Elektrinių pavarų sukimosi dažnio reguliavimas yra vienas iš svarbiausių šiuolaikinės elektrotechnikos uždavinių. Sukūrus ir taikant racionalius reguliavimo metodus galima padidinti mechanizmų našumą, pagerinti gaminių kokybę, supaprastinti mechaninę pavaros dalį, sumažinti energijos sąnaudas ir kt.
Dėl judesio santūrumo variklis linkęs rezonuoti. Kuo mažesnis elementarus žingsnis, tuo mažesnė rezonansinė tendencija. Rezonansas priklauso ir nuo krūvio pobūdžio – kuo inerciškesnis ir mažiau bauginantis, tuo didesnė polinkis rezonuoti tam tikrais dažniais. Ekstremaliu rezonanso atveju variklis sugenda ir sustoja arba veikia nekontroliuojamai, netinkamai atlikdamas judesius. Toks variklio elgesys paprastai pastebimas tik judant visą žingsnį keliais dažniais, žemesniais nei 300 Hz.
Veikiant pusės greičio ir mikro rankiniu režimu, variklis visada laikosi nustatyto greičio ir padėties, padidindamas triukšmą ir vibraciją savo rezonansiniais dažniais. Kuo aukštesnė mikroskopija, tuo mažesni rezonansiniai dažniai. Kl .: reikalauja mano konkrečios programos didelis greitis suktis. Geriausia eksperimentuoti su žingsnių komandomis, pradedant nuo mažos vertės ir palaipsniui didinant dažnį iki norimos vertės. Atkreipkite dėmesį, kad laipsniškas maksimalaus dažnio didinimas turi būti simetriškas ir pereinant prie starto-stop.
Reguliuojant greitį, nereikėtų maišyti natūralaus elektros variklio greičio pokyčio pagal jo mechanines charakteristikas, kai keičiasi pavaros veleno apkrova. Reguliavimas – tai priverstinis elektrinės pavaros sukimosi greičio keitimas, priklausomai nuo pavaros mechanizmo reikalavimų.
Pirmiausia nustatykite tinkamą paleidimo-sustabdymo dažnį. Tada padidinkite iki reikiamo dažnio. Jei padėtis jau patenkinama, prieš pradėdami sustabdyti įsitikinkite, kad dažnis sklandžiai nukris. Tai yra tiesa. „Trapecijos formos“ greičio profilis. Jei rezultatas nepasiekiamas tokiu greičiu, pabandykite.
Modulis tiekiamas su aukštesne įtampa, kaip nurodyta aukščiau; Atminkite, kad po kiekvieno judesio kitam reikia papildomo laiko, kad nuramintų rotorių, tai yra milisekundės. Dėl artėjančio apsisukimo šis laikas turėtų būti ilgesnis; Išbandykite tą patį su galingesniu dviračiu. Esant didesnėms vertėms, dėl didesnės laikymo srovės variklio ir valdymo modulio šiluma bus didesnė, todėl gali prireikti papildomo priverstinio aušinimo naudojant modulio ventiliatorių ir net variklį.
Bet kuriam reguliavimo metodui būdingi šie pagrindiniai rodikliai:
reguliavimo diapazonas – maksimalaus ir mažiausio greičio santykis, kurį galima gauti pavaroje t.y. ;
reguliavimo sklandumas – stabilių greičių, gautų tam tikrame reguliavimo diapazone, skaičius;
efektyvumas - atsižvelgiant į išlaidas, susijusias su paties valdymo metodo sukūrimu, ir papildomus energijos nuostolius, atsirandančius pavaroje;
Maksimalus sukimosi greitis
Kreipkitės į pasirinkto valdymo modulio gamintoją! Pavaros veikimo metu galimo taupymo diapazonas dažnai yra susijęs su apkrovos sukimo momento charakteristikomis. Sistemose su fiksuota energetines charakteristikas energijos sąnaudos yra tiesiogiai proporcingos sukimo momento ir veleno greičio sumažėjimui, o kintamo sukimo momento taikymuose su kvadratinėmis apkrovos charakteristikomis energijos suvartojimas keičiasi trečiąja sukimosi greičio galia.
pavaros stabilumas - sukimosi greičio pokytis pasikeitus sukimo momentui ant variklio veleno. Darbo stabilumą visiškai lemia mechaninių charakteristikų standumas;
reguliavimo kryptis rodo, kad greitis keičiasi tik žemyn arba tik į viršų nuo pagrindinio pavaros greičio, arba galimas ir aukštyn, ir žemyn.
Dėl šios priežasties mašinų variklių greičio reguliavimas dažnai lemia galios naudą, kurią galima greitai pamatyti elektros sąskaitoje. Tačiau paprastas greičio pakeitimas dar negarantuoja, kad tikimasi sutaupyti. Trifazio našumo faktoriai indukciniai varikliai paprastai skiriamas tik už vardinį tašką. Jei variklis yra valdomas tiesiogiai iš tinklo su vardine apkrova, jo našumas žymiai sumažėja dėl nuolatinių mechaninių ir elektromagnetinių nuostolių.
Dirbti su dažnio keitikliai užtikrina optimalų variklio įmagnetinimą, priklausomai nuo valdymo metodo kokybės. Todėl, naudojant keitiklį, koeficientas naudingas veiksmas visos jėgainės ne tiek krenta dirbant su mažos galios varikliu. Pastebimas pagerėjimas paprastai pastebimas naudojant variklius, kurių galia viršija 11 kW.
Asinchroninio variklio rotoriaus greitis nustatomas pagal formulę:
čia f – kintamosios srovės dažnis; p – statoriaus apvijų polių porų skaičius; s - slydimas.
Iš aukščiau pateiktos formulės galime daryti išvadą, kad asinchroninio variklio greitį galima valdyti pakeitus vieną iš trijų verčių:
Dėl to sumažėja nuostoliai maitinimo kabeliuose. Praktinis pavyzdys: ketvirtį pradėjus eksploatuoti rotacines pavaras, žymiai sumažėjo paleidimų skaičius, taigi ir mechaninė sistemos apkrova. Programose, kuriose nėra greitų apkrovos pokyčių, vartotojas gali pritaikyti automatinį energijos optimizavimą. Tada keitiklis sumažina variklio įmagnetinimą iki optimalaus minimumo. Rezultatas yra papildomas energijos sutaupymas, palyginti su apyvartos sumažėjimu.
Ši funkcija gerai veikia atliekant visus lėtus reguliavimus, kurie dažniausiai naudojami siurblio ir ventiliatoriaus automatikoje. Sumažinti paleidimo ciklai Greičio valdymas gali sumažinti daugelio programų paleidimų skaičių. Bet koks nereguliuojamas elektros variklio paleidimas reikalauja papildomos energijos. Kalbant apie siurblius, energijos sąnaudos paleidimui paprastai sudaro 5-10% viso suvartojimo, tačiau yra pavyzdžių, kad paleidimui reikia iki 40% energijos.
paslysta;
Statoriaus magnetinio srauto polių porų skaičius p;
Statoriaus srovės dažniai f.
Panagrinėkime galimybę reguliuoti rotoriaus greitį keičiant slydimą. Slydimas yra daugelio variklio parametrų funkcija:
s = f(R1, X1; R2; X2; U),
kur R 1 X 1 - statoriaus grandinės aktyvioji ir indukcinė varža; R 2 , X 2 - tas pats, rotorius;
Be to, paleidimo metu sumažėja didžiausios srovės ir mechaninės smūginės apkrovos. Kiti ilgesnio tarnavimo laiko pranašumai dėl mažesnio komponentų mechaninio įtempimo. Visos šios galimybės pasiekiamos naudojant šiuolaikinių dažnio keitiklių programinės įrangos funkcijas.
Optimizavus sukimo momentą ir sukimosi greitį, energijos vartojimo efektyvumą galima padidinti daugelyje pastovaus sukimo momento programų. Programoms su pastovios charakteristikos apkrovos sukimo momentas, pavyzdžiui, šiek tiek pasikeitus apkrovai, pasikeitus sukimosi greičiui platesniame diapazone. Be kita ko, yra gamybos linijų konvejeriai, konvejeriai, elevatoriai, maišytuvai, malūnai.
U - variklio maitinimo įtampa.
Iš formulės matyti, kad norint pakeisti slydimą s, į statoriaus arba rotoriaus apvijų grandines galima įvesti papildomus rezistorius arba induktyvumus arba sumažinti variklio maitinimo įtampą.
Įtampos keitimas.
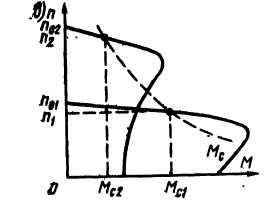
Yra žinoma, kad asinchroninio variklio didžiausias sukimo momentas yra proporcingas tinklo įtampos kvadratui, o mechaninės charakteristikos esant įvairioms įtampoms yra tokios, kaip parodyta 5.8 pav., a. Šių charakteristikų analizė kartu su kėlimo įrenginio pasipriešinimo momento Ms.g charakteristika rodo, kad greičio reguliavimas galimas labai siaurame diapazone. Esant 0,6 U n įtampai, variklis neužsives, nes Mp<Мс.г, а при снижении напряжения ниже 0,6 UB работающий двигатель остановится.
Atsižvelgiant į tiektuvo pritaikymo pavyzdį, kai ant automobilio sumontuotas variklio korpusas yra ant darbinio diržo, akivaizdu, kad kėbulo svoris visada yra vienodas, nepriklausomai nuo to, ar diržas juda greitai, ar lėtai. Taigi laikas, kurio reikia norint perkelti tą bloką, visada yra vienodas. Žinoma, trinties ir pagreičio laikai kinta priklausomai nuo eksploatavimo sąlygų, tačiau apkrovos poreikis yra pastovus. Šiai sistemai reikalinga galia yra proporcinga reikiamam sukimo momentui ir variklio sūkiams.
Jei sukimosi greitis gali būti sumažintas esant pastoviai apkrovai, energijos taupymas taip pat bus matomas iš karto. Dažnai juosta vežamų prekių kiekis nėra pastovus. Jei juostos greitis atitiks vežamos medžiagos kiekį, tai ne tik užtikrins sklandų ir nenutrūkstamą transportavimą, bet ir reikalingą energiją. Tačiau jei greičio reguliavimas neįmanomas arba nepageidautinas, daugumos dažnio keitiklių energiją galima sutaupyti. Jie reguliuoja variklio išėjimo įtampą priklausomai nuo apkrovos.
Variklį, kuris suka mechanizmą, šiek tiek geriau valdyti ventiliatoriaus pasipriešinimo momentu Ms.v - valdymo diapazonas plečiasi.
Keičiant parametrus R 1 , X 1 , X 2 .
Šių parametrų padidėjimas turi beveik tokį patį poveikį variklio mechaninėms charakteristikoms, kaip ir įtampos sumažėjimas, o padidinus varžą R 1 taip pat padidėja energijos nuostoliai statoriaus grandinėje.
Didėjant įtampai, apkrova didėja. Šio valdymo kokybę lemia keitiklio kokybė. Tačiau tokio pat energijos taupymo, kurį galite sutaupyti naudojant šią funkciją, nepakanka investicijoms į dažnio keitiklį pateisinti. Esant sumažintam sukimosi greičiui, energijos poreikis sumažėja priklausomai nuo trečiosios galios; Dažnio keitiklių naudojimas ventiliatoriams ir išcentriniams siurbliams valdyti daugeliu atvejų buvo sumažintas per mažiau nei dvejus metus.
Siurblio ir ventiliatoriaus greičio reguliavimo sistemos yra dažniausiai naudojamos kintamo sukimo momento pavaroms su kvadratinėmis charakteristikomis. Tačiau siurblių atveju svarbu atskirti plačiai naudojamus periferinius siurblius su kintamomis sukimo momento charakteristikomis nuo ekscentrinių, vakuuminių arba darbinio tūrio siurblių, kurių sukimo momento apkrova yra pastovi.
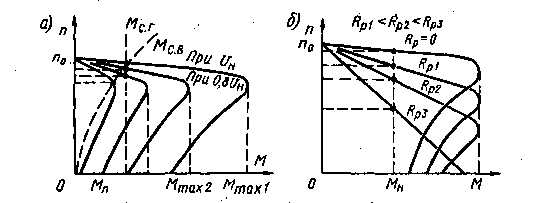
5.8 pav. Mechaninės asinchroninio variklio charakteristikos keičiant
rotoriaus grandinės įtampa ir varža
50-ųjų pabaigoje vadinamoji droselio elektrinė pavara įgijo tam tikrą pasiskirstymą, kai pasipriešinimas X 1 buvo padidintas įtraukus magnetinį stiprintuvą (sotinimo induktorių) į statoriaus grandinę. Pagrindinis tokių elektrinių pavarų trūkumas (taip pat ir pasikeitus įtampai U) yra tas, kad slydimo galia visiškai paverčiama šiluma rotoriuje, padidinant variklio perkaitimą. Droselio pavarose taip pat sumažėja galios koeficientas cosf.
Siurblių ir ventiliatorių skaičius yra didžiulis. Apytiksliai 70 % visos Europos Sąjungos pramonės reikmėms sunaudojamos energijos sudaro elektros varikliai, o siurbliai ir ventiliatoriai – apie 37 %. Paprastas, bet labai efektyvus būdas taupyti energiją kintamo greičio mašinose yra greičio reguliavimas. Esant sumažintam sukimosi greičiui, energijos poreikis sumažinamas iki trečios galios. Dėl šio didelio ekonomiškumo potencialo visos kvadratinių metrų programos idealiai tinka energijos vartojimo efektyvumo analizei.
Be siurblio ir sistemos charakteristikų, charakteristikų kreivė kartu su siurblio ir sistemos charakteristikomis taip pat rodo keletą efektyvumo kreivių; Tiek droselio, tiek greičio valdymo sistemoje veikimo taškas yra už optimalaus efektyvumo koeficiento ribų.
Iš to, kas išdėstyta pirmiau, išplaukia, kad parametrų R 1 X 1 X 2 padidėjimas arba U sumažėjimas ne tik dėl greičio kontrolės, bet ir dėl kai kurių kitų priežasčių (pavyzdžiui, tinklo parametrų įtakos). labai nepageidautina asinchroniniam varikliui.
Rotoriaus grandinės aktyviosios varžos pasikeitimas.
Vienintelis asinchroninio variklio parametras, nuo kurio nepriklauso didžiausias variklio sukimo momentas, yra varža R 2. . Vadinasi, įvedus papildomus rezistorius į rotoriaus grandinę, išsaugoma mechaninė variklio perkrova ir, kas labai svarbu, energijos nuostoliai išsiskiria daugiausia rezistorių, ty variklio išorėje.
Norint išvengti netikėtumų nustatant siurblių ir ventiliatorių greitį, vartotojas projektavimo etape turi atsiminti, kad perjungimo greitis taip pat keičia darbo tašką, taigi ir srauto mašinos naudingumo koeficientą. Srauto mašinos surinkimas ir kintamo greičio kintamo greičio pavara yra energiją taupanti sistema. Jei skirtumas tarp didžiausios galios ir vidutinės darbo apkrovos esant nepakankamam varikliui yra per didelis, kaskadinė sistema yra geras sprendimas.
Šis metodas taikomas tik varikliams su faziniu rotoriumi ir žiedais. Voverės narvelio rotoriaus varžos pakeisti beveik neįmanoma. Įvairių rotoriaus varžų mechaninės charakteristikos parodytos 5.8 pav., b.
Trumpai tariant, reguliavimo procesas yra toks: M=Ms, n=const;  -
- -
- -
- -
- -
- -
- -
- .Įrašas paaiškinamas (2-6) formulėmis.
.Įrašas paaiškinamas (2-6) formulėmis.
Taip pat pertvarkant esamą sistemą tokios investicijos po trumpo laiko sugrįžta. Kaskadinėje sistemoje greičio reguliavimo siurblys patenkina pagrindinį poreikį. Kai tik padidėja poreikis, dažnio keitiklis persijungia į kitą siurblį. Tokiu būdu siurbliai dirba optimaliai su optimaliu efektyvumu. Siurblio valdymas visada užtikrina geriausią sistemos panaudojimą energijos atžvilgiu. Ta pati konstrukcija gali būti panašiai pritaikyta ventiliatoriaus agregatui.
Priklausomai nuo gamintojo ir versijos, kaskadiniai valdikliai jau yra įmontuoti į keitiklį arba galimi kaip išoriniai moduliai. Kreivė rodo pasirinkto siurblio energijos suvartojimą esant greičio reguliavimui – esant mažesniam nei 32 Hz dažniui, papildomi siurblio nuostoliai viršija sutaupytus pinigus; Pateiktame įrenginyje optimalus energijos dažnis yra 38 Hz – jei siurblys neturėtų greičio reguliavimo, energijos balansas būtų daug prastesnis.
Reguliavimo diapazono, lygumo, efektyvumo požiūriu šis metodas panašus į nuolatinės srovės variklio greičio reguliavimą keičiant armatūros grandinės varžą. Jis naudojamas Andidžano ir Povenetso laivų vėjo ir špagato elektrinėse pavarose.
Polių porų skaičiaus pokytis.
Asinchroniniai varikliai, kuriuose trifazė statoriaus apvija gali sukurti besisukantį magnetinį lauką su skirtingu polių porų skaičiumi,
Daugumoje siurblių arba ventiliacijos sistemų slėgiui ar srautui valdyti naudojami vožtuvai, žaliuzės, droselio vožtuvai arba trijų krypčių vožtuvai. Jei sukamasis siurblio valdymas yra valdomas droselio vožtuvu, darbo taškas juda išilgai siurblio veikimo kreivės.
Reikalingas minimalus reikalingos energijos sumažinimas, palyginti su siurblio vardinio darbo taško reikalavimu. Reguliuojant siurblio galią keičiant sukimosi greitį, darbo taškas juda išilgai sistemos kreivės. Taikant šį valdymo metodą, energijos poreikis sumažėja iki trečios laipsnio, palyginti su droseliniu valdymu! Pavyzdžiui, siurbliui reikia pusės sukimosi greičio – tik aštuntadalio suvartojamos energijos.
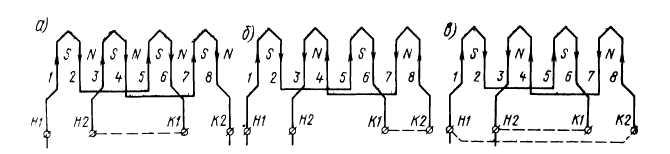
5.9 pav. Diagrama, paaiškinanti poliaus komutavimo gavimo principą
vadinami perjungiamais poliais. Sukurtos trifazės apvijos, kurias galima perjungti į skirtingą polių porų skaičių santykiu: 2:1, 5:2, 7:3, 3:1 ir kt.
Paaiškinkime polių komutuojamosios apvijos sukūrimo principą naudodamiesi vienfazės apvijos, išdėstytos aštuoniuose grioveliuose, pavyzdžiu. Apvija susideda iš dviejų pusapvijų. Jei pusapvijos sujungtos nuosekliai, tai yra, trumpiklis bus tarp gnybtų K 1 ir H 2 (5.9 pav., a), tada tokia apvija sukurs keturias polių poras (p = 4). Apvijos sukurtų polių skaičių galima rasti nurodant srovės kryptį joje ir pritaikius stulpelio taisyklę jėgos linijų aplink plyšius krypčiai nustatyti.
Jeigu pusapvijos sujungiamos nugarėlėmis, t.y. trumpiklis tarp gnybtų K 1 ir K 2 (9 pav., b), tada tokia apvija sukurs dvi poras polių (p \u003d 2). Pasirinkus srovės kryptį, laukas tarp 2 ir 3, 4 ir 5, 6 ir 7, 8 ir 1 anuliuoja vienas kitą.
Pusinės apvijos gali būti jungiamos atgal į galą, t.y. džemperiai tarp gnybtų H 1 ir K 2, H 2 ir K 1 (9 pav., c), tada apvija taip pat sukurs dvi poras polių (p = 2).
Taigi, yra du būdai perjungti apviją į mažesnį polių porų skaičių santykiu 2:1. Pirmasis būdas yra perėjimas nuo nuoseklaus pusinių apvijų prijungimo prie anti-serijinio jungimo, antrasis – nuo nuosekliojo prijungimo prie antilygiagrečiojo. Apsvarstykite kiekvieną metodą, susijusį su trifazio variklio apvija.
Pirmuoju perjungimo būdu apvija, sujungta žvaigždute, turi turėti 9 gnybtus ant skydo (5.10 pav., a), o sujungiant trikampiu – 12 gnybtų (5.10 pav., b). Po perjungimo apvijų sujungimo pobūdis nesikeičia, tai yra, žvaigždė persijungia į žvaigždę, o trikampis - į trikampį.
Variklio galia pirmuoju perjungimo būdu išlieka pastovi, todėl vardinis ir maksimalus variklio sukimo momentas keičiasi. Bendras variklio ir įvairių mechanizmų mechaninių charakteristikų svarstymas (5.10 pav., c) rodo, kad šis perjungimo būdas tinkamiausias metalo pjovimo staklių greičiui valdyti.
Jūrų elektrinėse kėlimo įtaisų pavarose plačiai naudojami vėjarodžiai, svirties, trijų greičių asinchroniniai varikliai su trimis atskiromis apvijomis ant statoriaus skirtingam polių porų skaičiui.
Antruoju perjungimo būdu žvaigždute sujungta apvija turi tik 6 laidus (5.11 pav., a). Po perjungimo gaunama dvigubos žvaigždės apvijos jungtis. Variklio galia šiuo atveju padvigubėja, o vardinis sukimo momentas išlieka pastovus.
Bendras variklio ir įvairių mechanizmų mechaninių charakteristikų svarstymas (5.11 pav., b) rodo, kad krovinio kėlimo įrenginių sukimosi greičiui valdyti patartina naudoti antrąjį perjungimo būdą.
Jei apvija prijungta trikampiu, tada perjungus pagal antrąjį metodą, gaunamas dvigubos žvaigždės jungtis. Variklio galia padidinama 15%.
Nagrinėjami paprasčiausi apvijų perjungimo būdai, kurie suteikia du greičio žingsnius. Sudėtingesniu trifazių apvijų perjungimu galite gauti daugiausiai trijų ar net keturių greičio pakopų. skirtingas polių santykis. Pavyzdžiui, MAP serijos buitiniai varikliai su viena trifaze apvija turi tris greičius (MAP-42/8-4-2, galia 0,8/1, 8/2 kW, sukimosi greitis 700/1400/2800 aps./min.) ( MAP-52/8-6-4-2, galia 1,2/2,5/3/4 kW, sukimosi greitis 460/700/920/1440 aps./min.). Daugiau nei keturi greičiai praktiškai nepasitaiko, nes apvija ir jos perjungimas yra daug sudėtingesni. Variklio MAP-52/8-6-4-2 terminalo plokštėje yra 22 laidai.
Jūrų elektrinėse kėlimo įtaisų pavarose plačiai naudojami vėjarodžiai, svirties, trijų greičių asinchroniniai varikliai su trimis atskiromis apvijomis ant statoriaus skirtingam polių porų skaičiui. Sukimosi dažnis
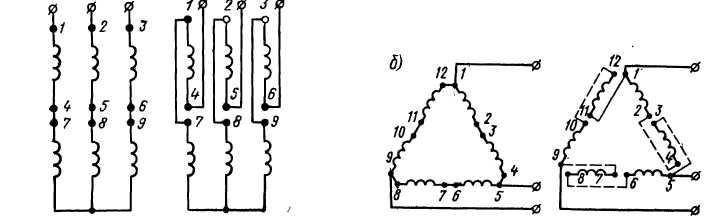
5.10 pav. Pirmasis būdas perjungti trifazę apviją, sujungtą žvaigždute,
ir trikampis, ir atitinkamos mechaninės kraujospūdžio charakteristikos.
reguliuojamas įjungiant vieną ar kitą apviją, tačiau pačios apvijos nesijungia.
Buitinė pramonė gamina kelių greičių asinchroninius MAP serijos variklius, skirtus jūrinėms elektrinėms pavaroms, kurių greičio reguliavimo diapazonas yra 6: 1 arba 7: 1. Pirmoji greičio apvija paprastai turi 26 arba 28 polius.
Polių poros perjungimo reguliavimas yra labai ekonomiškas, nes rotorius sukasi pastoviu dažniu su slydimu vardiniame diapazone, o variklio grandinėje nėra papildomų rezistorių. Rimtas šio metodo trūkumas yra gradacija ir ribotas greičių skaičius.
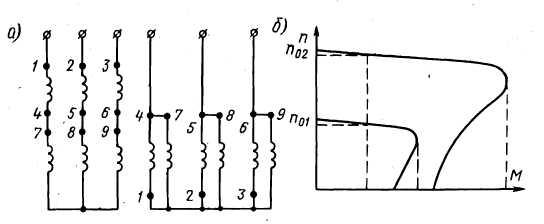
5.11 pav. Antrasis būdas perjungti trifazę apviją, sujungtą žvaigždute, ir
atitinkamos asinchroninio variklio mechaninės charakteristikos
Sukimosi greičio reguliavimas keičiant maitinimo tinklo srovės dažnį (dažnio reguliavimas).
Šis valdymo metodas pagrįstas sinchroninio greičio n 0 keitimu, kuris yra proporcingas srovės dažniui statoriaus apvijoje. Šis reglamentas reikalauja kintamo dažnio maitinimo šaltinio f. Kaip šaltinis naudojami elektromagnetiniai ir puslaidininkiniai dažnio keitikliai. Tačiau reikia nepamiršti, kad kartu su maitinimo įtampos f dažnio pasikeitimu pasikeis ir didžiausias variklio elektromagnetinis sukimo momentas. Todėl norint išlaikyti reikiamą variklio perkrovos galią, galios koeficientą ir efektyvumą, reikia keisti tinklo įtampą U vienu metu keičiant dažnį f., kad jų santykis išliktų pastovus:
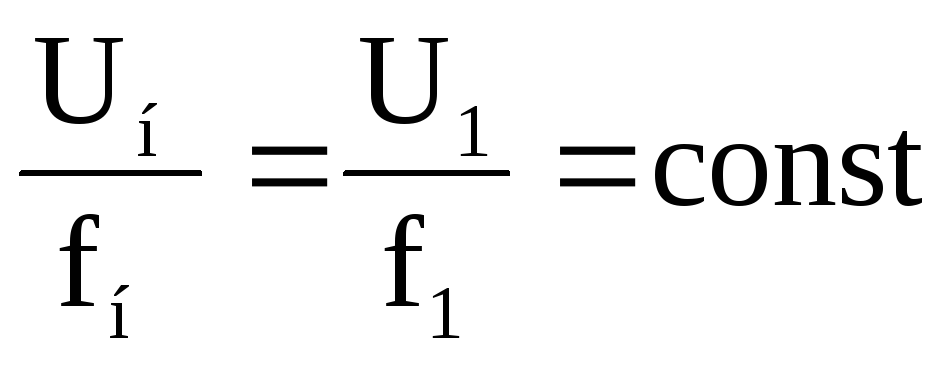
 ;
;
Dažnio valdymas leidžia sklandžiai keisti variklių sūkius plačiame diapazone (iki 12:1).
Greičio reguliavimas keičiant srovės dažnį yra racionaliausias ir ekonomiškiausias būdas. Pagrindiniai jo privalumai:
Naudojamas įprastas voverės narvelio variklis;
Variklio nuostolių reguliavimas yra ekonomiškas;
Pasiekiamas didelis reguliavimo diapazonas ir sklandumas;
Išsaugomas mechaninių charakteristikų standumas, taigi ir pavaros stabilumas;
Regeneracinį stabdymą galima atlikti beveik iki visiško sustojimo.
Tuo pačiu yra žinoma, kad laivo jėgainės srovės dažnis palaikomas pastovus ir reikalingas atskiras dažnio keitiklis variklio sūkiams reguliuoti.
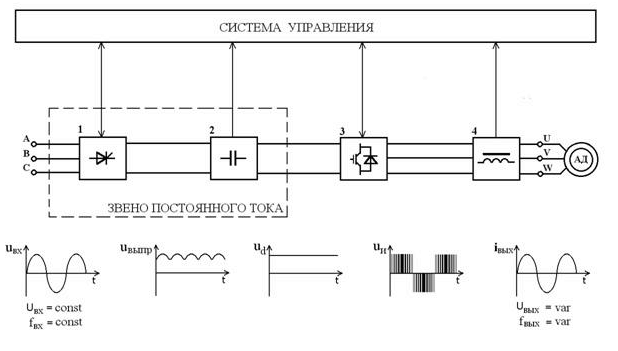
Šiuolaikinė dažnio valdoma elektrinė pavara susideda iš asinchroninio arba sinchroninio elektros variklio ir dažnio keitiklio (5.12 pav.).
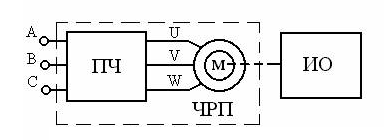
5.12 pav. Kintamo dažnio pavara
Dažnio keitiklis varo elektros variklį ir yra elektroninis statinis įtaisas. Keitiklio išvestyje generuojama kintamos amplitudės ir dažnio elektros įtampa. Pavadinimas „kintamo dažnio elektrinė pavara“ atsirado dėl to, kad variklio sūkių skaičius reguliuojamas keičiant iš dažnio keitiklio varikliui tiekiamos maitinimo įtampos dažnį.
Pastaraisiais metais laivuose plačiai ir sėkmingai pradėta diegti dažniu valdoma elektrinė pavara tiek įvairioms technologinėms problemoms spręsti, tiek elektros varymo sistemose. Taip yra visų pirma dėl to, kad buvo sukurti ir sukurti dažnio keitikliai, pagrįsti iš esmės nauja elementų baze, daugiausia naudojant IGBT izoliuotus dvipolius tranzistorius.
Sinchroniniame elektros variklyje rotoriaus greitis pastovioje būsenoje yra lygus statoriaus magnetinio lauko greičiui.
Asinchroniniame elektros variklyje rotoriaus greitis pastovioje būsenoje skiriasi nuo greičio slydimo dydžiu.
Magnetinio lauko sukimosi dažnis priklauso nuo maitinimo įtampos dažnio. Kai elektros variklio statoriaus apvija tiekiama trifaze įtampa su dažniu, susidaro besisukantis magnetinis laukas. Šio lauko sukimosi greitis nustatomas pagal gerai žinomą formulę
kur yra statoriaus polių porų skaičius.
Perėjimas nuo lauko sukimosi greičio, išmatuoto radianais, prie sukimosi dažnio, išreikšto apsisukimais per minutę, atliekamas pagal šią formulę
kur 60 yra dimensijos konversijos koeficientas.
Pakeitę lauko sukimosi greitį į šią lygtį, gauname tai
Taigi sinchroninių ir asinchroninių variklių rotoriaus greitis priklauso nuo maitinimo įtampos dažnio.
Šia priklausomybe pagrįstas dažnio reguliavimo metodas.
Keičiant dažnį keitikliu prie variklio įleidimo angos reguliuojame rotoriaus greitį.
Labiausiai paplitusioje dažnio valdomoje pavaroje, pagrįstoje asinchroniniais voverės narveliais varikliais, naudojamas skaliarinis ir vektorinis dažnio valdymas.
Su skaliariniu valdymu pagal tam tikrą dėsnį jie keičia varikliui tiekiamos įtampos amplitudę ir dažnį. Pakeitus maitinimo įtampos dažnį, nukrypstama nuo apskaičiuotų variklio didžiausių ir paleidimo momentų, efektyvumo, galios koeficiento verčių. Todėl, norint išlaikyti reikalingas variklio eksploatacines charakteristikas, reikia tuo pačiu metu keisti įtampos amplitudę keičiant dažnį.
Esamuose dažnio keitikliuose su skaliariniu valdymu maksimalaus variklio sukimo momento ir veleno pasipriešinimo momento santykis dažniausiai išlaikomas pastovus. Tai yra, pasikeitus dažniui, įtampos amplitudė kinta taip, kad maksimalaus variklio sukimo momento ir esamos apkrovos momento santykis išlieka nepakitęs. Šis santykis vadinamas variklio perkrovos galia.
Su nuolatine perkrovos galia, vardiniu galios koeficientu ir efektyvumu variklis visame greičio reguliavimo diapazone praktiškai nesikeičia.
Didžiausias variklio sukuriamas sukimo momentas nustatomas pagal tokį ryšį
kur yra pastovus koeficientas.
Todėl maitinimo įtampos priklausomybę nuo dažnio lemia elektros variklio veleno apkrovos pobūdis.
Esant pastoviam apkrovos sukimo momentui, išlaikomas santykis U/f = const, o iš tikrųjų didžiausias variklio sukimo momentas yra pastovus. Maitinimo įtampos priklausomybės nuo dažnio pobūdis atveju, kai apkrovos sukimo momentas yra pastovus, parodyta fig. 5.13(a). Tiesios linijos pasvirimo kampas grafike priklauso nuo pasipriešinimo momento verčių ir didžiausio variklio sukimo momento.
Tuo pačiu metu, esant žemiems dažniams, pradedant nuo tam tikro dažnio vertės, didžiausias variklio sukimo momentas pradeda kristi. Norėdami tai kompensuoti ir padidinti paleidimo momentą, naudojamas maitinimo įtampos lygio padidėjimas.
Esant ventiliatoriaus apkrovai, realizuojama priklausomybė U/f 2 = const. Maitinimo įtampos priklausomybės nuo dažnio pobūdis šiuo atveju parodytas 5.13 (b) pav.
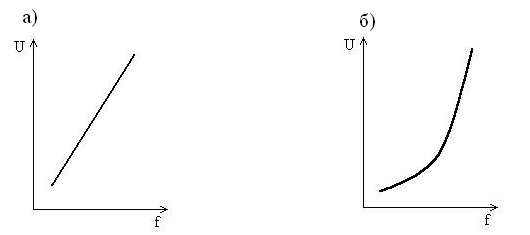
5.13 pav. Maitinimo įtampos priklausomybės nuo dažnio pobūdis:
a) esant pastoviam apkrovos sukimo momentui
b) su ventiliatoriaus apkrovos sukimo momentu
Reguliuojant žemų dažnių srityje, mažėja ir didžiausias sukimo momentas, tačiau tokio tipo apkrovai tai nėra labai svarbu.
Naudojant didžiausio sukimo momento priklausomybę nuo įtampos ir dažnio, bet kokio tipo apkrovai galima pavaizduoti U ir f.
Svarbus skaliarinio metodo privalumas yra galimybė vienu metu valdyti elektros variklių grupę.
Skaliarinio valdymo pakanka daugeliui praktinių kintamojo dažnio pavaros pritaikymų, kai variklio greičio reguliavimo diapazonas yra iki 1:40.
vektorinis valdymas leidžia žymiai padidinti valdymo diapazoną, valdymo tikslumą, padidinti elektros pavaros greitį. Šis metodas leidžia tiesiogiai valdyti variklio sukimo momentą.
Sukimo momentą lemia statoriaus srovė, kuri sukuria jaudinantį magnetinį lauką. Su tiesioginiu sukimo momento valdymu, be statoriaus srovės amplitudės ir fazės, būtina keisti, tai yra, srovės vektorių. Tai yra termino „vektoriaus kontrolė“ priežastis.
Norint valdyti srovės vektorių, taigi ir statoriaus magnetinio srauto padėtį besisukančio rotoriaus atžvilgiu, bet kuriuo metu reikia žinoti tikslią rotoriaus padėtį. Problema sprendžiama arba nuotolinio rotoriaus padėties jutiklio pagalba, arba rotoriaus padėties nustatymu skaičiuojant kitus variklio parametrus. Kaip šie parametrai naudojami statoriaus apvijų srovės ir įtampa.
VFD su vektoriniu valdymu be greičio grįžtamojo ryšio jutiklio yra pigesnis, tačiau vektorinis valdymas reikalauja daug ir didelio dažnio keitiklio skaičiavimų.
Be to, norint tiesiogiai valdyti sukimo momentą esant mažam, artimam nuliui sukimosi greičiui, dažnio valdomos elektrinės pavaros veikimas be greičio grįžtamojo ryšio yra neįmanomas.
Vektorinis valdymas su greičio grįžtamojo ryšio jutikliu suteikia valdymo diapazoną iki 1:1000 ir didesnį, greičio reguliavimo tikslumas – šimtąsias procentų dalis, sukimo momento tikslumas – kelis procentus.
Dažnio keitiklis yra įtaisas, skirtas vieno dažnio kintamąją srovę (įtampą) paversti kito dažnio kintamąja srove (įtampa).
Šiuolaikinių keitiklių išėjimo dažnis gali skirtis plačiame diapazone ir būti didesnis ir mažesnis už tinklo dažnį.
Bet kurio dažnio keitiklio grandinė susideda iš galios ir valdymo dalių. Konverterių galios dalis dažniausiai gaminama ant tiristorių arba tranzistorių, kurie veikia elektroninio jungiklio režimu. Valdymo dalis vykdoma skaitmeniniais mikroprocesoriais ir užtikrina galios elektroninių raktų valdymą bei daugybę pagalbinių užduočių (valdymas, diagnostika, apsauga).
Reguliuojamose elektrinėse pavarose naudojami dažnio keitikliai, priklausomai nuo maitinimo bloko struktūros ir veikimo principo, skirstomi į dvi klases:
1. Dažnio keitikliai su ryškia tarpine nuolatinės srovės grandimi.
2. Dažnio keitikliai su tiesioginiu pajungimu (be tarpinės nuolatinės srovės grandies).
Kiekviena iš esamų keitiklių klasių turi savo privalumų ir trūkumų, kurie lemia kiekvieno iš jų racionalaus taikymo sritį.
Konvertatoriams su tiesioginiu prijungimu (5.14 pav.) galios dalis yra valdomas lygintuvas ir gaminamas ant neužrakinamų tiristorių. Valdymo sistema paeiliui atrakina tiristorių grupes ir prijungia variklio statoriaus apvijas į elektros tinklą.
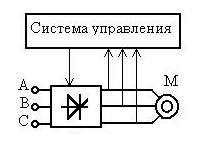
Ryžiai. 5.14 Dažnio keitiklis su tiesioginiu prijungimu
Taigi keitiklio išėjimo įtampa susidaro iš įvesties įtampos sinusoidų „nupjautų“ sekcijų. 5.15 paveiksle parodytas vienos iš apkrovos fazių išėjimo įtampos generavimo pavyzdys.
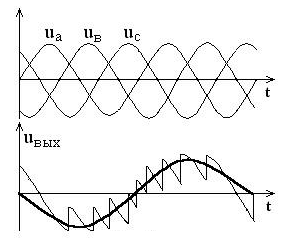
5.15 pav. Išėjimo įtampos susidarymas vienai iš apkrovos fazių
Keitiklio įėjime veikia trifazė sinusinė įtampa u a, u v, u s. Išėjimo įtampa u out turi nesinusinę "pjūklo danties" formą, kurią sąlyginai galima aproksimuoti sinusoidu (stora linija). Iš paveikslo matyti, kad išėjimo įtampos dažnis negali būti lygus arba didesnis už maitinimo tinklo dažnį. Jis yra diapazone nuo 0 iki 30 Hz. Dėl to nedidelis variklio sūkių skaičiaus reguliavimo diapazonas (ne daugiau kaip 1:10). Šis apribojimas neleidžia naudoti tokių keitiklių šiuolaikinėse dažnio valdomose pavarose su plačiu technologinių parametrų valdymu.
Neužrakinamų tiristorių naudojimui reikalingos gana sudėtingos valdymo sistemos, o tai padidina keitiklio kainą.
Konverterio išvestyje „nupjauta“ sinusinė banga yra aukštesnių harmonikų šaltinis, dėl kurio atsiranda papildomų nuostolių elektros variklyje, elektros mašinos perkaitimas, sukimo momento sumažėjimas, labai stiprūs trikdžiai maitinimo tinkle. Naudojant kompensacinius įrenginius, padidėja sąnaudos, svoris, matmenys ir sumažėja efektyvumas. sistemos kaip visuma.
Kartu su išvardintais tiesioginio ryšio keitiklių trūkumais jie turi ir tam tikrų privalumų. Jie apima:
Praktiškai didžiausias efektyvumas, palyginti su kitais keitikliais (98,5% ir daugiau),
Galimybė dirbti su aukšta įtampa ir srovėmis, todėl jas galima naudoti galingose aukštos įtampos pavarose,
Santykinis pigumas, nepaisant absoliučių sąnaudų padidėjimo dėl valdymo grandinių ir papildomos įrangos.
Panašios keitiklių grandinės naudojamos senose pavarose, o naujos konstrukcijos praktiškai nėra sukurtos.
Šiuolaikinėse kintamo dažnio pavarose plačiausiai naudojami keitikliai su ryškia nuolatinės srovės jungtimi (5.16. pav.).
Šios klasės keitikliai naudoja dvigubą elektros energijos konvertavimą: pastovios amplitudės ir dažnio įėjimo sinusoidinė įtampa lygintuve ištaisoma (V), filtruojama filtru (F), išlyginama ir vėl konvertuojama keitikliu (I). ) į kintamą kintamo dažnio ir amplitudės įtampą. Dvigubas energijos konvertavimas sumažina efektyvumą. ir tam tikrą svorio ir dydžio rodiklių pablogėjimą, palyginti su keitikliais su tiesioginiu ryšiu.
5.16 pav. Dažnio keitiklis su nuolatinės srovės jungtimi
Sinusoidinei kintamajai įtampai formuoti naudojami autonominiai įtampos keitikliai ir autonominiai srovės keitikliai.
Inverteriuose kaip elektroniniai jungikliai naudojami rakinami tiristoriai GTO ir jų pažangios modifikacijos GCT, IGCT, SGCT bei izoliuotų vartų dvipoliai tranzistoriai IGBT.
Pagrindinis tiristorių dažnio keitiklių privalumas, kaip ir tiesioginio ryšio grandinėje, yra galimybė dirbti su didelėmis srovėmis ir įtampomis, atlaikant nuolatinę apkrovą ir impulsų poveikį.
Jie turi didesnį efektyvumą (iki 98%), palyginti su IGBT tranzistorių keitikliais (95–98%).
Tiristorių pagrindu pagaminti dažnio keitikliai šiuo metu užima dominuojančią padėtį aukštos įtampos pavarose, kurių galia yra nuo šimtų kilovatų iki dešimčių megavatų, kurių išėjimo įtampa yra 3–10 kV ir didesnė. Tačiau jų kaina už kW išėjimo galios yra didžiausia aukštos įtampos keitiklių klasėje.
Dar visai neseniai GTO dažnio keitikliai buvo pagrindinė žemos įtampos kintamo dažnio pavaros dalis. Tačiau atsiradus IGBT tranzistoriams, įvyko „natūrali atranka“, ir šiandien jais pagrįsti keitikliai yra visuotinai pripažinti lyderiai žemos įtampos kintamo dažnio pavaros srityje.
Tiristorius yra pusiau valdomas įrenginys: norint jį įjungti, pakanka į valdymo išvestį įvesti trumpą impulsą, tačiau norint jį išjungti, reikia arba įjungti atvirkštinę įtampą, arba sumažinti įjungiamą srovę iki nulio. Tam reikalinga sudėtinga ir sudėtinga tiristoriaus dažnio keitiklio valdymo sistema.
Izoliuotų vartų dvipoliai tranzistoriai IGBT skiriasi nuo tiristorių pilnu valdymu, paprasta mažos galios valdymo sistema, didžiausiu veikimo dažniu
Dėl to IGBT pagrindu sukurti dažnio keitikliai leidžia išplėsti variklio greičio reguliavimo diapazoną ir padidinti visos pavaros greitį.
Asinchroniniam vektoriui valdomai pavarai IGBT keitikliai leidžia veikti mažu greičiu be grįžtamojo ryšio jutiklio.
Naudojant IGBT su didesniu perjungimo dažniu kartu su mikroprocesorine valdymo sistema dažnio keitikliuose, sumažėja tiristoriniams keitikliams būdingų aukštesnių harmonikų lygis. Dėl to atsiranda mažiau papildomų nuostolių elektros variklio apvijose ir magnetinėje grandinėje, sumažėja elektros mašinos įkaitimas, sumažėja sukimo momento bangavimas ir pašalinamas vadinamasis rotoriaus „vaikščiojimas“. žemo dažnio regione. Sumažėja nuostoliai transformatoriuose, kondensatorių baterijose, pailgėja jų tarnavimo laikas ir laidų izoliacija, sumažėja apsauginių įtaisų klaidingų aliarmų ir indukcinių matavimo prietaisų klaidų skaičius.
IGBT tranzistorių pagrindu veikiantys keitikliai, lyginant su tiristoriniais konverteriais, turinčiais tą pačią išėjimo galią, yra mažesnio dydžio, svorio, dėl modulinės elektroninių jungiklių konstrukcijos didesnio patikimumo, geresnio šilumos pašalinimo nuo modulio paviršiaus bei mažiau konstrukcinių elementų.
Jie suteikia pilnesnę apsaugą nuo viršįtampio srovės ir viršįtampio, o tai žymiai sumažina gedimų ir pavaros pažeidimo tikimybę.
Šiuo metu žemos įtampos IGBT keitikliai turi didesnę kainą už išėjimo galios vienetą dėl santykinio tranzistorių modulių gamybos sudėtingumo. Tačiau pagal kainos ir kokybės santykį, remiantis išvardintais privalumais, jie akivaizdžiai lenkia tiristorinius keitiklius, be to, per pastaruosius metus nuolat mažėjo IGBT modulių kainos.
Pagrindinė kliūtis juos naudoti aukštos įtampos pavarose su tiesioginiu dažnio keitimu ir esant didesnei nei 1–2 MW galiai šiuo metu yra technologiniai apribojimai. Padidėjus perjungimo įtampai ir darbinei srovei, padidėja tranzistoriaus modulio dydis, be to, reikalingas efektyvesnis šilumos pašalinimas iš silicio kristalo.
Naujos bipolinių tranzistorių gamybos technologijos yra skirtos šiems apribojimams įveikti, o IGBT panaudojimo pažadas yra labai didelis ir aukštos įtampos pavarose. Šiuo metu IGBT tranzistoriai naudojami aukštos įtampos keitikliuose kelių atskirų modulių, sujungtų nuosekliai, pavidalu.
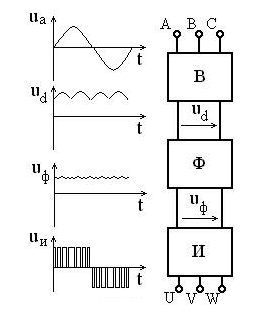
Tipiška žemos įtampos IGBT dažnio keitiklio schema parodyta fig. 5.17 Paveikslo apačioje yra kiekvieno keitiklio elemento išėjimo įtampų ir srovių grafikai.
Maitinimo tinklo kintamoji įtampa (u in) su pastovia amplitudė ir dažniu (U in = const, f in = const) tiekiama į valdomą arba nevaldomą lygintuvą (1).
Filtras (2) naudojamas išlygintos įtampos (u rect.) bangavimui išlyginti. Lygintuvas ir talpinis filtras (2) sudaro nuolatinės srovės jungtį.
Iš filtro išėjimo pastovi įtampa u d tiekiama į autonominio impulsinio keitiklio (3) įėjimą.
Šiuolaikinių žemos įtampos keitiklių autonominis keitiklis, kaip minėta, yra pagrįstas galios dvipoliais tranzistoriais su izoliuotais vartais IGBT. Aptariamame paveikslėlyje parodyta dažnio keitiklio grandinė su autonominiu įtampos keitikliu kaip plačiausiai naudojama.
Ryžiai. 5.17 Tipinė IGBT dažnio keitiklio grandinė
Inverteris konvertuoja nuolatinę įtampą u d į trifazę (arba vienfazę) impulsinę įtampą u ir kintamą amplitudę bei dažnį. Pagal valdymo sistemos signalus kiekviena elektros variklio apvija per atitinkamus keitiklio galios tranzistorius prijungiama prie nuolatinės srovės grandinės teigiamų ir neigiamų polių. Kiekvienos apvijos prijungimo trukmė impulsų pasikartojimo laikotarpiu yra moduliuojama pagal sinusoidinį dėsnį. Didžiausias impulsų plotis suteikiamas pusės ciklo viduryje ir mažėja pusės ciklo pradžioje ir pabaigoje. Taigi valdymo sistema užtikrina variklio apvijų įtampos impulsų pločio moduliavimą (PWM). Įtampos amplitudę ir dažnį lemia moduliuojančios sinusinės funkcijos parametrai.
Esant aukštam PWM nešlio dažniui (2 ... 15 kHz), variklio apvijos veikia kaip filtras dėl didelio induktyvumo. Todėl juose teka beveik sinusinės srovės.
Konverterių su valdomu lygintuvu (1) grandinėse įtampos amplitudės pokytis u ir gali būti pasiektas reguliuojant pastovios įtampos dydį u d , o dažnio pokytis yra keitiklio veikimo režimas.
Jei reikia, autonominio keitiklio išėjime įrengiamas filtras (4), kuris išlygins srovės bangavimą. (IGBT keitiklių grandinėse dėl žemo aukštesnių harmonikų lygio išėjimo įtampoje filtro praktiškai nereikia.)
Taigi dažnio keitiklio išėjime susidaro trifazė (arba vienfazė) kintamo dažnio ir amplitudės kintamoji įtampa (U out = var, f out = var).
Ilgis ir atstumas Masė Birių produktų ir maisto produktų tūrio matai Plotas Tūris ir matavimo vienetai kulinariniuose receptuose Temperatūra Slėgis, mechaninis įtempis, Youngo modulis Energija ir darbas Galia Jėga Laikas Linijinis greitis Plokščias kampas Šiluminis efektyvumas ir kuro efektyvumas Skaičiai informacijos kiekis Valiutų kursai Matmenys moteriški drabužiai ir avalynė Vyriškų drabužių ir avalynės matmenys Kampinis greitis ir sukimosi greitis Pagreitis Kampinis pagreitis Tankis Savitasis tūris Inercijos momentas Jėgos momentas Sukimo momentas Savitasis kaloringumas (pagal masę) Energijos tankis ir savitasis kuro kaloringumas ( pagal tūrį) Temperatūros skirtumas Šilumos plėtimosi koeficientas Šiluminė varža Šilumos laidumas Savitoji šiluminė talpa Energijos poveikis, šiluminės spinduliuotės galia Šilumos srauto tankis Šilumos perdavimo koeficientas Tūrio srautas Masės srautas Molinis srautas Masės srauto tankis Molinė koncentracija Masė k koncentracija tirpale Dinaminė (absoliutinė) klampumas Kinematinė klampumas Paviršiaus įtempis Garų pralaidumas Garų pralaidumas, garų perdavimo greitis Garso lygis Mikrofono jautrumas Garso slėgio lygis (SPL) Ryškumas Šviesos intensyvumas Apšvietimas Skiriamoji geba kompiuterinėje grafikoje Dažnis ir bangos ilgis Optinė galia dioptrijomis ir židinio nuotolis Opt. dioptrijomis ir objektyvo padidinimu (×) Elektros krūvis Linijinis krūvio tankis Paviršiaus krūvio tankis Tūrinis krūvio tankis Elektros srovė Linijinis srovės tankis Paviršiaus srovės tankis Elektrinio lauko stipris Elektrostatinis potencialas ir įtampa Elektrinė varža Elektrinė varža Elektros laidumas Elektros laidumas Elektros talpa Induktyvumas Amerikietiškas laidų matuoklis Lygiai in dBm (dBm arba dBmW), dBV (dBV), vatai ir kt. vienetai Magnetovaros jėga Magnetinio lauko stiprumas Magnetinis prakaitas gerai Magnetinė indukcija Jonizuojančiosios spinduliuotės sugertosios dozės galia Radioaktyvumas. Radioaktyvusis skilimas Radiacija. Ekspozicijos dozė Radiacija. Sugertoji dozė Dešimtainiai priešdėliai Duomenų perdavimas Tipografija ir vaizdo apdorojimas Medienos tūrio vienetai Molinės masės skaičiavimas Periodinė D. I. Mendelejevo cheminių elementų sistema
1 apsisukimas per minutę [rpm] = 6,00000000000002 laipsnių per sekundę [°/s]
Pradinė vertė
Konvertuota vertė
radianais per sekundę radianais per dieną radianais per valandą radianais per minutę laipsniais per dieną laipsniais per valandą laipsniais per minutę laipsniais per sekundę apsisukimais per dieną apsisukimais per valandą apsisukimais per minutę apsisukimais per sekundę apsisukimais per metus apsisukimais per mėnesį apsisukimais per savaitę laipsniais per metus laipsniais per mėnesio laipsnių per savaitę radianai per metus radianai per mėnesį radianai per savaitę
Daugiau apie kampinį greitį

Bendra informacija
Kampinis greitis – vektorinis dydis, nusakantis kūno sukimosi greitį sukimosi ašies atžvilgiu. Šis vektorius yra nukreiptas statmenai sukimosi plokštumai ir nustatomas naudojant gimlet taisyklę. Kampinis greitis matuojamas kaip santykis tarp kampo, kuriuo kūnas pasislinko, tai yra kampinio poslinkio, ir jam praleisto laiko. SI sistemoje kampinis pagreitis matuojamas radianais per sekundę.
Kampinis greitis sportuojant
Kampinis greitis dažnai naudojamas sportuojant. Pavyzdžiui, sportininkai sumažina arba padidina golfo lazdos, lazdos ar raketės kampinį greitį, kad pagerintų našumą. Kampinis greitis yra susietas su linijiniu greičiu, todėl iš visų atkarpos taškų, besisukančių aplink šios atkarpos tašką, ty aplink sukimosi centrą, toliausiai nuo šio centro esantis taškas juda didžiausiu tiesiniu greičiu. Pavyzdžiui, jei golfo lazda sukasi, tos lazdos galas, esantis toliausiai nuo sukimosi centro, juda didžiausiu tiesiniu greičiu. Tuo pačiu metu visi šios atkarpos taškai juda tuo pačiu kampiniu greičiu. Todėl, pailgindamas lazdą, lazdą ar raketę, sportininkas padidina ir linijinį greitį, o atitinkamai ir smūgio greitį, perduodamą kamuoliukui, kad jis galėtų nuskristi didesnį atstumą. Raketės ar lazdos sutrumpinimas, netgi pertraukimas žemiau nei įprastai, priešingai, sulėtina smūgio greitį.


Aukšti žmonės su ilgomis galūnėmis turi pranašumą linijinio greičio atžvilgiu. Tai yra, judindamos kojas tuo pačiu kampiniu greičiu, jos judina pėdas didesniu tiesiniu greičiu. Tas pats atsitinka su jų rankomis. Šis pranašumas gali būti viena iš priežasčių, kodėl primityviose visuomenėse vyrai medžiojo daugiau nei moterys. Tikėtina, kad dėl to evoliucijos procese naudos gavo ir aukštesni žmonės. Ilgos galūnės padėdavo ne tik bėgiojant, bet ir medžiojant – ilgos rankos didesniu tiesiniu greičiu mėtė ietis ir akmenis. Kita vertus, ilgos rankos ir kojos gali sukelti nepatogumų. Ilgos galūnės turi daugiau svorio ir reikalauja papildomos energijos joms judėti. Be to, kai žmogus bėga greitai, ilgos kojos juda greičiau, o tai reiškia, kad susidūrus su kliūtimi smūgis bus stipresnis nei žmonėms su trumpomis kojomis, judantiems tuo pačiu linijiniu greičiu.
Gimnastika, dailusis čiuožimas ir nardymas taip pat naudoja kampinį greitį. Jei sportininkas žino kampinį greitį, tada lengva apskaičiuoti apsivertimų ir kitų akrobatikos skaičių šuolio metu. Per salto sportininkai dažniausiai laiko kojas ir rankas kuo arčiau kūno, kad sumažintų inerciją ir padidintų pagreitį, taigi ir kampinį greitį. Kita vertus, nardymo ar tūpimo metu teisėjai žiūri, ar sportininkas nusileido tiesiai. Dideliu greičiu sunku valdyti skrydžio kryptį, todėl sportininkai sąmoningai sulėtina kampinį greitį, šiek tiek ištiesdami rankas ir kojas nuo kūno.
Sportininkai, metantys diską ar kūjį, taip pat kontroliuoja linijinį greitį kampinio pagalba. Jei tik messite plaktuką, nesukdami jo ratu ant ilgos plieninės vielos, kuri padidina linijinį greitį, tada metimas nebus toks stiprus, todėl pirmiausia sukasi plaktukas. Olimpiados sportininkai apsisuka aplink savo ašį tris ar keturis kartus, kad padidintų savo kampinį greitį iki didžiausio įmanomo.
Kampinis greitis ir duomenų saugojimas optinėse laikmenose

Kai duomenys įrašomi į optines laikmenas, pvz., kompaktinius diskus (CD), įrenginys taip pat naudoja kampinį ir linijinį greitį, kad išmatuotų duomenų įrašymo ir skaitymo greitį. Yra keli duomenų įrašymo būdai, kurių metu naudojamas kintamasis arba pastovus tiesinis arba kampinis greitis. Taigi, pavyzdžiui, režimas pastovus tiesinis greitis(angliškai – Constant Linear Velocity arba CVL) – vienas pagrindinių diskų įrašymo būdų, kai duomenys įrašomi vienodu greičiu per visą disko paviršių. Įrašymo metu zoninis pastovus tiesinis greitis(anglų kalba - Zone Constant Linear Velocity arba ZCLV) įrašymo metu tam tikroje dalyje, tai yra disko zonoje, palaikomas pastovus greitis. Tokiu atveju diskas sulėtės įrašant išorinėse zonose. Režimas dalinai pastovus kampinis greitis(Partial Constant Angular Velocity arba PCAV) leidžia įrašyti laipsniškai didinant kampinį greitį, kol pasiekia tam tikrą slenkstį. Po to kampinis greitis tampa pastovus. Paskutinis įrašymo režimas – režimas pastovus kampinis greitis(Pastovus kampinis greitis arba CAV). Šiuo režimu įrašymo metu išlaikomas toks pat kampinis greitis visame disko paviršiuje. Tokiu atveju linijinis greitis didėja, kai įrašymo galvutė vis labiau juda link disko krašto. Šis režimas taip pat naudojamas įrašant įrašus ir kompiuterio standžiuosius diskus.
Kampinis greitis erdvėje
35 786 kilometrų (22 236 mylių) atstumu nuo Žemės yra orbita, kurioje sukasi palydovai. Tai ypatinga orbita, nes kūnai, skriejantys aplink ją ta pačia kryptimi kaip ir Žemė, visą orbitą užbaigia maždaug per tiek pat laiko, kiek Žemė apskrieja visą ratą aplink savo ašį. Tai yra šiek tiek mažiau nei 24 valandos, tai yra viena siderinė diena. Kadangi kampinis kūnų sukimosi greitis šioje orbitoje yra lygus kampiniam Žemės sukimosi greičiui, stebėtojams iš Žemės atrodo, kad šie kūnai nejuda. Tokia orbita vadinama geostacionarus.
Šią orbitą dažniausiai iškelia orų pokyčius stebintys palydovai (meteorologiniai palydovai), vandenyno pokyčius stebintys ir ryšių palydovai, teikiantys televizijos ir radijo transliacijas, telefono ryšį ir palydovinį internetą. Geostacionari orbita dažnai naudojama palydovams, nes antenos, vieną kartą nukreiptos į palydovą, nebereikia nukreipti. Kita vertus, tokie nepatogumai yra susiję su jų naudojimu, pavyzdžiui, būtinybė turėti tiesioginį matymo lauką tarp antenos ir palydovo. Be to, geostacionari orbita yra toli nuo Žemės ir signalui perduoti reikia naudoti galingesnius siųstuvus, nei naudojami iš žemesnių orbitų. Signalas ateina su maždaug 0,25 sekundės vėlavimu, o tai pastebima vartotojams. Pavyzdžiui, žinių transliacijos metu korespondentai atokiose vietovėse dažniausiai susisiekia su studija per palydovinį ryšį; tuo pačiu pastebima, kad televizijos laidų vedėjui uždavus klausimą, jie atsako pavėluotai. Nepaisant to, palydovai geostacionarioje orbitoje yra plačiai naudojami. Pavyzdžiui, dar visai neseniai ryšys tarp žemynų buvo vykdomas daugiausia palydovų pagalba. Dabar jį iš esmės pakeitė tarpžemyniniai kabeliai, einantys palei vandenyno dugną; tačiau palydovinis ryšys vis dar naudojamas atokiose vietovėse. Per pastaruosius dvidešimt metų ryšių palydovai taip pat suteikė prieigą prie interneto, ypač atokiose vietose, kur nėra antžeminės ryšių infrastruktūros.

Palydovo eksploatavimo laikas daugiausia priklauso nuo laive esančio kuro kiekio, reikalingo periodinei orbitos korekcijai. Degalų kiekis palydovuose yra ribotas, todėl jam pasibaigus palydovai nutraukiami. Dažniausiai jie perkeliami į kapinių orbitą, tai yra daug aukštesnę nei geostacionarią orbitą. Tai brangus procesas; tačiau jei nereikalingi palydovai paliekami geostacionarioje orbitoje, tai gresia susidūrimo su kitais palydovais galimybe. Erdvė geostacionarioje orbitoje yra ribota, todėl seni palydovai, likę orbitoje, užims vietą, kurią galėtų panaudoti naujas palydovas. Šiuo atžvilgiu daugelyje šalių galioja taisyklės, pagal kurias palydovų savininkai turi pasirašyti susitarimą, kad pasibaigus eksploatacijai palydovas bus patalpintas į kapinių orbitą.
„Unit Converter“ straipsnius redagavo ir iliustravo Anatolijus Zolotkovas
Ar jums sunku išversti matavimo vienetus iš vienos kalbos į kitą? Kolegos pasiruošusios jums padėti. Paskelbkite klausimą TCTerms ir per kelias minutes gausite atsakymą.
Vienetų konvertavimo keitiklyje skaičiavimai " Kampinis greitis ir sukimosi greitis“ yra atliekami naudojant unitconversion.org funkcijas.