ช่วงเวลาที่พัฒนาโดยมอเตอร์มีค่าเท่ากับกำลังแม่เหล็กไฟฟ้าหารด้วยความเร็วซิงโครนัสของการหมุนของไดรฟ์ไฟฟ้า
M \u003d P em / ω 0
พลังงานแม่เหล็กไฟฟ้าคือพลังงานที่ส่งผ่านช่องว่างอากาศจากสเตเตอร์ไปยังโรเตอร์ และเท่ากับการสูญเสียในโรเตอร์ซึ่งกำหนดโดยสูตร:
P em \u003d m ฉัน 2 2 (r 2 '/s)
m คือจำนวนเฟส
M \u003d M em \u003d (Pm / ω 0) (I 2 ') 2 (r 2 '/s)
ลักษณะทางไฟฟ้าเครื่องกล มอเตอร์เหนี่ยวนำคือการพึ่งพา I2' บนสลิป แต่เนื่องจากเครื่องเหนี่ยวนำทำงานเป็นมอเตอร์ไฟฟ้าเท่านั้น ลักษณะสำคัญคือลักษณะทางกล
M \u003d ฉัน m \u003d (Pm / ω 0) (I 2 ') 2 (r 2 '/s) - การแสดงออกอย่างง่ายของลักษณะทางกล
แทนค่าปัจจุบันในนิพจน์นี้ เราได้รับ: M \u003d / [ω 0 [(r 1 + r 2 '/s) 2 + (x 1 + x 2 ') 2 ]]
แทนที่จะเป็น ω 0 คุณต้องเปลี่ยนความเร็วทางกลซึ่งส่งผลให้จำนวนคู่ขั้วลดลง
M = / [ω 0 [(r 1 + r 2 '/s) 2 + (x 1 + x 2 ') 2 ]] คือสมการ ลักษณะทางกลมอเตอร์แบบอะซิงโครนัส
เมื่อมอเตอร์เหนี่ยวนำเข้าสู่โหมดเครื่องกำเนิดไฟฟ้า ความเร็วในการหมุน ω > ω 0 และสลิปจะกลายเป็นลบ (s เมื่อสลิปเปลี่ยนจาก 0 เป็น +∞ โหมดนี้จะเรียกว่า "โหมดเบรกแม่เหล็กไฟฟ้า"
ให้ค่าสลิปจาก o ถึง +∞ เราได้รับคุณสมบัติ:
ลักษณะทางกลที่สมบูรณ์ของมอเตอร์แบบอะซิงโครนัส
ดังที่เห็นได้จากลักษณะทางกล มันมีสองส่วนสุดขั้ว: อันหนึ่งอยู่ในส่วนของการเปลี่ยนแปลงการลื่นในพื้นที่จาก 0 ถึง +∞ อีกส่วนหนึ่งในส่วนจาก 0 ถึง -∞ dM/ds=0
M max = / ] + หมายถึงโหมดมอเตอร์ - หมายถึงโหมดเครื่องกำเนิดไฟฟ้า
M max \u003d M cr M cr - ช่วงเวลาวิกฤติ
สลิปที่โมเมนต์ถึงค่าสูงสุดเรียกว่าสลิปวิกฤต และถูกกำหนดโดยสูตร: s cr = ±
Critical slip มีค่าเท่ากันทั้งในโหมดมอเตอร์และเครื่องกำเนิดไฟฟ้า
ค่าของ M cr สามารถรับได้โดยการแทนที่ค่าของสลิปวิกฤตลงในสูตรโมเมนต์
ช่วงเวลาที่สลิปเท่ากับ 1 เรียกว่าแรงบิดเริ่มต้น นิพจน์สำหรับแรงบิดเริ่มต้นสามารถหาได้โดยการแทนที่ 1 ลงในสูตร:
M p \u003d / [ω 0 [(r 1 + r 2 ’) 2 + (x 1 + x 2 ’) 2 ]]
เนื่องจากตัวส่วนในสูตรสำหรับโมเมนต์สูงสุดมีลำดับความสำคัญมากกว่า U หลายขนาด จึงเป็นเรื่องปกติที่จะต้องพิจารณา M kr ≡U f 2 .
การลื่นไถลที่สำคัญขึ้นอยู่กับค่าความต้านทานที่ใช้งานของโรเตอร์โรเตอร์ R 2 ' แรงบิดเริ่มต้น ดังจะเห็นได้จากสูตร ขึ้นอยู่กับ ความต้านทานที่ใช้งานโรเตอร์ r 2 ' คุณสมบัติของแรงบิดเริ่มต้นนี้ใช้ในมอเตอร์แบบอะซิงโครนัสที่มีเฟสโรเตอร์ ซึ่งแรงบิดเริ่มต้นจะเพิ่มขึ้นโดยการแนะนำความต้านทานเชิงรุกเข้าไปในวงจรโรเตอร์
7. หม้อแปลงเดินเบา
โหมด ไม่ได้ใช้งานหม้อแปลงไฟฟ้าเรียกว่าโหมดการทำงานเมื่อหนึ่งในขดลวดของหม้อแปลงไฟฟ้าได้รับพลังงานจากแหล่งที่มีแรงดันไฟฟ้าสลับและมีวงจรเปิดของขดลวดอื่น โหมดการทำงานนี้สามารถอยู่ในหม้อแปลงจริงเมื่อเชื่อมต่อกับเครือข่าย และยังไม่ได้เปิดโหลดที่ป้อนจากขดลวดทุติยภูมิ กระแส I 0 ไหลผ่านขดลวดปฐมภูมิของหม้อแปลงในเวลาเดียวกันในระหว่าง ขดลวดทุติยภูมิไม่มีกระแสเพราะวงจรเปิดอยู่ ปัจจุบัน ผม 0 ผ่านขดลวดปฐมภูมิสร้างถาดเปลี่ยนไซน์ Ф 0 ในวงจรแม่เหล็กซึ่งเนื่องจากการสูญเสียแม่เหล็กจะล่าช้าหลังกระแสในเฟสโดยมุมการสูญเสียδ 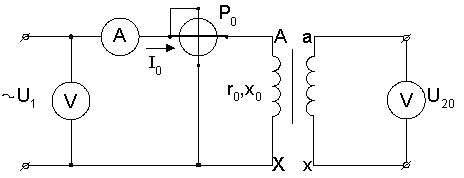
![]()
กราฟแสดงการพึ่งพาโมเมนต์แม่เหล็กไฟฟ้าบนสลิปเรียกว่า ลักษณะทางกลมอเตอร์เหนี่ยวนำ (รูปที่ 3.3)
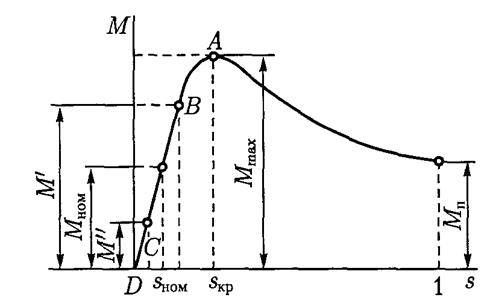
ข้าว. 3.3. ลักษณะทางกลของมอเตอร์แบบอะซิงโครนัส
สามารถใช้สูตรคำนวณแรงบิดแม่เหล็กไฟฟ้าของมอเตอร์เหนี่ยวนำอย่างง่าย (สูตร Kloss) เพื่อสร้างลักษณะทางกลได้

ในกรณีนี้ สลิปวิกฤตถูกกำหนดโดยสูตร
![]()
โดยที่ λ m \u003d M max / M nom - ความจุเกินของเครื่องยนต์
เมื่อคำนวณลักษณะทางกล ควรระลึกไว้เสมอว่าด้วยค่าสลิปที่เกินค่าวิกฤต ความแม่นยำของการคำนวณจะลดลงอย่างรวดเร็ว นี่เป็นเพราะการเปลี่ยนแปลงในพารามิเตอร์ของวงจรสมมูลของมอเตอร์แบบอะซิงโครนัส ซึ่งเกิดจากการอิ่มตัวของแม่เหล็กของสเตเตอร์และฟันของโรเตอร์ และการเพิ่มขึ้นของความถี่ของกระแสในขดลวดของโรเตอร์
รูปร่างของลักษณะทางกลของมอเตอร์เหนี่ยวนำส่วนใหญ่ขึ้นอยู่กับขนาดของแรงดันไฟฟ้าที่ใช้กับขดลวดสเตเตอร์ ยู 1 (รูปที่ 3.4) และความต้านทานเชิงรุกของขดลวดโรเตอร์ r"2 (รูปที่ 3.5)

ข้าว. 3.4. อิทธิพลของแรงดันไฟฟ้า ยู 1 เกี่ยวกับลักษณะทางกลของมอเตอร์เหนี่ยวนำ
ข้อมูลที่ระบุในแคตตาล็อกสำหรับมอเตอร์แบบอะซิงโครนัสมักจะไม่มีข้อมูลเกี่ยวกับพารามิเตอร์ของวงจรสมมูล ซึ่งทำให้ยากต่อการใช้สูตรในการคำนวณแรงบิดแม่เหล็กไฟฟ้า ดังนั้นในการคำนวณโมเมนต์แม่เหล็กไฟฟ้าจึงมักใช้สูตรนี้

ข้าว. 3.5. อิทธิพลของการต่อต้าน ร" 2 เกี่ยวกับลักษณะทางกลของมอเตอร์เหนี่ยวนำ
คุณสมบัติการทำงานของมอเตอร์แบบอะซิงโครนัสถูกกำหนดโดยลักษณะการทำงาน: การพึ่งพาความเร็วในการหมุน น 2 ,แรงบิดของเพลา เอ็ม 2 ประสิทธิภาพและตัวประกอบกำลัง cosφ 1 จากน้ำหนักบรรทุกของเครื่องยนต์ R 2 .
เมื่อคำนวณพารามิเตอร์เพื่อกำหนดประสิทธิภาพของมอเตอร์เหนี่ยวนำ จะใช้วิธีกราฟิกตามการสร้างแผนภูมิวงกลมหรือวิธีการวิเคราะห์
พื้นฐานสำหรับการดำเนินการตามวิธีการคำนวณประสิทธิภาพใดๆ คือผลลัพธ์ของการทดสอบวงจรเปิดและไฟฟ้าลัดวงจร หากเครื่องยนต์ได้รับการออกแบบ ข้อมูลเหล่านี้จะได้รับในกระบวนการคำนวณ
เมื่อคำนวณความต้านทานของตัวต้านทาน r dob ใช้ในวงจรสเตเตอร์หรือเฟสโรเตอร์เพื่อ จำกัด เริ่มต้นปัจจุบันหรือการควบคุมความเร็ว ใช้หลักการ: สำหรับมอเตอร์แบบอะซิงโครนัสโดยเฉพาะนี้ สลิป สสัดส่วนกับความต้านทานเชิงแอคทีฟของวงจรโรเตอร์ของเครื่องยนต์นี้ ตามนี้ ความเสมอภาค
(r 2 + rต่อ) /s= r2/sชื่อ
ที่ไหน r2- ความต้านทานเชิงรุกของโรเตอร์ที่คดเคี้ยวที่อุณหภูมิการทำงาน ส-ลื่นเมื่อใส่ตัวต้านทานเข้าไปในวงจรโรเตอร์ที่มีความต้านทาน rต่อ
จากนิพจน์นี้ เราได้รับสูตรสำหรับคำนวณความต้านทานเชิงแอ็คทีฟของตัวต้านทานเพิ่มเติม g ถึง 6 ซึ่งจำเป็นเพื่อให้ได้สลิปที่เพิ่มขึ้นที่กำหนด สที่โหลดที่กำหนด (จัดอันดับ):
rต่อ = r 2 (s/s นาม - 1).
มีสองวิธีในการคำนวณรีโอสแตตเริ่มต้น: แบบกราฟิกและเชิงวิเคราะห์
วิธีกราฟิกแม่นยำยิ่งขึ้น แต่ต้องมีการสร้างลักษณะทางกลตามธรรมชาติและไดอะแกรมเริ่มต้นของเครื่องยนต์ ซึ่งเกี่ยวข้องกับงานกราฟิกจำนวนมาก
วิธีวิเคราะห์การคำนวณรีโอสแตตเริ่มต้นนั้นง่ายกว่า แต่แม่นยำน้อยกว่า นี่เป็นเพราะวิธีการนี้ขึ้นอยู่กับสมมติฐานของความตรงของส่วนการทำงานของลักษณะทางกลตามธรรมชาติของมอเตอร์เหนี่ยวนำ แต่เมื่อการเลื่อนใกล้ถึงวิกฤต สมมติฐานนี้ทำให้เกิดข้อผิดพลาดที่เห็นได้ชัดเจน ซึ่งยิ่งมีนัยสำคัญ ยิ่งแรงบิดเริ่มต้นยิ่งใกล้ เอ็ม 1 ถึงแรงบิดสูงสุด เอ็ม ม. ดังนั้นวิธีคำนวณเชิงวิเคราะห์จึงใช้ได้กับค่าของแรงบิดเริ่มต้นเริ่มต้นเท่านั้น เอ็ม 1 < 0.7 เอ็ม อ่าาา .
ความต้านทานของตัวต้านทานในขั้นตอนของลิโน่สตาร์ท:
ที่สาม rต่อ 3 = r 2 (λ ม. - 1);
ที่สอง rต่อ2 = rเพิ่ม3 λ ม.;
แรก rต่อ 1 = rเพิ่ม2 λ ม.
ที่ไหน r 2 - ความต้านทานเชิงแอคทีฟของเฟสที่คดเคี้ยวของโรเตอร์ของมอเตอร์เหนี่ยวนำ
ที่ไหน อี 2 และ ฉัน 2nom - ข้อมูลแคตตาล็อกสำหรับขนาดมอเตอร์ที่เลือก
ความต้านทานของลิโน่สตาร์ทตามขั้นตอน:
แรก R PR1 = rต่อ 1 + rต่อ 2 + rต่อ 3 ;
วินาที R PR2 = rต่อ 2 + rต่อ3
ที่สาม R PR2 = rต่อ 3
เพื่อจำกัดกระแสเริ่มต้นของมอเตอร์แบบอะซิงโครนัสด้วย โรเตอร์กรงกระรอกใช้วงจรพิเศษเพื่อรวมองค์ประกอบที่จำกัดกระแสเริ่มต้น วิธีการทั้งหมดนี้มีพื้นฐานมาจากการลดแรงดันไฟฟ้าที่ใช้กับขดลวดสเตเตอร์ วงจรที่ใช้กันอย่างแพร่หลายมากที่สุดโดยมีตัวต้านทานหรือโช้กอยู่ในสายไฟเชิงเส้นของสเตเตอร์ (ดูรูปที่ 3.14 ข) การคำนวณความต้านทานที่ต้องการขององค์ประกอบเหล่านี้สำหรับการลดลงของกระแสเริ่มต้น a เมื่อเทียบกับค่าธรรมชาติจะดำเนินการตามสูตร:
สำหรับตัวต้านทานที่มีความต้านทานแบบแอคทีฟ
Rน = 
สำหรับสำลัก
Xล= 
อิมพีแดนซ์ของมอเตอร์ในโหมดลัดวงจร Z k โอห์ม
Z k = คุณ 1 /ฉัน พี
ที่นี่ Xถึงและ r k - ส่วนประกอบอุปนัยและแอคทีฟของความต้านทานนี้
R k = Z k cosφ k ; x k =
ลดแรงบิดเริ่มต้นเทียมเมื่อเปิดเครื่อง R หรือ หลี่ จะ
α m = α 2 ผม
ตารางที่3.1
ดังนั้นหากตั้งค่า α m ซึ่งกำหนดค่าของแรงบิดเริ่มต้นเทียม M "n ให้คำนวณค่าที่สอดคล้องกัน R ก็ไม่เช่นกัน x หลี่คุณสามารถใช้สูตรข้างต้นแทนค่า α 2 . ได้ ผม, ค่าของ α m.
ความต้านทานไฟฟ้าขดลวดมอเตอร์ที่ระบุในแคตตาล็อกมักจะสัมพันธ์กับอุณหภูมิ +20 °C แต่เมื่อคำนวณคุณสมบัติและพารามิเตอร์ของมอเตอร์ ความต้านทานของขดลวดจะต้องถูกนำไปที่อุณหภูมิการทำงาน ตามมาตรฐานปัจจุบัน อุณหภูมิในการทำงานจะขึ้นอยู่กับระดับความต้านทานความร้อน ฉนวนไฟฟ้าใช้ในเครื่องยนต์: ด้วยความต้านทานความร้อนระดับ B อุณหภูมิในการทำงานคือ 75 ° C และด้วยระดับความต้านทานความร้อน F และ H - 115 ° C การคำนวณความต้านทานของขดลวดต่ออุณหภูมิการทำงานใหม่ทำได้โดยการคูณความต้านทานของขดลวดที่อุณหภูมิ 20 ° C โดยค่าสัมประสิทธิ์ความร้อน k t:
r= r 20k ที
ค่าสัมประสิทธิ์นี้ขึ้นอยู่กับวัตถุประสงค์ของเครื่องยนต์และขนาด (ความสูงของแกนหมุน) (ตารางที่ 3.1)
เครื่องซิงโครนัส
แนวคิดพื้นฐาน
ลักษณะเฉพาะ เครื่องซิงโครนัสเป็นความสัมพันธ์ที่เข้มงวดระหว่างความเร็วของโรเตอร์ น 1 และความถี่ กระแสสลับในขดลวดสเตเตอร์ ฉ 1:
น 1 = ฉ 1 60/ R.
กล่าวอีกนัยหนึ่งสนามแม่เหล็กหมุนของสเตเตอร์และโรเตอร์ของเครื่องซิงโครนัสหมุน พร้อมกันคือมีความถี่เท่ากัน
ตามการออกแบบ เครื่องซิงโครนัสจะแบ่งออกเป็นเสาเด่นและเสาไม่เด่น ในเครื่องซิงโครนัสแบบซิงโครนัสแบบขั้วเด่น โรเตอร์มีขั้วที่เด่นชัดซึ่งเป็นที่ตั้งของขดลวดสนาม กระแสตรง. ลักษณะเฉพาะของเครื่องจักรดังกล่าวคือความแตกต่างของความต้านทานแม่เหล็กตามแกนตามยาว (ตามแกนของเสา) และตามแนวแกนตามขวาง (ตามแกนที่ผ่านในช่องว่างระหว่างขั้ว) ความต้านทานแม่เหล็กต่อการไหลของสเตเตอร์ตามแกนตามยาว ddความต้านทานแม่เหล็กน้อยกว่ามากต่อการไหลของสเตเตอร์ตามแกนตามขวาง คิวคิวในเครื่องซิงโครนัสแบบไม่มีขั้ว ความต้านทานแม่เหล็กตามแกนตามยาวและตามขวางจะเท่ากัน เนื่องจากช่องว่างอากาศสำหรับเครื่องเหล่านี้ตามแนวเส้นรอบวงของสเตเตอร์จะเท่ากัน
โดยหลักการแล้วการออกแบบสเตเตอร์ของเครื่องซิงโครนัสไม่แตกต่างจากสเตเตอร์ของเครื่องอะซิงโครนัส ในขดลวดสเตเตอร์ ระหว่างการทำงานของเครื่องจักร EMF จะถูกเหนี่ยวนำและกระแสไหลที่สร้างแรงแม่เหล็ก (MFF) ซึ่งค่าสูงสุดคือ
F 1 =0,45ม 1 ฉัน 1 w 1 k รอบ 1 / R
MDS นี้สร้างสนามแม่เหล็กหมุนและในช่องว่างอากาศ δ เครื่องสร้างการเหนี่ยวนำแม่เหล็ก ซึ่งกำหนดการกระจายภายในแต่ละขั้ว t ขึ้นอยู่กับการออกแบบของโรเตอร์ (รูปที่ 4.1)
สำหรับเครื่องซิงโครนัสขั้วเด่น สมการความเค้นนั้นใช้ได้:
Ú 1 =Ė 0 + Ė 1d+ Ė 1q+ Ė σ1 – İ 1 r 1
ที่ไหน Ė 0 - EMF หลักของเครื่องซิงโครนัส สัดส่วนกับฟลักซ์แม่เหล็กหลักของเครื่องซิงโครนัส F 0 ; Ė 1 d - EMF ของปฏิกิริยากระดองของเครื่องซิงโครนัสตามแกนตามยาว สัดส่วนกับ MMF ของปฏิกิริยากระดองตามแกนตามยาว F 1 วัน; Ė σ1 - ปฏิกิริยากระดอง EMF ตามแกนตามขวาง, สัดส่วนกับปฏิกิริยากระดอง MMF ตามแกนขวาง F 1q; Ė σ1 - EMF ของการรั่วไหลเนื่องจากมีการรั่วไหลของสนามแม่เหล็ก F 0 ค่าของ EMF นี้เป็นสัดส่วนกับความต้านทานการรั่วของขดลวดสเตเตอร์ X 1
Ė σ1 = เจİ 1r
İ 1 r 1 - แรงดันตกคร่อมในขดลวดเฟสสเตเตอร์ โดยปกติค่านี้จะถูกละเลยเมื่อแก้ปัญหาเนื่องจากมีค่าน้อย
ข้าว. 4.1. กราฟการกระจายตัวเหนี่ยวนำแม่เหล็กตามแกนตามขวาง
ขั้วโดยปริยาย ( เอ) และขั้วที่ชัดเจน ( ข)เครื่องซิงโครนัส:
1 - กำหนดการ MDS; 2 - กราฟการเหนี่ยวนำแม่เหล็ก
สำหรับเครื่องซิงโครนัสแบบไม่มีขั้ว สมการความเค้นมีรูปแบบ
Ú 1 =Ė 0 + Ė ค- İ 1 r 1
ที่นี่
Ė ค= Ė 1 + Ė σ1
ที่ไหน Ė 1 - แรงเคลื่อนไฟฟ้าของอาร์เมเจอร์ของเครื่องซิงโครนัสขั้วโดยนัย สมการความเค้นที่พิจารณาแล้วสอดคล้องกับไดอะแกรมความเค้นเวกเตอร์ ต้องสร้างไดอะแกรมเหล่านี้เพื่อกำหนดแรงเคลื่อนไฟฟ้าหลักของเครื่อง อี 0 หรือแรงดันขดลวดสเตเตอร์ ยู 1. ควรระลึกไว้เสมอว่าสมการความเค้นและความสอดคล้องกัน ไดอะแกรมเวกเตอร์อย่าคำนึงถึงความอิ่มตัวของสนามแม่เหล็กของวงจรแม่เหล็กของเครื่องซิงโครนัสซึ่งดังที่ทราบกันดีว่าส่งผลต่อค่าความต้านทานอุปนัยทำให้ลดลง การบัญชีสำหรับความอิ่มตัวนี้เป็นงานที่ยาก ดังนั้นในการคำนวณ EMF และแรงดันไฟฟ้าของเครื่องซิงโครนัสมักจะใช้ แผนภาพการปฏิบัติ EMF ซึ่งคำนึงถึงสถานะของความอิ่มตัวของระบบแม่เหล็ก ซึ่งเกิดจากการกระทำของปฏิกิริยากระดองเมื่อโหลดเครื่องซิงโครนัส เมื่อสร้างไดอะแกรม EMF ที่ใช้งานได้จริง แรงแม่เหล็กของปฏิกิริยาอาร์เมเจอร์จะไม่ถูกสลายไปเป็นส่วนประกอบตามยาวและตามขวาง ดังนั้น แผนภาพนี้จึงสามารถใช้ได้ทั้งในการคำนวณของขั้วเด่นและขั้วนัย
เมื่อแก้ปัญหาที่เกี่ยวข้องกับเครื่องกำเนิดไฟฟ้าแบบซิงโครนัสที่เชื่อมต่อแบบขนานกับเครือข่ายหรือกับมอเตอร์ซิงโครนัสจะใช้ ลักษณะเชิงมุมเครื่องซิงโครนัสแทนการพึ่งพาโมเมนต์แม่เหล็กไฟฟ้า เอ็ม จากมุมโหลด θ ในกรณีนี้ ควรจำไว้ว่าในเครื่องซิงโครนัสเสาเด่นมีสองจุด: หลัก เอ็ม หลักและปฏิกิริยา เอ็ม p และในเครื่องที่ไม่สำคัญ - เฉพาะประเด็นหลัก:
![]()
มุมโหลด θ นามสอดคล้องกับ พิกัดแรงบิด เอ็ม น. แรงบิดสูงสุดของเครื่องซิงโครนัสกำหนดความจุเกินของเครื่องซิงโครนัสซึ่งเป็นสิ่งสำคัญสำหรับทั้งสอง เครื่องกำเนิดไฟฟ้าแบบซิงโครนัสทำงานควบคู่ไปกับเครือข่ายและสำหรับมอเตอร์ซิงโครนัส ในเครื่องซิงโครนัสแบบไม่มีขั้วพิเศษ แรงบิดสูงสุดสอดคล้องกับมุมโหลด θ = 90° ในเครื่องที่มีขั้วเด่น θ kr< 90° и обычно составляет 60 - 80° в зависимости от соотношения основного и реактивного электромагнитных моментов этой машины.
ในการคำนวณมุมโหลดวิกฤต ซึ่งกำหนดความจุโอเวอร์โหลดของเครื่องซิงโครนัสแบบขั้วเด่น คุณสามารถใช้นิพจน์ได้
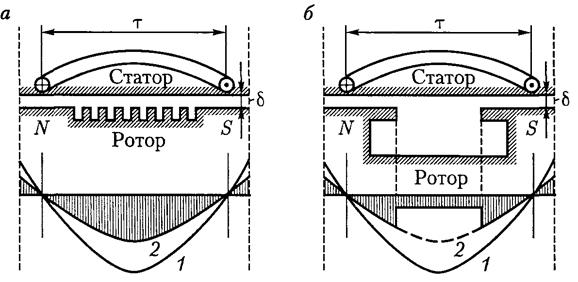
ขนาดของแรงบิดของมอเตอร์เหนี่ยวนำได้รับอิทธิพลอย่างมากจากการเปลี่ยนเฟสระหว่างกระแส I 2 และ e ดีเอส โรเตอร์ E 2S
พิจารณากรณีที่ความเหนี่ยวนำของขดลวดของโรเตอร์มีขนาดเล็ก ดังนั้นจึงละเลยการเปลี่ยนเฟสได้ (รูปที่ 223, a)
สนามแม่เหล็กที่หมุนของสเตเตอร์จะถูกแทนที่ด้วยสนามของขั้ว N และ S ซึ่งหมุนตามเข็มนาฬิกา การใช้กฎ มือขวากำหนดทิศทาง e. ดีเอส และกระแสในโรเตอร์ที่คดเคี้ยว กระแสของโรเตอร์ทำปฏิกิริยากับสนามแม่เหล็กหมุนสร้างแรงบิด ทิศทางของแรงที่กระทำต่อตัวนำกระแสไฟฟ้าที่กำหนดโดยกฎมือซ้าย ดังที่เห็นได้จากรูปวาด โรเตอร์ภายใต้การกระทำของแรงจะหมุนไปในทิศทางเดียวกับสนามหมุน นั่นคือตามเข็มนาฬิกา
พิจารณากรณีที่สองเมื่อความเหนี่ยวนำของขดลวดโรเตอร์มีขนาดใหญ่ ในกรณีนี้เฟสจะเลื่อนระหว่างกระแสของโรเตอร์ I 2 และ e ดีเอส โรเตอร์ E 2S ก็จะมีขนาดใหญ่เช่นกัน ในรูป 223, b, สนามแม่เหล็กของสเตเตอร์ของมอเตอร์เหนี่ยวนำยังคงแสดงอยู่ในรูปแบบของเสาหมุนตามเข็มนาฬิกา N และ S ทิศทางของ e ดีเอส ยังคงเหมือนเดิมตามในรูป 223, a แต่เนื่องจากกระแสในเฟสล่าช้า แกน สนามแม่เหล็กโรเตอร์จะไม่ตรงกับเส้นกลางของสนามสเตเตอร์อีกต่อไป แต่จะเลื่อนไปตามมุมบางมุมกับการหมุนของสนามแม่เหล็ก สิ่งนี้จะนำไปสู่ความจริงที่ว่าพร้อมกับการก่อตัวของแรงบิดในทิศทางเดียวตัวนำบางตัวจะสร้างแรงบิดที่ตรงกันข้าม
จากสิ่งนี้จะเห็นได้ว่าแรงบิดทั้งหมดของมอเตอร์ในระหว่างการเปลี่ยนเฟสระหว่างกระแสและ e ดีเอส โรเตอร์มีขนาดเล็กกว่าเคสเมื่อ I 2 และ E 2S อยู่ในเฟส สามารถพิสูจน์ได้ว่าแรงบิดของมอเตอร์เหนี่ยวนำถูกกำหนดโดยส่วนประกอบที่ทำงานอยู่ของกระแสโรเตอร์เท่านั้น นั่นคือ กระแส I 2 cos และสามารถคำนวณได้โดยสูตร:

Ф m - ฟลักซ์แม่เหล็กสเตเตอร์ (และประมาณเท่ากับฟลักซ์แม่เหล็กที่เกิดขึ้นของมอเตอร์เหนี่ยวนำ);
มุมเฟสระหว่าง e. ดีเอส และกระแสเฟสที่คดเคี้ยว
C คือสัมประสิทธิ์คงที่
หลังการทดแทน:
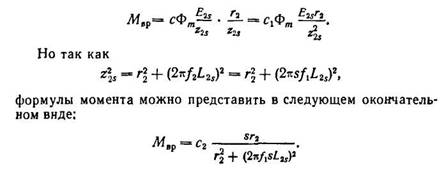
จากนิพจน์สุดท้าย จะเห็นได้ว่าแรงบิดของมอเตอร์เหนี่ยวนำขึ้นอยู่กับสลิป
ในรูป 224 แสดงเส้นโค้ง A ของแรงบิดมอเตอร์เทียบกับสลิป จะเห็นได้จากเส้นโค้งว่าในขณะที่สตาร์ท เมื่อ s=l และ n = 0 แรงบิดของมอเตอร์มีขนาดเล็ก สิ่งนี้อธิบายได้จากข้อเท็จจริงที่ว่าในขณะที่เริ่มต้น ความถี่ของกระแสในขดลวดโรเตอร์จะสูงที่สุดและความต้านทานอุปนัยของขดลวดมีขนาดใหญ่ ส่งผลให้ cos มีค่าน้อย (เพราะ
|
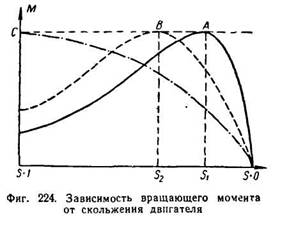
แถว 0.1-0.2) ดังนั้นแม้ว่ากระแสไฟเริ่มต้นจะมีขนาดใหญ่ แต่แรงบิดในการสตาร์ทก็จะน้อย
ด้วยสลิป S 1 แรงบิดของมอเตอร์จะมีค่าสูงสุด เมื่อการลื่นไถลลดลงอีกหรือกล่าวอีกนัยหนึ่งด้วยความเร็วรอบการหมุนของเครื่องยนต์ที่เพิ่มขึ้น แรงบิดจะลดลงอย่างรวดเร็ว
ในการเซและเมื่อเลื่อน s = 0 แรงบิดของเครื่องยนต์ก็จะเท่ากับศูนย์เช่นกัน
ควรสังเกตว่าในมอเตอร์แบบอะซิงโครนัสจะไม่มีสลิปเท่ากับศูนย์ สิ่งนี้เป็นไปได้ก็ต่อเมื่อโรเตอร์ได้รับแรงบิดจากภายนอกในทิศทางการหมุนของสนามสเตเตอร์
แรงบิดเริ่มต้นสามารถเพิ่มได้หากในขณะที่เริ่มต้นเฟสเปลี่ยนระหว่างกระแสและ e ดีเอส โรเตอร์ จากสูตร
จะเห็นได้ว่าหากมีความต้านทานอุปนัยคงที่ของขดลวดของโรเตอร์ ความต้านทานเชิงแอคทีฟจะเพิ่มขึ้น มุมเองก็จะลดลง ซึ่งจะนำไปสู่ความจริงที่ว่าแรงบิดของมอเตอร์จะเพิ่มขึ้นเช่นกัน ใช้ในทางปฏิบัติเพื่อเพิ่มแรงบิดในการสตาร์ทเครื่องยนต์ ในขณะที่สตาร์ท ความต้านทานแบบแอคทีฟ (รีโอสแตตสตาร์ท) จะถูกใส่เข้าไปในวงจรโรเตอร์ ซึ่งจะถูกลบออกทันทีที่เครื่องยนต์เพิ่มความเร็ว
การเพิ่มแรงบิดเริ่มต้นจะทำให้ได้แรงบิดสูงสุดของมอเตอร์ที่มีการลื่นมากขึ้น (จุด S 2 ของเส้นโค้ง B ในรูปที่ 224) โดยการเพิ่มความต้านทานเชิงแอ็คทีฟของวงจรโรเตอร์เมื่อสตาร์ทเครื่อง เป็นไปได้ที่จะบรรลุแรงบิดสูงสุดในขณะที่สตาร์ทเครื่อง (s = 1 โค้ง C)
แรงบิดของมอเตอร์เหนี่ยวนำเป็นสัดส่วนกับกำลังสองของแรงดันไฟ ดังนั้นแม้แรงดันไฟฟ้าที่ลดลงเล็กน้อยก็มาพร้อมกับแรงบิดที่ลดลงอย่างรวดเร็ว
กำลัง P 1 ที่จ่ายให้กับขดลวดสเตเตอร์ของมอเตอร์เหนี่ยวนำเท่ากับ:
![]()
โดยที่ m 1 คือจำนวนเฟส
สเตเตอร์ของมอเตอร์มีการสูญเสียพลังงานดังต่อไปนี้:
1) ในขดลวดสเตเตอร์ R es =m 1 I 1 2 r 1 ;
2) ในเหล็กสเตเตอร์และฮิสเทรีซิสและกระแสน้ำวน พี ซี .
พลังงานที่จ่ายให้กับโรเตอร์คือพลังของสนามแม่เหล็กหมุนหรือที่เรียกว่าพลังงานแม่เหล็กไฟฟ้า P eM
กำลังไฟฟ้าแม่เหล็กไฟฟ้าเท่ากับความแตกต่างระหว่างกำลังที่จ่ายให้กับมอเตอร์กับการสูญเสียในสเตเตอร์ของมอเตอร์ กล่าวคือ
|

ความแตกต่างระหว่าง Р eM และแสดงถึงการสูญเสียทางไฟฟ้าในขดลวดของโรเตอร์ Р eP หากเราละเลยการสูญเสียในเหล็กโรเตอร์เนื่องจากไม่มีนัยสำคัญ (ความถี่ remagnetization ของโรเตอร์มักจะมีขนาดเล็กมาก):

ดังนั้นการสูญเสียในการหมุนของโรเตอร์จึงเป็นสัดส่วนกับสลิปของโรเตอร์
ถ้ามาจาก พลังงานกลพัฒนาโดยโรเตอร์ ลบการสูญเสียทางกล R mx เนื่องจากแรงเสียดทานในตลับลูกปืนของโรเตอร์ แรงเสียดทานในอากาศ ฯลฯ รวมถึงการสูญเสียเพิ่มเติม R D ที่เกิดขึ้นภายใต้ภาระและเนื่องจากสนามเร่ร่อนของโรเตอร์ และการสูญเสียที่เกิดจาก: การเต้นของสนามแม่เหล็ก ในฟันสเตเตอร์และโรเตอร์จากนั้นจะมีกำลังที่มีประโยชน์บนเพลามอเตอร์ซึ่งเราแสดงด้วย P 2 .
ประสิทธิภาพของมอเตอร์เหนี่ยวนำสามารถกำหนดได้โดยสูตร:

จากนิพจน์สุดท้าย จะเห็นได้ว่าโมเมนต์ของการหมุนของมอเตอร์เหนี่ยวนำเป็นสัดส่วนกับผลคูณของขนาดของฟลักซ์แม่เหล็กที่หมุนอยู่ กระแสของโรเตอร์ และโคไซน์ของมุมระหว่าง e ดีเอส โรเตอร์และกระแสของมัน

จากวงจรสมมูลของมอเตอร์แบบอะซิงโครนัส จะได้ค่าของกระแสโรเตอร์ที่ลดลง ซึ่งเราให้โดยไม่มีการพิสูจน์