Регулювання частоти обертання електроприводів є одним із найважливіших завдань сучасної електротехніки. Розробка та застосування раціональних способів регулювання дозволяють підвищити продуктивність механізмів, покращити якість продукції, спростити механічну частину приводу, зменшити витрату електроенергії тощо.
Вихідна частота генератора одна із важливих параметрів, визначальних рейтинг генератора. Електричний вихід генератора повинен підтримуватися на фіксованій частоті 50 Гц або 60 Гц, щоб відповідати вихідному сигналу стандартної електричної мережіабо частотної характеристики ваших приладів. Ви також можете зіткнутися з різними ізольованими ділянками однієї сітки, що працюють на різних частотах. Потім стає необхідним змінювати вихідну частоту генератора відповідно до потужності приладів, які живляться, або сітки, до якої підключено ваш генератор.
З регулюванням частоти обертання не слід змішувати природну зміну частоти обертання електродвигуна відповідно до його механічної характеристики, коли змінюється навантаження на валу приводу. Регулювання – це примусова зміна частоти обертання електроприводу залежно від вимог приводного механізму.
Зміна частоти обертання двигуна до вихідної частоти. Сучасні генератори складаються з двигуна, безпосередньо підключеного до генератора змінного струмудля електроенергії. Одним із найбільш поширених способів зміни вихідної частоти генератора є зміна швидкості обертання двигуна.
Два фактори пов'язані за такою формулою -. У разі невеликих або житлових генераторів ви можете змінити налаштування обертів двигуна, внісши кілька змін на панелі керування вашого пристрою. Виконайте такі кроки, щоб змінити частоту генератора від 60 Гц до 50 Гц.
Будь-який спосіб регулювання характеризують такі основні показники:
діапазон регулювання - відношення максимальної частоти обертання до мінімальної, що можна отримати приводі тобто. ;
плавність регулювання - кількість стійких швидкостей, одержуваних у цьому діапазоні регулювання;
економічність - облік витрат, пов'язаних із створенням самого способу регулювання, та додаткових втрат енергії, що виникають у приводі;
Контролери генератора здійснюють моніторинг та керування в реальному часі. Вбудовані функції захисту автоматично відключають ваш генератор у разі надмірної кількості обертів двигуна або дуже низької вихідної частоти. Як працюють генератори. Перетворювач частоти Якщо ви використовуєте генератор з фіксованою швидкістю, ви можете підключити частотний перетворювач до вашого пристрою. Частотний перетворювач являє собою комбінацію випрямляча та інвертора. Випрямляч використовує генератор змінного струму для створення постійного струму.
стабільність роботи приводу – зміна частоти обертання при зміні моменту на валу двигуна. Стабільність роботи цілком визначається жорсткістю механічних характеристик;
напрям регулювання показує, що частота обертання змінюється тільки вниз або тільки вгору від основної частоти обертання приводу або можливе регулювання і вгору і вниз.
Будь-яка супутня зміна напруги пов'язана з призначенням пристрою, а також залежить від програми, для якої використовується частотний перетворювач. Традиційно частотні перетворювачі, такі як перетворювачі поворотні і мотор-генераторні установки, були виготовлені з електромеханічних компонентів. З появою твердотільних електроніки вони тепер побудовані як повністю електронні блоки.
Економічне обґрунтування ефекту від інвертора
Частотні перетворювачі також знаходять застосування в аерокосмічній промисловості для перетворення 50 Гц або 60 Гц на вихід 400 Гц, який використовується в наземному силовий агрегатлітаків. Ці системи також використовуються для управління швидкістю вентиляторів і насосів та інших навантажень зі змінним крутним моментом, що працюють на змінній швидкості.
Частоту обертання ротора асинхронного двигуна визначають за такою формулою:
де f-Частина змінного струму; р - кількість пар полюсів статора обмотки; s – ковзання.
З наведеної вище формули можна зробити висновок, що частоту обертання асинхронного двигунаможна регулювати зміною однієї з трьох величин:
Електронні генератори зі змінною швидкістю Існує спеціальний клас генераторів, відомих як електронні перетворювачі зі змінною швидкістю, у яких зміна швидкості двигуна змінює швидкість генератора змінного струму, щоб автоматично виробляти вихід змінної частоти. Перетворювач частоти потім використовується для корекції вихідного сигналу генератора відповідно до необхідної частоти вихідної 50 Гц або 60 Гц. Використання цього пристрою позбавляє необхідності використання приводу зі змінною швидкістю і трансформатора.
Ковзання s;
Числа пар полюсів магнітного потоку статора p;
Частоти струму у статорі f.
Розглянемо можливості регулювання частоти обертання ротора шляхом зміни ковзання. Ковзання є функцією багатьох параметрів двигуна:
s = f(R 1 , X 1 ;R 2 ; X 2 ; U),
де R 1 X 1 - активний та індуктивний опір ланцюга статора,; R 2 Х 2 - те ж, ротора;
Недоліком цієї технології є те, що електронний компонент, крім дорожнечі, не підходить для використання в грубому середовищі, в якому зазвичай працює генератор. Важливо, що вони відрізняються від генераторів зі змінною швидкістю, які мають безступінчасту трансмісію, що дозволяє змінювати оберти двигуна, але підтримує постійну швидкістьгенератора. Не змінює вихідну частоту, але дозволяє генератору змінювати вихідну потужність генератора задоволення вимог змінної навантаження.
На наступному малюнку показано еквівалентну модель ланцюга блоку асинхронного двигуна. Це означає, що при запуску прослизання дорівнює одиниці, а при синхронної роботиз частотою живлення – нуль. Цей параметр можна налаштувати в термінах параметрів попередньої еквівалентної схеми або в термінах рейтингів двигуна, які використовуються блоком для отримання цих параметрів.
U – напруга живлення двигуна.
З формули видно, що для зміни ковзання s можна вводити додаткові резистори або індуктивності ланцюга обмоток статора або ротора або зменшувати напругу живлення двигуна.
Зміна напруги.
Відомо, що максимальний момент асинхронного двигуна пропорційний квадрату напруги мережі та механічні характеристики при різних напругах мають вигляд, показаний на рис.5.8, a. Аналіз цих характеристик спільно з характеристикою моменту опору Мс.г вантажопідйомного пристрою показує, що регулювання частоти обертання можливе дуже вузькому діапазоні. При напрузі 0,6 U н двигун не запуститься, оскільки Мп<Мс.г, а при снижении напряжения ниже 0,6 UB работающий двигатель остановится.
Блок має два додаткові теплові порти, по одному на обмотку, приховані за умовчанням. Ця дія відображає теплові порти на значку блоку та додає вкладки «Залежність температури» та «Термальний порт» до діалогового вікна блоку. Ці вкладки описані далі на цій сторінці.
Основні припущення та обмеження
Використовуйте термічні порти для імітації впливу втрат опору міді, які перетворюють електроенергію на тепло. Моделювання термічних ефектів у обертальних та трансляційних приводах. Модель ґрунтується на наступних припущеннях. Блок не моделює пусковий механізм однофазного асинхронного двигуна. . Виберіть один із наведених нижче методів установки блоку.
Дещо краще регулювання двигуна, що обертає механізм з вентиляторним моментом опору Мс.в, - діапазон регулювання розширюється.
Зміна параметрів R1, X1, X2.
Збільшення зазначених параметрів надає майже такий вплив на механічні характеристики двигуна, як зниження напруги, а підвищення опору R 1 до того ж ще збільшує втрати енергії в ланцюгу статора.
Як підключити частотний перетворювач
За еквівалентними параметрами схеми – вкажіть електричні параметри для еквівалентної схеми двигуна. За рейтингом двигуна. . Опір статора обмотки. Цей параметр відображається лише при виборі параметрів еквівалентної схеми для параметра параметризації моделі.
Як змінити швидкість роботи двигуна?
Опір ротора, заданий щодо статора. Індуктивність статора обмотки. Індуктивність ротора, задана щодо статора. Намагнічує індуктивність статора. Його значення важко оцінити за параметрами двигуна, але ефект зазвичай малий. Механічна потужність, яку двигун забезпечує під час роботи з номінальною швидкістю. Цей параметр відображається лише при виборі значення «Мотор» для параметра параметризації моделі.
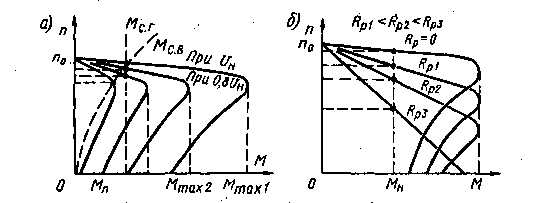
Рис.5.8 Механічні характеристики асинхронного двигуна за зміни
напруги та активного опору ланцюга ротора
Наприкінці 50-х набув деяке поширення так званий дросельний електропривод, в якому збільшення опору X 1 досягалося включенням в ланцюг статора магнітного підсилювача (дроселя насичення). Головний недолік таких електроприводів (у тому числі при зміні напруги U) полягає в тому, що потужність ковзання повністю перетворюється на тепло в роторі, збільшуючи перегрів двигуна. У дросельних електроприводах також зменшується коефіцієнт потужності cosf.
Швидкість, з якою двигун забезпечує задане номінальне значення механічної потужності. Лінійна напруга, за якої вказані номінальні значення двигуна. Значення за замовчуванням – 60 герц. Лінійний струм, у якому двигун доставляє задане номінальне значення механічної потужності.
Окупність перетворювача частоти
Із ефективності двигуна. . Відсоток вхідної потужності двигуна, який доставляється на механічне навантаження під час роботи з номінальним значенням швидкості. Косинус кута, на якому струм живлення відстає від напруги живлення під час роботи при номінальній величині механічної потужності.
Зі сказаного випливає, що збільшення параметрів R 1 X 1 Х 2 або зменшення U не тільки задля регулювання частоти обертання, а й через якісь інші причини (наприклад, вплив параметрів мережі) для асинхронного двигуна вкрай небажано.
Зміна активного опору ланцюга ротора.
Єдиний параметр асинхронного двигуна, від якого не залежить максимальний момент двигуна, – це опір R2. Отже, при введенні в ланцюг ротора додаткових резисторів зберігається механічна здатність перевантажувального двигуна і, що дуже важливо, втрати енергії виділяються в основному на резисторах, тобто за межами двигуна.
Як обслуговувати частотні перетворювачі?
Виміряний опір статора. Загальна кількість пар полюсів двигуна. Виберіть одну з наступних конфігурацій двигуна. Конфігурація зірочки - Підключіть обмотки статора двигуна до зірки. . Напруга між лініями, що подає двигун.
Швидкість ротора на початку моделювання. Коефіцієнти температури опору. Вектор 1 на 2 рядки, що визначає коефіцієнт в рівнянні, що відноситься до опору температурі, як описано в термічній моделі для блоків виконавчих механізмів. Перший елемент відповідає статору, а другий – ротору.
Такий спосіб застосовується тільки для двигунів з фазним ротором і з кільцями. Опір короткозамкнутого ротора змінювати практично неможливо. Механічні характеристики при різних опорах ротора показано на рис.5.8, б.
Коротко процес регулювання виглядає так: М=Мс, n=const;  -
- -
- -
- -
- -
- -
- -
- . Запис пояснюється формулами (2-6).
. Запис пояснюється формулами (2-6).
Температура, на яку визначено параметри двигуна. Ця вкладка відображається лише для блоків із відкритими тепловими портами. У розділі Термічні порти. Вектор 1 на 2 рядки, що визначає теплову масу для обмоток статора та ротора. Теплова маса – це енергія, необхідна підвищення температури на один градус.
Вектор 1 на 2 рядки, що визначає температуру теплових портів статора та ротора на початку моделювання. Блок має такі порти. Механічний ротаційний порт. Роль турбіни полягає у перетворенні енергії води, пари або вітру на механічну енергію, яка змусить генератор обертатися. Генератор перетворює механічну енергію на електрику. У гідроелектростанціях ця комбінація генератора та турбіни називається генераторною установкою.
З погляду діапазону регулювання, плавності, економічності цей спосіб аналогічний регулюванню частоти обертання двигуна постійного струму зміною опору ланцюга якоря. Він застосовується в електроприводах брашпиля та шпиля судів типів «Андіжан», «Повенець».
Зміна числа пар полюсів.
Асинхронні двигуни, у яких трифазна обмотка статора може створювати магнітне поле, що обертається, з різним числом пар полюсів,
Вода, що рухається, змушує обертання турбіни
У цьому генераторному блоці вода пробирається через затвор і прокручування. Він повертає лопатки турбіни і потім тягнеться до осі турбіни для виходу через нижню тягу. Механічна енергія, створювана величезною силою, яка штовхає воду на турбіну, передається генератору, який потім перетворює її на електричну енергію.
Керований турбіною, генератор виробляє змінний струм
Генератор підключено до валу приводу турбіни. Він має частину, що рухається - ротор і нерухому частину - статор. Зовнішня поверхня ротора вкрита електромагнітами. Внутрішня поверхня статора чи стінка циліндра складається з мідних обмоток. Коли ротор обертається всередині статора, електрони у мідних обмотках "вібрують". Їх рух генерує електричний струм, подібний до того, що створюється по електромагнітній індукції, але в набагато більшому масштабі.
Рис.5.9. Схема, що пояснює принцип отримання полюсоперемикання
називаються полюсоперемикання. Розроблено трифазні обмотки, які можна перемикати на різну кількість пар полюсів щодо: 2:1, 5:2, 7:3, 3:1 і т.д.
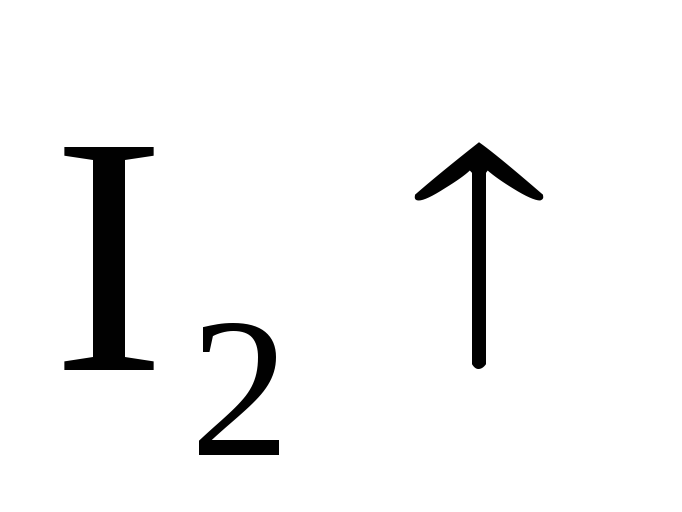
Принцип створення полюсоперемикає обмотки пояснимо на прикладі однофазної обмотки, укладеної у восьми пазах. Обмотка складається із двох напівобмоток. Якщо напівобмотки з'єднати послідовно, тобто перемичка буде між висновками До 1 і Н 2 (рис.5.9 а), то така обмотка буде створювати чотири пари полюсів (р=4). Число полюсів, створюваних обмоткою, можна знайти, задавшись напрямом струму в ній і застосувавши правило "буралки" для визначення напрямку силових ліній навколо пазів.
Турбіни мають постійну швидкість обертання
Монтаж турбіни Каплана. Усі генераторні установки в енергосистемі мають бути синхронізовані. Інакше кажучи, важливо, щоб вони підтримували точну швидкість обертання. Щоб забезпечити достатню якість електроенергії. Пристрій, який працює на електриці, призначений для використання змінного струму певної частоти. Ця частота залежить від швидкості обертання генераторного агрегату, тобто. кількість разів на секунду, коли роторні магніти проходять повз обмоток статора. Ця частота виражається в циклах на секунду, або герц, названий на честь німецького фізика Генріха Герца, який довів існування радіохвиль.
Якщо напівобмотки з'єднати зустрічно-послідовно, тобто. перемичка між висновками До 1 і К 2 (рис.9, б), така обмотка буде створювати дві пари полюсів (р = 2). При вибраному напрямку струму поле між пазами 2 і 3, 4 і 5, 6 і 7, 8 та 1 взаємно знищується.
Напівобмотки можна з'єднати зустрічно-паралельно, тобто. перемички між висновками H 1 і К 2 Н 2 і К 1 (рис.9, в), тоді обмотка буде також створювати дві пари полюсів (р=2).
У Північній Америці стандартний цикл змінного струму становить 60 разів на секунду, але у Європі він становить 50 разів на секунду. Це означає, що годинник, призначений для роботи на частоті 60 Гц, буде повільнішим при підключенні до європейської розетки. Для подачі змінного струму частотою 60 Гц вони повинні обертатися зі швидкістю 5 обертів на хвилину. Ось формула, яку використовували інженери.
Методи запуску двигунів
Майкл Фарадей, британський фізик та хімік, виявляє феномен індукції. Вчений першим створив електричний струм, рухаючи магніт туди і назад усередині металевої обмотки. Інноваційні принципи відкриття Фарадея швидко впроваджуються і застосовуються задоволення виробничих потреб індустріальної епохи. На основі цих принципів було створено перший електричний генератор, попередник сучасних енергоблоків. Фарадейські експерименти спровокували винахід іншими дослідниками першого електродвигуна та першого трансформатора.
Таким чином, існують два способи перемикання обмотки на менше пар полюсів щодо 2:1. Перший спосіб - перемикання з послідовного з'єднання напівобмоток на зустрічно-послідовне, другий - перемикання з послідовного з'єднання на зустрічно-паралельне. Розглянемо кожен спосіб стосовно трифазної обмотки двигуна.
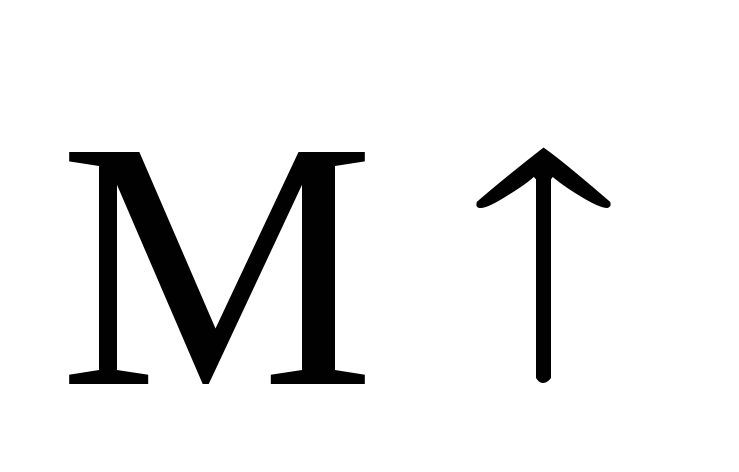
При першому способі перемикання обмотка, з'єднана зіркою, повинна мати 9 висновків на щитку (рис.5.10 а), а при з'єднанні трикутником - 12 висновків (рис.5.10 б). Після перемикання характер з'єднання обмоток не змінюється, т. е. зірка переключається на зірку, а трикутник - на трикутник.
Потужність двигуна при першому способі перемикання залишається постійною, отже, змінюються номінальний та максимальний моменти двигуна. Спільний розгляд механічних характеристик двигуна та різних механізмів (рис.5.10, в) показує, що такий спосіб перемикання найбільш доцільний для регулювання частоти обертання металорізальних верстатів.
У суднових електроприводах вантажопідйомних пристроїв, брашпилів, шпилів широкого поширення набули тришвидкісні асинхронні двигуни з трьома окремими обмотками на статорі різне число пар полюсів.
При другому способі перемикання обмотка, з'єднана зіркою, має лише 6 висновків (рис.5.11 а). Після перемикання утворюється з'єднання обмотки подвійна зірка. Потужність двигуна в цьому випадку подвоюється, а номінальний момент залишається незмінним.
Спільний розгляд механічних характеристик двигуна та різних механізмів (рис.5.11 б) показує, що другий спосіб перемикання доцільно застосовувати для регулювання частоти обертання вантажопідйомних пристроїв.
Якщо обмотка з'єднана трикутником, то після перемикання другого способу виходить з'єднання подвійна зірка. Потужність двигуна у своїй зростає на 15%.
Розглянуто найбільш прості способи перемикання обмоток, що дають два ступені швидкості. При складнішому перемиканні трифазної обмотки можна отримати три і навіть чотири ступені швидкості з самим. різним співвідношенням полюсів. Наприклад, вітчизняні двигуни серії МАП з однією трифазною обмоткою мають три швидкості (МАП-42/8-4-2, потужність 0,8/1, 8/2 кВт, частота обертання 700/1400/2800 об/хв) та чотири ( МАП-52/8-6-4-2, потужність 1,2/2,5/3/4 кВт, частота обертання 460/700/920/1440 об/хв). Більше чотирьох швидкостей практично не зустрічається, оскільки сильно ускладнюються обмотка та її перемикання. У двигуна МАП-52/8-6-4-2 на вивідний щиток зроблено 22 виводи.
У суднових електроприводах вантажопідйомних пристроїв, брашпилів, шпилів широкого поширення набули тришвидкісні асинхронні двигуни з трьома окремими обмотками на статорі різне число пар полюсів. Частота обертів
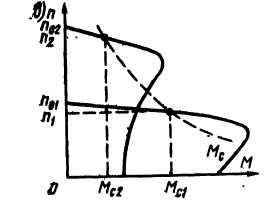
Рис.5.10. Перший спосіб перемикання трифазної обмотки, з'єднаної зіркою,
і трикутником, та відповідні механічні характеристики АТ.
регулюється включенням тієї чи іншої обмотки, але самі обмотки не перемикаються.
Вітчизняна промисловість випускає для суднових електроприводів багатошвидкісні асинхронні двигуни серії МАП, діапазон регулювання частоти обертання 6:1 або 7:1 Обмотка першої швидкості зазвичай має 26 або 28 полюсів.
Регулювання перемиканням пар полюсів відрізняється високою економічністю, оскільки ротор обертається при частоті, що встановилася, зі ковзанням в межах номінального і ніяких додаткових резисторів в ланцюг двигуна не включається. Серйозний недолік цього способу - ступінчастість та обмежена кількість швидкостей.
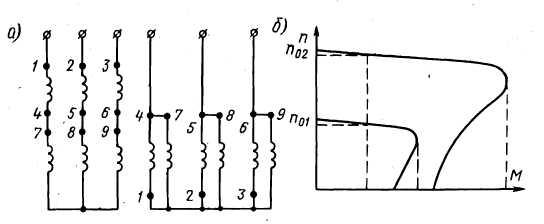
Рис.5.11. Другий спосіб перемикання трифазної обмотки, з'єднаної зіркою, і
відповідні механічні характеристики асинхронного двигуна
Регулювання частоти обертання зміною частоти струму мережі живлення (частотне регулювання).
Цей спосіб регулювання заснований на зміні синхронної частоти обертання n 0, яка пропорційна частоті струму в обмотці статора. Для здійснення такого регулювання необхідне джерело живлення з регульованою частотою струму. Як джерело застосовуються електромагнітні та напівпровідникові перетворювачі частоти. Однак необхідно мати на увазі, що одночасно зі зміною частоти напруги живленняf буде змінюватися максимальний електромагнітний момент двигуна. Тому для збереження перевантажувальної здатності, коефіцієнта потужності і ККД двигуна на необхідному рівні необхідно одночасно зі зміною частоти f змінювати і напругу мережі U. Якщо регулювання частоти обертання двигуна проводиться за умови сталості навантажувального моменту, то напруга, що підводиться, необхідно змінювати пропорційно зміні частоти струму, так, щоб їхнє ставлення залишалося величиною постійної:
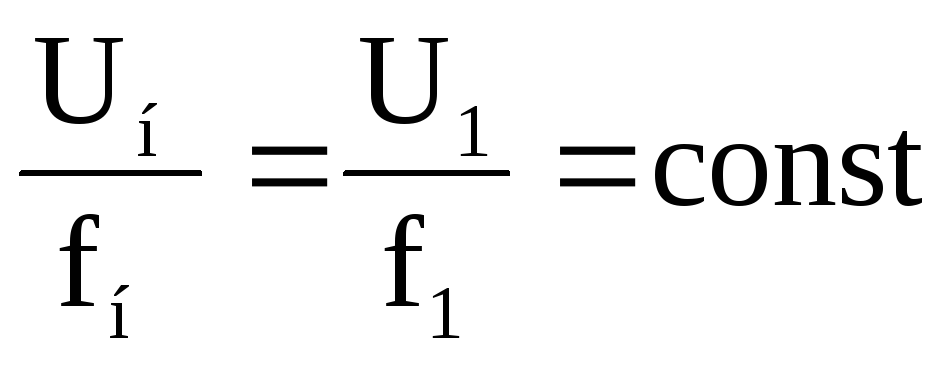
 ;
;
Частотне регулювання дозволяє плавно змінювати частоту обертання двигунів у широкому діапазоні (до 12:1).
Регулювання частоти обертання зміною частоти струму - це раціональний і економічний спосіб. Основні його переваги:
Використовується звичайний короткозамкнутий двигун;
Регулювання з погляду втрат у двигуні є економічним;
Досягаються великий діапазон та плавність регулювання;
Зберігається жорсткість механічних характеристик, отже і стабільність роботи приводу;
Рекуперативне гальмування може здійснюватись майже до повної зупинки.
Разом з тим відомо, що частота струму суднової електростанції підтримується постійною і регулювання частоти обертання двигуна потрібен окремий перетворювач частоти струму.
Сучасний частотно регульований електропривод складається з асинхронного або синхронного електричного двигуна та перетворювача частоти (рис.5.12).
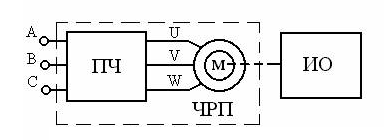
Рис.5.12 Частотно регульований електропривод
Перетворювач частоти управляє електричним двигуном і є електронним статичним пристроєм. На виході перетворювача формується електрична напруга зі змінними амплітудою та частотою. Назва «частотно регульований електропривод» обумовлена тим, що регулювання швидкості обертання двигуна здійснюється зміною частоти напруги живлення, що подається двигун від перетворювача частоти.
Протягом останніх років спостерігається широке та успішне впровадження частотно регульованого електроприводу на судах як для вирішення різних технологічних завдань, так і в системах електроруху. Це насамперед розробкою і створенням перетворювачів частоти на принципово нової елементної базі, головним чином біполярних транзисторах із ізольованим затвором IGBT.
У синхронному електричному двигуні частота обертання ротора в режимі дорівнює частоті обертання магнітного поля статора .
В асинхронному електричному двигуні частота обертання ротора в режимі відрізняється від частоти обертання на величину ковзання.
Частота обертання магнітного поля залежить від частоти напруги живлення. При живленні обмотки статора електричного двигуна трифазною напругою з частотою створюється магнітне поле, що обертається. Швидкість обертання цього поля визначається за відомою формулою
де - Число пар полюсів статора.
Перехід від швидкості обертання поля , що вимірюється в радіанах, до частоти обертання , вираженої в обертах за хвилину, здійснюється за такою формулою
де 60 - Коефіцієнт перерахунку розмірності.
Підставивши в це рівняння швидкість обертання поля, отримаємо, що
Таким чином, частота обертання ротора синхронного та асинхронного двигунів залежить від частоти напруги живлення.
На цій залежності і ґрунтується метод частотного регулювання.
Змінюючи за допомогою перетворювача частоту на вході двигуна ми регулюємо частоту обертання ротора.
У найбільш поширеному частотно регульованому приводі на основі асинхронних двигунів з короткозамкненим ротором застосовуються скалярне та векторне частотне керування.
При скалярному управлінніза певним законом змінюють амплітуду та частоту прикладеного до двигуна напруги. Зміна частоти напруги живлення призводить до відхилення від розрахункових значень максимального і пускового моментів двигуна, к.п.д., коефіцієнта потужності. Тому підтримки необхідних робочих характеристик двигуна необхідно зі зміною частоти одночасно відповідно змінювати і амплітуду напруги.
У існуючих перетворювачах частоти при скалярному управлінні найчастіше підтримується постійним відношення максимального моменту двигуна моменту опору на валу. Тобто при зміні частоти амплітуда напруги змінюється таким чином, що відношення максимального моменту двигуна до моменту навантаження залишається незмінним. Це відношення називається перевантажувальною здатністю двигуна.
За сталості перевантажувальної здатності номінальні коефіцієнт потужності та к.п.д. двигуна по всьому діапазоні регулювання частоти обертання практично не змінюються.
Максимальний момент, що розвивається двигуном, визначається наступною залежністю
де - Постійний коефіцієнт.
Тому залежність напруги живлення від частоти визначається характером навантаження на вал електричного двигуна.
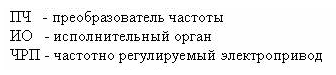
Для постійного моменту навантаження підтримується відношення U/f = const, і по суті забезпечується сталість максимального моменту двигуна. Характер залежності напруги живлення від частоти випадку з постійним моментом навантаження зображений на рис. 5.13(а). Кут нахилу прямої на графіку залежить від величин моменту опору і максимального моменту, що крутить, двигуна.
Разом з тим, на малих частотах, починаючи з деякого значення частоти, максимальний момент двигуна починає падати. Для компенсації цього і збільшення пускового моменту використовується підвищення рівня напруги живлення.
У разі вентиляторного навантаження реалізується залежність U/f2 = const. Характер залежності напруги живлення від частоти цього випадку показаний на рис.5.13 (б).
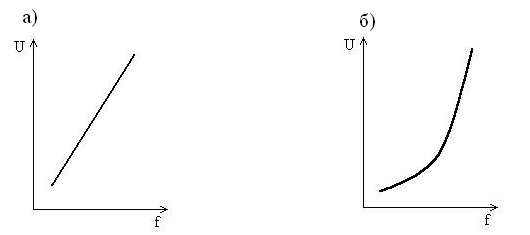
Рис.5.13 Характер залежності напруги живлення від частоти для випадку:
а) із постійним моментом навантаження
б) з вентиляторним моментом навантаження
При регулюванні в області малих частот максимальний момент також зменшується, але для цього навантаження це некритично.
Використовуючи залежність максимального моменту, що крутить, від напруги і частоти, можна побудувати графік U від f для будь-якого типу навантаження.
Важливою перевагою скалярного методу є можливість одночасного керування групою електродвигунів.
Скалярне керування достатньо для більшості практичних випадків застосування частотно регульованого електроприводу з діапазоном регулювання частоти обертання двигуна до 1:40.
Векторне керуваннядозволяє суттєво збільшити діапазон керування, точність регулювання, підвищити швидкодію електроприводу. Цей метод забезпечує безпосереднє керування крутним моментом двигуна.
Обертальний момент визначається струмом статора, який створює збуджуюче магнітне поле. При безпосередньому керуванні моментом необхідно змінювати окрім амплітуди та фазу статорного струму, тобто вектор струму. Цим і зумовлений термін "векторне управління".
Для управління вектором струму, а, отже, положенням магнітного потоку статора відносно ротора, що обертається потрібно знати точне положення ротора в будь-який момент часу. Завдання вирішується або за допомогою виносного датчика положення ротора, або визначення положення ротора шляхом обчислень за іншими параметрами двигуна. Як ці параметри використовуються струми та напруги статорних обмоток.
Менш дорогим є частотно регульований електропривод з векторним керуванням без датчика зворотного зв'язку швидкості, проте векторне керування при цьому вимагає великого об'єму та високої швидкості обчислень від перетворювача частоти.
Крім того, для безпосереднього управління моментом при малих, близьких до нульових швидкостей обертання робота частотно регульованого електроприводу без зворотного зв'язку за швидкістю неможлива.
Векторне управління з датчиком зворотного зв'язку швидкості забезпечує діапазон регулювання до 1:1000 і вище, точність регулювання швидкості – соті частки відсотка, точність моменту – одиниці відсотків.
Перетворювач частоти – це пристрій, призначений для перетворення змінного струму (напруги) однієї частоти змінний струм (напруга) іншої частоти.
Вихідна частота в сучасних перетворювачах може змінюватися в широкому діапазоні і бути як вище, так і нижче частоти мережі живлення.
Схема будь-якого перетворювача частоти складається з силової та керуючої частин. Силова частина перетворювачів зазвичай виконана на тиристорах чи транзисторах, які працюють у режимі електронних ключів. Керівна частина виконується на цифрових мікропроцесорах та забезпечує управління силовими електронними ключами, а також вирішення великої кількості допоміжних завдань (контроль, діагностика, захист).
Перетворювачі частоти, що застосовуються в регульованому електроприводі, залежно від структури та принципу роботи силової частини поділяються на два класи:
1. Перетворювачі частоти з явно вираженою проміжною ланкою постійного струму.
2. Перетворювачі частоти з безпосереднім зв'язком (без проміжної ланки постійного струму).
Кожен із існуючих класів перетворювачів має свої переваги та недоліки, які визначають область раціонального застосування кожного з них.
У перетворювачів з безпосереднім зв'язком (рис. 5.14) силова частина являє собою керований випрямляч і виконана на тиристорах, що не замикаються. Система управління по черзі відмикає групи тиристотрів і підключає статорні обмотки двигуна до мережі живлення.
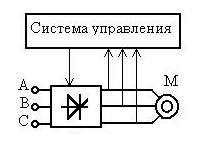
Рис. 5.14 Перетворювач частоти із безпосереднім зв'язком
Таким чином, вихідна напруга перетворювача формується з "вирізаних" ділянок синусоїд вхідної напруги. На рис.5.15 показаний приклад формування вихідної напруги однієї з фаз навантаження.
Рис.5.15 Формування вихідної напруги для однієї з фаз навантаження
На вході перетворювача діє трифазна синусоїдальна напруга u а, u в, u с. Вихідна напруга u вих має несинусоїдальну «пилкоподібну» форму, яку умовно можна апроксимувати синусоїдою (потовщена лінія). З малюнка видно, що частота вихідної напруги не може дорівнювати або вище частоти мережі живлення. Вона знаходиться у діапазоні від 0 до 30 Гц. Як наслідок, малий діапазон управління частоти обертання двигуна (не більше 1: 10). Це обмеження не дозволяє застосовувати такі перетворювачі в сучасних частотно регульованих приводах із широким діапазоном регулювання технологічних параметрів.
Використання тиристорів, що не замикаються, вимагає відносно складних систем управління, які збільшують вартість перетворювача.
"Різана" синусоїда на виході перетворювача є джерелом вищих гармонік, які викликають додаткові втрати в електричному двигуні, перегрів електричної машини, зниження моменту, дуже сильні перешкоди в мережі живлення. Застосування компенсуючих пристроїв призводить до підвищення вартості, маси, габаритів, зниження к.п.д. системи загалом.
Поряд із перерахованими недоліками перетворювачів з безпосереднім зв'язком, вони мають певні переваги. До них відносяться:
Практично найвищий ККД щодо інших перетворювачів (98,5% і вище),
Здатність працювати з великими напругами і струмами, що уможливлює їх використання в потужних високовольтних приводах,
Відносна дешевизна, незважаючи на збільшення абсолютної вартості за рахунок схем керування та додаткового обладнання.
Подібні схеми перетворювачів використовуються в старих приводах і нові конструкції практично не розробляються.
Найбільш широке застосування в сучасних частотно регульованих приводах знаходять перетворювачі з явно вираженою ланкою постійного струму (рис. 5.16).
У перетворювачах цього класу використовується подвійне перетворення електричної енергії: вхідна синусоїдальна напруга з постійною амплітудою і частотою випрямляється у випрямлячі (В), фільтрується фільтром (Ф), згладжується, а потім знову перетворюється інвертором (І) змінну напругу змінної частоти і. Подвійне перетворення енергії призводить до зниження к.п.д. та до деякого погіршення масогабаритних показників по відношенню до перетворювачів із безпосереднім зв'язком.
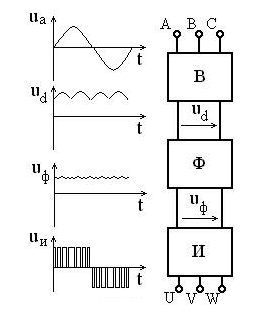
Рис 5.16 Перетворювач частоти зі ланкою постійного струму
Для формування синусоїдальної змінної напруги використовуються автономні інвертори напруги та автономні інвертори струму.
Як електронні ключі в інверторах застосовуються тиристори GTO, що замикаються, і їх удосконалені модифікації GCT, IGCT, SGCT, і біполярні транзистори з ізольованим затвором IGBT.
Головною перевагою тиристорних перетворювачів частоти, як і в схемі з безпосереднім зв'язком, є здатність працювати з великими струмами та напругами, витримуючи при цьому тривале навантаження та імпульсні дії.
Вони мають вищий ККД (до 98%) по відношенню до перетворювачів на IGBT транзисторах (95 – 98%).
Перетворювачі частоти на тиристорах в даний час займають домінуюче положення у високовольтному приводі в діапазоні потужностей від сотень кіловат і до десятків мегават з вихідною напругою 3 - 10 кВ і вище. Однак їх ціна на один кВт вихідної потужності найбільша у класі високовольтних перетворювачів.
До недавнього минулого перетворювачі частоти на GTO становили основну частку і в низьковольтному частотно регульованому приводі. Але з появою IGBT транзисторів стався «природний відбір» і сьогодні перетворювачі на їх базі загальновизнані лідери в області частотно-регульованого приводу.
Тиристор є напівкерованим приладам: для його включення достатньо подати короткий імпульс на висновок, що управляє, але для вимикання необхідно або прикласти до нього зворотну напругу, або знизити комутований струм до нуля. Для цього в тиристорному перетворювачі частоти потрібна складна та громіздка система керування.
Біполярні транзистори з ізольованим затвором IGBT відрізняють від тиристорів повна керованість, проста неенергоємна система управління, найвища робоча частота
Внаслідок цього перетворювачі частоти на IGBT дозволяють розширити діапазон керування швидкості обертання двигуна, підвищити швидкість приводу в цілому.
Для асинхронного електроприводу з векторним керуванням перетворювачі на IGBT дозволяють працювати на низьких швидкостях без датчика зворотного зв'язку.
Застосування IGBT з більш високою частотою перемикання разом із мікропроцесорною системою управління в перетворювачах частоти знижує рівень вищих гармонік, характерних для тиристорних перетворювачів. Як наслідок менші додаткові втрати в обмотках та магнітопроводі електродвигуна, зменшення нагріву електричної машини, зниження пульсацій моменту та виключення так званого крокування ротора в області малих частот. Знижуються втрати у трансформаторах, конденсаторних батареях, збільшується їх термін служби та ізоляції проводів, зменшуються кількість помилкових спрацьовувань пристроїв захисту та похибки індукційних вимірювальних приладів.
Перетворювачі на транзисторах IGBT у порівнянні з тиристорними перетворювачами при однаковій вихідній потужності відрізняються меншими габаритами, масою, підвищеною надійністю через модульне виконання електронних ключів, кращого тепловідведення з поверхні модуля і меншої кількості конструктивних елементів.
Вони дозволяють реалізувати більш повний захист від кидків струму та від перенапруги, що суттєво знижує ймовірність відмов та пошкоджень електроприводу.
На даний момент низьковольтні перетворювачі на IGBT мають більш високу ціну на одиницю вихідної потужності через відносну складність виробництва транзисторних модулів. Однак за співвідношенням ціна/якість, виходячи з перерахованих переваг, вони явно виграють у тиристорних перетворювачів, крім того протягом останніх років спостерігається неухильне зниження цін на IGBT модулі.
Головною перешкодою на шляху їх використання у високовольтному приводі з прямим перетворенням частоти та при потужностях вище 1 – 2 МВт зараз є технологічні обмеження. Збільшення напруги, що комутується, і робочого струму призводить до збільшення розмірів транзисторного модуля, а також вимагає більш ефективного відведення тепла від кремнієвого кристала.
Нові технології виробництва біполярних транзисторів спрямовані на подолання цих обмежень, і перспективність застосування IGBT дуже висока також високовольтному приводі. В даний час транзистори IGBT застосовуються у високовольтних перетворювачах у вигляді послідовно з'єднаних декількох одиничних модулів.
Типова схема низьковольтного перетворювача частоти IGBT представлена на рис. 5.17 У нижній частині малюнка зображені графіки напруги та струмів на виході кожного елемента перетворювача.
Змінна напруга мережі живлення (u вх.) з постійною амплітудою і частотою (U вх = const, f вх = const) надходить на керований або некерований випрямляч (1).
Для згладжування пульсацій випрямленої напруги (u випр.) Використовується фільтр (2). Випрямляч та ємнісний фільтр (2) утворюють ланку постійного струму.
З виходу фільтра постійна напруга u d надходить на автономний вхідний імпульсного інвертора (3).
Автономний інвертор сучасних низьковольтних перетворювачів, як було зазначено, виконується на основі біполярних силових транзисторів з ізольованим затвором IGBT. На аналізованому малюнку зображено схему перетворювача частоти з автономним інвертором напруги як набула найбільшого поширення.
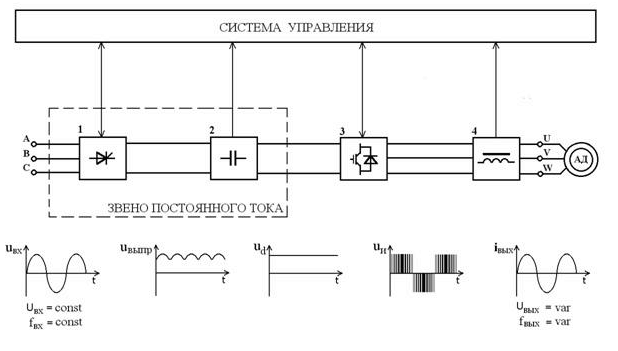
Рис. 5.17 Типова схема перетворювача частоти на транзисторах IGBT
В інверторі здійснюється перетворення постійної напруги u d в трифазна (або однофазна) імпульсна напруга u і змінної амплітуди і частоти. За сигналами системи управління кожна обмотка електричного двигуна приєднується через відповідні силові транзистори інвертора до позитивного та негативного полюсів ланки постійного струму. Тривалість підключення кожної обмотки в межах періоду проходження імпульсів модулюється за синусоїдальним законом. Найбільша ширина імпульсів забезпечується в середині напівперіоду, а до початку та кінця напівперіоду зменшується. Таким чином, система управління забезпечує широтно-імпульсну модуляцію (ШІМ) напруги, що прикладається до обмоток двигуна. Амплітуда та частота напруги визначаються параметрами модулюючої синусоїдальної функції.
При високій несучій частоті ШІМ (2...15 кГц) обмотки двигуна внаслідок їх високої індуктивності працюють як фільтр. Тому в них протікають практично синусоїдальні струми.
У схемах перетворювачів з керованим випрямлячем (1) зміна амплітуди напруги uі може досягатися регулюванням величини постійної напруги u d, а зміна частоти – режимом роботи інвертора.
При необхідності на виході автономного інвертора встановлюється фільтр для згладжування пульсацій струму. (У схемах перетворювачів на IGBT через низький рівень вищих гармонік у вихідній напрузі потреба у фільтрі практично відсутня.)
Таким чином, на виході перетворювача частоти формується трифазна (або однофазна) змінна напруга змінної частоти і амплітуди (U вих = var, f вих = var).
Найчастіше доводиться знижувати швидкість обертання двигуна, виконує певні завдання механізмі. Зменшення числа оборотів електродвигуна можна досягти за допомогою керуючих схем стандартного виготовлення.
Електродвигуни змінного струму часто використовують у діяльності людини, на металообробних верстатах, транспорту, кранових механізмів та іншого устаткування. Двигуни перетворюють енергію змінного струму живлення на обертання валу та агрегатів. Використовуються переважно асинхронні двигуни змінного струму.
Ротор, а також статор двигуна складаються з котушок дроту, покладеного в сердечник, виготовлений зі спеціальної сталі. Класифікація електродвигунів походить від способу закладки обмотки.
Обмотка з латунних і мідних стрижнів вставляється в осердя, по краях встановлюються кільця. Така котушка дроту називається короткозамкненим (КР) ротором. Електродвигуни невеликої потужності мають стрижні, а також диски, які були відлиті разом. Для електродвигунів із потужним моментом деталі відливаються окремо, потім зварюються. Обмотка статора може бути підключена двома способами: трикутником, зіркою.
Фазний ротор складається з 3-фазної роторної обмотки, підключеної контактними кільцями та щітками до живлення. Обмотка з'єднана "зіркою".

Розрахунок кількості обертів асинхронного двигуна
Поширеним двигуном на верстатах та підйомних пристроях є двигун із короткозамкненим ротором, тому приклад для розрахунку слід брати для нього. Мережева напруга надходить на обмотку статора. Обмотки зміщені одна від одної на 120 градусів. Постало електромагнітної індукції збуджує електричний струм в обмотці. Ротор починає працювати під впливом ЕМС.
Основною характеристикою роботи двигуна є кількість обертів за хвилину. Розраховуємо це значення:
n = 60 f/p, обор/хв;
де f – частота мережі, герц, р – кількість полюсів статора (у парах).
На корпусі електродвигуна є табличка з технічними даними. Якщо її немає, то можна самому розрахувати кількість оборотів валу обладнання за іншими наявними даними. Розрахунок провадиться трьома способами.
- Розрахунок числа котушок, яке порівнюється з нормами для різної напруги, слідує за таблицею:

- Розрахунок швидкості роботи за кроком діаметра обмотки за формулою:
2 p = Z 1 / y, де 2р – кількість полюсів, Z 1 – число пазів у статорі, у – крок обмотки.
Вибираємо з таблиці відповідні обороти двигуна:

- Обчислюємо кількість полюсів за параметрами сердечника за формулою:
2p = 0,35 Z 1 b / h або 2 p = 0,5 D i / h,
де 2р – кількість полюсів, Z 1 – число пазів, b – розмір зуба, см, h – висота спинки, см, D i – діаметр зубців, див.
За результатами розрахунку та індукції слідує число витків обмотки, порівнюється зі значеннями мотора за паспортом.
Як змінити швидкість роботи двигуна?
Змінювати швидкість крутного моменту механізму обладнання можна різними способами, наприклад, механічними редукторами з перемиканням передач, муфтами та іншими пристроями. Але це не завжди можливе. Практично використовується 7 способів корекції частоти обертання приводів, що регулюються. Усі способи поділені на два основні напрямки.
- Корекція магнітного поля шляхом впливу на частоту струму, зменшення чи збільшення числа пар полюсів, корекція напруги. Напрямок характерний для моторів з короткозамкненим (КР) ротором.
- Ковзання коригується напругою живлення, додаванням ще одного резистора в ланцюг схеми ротора, установкою подвійного живлення, використанням каскаду вентилів. Такий напрямок використовується для роторів із фазами.
- Частотники бувають із двома видами управління: скалярне, векторне. При скалярному управлінні прилад діє при певних значеннях вихідної різниці потенціалів та частотою, працюють у примітивних домашніх приладах, наприклад, вентиляторах. При векторному управлінні сила струму встановлюється досить точно.
- При виборі пристрою параметри потужності грають визначальну роль. Розмір потужності розширює сферу використання, полегшує обслуговування.
- При виборі пристрою враховується інтервал робочої напруги мережі, що знижує небезпеку виходу його з ладу через різкі перепади різниці потенціалів. При надмірному підвищенні напруги конденсатори мережі можуть вибухнути.
- Частота – важливий чинник. Його величина визначається вимогами виробництва. Найменше значення свідчить про можливість використання швидкості оптимальному режимі роботи. Для більшого інтервалу частоти застосовують частотники з векторним управлінням. Насправді часто використовуються інвертори з інтервалом частот від 10 до 10 Гц.
- Частотний перетворювач, що має багато різних виходів і входів, зручний у користуванні, але вартість його вища, налаштування складніше. Рознімання частотників бувають трьох типів: аналогові, дискретні, цифрові. Зв'язок зворотного виду вступних команд проводиться через аналогові роз'єми. Цифрові клеми вводять сигнали від датчиків цифрового типу.
- Вибираючи модель частотного перетворювача, необхідно оцінити керуючої шині. Її характеристика підбирається під схему інвертора, що зумовлює кількість колодок. Найкращим вибором працює частотник із запасом кількості роз'ємів для подальшої модернізації приладу.
- Частотники, що витримують великі навантаження (на 15% вище потужності двигуна), при виборі мають переваги. Щоб не помилитися при покупці частоти перетворювача, ознайомтеся з інструкцією. У ньому є основні параметри експлуатації устаткування. Якщо потрібен прилад для максимальних навантажень, необхідно вибирати частотник, що зберігає струм на піку роботи вище, ніж на 10% від номіналу.
Як підключити частотний перетворювач
Якщо кабель для підключення на 220 В з 1 фазою, застосовується схема «трикутника». Не можна підключати частотник, якщо вихідний струм вище 50% від номінального значення.
Якщо кабель живлення три фази 380 У, робиться схема «зірки». Щоб простіше було підключати живлення, передбачені контакти та клеми з літерними позначеннями.
- Контакти R, S, T призначені підключення мережі живлення по фазам.
- Клеми U, V, W служать з'єднанням електродвигуна. Для реверсу достатньо змінити підключення двох дротів між собою.
У приладі має бути колодка з клемою підключення до землі. Детальніше, як підключити, .
Як обслуговувати частотні перетворювачі?
Для довгострокової експлуатації інвертора потрібен контроль за його станом та виконання приписів:
- Очищати від пилу внутрішні елементи. Можна використовувати компресор для видалення пилу стисненим повітрям. Пилосос для цього не підходить.
- Періодично контролювати стан вузлів, проводити заміну. Термін служби електролітичних конденсаторів становить п'ять років, запобіжних вставок десять років. Вентилятори, що охолоджують, працюють до заміни 3 роки. Шлейфи дротів використовуються шість років.
- Контроль напруги шини постійного струму та температура механізмів є необхідним заходом. При підвищеній температурі термопровідна паста засихає та виводить із ладу конденсатори. Кожні 3 роки на силові клеми наносять шар струмопровідної пасти.
- Умови та режим роботи необхідно дотримуватися у суворій відповідності. Температура довкілля має перевищувати 40 градусів. Пил та вологість негативно впливають на стан робочих елементів приладу.
Окупність перетворювача частоти
Електроенергія постійно дорожчає, керівники організацій змушені заощаджувати різними шляхами. У разі промислового виробництва більшість енергії витрачається механізмами, мають електродвигуни.
Виробники пристроїв для електротехнічних машин та агрегатів пропонують спеціальні пристрої та прилади для керування електромоторами. Такі пристрої заощаджують енергію електричного струму. Вони називаються інверторами чи частотними перетворювачами.
Фінансові витрати на купівлю частотника не завжди виправдовують економію коштів, оскільки вартість їх можна порівняти з вартістю . Не завжди привод механізму можна швидко оснастити інвертором. Які складнощі при цьому виникають? Розберемо методи запуску асинхронних двигунів для розуміння переваг інверторів.
Методи запуску двигунів
Можна визначити 4 методи запуску двигунів.
- Пряме включення для моторів до 10 кВт. Спосіб неефективний для прискорення, збільшення моменту, навантажень. Струм вище номіналу в 7 разів.
- Включення з можливістю вибору схем «трикутника» та «зірки».
- Інтегрування пристрою плавного запуску.
- Застосування інвертора. Спосіб особливо ефективний для захисту двигуна, прискорення, моменту, економії енергії.
Економічне обґрунтування ефекту від інвертора
Час окупності інвертора розраховується відношенням витрат на придбання економії енергії. Економія зазвичай дорівнює від 20 до 40% від номінальної потужності двигуна.
Витрати знижують фактори, що підвищують продуктивність частотних перетворювачів:
- Зменшення витрат за обслуговування.
- Підвищення ресурсу двигуна.
Економія розраховується:
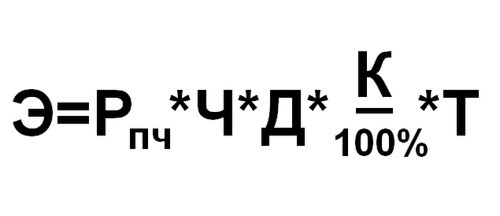
де Е - економія грошей у рублях;
Р пч – потужність інвертора;
Ч - годин експлуатації на день;
Д – число днів;
К – коефіцієнт очікуваного відсотка економії;
Т – тариф енергії у рублях.
Час окупності дорівнює відношенню витрат за купівлю інвертора до економії грошей. Розрахунки показують, що період окупності виходить від трьох місяців до трьох років. Це залежить від потужності двигуна.