Motora izstrādātais moments ir vienāds ar elektromagnētisko jaudu, kas dalīta ar elektriskās piedziņas sinhrono griešanās ātrumu.
M \u003d P em / ω 0
Elektromagnētiskā jauda ir jauda, kas tiek pārraidīta caur gaisa spraugu no statora uz rotoru, un tā ir vienāda ar zudumiem rotorā, ko nosaka pēc formulas:
P em \u003d m I 2 2 (r 2 '/s)
m ir fāžu skaits.
M \u003d M em \u003d (Pm / ω 0) (I 2') 2 (r 2'/s)
Elektromehāniskās īpašības indukcijas motors ir I2' atkarība no slīdēšanas. Bet, tā kā indukcijas mašīna darbojas tikai kā elektromotors, galvenā īpašība ir mehāniskais raksturlielums.
M \u003d Me m \u003d (Pm / ω 0) (I 2 ') 2 (r 2 '/s) - mehāniskā raksturlieluma vienkāršota izteiksme.
Aizvietojot pašreizējo vērtību šajā izteiksmē, mēs iegūstam: M \u003d / [ω 0 [(r 1 + r 2 '/s) 2 + (x 1 + x 2 ') 2 ]]
ω 0 vietā ir jāaizstāj mehāniskais ātrums, kā rezultātā tiek samazināts polu pāru skaits.
M = / [ω 0 [(r 1 + r 2 '/s) 2 + (x 1 + x 2 ') 2 ]] ir vienādojums mehāniskās īpašības asinhronais motors.
Kad asinhronais motors pāriet ģeneratora režīmā, griešanās ātrums ω > ω 0 un slīde kļūst negatīva (s Kad slīde mainās no 0 uz +∞, režīmu sauc par "elektromagnētisko bremžu režīmu".
Ņemot vērā slīdes vērtības no o līdz +∞, iegūstam raksturlielumu:
Pilnīgs asinhronā motora mehāniskais raksturlielums.
Kā redzams no mehāniskā raksturlieluma, tam ir divas galējības: viena slīdēšanas izmaiņu segmentā apgabalā no 0 līdz +∞, otra segmentā no 0 līdz -∞. dM/ds=0
M max = / ] + attiecas uz motora režīmu. - attiecas uz ģeneratora režīmu.
M max \u003d M cr M cr - kritiskais moments.
Slīdi, kurā moments sasniedz maksimumu, sauc par kritisko slīdi, un to nosaka pēc formulas: s cr = ±
Kritiskajai slīdēšanai ir vienāda vērtība gan motora, gan ģeneratora režīmā.
M cr vērtību var iegūt, aizvietojot kritiskās slīdēšanas vērtību momenta formulā.
Brīdi, kad slīde ir vienāda ar 1, sauc par sākuma griezes momentu. Sākuma griezes momenta izteiksmi var iegūt, formulā aizstājot 1:
M p \u003d / [ω 0 [(r 1 + r 2 ') 2 + (x 1 + x 2 ') 2 ]]
Tā kā maksimālā momenta saucējs formulā ir par vairākām kārtām lielāks par U f, tad pieņemts uzskatīt, ka M kr ≡U f 2 .
Kritiskā slīdēšana ir atkarīga no rotora tinuma aktīvās pretestības vērtības R 2 '. Sākuma griezes moments, kā redzams no formulas, ir atkarīgs no aktīvā pretestība rotors r 2’. šī palaišanas griezes momenta īpašība tiek izmantota asinhronajos motoros ar fāzes rotoru, kuros starta griezes momentu palielina, ieviešot aktīvo pretestību rotora ķēdē.
7. Tukšgaitas transformators
Režīms dīkstāves kustība transformatoru sauc par darbības režīmu, kad viens no transformatora tinumiem tiek darbināts no avota ar maiņspriegumu un ar citu tinumu atvērtām ķēdēm. Šis darbības režīms var būt reālā transformatorā, kad tas ir savienots ar tīklu, un slodze, kas tiek padota no tā sekundārā tinuma, vēl nav ieslēgta. Strāva I 0 iet caur transformatora primāro tinumu, tajā pašā laikā laikā sekundārais tinums nav strāvas, jo ķēde ir atvērta. Strāva I 0, ejot caur primāro tinumu, magnētiskajā ķēdē rada sinusoidāli mainīgu paplāti Ф 0, kas magnētisko zudumu dēļ atpaliek no strāvas fāzē par zuduma leņķi δ. 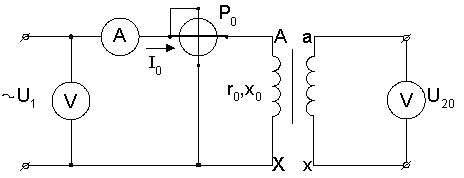
![]()
Tiek saukta grafiski izteikta elektromagnētiskā momenta atkarība no slīdēšanas mehāniskās īpašības indukcijas motors (3.3. att.).
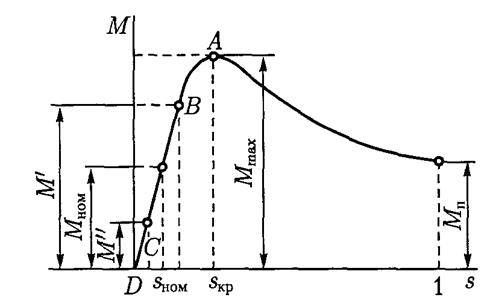
Rīsi. 3.3. Asinhronā motora mehāniskais raksturlielums
Mehāniskā raksturlieluma izveidošanai var izmantot vienkāršotu formulu asinhronā motora elektromagnētiskā griezes momenta aprēķināšanai (Klosa formula).

Šajā gadījumā kritisko nobīdi nosaka pēc formulas
![]()
kur λ m \u003d M max / M nom - dzinēja pārslodzes jauda.
Aprēķinot mehānisko raksturlielumu, jāpatur prātā, ka, ja slīdēšanas vērtības pārsniedz kritisko vērtību, aprēķinu precizitāte strauji samazinās. Tas ir saistīts ar izmaiņām asinhronā motora ekvivalentās ķēdes parametros, ko izraisa statora un rotora zobu magnētiskais piesātinājums, un strāvas frekvences palielināšanos rotora tinumā.
Asinhronā motora mehānisko raksturlielumu forma lielā mērā ir atkarīga no statora tinumam pievadītā sprieguma lieluma U 1 (3.4. att.) un rotora tinuma aktīvo pretestību r"2 (3.5. att.).

Rīsi. 3.4. Sprieguma ietekme U 1 par asinhronā motora mehāniskajiem parametriem
Asinhrono motoru katalogos sniegtie dati parasti nesatur informāciju par ekvivalentās ķēdes parametriem, kas apgrūtina formulu piemērošanu elektromagnētiskā griezes momenta aprēķināšanai. Tāpēc, lai aprēķinātu elektromagnētisko momentu, bieži tiek izmantota formula

Rīsi. 3.5. Pretestības ietekme r" 2 par asinhronā motora mehāniskajiem parametriem
Asinhronā motora darbības īpašības nosaka tā darbības raksturlielumi: rotācijas ātruma atkarība n 2, vārpstas griezes moments M 2, efektivitātes un jaudas koeficients cosφ 1 no dzinēja kravnesības R 2 .
Aprēķinot parametrus asinhrono motoru veiktspējas noteikšanai, tiek izmantota vai nu grafiskā metode, kuras pamatā ir sektoru diagrammas uzbūve, vai analītiskā metode.
Pamats jebkuras veiktspējas aprēķina metodes veikšanai ir atvērtās ķēdes un īssavienojuma testu rezultāti. Ja dzinējs ir projektēts, tad šie dati tiek iegūti tā aprēķina procesā.
Aprēķinot rezistoru pretestību r dob izmanto statora vai fāzes rotora ķēdēs, lai ierobežotu sākuma strāva vai ātruma kontrolei izmantojiet principu: šim konkrētajam asinhronajam motoram slīdēšana s proporcionāls šī dzinēja rotora ķēdes aktīvajai pretestībai. Saskaņā ar to vienlīdzība
(r 2 + r ext) /s= r2/s nom,
kur r2- paša rotora tinuma aktīvā pretestība darba temperatūrā; s- slīdēt, kad rotora ķēdē ar pretestību tiek ievietots rezistors r ext.
No šīs izteiksmes mēs iegūstam formulu papildu rezistora g aktīvās pretestības aprēķināšanai līdz 6, kas nepieciešama, lai iegūtu noteiktu palielinātu slīdi s pie noteiktas (nominālās) slodzes:
r ext = r 2 (s/s nom - 1).
Ir divas metodes palaišanas reostatu aprēķināšanai: grafiskā un analītiskā.
Grafiskā metode precīzāk, bet prasa dabisku mehānisko raksturlielumu konstruēšanu un dzinēja palaišanas diagrammu, kas ir saistīts ar lielu grafisko darbu apjomu.
Analītiskā metode palaišanas reostatu aprēķins ir vienkāršāks, bet mazāk precīzs. Tas ir saistīts ar faktu, ka metode ir balstīta uz pieņēmumu par asinhronā motora dabiskā mehāniskā raksturlieluma darba sekcijas taisnumu. Bet, kad slīdēšana ir tuvu kritiskai, šis pieņēmums rada ievērojamu kļūdu, kas ir nozīmīgāka, jo tuvāks ir sākotnējais palaišanas griezes moments M 1 līdz maksimālajam griezes momentam M m ah. Tāpēc analītiskā aprēķina metode ir piemērojama tikai sākotnējā palaišanas griezes momenta vērtībām M 1 < 0.7 M m ah .
Rezistoru pretestība palaišanas reostata posmos:
trešais r ext3 = r 2 (λ m - 1);
otrais r ext2 = r pievienot3 λ m;
vispirms r ext1 = r pievienot 2 λ m,
kur r 2 - asinhronā motora rotora fāzes tinuma aktīvā pretestība,
kur E 2 un es 2nom - kataloga dati izvēlētajam motora izmēram.
Palaišanas reostata pretestība uz tā pakāpieniem:
pirmais R PR1 = r ext1 + r ext2 + r ext3;
otrais R PR2 = r ext2 + r ext3
trešais R PR2 = r ext3.
Lai ierobežotu asinhrono dzinēju palaišanas strāvu ar vāveres būra rotors piemērot īpašas shēmas to iekļaušanai ar elementiem, kas ierobežo palaišanas strāvu. Visas šīs metodes ir balstītas uz statora tinumam pievadītā sprieguma samazināšanu. Visplašāk izmantotās shēmas ar rezistoru vai droseles iekļaušanu statora lineārajos vados (sk. 3.14. att. b).Šo elementu nepieciešamās pretestības aprēķins noteiktam palaišanas strāvas a samazinājumam attiecībā pret tās dabisko vērtību tiek veikts pēc formulām:
rezistoriem ar aktīvo pretestību
R n = 
par aizrīšanās
X L= 
Motora pretestība īssavienojuma režīmā Z k, om,
Z k =U 1 /es P
Šeit X uz un r k - šīs pretestības induktīvās un aktīvās sastāvdaļas
R k = Z k cosφ k ; x k =
Mākslīgā palaišanas griezes momenta samazināšana, kad tas ir ieslēgts R vai L būs
α m = α 2 i
3.1. tabula
Tātad, ja ir iestatīta vērtība α m, kas nosaka mākslīgā palaišanas griezes momenta vērtību M "n, tad aprēķināt atbilstošās vērtības R n vai x L varat izmantot iepriekš minētās formulas, aizstājot tajās α 2 vietā i, α m vērtība.
Elektriskā pretestība katalogos norādītie motora tinumi parasti atbilst +20 °C temperatūrai. Bet, aprēķinot motoru raksturlielumus un parametrus, to tinumu pretestība jāsasniedz līdz darba temperatūrai. Saskaņā ar spēkā esošo standartu darba temperatūra tiek ņemta atkarībā no karstumizturības klases elektriskā izolācija tiek izmantots dzinējā: ar B karstumizturības klasi darba temperatūra ir 75 ° C, bet ar F un H karstumizturības klasēm - 115 ° C. Tinumu pretestību pārrēķinu līdz darba temperatūrai veic, reizinot tinuma pretestību 20 ° C temperatūrā ar sildīšanas koeficientu k t:
r= r 20k t .
Šī koeficienta vērtības tiek ņemtas atkarībā no dzinēju mērķa un to izmēriem (rotācijas ass augstuma) (3.1. tabula).
SINHRONĀS MAŠĪNAS
PAMATJĒDZIENI
raksturīga iezīme sinhronās mašīnas ir stingra attiecība starp rotora ātrumu n 1 un frekvence maiņstrāva statora tinumā f 1:
n 1 = f 1 60/ R.
Citiem vārdiem sakot, statora un sinhronās mašīnas rotora rotējošais magnētiskais lauks griežas sinhroni, i., ar tādu pašu frekvenci.
Atbilstoši to konstrukcijai sinhronās mašīnas tiek iedalītas izcilā stabā un nenostiprinātā polā. Sinhronajās iekārtās rotoram ir izteikti stabi, uz kuriem atrodas lauka tinumu spoles, kas barotas līdzstrāva. Šādu mašīnu raksturīga iezīme ir magnētiskās pretestības atšķirība gar garenisko asi (gar polu asi) un šķērsasi (gar asi, kas iet starppolu telpā). Magnētiskā pretestība statora plūsmai gar garenisko asi dd daudz mazāka magnētiskā pretestība statora plūsmai gar šķērsasi qq. Sinhronajās iekārtās, kas nav izceļas, magnētiskās pretestības gar garenvirziena un šķērsenisko asi ir vienādas, jo šīm mašīnām gaisa sprauga gar statora perimetru ir vienāda.
Sinhronās mašīnas statora konstrukcija principā neatšķiras no asinhronās mašīnas statora. Statora tinumā mašīnas darbības laikā tiek inducēts EML un plūst strāvas, kas rada magnetomotīves spēku (MFF), kura maksimālā vērtība ir
F 1 =0,45m 1 es 1 w 1 k rev1 / R
Šis MDS rada rotējošu magnētisko lauku un gaisa spraugā δ iekārta rada magnētisko indukciju, kuras sadales grafiks katra polu sadalījuma t ietvaros ir atkarīgs no rotora konstrukcijas (4.1. att.).
Izcilā pola sinhronajai mašīnai ir spēkā sprieguma vienādojums:
Ú 1 =Ė 0 + Ė 1d+ Ė 1q+ Ė σ1 – İ 1 r 1
kur Ė 0 - sinhronās mašīnas galvenais EML, proporcionāls sinhronās mašīnas galvenajai magnētiskajai plūsmai F 0 ; Ė 1 d - sinhronās mašīnas armatūras reakcijas EML gar garenasi, proporcionāls armatūras reakcijas MMF gar garenasi F 1d; Ė σ1 - armatūras reakcijas EMF gar šķērsasi, proporcionāla armatūras reakcijai MMF gar šķērsasi F 1q; Ė σ1 - noplūdes EML noplūdes magnētiskās plūsmas klātbūtnes dēļ F 0, šī EMF vērtība ir proporcionāla statora tinuma noplūdes induktīvā pretestībai X 1
Ė σ1 = jİ 1r
İ 1 r 1 - aktīvs sprieguma kritums statora fāzes tinumā, parasti šī vērtība tiek ignorēta, risinot problēmas tās mazās vērtības dēļ.
Rīsi. 4.1. Magnētiskās indukcijas sadalījuma grafiki pa šķērsasi
netiešais pols ( a) un izteikts pols ( b) sinhronās mašīnas:
1 - MDS grafiks; 2 - magnētiskās indukcijas grafiks
Sinhronai mašīnai ar nenoteiktu polu sprieguma vienādojumam ir šāda forma
Ú 1 =Ė 0 + Ė c- İ 1 r 1
Šeit
Ė c= Ė 1 + Ė σ1
kur Ė 1 - Armatūras reakcijas emf no implicītā pola sinhronās mašīnas. Aplūkotie spriegumu vienādojumi atbilst vektoru spriegumu diagrammām. Šīs diagrammas ir jāveido, lai noteiktu vai nu iekārtas galveno emf E 0 vai statora tinuma spriegums U 1. Jāpatur prātā, ka stresa vienādojumi un tiem atbilstošie vektoru diagrammas neņem vērā sinhronās mašīnas magnētiskās ķēdes magnētisko piesātinājumu, kas, kā zināms, ietekmē induktīvo pretestību vērtību, izraisot to samazināšanos. Šī piesātinājuma uzskaite ir sarežģīts uzdevums, tāpēc, aprēķinot sinhrono mašīnu EML un spriegumus, viņi parasti izmanto praktiskā diagramma EMF, kas ņem vērā magnētiskās sistēmas piesātinājuma stāvokli, ko izraisa armatūras reakcija, kad sinhronā mašīna ir noslogota. Konstruējot praktisku EMF diagrammu, armatūras reakcijas magnetizējošais spēks netiek sadalīts garenvirziena un šķērssastāvdaļās, tāpēc šo diagrammu var izmantot gan izceļošā pola, gan implicītā pola mašīnu aprēķinos.
Risinot problēmas, kas saistītas ar sinhroniem ģeneratoriem, kas savienoti paralēli tīklam, vai ar sinhronajiem motoriem, viņi izmanto leņķiskās īpašības sinhronās mašīnas, kas attēlo elektromagnētiskā momenta atkarību M no slodzes leņķa θ. Šajā gadījumā jāatceras, ka izcilā pola sinhronajās mašīnās ir divi punkti: galvenais M galvenais un reaktīvs M p, un mašīnās ar nenoslēgtu polu - tikai galvenais:
![]()
Slodzes leņķis θ nom atbilst nominālais griezes moments M nom. Sinhronās mašīnas maksimālais griezes moments nosaka sinhronās mašīnas pārslodzes spēju, kas ir svarīga abiem sinhronie ģeneratori kas darbojas paralēli tīklam, un sinhronajiem motoriem. Sinhronajās iekārtās ar izbīdāmu polu maksimālais griezes moments atbilst slodzes leņķim θ = 90°, iekārtās ar izvirzīto polu θ kr< 90° и обычно составляет 60 - 80° в зависимости от соотношения основного и реактивного электромагнитных моментов этой машины.
Lai aprēķinātu kritisko slodzes leņķi, kas nosaka izcilā pola sinhrono mašīnu pārslodzes kapacitāti, varat izmantot izteiksmi.
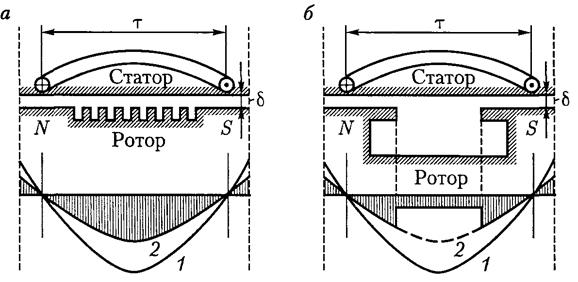
Asinhronā motora griezes momenta lielumu lielā mērā ietekmē fāzes nobīde starp strāvu I 2 un e. d.s. E 2S rotors.
Apsveriet gadījumu, kad rotora tinuma induktivitāte ir maza un tāpēc fāzes nobīdi var neievērot (223. att., a).
Statora rotējošais magnētiskais lauks šeit tiek aizstāts ar N un S polu lauku, kas rotē, teiksim, pulksteņrādītāja virzienā. Izmantojot noteikumu labā roka, noteikt virzienu e. d.s. un strāvas rotora tinumā. Rotora strāvas, mijiedarbojoties ar rotējošo magnētisko lauku, rada griezes momentu. Spēku virzienus, kas iedarbojas uz strāvu nesošiem vadītājiem, nosaka kreisās puses likums. Kā redzams zīmējumā, rotors spēku iedarbībā griezīsies tajā pašā virzienā kā pats rotējošais lauks, tas ir, pulksteņrādītāja virzienā.
Apsveriet otro gadījumu, kad rotora tinuma induktivitāte ir liela. Šajā gadījumā fāzes nobīde starp rotora strāvu I 2 un e. d.s. rotors E 2S arī būs liels. Zīm. 223, b, asinhronā motora statora magnētiskais lauks joprojām ir parādīts pulksteņrādītāja virzienā rotējošu polu N un S veidā. e virziens. d.s. paliek tāds pats kā attēlā. 223, a, bet sakarā ar strāvas aizkavēšanos fāzē, ass magnētiskais lauks rotors vairs nesakritīs ar statora lauka neitrālu līniju, bet nobīdīsies par kādu leņķi pret magnētiskā lauka rotāciju. Tas novedīs pie tā, ka kopā ar vienā virzienā vērsta griezes momenta veidošanos daži vadītāji radīs pretēju griezes momentu.
No tā var redzēt, ka motora kopējais griezes moments fāzes nobīdes laikā starp strāvu un e. d.s. rotors ir mazāks nekā gadījumā, ja I 2 un E 2S atrodas fāzē. Var pierādīt, ka asinhronā motora griezes momentu nosaka tikai rotora strāvas aktīvā sastāvdaļa, t.i., strāva I 2 cos, un ka to var aprēķināt pēc formulas:

Ф m - statora magnētiskā plūsma (un arī aptuveni vienāda ar iegūto asinhronā motora magnētisko plūsmu);
Fāzes leņķis starp e. d.s. un tinuma fāzes strāva
C ir nemainīgs koeficients.
Pēc aizstāšanas:
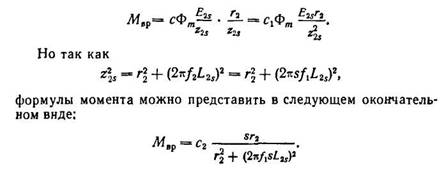
No pēdējās izteiksmes var redzēt, ka asinhronā motora griezes moments ir atkarīgs no slīdēšanas.
Zīm. 224 parāda motora griezes momenta un slīdēšanas līkni A. No līknes redzams, ka iedarbināšanas brīdī, kad s=l un n = 0, motora griezes moments ir mazs. Tas izskaidrojams ar to, ka palaišanas brīdī strāvas frekvence rotora tinumā ir vislielākā un tinuma induktīvā pretestība ir liela. Rezultātā cos ir maza vērtība (jo
|
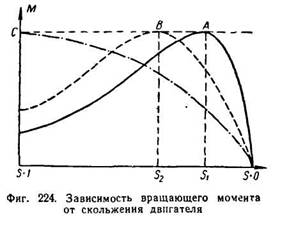
rinda 0,1-0,2). Tāpēc, lai gan starta strāva ir liela, starta griezes moments būs mazs.
Ar nelielu slīdēšanu S 1 motora griezes momentam būs maksimālā vērtība. Turpinot samazināties slīdēšanai vai, citiem vārdiem sakot, palielinoties dzinēja griešanās ātrumam, tā griezes moments strauji samazināsies.
Lai pabīdītu un slīdot s = 0, arī dzinēja griezes moments būs vienāds ar nulli.
Jāņem vērā, ka asinhronajā motorā slīdēšana, kas vienāda ar nulli, praktiski nevar pastāvēt. Tas ir iespējams tikai tad, ja rotoru no ārpuses piegādā griezes moments statora lauka griešanās virzienā.
Starta griezes moments var palielināt, ja palaišanas brīdī fāzes nobīde starp strāvu un e. d.s. rotors. No formulas
var redzēt, ka, ja ar nemainīgu rotora tinuma induktīvo pretestību palielinās aktīvā pretestība, tad samazināsies pats leņķis, kas novedīs pie tā, ka palielināsies arī motora griezes moments. To praksē izmanto, lai palielinātu dzinēja palaišanas griezes momentu. Iedarbināšanas brīdī rotora ķēdē tiek ievadīta aktīva pretestība (palaišanas reostats), kas pēc tam tiek noņemta, tiklīdz motors palielina ātrumu.
Palielinot palaišanas griezes momentu, motora maksimālais griezes moments tiek iegūts ar lielāku slīdēšanu (224. att. līknes B punkts S 2). Palielinot rotora ķēdes aktīvo pretestību palaišanas brīdī, var panākt, ka maksimālais griezes moments būs iedarbināšanas brīdī (s = 1 līkne C).
Asinhronā motora griezes moments ir proporcionāls sprieguma kvadrātam, tāpēc pat neliels sprieguma samazinājums ir saistīts ar strauju griezes momenta samazināšanos.
Asinhronā motora statora tinumam piegādātā jauda P 1 ir vienāda ar:
![]()
kur m 1 ir fāžu skaits.
Motora statoram ir šādi enerģijas zudumi:
1) statora tinumā R es. =m 1 I 1 2 r 1;
2) statora tēraudā un histerēzes un virpuļstrāvas P C .
Rotoram pievadītā jauda ir rotējošā magnētiskā lauka jauda, ko sauc arī par elektromagnētisko jaudu P eM .
Elektromagnētiskā jauda ir vienāda ar starpību starp motoram piegādāto jaudu un zudumiem motora statorā, t.i.
|

Atšķirība starp Р eM un atspoguļo elektriskos zudumus rotora tinumā Р eP, ja neņemam vērā zudumus rotora tēraudā to nenozīmīguma dēļ (rotora remagnetizācijas frekvence parasti ir ļoti maza):

Tāpēc zudumi rotora tinumā ir proporcionāli rotora slīdēšanai.
Ja no mehāniskā jauda rotora radītos mehāniskos zudumus R mx no berzes rotora gultņos, gaisa berzes u.c., kā arī papildus zudumus R D, kas rodas no slodzes un rotora izkliedēšanas laukiem, un zudumus, ko rada: magnētiskā lauka pulsācijas. statora zobos un rotorā, tad uz motora vārpstas būs lietderīgā jauda, ko apzīmējam ar P 2 .
Asinhronā motora efektivitāti var noteikt pēc formulas:

No pēdējās izteiksmes var redzēt, ka asinhronā motora griešanās moments ir proporcionāls rotējošās magnētiskās plūsmas lieluma, rotora strāvas un leņķa starp e kosinusa reizinājumam. d.s. rotors un tā strāva,

No asinhronā motora ekvivalentās ķēdes tiek iegūta samazinātās rotora strāvas vērtība, ko mēs sniedzam bez pierādījuma.