Момент, що розвивається двигуном дорівнює електромагнітної потужності, поділеної на синхронну швидкість обертання електроприводу.
M = P ем /ω 0
Електромагнітна потужність - це потужність, що передається через повітряний зазор від статора до ротора, і вона дорівнює втрат у роторі, які визначаються за формулою:
P ем = m I 2 2 (r 2 '/s)
m – число фаз.
M = M ем = (Pm/ω 0) (I 2 ') 2 (r 2 '/s)
Електромеханічною характеристикою асинхронного двигунає залежність I2' від ковзання. Але так як асинхронна машина працює тільки як електродвигун, основною характеристикою є механічна характеристика.
M = Me м = (Pm/ω 0) (I 2 ') 2 (r 2 '/s) – спрощене вираження механічної характеристики.
Підставивши в цей вираз значення струму, отримаємо: M = / [ω 0 [(r 1 + r 2 '/s) 2 + (x 1 + x 2 ') 2 ]]
Замість ω 0 потрібно підставити механічну швидкість, у результаті кількість пар полюсів скорочується.
M = / [ω 0 [(r 1 + r 2 '/s) 2 + (x 1 + x 2 ') 2 ]] – це рівняння механічної характеристикиасинхронний двигун.
При переході асинхронного двигуна в генераторний режим швидкість обертання ω > ω 0 і ковзання стає негативним (s Коли ковзання змінюється від 0 до +∞, режим називається «режимом електромагнітного гальма».
Задаючись значеннями ковзання від до +∞, отримаємо характеристику:
Повна механічна характеристика асинхронного двигуна
Як видно з механічної характеристики, вона має два екстремуми: один на відрізку зміни ковзання на ділянці від 0 до +∞, інший на відрізку від 0 до -∞. dM/ds=0
M max = /] + відноситься до рухового режиму. - відноситься до генераторного режиму.
M max = M кр M кр – критичний момент.
Ковзання, при якому момент досягає максимуму, називається критичним ковзанням, і воно визначається за формулою: s кр = ±
Критичне ковзання має однакове значення і в руховому та в генераторному режимах.
Величину M кр можна отримати, підставивши формулу моменту значення критичного ковзання.
Момент при ковзанні 1 називається пусковим моментом. Вираз для пускового моменту можна отримати, підставивши 1 формулу:
M п = / [ω 0 [(r 1 + r 2 ') 2 + (x 1 + x 2 ') 2 ]]
Оскільки знаменник у формулі моменту максимального на кілька порядків більший за U ф, прийнято вважати M кр ≡U ф 2 .
Критичне ковзання залежить від величини активного опору обмотки ротора R 2 '. Момент пусковий, як видно з формули, залежить від активного опоруротора r 2 '. ця властивість пускового моменту використовується в асинхронних двигунах з фазним ротором, у яких пусковий момент збільшують шляхом введення активного опору ланцюг ротора.
7.Холостий хід трансформатора
Режимом холостого ходутрансформатора називають режим роботи при живленні однієї з обмоток трансформатора від джерела зі змінною напругою та при розімкнутих ланцюгах інших обмоток. Такий режим роботи може бути у реального трансформатора, коли він підключений до мережі, а навантаження, що живиться від його вторинної обмотки, ще не включена. По первинній обмотці трансформатора проходить струм I 0 , в той же час вторинній обмотціструму немає, оскільки ланцюг її розімкнуто. Струм I 0 , проходячи по первинній обмотці, створює в магнітопроводі синусоїдально змінний лоток Ф 0 , який через магнітні втрати відстає по фазі від струму на кут втрат δ. 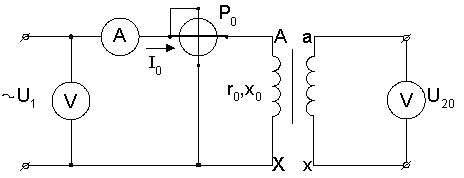
![]()
Графічно виражена залежність електромагнітного моменту від ковзання називається механічною характеристикоюасинхронного двигуна (рис. 3.3).
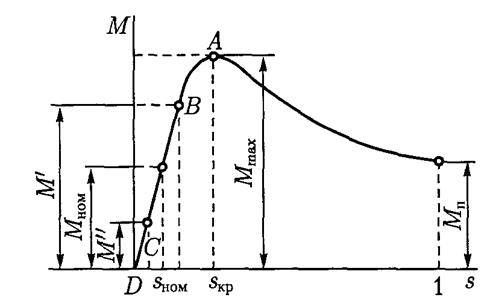
Рис. 3.3. Механічна характеристика асинхронного двигуна
Спрощена формула для розрахунку електромагнітного моменту асинхронного двигуна (формула Клосса) може бути використана для побудови механічної характеристики

При цьому критичне ковзання визначають за формулою
![]()
де м = М max /М ном - перевантажувальна здатність двигуна.
При розрахунку механічної характеристики слід пам'ятати, що з значеннях ковзання, перевищують критичне, точність розрахунків різко знижується. Це пояснюється зміною параметрів схеми заміщення асинхронного двигуна, викликаного магнітним насиченням зубців статора і ротора, збільшенням частоти струму в обмотці ротора.
Форма механічних характеристик асинхронного двигуна значною мірою залежить від величин підведеного до обмотки статора напруги U 1 (рис. 3.4) та активного опору обмотки ротора r 2 (рис. 3.5).

Рис. 3.4. Вплив напруги U 1 на механічні характеристики асинхронного двигуна
Приведені в каталогах на асинхронні двигуни дані зазвичай містять відомостей про параметри схеми заміщення, що утрудняє застосування формул для розрахунку електромагнітного моменту. Тому для розрахунку електромагнітного моменту часто застосовують формулу

Рис. 3.5. Вплив опору r" 2 на механічні характеристики асинхронного двигуна
Експлуатаційні властивості асинхронного двигуна визначаються його робочими характеристиками: залежність частоти обертання n 2 ,моментом на валу М 2 ,ККД та коефіцієнтом потужності cosφ 1 від корисного навантаження двигуна Р 2 .
При розрахунку параметрів визначення робочих характеристик асинхронних двигунів використовують або графічний метод, основу якого побудова кругової діаграми, або аналітичний метод.
Підставою для виконання будь-якого з методів розрахунку робочих характеристик є результати дослідів холостого ходу і короткого замикання. Якщо ж двигун проектується, ці дані отримують у його розрахунку.
При розрахунку опорів резисторів rдоб, що застосовуються в ланцюгах статора або фазного ротора для обмеження пускового струмуабо регулювання частоти обертання, використовують принцип: для даного конкретного асинхронного двигуна ковзання sпропорційно до активного опору ланцюга ротора цього двигуна. Відповідно до цього справедлива рівність
(r 2 + rдоб) /s= r 2 /sном,
де r 2- Активний опір власне обмотки ротора при робочій температурі; s -ковзання при введеному в ланцюг ротора резистора опором rдоб.
З цього виразу отримаємо формулу для розрахунку активного опору додаткового резистора г до6 необхідного для отримання заданого підвищеного ковзання sпри заданому (номінальному) навантаженні:
rдоб = r 2 (s/s ном – 1).
Існує два методи розрахунку пускових реостатів: графічний та аналітичний.
Графічний методточніший, але вимагає побудови природної механічної характеристики та пускової діаграми двигуна, що пов'язано з виконанням великого обсягу графічних робіт.
Аналітичний методрозрахунку пускових реостатів простіший, але менш точний. Це зумовлено тим, що в основі методу лежить припущення прямолінійності робочої ділянки природної механічної характеристики асинхронного двигуна. Але при ковзанні близькому до критичного це припущення викликає помітну помилку, яка тим значніша, чим ближче початковий пусковий момент. М 1 до максимального моменту М m ах. Тому аналітичний метод розрахунку застосуємо лише за значення початкового пускового моменту М 1 < 0,7 · М m ах .
Опір резисторів на щаблях пускового реостату:
третьою rдоб3 = r 2 (λ м - 1);
другий rдоб2 = rдоб3 λ м;
першою rдоб1 = rдоб2 λ м,
де r 2 - активний опір фазної обмотки ротора асинхронного двигуна
де Е 2 та I 2ном - дані каталогу на обраний типорозмір двигуна.
Опір пускового реостату на його щаблях:
першою R ПР1 = rдоб1 + rдоб2 + rдоб3;
другий R ПР2 = rдоб2 + rдоб3
третій R ПР2 = rдоб3.
Для обмеження пускового струму асинхронних двигунів короткозамкненим роторомзастосовують спеціальні схеми їхнього включення з елементами, що обмежують пусковий струм. Всі ці методи засновані на зниженні статора напруги, що підводиться до обмотки. Найбільше застосування отримали схеми з включенням до лінійних дротів статора резисторів або дроселів (див. рис. 3.14, б).Розрахунок необхідного опору цих елементів при заданому зниженні пускового струму а щодо його природного значення ведеться за формулами:
для резисторів з активним опором
Rп = 
для дроселів
х L = 
Повний опір двигуна в режимі короткого замикання Z до,Ом,
Z k =U 1 /I п
Тут хдо і r k - індуктивна та активна складові цього опору
R k = Z k cosφ k; x k =
Зменшення штучного пускового моменту при включенні R або L складе
α м = α 2 i
Таблиця 3.1
Таким чином, якщо встановлено значення α м, що визначає величину штучного пускового моменту М" п, то для розрахунку відповідних значень R п або x Lможна скористатися наведеними вище формулами, підставивши в них замість α2 i, величину м.
Електричний опіробмоток двигунів, які наведені в каталогах, зазвичай відповідають температурі +20 °С. Але при розрахунках параметрів і властивостей двигунів опору їх обмоток потрібно приводити до робочої температури. Відповідно до чинного стандарту величина робочої температури приймається залежно від класу нагрівальностійкості електричної ізоляції, застосованої у двигуні: при класі нагрівальностійкості робоча температура дорівнює 75 °С, а при класах нагрівальностійкості F і Н - 115 °С. Перерахунок опорів обмоток на робочу температуру виконується шляхом множення опору обмотки при температурі 20 °С, коефіцієнт нагрівання k t:
r= r 20 к t.
Значення цього коефіцієнта приймають залежно від призначення двигунів та його габаритів (висоти осі обертання) (табл. 3.1).
СИНХРОНІ МАШИНИ
ОСНОВНІ ПОНЯТТЯ
Характерною ознакою синхронних машинє жорсткий зв'язок між частотою обертання ротора n 1 та частотою змінного струмув обмотці статора f 1:
n 1 = f 1 · 60/ р.
Іншими словами, магнітне поле статора, що обертається, і ротор синхронної машини обертаються синхронно,тобто з однаковою частотою.
За своєю конструкцією синхронні машини поділяються на явнополюсні та неявнополюсні. У явнополюсних синхронних машинах ротор має явно виражені полюси, на яких мають котушки обмотки збудження, що живляться. постійним струмом. Характерною ознакою таких машин є відмінність магнітного опору по поздовжній осі (по осі полюсів) і поперечної осі (по осі, що проходить в міжполюсному просторі). Магнітний опір потоку статора по поздовжній осі ddнабагато менше магнітного опору потоку статора по поперечній осі qq.У синхронних неявнополюсних машинах магнітні опори по поздовжній і поперечній осях однакові, оскільки повітряний зазор у цих машин по периметру статора однаковий.
Конструкція статора синхронної машини, в принципі, не відрізняється від статора асинхронної машини. В обмотці статора в процесі роботи машини індукуються ЕРС та протікають струми, які створюють магніторушійну силу (МДС), максимальне значення якої
F 1 =0,45m 1 I 1 w 1 k об1 / р
Ця МДС створює магнітне поле, що обертається, а в повітряному зазорі δ машини створюється магнітна індукція, графік розподілу якої у межах кожного полюсного поділу т залежить від конструкції ротора (рис. 4.1).
Для явнополюсної синхронної машини справедливе рівняння напруги:
Ú 1 =Ė 0 + Ė 1 d + Ė 1 q + Ė σ1 – İ 1 r 1
де Ė 0 - основна ЕРС синхронної машини, пропорційна основному магнітному потоку синхронної машини Ф 0 ; Ė 1 d - ЕРС реакції якоря синхронної машини по поздовжній осі, пропорційна МДС реакції якоря по поздовжній осі F 1 d; Ė σ1 - ЕРС реакції якоря по поперечній осі, пропорційна МДС реакції якоря по поперечній осі F 1 q; Ė σ1 - ЕРС розсіювання, обумовлена наявністю магнітного потоку розсіювання Ф 0 величина цієї ЕРС пропорційна індуктивному опору розсіювання обмотки статора х 1
Ė σ1 = jİ 1 r
İ 1 r 1 - активне падіння напруги у фазній обмотці статора, зазвичай цією величиною при вирішенні завдань нехтують через її невелике значення.
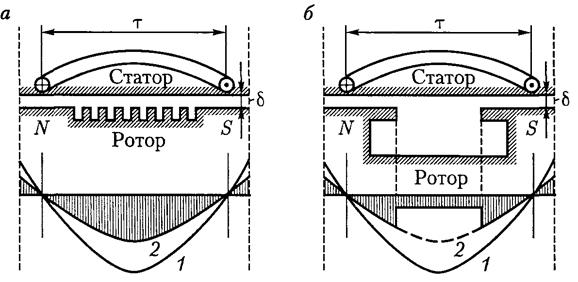
Рис. 4.1. Графіки розподілу магнітної індукції по поперечній осі
неявно полюсний ( а) і явно полюсної ( б) синхронних машин:
1 - графік МДС; 2 - графік магнітної індукції
Для неявно полюсної синхронної машини рівняння напруги має вигляд
Ú 1 =Ė 0 + Ė c – İ 1 r 1
Тут
Ė c = Ė 1 + Ė σ1
де Ė 1 - ЕРС реакції якоря неявно полюсної синхронної машини. Розглянутим рівнянням напруги відповідають векторні діаграми напруги. Ці діаграми доводиться будувати визначення чи основний ЕРС машини Е 0 ,або напруги статора обмотки U 1 .Слід мати на увазі, що рівняння напруги та відповідні їм векторні діаграмине враховують магнітного насичення магнітопроводу синхронної машини, яке, як відомо, впливає на величину індуктивних опорів, викликаючи їхнє зменшення. Облік цього насичення є складним завданням, тому при розрахунках ЕРС і напруг синхронних машин зазвичай користуються практичною діаграмоюЕРС, яка враховує стан насичення магнітної системи, спричинений дією реакції якоря при навантаженні синхронної машини. При побудові практичної діаграми ЕРС намагнічує силу реакції якоря не розкладають на поздовжню та поперечну складові, тому ця діаграма може бути застосована як при розрахунках явно-полюсних, так і неявно-полюсних машин.
При вирішенні завдань, пов'язаних або з синхронними генераторами, включеними паралельно з мережею, або синхронними двигунами, користуються кутовими характеристикамисинхронних машин, що являють собою залежність електромагнітного моменту М від кута навантаження θ. При цьому слід пам'ятати, що в синхронних явно полюсних машинах діють два моменти: основний М осн та реактивний М р,а в неявнополюсних машинах - лише основний момент:
![]()
Кут навантаження θ ном відповідає номінальному моменту М ном. Максимальний момент синхронної машини визначає перевантажувальну здатність синхронної машини, що має важливе значення як для синхронних генераторів, що працюють паралельно з мережею, так і для синхронних двигунів. У неявнополюсних синхронних машинах максимальний момент відповідає куту навантаження θ = 90°, у явнополюсних машинах θ кр< 90° и обычно составляет 60 - 80° в зависимости от соотношения основного и реактивного электромагнитных моментов этой машины.
Для розрахунку критичного кута навантаження, що визначає перевантажувальну здатність явно полюсних синхронних машин, можна скористатися виразом.
На величину крутного моменту асинхронного двигуна великий вплив зсув фаз між струмом I 2 і е. д. с. E 2S ротора.
Розглянемо випадок, коли індуктивність обмотки ротора мала і тому зсув фаз можна знехтувати (фіг. 223, а).
Магнітне поле статора, що обертається, тут замінено полем полюсів N і S, що обертаються, припустимо, у напрямку годинникової стрілки. Користуючись правилом правої руки, Визначаємо напрям е. д. с. та струмів в обмотці ротора. Струми ротора, взаємодіючи з магнітним полем, що обертається, створюють момент обертання. Напрями сил, які діють провідники зі струмом, визначаються за правилом лівої руки. Як видно з креслення, ротор під дією сил буде обертатися в ту ж сторону, що і поле, що обертається, тобто за годинниковою стрілкою.
Розглянемо другий випадок, коли індуктивність ротора обмотки велика. У цьому випадку зсув фаз між струмом ротора I 2 та е. д. с. ротора Е 2S буде також більшим. На фіг. 223 б магнітне поле статора асинхронного двигуна як і показано у вигляді обертових у напрямку годинникової стрілки полюсів N і S. Напрямок індуктованої в обмотці ротора е. д. с. залишається таким самим, як і на фіг. 223 а, але внаслідок запізнення струму по фазі вісь магнітного поляротора не буде збігатися з нейтральною лінією поля статора, а зміститься на деякий кут проти обертання магнітного поля. Це призведе до того, що поряд з утворенням крутного моменту, спрямованого в один бік, деякі провідники створять зустрічний крутний момент.
Звідси видно, що загальний момент двигуна при зсуві фаз між струмом і е. д. с. ротора менше, ніж випадку, коли I 2 і Е 2S збігаються по фазі. Можна довести, що момент асинхронного двигуна, що обертає, обумовлюється тільки активною складовою струму ротора, тобто струмом I 2 cos і що він може бути обчислений за формулою:

Ф m -магнітний потік статора (а також приблизно рівний результуючого магнітного потоку асинхронного двигуна);
Кут зсуву фаз між е. д. с. та струмом фази обмотки
С – постійний коефіцієнт.
Після підстановки:
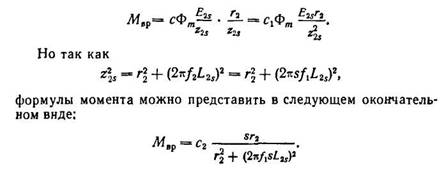
З останнього виразу видно, що крутний момент асинхронного двигуна залежить від ковзання.
На фіг. 224 зображена крива А залежності крутного моменту двигуна від ковзання. З кривої видно, що в момент пуску, коли s = l і n = 0, момент двигуна, що обертає, невеликий. Це тим, що у момент пуску частота струму в обмотці ротора найбільша і індуктивне опір обмотки велико. Внаслідок цього cos має мале значення (по-
|
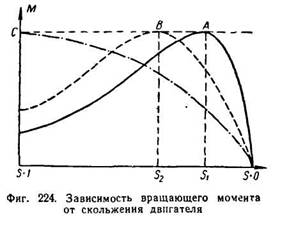
рядка 0,1-0,2). Тому, незважаючи на велику величину пускового струму, пусковий крутний момент буде невеликим.
При деякому ковзанні S 1 крутний момент двигуна матиме максимальне значення. При подальшому зменшенні ковзання або, інакше кажучи, при далечині, найменшому збільшенні швидкості обертання двигуна його момент буде швидко умінь-
Шатися і при ковзанні s = 0 момент обертання двигуна також дорівнює нулю.
Слід зазначити, що в асинхронного двигуна ковзання, що дорівнює нулю, практично не може. Це можливо лише в тому випадку, якщо ротору повідомити ззовні крутний момент у бік обертання поля статора.
Пусковий моментможна збільшити, якщо в момент пуску зменшити зсув фаз між струмом та е. д. с. ротора. З формули
видно, що якщо при постійному індуктивному опорі обмотки ротора збільшити активний опір, то і сам кут зменшуватимуться, що призведе до того, що і момент двигуна, що обертає, стануть більше. Цим користуються на практиці для збільшення пускового крутного моменту двигуна. У момент пуску в ланцюг ротора вводять активний опір (пусковий реостат), який потім виводять, як двигун збільшить швидкість.
Збільшення пускового моменту призводить до того, що максимальний момент обертання двигуна виходить при більшому ковзанні (точка S 2 кривої B на фіг. 224). Шляхом збільшення активного опору ланцюга ротора при пуску можна домогтися того, що максимальний момент, що обертає, буде в момент пуску (s = 1 кривої С).
Обертовий момент асинхронного двигуна пропорційний квадрату напруги, тому навіть невелике зменшення напруги супроводжується різким зменшенням моменту, що обертає.
Потужність P 1 підводиться до обмотки статора асинхронного двигуна, дорівнює:
![]()
де m 1 - Число фаз.
У статорі двигуна є такі втрати енергії:
1) в обмотці статора Рес. =m 1 I 1 2 r 1;
2) стали статора іа гістерезис і вихрові струми Р C .
Потужність, що підводиться до ротора, являє собою потужність магнітного поля, що обертається, звану також електромагнітною потужністю Р еM .
Електромагнітна потужність дорівнює різниці між потужністю, що підводиться до двигуна, і втратами в статорі двигуна, тобто.
|

Різниця між Р еM і являє собою електричні втрати в обмотці ротора Р еP , якщо знехтувати втратами сталі ротора через їх незначність (частота перемагнічування ротора зазвичай дуже мала):

Отже, втрати в обмотці ротора пропорційні ковзанню ротора.
Якщо з механічної потужностірозвивається ротором, відняти механічні потерн Р мох зумовлені тертям в підшипниках ротора, тертям повітря і т. п., а також додаткові втрати Р Д, що виникають при навантаженні і обумовлені полями розсіювання ротора, і втрати, що викликаються: пульсаціями магнітного поля в зубцях статора і ротора, залишиться корисна потужність на валу двигуна, яку позначимо через P 2 .
асинхронного двигуна може бути визначений за формулою:

З останнього виразу видно, що момент обертання асинхронного двигуна пропорційний добутку з величини магнітного потоку, що обертається, струму ротора і косинуса кута між е. д. с. ротора та його струмом,

Зі схеми заміщення асинхронного двигуна виходить величина наведеного струму ротора, яку ми наводимо без доказу.