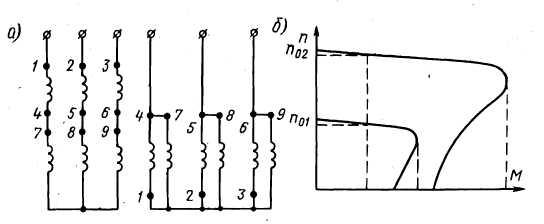
Tādējādi ir divi veidi, kā pārslēgt tinumu uz mazāku skaitu polu pāru proporcijā 2:1. Pirmā metode ir pārslēgšanās no pustinumu seriālā savienojuma uz antiseriālo savienojumu, otrā metode ir pārslēgšanās no seriālā savienojuma uz antiparalēlo savienojumu. Apsveriet katru metodi saistībā ar trīsfāzu motora tinumu.
Ar pirmo komutācijas metodi tinumam, kas savienots ar zvaigzni, uz vairoga jābūt 9 spailēm (5.10. att., a), un, ja tas ir savienots ar trīsstūri, 12 spailēm (5.10. att., b). Pēc pārslēgšanas tinumu savienojuma raksturs nemainās, tas ir, zvaigzne pārslēdzas uz zvaigzni, bet trīsstūris - uz trīsstūri.
Dzinēja jauda pirmajā pārslēgšanas metodē paliek nemainīga, tāpēc mainās nominālais un maksimālais motora griezes moments. Dzinēja un dažādu mehānismu mehānisko īpašību kopīgs apsvērums (5.10. att., c) parāda, ka šī pārslēgšanas metode ir vispiemērotākā metāla griešanas darbgaldu ātruma regulēšanai.
Jūras celšanas ierīču elektriskajās piedziņās plaši tiek izmantoti vējstieņi, kabeļi, trīs ātrumu asinhronie motori ar trim atsevišķiem tinumiem uz statora dažādam polu pāru skaitam.
Otrajā komutācijas metodē ar zvaigzni savienotajam tinumam ir tikai 6 vadi (5.11. att., a). Pēc pārslēgšanas tiek iegūts dubultās zvaigznes tinuma savienojums. Motora jauda šajā gadījumā tiek dubultota, un nominālais griezes moments paliek nemainīgs.
Dzinēja un dažādu mehānismu mehānisko īpašību kopīgs apsvērums (5.11. att., b) parāda, ka kravas pacelšanas ierīču rotācijas ātruma regulēšanai ir ieteicams izmantot otro pārslēgšanas metodi.
Ja tinums ir savienots trīsstūrī, tad pēc pārslēgšanas pēc otrās metodes tiek iegūts dubultās zvaigznes savienojums. Dzinēja jauda palielināta par 15%.
Tiek apskatīti vienkāršākie tinumu pārslēgšanas veidi, kas dod divus ātruma pakāpienus. Ar sarežģītāku trīsfāzu tinuma pārslēgšanu jūs varat iegūt trīs vai pat četrus ātruma soļus ar lielāko daļu. dažādas stabu attiecības. Piemēram, MAP sērijas sadzīves motoriem ar vienu trīsfāzu tinumu ir trīs ātrumi (MAP-42/8-4-2, jauda 0,8/1, 8/2 kW, rotācijas ātrums 700/1400/2800 apgr./min.) ( MAP-52/8-6-4-2, jauda 1,2/2,5/3/4 kW, griešanās ātrums 460/700/920/1440 apgr./min.). Vairāk nekā četri ātrumi praksē nenotiek, jo tinums un tā pārslēgšana ir daudz sarežģītāka. Dzinējam MAP-52/8-6-4-2 spaiļu panelī ir 22 pievadi.
Jūras celšanas ierīču elektriskajās piedziņās plaši tiek izmantoti vējstieņi, kabeļi, trīs ātrumu asinhronie motori ar trim atsevišķiem tinumiem uz statora dažādam polu pāru skaitam. Rotācijas biežums
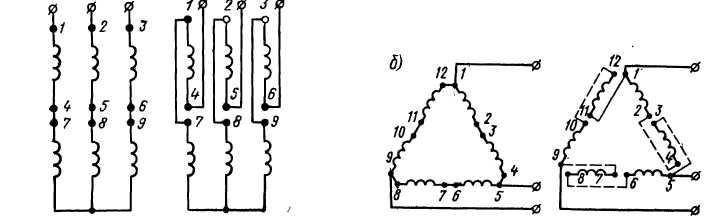
Att.5.10. Pirmais veids, kā pārslēgt trīsfāzu tinumu, kas savienots ar zvaigzni,
un trīsstūris, un attiecīgie asinsspiediena mehāniskie raksturlielumi.
tiek regulēts, ieslēdzot vienu vai otru tinumu, bet paši tinumi nepārslēdzas.
Iekšzemes rūpniecība ražo MAP sērijas daudzpakāpju asinhronos motorus kuģu elektriskajām piedziņām, kuru ātruma regulēšanas diapazons ir 6: 1 vai 7: 1. Pirmajā ātruma tinumā parasti ir 26 vai 28 stabi.
Polu pāru komutācijas regulēšana ir ļoti ekonomiska, jo rotors griežas ar vienmērīgu frekvenci ar slīdēšanu nominālajā diapazonā un motora ķēdē nav iekļauti papildu rezistori. Šīs metodes nopietns trūkums ir gradācija un ierobežotais ātrumu skaits.
5.11.att. Otrs veids, kā pārslēgt trīsfāzu tinumu, kas savienots ar zvaigzni, un
asinhronā motora atbilstošās mehāniskās īpašības
Rotācijas ātruma regulēšana, mainot barošanas tīkla strāvas frekvenci (frekvences regulēšana).
Šīs vadības metodes pamatā ir sinhronā ātruma n 0 maiņa, kas ir proporcionāla strāvas frekvencei statora tinumā. Šim regulējumam ir nepieciešams mainīgas frekvences barošanas avots f. Kā avots tiek izmantoti elektromagnētiskie un pusvadītāju frekvences pārveidotāji. Tomēr jāpatur prātā, ka vienlaikus ar barošanas sprieguma f frekvences maiņu mainīsies arī motora maksimālais elektromagnētiskais griezes moments. Tāpēc, lai uzturētu motora pārslodzes jaudu, jaudas koeficientu un efektivitāti vajadzīgajā līmenī, vienlaikus ar frekvences f maiņu jāmaina tīkla spriegums U, lai to attiecība paliktu nemainīga:
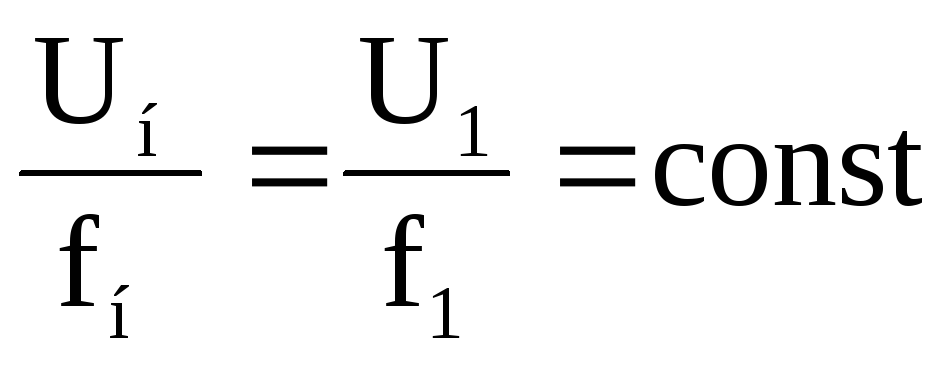
 ;
;
Frekvences kontrole ļauj vienmērīgi mainīt dzinēju apgriezienus plašā diapazonā (līdz 12:1).
Ātruma kontrole, mainot pašreizējo frekvenci, ir racionālākais un ekonomiskākais veids. Tās galvenās priekšrocības:
Tiek izmantots parasts vāveres būra motors;
Regulēšana motora zudumu ziņā ir ekonomiska;
Tiek panākts liels regulēšanas diapazons un vienmērīgums;
Tiek saglabāta mehānisko īpašību stingrība un līdz ar to arī piedziņas stabilitāte;
Reģeneratīvo bremzēšanu var veikt gandrīz līdz pilnīgai apstāšanās brīdim.
Tajā pašā laikā ir zināms, ka kuģa spēkstacijas pašreizējā frekvence tiek uzturēta nemainīga un ir nepieciešams atsevišķs frekvences pārveidotājs, lai kontrolētu dzinēja apgriezienus.
Mūsdienīga frekvences vadīta elektriskā piedziņa sastāv no asinhronā jeb sinhronā elektromotora un frekvences pārveidotāja (5.12. att.).
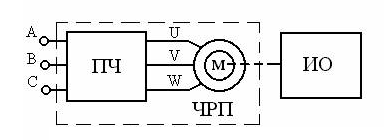
5.12. att. Mainīgas frekvences piedziņa
Frekvences pārveidotājs darbina elektromotoru un ir elektroniska statiska ierīce. Pārveidotāja izejā tiek ģenerēts elektriskais spriegums ar mainīgu amplitūdu un frekvenci. Nosaukums "mainīgas frekvences elektriskā piedziņa" ir saistīts ar faktu, ka motora ātruma regulēšana tiek veikta, mainot barošanas sprieguma frekvenci, kas tiek piegādāta motoram no frekvences pārveidotāja.
Pēdējo gadu laikā uz kuģiem ir plaši un veiksmīgi ieviesta frekvences vadīta elektropiedziņa gan dažādu tehnoloģisku problēmu risināšanai, gan elektropiedziņas sistēmās. Tas galvenokārt ir saistīts ar frekvenču pārveidotāju izstrādi un izveidi, pamatojoties uz principiāli jaunu elementu bāzi, galvenokārt uz IGBT izolētu vārtu bipolāriem tranzistoriem.
Sinhronā elektromotorā rotora ātrums līdzsvara stāvoklī ir vienāds ar statora magnētiskā lauka ātrumu.
Asinhronajā elektromotorā rotora ātrums līdzsvara stāvoklī atšķiras no ātruma ar slīdēšanas lielumu.
Magnētiskā lauka rotācijas biežums ir atkarīgs no barošanas sprieguma frekvences. Kad elektromotora statora tinumu piegādā ar trīsfāzu spriegumu ar frekvenci, tiek izveidots rotējošs magnētiskais lauks. Šī lauka rotācijas ātrumu nosaka pēc labi zināmās formulas
kur ir statora polu pāru skaits.
Pāreju no lauka rotācijas ātruma, ko mēra radiānos, uz griešanās frekvenci, kas izteikta apgriezienos minūtē, veic saskaņā ar šādu formulu
kur 60 ir kategorijas konversijas koeficients.
Aizvietojot lauka rotācijas ātrumu šajā vienādojumā, mēs iegūstam to
Tādējādi sinhrono un asinhrono motoru rotora ātrums ir atkarīgs no barošanas sprieguma frekvences.
Frekvences regulēšanas metode ir balstīta uz šo atkarību.
Mainot frekvenci ar pārveidotāju pie motora ieejas mēs regulējam rotora ātrumu.
Visizplatītākajā frekvences vadītajā piedziņā, kuras pamatā ir asinhronie vāveres dzinēji, tiek izmantota skalārā un vektora frekvences vadība.
Ar skalāro vadību saskaņā ar noteiktu likumu tie maina motoram pievadītā sprieguma amplitūdu un frekvenci. Barošanas sprieguma frekvences maiņa izraisa novirzi no aprēķinātajām motora maksimālā un starta griezes momenta vērtībām, efektivitātes, jaudas koeficienta. Tāpēc, lai saglabātu nepieciešamos dzinēja darbības raksturlielumus, vienlaikus ir jāmaina sprieguma amplitūda ar frekvences izmaiņām.
Esošajos frekvences pārveidotājos ar skalāro vadību motora maksimālā griezes momenta attiecība pret pretestības momentu uz vārpstas visbiežāk tiek uzturēta nemainīga. Tas ir, mainoties frekvencei, sprieguma amplitūda mainās tā, ka maksimālā motora griezes momenta attiecība pret pašreizējo slodzes griezes momentu paliek nemainīga. Šo attiecību sauc par motora pārslodzes jaudu.
Ar pastāvīgu pārslodzes jaudu, nominālās jaudas koeficientu un efektivitāti dzinējs visā ātruma kontroles diapazonā praktiski nemainās.
Dzinēja radīto maksimālo griezes momentu nosaka šāda attiecība
kur ir nemainīgs koeficients.
Tāpēc barošanas sprieguma atkarību no frekvences nosaka elektromotora vārpstas slodzes raksturs.
Pastāvīgam slodzes griezes momentam tiek saglabāta attiecība U/f = const, un faktiski maksimālais motora griezes moments ir nemainīgs. Barošanas sprieguma atkarības no frekvences raksturs gadījumam ar nemainīgu slodzes griezes momentu ir parādīts attēlā. 5.13(a). Taisnas līnijas slīpuma leņķis grafikā ir atkarīgs no pretestības momenta vērtībām un motora maksimālā griezes momenta.
Tajā pašā laikā zemās frekvencēs, sākot no noteiktas frekvences vērtības, maksimālais motora griezes moments sāk kristies. Lai to kompensētu un palielinātu palaišanas griezes momentu, tiek izmantots barošanas sprieguma līmeņa paaugstinājums.
Ventilatora slodzes gadījumā tiek realizēta atkarība U/f 2 = const. Barošanas sprieguma atkarības no frekvences raksturs šajā gadījumā ir parādīts 5.13 (b) attēlā.
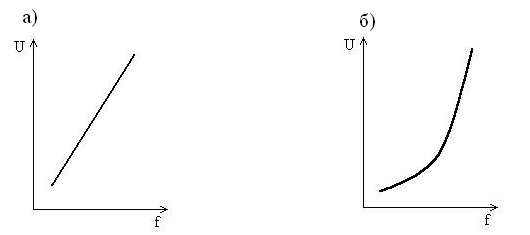
5.13. att. Barošanas sprieguma atkarības raksturs no frekvences gadījumam:
a) ar nemainīgu slodzes momentu
b) ar ventilatora slodzes griezes momentu
Regulējot zemo frekvenču reģionā, samazinās arī maksimālais griezes moments, taču šāda veida slodzei tas nav kritiski.
Izmantojot maksimālā griezes momenta atkarību no sprieguma un frekvences, ir iespējams attēlot U pret f jebkura veida slodzei.
Svarīga skalārās metodes priekšrocība ir iespēja vienlaicīgi vadīt elektromotoru grupu.
Skalārā kontrole ir pietiekama lielākajai daļai mainīgas frekvences piedziņas praktisko lietojumu ar motora ātruma regulēšanas diapazonu līdz 1:40.
vektora kontroleļauj ievērojami palielināt vadības diapazonu, vadības precizitāti, palielināt elektriskās piedziņas ātrumu. Šī metode nodrošina tiešu motora griezes momenta kontroli.
Griezes momentu nosaka statora strāva, kas rada aizraujošu magnētisko lauku. Izmantojot tiešu griezes momenta vadību, papildus statora strāvas amplitūdai un fāzei ir jāmaina, tas ir, strāvas vektors. Tas ir iemesls terminam "vektoru kontrole".
Lai kontrolētu strāvas vektoru un līdz ar to statora magnētiskās plūsmas stāvokli attiecībā pret rotējošo rotoru, jebkurā laikā ir jāzina precīza rotora pozīcija. Problēma tiek atrisināta vai nu ar attālināta rotora pozīcijas sensora palīdzību, vai arī nosakot rotora stāvokli, aprēķinot citus dzinēja parametrus. Kā šie parametri tiek izmantoti statora tinumu strāvas un spriegumi.
Lētāk ir VFD ar vektora vadību bez ātruma atgriezeniskās saites sensora, bet vektorvadība prasa lielu daudzumu un lielu aprēķinu ātrumu no frekvences pārveidotāja.
Turklāt, lai tieši kontrolētu griezes momentu pie zemiem, tuvu nullei griešanās ātrumiem, frekvences vadītas elektriskās piedziņas darbība bez ātruma atgriezeniskās saites nav iespējama.
Vektorvadība ar ātruma atgriezeniskās saites sensoru nodrošina vadības diapazonu līdz 1:1000 un lielāku, ātruma regulēšanas precizitāte - procenta simtdaļas, griezes momenta precizitāte - daži procenti.
Frekvences pārveidotājs ir ierīce, kas paredzēta, lai vienas frekvences maiņstrāvu (spriegumu) pārveidotu par citas frekvences maiņstrāvu (spriegumu).
Mūsdienu pārveidotāju izejas frekvence var atšķirties plašā diapazonā un būt gan augstāka, gan zemāka par tīkla frekvenci.
Jebkura frekvences pārveidotāja ķēde sastāv no jaudas un vadības daļām. Pārveidotāju jaudas daļa parasti tiek izgatavota uz tiristoriem vai tranzistoriem, kas darbojas elektroniskā slēdža režīmā. Vadības daļa tiek izpildīta uz digitālajiem mikroprocesoriem un nodrošina jaudas elektronisko atslēgu vadību, kā arī lielu skaitu palīguzdevumu risināšanu (kontrole, diagnostika, aizsardzība).
Frekvences pārveidotājus, ko izmanto vadāmajās elektriskajās piedziņās, atkarībā no spēka agregāta struktūras un darbības principa iedala divās klasēs:
1. Frekvences pārveidotāji ar izteiktu starpposmu līdzstrāvas saiti.
2. Frekvences pārveidotāji ar tiešu pieslēgumu (bez starpposma līdzstrāvas posma).
Katrai no esošajām pārveidotāju klasēm ir savas priekšrocības un trūkumi, kas nosaka katras no tām racionālas pielietošanas jomu.
Pārveidotājiem ar tiešu pieslēgumu (5.14. att.) barošanas daļa ir vadāms taisngriezis un tiek izgatavots uz nebloķējamiem tiristoriem. Vadības sistēma pēc kārtas atbloķē tiristoru grupas un savieno motora statora tinumus ar elektrotīklu.
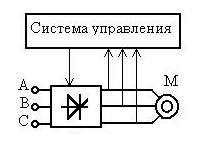
Rīsi. 5.14 Frekvences pārveidotājs ar tiešu savienojumu
Tādējādi pārveidotāja izejas spriegums veidojas no ieejas sprieguma sinusoīdu "nogrieztajām" sekcijām. 5.15. attēlā parādīts izejas sprieguma ģenerēšanas piemērs vienai no slodzes fāzēm.
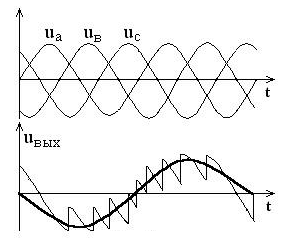
5.15. att. Izejas sprieguma veidošanās vienai no slodzes fāzēm
Pārveidotāja ieejā darbojas trīsfāzu sinusoidālais spriegums u a, u v, u s. Izejas spriegumam u out ir nesinusoidāla "zāģa zoba" forma, ko nosacīti var tuvināt ar sinusoīdu (biezu līniju). No attēla redzams, ka izejas sprieguma frekvence nevar būt vienāda vai lielāka par barošanas tīkla frekvenci. Tas ir diapazonā no 0 līdz 30 Hz. Rezultātā neliels motora apgriezienu kontroles diapazons (ne vairāk kā 1:10). Šis ierobežojums neļauj izmantot šādus pārveidotājus mūsdienu frekvences vadāmās piedziņās ar plašu tehnoloģisko parametru kontroles klāstu.
Nebloķējamo tiristoru izmantošanai ir nepieciešamas salīdzinoši sarežģītas vadības sistēmas, kas palielina pārveidotāja izmaksas.
“Nogrieztais” sinusoidālais vilnis pie pārveidotāja izejas ir augstāku harmoniku avots, kas rada papildu zudumus elektromotorā, elektromašīnas pārkaršanu, griezes momenta samazināšanos un ļoti spēcīgus traucējumus barošanas tīklā. Kompensācijas ierīču izmantošana palielina izmaksas, svaru, izmērus un samazina efektivitāti. sistēmas kopumā.
Kopā ar uzskaitītajiem tieši savienoto pārveidotāju trūkumiem tiem ir noteiktas priekšrocības. Tie ietver:
Praktiski augstākā efektivitāte salīdzinājumā ar citiem pārveidotājiem (98,5% un vairāk),
Spēja strādāt ar augstiem spriegumiem un strāvām, kas ļauj tos izmantot jaudīgos augstsprieguma piedziņās,
Relatīvais lētums, neskatoties uz absolūto izmaksu pieaugumu vadības ķēžu un papildu aprīkojuma dēļ.
Līdzīgas pārveidotāju shēmas tiek izmantotas vecajos piedziņās, un jauni dizaini praktiski nav izstrādāti.
Mūsdienu mainīgās frekvences piedziņās visplašāk izmantotie ir pārveidotāji ar izteiktu līdzstrāvas saiti (5.16. att.).
Šīs klases pārveidotājos tiek izmantota dubultā elektriskās enerģijas pārveidošana: ieejas sinusoidālais spriegums ar nemainīgu amplitūdu un frekvenci tiek iztaisnots taisngriežā (V), filtrēts ar filtru (F), izlīdzināts un pēc tam atkārtoti pārveidots ar invertoru (I). mainīgas frekvences un amplitūdas maiņspriegumā. Divkārša enerģijas pārveidošana noved pie efektivitātes samazināšanās. kā arī svara un izmēra rādītāju pasliktināšanās attiecībā pret pārveidotājiem ar tiešu savienojumu.
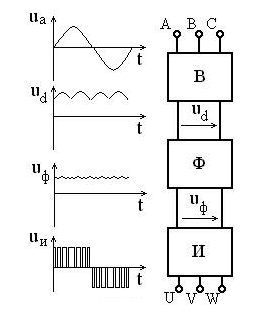
Attēls 5.16 Frekvences pārveidotājs ar līdzstrāvas saiti
Lai izveidotu sinusoidālu maiņspriegumu, tiek izmantoti autonomie sprieguma invertori un autonomie strāvas invertori.
Kā elektroniskie slēdži invertoros tiek izmantoti slēdzamie tiristori GTO un to uzlabotās modifikācijas GCT, IGCT, SGCT un izolēto vārtu bipolārie tranzistori IGBT.
Tiristoru frekvences pārveidotāju galvenā priekšrocība, tāpat kā tiešā savienojuma ķēdē, ir spēja strādāt ar lielu strāvu un spriegumu, vienlaikus izturot nepārtrauktu slodzi un impulsu efektus.
Viņiem ir augstāka efektivitāte (līdz 98%) salīdzinājumā ar pārveidotājiem uz IGBT tranzistoriem (95 - 98%).
Uz tiristoriem balstīti frekvences pārveidotāji pašlaik ieņem dominējošu stāvokli augstsprieguma piedziņā jaudas diapazonā no simtiem kilovatu līdz desmitiem megavatu ar izejas spriegumu 3-10 kV un augstāku. Tomēr to cena par izejas jaudas kW ir augstākā augstsprieguma pārveidotāju klasē.
Vēl nesen frekvences pārveidotāji uz GTO bija galvenā zemsprieguma mainīgās frekvences piedziņas daļa. Bet līdz ar IGBT tranzistoru parādīšanos notika “dabiskā atlase”, un mūsdienās uz tiem balstītie pārveidotāji ir vispāratzīti līderi zemsprieguma mainīgas frekvences piedziņas jomā.
Tiristors ir daļēji vadāma ierīce: lai to ieslēgtu, pietiek ar īsu impulsu uz vadības izeju, bet, lai to izslēgtu, tam vai nu jāpieliek reversais spriegums vai jāsamazina pārslēgtā strāva līdz nullei. Tam ir nepieciešama sarežģīta un apgrūtinoša tiristoru frekvences pārveidotāja vadības sistēma.
Izolētie vārtu bipolārie tranzistori IGBT atšķiras no tiristoriem ar pilnu vadāmību, vienkāršu mazjaudas vadības sistēmu, visaugstāko darba frekvenci
Rezultātā uz IGBT balstīti frekvences pārveidotāji ļauj paplašināt motora ātruma regulēšanas diapazonu un palielināt piedziņas ātrumu kopumā.
Asinhronai vektora vadītai piedziņai IGBT pārveidotāji ļauj darboties ar mazu ātrumu bez atgriezeniskās saites sensora.
IGBT izmantošana ar augstāku pārslēgšanas frekvenci kopā ar mikroprocesora vadības sistēmu frekvences pārveidotājos samazina tiristoru pārveidotājiem raksturīgo augstāko harmoniku līmeni. Tā rezultātā ir mazāki papildu zudumi elektromotora tinumos un magnētiskajā ķēdē, samazinās elektriskās mašīnas sildīšana, samazinās griezes momenta pulsācijas un tiek izslēgta tā sauktā rotora “staigāšana”. zemfrekvences reģionā. Tiek samazināti zudumi transformatoros, kondensatoru bankās, palielināts to kalpošanas laiks un vadu izolācija, samazināts aizsargierīču viltus trauksmes un indukcijas mērinstrumentu kļūdu skaits.
Pārveidotāji, kuru pamatā ir IGBT tranzistori, salīdzinot ar tiristoru pārveidotājiem ar vienādu izejas jaudu, ir mazāki pēc izmēra, svara, palielināta uzticamība elektronisko slēdžu modulārās konstrukcijas dēļ, labāka siltuma noņemšana no moduļa virsmas un mazāk konstrukcijas elementu.
Tie nodrošina pilnīgāku aizsardzību pret pārsprieguma strāvu un pārspriegumu, kas ievērojami samazina atteices un piedziņas bojājumu iespējamību.
Šobrīd zemsprieguma IGBT pārveidotājiem ir augstāka cena par izejas jaudas vienību tranzistoru moduļu ražošanas relatīvās sarežģītības dēļ. Tomēr cenas / kvalitātes attiecības ziņā, pamatojoties uz uzskaitītajām priekšrocībām, tie nepārprotami pārspēj tiristoru pārveidotājus, turklāt pēdējo gadu laikā ir vērojams stabils IGBT moduļu cenu kritums.
Galvenais šķērslis to izmantošanai augstsprieguma tiešās frekvences pārveidošanas piedziņās un jaudās virs 1-2 MW pašlaik ir tehnoloģiskie ierobežojumi. Pārslēgšanas sprieguma un darba strāvas palielināšanās palielina tranzistora moduļa izmēru, kā arī prasa efektīvāku siltuma atdalīšanu no silīcija kristāla.
Jaunās bipolāro tranzistoru ražošanas tehnoloģijas ir vērstas uz šo ierobežojumu pārvarēšanu, un solījums izmantot IGBT ir ļoti augsts arī augstsprieguma piedziņās. Pašlaik IGBT tranzistori tiek izmantoti augstsprieguma pārveidotājos vairāku sērijveidā savienotu atsevišķu moduļu veidā.
Tipiska zemsprieguma IGBT frekvences pārveidotāja diagramma ir parādīta attēlā. 5.17 Attēla apakšā ir grafiki ar spriegumiem un strāvām pie katra pārveidotāja elementa izejas.
Barošanas tīkla maiņspriegums (u in) ar nemainīgu amplitūdu un frekvenci (U in = const, f in = const) tiek piegādāts vadāmam vai nekontrolējamam taisngriezim (1).
Filtru (2) izmanto, lai izlīdzinātu rektificētā sprieguma (u rect.) viļņus. Taisngriezis un kapacitatīvā filtrs (2) veido līdzstrāvas saiti.
No filtra izejas pastāvīgs spriegums u d tiek padots uz autonomā impulsa invertora (3) ieeju.
Mūsdienu zemsprieguma pārveidotāju autonomais invertors, kā minēts, ir balstīts uz jaudas bipolāriem tranzistoriem ar izolētu aizbīdni IGBT. Attiecīgajā attēlā kā visplašāk izmantotā parādīta frekvences pārveidotāja ķēde ar autonomu sprieguma invertoru.
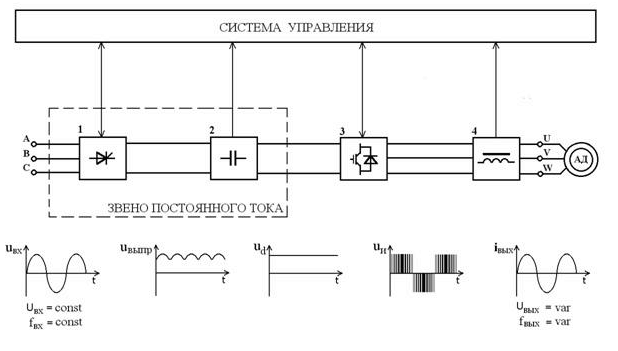
Rīsi. 5.17. Tipiska IGBT frekvences pārveidotāja ķēde
Invertors pārveido līdzstrāvas spriegumu u d trīsfāzu (vai vienfāzes) impulsa spriegumā u un mainīgu amplitūdu un frekvenci. Saskaņā ar vadības sistēmas signāliem katrs elektromotora tinums caur attiecīgajiem invertora jaudas tranzistoriem ir savienots ar līdzstrāvas posma pozitīvajiem un negatīvajiem poliem. Katra tinuma savienojuma ilgums impulsa atkārtošanās periodā tiek modulēts saskaņā ar sinusoidālo likumu. Lielākais impulsa platums tiek nodrošināts puscikla vidū un samazinās puscikla sākumā un beigās. Tādējādi vadības sistēma nodrošina motora tinumiem pievadītā sprieguma impulsa platuma modulāciju (PWM). Sprieguma amplitūdu un frekvenci nosaka modulējošās sinusoidālās funkcijas parametri.
Pie augstas PWM nesējfrekvences (2 ... 15 kHz) motora tinumi darbojas kā filtrs to augstās induktivitātes dēļ. Tāpēc tajās plūst gandrīz sinusoidālas strāvas.
Pārveidotāju ķēdēs ar vadāmu taisngriezi (1) sprieguma amplitūdas izmaiņas u un to var panākt, regulējot pastāvīgā sprieguma lielumu u d , un frekvences maiņa ir invertora darbības režīms.
Ja nepieciešams, autonomā invertora izejā tiek uzstādīts filtrs (4), lai izlīdzinātu strāvas viļņus. (IGBT pārveidotāju shēmās zemā augstāko harmoniku līmeņa dēļ izejas spriegumā filtrs praktiski nav nepieciešams.)
Tādējādi frekvences pārveidotāja izejā veidojas trīsfāžu (vai vienfāzes) mainīgas frekvences un amplitūdas maiņspriegums (U out = var, f out = var).
Bieži vien ir jāsamazina dzinēja griešanās ātrums, kas mehānismā veic noteiktus uzdevumus. Elektromotora apgriezienu skaita samazināšanu var panākt ar standarta ražošanas vadības ķēžu palīdzību.
Maiņstrāvas motori bieži tiek izmantoti cilvēku darbībā, metālapstrādes mašīnās, transportēšanā, celtņu mehānismos un citās iekārtās. Motori pārveido maiņstrāvas padeves enerģiju vārpstas un agregātu rotācijā. Galvenokārt tiek izmantoti maiņstrāvas asinhronie motori.
Rotors, kā arī motora stators, sastāv no stieples spolēm, kas ieliktas serdenī, kas izgatavots no īpaša tērauda. Elektromotoru klasifikācija izriet no tinuma ieklāšanas metodes.
Serdenē tiek ievietots misiņa un vara stieņu tinums, gar malām ir uzstādīti gredzeni. Šādu stieples spoli sauc par vāveres būra (CS) rotoru. Mazajiem jaudas motoriem ir stieņi, kā arī diski, kas ir salieti kopā. Elektromotoriem ar lielu griezes momentu detaļas tiek izlietas atsevišķi un pēc tam metinātas. Statora tinumu var savienot divos veidos: trīsstūra, zvaigzne.
Fāzes rotors sastāv no 3 fāžu rotora tinuma, kas ar slīdgredzeniem un sukām savienots ar barošanas avotu. Tinumu savieno "zvaigzne".

Asinhronā motora apgriezienu skaita aprēķins
Visizplatītākais darbgaldu un celšanas ierīču motors ir vāveres motors, tāpēc tam ir jāizmanto aprēķina piemērs. Tīkla spriegums tiek piegādāts statora tinumam. Tinumi ir nobīdīti viens pret otru par 120 grādiem. Jaunais elektromagnētiskās indukcijas lauks ierosina elektrisko strāvu tinumā. Rotors sāk darboties EMC ietekmē.
Motora galvenā īpašība ir apgriezienu skaits minūtē. Aprēķināsim šo vērtību:
n = 60 f/p, apgr./min;
kur f ir tīkla frekvence, herci, p ir statora polu skaits (pa pāriem).
Uz motora korpusa ir datu plāksnīte. Ja tā nav, varat pats aprēķināt iekārtas vārpstas apgriezienu skaitu, izmantojot citus pieejamos datus. Aprēķins tiek veikts trīs veidos.
- Spolu skaita aprēķins, kas tiek salīdzināts ar dažādu spriegumu normām, izriet no tabulas:

- Darba ātruma aprēķins ar tinuma diametra pakāpi pēc formulas:
2 p \u003d Z 1 / y, kur 2p ir polu skaits, Z 1 ir statora spraugu skaits, y ir tinuma solis.
Mēs izvēlamies atbilstošo motora apgriezienu skaitu no tabulas:

- Mēs aprēķinām polu skaitu atbilstoši serdes parametriem, izmantojot formulu:
2p = 0,35 Z 1 b / h vai 2 p = 0,5 D i / h,
kur 2p ir stabu skaits, Z 1 ir rievu skaits, b ir zoba izmērs, cm, h ir muguras augstums, cm, D i ir zobu diametrs, cm.
Saskaņā ar aprēķinu un indukcijas rezultātiem seko tinuma apgriezienu skaits, un to salīdzina ar motora vērtībām saskaņā ar pasi.
Kā mainīt dzinēja apgriezienu skaitu?
Iekārtas mehānisma griezes momenta apgriezienus var mainīt dažādos veidos, piemēram, mehāniskās ātrumkārbas ar pārnesumu pārslēgšanu, sajūgi un citas ierīces. Bet tas ne vienmēr ir iespējams. Praksē tiek izmantotas 7 metodes, lai koriģētu mainīga ātruma piedziņas ātrumu. Visas metodes ir sadalītas divās galvenajās jomās.
- Magnētiskā lauka korekcija, ietekmējot strāvas frekvenci, samazinot vai palielinot polu pāru skaitu, sprieguma korekcija. Virziens ir raksturīgs motoriem ar squirrel-cage (KR) rotoru.
- Slīdēšana tiek koriģēta ar barošanas spriegumu, pievienojot rotora ķēdei vēl vienu rezistoru, izveidojot dubulto barošanu, izmantojot vārstu kaskādi. Šo virzienu izmanto rotoriem ar fāzēm.
- Chastotniki ir divi vadības veidi: skalārs, vektors. Ar skalāro vadību ierīces darbojas ar noteiktām izejas potenciāla starpības un frekvences vērtībām, tās darbojas primitīvās sadzīves tehnikas, piemēram, ventilatoros. Izmantojot vektora vadību, strāvas stiprums tiek iestatīts diezgan precīzi.
- Izvēloties ierīci, jaudas parametriem ir izšķiroša loma. Jaudas apjoms paplašina lietošanas jomu, vienkāršo apkopi.
- Izvēloties ierīci, tiek ņemts vērā tīkla darba sprieguma intervāls, kas samazina tās atteices risku pēkšņu potenciālu starpības izmaiņu dēļ. Ja spriegums ir pārāk augsts, tīkla kondensatori var eksplodēt.
- Biežums ir svarīgs faktors. Tās vērtību nosaka ražošanas prasības. Zemākā vērtība norāda uz iespēju izmantot ātrumu optimālā darbības režīmā. Lai iegūtu lielāku frekvences intervālu, tiek izmantoti frekvences pārveidotāji ar vektora vadību. Patiesībā bieži tiek izmantoti invertori ar frekvences intervālu no 10 līdz 10 Hz.
- Frekvences pārveidotājs, kuram ir daudz dažādu izeju un ieeju, ir ērti lietojams, taču tā izmaksas ir augstākas un iestatīšana ir grūtāka. Ir trīs veidu chastotnik savienotāji: analogie, diskrētie, digitālie. Apgrieztā tipa ievades komandu komunikācija tiek veikta, izmantojot analogos savienotājus. Digitālās spailes ievada signālus no digitālā tipa sensoriem.
- Izvēloties frekvences pārveidotāja modeli, ir nepieciešams novērtēt vadības kopni. Tās raksturlielums ir izvēlēts invertora ķēdei, kas nosaka spilventiņu skaitu. Labākā izvēle ir frekvences pārveidotājs ar savienotāju skaita rezervi turpmākai ierīces modernizācijai.
- Izvēloties priekšroku dod frekvences pārveidotājiem, kas spēj izturēt lielas pārslodzes (par 15% lielāku par motora jaudu). Lai nepieļautu kļūdu, pērkot frekvences pārveidotāju, izlasiet instrukcijas. Tas satur galvenos iekārtas darbības parametrus. Ja jums ir nepieciešama ierīce maksimālajām slodzēm, tad jums jāizvēlas frekvences pārveidotājs, kas uztur strāvu darbības maksimumā augstāku par 10% no nominālās vērtības.
Kā pieslēgt frekvences pārveidotāju
Ja kabelis savienošanai ar 220 V ir ar 1. fāzi, tiek piemērota "trijstūra" shēma. Nepievienojiet frekvences pārveidotāju, ja izejas strāva ir lielāka par 50% no nominālās vērtības.
Ja strāvas kabelis ir trīsfāzu 380 V, tad tiek izveidota “zvaigznes” ķēde. Lai atvieglotu strāvas pievienošanu, tiek nodrošināti kontakti un spailes ar burtu apzīmējumiem.
- Kontakti R, S, T ir paredzēti barošanas avota savienošanai fāzēs.
- Termināļi U , V , W kalpo kā motora savienojums. Lai mainītu, pietiek ar divu vadu savienojuma maiņu.
Ierīcei jābūt blokam ar spaili savienošanai ar zemi. Sīkāka informācija par savienojuma izveidi.
Kā uzturēt frekvences pārveidotājus?
Invertora ilgstošai darbībai ir jāuzrauga tā stāvoklis un jāatbilst prasībām:
- Notīriet putekļus no iekšējām daļām. Jūs varat izmantot kompresoru, lai noņemtu putekļus ar saspiestu gaisu. Putekļsūcējs nav piemērots šiem nolūkiem.
- Periodiski pārbaudiet mezglu stāvokli, nomainiet tos. Elektrolītisko kondensatoru kalpošanas laiks ir pieci gadi, drošinātāju savienojumi desmit gadi. Dzesēšanas ventilatori darbojas 3 gadus pirms nomaiņas. Vadu cilpas tiek izmantotas sešus gadus.
- Ir svarīgi kontrolēt līdzstrāvas kopnes spriegumu un mašīnas temperatūru. Paaugstinātā temperatūrā siltumvadošā pasta izžūst un iznīcina kondensatorus. Ik pēc 3 gadiem strāvas spailēm tiek uzklāts vadošas pastas slānis.
- Darbības nosacījumi un režīms ir stingri jāievēro. Apkārtējā temperatūra nedrīkst pārsniegt 40 grādus. Putekļi un mitrums nelabvēlīgi ietekmē ierīces darba elementu stāvokli.
Frekvences pārveidotāja atmaksāšanās
Elektrība nemitīgi kļūst dārgāka, organizāciju vadītāji ir spiesti taupīt dažādos veidos. Rūpnieciskajā ražošanā lielāko daļu enerģijas patērē mehānismi, kuriem ir elektromotori.
Elektrisko mašīnu un agregātu ierīču ražotāji piedāvā īpašas ierīces un ierīces elektromotoru vadīšanai. Šādas ierīces ietaupa elektroenerģiju. Tos sauc par invertoriem vai frekvences pārveidotājiem.
Chastotnik iegādes finansiālās izmaksas ne vienmēr attaisno ietaupījumus, jo to izmaksas ir salīdzināmas ar izmaksām. Ne vienmēr mehānisma piedziņu var ātri aprīkot ar invertoru. Kādas grūtības rodas šajā gadījumā? Analizēsim, kā iedarbināt asinhronos motorus, lai izprastu invertoru priekšrocības.
Dzinēja iedarbināšanas metodes
Ir iespējams definēt 4 metodes motoru iedarbināšanai.
- Tieša pārslēgšana, motoriem līdz 10 kW. Metode ir neefektīva paātrinājumam, pieaugošam griezes momentam, pārslodzēm. Strāvas ir 7 reizes lielākas par nominālvērtību.
- Ieslēgšana ar "trijstūra" un "zvaigžņu" shēmu izvēli.
- Mīkstā startera integrācija.
- Invertora pielietojums. Metode ir īpaši efektīva motora aizsardzībai, paātrinājumam, griezes momentam, enerģijas taupīšanai.
Invertora iedarbības ekonomiskais pamatojums
Invertora atmaksāšanās laiks tiek aprēķināts pēc iegādes izmaksu attiecības pret enerģijas ietaupījumu. Ietaupījumi parasti ir no 20% līdz 40% no nominālās motora jaudas.
Izmaksas samazina faktorus, kas palielina frekvences pārveidotāju veiktspēju:
- Samazinātas uzturēšanas izmaksas.
- Palielinot dzinēja kalpošanas laiku.
Aprēķināts ietaupījums:
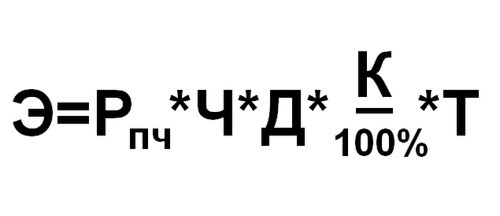
kur E - naudas ietaupīšana rubļos;
Ppch - invertora jauda;
H - darba stundas dienā;
D ir dienu skaits;
K ir paredzamā ietaupījuma procenta koeficients;
T ir enerģijas tarifs rubļos.
Atmaksāšanās laiks ir vienāds ar invertora iegādes izmaksu attiecību pret naudas ietaupījumu. Aprēķini liecina, ka atmaksāšanās laiks ir no 3 mēnešiem līdz 3 gadiem. Tas ir atkarīgs no motora jaudas.