การควบคุมความถี่ของการหมุนของไดรฟ์ไฟฟ้าเป็นหนึ่งในงานที่สำคัญที่สุดของวิศวกรรมไฟฟ้าสมัยใหม่ การพัฒนาและการประยุกต์ใช้วิธีการควบคุมที่มีเหตุผลสามารถเพิ่มประสิทธิภาพของกลไก ปรับปรุงคุณภาพของผลิตภัณฑ์ ลดความซับซ้อนของส่วนกลไกของไดรฟ์ ลดการใช้พลังงาน ฯลฯ
ความถี่เอาท์พุทของเครื่องกำเนิดไฟฟ้าเป็นหนึ่งในพารามิเตอร์ที่สำคัญที่กำหนดการจัดอันดับของเครื่องกำเนิดไฟฟ้า เอาต์พุตทางไฟฟ้าของเครื่องกำเนิดไฟฟ้าจะต้องรักษาไว้ที่ความถี่คงที่ 50 Hz หรือ 60 Hz เพื่อให้ตรงกับสัญญาณเอาต์พุตของมาตรฐาน เครือข่ายไฟฟ้าหรือการตอบสนองความถี่ของเครื่องดนตรีของคุณ คุณอาจพบพื้นที่แยกต่างๆ ของกริดเดียวกันที่ทำงานในความถี่ที่ต่างกัน จากนั้นจึงจำเป็นต้องเปลี่ยนความถี่เอาต์พุตของเครื่องกำเนิดไฟฟ้าตามกำลังของอุปกรณ์ที่จะจ่ายไฟหรือกริดที่เครื่องกำเนิดไฟฟ้าของคุณเชื่อมต่ออยู่
ด้วยการควบคุมความเร็ว ไม่ควรผสมการเปลี่ยนแปลงตามธรรมชาติของความเร็วของมอเตอร์ไฟฟ้าตามลักษณะทางกลของมันเมื่อโหลดบนเพลาขับเปลี่ยนไป ข้อบังคับคือการเปลี่ยนแปลงแบบบังคับในความเร็วในการหมุนของไดรฟ์ไฟฟ้า ขึ้นอยู่กับข้อกำหนดของกลไกการขับเคลื่อน
การเปลี่ยนความเร็วของเครื่องยนต์เป็นความถี่เอาท์พุท เครื่องกำเนิดไฟฟ้าสมัยใหม่ประกอบด้วยเครื่องยนต์ที่เชื่อมต่อโดยตรงกับเครื่องกำเนิดไฟฟ้า กระแสสลับเพื่อการผลิตไฟฟ้า วิธีหนึ่งที่พบบ่อยที่สุดในการเปลี่ยนความถี่เอาต์พุตของเครื่องกำเนิดไฟฟ้าคือการเปลี่ยนความเร็วของเครื่องยนต์
ปัจจัยทั้งสองมีความสัมพันธ์กันโดยสูตรต่อไปนี้ ในกรณีของเครื่องกำเนิดไฟฟ้าขนาดเล็กหรือที่อยู่อาศัย คุณสามารถเปลี่ยนการตั้งค่าความเร็วเครื่องยนต์โดยทำการเปลี่ยนแปลงเล็กน้อยบนแผงควบคุมของเครื่อง ทำตามขั้นตอนด้านล่างเพื่อเปลี่ยนความถี่ออสซิลเลเตอร์จาก 60Hz เป็น 50Hz
วิธีการควบคุมใด ๆ มีลักษณะตามตัวชี้วัดหลักดังต่อไปนี้:
ช่วงการควบคุม - อัตราส่วนของความเร็วสูงสุดถึงต่ำสุดซึ่งสามารถหาได้ในไดรฟ์เช่น ;
ความราบรื่นของการควบคุม - จำนวนความเร็วคงที่ที่ได้รับในช่วงการควบคุมที่กำหนด
ประสิทธิภาพ - คำนึงถึงต้นทุนที่เกี่ยวข้องกับการสร้างวิธีการควบคุมและการสูญเสียพลังงานเพิ่มเติมที่เกิดขึ้นในไดรฟ์
ตัวควบคุมเครื่องกำเนิดไฟฟ้าจะตรวจสอบและควบคุมแบบเรียลไทม์ คุณลักษณะการป้องกันในตัวจะปิดเครื่องกำเนิดไฟฟ้าของคุณโดยอัตโนมัติในกรณีที่เครื่องยนต์มีรอบการทำงานมากเกินไปหรือความถี่เอาต์พุตต่ำมาก บทความถัดไป: เครื่องกำเนิดไฟฟ้าทำงานอย่างไร ตัวแปลงความถี่ หากคุณกำลังใช้เครื่องกำเนิดความเร็วคงที่ คุณสามารถเชื่อมต่อเครื่องแปลงความถี่กับอุปกรณ์ของคุณได้ ตัวแปลงความถี่เป็นการผสมผสานระหว่างวงจรเรียงกระแสและอินเวอร์เตอร์ วงจรเรียงกระแสใช้เครื่องกำเนิดไฟฟ้ากระแสสลับเพื่อสร้าง กระแสตรง.
ความเสถียรของไดรฟ์ - การเปลี่ยนแปลงความเร็วในการหมุนด้วยการเปลี่ยนแปลงของแรงบิดบนเพลามอเตอร์ ความเสถียรของงานถูกกำหนดโดยความแข็งแกร่งของลักษณะทางกลทั้งหมด
ทิศทางของการควบคุมบ่งชี้ว่าความเร็วจะเปลี่ยนลงหรือขึ้นจากความเร็วหลักของไดรฟ์เท่านั้น หรืออาจปรับทั้งขึ้นและลงได้
การเปลี่ยนแปลงแรงดันไฟฟ้าที่เกี่ยวข้องนั้นเกี่ยวข้องกับวัตถุประสงค์ของอุปกรณ์และยังขึ้นอยู่กับแอพพลิเคชั่นที่ใช้ตัวแปลงความถี่ ตามเนื้อผ้า คอนเวอร์เตอร์ความถี่ เช่น คอนเวอร์เตอร์แบบโรตารี่และชุดเครื่องกำเนิดไฟฟ้ามอเตอร์ จะทำมาจากส่วนประกอบทางไฟฟ้าเครื่องกล ด้วยการถือกำเนิดของอุปกรณ์อิเล็กทรอนิกส์แบบโซลิดสเตต ตอนนี้อุปกรณ์เหล่านี้ถูกสร้างขึ้นเป็นหน่วยอิเล็กทรอนิกส์เต็มรูปแบบ
เหตุผลทางเศรษฐกิจสำหรับผลกระทบของอินเวอร์เตอร์
ตัวแปลงความถี่ยังพบว่าใช้ในอุตสาหกรรมการบินและอวกาศเพื่อแปลง 50 Hz หรือ 60 Hz เป็นเอาต์พุต 400 Hz ที่ใช้ในภาคพื้นดิน หน่วยพลังงานอากาศยาน. ระบบเหล่านี้ยังใช้เพื่อควบคุมความเร็วของพัดลมและปั๊ม และโหลดแรงบิดผันแปรอื่น ๆ ที่ทำงานด้วยความเร็วแปรผัน
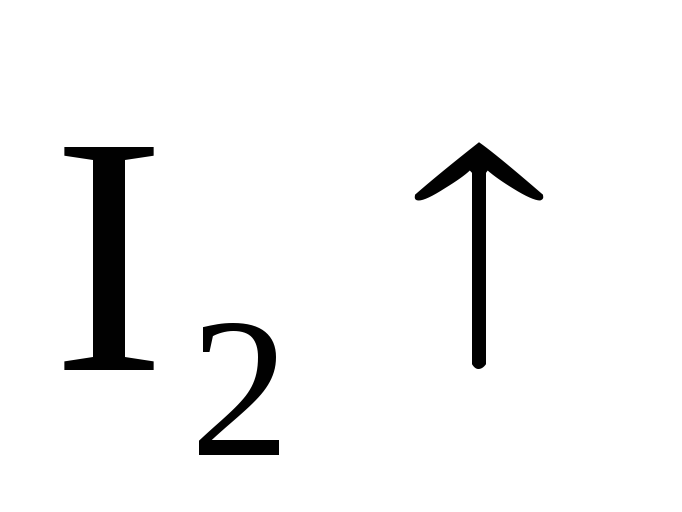
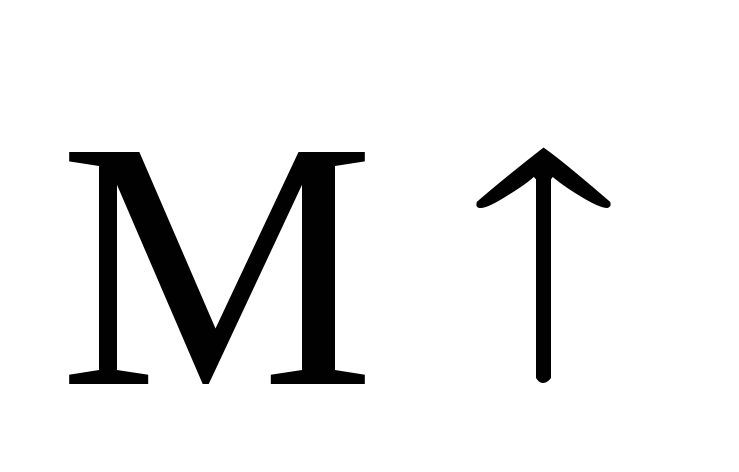
ความเร็วโรเตอร์ของมอเตอร์แบบอะซิงโครนัสถูกกำหนดโดยสูตร:
โดยที่ f คือความถี่ของกระแสสลับ p คือจำนวนคู่ของเสาขดลวดสเตเตอร์ ส - สลิป
จากสูตรข้างต้นสรุปได้ว่าความเร็วรอบ มอเตอร์เหนี่ยวนำสามารถปรับได้โดยการเปลี่ยนค่าใดค่าหนึ่งจากสามค่า:
เครื่องกำเนิดไฟฟ้าแบบอิเล็กทรอนิกส์ความเร็วตัวแปร มีออสซิลเลเตอร์ประเภทพิเศษที่เรียกว่าตัวแปลงอิเล็กทรอนิกส์ความเร็วตัวแปรซึ่งการเปลี่ยนความเร็วของมอเตอร์จะเปลี่ยนความเร็วของเครื่องกำเนิดไฟฟ้ากระแสสลับเพื่อสร้างเอาต์พุตความถี่ตัวแปรโดยอัตโนมัติ จากนั้นจึงใช้ตัวแปลงความถี่เพื่อแก้ไขเอาต์พุตของเครื่องกำเนิดไฟฟ้าให้ตรงกับความถี่เอาต์พุตที่ต้องการที่ 50 Hz หรือ 60 Hz การใช้อุปกรณ์นี้ทำให้ไม่จำเป็นต้องใช้ไดรฟ์และหม้อแปลงแบบปรับความเร็วได้
ใบ;
จำนวนคู่ของขั้วของฟลักซ์แม่เหล็กสเตเตอร์ p;
ความถี่ปัจจุบันของสเตเตอร์ฉ
ให้เราพิจารณาความเป็นไปได้ในการควบคุมความเร็วของโรเตอร์โดยการเปลี่ยนสลิป สลิปเป็นหน้าที่ของพารามิเตอร์ต่างๆ ของเครื่องยนต์:
s = f(R 1 , X 1 ;R 2 ; X 2 ; U)
โดยที่ R 1 X 1 - ความต้านทานเชิงแอคทีฟและอุปนัยของวงจรสเตเตอร์; R 2 , X 2 - เหมือนกันโรเตอร์;
ข้อเสียของเทคโนโลยีนี้คือ ส่วนประกอบอิเล็กทรอนิกส์ที่นอกจากจะมีราคาแพงแล้ว ไม่เหมาะกับการใช้งานในสภาพแวดล้อมที่เลวร้ายซึ่งเครื่องกำเนิดไฟฟ้าทำงานตามปกติ สิ่งสำคัญคือต้องสังเกตว่ามันแตกต่างจากเครื่องกำเนิดความเร็วแบบแปรผันซึ่งมีระบบส่งกำลังแบบแปรผันอย่างต่อเนื่องซึ่งทำให้ความเร็วของเครื่องยนต์เปลี่ยนแปลงไปแต่ยังคงรักษาไว้ ความเร็วคงที่เครื่องกำเนิดไฟฟ้า สิ่งนี้ไม่ได้เปลี่ยนความถี่เอาต์พุต แต่อนุญาตให้เครื่องกำเนิดเปลี่ยนเอาต์พุตของเครื่องกำเนิดเพื่อให้เป็นไปตามข้อกำหนดของโหลดแบบแปรผัน
รูปต่อไปนี้แสดงรูปแบบวงจรสมมูลของบล็อกมอเตอร์เหนี่ยวนำ ซึ่งหมายความว่าเมื่อเริ่มต้นสลิปมีค่าเท่ากับหนึ่งและที่ งานซิงโครนัสด้วยความถี่ไฟฟ้า - ศูนย์ คุณสามารถกำหนดพารามิเตอร์บล็อกนี้ในแง่ของพารามิเตอร์ของวงจรสมมูลก่อนหน้า หรือในแง่ของการจัดอันดับมอเตอร์ที่ใช้โดยบล็อกเพื่อหาพารามิเตอร์เหล่านี้
U - แรงดันไฟฟ้าของมอเตอร์
จะเห็นได้จากสูตรที่ว่าในการเปลี่ยนสลิป ตัวต้านทานหรือตัวเหนี่ยวนำเพิ่มเติมสามารถใส่เข้าไปในสเตเตอร์หรือวงจรขดลวดของโรเตอร์ หรือแรงดันไฟของมอเตอร์จะลดลง
การเปลี่ยนแปลงแรงดันไฟฟ้า
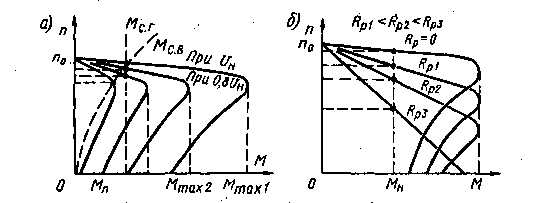
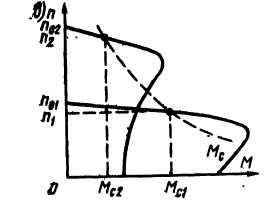
เป็นที่ทราบกันดีอยู่แล้วว่าแรงบิดสูงสุดของมอเตอร์เหนี่ยวนำเป็นสัดส่วนกับกำลังสองของแรงดันไฟหลัก และลักษณะทางกลที่แรงดันไฟฟ้าต่างๆ มีรูปแบบดังแสดงในรูปที่ 5.8, a การวิเคราะห์คุณลักษณะเหล่านี้ร่วมกับคุณลักษณะของโมเมนต์ความต้านทาน Ms.g ของอุปกรณ์รอก แสดงให้เห็นว่าการควบคุมความเร็วสามารถทำได้ในช่วงที่แคบมาก ที่แรงดันไฟฟ้า 0.6 U n เครื่องยนต์จะไม่สตาร์ทเนื่องจาก Mp<Мс.г, а при снижении напряжения ниже 0,6 UB работающий двигатель остановится.
บล็อกมีพอร์ตระบายความร้อนเพิ่มเติมสองพอร์ต หนึ่งพอร์ตต่อหนึ่งม้วน ซ่อนไว้ตามค่าเริ่มต้น การดำเนินการนี้จะแสดงพอร์ตระบายความร้อนบนไอคอนบล็อกและเพิ่มแท็บการพึ่งพาอุณหภูมิและพอร์ตระบายความร้อนลงในกล่องโต้ตอบบล็อก แท็บเหล่านี้จะอธิบายในภายหลังในหน้าความช่วยเหลือนี้
สมมติฐานและข้อจำกัดที่สำคัญ
ใช้พอร์ตระบายความร้อนเพื่อจำลองผลกระทบของการสูญเสียความต้านทานทองแดง ซึ่งจะแปลงพลังงานไฟฟ้าเป็นความร้อน แบบจำลองเอฟเฟกต์ความร้อนในไดรฟ์แบบหมุนและแบบแปลน โมเดลนี้ใช้สมมติฐานดังต่อไปนี้ บล็อกไม่ได้จำลองกลไกการเริ่มต้นของมอเตอร์เหนี่ยวนำเฟสเดียว . เลือกวิธีการกำหนดพารามิเตอร์บล็อกวิธีใดวิธีหนึ่งต่อไปนี้
ค่อนข้างดีกว่าในการควบคุมมอเตอร์ที่หมุนกลไกด้วยโมเมนต์ความต้านทานพัดลม Ms.v - ช่วงการควบคุมจะขยายออก
การเปลี่ยนพารามิเตอร์ R 1 , X 1 , X 2
การเพิ่มขึ้นของพารามิเตอร์เหล่านี้มีผลเกือบเหมือนกันกับลักษณะทางกลของมอเตอร์เมื่อแรงดันไฟฟ้าลดลง และการเพิ่มความต้านทาน R 1 ยังเพิ่มการสูญเสียพลังงานในวงจรสเตเตอร์ด้วย
วิธีเชื่อมต่อเครื่องแปลงความถี่
ตามพารามิเตอร์วงจรสมมูล - ระบุพารามิเตอร์ทางไฟฟ้าสำหรับวงจรสมมูลของมอเตอร์ โดยการจัดอันดับเครื่องยนต์ . ความต้านทานขดลวดสเตเตอร์ ตัวเลือกนี้จะปรากฏเฉพาะเมื่อคุณเลือกตัวเลือกวงจรที่เทียบเท่าสำหรับตัวเลือก Model Parameterization
จะเปลี่ยนความเร็วของเครื่องยนต์ได้อย่างไร?
ความต้านทานของโรเตอร์ให้สัมพันธ์กับสเตเตอร์ ตัวเหนี่ยวนำขดลวดสเตเตอร์ การเหนี่ยวนำของโรเตอร์ให้สัมพันธ์กับสเตเตอร์ การเหนี่ยวนำแม่เหล็กของสเตเตอร์ ค่าของมันนั้นประเมินได้ยากจากพารามิเตอร์ของเครื่องยนต์ แต่เอฟเฟกต์มักจะน้อย กำลังทางกลที่มอเตอร์ให้เมื่อวิ่งด้วยความเร็วที่กำหนด ตัวเลือกนี้จะมองเห็นได้ก็ต่อเมื่อเลือก Motor สำหรับตัวเลือก Model Parameterization
รูปที่ 5.8 ลักษณะทางกลของมอเตอร์แบบอะซิงโครนัสเมื่อเปลี่ยน
แรงดันและความต้านทานของวงจรโรเตอร์
ในตอนท้ายของยุค 50 ไดรฟ์ไฟฟ้าแบบปีกผีเสื้อที่เรียกว่าได้รับการกระจายบางส่วนซึ่งความต้านทานเพิ่มขึ้น X 1 ทำได้โดยการรวมแอมพลิฟายเออร์แม่เหล็ก (ตัวเหนี่ยวนำความอิ่มตัว) ไว้ในวงจรสเตเตอร์ ข้อเสียเปรียบหลักของไดรฟ์ไฟฟ้าดังกล่าว (รวมถึงเมื่อแรงดันไฟฟ้า U เปลี่ยนแปลง) คือกำลังเลื่อนจะถูกแปลงเป็นความร้อนในโรเตอร์โดยสมบูรณ์ ทำให้มอเตอร์ร้อนเกินไป ในโช้คไดรฟ์ ปัจจัยด้านกำลัง cosf ก็ลดลงเช่นกัน
ความเร็วที่มอเตอร์ส่งพิกัดกำลังทางกลที่กำหนด แรงดันไฟฟ้าแบบบรรทัดต่อบรรทัดที่ระบุพิกัดมอเตอร์ ค่าเริ่มต้นคือ 60 เฮิรตซ์ กระแสไฟตรงที่มอเตอร์ส่งพิกัดกำลังทางกลที่ระบุ
คืนทุนของตัวแปลงความถี่
จากประสิทธิภาพของเครื่องยนต์ . เปอร์เซ็นต์ของกำลังไฟฟ้าเข้าของมอเตอร์ที่ส่งไปยังโหลดทางกลเมื่อทำงานที่ความเร็วที่กำหนด โคไซน์ของมุมที่กระแสไฟจ่ายให้แรงดันไฟจ่ายเมื่อทำงานด้วยกำลังทางกลที่กำหนด
จากที่กล่าวมาข้างต้น การเพิ่มขึ้นของพารามิเตอร์ R 1 X 1 X 2 หรือ U ลดลง ไม่เพียงเพื่อการควบคุมความเร็วเท่านั้น แต่ยังเกิดจากสาเหตุอื่นๆ อีกด้วย (เช่น อิทธิพลของพารามิเตอร์เครือข่าย) คือ ไม่พึงปรารถนาอย่างมากสำหรับมอเตอร์แบบอะซิงโครนัส
เปลี่ยนความต้านทานเชิงแอคทีฟของวงจรโรเตอร์
พารามิเตอร์เดียวของมอเตอร์แบบอะซิงโครนัสซึ่งแรงบิดสูงสุดของมอเตอร์ไม่ขึ้นกับคือความต้านทาน R 2 . ดังนั้น เมื่อมีการเพิ่มตัวต้านทานเพิ่มเติมในวงจรโรเตอร์ ความจุเกินทางกลของมอเตอร์จะถูกรักษาไว้ และซึ่งเป็นสิ่งสำคัญมาก การสูญเสียพลังงานส่วนใหญ่จะถูกปล่อยออกมาบนตัวต้านทาน กล่าวคือ ภายนอกมอเตอร์
วิธีการรักษาตัวแปลงความถี่?
ความต้านทานสเตเตอร์ที่วัดได้ จำนวนคู่ขั้วทั้งหมดสำหรับมอเตอร์ เลือกจากการกำหนดค่าเครื่องยนต์ต่อไปนี้ การกำหนดค่าสตาร์ - เชื่อมต่อขดลวดสเตเตอร์ของมอเตอร์ในสตาร์ . แรงดันไฟฟ้าระหว่างเส้นที่มอเตอร์จ่ายไป
ความเร็วของโรเตอร์ที่จุดเริ่มต้นของการจำลอง ค่าสัมประสิทธิ์อุณหภูมิความต้านทาน เวกเตอร์เส้น 1 คูณ 2 ที่กำหนดแฟคเตอร์ α ในสมการที่เกี่ยวข้องกับการต้านทานอุณหภูมิตามที่อธิบายไว้ในแบบจำลองความร้อนสำหรับหน่วยแอคทูเอเตอร์ องค์ประกอบแรกสอดคล้องกับสเตเตอร์และองค์ประกอบที่สองคือโรเตอร์
วิธีนี้ใช้ได้กับมอเตอร์ที่มีเฟสโรเตอร์และวงแหวนเท่านั้น แทบจะเป็นไปไม่ได้เลยที่จะเปลี่ยนความต้านทานของโรเตอร์กรงกระรอก ลักษณะทางกลสำหรับความต้านทานโรเตอร์ต่างๆ แสดงในรูปที่ 5.8, b.
กระบวนการควบคุมโดยสังเขปมีดังนี้: M=Ms, n=const;  -
- -
- -
- -
- -
- -
- -
- . รายการอธิบายโดยสูตร (2-6)
. รายการอธิบายโดยสูตร (2-6)
อุณหภูมิที่กำหนดพารามิเตอร์มอเตอร์ แท็บนี้จะแสดงเฉพาะสำหรับบล็อกที่มีพอร์ตระบายความร้อนแบบเปิดเท่านั้น ในส่วน พอร์ตระบายความร้อน เวกเตอร์เส้น 1 คูณ 2 ที่กำหนดมวลความร้อนสำหรับขดลวดสเตเตอร์และโรเตอร์ มวลความร้อนคือพลังงานที่จำเป็นในการเพิ่มอุณหภูมิขึ้นหนึ่งองศา
เวกเตอร์เส้น 1 คูณ 2 ที่ระบุอุณหภูมิของสเตเตอร์และพอร์ตระบายความร้อนของโรเตอร์เมื่อเริ่มการจำลอง บล็อกมีพอร์ตต่อไปนี้ พอร์ตการหมุนทางกล หน้าที่ของกังหันคือการแปลงพลังงานของน้ำ ไอน้ำ หรือลมให้เป็นพลังงานกล ซึ่งจะทำให้เครื่องกำเนิดไฟฟ้าหมุนได้ เครื่องกำเนิดไฟฟ้าแปลงพลังงานกลเป็นไฟฟ้า ในโรงไฟฟ้าพลังน้ำ การรวมกันระหว่างเครื่องกำเนิดไฟฟ้าและกังหันนี้เรียกว่าชุดเครื่องกำเนิดไฟฟ้า
จากมุมมองของช่วงของการควบคุม ความราบรื่น ประสิทธิภาพ วิธีการนี้จะคล้ายกับการควบคุมความเร็วของมอเตอร์กระแสตรงโดยการเปลี่ยนความต้านทานของวงจรกระดอง มันถูกใช้ในไดรฟ์ไฟฟ้าของกว้านและกว้านของเรือ Andijan และ Povenets
เปลี่ยนจำนวนคู่ของเสา
มอเตอร์แบบอะซิงโครนัสซึ่งขดลวดสเตเตอร์สามเฟสสามารถสร้างสนามแม่เหล็กหมุนได้โดยใช้จำนวนคู่ขั้วต่างกัน
น้ำไหลทำให้กังหันหมุน
ในเครื่องกำเนิดไฟฟ้านี้ น้ำจะไหลผ่านชัตเตอร์และเข้าไปในสกรอลล์ มันหมุนใบพัดกังหันแล้วดึงไปทางเพลากังหันเพื่อออกจากลิงค์ด้านล่าง พลังงานกลที่เกิดจากแรงมหาศาลที่ผลักน้ำเข้าสู่กังหันจะถูกถ่ายโอนไปยังเครื่องกำเนิดไฟฟ้า จากนั้นจะเปลี่ยนเป็นพลังงานไฟฟ้า
เครื่องกำเนิดไฟฟ้าขับเคลื่อนด้วยกังหันผลิตกระแสสลับ
เครื่องกำเนิดไฟฟ้าเชื่อมต่อกับเพลาขับกังหัน มันมีส่วนที่เคลื่อนไหว - โรเตอร์และส่วนคงที่ - สเตเตอร์ พื้นผิวด้านนอกของโรเตอร์ถูกปกคลุมด้วยแม่เหล็กไฟฟ้า พื้นผิวด้านในของสเตเตอร์หรือผนังกระบอกสูบประกอบด้วยขดลวดทองแดง ขณะที่โรเตอร์หมุนภายในสเตเตอร์ อิเล็กตรอนในขดลวดทองแดงจะ "สั่น" การเคลื่อนที่ของพวกมันสร้างกระแสไฟฟ้าคล้ายกับที่เกิดจากการเหนี่ยวนำแม่เหล็กไฟฟ้า แต่มีขนาดใหญ่กว่ามาก
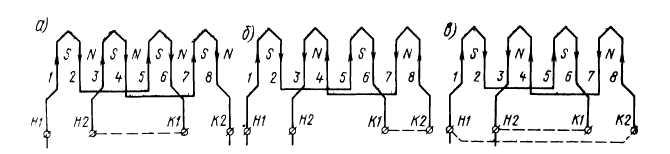
รูปที่ 5.9 แผนภาพอธิบายหลักการของการได้รับโพลสวิตช์
เรียกว่าขั้วสลับได้ ขดลวดสามเฟสได้รับการพัฒนาขึ้นซึ่งสามารถเปลี่ยนเป็นจำนวนคู่ขั้วที่แตกต่างกันในอัตราส่วน: 2:1, 5:2, 7:3, 3:1 เป็นต้น
ให้เราอธิบายหลักการของการสร้างการม้วนแบบโพลสวิตซ์โดยใช้ตัวอย่างการม้วนแบบเฟสเดียวในแปดร่อง ขดลวดประกอบด้วยสองขดลวดครึ่ง หากต่อครึ่งขดลวดเป็นอนุกรมนั่นคือจัมเปอร์จะอยู่ระหว่างขั้ว K 1 และ H 2 (รูปที่ 5.9, a) จากนั้นขดลวดดังกล่าวจะสร้างเสาสี่คู่ (p = 4) จำนวนเสาที่สร้างโดยขดลวดสามารถหาได้โดยการระบุทิศทางของกระแสในนั้นและใช้กฎวงแหวนเพื่อกำหนดทิศทางของเส้นแรงรอบช่อง
กังหันมีความเร็วรอบคงที่
การติดตั้งกังหัน Kaplan ชุดเครื่องกำเนิดไฟฟ้าทั้งหมดในระบบไฟฟ้าจะต้องซิงโครไนซ์ กล่าวอีกนัยหนึ่ง สิ่งสำคัญคือต้องรักษาความเร็วในการหมุนที่แม่นยำ เพื่อให้มั่นใจในคุณภาพไฟฟ้าที่เพียงพอ อุปกรณ์ที่ใช้ไฟฟ้าได้รับการออกแบบให้ใช้กระแสสลับที่ความถี่ที่แน่นอน ความถี่นี้ขึ้นอยู่กับความเร็วในการหมุนของชุดเครื่องกำเนิดไฟฟ้า กล่าวคือ จำนวนครั้งต่อวินาทีที่แม่เหล็กโรเตอร์ผ่านขดลวดสเตเตอร์ ความถี่นี้แสดงเป็นรอบต่อวินาที หรือเฮิรตซ์ ซึ่งตั้งชื่อตามนักฟิสิกส์ชาวเยอรมัน ไฮน์ริช เฮิรตซ์ ผู้พิสูจน์การมีอยู่ของคลื่นวิทยุ
หากขดลวดครึ่งหนึ่งเชื่อมต่อแบบแบ็คทูแบ็กนั่นคือ จัมเปอร์ระหว่างขั้ว K 1 และ K 2 (รูปที่ 9, b) จากนั้นขดลวดดังกล่าวจะสร้างเสาสองคู่ (p \u003d 2) ด้วยทิศทางปัจจุบันที่เลือก ช่องระหว่างช่อง 2 และ 3, 4 และ 5, 6 และ 7, 8 และ 1 จะตัดกัน
ครึ่งขดลวดสามารถเชื่อมต่อแบบ back-to-back เช่น จัมเปอร์ระหว่างขั้ว H 1 และ K 2, H 2 และ K 1 (รูปที่ 9, c) จากนั้นขดลวดจะสร้างเสาสองคู่ (p = 2)
ในอเมริกาเหนือ วงจรไฟฟ้ากระแสสลับมาตรฐานคือ 60 ครั้งต่อวินาที แต่ในยุโรปจะมีความถี่ 50 ครั้งต่อวินาที ซึ่งหมายความว่านาฬิกาที่ออกแบบมาให้ทำงานที่ 60Hz จะช้าลงเมื่อเสียบปลั๊กเข้ากับเต้ารับไฟฟ้าของยุโรป ในการจ่ายกระแสสลับ 60 Hz จะต้องหมุนด้วยความเร็ว 5 รอบต่อนาที นี่คือสูตรที่วิศวกรใช้
วิธีการสตาร์ทเครื่องยนต์
Michael Faraday นักฟิสิกส์และนักเคมีชาวอังกฤษ ค้นพบปรากฏการณ์ของการเหนี่ยวนำ นักวิทยาศาสตร์ได้สร้างกระแสไฟฟ้าขึ้นเป็นครั้งแรกโดยการเคลื่อนแม่เหล็กไปมาภายในขดลวดโลหะ หลักการที่เป็นนวัตกรรมของการค้นพบของฟาราเดย์กำลังถูกนำมาใช้อย่างรวดเร็วและนำมาใช้เพื่อตอบสนองความต้องการด้านการผลิตในยุคอุตสาหกรรม ตามหลักการเหล่านี้ เครื่องกำเนิดไฟฟ้าเครื่องแรกถูกสร้างขึ้น ซึ่งเป็นบรรพบุรุษของหน่วยพลังงานที่ทันสมัย การทดลองของฟาราเดย์กระตุ้นการประดิษฐ์มอเตอร์ไฟฟ้าตัวแรกและหม้อแปลงตัวแรกโดยนักวิจัยคนอื่นๆ
ดังนั้น มีสองวิธีในการเปลี่ยนขดลวดเป็นจำนวนคู่ขั้วที่น้อยกว่าในอัตราส่วน 2:1 วิธีแรกคือการเปลี่ยนจากการเชื่อมต่อแบบอนุกรมของครึ่งขดลวดไปเป็นการเชื่อมต่อแบบป้องกันซีเรียล วิธีที่สองคือการเปลี่ยนจากการเชื่อมต่อแบบอนุกรมเป็นการเชื่อมต่อแบบป้องกันขนาน พิจารณาแต่ละวิธีที่เกี่ยวข้องกับการพันมอเตอร์สามเฟส
ด้วยวิธีการเปลี่ยนครั้งแรก ขดลวดที่เชื่อมต่อด้วยดาวจะต้องมี 9 ขั้วบนโล่ (รูปที่ 5.10, a) และเมื่อเชื่อมต่อด้วยรูปสามเหลี่ยม 12 ขั้ว (รูปที่ 5.10, b) หลังจากเปลี่ยนแล้ว ลักษณะการเชื่อมต่อของขดลวดจะไม่เปลี่ยนแปลง กล่าวคือ ดาวจะเปลี่ยนเป็นดาว และรูปสามเหลี่ยมเป็นรูปสามเหลี่ยม
กำลังของเครื่องยนต์ในวิธีการเปลี่ยนครั้งแรกยังคงที่ ดังนั้นแรงบิดเครื่องยนต์เล็กน้อยและสูงสุดจะเปลี่ยนไป การพิจารณาร่วมกันของคุณสมบัติทางกลของเครื่องยนต์และกลไกต่างๆ (รูปที่ 5.10, c) แสดงให้เห็นว่าวิธีการเปลี่ยนนี้เหมาะสมที่สุดสำหรับการควบคุมความเร็วของเครื่องมือเครื่องตัดโลหะ
ในไดรฟ์ไฟฟ้าทางทะเลของอุปกรณ์รอก กว้าน กว้าน มอเตอร์แบบอะซิงโครนัสสามความเร็วพร้อมขดลวดสามขดลวดแยกกันบนสเตเตอร์สำหรับจำนวนคู่ขั้วที่แตกต่างกัน
ในวิธีการสลับที่สอง ขดลวดที่เชื่อมต่อกับดาวมีเพียง 6 ลีด (รูปที่ 5.11, a) หลังจากสลับแล้วจะได้รับการเชื่อมต่อที่คดเคี้ยวสองดาว กำลังมอเตอร์ในกรณีนี้เพิ่มขึ้นเป็นสองเท่า และแรงบิดที่กำหนดยังคงที่
การพิจารณาร่วมกันของลักษณะทางกลของเครื่องยนต์และกลไกต่างๆ (รูปที่ 5.11, b) แสดงให้เห็นว่าควรใช้วิธีการสลับที่สองเพื่อควบคุมความเร็วในการหมุนของอุปกรณ์ยกน้ำหนัก
หากขดลวดเชื่อมต่อในเดลต้าหลังจากเปลี่ยนตามวิธีที่สองจะได้รับการเชื่อมต่อแบบดับเบิ้ลสตาร์ กำลังเครื่องยนต์เพิ่มขึ้น 15%
วิธีที่ง่ายที่สุดในการสลับขดลวดซึ่งให้ความเร็วสองขั้นตอน ด้วยการสลับขดลวดสามเฟสที่ซับซ้อนยิ่งขึ้น คุณจะได้รับสามหรือสี่ขั้นตอนความเร็วด้วยมากที่สุด อัตราส่วนต่าง ๆ ของเสา ตัวอย่างเช่น มอเตอร์ในประเทศของซีรีย์ MAP ที่มีขดลวดสามเฟสหนึ่งอันมีสามความเร็ว (MAP-42/8-4-2, กำลัง 0.8/1, 8/2 kW, ความเร็วในการหมุน 700/1400/2800 รอบต่อนาที) และสี่ ( MAP-52/8-6-4-2, กำลัง 1.2/2.5/3/4 kW, ความเร็วในการหมุน 460/700/920/1440 rpm). ในทางปฏิบัติไม่มีความเร็วมากกว่าสี่ความเร็วเนื่องจากการม้วนและการสลับนั้นซับซ้อนกว่ามาก เครื่องยนต์ MAP-52/8-6-4-2 มี 22 ลีดบนแผงขั้วต่อ
ในไดรฟ์ไฟฟ้าทางทะเลของอุปกรณ์รอก กว้าน กว้าน มอเตอร์แบบอะซิงโครนัสสามความเร็วพร้อมขดลวดสามขดลวดแยกกันบนสเตเตอร์สำหรับจำนวนคู่ขั้วที่แตกต่างกัน ความถี่ในการหมุน
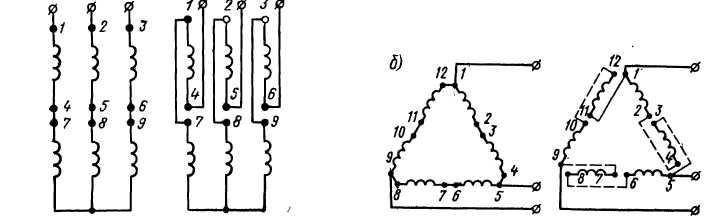
รูปที่ 5.10 วิธีแรกในการเปลี่ยนขดลวดสามเฟสที่เชื่อมต่อด้วยดาว
และรูปสามเหลี่ยมและลักษณะทางกลที่สอดคล้องกันของความดันโลหิต
ถูกควบคุมโดยการเปิดขดลวดอย่างใดอย่างหนึ่ง แต่ตัวม้วนเองไม่เปลี่ยน
อุตสาหกรรมในประเทศผลิตมอเตอร์แบบอะซิงโครนัสแบบหลายความเร็วของซีรีส์ MAP สำหรับไดรฟ์ไฟฟ้าสำหรับเดินทะเล ซึ่งช่วงการควบคุมความเร็วคือ 6:1 หรือ 7:1 ขดลวดความเร็วแรกมักมี 26 หรือ 28 ขั้ว
การควบคุมการสลับขั้วคู่มีความประหยัดสูง เนื่องจากโรเตอร์หมุนด้วยความถี่คงที่โดยมีการลื่นภายในช่วงที่กำหนด และไม่มีตัวต้านทานเพิ่มเติมรวมอยู่ในวงจรมอเตอร์ ข้อเสียอย่างร้ายแรงของวิธีนี้คือการไล่ระดับและความเร็วที่จำกัด
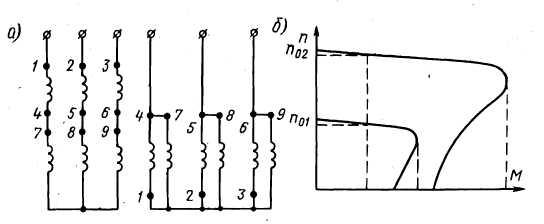
รูปที่ 5.11 วิธีที่สองในการเปลี่ยนขดลวดสามเฟสที่เชื่อมต่อด้วยดาวและ
ลักษณะทางกลที่สอดคล้องกันของมอเตอร์เหนี่ยวนำ
การควบคุมความเร็วในการหมุนโดยการเปลี่ยนความถี่ของกระแสของเครือข่ายอุปทาน (การควบคุมความถี่)
วิธีการควบคุมนี้ขึ้นอยู่กับการเปลี่ยนความเร็วซิงโครนัส n 0 ซึ่งเป็นสัดส่วนกับความถี่ของกระแสในขดลวดสเตเตอร์ ระเบียบนี้ต้องใช้แหล่งจ่ายไฟความถี่ตัวแปร f ใช้ตัวแปลงความถี่แม่เหล็กไฟฟ้าและเซมิคอนดักเตอร์เป็นแหล่งกำเนิด อย่างไรก็ตามต้องระลึกไว้เสมอว่าเมื่อมีการเปลี่ยนแปลงความถี่ของแรงดันไฟฟ้า f แรงบิดแม่เหล็กไฟฟ้าสูงสุดของมอเตอร์จะเปลี่ยนไป ดังนั้น เพื่อรักษาความสามารถในการโอเวอร์โหลด ตัวประกอบกำลัง และประสิทธิภาพของมอเตอร์ในระดับที่ต้องการ จำเป็นต้องเปลี่ยนแรงดันไฟหลัก U พร้อมกันด้วยการเปลี่ยนความถี่ f เพื่อให้อัตราส่วนคงที่:
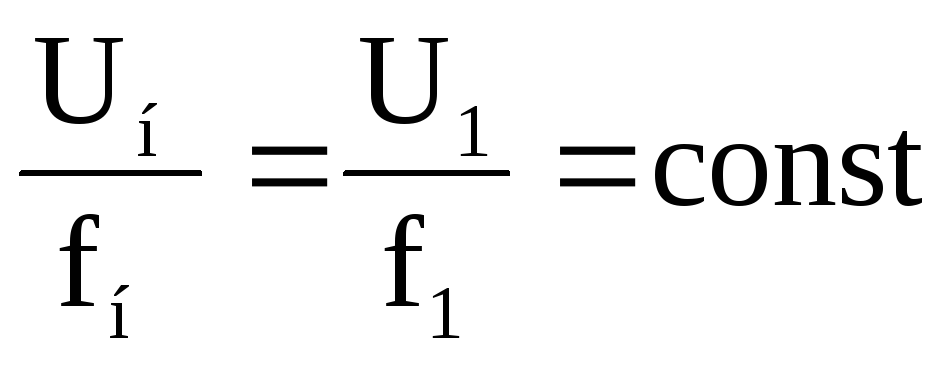
 ;
;
การควบคุมความถี่ช่วยให้คุณเปลี่ยนความเร็วของเครื่องยนต์ได้อย่างราบรื่นในช่วงกว้าง (สูงสุด 12:1)
การควบคุมความเร็วด้วยการเปลี่ยนความถี่ปัจจุบันเป็นวิธีที่สมเหตุสมผลและประหยัดที่สุด ข้อดีหลัก:
ใช้มอเตอร์กรงกระรอกธรรมดา
การควบคุมในแง่ของการสูญเสียมอเตอร์นั้นประหยัด
มีการควบคุมที่หลากหลายและราบรื่น
ความแข็งแกร่งของคุณสมบัติทางกลยังคงรักษาเสถียรภาพของตัวขับ
การเบรกแบบสร้างใหม่สามารถทำได้เกือบจนหยุดสนิท
ในเวลาเดียวกัน เป็นที่ทราบกันดีว่าความถี่ปัจจุบันของโรงไฟฟ้าของเรือรบนั้นคงที่และต้องใช้ตัวแปลงความถี่แยกต่างหากเพื่อควบคุมความเร็วของเครื่องยนต์
ไดรฟ์ไฟฟ้าที่ควบคุมด้วยความถี่ที่ทันสมัยประกอบด้วยมอเตอร์ไฟฟ้าแบบอะซิงโครนัสหรือซิงโครนัสและตัวแปลงความถี่ (รูปที่ 5.12)
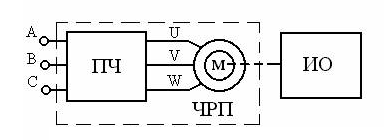
รูปที่ 5.12 ไดรฟ์ความถี่ตัวแปร
ตัวแปลงความถี่ขับเคลื่อนมอเตอร์ไฟฟ้าและเป็นอุปกรณ์ไฟฟ้าสถิตย์แบบอิเล็กทรอนิกส์ แรงดันไฟฟ้าที่มีแอมพลิจูดและความถี่แปรผันจะถูกสร้างขึ้นที่เอาต์พุตของคอนเวอร์เตอร์ ชื่อ "ไดรฟ์ไฟฟ้าความถี่ตัวแปร" เกิดจากการที่การควบคุมความเร็วของมอเตอร์ดำเนินการโดยการเปลี่ยนความถี่ของแรงดันไฟฟ้าที่จ่ายให้กับมอเตอร์จากเครื่องแปลงความถี่
ในช่วงหลายปีที่ผ่านมา มีการเปิดตัวไดรฟ์ไฟฟ้าแบบควบคุมความถี่บนเรืออย่างแพร่หลายและประสบความสำเร็จ ทั้งสำหรับการแก้ปัญหาทางเทคโนโลยีต่างๆ และในระบบขับเคลื่อนด้วยไฟฟ้า สาเหตุหลักมาจากการพัฒนาและการสร้างตัวแปลงความถี่โดยใช้องค์ประกอบพื้นฐานใหม่ ซึ่งส่วนใหญ่ใช้ทรานซิสเตอร์สองขั้วเกทที่หุ้มฉนวน IGBT
ในมอเตอร์ไฟฟ้าแบบซิงโครนัส ความเร็วของโรเตอร์ในสภาวะคงตัวจะเท่ากับความเร็วของสนามแม่เหล็กของสเตเตอร์
ในมอเตอร์ไฟฟ้าแบบอะซิงโครนัส ความเร็วของโรเตอร์ในสถานะคงตัวจะแตกต่างจากความเร็วตามปริมาณการลื่น
ความถี่ของการหมุนของสนามแม่เหล็กขึ้นอยู่กับความถี่ของแรงดันไฟฟ้า เมื่อขดลวดสเตเตอร์ของมอเตอร์ไฟฟ้ามีแรงดันไฟฟ้าสามเฟสที่มีความถี่ สนามแม่เหล็กหมุนจะถูกสร้างขึ้น ความเร็วในการหมุนของฟิลด์นี้ถูกกำหนดโดยสูตรที่รู้จักกันดี
ที่ไหน คือจำนวนคู่ของเสาสเตเตอร์
การเปลี่ยนจากความเร็วการหมุนของสนามซึ่งวัดเป็นเรเดียนเป็นความถี่การหมุนซึ่งแสดงเป็นรอบต่อนาทีนั้นดำเนินการตามสูตรต่อไปนี้
โดยที่ 60 คือปัจจัยการแปลงมิติ
แทนที่ความเร็วการหมุนของสนามในสมการนี้ เราจะได้ว่า
ดังนั้นความเร็วของโรเตอร์ของมอเตอร์ซิงโครนัสและอะซิงโครนัสจึงขึ้นอยู่กับความถี่ของแรงดันไฟฟ้า
วิธีการควบคุมความถี่ขึ้นอยู่กับการพึ่งพานี้
โดยการเปลี่ยนความถี่ด้วยคอนเวอร์เตอร์ ที่ทางเข้าของมอเตอร์เราปรับความเร็วของโรเตอร์
ในไดรฟ์ที่ควบคุมความถี่โดยทั่วไปซึ่งใช้มอเตอร์กรงกระรอกแบบอะซิงโครนัสจะใช้การควบคุมความถี่แบบสเกลาร์และเวกเตอร์
ด้วยการควบคุมสเกลาร์ตามกฎหมายบางประการจะเปลี่ยนแอมพลิจูดและความถี่ของแรงดันไฟฟ้าที่ใช้กับมอเตอร์ การเปลี่ยนแปลงความถี่ของแรงดันไฟฟ้าทำให้เกิดการเบี่ยงเบนจากค่าที่คำนวณได้ของแรงบิดสูงสุดและเริ่มต้นของมอเตอร์ ประสิทธิภาพ ตัวประกอบกำลัง ดังนั้น เพื่อรักษาลักษณะการทำงานที่ต้องการของเครื่องยนต์ จึงจำเป็นต้องเปลี่ยนแอมพลิจูดของแรงดันไฟฟ้าพร้อมๆ กันด้วยการเปลี่ยนแปลงความถี่
ในตัวแปลงความถี่ที่มีอยู่ซึ่งมีการควบคุมสเกลาร์ อัตราส่วนของแรงบิดมอเตอร์สูงสุดต่อโมเมนต์ความต้านทานบนเพลามักจะคงที่ นั่นคือเมื่อความถี่เปลี่ยนแปลง แอมพลิจูดของแรงดันไฟฟ้าจะเปลี่ยนในลักษณะที่อัตราส่วนของแรงบิดสูงสุดของมอเตอร์ต่อแรงบิดของโหลดปัจจุบันยังคงไม่เปลี่ยนแปลง อัตราส่วนนี้เรียกว่าความจุเกินของมอเตอร์
ด้วยความจุโอเวอร์โหลดคงที่ ตัวประกอบกำลังและประสิทธิภาพที่กำหนด เครื่องยนต์ตลอดช่วงการควบคุมความเร็วแทบไม่เปลี่ยนแปลง
แรงบิดสูงสุดที่พัฒนาโดยเครื่องยนต์ถูกกำหนดโดยความสัมพันธ์ต่อไปนี้
โดยที่สัมประสิทธิ์คงที่
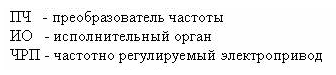
ดังนั้นการพึ่งพาแรงดันไฟฟ้าในความถี่จึงพิจารณาจากลักษณะของโหลดบนเพลาของมอเตอร์ไฟฟ้า
สำหรับแรงบิดโหลดคงที่ อัตราส่วน U/f = const จะคงอยู่ และตามจริงแล้ว แรงบิดสูงสุดของมอเตอร์จะคงที่ ลักษณะของการพึ่งพาแรงดันไฟฟ้าที่ความถี่สำหรับเคสที่มีแรงบิดโหลดคงที่แสดงในรูปที่ 5.13(ก) มุมเอียงของเส้นตรงบนกราฟขึ้นอยู่กับค่าของโมเมนต์ความต้านทานและแรงบิดสูงสุดของเครื่องยนต์
ในเวลาเดียวกัน ที่ความถี่ต่ำ เริ่มจากค่าความถี่หนึ่ง แรงบิดสูงสุดของมอเตอร์เริ่มลดลง เพื่อชดเชยสิ่งนี้และเพิ่มแรงบิดเริ่มต้น ระดับแรงดันไฟฟ้าของแหล่งจ่ายจะถูกใช้เพิ่มขึ้น
ในกรณีของโหลดของพัดลม การพึ่งพา U/f 2 = const จะเกิดขึ้น ลักษณะของการพึ่งพาแรงดันไฟฟ้าของความถี่สำหรับกรณีนี้แสดงในรูปที่ 5.13 (b)
รูปที่ 5.13 ลักษณะการพึ่งพาแรงดันไฟฟ้าของความถี่ของเคส:
a) ด้วยแรงบิดโหลดคงที่
b) ด้วยแรงบิดโหลดของพัดลม
เมื่อทำการควบคุมในพื้นที่ความถี่ต่ำ แรงบิดสูงสุดก็ลดลงเช่นกัน แต่สำหรับโหลดประเภทนี้ ไม่สำคัญ
การใช้แรงบิดสูงสุดขึ้นอยู่กับแรงดันและความถี่ เป็นไปได้ที่จะพล็อต U เทียบกับ f สำหรับโหลดประเภทใดก็ได้
ข้อได้เปรียบที่สำคัญของวิธีสเกลาร์คือความเป็นไปได้ของการควบคุมกลุ่มมอเตอร์ไฟฟ้าพร้อมกัน
การควบคุมสเกลาร์นั้นเพียงพอสำหรับการใช้งานในทางปฏิบัติส่วนใหญ่ของไดรฟ์ความถี่ตัวแปรที่มีช่วงการควบคุมความเร็วมอเตอร์สูงถึง 1:40
การควบคุมเวกเตอร์ช่วยให้คุณเพิ่มช่วงการควบคุม ควบคุมความแม่นยำ เพิ่มความเร็วของไดรฟ์ไฟฟ้าได้อย่างมาก วิธีนี้ให้การควบคุมแรงบิดของมอเตอร์โดยตรง
แรงบิดถูกกำหนดโดยกระแสสเตเตอร์ซึ่งสร้างสนามแม่เหล็กที่น่าตื่นเต้น ด้วยการควบคุมแรงบิดโดยตรง จำเป็นต้องเปลี่ยนนอกเหนือจากแอมพลิจูดและเฟสของกระแสสเตเตอร์นั่นคือเวกเตอร์ปัจจุบัน นี่คือเหตุผลของคำว่า "การควบคุมเวกเตอร์"
เพื่อควบคุมเวกเตอร์ปัจจุบัน และด้วยเหตุนี้ ตำแหน่งของฟลักซ์แม่เหล็กของสเตเตอร์ที่สัมพันธ์กับโรเตอร์ที่หมุนอยู่ จำเป็นต้องทราบตำแหน่งที่แน่นอนของโรเตอร์เมื่อใดก็ได้ ปัญหาได้รับการแก้ไขด้วยความช่วยเหลือของเซ็นเซอร์ตำแหน่งโรเตอร์ระยะไกลหรือโดยการกำหนดตำแหน่งของโรเตอร์โดยการคำนวณพารามิเตอร์เครื่องยนต์อื่น ๆ กระแสและแรงดันไฟฟ้าของขดลวดสเตเตอร์ใช้เป็นพารามิเตอร์เหล่านี้
VFD ที่มีการควบคุมเวกเตอร์โดยไม่มีเซ็นเซอร์ป้อนกลับความเร็วมีราคาไม่แพง แต่การควบคุมเวกเตอร์ต้องใช้การคำนวณจำนวนมากและความเร็วสูงจากตัวแปลงความถี่
นอกจากนี้ สำหรับการควบคุมแรงบิดโดยตรงที่ความเร็วต่ำหรือใกล้เคียงกับความเร็วการหมุนเป็นศูนย์ การทำงานของไดรฟ์ไฟฟ้าที่ควบคุมความถี่โดยไม่มีการตอบสนองความเร็วนั้นเป็นไปไม่ได้
การควบคุมเวกเตอร์ด้วยเซ็นเซอร์ป้อนกลับความเร็วให้ช่วงการควบคุมสูงถึง 1:1000 และสูงกว่า ความแม่นยำในการควบคุมความเร็ว - หนึ่งในร้อยเปอร์เซ็นต์ ความแม่นยำของแรงบิด - สองสามเปอร์เซ็นต์
ตัวแปลงความถี่เป็นอุปกรณ์ที่ออกแบบมาเพื่อแปลงกระแสสลับ (แรงดัน) ของความถี่หนึ่งเป็นกระแสสลับ (แรงดัน) ของความถี่อื่น
ความถี่เอาต์พุตในตัวแปลงที่ทันสมัยสามารถเปลี่ยนแปลงได้หลากหลายและทั้งสูงและต่ำกว่าความถี่ไฟหลัก
วงจรของตัวแปลงความถี่ใด ๆ ประกอบด้วยส่วนกำลังและส่วนควบคุม ส่วนกำลังของตัวแปลงมักจะทำกับไทริสเตอร์หรือทรานซิสเตอร์ที่ทำงานในโหมดสวิตช์อิเล็กทรอนิกส์ ส่วนควบคุมทำงานบนไมโครโปรเซสเซอร์แบบดิจิทัลและให้การควบคุมคีย์อิเล็กทรอนิกส์กำลัง ตลอดจนการแก้ไขงานเสริมจำนวนมาก (การควบคุม การวินิจฉัย การป้องกัน)
ตัวแปลงความถี่ที่ใช้ในไดรฟ์ไฟฟ้าควบคุมขึ้นอยู่กับโครงสร้างและหลักการทำงานของหน่วยพลังงานแบ่งออกเป็นสองประเภท:
1. ตัวแปลงความถี่พร้อมลิงค์ DC ระดับกลางที่เด่นชัด
2. ตัวแปลงความถี่พร้อมการเชื่อมต่อโดยตรง (ไม่มีลิงค์ DC ระดับกลาง)
คอนเวอร์เตอร์แต่ละคลาสที่มีอยู่มีข้อดีและข้อเสียของตัวเองซึ่งกำหนดพื้นที่ของการใช้งานอย่างมีเหตุผลของแต่ละคอนเวอร์เตอร์
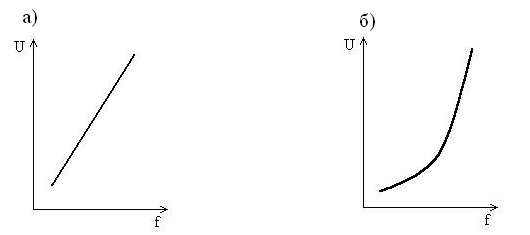
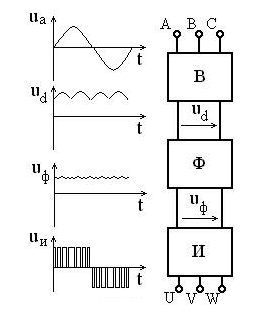
สำหรับคอนเวอร์เตอร์ที่มีการเชื่อมต่อโดยตรง (รูปที่ 5.14) ส่วนกำลังจะเป็นวงจรเรียงกระแสแบบควบคุมและสร้างขึ้นบนไทริสเตอร์ที่ไม่สามารถล็อคได้ ระบบควบคุมจะปลดล็อกกลุ่มของไทริสเตอร์และเชื่อมต่อขดลวดสเตเตอร์ของมอเตอร์กับแหล่งจ่ายไฟหลัก
ข้าว. 5.14 ตัวแปลงความถี่พร้อมการเชื่อมต่อโดยตรง
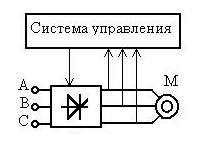
ดังนั้นแรงดันเอาต์พุตของคอนเวอร์เตอร์จึงเกิดขึ้นจากส่วน "ตัด" ของไซนัสอยด์ของแรงดันอินพุต รูปที่ 5.15 แสดงตัวอย่างการสร้างแรงดันไฟขาออกสำหรับเฟสโหลดอย่างใดอย่างหนึ่ง
รูปที่ 5.15 การก่อตัวของแรงดันเอาต์พุตสำหรับเฟสหนึ่งของโหลด
แรงดันไฟฟ้าไซน์สามเฟส u a, u v, u s ทำหน้าที่ที่อินพุตของตัวแปลง แรงดันไฟขาออกที่ออกมามีรูปร่าง "ฟันเลื่อย" ที่ไม่ใช่ไซนัส ซึ่งสามารถประมาณแบบมีเงื่อนไขได้ด้วยไซนัส (เส้นหนา) จากรูปจะเห็นได้ว่าความถี่ของแรงดันไฟขาออกต้องไม่เท่ากับหรือสูงกว่าความถี่ของเครือข่ายอุปทาน อยู่ในช่วง 0 ถึง 30 Hz ส่งผลให้ควบคุมความเร็วรอบเครื่องยนต์ได้น้อย (ไม่เกิน 1: 10) ข้อจำกัดนี้ไม่อนุญาตให้ใช้ตัวแปลงดังกล่าวในไดรฟ์ที่ควบคุมความถี่ที่ทันสมัยพร้อมการควบคุมพารามิเตอร์ทางเทคโนโลยีที่หลากหลาย
การใช้ไทริสเตอร์ที่ไม่สามารถล็อคได้ต้องใช้ระบบควบคุมที่ค่อนข้างซับซ้อนซึ่งจะเป็นการเพิ่มต้นทุนของคอนเวอร์เตอร์
คลื่นไซน์ "ตัด" ที่เอาต์พุตของคอนเวอร์เตอร์เป็นแหล่งของฮาร์โมนิกที่สูงขึ้น ซึ่งทำให้เกิดการสูญเสียเพิ่มเติมในมอเตอร์ไฟฟ้า ความร้อนสูงเกินไปของเครื่องไฟฟ้า การลดแรงบิด และการรบกวนที่รุนแรงมากในเครือข่ายอุปทาน การใช้อุปกรณ์ชดเชยจะทำให้ต้นทุน น้ำหนัก ขนาด และประสิทธิภาพลดลง ระบบโดยรวม
นอกจากข้อบกพร่องที่ระบุไว้ของตัวแปลงแบบคู่ขนานแล้ว พวกมันยังมีข้อดีบางประการ ซึ่งรวมถึง:
ประสิทธิภาพสูงสุดในทางปฏิบัติเมื่อเทียบกับตัวแปลงอื่น ๆ (98.5% ขึ้นไป)
ความสามารถในการทำงานกับแรงดันไฟฟ้าและกระแสไฟสูง ซึ่งทำให้สามารถใช้งานได้ในไดรฟ์ไฟฟ้าแรงสูงอันทรงพลัง
ค่อนข้างถูกแม้จะมีต้นทุนที่แน่นอนเพิ่มขึ้นเนื่องจากวงจรควบคุมและอุปกรณ์เพิ่มเติม
วงจรคอนเวอร์เตอร์ที่คล้ายกันนี้ใช้ในไดรฟ์รุ่นเก่าและแทบไม่มีการพัฒนาการออกแบบใหม่เลย
ตัวแปลงความถี่ที่ใช้กันอย่างแพร่หลายในปัจจุบันคือตัวแปลงที่มีลิงก์ DC ที่เด่นชัด (รูปที่ 5.16)
ตัวแปลงของคลาสนี้ใช้การแปลงพลังงานไฟฟ้าเป็นสองเท่า: แรงดันไฟฟ้าไซน์อินพุทที่มีแอมพลิจูดและความถี่คงที่จะถูกแก้ไขในวงจรเรียงกระแส (V) กรองโดยตัวกรอง (F) ทำให้เรียบแล้วแปลงใหม่โดยอินเวอร์เตอร์ (I ) เป็นแรงดันไฟฟ้าสลับของความถี่ตัวแปรและแอมพลิจูด การแปลงพลังงานสองเท่าทำให้ประสิทธิภาพลดลง และการเสื่อมสภาพของตัวบ่งชี้น้ำหนักและขนาดที่เกี่ยวข้องกับคอนเวอร์เตอร์ที่มีการเชื่อมต่อโดยตรง
รูป 5.16 ตัวแปลงความถี่พร้อม DC link
ในการสร้างแรงดันไฟฟ้ากระแสสลับแบบไซน์ จะใช้อินเวอร์เตอร์แรงดันไฟอัตโนมัติและอินเวอร์เตอร์กระแสไฟอัตโนมัติ
ในฐานะที่เป็นสวิตช์อิเล็กทรอนิกส์ในอินเวอร์เตอร์ ไทริสเตอร์ที่ล็อคได้ GTO และการดัดแปลงขั้นสูงของ GCT, IGCT, SGCT และทรานซิสเตอร์สองขั้วเกทหุ้มฉนวน IGBT ถูกนำมาใช้
ข้อได้เปรียบหลักของตัวแปลงความถี่ไทริสเตอร์เช่นเดียวกับวงจรแบบคู่ขนานคือความสามารถในการทำงานกับกระแสและแรงดันไฟฟ้าสูง ในขณะที่ทนต่อโหลดต่อเนื่องและผลกระทบจากแรงกระตุ้น
มีประสิทธิภาพสูงขึ้น (สูงถึง 98%) เมื่อเทียบกับคอนเวอร์เตอร์บนทรานซิสเตอร์ IGBT (95 - 98%)
ตัวแปลงความถี่ที่ใช้ไทริสเตอร์ในปัจจุบันครอบครองตำแหน่งที่โดดเด่นในไดรฟ์ไฟฟ้าแรงสูงในช่วงกำลังตั้งแต่หลายร้อยกิโลวัตต์จนถึงหลายสิบเมกะวัตต์ที่มีแรงดันเอาต์พุต 3-10 kV และสูงกว่า อย่างไรก็ตาม ราคาต่อกิโลวัตต์ของกำลังขับสูงที่สุดในกลุ่มของตัวแปลงไฟฟ้าแรงสูง
จนกระทั่งเมื่อไม่นานมานี้ เครื่องแปลงความถี่บน GTO เป็นส่วนแบ่งหลักในไดรฟ์ความถี่ตัวแปรแรงดันต่ำ แต่ด้วยการถือกำเนิดของทรานซิสเตอร์ IGBT ทำให้เกิด "การคัดเลือกโดยธรรมชาติ" และในปัจจุบันตัวแปลงที่ยึดตามพวกมันนั้นเป็นผู้นำที่ได้รับการยอมรับโดยทั่วไปในด้านไดรฟ์ความถี่ตัวแปรแรงดันต่ำ
ไทริสเตอร์เป็นอุปกรณ์กึ่งควบคุม: ในการเปิดใช้งานก็เพียงพอที่จะใช้พัลส์สั้น ๆ กับเอาต์พุตควบคุม แต่หากต้องการปิดคุณต้องใช้แรงดันย้อนกลับกับมันหรือลดกระแสสวิตช์เป็นศูนย์ สิ่งนี้ต้องการระบบควบคุมที่ซับซ้อนและยุ่งยากในตัวแปลงความถี่ไทริสเตอร์
ทรานซิสเตอร์สองขั้วเกทฉนวน IGBT แตกต่างจากการควบคุมไทริสเตอร์เต็มรูปแบบ ระบบควบคุมพลังงานต่ำอย่างง่าย ความถี่การทำงานสูงสุด
ด้วยเหตุนี้ ตัวแปลงความถี่แบบ IGBT ทำให้สามารถขยายช่วงของการควบคุมความเร็วมอเตอร์และเพิ่มความเร็วของไดรฟ์โดยรวมได้
สำหรับไดรฟ์ควบคุมแบบอะซิงโครนัสเวกเตอร์ ตัวแปลง IGBT อนุญาตให้ทำงานที่ความเร็วต่ำโดยไม่มีเซ็นเซอร์ป้อนกลับ
การใช้ IGBT ที่มีความถี่สวิตชิ่งที่สูงขึ้นร่วมกับระบบควบคุมไมโครโปรเซสเซอร์ในตัวแปลงความถี่จะลดระดับของคุณลักษณะฮาร์มอนิกที่สูงขึ้นของตัวแปลงไทริสเตอร์ เป็นผลให้มีการสูญเสียเพิ่มเติมน้อยลงในขดลวดและวงจรแม่เหล็กของมอเตอร์ไฟฟ้า, ความร้อนที่ลดลงของเครื่องไฟฟ้า, แรงบิดกระเพื่อมที่ลดลงและการยกเว้นของที่เรียกว่า "การเดิน" ของโรเตอร์ ในเขตความถี่ต่ำ การสูญเสียในหม้อแปลง, ธนาคารตัวเก็บประจุจะลดลง, อายุการใช้งานและฉนวนลวดเพิ่มขึ้น, จำนวนสัญญาณเตือนที่ผิดพลาดของอุปกรณ์ป้องกันและข้อผิดพลาดของเครื่องมือวัดการเหนี่ยวนำจะลดลง
คอนเวอร์เตอร์ที่ใช้ทรานซิสเตอร์ IGBT เมื่อเปรียบเทียบกับคอนเวอร์เตอร์ไทริสเตอร์ที่มีกำลังขับเท่ากันนั้นมีขนาดเล็กกว่า น้ำหนัก ความน่าเชื่อถือเพิ่มขึ้นเนื่องจากการออกแบบโมดูลาร์ของสวิตช์อิเล็กทรอนิกส์ การระบายความร้อนที่ดีขึ้นจากพื้นผิวโมดูล และองค์ประกอบโครงสร้างน้อยลง
ช่วยป้องกันกระแสไฟกระชากและแรงดันไฟเกินได้อย่างสมบูรณ์ยิ่งขึ้น ซึ่งช่วยลดโอกาสที่ไดรฟ์จะล้มเหลวและเกิดความเสียหายได้อย่างมาก
ในขณะนี้ ตัวแปลง IGBT แรงดันต่ำมีราคาต่อหน่วยของกำลังขับที่สูงขึ้น เนื่องจากความซับซ้อนสัมพัทธ์ของการผลิตโมดูลทรานซิสเตอร์ อย่างไรก็ตาม ในแง่ของอัตราส่วนราคา/คุณภาพ ตามข้อดีที่ระบุไว้ พวกมันมีประสิทธิภาพเหนือกว่าตัวแปลงไทริสเตอร์อย่างชัดเจน นอกจากนี้ ในช่วงหลายปีที่ผ่านมา ราคาโมดูล IGBT ลดลงอย่างต่อเนื่อง
อุปสรรคหลักของการใช้งานในไดรฟ์ไฟฟ้าแรงสูงที่มีการแปลงความถี่โดยตรงและกำลังสูงกว่า 1 - 2 เมกะวัตต์ในขณะนี้คือข้อจำกัดทางเทคโนโลยี การเพิ่มขึ้นของแรงดันไฟสวิตชิ่งและกระแสไฟในการทำงานทำให้ขนาดของโมดูลทรานซิสเตอร์เพิ่มขึ้น และยังต้องการการกำจัดความร้อนที่มีประสิทธิภาพมากขึ้นจากคริสตัลซิลิคอน
เทคโนโลยีใหม่สำหรับการผลิตทรานซิสเตอร์แบบไบโพลาร์มีจุดมุ่งหมายเพื่อเอาชนะข้อจำกัดเหล่านี้ และสัญญาในการใช้ IGBT ก็สูงมากเช่นกันในไดรฟ์ไฟฟ้าแรงสูง ปัจจุบันทรานซิสเตอร์ IGBT ใช้ในคอนเวอร์เตอร์ไฟฟ้าแรงสูงในรูปแบบของโมดูลเดี่ยวหลายโมดูลที่เชื่อมต่อแบบอนุกรม
แผนภาพทั่วไปของตัวแปลงความถี่ IGBT แรงดันต่ำแสดงในรูปที่ 5.17 ที่ด้านล่างของรูปคือกราฟของแรงดันและกระแสที่เอาต์พุตของแต่ละองค์ประกอบของคอนเวอร์เตอร์
แรงดันไฟฟ้าสลับของเครือข่ายอุปทาน (u in) ที่มีแอมพลิจูดและความถี่คงที่ (U ใน = const, f ใน = const) ถูกจ่ายให้กับวงจรเรียงกระแสแบบควบคุมหรือไม่มีการควบคุม (1)
ตัวกรอง (2) ใช้เพื่อปรับระลอกคลื่นของแรงดันไฟฟ้าที่แก้ไขให้เรียบ (u rect.) วงจรเรียงกระแสและตัวกรองตัวเก็บประจุ (2) สร้างลิงก์ DC
จากเอาต์พุตของตัวกรอง แรงดันคงที่ u d จะถูกป้อนไปยังอินพุตของอินเวอร์เตอร์พัลส์อิสระ (3)
อินเวอร์เตอร์อัตโนมัติของตัวแปลงแรงดันต่ำที่ทันสมัยตามที่ระบุไว้นั้นใช้ทรานซิสเตอร์แบบไบโพลาร์แบบกำลังไฟฟ้าที่มีเกท IGBT ที่หุ้มฉนวน รูปที่เป็นปัญหาแสดงวงจรแปลงความถี่ที่มีอินเวอร์เตอร์แรงดันไฟอัตโนมัติซึ่งใช้กันอย่างแพร่หลายมากที่สุด
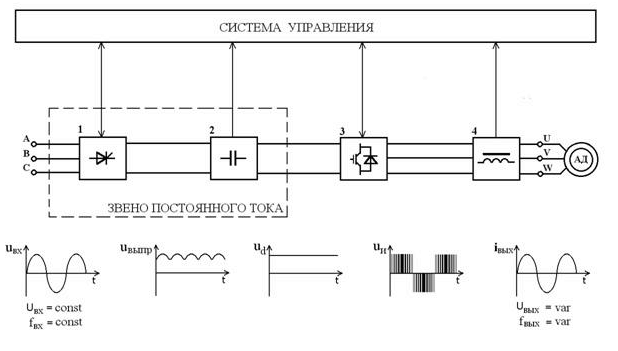
ข้าว. 5.17 วงจรแปลงความถี่ IGBT ทั่วไป
อินเวอร์เตอร์แปลงแรงดันไฟฟ้ากระแสตรง ยู d เป็นแรงดันอิมพัลส์สามเฟส (หรือเฟสเดียว) u และแอมพลิจูดและความถี่แปรผัน ตามสัญญาณของระบบควบคุม ขดลวดแต่ละอันของมอเตอร์ไฟฟ้าเชื่อมต่อผ่านทรานซิสเตอร์กำลังไฟฟ้าที่สอดคล้องกันของอินเวอร์เตอร์กับขั้วบวกและขั้วลบของลิงค์ DC ระยะเวลาของการเชื่อมต่อของขดลวดแต่ละอันภายในระยะเวลาการทำซ้ำของพัลส์จะถูกปรับตามกฎไซน์ ความกว้างพัลส์ที่ใหญ่ที่สุดมีให้ในช่วงกลางของครึ่งรอบ และลดลงในช่วงเริ่มต้นและสิ้นสุดของครึ่งรอบ ดังนั้นระบบควบคุมจึงให้การมอดูเลตความกว้างพัลส์ (PWM) ของแรงดันไฟฟ้าที่ใช้กับขดลวดของมอเตอร์ แอมพลิจูดและความถี่ของแรงดันไฟฟ้าถูกกำหนดโดยพารามิเตอร์ของฟังก์ชันมอดูเลตไซน์
ที่ความถี่พาหะของ PWM สูง (2 ... 15 kHz) ขดลวดมอเตอร์ทำหน้าที่เป็นตัวกรองเนื่องจากการเหนี่ยวนำสูง ดังนั้นกระแสไซน์เกือบจะไหลในตัวพวกมัน
ในวงจรของคอนเวอร์เตอร์ที่มีวงจรเรียงกระแสควบคุม (1) การเปลี่ยนแปลงของแอมพลิจูดแรงดัน ยูและสามารถทำได้โดยการควบคุมขนาดของแรงดันคงที่ ยู d และการเปลี่ยนแปลงความถี่เป็นโหมดการทำงานของอินเวอร์เตอร์
หากจำเป็น จะมีการติดตั้งตัวกรอง (4) ที่เอาต์พุตของอินเวอร์เตอร์อัตโนมัติเพื่อให้คลื่นกระแสน้ำไหลออกเรียบ (ในวงจรตัวแปลง IGBT เนื่องจากฮาร์โมนิกในระดับต่ำในแรงดันเอาต์พุต แทบไม่จำเป็นต้องมีตัวกรอง)
ดังนั้นแรงดันไฟฟ้าสลับสามเฟส (หรือเฟสเดียว) ของความถี่ตัวแปรและแอมพลิจูดจะเกิดขึ้นที่เอาต์พุตของตัวแปลงความถี่ (U out = var, f out = var)
บ่อยครั้งที่จำเป็นต้องลดความเร็วในการหมุนของเครื่องยนต์ที่ทำงานบางอย่างในกลไก การลดจำนวนรอบของมอเตอร์ไฟฟ้าสามารถทำได้ด้วยความช่วยเหลือของวงจรควบคุมมาตรฐานที่ผลิตขึ้น
มอเตอร์ไฟฟ้ากระแสสลับมักใช้ในกิจกรรมของมนุษย์ เครื่องจักรงานโลหะ การขนส่ง กลไกเครน และอุปกรณ์อื่นๆ มอเตอร์แปลงพลังงานของแหล่งจ่ายกระแสสลับเป็นการหมุนของเพลาและหน่วย ส่วนใหญ่จะใช้มอเตอร์แบบอะซิงโครนัส AC
โรเตอร์เช่นเดียวกับสเตเตอร์ของมอเตอร์ประกอบด้วยขดลวดที่วางอยู่ในแกนที่ทำจากเหล็กพิเศษ การจำแนกประเภทของมอเตอร์ไฟฟ้าตามวิธีการพันขดลวด
แกนขดลวดทองเหลืองและทองแดงถูกสอดเข้าไปในแกนและติดตั้งวงแหวนตามขอบ ขดลวดดังกล่าวเรียกว่าโรเตอร์กรงกระรอก (CS) มอเตอร์ไฟฟ้าขนาดเล็กมีแท่งและดิสก์ที่หล่อเข้าด้วยกัน สำหรับมอเตอร์ไฟฟ้าที่มีแรงบิดสูง ชิ้นส่วนจะถูกหล่อแยกจากกันและเชื่อมเข้าด้วยกัน ขดลวดสเตเตอร์สามารถเชื่อมต่อได้สองวิธี: เดลต้า, สตาร์
เฟสโรเตอร์ประกอบด้วยขดลวดโรเตอร์ 3 เฟสที่เชื่อมต่อด้วยวงแหวนสลิปและแปรงกับแหล่งจ่ายไฟ คดเคี้ยวเชื่อมต่อด้วย "ดาว"

การคำนวณจำนวนรอบของมอเตอร์เหนี่ยวนำ
มอเตอร์ทั่วไปในเครื่องมือกลและอุปกรณ์ยกคือมอเตอร์แบบกรงกระรอก ดังนั้นควรนำตัวอย่างการคำนวณมาใช้ แรงดันไฟหลักถูกจ่ายให้กับขดลวดสเตเตอร์ ขดลวดจะถูกชดเชยจากกัน 120 องศา สนามที่เกิดขึ้นใหม่ของการเหนี่ยวนำแม่เหล็กไฟฟ้ากระตุ้นกระแสไฟฟ้าในขดลวด โรเตอร์เริ่มทำงานภายใต้อิทธิพลของ EMC
ลักษณะสำคัญของเครื่องยนต์คือจำนวนรอบต่อนาที ลองคำนวณค่านี้:
n = 60 f/p, รอบต่อนาที;
โดยที่ f คือความถี่เครือข่าย เฮิรตซ์ p คือจำนวนเสาสเตเตอร์ (เป็นคู่)
มีป้ายบอกพิกัดที่ตัวเรือนมอเตอร์ หากไม่มี คุณสามารถคำนวณจำนวนรอบของเพลาอุปกรณ์ได้ด้วยตนเองโดยใช้ข้อมูลอื่นๆ ที่มี การคำนวณทำได้สามวิธี
- การคำนวณจำนวนคอยส์ซึ่งเปรียบเทียบกับบรรทัดฐานสำหรับแรงดันไฟฟ้าที่ต่างกัน ดังต่อไปนี้จากตาราง:

- การคำนวณความเร็วของงานตามขั้นตอนของเส้นผ่านศูนย์กลางที่คดเคี้ยวตามสูตร:
2 p \u003d Z 1 / y โดยที่ 2p คือจำนวนเสา Z 1 คือจำนวนช่องในสเตเตอร์ y คือสนามที่คดเคี้ยว
เราเลือกความเร็วเครื่องยนต์ที่เหมาะสมจากตาราง:

- เราคำนวณจำนวนขั้วตามพารามิเตอร์ของแกนโดยใช้สูตร:
2p = 0.35 Z 1 b / h หรือ 2 p = 0.5 D i / h
โดยที่ 2p คือจำนวนเสา, Z 1 คือจำนวนร่อง, b คือขนาดของฟัน, cm, h คือความสูงของด้านหลัง, cm, D i คือเส้นผ่านศูนย์กลางของฟัน, ซม.
จากผลการคำนวณและการเหนี่ยวนำ จำนวนรอบของขดลวดจะตามมา และเปรียบเทียบกับค่าของมอเตอร์ตามหนังสือเดินทาง
จะเปลี่ยนความเร็วของเครื่องยนต์ได้อย่างไร?
คุณสามารถเปลี่ยนความเร็วของแรงบิดของกลไกอุปกรณ์ได้หลายวิธี เช่น กระปุกเกียร์แบบกลไกพร้อมการเปลี่ยนเกียร์ คลัตช์ และอุปกรณ์อื่นๆ แต่สิ่งนี้ไม่สามารถทำได้เสมอไป ในทางปฏิบัติ มีการใช้ 7 วิธีในการแก้ไขความเร็วของไดรฟ์แบบปรับความเร็วได้ วิธีการทั้งหมดแบ่งออกเป็นสองส่วนหลัก
- การแก้ไขสนามแม่เหล็กโดยส่งผลต่อความถี่ของกระแส ลดหรือเพิ่มจำนวนขั้วคู่ การแก้ไขแรงดันไฟ ทิศทางเป็นลักษณะของมอเตอร์ที่มีโรเตอร์กรงกระรอก (KR)
- สลิปได้รับการแก้ไขโดยแรงดันไฟฟ้าโดยการเพิ่มตัวต้านทานอีกตัวหนึ่งให้กับวงจรโรเตอร์โดยการตั้งค่าการจ่ายคู่โดยใช้วาล์วเรียงซ้อน ทิศทางนี้ใช้สำหรับโรเตอร์ที่มีเฟส
- Chastotniki มาพร้อมกับการควบคุมสองประเภท: สเกลาร์, เวกเตอร์ ด้วยการควบคุมสเกลาร์ อุปกรณ์จะทำงานที่ค่าบางอย่างของความต่างศักย์และความถี่เอาต์พุต ซึ่งทำงานในเครื่องใช้ในบ้านแบบดั้งเดิม เช่น พัดลม ด้วยการควบคุมเวกเตอร์ ความแรงปัจจุบันถูกตั้งค่าค่อนข้างแม่นยำ
- เมื่อเลือกอุปกรณ์ พารามิเตอร์กำลังมีบทบาทชี้ขาด ปริมาณกำลังขยายขอบเขตการใช้งาน ทำให้การบำรุงรักษาง่ายขึ้น
- เมื่อเลือกอุปกรณ์ ระบบจะคำนึงถึงช่วงแรงดันไฟฟ้าในการทำงานของเครือข่าย ซึ่งจะช่วยลดความเสี่ยงที่จะเกิดความล้มเหลวเนื่องจากการเปลี่ยนแปลงที่อาจเกิดขึ้นอย่างกะทันหัน หากแรงดันไฟฟ้าสูงเกินไป ตัวเก็บประจุเครือข่ายอาจระเบิดได้
- ความถี่เป็นปัจจัยสำคัญ มูลค่าของมันถูกกำหนดโดยข้อกำหนดของการผลิต ค่าต่ำสุดบ่งชี้ถึงความเป็นไปได้ของการใช้ความเร็วในโหมดการทำงานที่เหมาะสมที่สุด เพื่อให้ได้ช่วงความถี่ที่ใหญ่ขึ้น จะใช้ตัวแปลงความถี่ที่มีการควบคุมเวกเตอร์ ในความเป็นจริง อินเวอร์เตอร์ที่มีช่วงความถี่ 10 ถึง 10 Hz มักถูกใช้
- ตัวแปลงความถี่ที่มีเอาต์พุตและอินพุตต่างกันจำนวนมากนั้นสะดวกต่อการใช้งาน แต่มีราคาสูงกว่า และการตั้งค่าทำได้ยากกว่า ตัวเชื่อมต่อ chastotnik มีสามประเภท: แอนะล็อก ไม่ต่อเนื่อง ดิจิตอล การสื่อสารของคำสั่งอินพุตแบบย้อนกลับทำผ่านขั้วต่อแอนะล็อก สัญญาณเข้าขั้วดิจิตอลจากเซ็นเซอร์ชนิดดิจิตอล
- เมื่อเลือกรุ่นของตัวแปลงความถี่ จำเป็นต้องประเมินบัสควบคุม ลักษณะของมันถูกเลือกสำหรับวงจรอินเวอร์เตอร์ซึ่งกำหนดจำนวนแผ่นอิเล็กโทรด ทางเลือกที่ดีที่สุดคือเครื่องแปลงความถี่ที่มีจำนวนขั้วต่อสำรองสำหรับการปรับปรุงอุปกรณ์ให้ทันสมัยยิ่งขึ้น
- ตัวแปลงความถี่ที่สามารถทนต่อการโอเวอร์โหลดขนาดใหญ่ (สูงกว่ากำลังมอเตอร์ 15%) มีความชื่นชอบในการเลือก เพื่อไม่ให้เกิดข้อผิดพลาดในการซื้อเครื่องแปลงความถี่ โปรดอ่านคำแนะนำ ประกอบด้วยพารามิเตอร์การทำงานหลักของอุปกรณ์ หากคุณต้องการอุปกรณ์สำหรับการโหลดสูงสุด คุณต้องเลือกตัวแปลงความถี่ที่รักษากระแสที่จุดสูงสุดของการทำงานให้สูงกว่า 10% ของค่าเล็กน้อย
วิธีเชื่อมต่อเครื่องแปลงความถี่
หากสายเคเบิลสำหรับเชื่อมต่อกับ 220 V อยู่ในเฟสที่ 1 จะใช้รูปแบบ "สามเหลี่ยม" อย่าเชื่อมต่อเครื่องแปลงความถี่หากกระแสไฟขาออกสูงกว่า 50% ของค่าที่ระบุ
หากสายไฟเป็นสามเฟส 380 V แสดงว่ามีการสร้างวงจร "ดาว" เพื่อให้ง่ายต่อการเชื่อมต่อสายไฟ หน้าสัมผัสและขั้วต่อมีการกำหนดตัวอักษรไว้
- หน้าสัมผัส R, S, T ได้รับการออกแบบมาเพื่อเชื่อมต่อแหล่งจ่ายไฟเป็นเฟส
- ขั้ว U , V , W ทำหน้าที่เป็นจุดต่อมอเตอร์ ในการย้อนกลับก็เพียงพอที่จะเปลี่ยนการเชื่อมต่อของสายไฟสองเส้นเข้าด้วยกัน
อุปกรณ์จะต้องมีบล็อกที่มีขั้วสำหรับเชื่อมต่อกับกราวด์ รายละเอียดเพิ่มเติมเกี่ยวกับวิธีการเชื่อมต่อ
วิธีการรักษาตัวแปลงความถี่?
สำหรับการทำงานระยะยาวของอินเวอร์เตอร์ จำเป็นต้องตรวจสอบสภาพและปฏิบัติตามข้อกำหนด:
- ทำความสะอาดฝุ่นจากชิ้นส่วนภายใน คุณสามารถใช้คอมเพรสเซอร์เพื่อขจัดฝุ่นด้วยอากาศอัด เครื่องดูดฝุ่นไม่เหมาะสำหรับวัตถุประสงค์เหล่านี้
- ตรวจสอบสภาพของโหนดเป็นระยะ ๆ แทนที่ อายุการใช้งานของตัวเก็บประจุด้วยไฟฟ้าคือห้าปีฟิวส์เชื่อมโยงสิบปี พัดลมระบายความร้อนทำงานเป็นเวลา 3 ปีก่อนที่จะเปลี่ยน ห่วงลวดใช้เป็นเวลาหกปี
- การควบคุมแรงดันไฟ DC บัสและอุณหภูมิของเครื่องเป็นสิ่งสำคัญ ที่อุณหภูมิสูงขึ้น แป้งที่นำความร้อนจะแห้งและทำลายตัวเก็บประจุ ทุกๆ 3 ปี ชั้นของสารสื่อกระแสไฟฟ้าจะถูกนำไปใช้กับขั้วไฟฟ้า
- ต้องปฏิบัติตามเงื่อนไขและโหมดการทำงานอย่างเคร่งครัด อุณหภูมิแวดล้อมไม่ควรเกิน 40 องศา ฝุ่นและความชื้นส่งผลเสียต่อสภาพขององค์ประกอบการทำงานของอุปกรณ์
คืนทุนของตัวแปลงความถี่
ไฟฟ้ามีราคาแพงขึ้นเรื่อย ๆ หัวหน้าองค์กรถูกบังคับให้ประหยัดในรูปแบบต่างๆ ในการผลิตภาคอุตสาหกรรม พลังงานส่วนใหญ่ถูกใช้โดยกลไกที่มีมอเตอร์ไฟฟ้า
ผู้ผลิตอุปกรณ์สำหรับเครื่องจักรและหน่วยไฟฟ้าเสนออุปกรณ์และอุปกรณ์พิเศษสำหรับควบคุมมอเตอร์ไฟฟ้า อุปกรณ์ดังกล่าวช่วยประหยัดพลังงานไฟฟ้า พวกเขาเรียกว่าอินเวอร์เตอร์หรือตัวแปลงความถี่
ต้นทุนทางการเงินของการซื้อ chastotnik ไม่ได้แสดงให้เห็นถึงการประหยัดเสมอไป เนื่องจากต้นทุนของพวกเขาเทียบได้กับต้นทุน ไม่เสมอไปที่กลไกขับเคลื่อนสามารถติดตั้งอินเวอร์เตอร์ได้อย่างรวดเร็ว ปัญหาที่เกิดขึ้นในกรณีนี้คืออะไร? มาวิเคราะห์วิธีการสตาร์ทมอเตอร์แบบอะซิงโครนัสเพื่อทำความเข้าใจข้อดีของอินเวอร์เตอร์กัน
วิธีการสตาร์ทเครื่องยนต์
สามารถกำหนดได้ 4 วิธีในการสตาร์ทมอเตอร์
- สวิตชิ่งโดยตรงสำหรับมอเตอร์ที่มีขนาดไม่เกิน 10 กิโลวัตต์ วิธีการนี้ไม่ได้ผลสำหรับการเร่งความเร็ว, การเพิ่มแรงบิด, การโอเวอร์โหลด กระแสสูงกว่าค่าเล็กน้อยถึง 7 เท่า
- เปิดใช้งานโดยเลือกรูปแบบ "สามเหลี่ยม" และ "ดาว"
- การผสมผสานของซอฟต์สตาร์ทเตอร์
- แอปพลิเคชั่นอินเวอร์เตอร์ วิธีนี้มีประสิทธิภาพโดยเฉพาะอย่างยิ่งสำหรับการปกป้องมอเตอร์ การเร่งความเร็ว แรงบิด การประหยัดพลังงาน
เหตุผลทางเศรษฐกิจสำหรับผลกระทบของอินเวอร์เตอร์
เวลาคืนทุนของอินเวอร์เตอร์คำนวณโดยอัตราส่วนของค่าใช้จ่ายในการซื้อต่อการประหยัดพลังงาน โดยทั่วไปการประหยัดจะอยู่ระหว่าง 20% ถึง 40% ของกำลังมอเตอร์ที่กำหนด
ต้นทุนลดปัจจัยที่เพิ่มประสิทธิภาพของตัวแปลงความถี่:
- ลดต้นทุนการบำรุงรักษา
- เพิ่มอายุการใช้งานของเครื่องยนต์
เงินออมที่คำนวณได้:
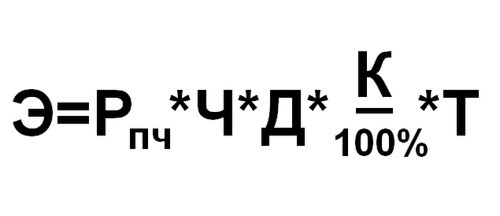
ที่ไหน E - ประหยัดเงินในรูเบิล;
Ppch - กำลังอินเวอร์เตอร์
H - ชั่วโมงการทำงานต่อวัน
D คือจำนวนวัน
K คือสัมประสิทธิ์ของเปอร์เซ็นต์การออมที่คาดหวัง
T คืออัตราค่าพลังงานในรูเบิล
ระยะเวลาคืนทุนเท่ากับอัตราส่วนของค่าใช้จ่ายในการซื้ออินเวอร์เตอร์ต่อการประหยัดเงิน การคำนวณแสดงให้เห็นว่าระยะเวลาคืนทุนอยู่ระหว่าง 3 เดือนถึง 3 ปี ขึ้นอยู่กับกำลังของมอเตอร์