การควบคุมความถี่ของการหมุนของไดรฟ์ไฟฟ้าเป็นหนึ่งในงานที่สำคัญที่สุดของวิศวกรรมไฟฟ้าสมัยใหม่ การพัฒนาและการประยุกต์ใช้วิธีการควบคุมที่มีเหตุผลสามารถเพิ่มผลผลิตของกลไก ปรับปรุงคุณภาพของผลิตภัณฑ์ ลดความซับซ้อนของส่วนกลไกของไดรฟ์ ลดการใช้พลังงาน ฯลฯ
เนื่องจากลักษณะการเคลื่อนที่ถูกจำกัด ทำให้เครื่องยนต์มีเสียงสะท้อน ยิ่งขั้นตอนพื้นฐานน้อยเท่าใด แนวโน้มการสั่นพ้องก็จะน้อยลงเท่านั้น การสั่นพ้องยังขึ้นอยู่กับลักษณะของโหลด ยิ่งเฉื่อยและน่ากลัวน้อยกว่า แนวโน้มที่จะสะท้อนที่ความถี่บางช่วงก็จะยิ่งมากขึ้น ในกรณีสุดโต่งของการสั่นพ้อง มอเตอร์จะล้มเหลวและหยุดนิ่งหรือทำงานอย่างไม่สามารถควบคุมได้ ทำให้การเคลื่อนไหวไม่ถูกต้อง พฤติกรรมนี้ของมอเตอร์มักจะสังเกตได้เมื่อเคลื่อนที่เต็มขั้นที่ความถี่ต่างๆ ที่ต่ำกว่า 300 เฮิรตซ์เท่านั้น
เมื่อทำงานในโหมด half-speed และ micro-manual มอเตอร์จะทำตามความเร็วและตำแหน่งที่ตั้งไว้เสมอ ซึ่งจะเพิ่มเสียงรบกวนและการสั่นสะเทือนที่ความถี่เรโซแนนซ์ ยิ่งกล้องจุลทรรศน์สูง ความถี่เรโซแนนซ์ก็จะยิ่งต่ำลง ถาม: แอปพลิเคชันเฉพาะของฉันต้องการ ความเร็วสูงหมุน เป็นการดีที่สุดที่จะทดสอบด้วยคำสั่งขั้นตอน โดยเริ่มจากค่าที่ต่ำและค่อยๆ เพิ่มความถี่เป็นค่าที่คุณต้องการ โปรดทราบว่าความถี่สูงสุดที่เพิ่มขึ้นอย่างค่อยเป็นค่อยไปจะต้องมีความสมมาตรและอยู่ระหว่างการเปลี่ยนผ่านเป็นจุดเริ่มต้น-หยุด
ด้วยการควบคุมความเร็ว ไม่ควรสับสนกับการเปลี่ยนแปลงตามธรรมชาติของความเร็วของมอเตอร์ไฟฟ้าตามลักษณะทางกลของมันเมื่อภาระบนเพลาขับเปลี่ยนไป ข้อบังคับคือการเปลี่ยนแปลงแบบบังคับในความเร็วในการหมุนของไดรฟ์ไฟฟ้า ขึ้นอยู่กับข้อกำหนดของกลไกการขับเคลื่อน
ขั้นแรกให้กำหนดความถี่ในการเริ่ม-หยุดที่เหมาะสม จากนั้นเพิ่มเป็นความถี่ที่ต้องการ หากสถานการณ์เป็นที่น่าพอใจแล้ว ตรวจสอบให้แน่ใจว่าความถี่ลดลงอย่างราบรื่นก่อนที่จะเริ่มหยุด นี่เป็นเรื่องจริง โปรไฟล์ความเร็ว "สี่เหลี่ยมคางหมู" หากผลลัพธ์ไม่เป็นไปตามความเร็ว ให้ลอง
โมดูลนี้มาพร้อมกับแรงดันไฟฟ้าที่สูงกว่าข้างต้น โปรดจำไว้ว่าหลังจากการเคลื่อนไหวแต่ละครั้ง การเคลื่อนไหวครั้งต่อไปต้องใช้เวลาเพิ่มเติมเพื่อทำให้โรเตอร์สงบลง ซึ่งก็คือมิลลิวินาที สำหรับการกลับตัวที่จะเกิดขึ้น เวลานี้ควรจะนานกว่านั้น ลองเช่นเดียวกันกับจักรยานที่ทรงพลังกว่า ที่ค่าที่สูงขึ้น กระแสการยึดเกาะที่สูงขึ้นจะส่งผลให้มอเตอร์และโมดูลควบคุมมีความร้อนสูงขึ้น และอาจต้องการการระบายความร้อนแบบบังคับเพิ่มเติมด้วยพัดลมโมดูลและแม้กระทั่งกับมอเตอร์
วิธีการควบคุมใด ๆ มีลักษณะตามตัวชี้วัดหลักดังต่อไปนี้:
ช่วงการควบคุม - อัตราส่วนของความเร็วสูงสุดถึงต่ำสุดซึ่งสามารถหาได้ในไดรฟ์เช่น ;
ความราบรื่นของการควบคุม - จำนวนความเร็วคงที่ที่ได้รับในช่วงการควบคุมที่กำหนด
ประสิทธิภาพ - คำนึงถึงต้นทุนที่เกี่ยวข้องกับการสร้างวิธีการควบคุมและการสูญเสียพลังงานเพิ่มเติมที่เกิดขึ้นในไดรฟ์
ความเร็วในการหมุนสูงสุด
ติดต่อผู้ผลิตโมดูลควบคุมที่คุณเลือก! ระหว่างการทำงานของไดรฟ์ ช่วงของการประหยัดที่เป็นไปได้มักจะเกี่ยวข้องกับลักษณะแรงบิดของโหลด ในระบบที่มีการแก้ไข ลักษณะพลังงานการใช้พลังงานเป็นสัดส่วนโดยตรงกับการลดแรงบิดและความเร็วของเพลา ในขณะที่การใช้งานแรงบิดแบบแปรผันที่มีลักษณะโหลดเป็นสี่เหลี่ยม การใช้พลังงานจะแตกต่างกันไปตามกำลังที่สามต่อความเร็วของการหมุน
ความเสถียรของไดรฟ์ - การเปลี่ยนแปลงความเร็วในการหมุนด้วยการเปลี่ยนแปลงของแรงบิดบนเพลามอเตอร์ ความเสถียรของงานถูกกำหนดโดยความแข็งแกร่งของลักษณะทางกลทั้งหมด
ทิศทางของการควบคุมบ่งชี้ว่าความเร็วจะเปลี่ยนเฉพาะลงหรือขึ้นจากความเร็วหลักของไดรฟ์เท่านั้น หรืออาจปรับทั้งการควบคุมขึ้นและลงได้
ด้วยเหตุผลนี้ การควบคุมความเร็วของมอเตอร์ของเครื่องจักรมักจะส่งผลให้ได้ประโยชน์ด้านพลังงานที่สามารถเห็นได้อย่างรวดเร็วในค่าไฟฟ้า อย่างไรก็ตาม การเปลี่ยนแปลงความเร็วอย่างง่ายไม่ได้รับประกันการประหยัดที่คาดหวัง ปัจจัยด้านประสิทธิภาพสำหรับสามเฟส มอเตอร์เหนี่ยวนำมักจะให้เฉพาะจุดเล็กน้อยเท่านั้น หากมอเตอร์ทำงานโดยตรงจากเครือข่ายที่มีโหลดที่กำหนด ประสิทธิภาพของมอเตอร์จะลดลงอย่างมากเนื่องจากการสูญเสียทางกลและทางแม่เหล็กไฟฟ้าอย่างต่อเนื่อง
ทำงานกับ ตัวแปลงความถี่ช่วยให้มั่นใจได้ถึงแรงแม่เหล็กสูงสุดของมอเตอร์ขึ้นอยู่กับคุณภาพของวิธีการควบคุม ดังนั้นเมื่อใช้ตัวแปลงสัมประสิทธิ์ การกระทำที่เป็นประโยชน์ของโรงไฟฟ้าทั้งหมดไม่ตกมากเมื่อทำงานกับเครื่องยนต์ที่ใช้พลังงานต่ำ การปรับปรุงที่เห็นได้ชัดเจนมักใช้กับมอเตอร์ที่มีขนาดเกิน 11kW
ความเร็วโรเตอร์ของมอเตอร์แบบอะซิงโครนัสถูกกำหนดโดยสูตร:
โดยที่ f คือความถี่ของกระแสสลับ p คือจำนวนคู่ของเสาขดลวดสเตเตอร์ ส - สลิป
จากสูตรข้างต้น เราสามารถสรุปได้ว่าความเร็วของมอเตอร์เหนี่ยวนำสามารถควบคุมได้โดยการเปลี่ยนค่าใดค่าหนึ่งจากสามค่าต่อไปนี้:
ส่งผลให้การสูญเสียสายไฟลดลง ตัวอย่างการปฏิบัติ: ด้วยการเริ่มใช้งานระบบขับเคลื่อนแบบโรตารี่ในไตรมาสนี้ การสตาร์ทลดลงอย่างเห็นได้ชัด ดังนั้นจึงทำให้ภาระทางกลในระบบ ในการใช้งานที่ไม่มีการเปลี่ยนแปลงการโหลดอย่างรวดเร็ว ผู้ใช้สามารถใช้การเพิ่มประสิทธิภาพพลังงานอัตโนมัติได้ อินเวอร์เตอร์จะลดการสะกดจิตของมอเตอร์ให้เหลือน้อยที่สุด ผลที่ได้คือการประหยัดพลังงานเพิ่มเติมเมื่อเทียบกับการหมุนเวียนที่ลดลง
ฟังก์ชันนี้ทำงานได้ดีสำหรับการปรับที่ช้าทั้งหมดซึ่งมักพบในระบบอัตโนมัติของปั๊มและพัดลม รอบการเริ่มต้นที่ลดลง การควบคุมความเร็วสามารถลดจำนวนการเริ่มต้นใช้งานในหลาย ๆ แอปพลิเคชัน การสตาร์ทมอเตอร์ไฟฟ้าโดยไม่ได้รับการควบคุมใดๆ ต้องใช้พลังงานเพิ่มเติม ในกรณีของปั๊ม การใช้พลังงานสำหรับการสตาร์ทมักจะ 5-10% ของปริมาณการใช้ทั้งหมด แต่มีตัวอย่างที่ต้องใช้พลังงานมากถึง 40% สำหรับการสตาร์ท
ใบ;
จำนวนคู่ของขั้วของฟลักซ์แม่เหล็กสเตเตอร์ p;
ความถี่ปัจจุบันของสเตเตอร์ฉ
ให้เราพิจารณาความเป็นไปได้ในการควบคุมความเร็วของโรเตอร์โดยการเปลี่ยนสลิป สลิปเป็นหน้าที่ของพารามิเตอร์ต่างๆ ของเครื่องยนต์:
s = f(R 1 , X 1 ;R 2 ; X 2 ; U)
โดยที่ R 1 X 1 - ความต้านทานเชิงแอคทีฟและอุปนัยของวงจรสเตเตอร์; R 2 , X 2 - เหมือนกันโรเตอร์;
นอกจากนี้ กระแสไฟสูงสุดและแรงกระแทกทางกลในระหว่างการสตาร์ทเครื่องจะลดลง ประโยชน์อื่นๆ ของอายุการใช้งานที่ยาวนานขึ้นเนื่องจากความเค้นทางกลที่ลดลงในส่วนประกอบ ความเป็นไปได้ทั้งหมดนี้มีให้ในฟังก์ชันซอฟต์แวร์ในตัวของตัวแปลงความถี่ที่ทันสมัย
การปรับแรงบิดและความเร็วรอบให้เหมาะสมที่สุด จึงสามารถเพิ่มประสิทธิภาพการใช้พลังงานได้ในการใช้งานแรงบิดคงที่หลายๆ แบบ สำหรับการใช้งานกับ ลักษณะคงที่แรงบิดของโหลด เช่น มีการเปลี่ยนแปลงโหลดเล็กน้อยโดยเปลี่ยนความเร็วรอบในขอบเขตที่กว้างกว่า เหนือสิ่งอื่นใดก็มีสายพานลำเลียงของสายการผลิต, สายพานลำเลียง, ลิฟต์, เครื่องกวน, โรงสี
U - แรงดันไฟฟ้าของมอเตอร์
จะเห็นได้จากสูตรที่ว่าในการเปลี่ยนสลิป ตัวต้านทานหรือตัวเหนี่ยวนำเพิ่มเติมสามารถใส่เข้าไปในสเตเตอร์หรือวงจรขดลวดของโรเตอร์ หรือแรงดันไฟของมอเตอร์จะลดลง
การเปลี่ยนแปลงแรงดันไฟฟ้า
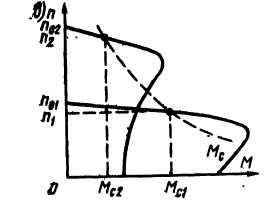
เป็นที่ทราบกันดีอยู่แล้วว่าแรงบิดสูงสุดของมอเตอร์เหนี่ยวนำเป็นสัดส่วนกับกำลังสองของแรงดันไฟหลัก และลักษณะทางกลที่แรงดันไฟฟ้าต่างๆ มีรูปแบบดังแสดงในรูปที่ 5.8, a การวิเคราะห์คุณลักษณะเหล่านี้ร่วมกับคุณลักษณะของโมเมนต์ความต้านทาน Ms.g ของอุปกรณ์รอก แสดงให้เห็นว่าการควบคุมความเร็วสามารถทำได้ในช่วงที่แคบมาก ที่แรงดันไฟฟ้า 0.6 U n เครื่องยนต์จะไม่สตาร์ทเนื่องจาก Mp<Мс.г, а при снижении напряжения ниже 0,6 UB работающий двигатель остановится.
เมื่อพิจารณาจากตัวอย่างการใช้ feeder เมื่อร่างกายของเครื่องยนต์ที่ติดตั้งบนรถอยู่บนสายพานทำงาน เห็นได้ชัดว่าน้ำหนักของตัวรถจะเท่ากันเสมอ ไม่ว่าสายพานจะเคลื่อนที่เร็วหรือช้า . ดังนั้นเวลาที่ใช้ในการย้ายบล็อกนั้นจึงเท่าเดิม แน่นอนว่าเวลาเสียดสีและการเร่งความเร็วจะเปลี่ยนแปลงไปตามสภาพการทำงาน แต่ความต้องการโหลดจะคงที่ กำลังที่ต้องการโดยระบบนี้เป็นสัดส่วนกับแรงบิดและความเร็วของเครื่องยนต์ที่ต้องการ
หากความเร็วรอบสามารถลดลงได้ภายใต้ภาระคงที่ การประหยัดพลังงานก็จะมองเห็นได้ในทันที บ่อยครั้งปริมาณสินค้าที่ขนส่งบนสายพานไม่คงที่ หากความเร็วของสายพานตรงกับปริมาณของวัสดุที่ขนส่ง สิ่งนี้จะไม่เพียงรับประกันการขนย้ายที่ราบรื่นและต่อเนื่อง แต่ยังรวมถึงพลังงานที่จำเป็นด้วย อย่างไรก็ตาม หากไม่สามารถควบคุมความเร็วได้หรือไม่ต้องการ ก็สามารถประหยัดพลังงานสำหรับเครื่องแปลงความถี่ส่วนใหญ่ได้ พวกเขาควบคุมแรงดันขาออกของมอเตอร์ขึ้นอยู่กับโหลด
ค่อนข้างดีกว่าในการควบคุมมอเตอร์ที่หมุนกลไกด้วยแรงบิดต้านทานพัดลม Ms.v - ช่วงการควบคุมขยาย
การเปลี่ยนพารามิเตอร์ R 1 , X 1 , X 2
การเพิ่มขึ้นของพารามิเตอร์เหล่านี้มีผลเกือบเหมือนกันกับลักษณะทางกลของมอเตอร์เมื่อแรงดันไฟฟ้าลดลง และการเพิ่มความต้านทาน R 1 ยังเพิ่มการสูญเสียพลังงานในวงจรสเตเตอร์ด้วย
โหลดเพิ่มขึ้นเมื่อแรงดันไฟฟ้าเพิ่มขึ้น คุณภาพของการควบคุมนี้พิจารณาจากคุณภาพของอินเวอร์เตอร์ อย่างไรก็ตาม การประหยัดพลังงานแบบเดียวกับที่คุณได้รับจากคุณลักษณะนี้ไม่เพียงพอต่อการลงทุนในตัวแปลงความถี่ ที่ความเร็วการหมุนที่ลดลง ความต้องการพลังงานจะลดลงตามกำลังที่สาม การใช้ตัวแปลงความถี่เพื่อควบคุมพัดลมและปั๊มหอยโข่งได้ลดลงในการใช้งานหลายอย่างในเวลาน้อยกว่าสองปี
ระบบควบคุมความเร็วของปั๊มและพัดลมเป็นการใช้งานทั่วไปที่สุดสำหรับไดรฟ์แรงบิดแบบแปรผันที่มีลักษณะเป็นสี่เหลี่ยมจัตุรัส อย่างไรก็ตาม ในกรณีของปั๊ม สิ่งสำคัญคือต้องแยกความแตกต่างระหว่างปั๊มส่วนต่อพ่วงที่ใช้กันอย่างแพร่หลายซึ่งมีลักษณะแรงบิดผันแปรจากปั๊มนอกรีต สุญญากาศ หรือปั๊มดิสเพลสเมนต์เชิงบวกซึ่งมีโหลดแรงบิดคงที่
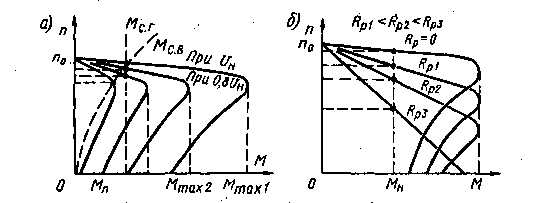
รูปที่ 5.8 ลักษณะทางกลของมอเตอร์แบบอะซิงโครนัสเมื่อเปลี่ยน
แรงดันและความต้านทานของวงจรโรเตอร์
ในตอนท้ายของยุค 50 ไดรฟ์ไฟฟ้าเค้นที่เรียกว่าได้รับการกระจายบางส่วนซึ่งความต้านทานเพิ่มขึ้น X 1 ทำได้โดยการรวมแอมพลิฟายเออร์แม่เหล็ก (ตัวเหนี่ยวนำความอิ่มตัว) ไว้ในวงจรสเตเตอร์ ข้อเสียเปรียบหลักของไดรฟ์ไฟฟ้าดังกล่าว (รวมถึงเมื่อแรงดันไฟฟ้า U เปลี่ยนแปลง) คือกำลังเลื่อนจะถูกแปลงเป็นความร้อนในโรเตอร์โดยสมบูรณ์ ทำให้มอเตอร์ร้อนเกินไป ในโช้คไดรฟ์ ปัจจัยด้านกำลัง cosf ก็ลดลงเช่นกัน
จำนวนเครื่องสูบน้ำและพัดลมเป็นจำนวนมาก ประมาณ 70% ของพลังงานที่ใช้เพื่ออุตสาหกรรมทั่วทั้งสหภาพยุโรปคือมอเตอร์ไฟฟ้า ในขณะที่ปั๊มและพัดลมมีสัดส่วนประมาณ 37% วิธีที่ง่ายแต่มีประสิทธิภาพมากในการประหยัดพลังงานในเครื่องจักรที่มีความเร็วหลายระดับคือการควบคุมความเร็ว ด้วยความเร็วรอบที่ลดลง ความต้องการพลังงานจะลดลงเหลือกำลังที่สาม ศักยภาพด้านความคุ้มค่าสูงนี้ทำให้การใช้งานทุกตารางเมตรเหมาะอย่างยิ่งสำหรับการวิเคราะห์ประสิทธิภาพการใช้พลังงาน
นอกจากลักษณะของปั๊มและระบบแล้ว เส้นโค้งลักษณะเฉพาะ พร้อมกับลักษณะของปั๊มและระบบ ยังแสดงกราฟแสดงประสิทธิภาพหลายเส้นด้วย ทั้งในการควบคุมคันเร่งและการควบคุมความเร็ว จุดปฏิบัติงานอยู่นอกปัจจัยด้านประสิทธิภาพที่เหมาะสมที่สุด
จากที่กล่าวมาข้างต้น การเพิ่มขึ้นของพารามิเตอร์ R 1 X 1 X 2 หรือ U ลดลง ไม่เพียงแต่เพื่อการควบคุมความเร็วเท่านั้น แต่ยังเกิดจากสาเหตุอื่นๆ อีกด้วย (เช่น อิทธิพลของพารามิเตอร์เครือข่าย) คือ ไม่พึงปรารถนาอย่างมากสำหรับมอเตอร์แบบอะซิงโครนัส
เปลี่ยนความต้านทานเชิงแอคทีฟของวงจรโรเตอร์
พารามิเตอร์เดียวของมอเตอร์แบบอะซิงโครนัสซึ่งแรงบิดสูงสุดของมอเตอร์ไม่ขึ้นกับคือความต้านทาน R 2 . ดังนั้น เมื่อมีการเพิ่มตัวต้านทานเพิ่มเติมในวงจรโรเตอร์ ความจุเกินทางกลของมอเตอร์จะถูกรักษาไว้ และซึ่งเป็นสิ่งสำคัญมาก การสูญเสียพลังงานส่วนใหญ่จะถูกปล่อยออกมาบนตัวต้านทาน กล่าวคือ ภายนอกมอเตอร์
เพื่อหลีกเลี่ยงความประหลาดใจเมื่อตั้งค่าความเร็วของปั๊มและพัดลม ผู้ใช้ต้องจำในขั้นตอนการออกแบบว่าความเร็วในการเปลี่ยนจะเปลี่ยนจุดทำงานและปัจจัยด้านประสิทธิภาพของเครื่องไหลด้วย การประกอบเครื่องไหลและไดรฟ์ความเร็วตัวแปรแบบปรับความเร็วได้คือระบบที่ช่วยประหยัดพลังงาน หากความแตกต่างระหว่างการดึงกำลังสูงสุดและปริมาณงานเฉลี่ยที่มีมอเตอร์ไม่เพียงพอมีขนาดใหญ่เกินไป ระบบคาสเคดจะเป็นทางออกที่ดี
วิธีนี้ใช้ได้กับมอเตอร์ที่มีเฟสโรเตอร์และวงแหวนเท่านั้น แทบจะเป็นไปไม่ได้เลยที่จะเปลี่ยนความต้านทานของโรเตอร์กรงกระรอก ลักษณะทางกลสำหรับความต้านทานโรเตอร์ต่างๆ แสดงในรูปที่ 5.8, b.
กระบวนการควบคุมโดยสังเขปมีดังนี้: M=Ms, n=const;  -
- -
- -
- -
- -
- -
- -
- . รายการอธิบายโดยสูตร (2-6)
. รายการอธิบายโดยสูตร (2-6)
นอกจากนี้ เมื่อปรับโครงสร้างระบบที่มีอยู่ การลงทุนดังกล่าวจะได้รับคืนหลังจากช่วงเวลาสั้นๆ ในระบบน้ำตก ปั๊มควบคุมความเร็วครอบคลุมข้อกำหนดพื้นฐาน ทันทีที่มีความต้องการเพิ่มขึ้น ตัวแปลงความถี่จะสลับไปที่ปั๊มถัดไป ด้วยวิธีนี้ ปั๊มจะทำงานได้อย่างเต็มประสิทธิภาพด้วยประสิทธิภาพสูงสุด การควบคุมปั๊มช่วยให้มั่นใจได้ว่าระบบจะใช้พลังงานได้อย่างดีที่สุด การออกแบบเดียวกันนี้สามารถนำไปใช้กับส่วนประกอบพัดลมได้เช่นเดียวกัน
ขึ้นอยู่กับผู้ผลิตและรุ่น ตัวควบคุมคาสเคดมีอยู่แล้วในอินเวอร์เตอร์หรือพร้อมใช้งานเป็นโมดูลภายนอก กราฟแสดงการใช้พลังงานของปั๊มที่เลือกที่การควบคุมความเร็ว - ที่น้อยกว่า 32 Hz การสูญเสียปั๊มเพิ่มเติมมีค่ามากกว่าการประหยัด ในอุปกรณ์ที่นำเสนอ ความถี่พลังงานที่เหมาะสมคือ 38 Hz - หากปั๊มไม่มีการควบคุมความเร็ว ความสมดุลของพลังงานจะแย่ลงมาก
จากมุมมองของช่วงของการควบคุม ความราบรื่น ประสิทธิภาพ วิธีการนี้จะคล้ายกับการควบคุมความเร็วของมอเตอร์กระแสตรงโดยการเปลี่ยนความต้านทานของวงจรกระดอง มันถูกใช้ในไดรฟ์ไฟฟ้าของกว้านและกว้านของเรือ Andijan และ Povenets
เปลี่ยนจำนวนคู่ของเสา
มอเตอร์แบบอะซิงโครนัสซึ่งขดลวดสเตเตอร์สามเฟสสามารถสร้างสนามแม่เหล็กหมุนได้โดยใช้จำนวนคู่ขั้วต่างกัน
ระบบปั๊มหรือช่องระบายอากาศส่วนใหญ่ใช้วาล์ว บานเกล็ด วาล์วปีกผีเสื้อ หรือวาล์วสามทางเพื่อควบคุมแรงดันหรือการไหล หากการควบคุมปั๊มแบบโรตารี่ถูกควบคุมโดยวาล์วปีกผีเสื้อ จุดทำงานจะเคลื่อนไปตามเส้นกราฟประสิทธิภาพของปั๊ม
จำเป็นต้องมีการลดพลังงานที่ต้องการขั้นต่ำเมื่อเปรียบเทียบกับความต้องการที่จุดทำงานที่กำหนดของปั๊ม เมื่อปรับเอาต์พุตของปั๊มโดยการเปลี่ยนความเร็วในการหมุน จุดหน้าที่จะเคลื่อนที่ไปตามเส้นโค้งของระบบ ด้วยวิธีการควบคุมนี้ ความต้องการพลังงานลดลงเหลือกำลังที่สามเมื่อเทียบกับการควบคุมปริมาณ! ตัวอย่างเช่น ปั๊มต้องการความเร็วในการหมุนเพียงครึ่งเดียวของการใช้พลังงานเพียงหนึ่งในแปด
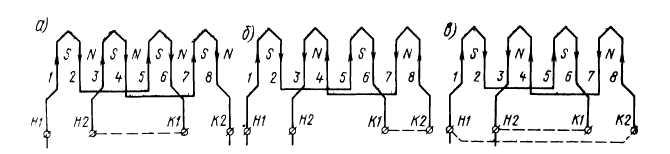
รูปที่ 5.9 แผนภาพอธิบายหลักการของการได้รับโพลสวิตช์
เรียกว่าขั้วสลับได้ ขดลวดสามเฟสได้รับการพัฒนาขึ้นซึ่งสามารถเปลี่ยนเป็นจำนวนคู่ขั้วที่แตกต่างกันในอัตราส่วน: 2:1, 5:2, 7:3, 3:1 เป็นต้น
ให้เราอธิบายหลักการของการสร้างการม้วนแบบโพลสวิตซ์โดยใช้ตัวอย่างการม้วนแบบเฟสเดียวในแปดร่อง ขดลวดประกอบด้วยสองขดลวดครึ่ง หากต่อครึ่งขดลวดเป็นอนุกรมนั่นคือจัมเปอร์จะอยู่ระหว่างขั้ว K 1 และ H 2 (รูปที่ 5.9, a) จากนั้นขดลวดดังกล่าวจะสร้างเสาสี่คู่ (p = 4) จำนวนเสาที่สร้างโดยขดลวดสามารถหาได้โดยการระบุทิศทางของกระแสในนั้นและใช้กฎวงแหวนเพื่อกำหนดทิศทางของเส้นแรงรอบช่อง
หากขดลวดครึ่งหนึ่งเชื่อมต่อแบบแบ็คทูแบ็กนั่นคือ จัมเปอร์ระหว่างขั้ว K 1 และ K 2 (รูปที่ 9, b) จากนั้นขดลวดดังกล่าวจะสร้างเสาสองคู่ (p \u003d 2) ด้วยทิศทางปัจจุบันที่เลือก ฟิลด์ระหว่างช่อง 2 และ 3, 4 และ 5, 6 และ 7, 8 และ 1 จะยกเลิกซึ่งกันและกัน
ครึ่งขดลวดสามารถเชื่อมต่อแบบ back-to-back เช่น จัมเปอร์ระหว่างขั้ว H 1 และ K 2, H 2 และ K 1 (รูปที่ 9, c) จากนั้นขดลวดจะสร้างเสาสองคู่ (p = 2)
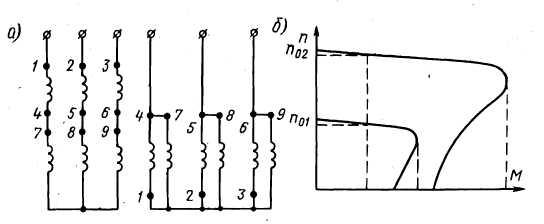
ดังนั้น มีสองวิธีในการเปลี่ยนขดลวดเป็นจำนวนคู่ขั้วที่น้อยกว่าในอัตราส่วน 2:1 วิธีแรกคือการเปลี่ยนจากการเชื่อมต่อแบบครึ่งขดลวดเป็นการเชื่อมต่อแบบอนุกรม วิธีที่สองคือการเปลี่ยนจากการเชื่อมต่อแบบอนุกรมเป็นการเชื่อมต่อแบบป้องกันขนาน พิจารณาแต่ละวิธีที่เกี่ยวข้องกับการพันมอเตอร์สามเฟส
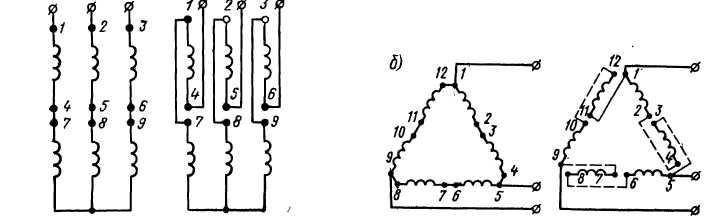
ด้วยวิธีการเปลี่ยนครั้งแรก ขดลวดที่เชื่อมต่อด้วยดาวจะต้องมี 9 ขั้วบนโล่ (รูปที่ 5.10, a) และเมื่อเชื่อมต่อด้วยรูปสามเหลี่ยม 12 ขั้ว (รูปที่ 5.10, b) หลังจากสลับแล้ว ลักษณะการเชื่อมต่อของขดลวดจะไม่เปลี่ยนแปลง กล่าวคือ ดาวจะเปลี่ยนเป็นดาว และรูปสามเหลี่ยมเป็นรูปสามเหลี่ยม
กำลังของเครื่องยนต์ในวิธีการเปลี่ยนครั้งแรกยังคงที่ ดังนั้นแรงบิดเครื่องยนต์เล็กน้อยและสูงสุดจะเปลี่ยนไป การพิจารณาร่วมกันของคุณสมบัติทางกลของเครื่องยนต์และกลไกต่างๆ (รูปที่ 5.10, c) แสดงให้เห็นว่าวิธีการเปลี่ยนนี้เหมาะสมที่สุดสำหรับการควบคุมความเร็วของเครื่องมือเครื่องตัดโลหะ
ในไดรฟ์ไฟฟ้าทางทะเลของอุปกรณ์รอก กว้าน กว้าน มอเตอร์แบบอะซิงโครนัสสามความเร็วพร้อมขดลวดสามขดลวดแยกกันบนสเตเตอร์สำหรับจำนวนคู่ขั้วที่แตกต่างกัน
ในวิธีการสลับที่สอง ขดลวดที่เชื่อมต่อกับดาวมีเพียง 6 ลีด (รูปที่ 5.11, a) หลังจากสลับแล้วจะได้รับการเชื่อมต่อที่คดเคี้ยวสองดาว กำลังมอเตอร์ในกรณีนี้เพิ่มขึ้นเป็นสองเท่า และแรงบิดที่กำหนดยังคงที่
การพิจารณาร่วมกันของลักษณะทางกลของเครื่องยนต์และกลไกต่างๆ (รูปที่ 5.11, b) แสดงให้เห็นว่าควรใช้วิธีการสลับที่สองเพื่อควบคุมความเร็วในการหมุนของอุปกรณ์ยกน้ำหนัก
หากขดลวดเชื่อมต่อในเดลต้าหลังจากเปลี่ยนตามวิธีที่สองจะได้รับการเชื่อมต่อแบบดับเบิ้ลสตาร์ กำลังเครื่องยนต์เพิ่มขึ้น 15%
วิธีที่ง่ายที่สุดในการสลับขดลวดซึ่งให้ความเร็วสองขั้นตอน ด้วยการสลับขดลวดสามเฟสที่ซับซ้อนยิ่งขึ้น คุณจะได้รับสามหรือสี่ขั้นตอนความเร็วด้วยมากที่สุด อัตราส่วนต่าง ๆ ของเสา ตัวอย่างเช่น มอเตอร์ในประเทศของซีรีย์ MAP ที่มีขดลวดสามเฟสหนึ่งอันมีสามความเร็ว (MAP-42/8-4-2, กำลัง 0.8/1, 8/2 kW, ความเร็วในการหมุน 700/1400/2800 รอบต่อนาที) และสี่ ( MAP-52/8-6-4-2, กำลัง 1.2/2.5/3/4 kW, ความเร็วในการหมุน 460/700/920/1440 rpm). ในทางปฏิบัติไม่มีความเร็วมากกว่าสี่ความเร็วเนื่องจากการม้วนและการสลับนั้นซับซ้อนกว่ามาก เครื่องยนต์ MAP-52/8-6-4-2 มี 22 ลีดบนแผงขั้วต่อ
ในไดรฟ์ไฟฟ้าทางทะเลของอุปกรณ์รอก กว้าน กว้าน มอเตอร์แบบอะซิงโครนัสสามความเร็วพร้อมขดลวดสามขดลวดแยกกันบนสเตเตอร์สำหรับจำนวนคู่ขั้วที่แตกต่างกัน ความถี่ในการหมุน
รูปที่ 5.10 วิธีแรกในการเปลี่ยนขดลวดสามเฟสที่เชื่อมต่อด้วยดาว
และรูปสามเหลี่ยมและลักษณะทางกลที่สอดคล้องกันของความดันโลหิต
ถูกควบคุมโดยการเปิดขดลวดอย่างใดอย่างหนึ่ง แต่ตัวม้วนเองไม่เปลี่ยน
อุตสาหกรรมในประเทศผลิตมอเตอร์แบบอะซิงโครนัสแบบหลายความเร็วของซีรีส์ MAP สำหรับไดรฟ์ไฟฟ้าสำหรับเดินทะเล ซึ่งช่วงการควบคุมความเร็วคือ 6:1 หรือ 7:1 ขดลวดความเร็วแรกมักมี 26 หรือ 28 ขั้ว
การควบคุมการสลับขั้วคู่นั้นประหยัดมาก เนื่องจากโรเตอร์หมุนด้วยความถี่คงที่โดยมีการเลื่อนภายในช่วงที่กำหนด และไม่มีตัวต้านทานเพิ่มเติมรวมอยู่ในวงจรมอเตอร์ ข้อเสียอย่างร้ายแรงของวิธีนี้คือการไล่ระดับและความเร็วที่จำกัด
รูปที่ 5.11 วิธีที่สองในการเปลี่ยนขดลวดสามเฟสที่เชื่อมต่อด้วยดาวและ
ลักษณะทางกลที่สอดคล้องกันของมอเตอร์เหนี่ยวนำ
การควบคุมความเร็วในการหมุนโดยการเปลี่ยนความถี่ของกระแสของเครือข่ายอุปทาน (การควบคุมความถี่)
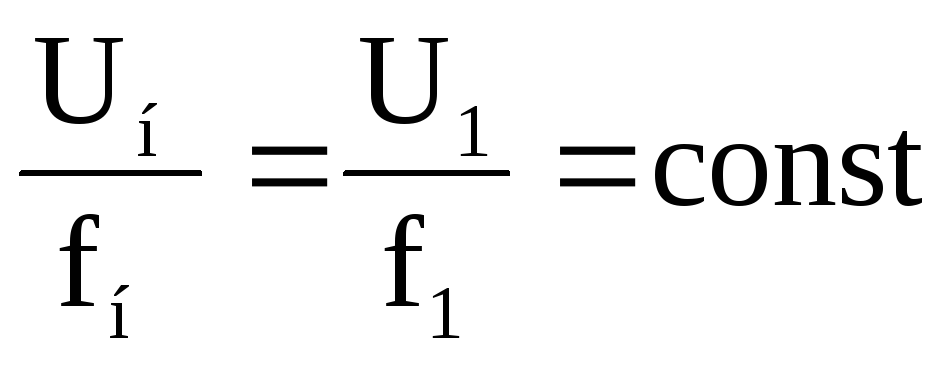
วิธีการควบคุมนี้ขึ้นอยู่กับการเปลี่ยนความเร็วซิงโครนัส n 0 ซึ่งเป็นสัดส่วนกับความถี่ของกระแสในขดลวดสเตเตอร์ ระเบียบนี้ต้องใช้แหล่งจ่ายไฟความถี่ตัวแปร f ใช้ตัวแปลงความถี่แม่เหล็กไฟฟ้าและเซมิคอนดักเตอร์เป็นแหล่งกำเนิด อย่างไรก็ตามต้องระลึกไว้เสมอว่าเมื่อมีการเปลี่ยนแปลงความถี่ของแรงดันไฟฟ้า f แรงบิดแม่เหล็กไฟฟ้าสูงสุดของมอเตอร์จะเปลี่ยนไป ดังนั้น เพื่อรักษาความสามารถในการโอเวอร์โหลด ตัวประกอบกำลัง และประสิทธิภาพของมอเตอร์ในระดับที่ต้องการ จำเป็นต้องเปลี่ยนแรงดันไฟหลัก U พร้อมกันกับการเปลี่ยนแปลงความถี่ f เพื่อให้อัตราส่วนคงที่:
 ;
;
การควบคุมความถี่ช่วยให้คุณเปลี่ยนความเร็วของเครื่องยนต์ได้อย่างราบรื่นในช่วงกว้าง (สูงสุด 12:1)
การควบคุมความเร็วด้วยการเปลี่ยนความถี่ปัจจุบันเป็นวิธีที่สมเหตุสมผลและประหยัดที่สุด ข้อดีหลัก:
ใช้มอเตอร์กรงกระรอกธรรมดา
การควบคุมในแง่ของการสูญเสียมอเตอร์นั้นประหยัด
มีการควบคุมที่หลากหลายและราบรื่น
ความแข็งแกร่งของคุณสมบัติทางกลยังคงรักษาเสถียรภาพของตัวขับ
การเบรกแบบสร้างใหม่สามารถทำได้เกือบจนหยุดสนิท
ในเวลาเดียวกัน เป็นที่ทราบกันดีว่าความถี่ปัจจุบันของโรงไฟฟ้าของเรือรบนั้นคงที่และต้องใช้ตัวแปลงความถี่แยกต่างหากเพื่อควบคุมความเร็วของเครื่องยนต์
ไดรฟ์ไฟฟ้าที่ควบคุมด้วยความถี่ที่ทันสมัยประกอบด้วยมอเตอร์ไฟฟ้าแบบอะซิงโครนัสหรือซิงโครนัสและตัวแปลงความถี่ (รูปที่ 5.12)
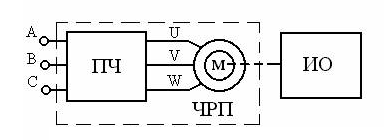
รูปที่ 5.12 ไดรฟ์ความถี่ตัวแปร
ตัวแปลงความถี่ขับเคลื่อนมอเตอร์ไฟฟ้าและเป็นอุปกรณ์ไฟฟ้าสถิตย์แบบอิเล็กทรอนิกส์ แรงดันไฟฟ้าที่มีแอมพลิจูดและความถี่แปรผันจะถูกสร้างขึ้นที่เอาต์พุตของคอนเวอร์เตอร์ ชื่อ "ไดรฟ์ไฟฟ้าความถี่ตัวแปร" เกิดจากการที่การควบคุมความเร็วมอเตอร์ดำเนินการโดยการเปลี่ยนความถี่ของแรงดันไฟฟ้าที่จ่ายให้กับมอเตอร์จากเครื่องแปลงความถี่
ในช่วงหลายปีที่ผ่านมา มีการเปิดตัวไดรฟ์ไฟฟ้าแบบควบคุมความถี่บนเรืออย่างแพร่หลายและประสบความสำเร็จ ทั้งสำหรับการแก้ปัญหาทางเทคโนโลยีต่างๆ และในระบบขับเคลื่อนด้วยไฟฟ้า สาเหตุหลักมาจากการพัฒนาและการสร้างตัวแปลงความถี่โดยใช้องค์ประกอบพื้นฐานใหม่ ซึ่งส่วนใหญ่ใช้ทรานซิสเตอร์สองขั้วเกทที่หุ้มฉนวน IGBT
ในมอเตอร์ไฟฟ้าแบบซิงโครนัส ความเร็วของโรเตอร์ในสภาวะคงตัวจะเท่ากับความเร็วของสนามแม่เหล็กของสเตเตอร์
ในมอเตอร์ไฟฟ้าแบบอะซิงโครนัส ความเร็วของโรเตอร์ในสถานะคงตัวจะแตกต่างจากความเร็วตามปริมาณการลื่น
ความถี่ของการหมุนของสนามแม่เหล็กขึ้นอยู่กับความถี่ของแรงดันไฟฟ้า เมื่อขดลวดสเตเตอร์ของมอเตอร์ไฟฟ้ามีแรงดันไฟฟ้าสามเฟสที่มีความถี่ สนามแม่เหล็กหมุนจะถูกสร้างขึ้น ความเร็วในการหมุนของฟิลด์นี้ถูกกำหนดโดยสูตรที่รู้จักกันดี
ที่ไหน คือจำนวนคู่ของเสาสเตเตอร์
การเปลี่ยนจากความเร็วการหมุนของสนามซึ่งวัดเป็นเรเดียนเป็นความถี่การหมุนซึ่งแสดงเป็นรอบต่อนาทีนั้นดำเนินการตามสูตรต่อไปนี้
โดยที่ 60 คือปัจจัยการแปลงมิติ
แทนที่ความเร็วการหมุนของสนามในสมการนี้ เราจะได้ว่า
ดังนั้นความเร็วของโรเตอร์ของมอเตอร์ซิงโครนัสและอะซิงโครนัสจึงขึ้นอยู่กับความถี่ของแรงดันไฟฟ้า
วิธีการควบคุมความถี่ขึ้นอยู่กับการพึ่งพานี้
โดยการเปลี่ยนความถี่ด้วยคอนเวอร์เตอร์ ที่ทางเข้าของมอเตอร์เราปรับความเร็วของโรเตอร์
ในไดรฟ์ที่ควบคุมความถี่โดยทั่วไปซึ่งใช้มอเตอร์กรงกระรอกแบบอะซิงโครนัสจะใช้การควบคุมความถี่แบบสเกลาร์และเวกเตอร์
ด้วยการควบคุมสเกลาร์ตามกฎหมายบางประการจะเปลี่ยนแอมพลิจูดและความถี่ของแรงดันไฟฟ้าที่ใช้กับมอเตอร์ การเปลี่ยนความถี่ของแรงดันไฟฟ้าทำให้เกิดการเบี่ยงเบนจากค่าที่คำนวณได้ของแรงบิดสูงสุดและเริ่มต้นของมอเตอร์ ประสิทธิภาพ ตัวประกอบกำลัง ดังนั้น เพื่อรักษาลักษณะการทำงานที่ต้องการของเครื่องยนต์ จึงจำเป็นต้องเปลี่ยนแอมพลิจูดของแรงดันไฟฟ้าพร้อมๆ กันด้วยการเปลี่ยนแปลงความถี่
ในตัวแปลงความถี่ที่มีอยู่ซึ่งมีการควบคุมสเกลาร์ อัตราส่วนของแรงบิดมอเตอร์สูงสุดต่อโมเมนต์ความต้านทานบนเพลามักจะคงที่ นั่นคือเมื่อความถี่เปลี่ยนแปลง แอมพลิจูดของแรงดันไฟฟ้าจะเปลี่ยนในลักษณะที่อัตราส่วนของแรงบิดสูงสุดของมอเตอร์ต่อแรงบิดของโหลดปัจจุบันยังคงไม่เปลี่ยนแปลง อัตราส่วนนี้เรียกว่าความจุเกินของมอเตอร์
ด้วยความจุโอเวอร์โหลดคงที่ ตัวประกอบกำลังและประสิทธิภาพที่กำหนด เครื่องยนต์ตลอดช่วงการควบคุมความเร็วแทบไม่เปลี่ยนแปลง
แรงบิดสูงสุดที่พัฒนาโดยเครื่องยนต์ถูกกำหนดโดยความสัมพันธ์ต่อไปนี้
โดยที่สัมประสิทธิ์คงที่
ดังนั้นการพึ่งพาแรงดันไฟฟ้าในความถี่จึงพิจารณาจากลักษณะของโหลดบนเพลาของมอเตอร์ไฟฟ้า
สำหรับแรงบิดโหลดคงที่ อัตราส่วน U/f = const จะคงอยู่ และตามจริงแล้ว แรงบิดสูงสุดของมอเตอร์จะคงที่ ลักษณะของการพึ่งพาแรงดันไฟฟ้าที่ความถี่สำหรับเคสที่มีแรงบิดโหลดคงที่แสดงในรูปที่ 5.13(ก) มุมเอียงของเส้นตรงบนกราฟขึ้นอยู่กับค่าของโมเมนต์ความต้านทานและแรงบิดสูงสุดของเครื่องยนต์
ในเวลาเดียวกัน ที่ความถี่ต่ำ เริ่มจากค่าความถี่หนึ่ง แรงบิดสูงสุดของมอเตอร์เริ่มลดลง เพื่อชดเชยสิ่งนี้และเพิ่มแรงบิดเริ่มต้น ระดับแรงดันไฟฟ้าของแหล่งจ่ายจะถูกใช้เพิ่มขึ้น
ในกรณีของโหลดของพัดลม การพึ่งพา U/f 2 = const จะเกิดขึ้น ลักษณะของการพึ่งพาแรงดันไฟฟ้าของความถี่สำหรับกรณีนี้แสดงในรูปที่ 5.13 (b)
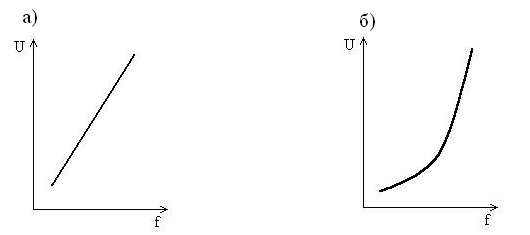
รูปที่ 5.13 ลักษณะการพึ่งพาแรงดันไฟฟ้าของความถี่ของเคส:
a) ด้วยโมเมนต์โหลดคงที่
b) ด้วยแรงบิดโหลดของพัดลม
เมื่อทำการควบคุมในพื้นที่ความถี่ต่ำ แรงบิดสูงสุดก็ลดลงเช่นกัน แต่สำหรับโหลดประเภทนี้ ไม่สำคัญ
การใช้แรงบิดสูงสุดขึ้นอยู่กับแรงดันและความถี่ เป็นไปได้ที่จะพล็อต U เทียบกับ f สำหรับโหลดประเภทใดก็ได้
ข้อได้เปรียบที่สำคัญของวิธีสเกลาร์คือความเป็นไปได้ของการควบคุมกลุ่มมอเตอร์ไฟฟ้าพร้อมกัน
การควบคุมสเกลาร์นั้นเพียงพอสำหรับการใช้งานในทางปฏิบัติส่วนใหญ่ของไดรฟ์ความถี่ตัวแปรที่มีช่วงการควบคุมความเร็วมอเตอร์สูงถึง 1:40
การควบคุมเวกเตอร์ช่วยให้คุณเพิ่มช่วงการควบคุม ควบคุมความแม่นยำ เพิ่มความเร็วของไดรฟ์ไฟฟ้าได้อย่างมาก วิธีนี้ให้การควบคุมแรงบิดของมอเตอร์โดยตรง
แรงบิดถูกกำหนดโดยกระแสสเตเตอร์ซึ่งสร้างสนามแม่เหล็กที่น่าตื่นเต้น ด้วยการควบคุมแรงบิดโดยตรง จำเป็นต้องเปลี่ยนนอกเหนือจากแอมพลิจูดและเฟสของกระแสสเตเตอร์นั่นคือเวกเตอร์ปัจจุบัน นี่คือเหตุผลของคำว่า "การควบคุมเวกเตอร์"
เพื่อควบคุมเวกเตอร์ปัจจุบัน และด้วยเหตุนี้ ตำแหน่งของฟลักซ์แม่เหล็กของสเตเตอร์ที่สัมพันธ์กับโรเตอร์ที่หมุนอยู่ จำเป็นต้องทราบตำแหน่งที่แน่นอนของโรเตอร์เมื่อใดก็ได้ ปัญหาได้รับการแก้ไขด้วยความช่วยเหลือของเซ็นเซอร์ตำแหน่งโรเตอร์ระยะไกลหรือโดยการกำหนดตำแหน่งของโรเตอร์โดยการคำนวณพารามิเตอร์เครื่องยนต์อื่น ๆ กระแสและแรงดันไฟฟ้าของขดลวดสเตเตอร์ใช้เป็นพารามิเตอร์เหล่านี้
ราคาถูกกว่าคือ VFD ที่มีการควบคุมเวกเตอร์โดยไม่มีเซ็นเซอร์ป้อนกลับความเร็ว แต่การควบคุมเวกเตอร์ต้องใช้การคำนวณจำนวนมากและความเร็วสูงจากตัวแปลงความถี่
นอกจากนี้ สำหรับการควบคุมแรงบิดโดยตรงที่ความเร็วต่ำหรือใกล้เคียงกับความเร็วการหมุนเป็นศูนย์ การทำงานของไดรฟ์ไฟฟ้าที่ควบคุมความถี่โดยไม่มีการตอบสนองความเร็วนั้นเป็นไปไม่ได้
การควบคุมเวกเตอร์ด้วยเซ็นเซอร์ป้อนกลับความเร็วให้ช่วงการควบคุมสูงถึง 1:1000 และสูงกว่า ความแม่นยำในการควบคุมความเร็ว - หนึ่งในร้อยเปอร์เซ็นต์ ความแม่นยำของแรงบิด - สองสามเปอร์เซ็นต์
ตัวแปลงความถี่เป็นอุปกรณ์ที่ออกแบบมาเพื่อแปลงกระแสสลับ (แรงดัน) ของความถี่หนึ่งเป็นกระแสสลับ (แรงดัน) ของความถี่อื่น
ความถี่เอาต์พุตในตัวแปลงที่ทันสมัยสามารถเปลี่ยนแปลงได้หลากหลายและทั้งสูงและต่ำกว่าความถี่ไฟหลัก
วงจรของตัวแปลงความถี่ใด ๆ ประกอบด้วยส่วนกำลังและส่วนควบคุม ส่วนกำลังของตัวแปลงมักจะทำกับไทริสเตอร์หรือทรานซิสเตอร์ที่ทำงานในโหมดสวิตช์อิเล็กทรอนิกส์ ส่วนควบคุมทำงานบนไมโครโปรเซสเซอร์แบบดิจิทัลและให้การควบคุมคีย์อิเล็กทรอนิกส์กำลัง ตลอดจนการแก้ไขงานเสริมจำนวนมาก (การควบคุม การวินิจฉัย การป้องกัน)
ตัวแปลงความถี่ที่ใช้ในไดรฟ์ไฟฟ้าควบคุมขึ้นอยู่กับโครงสร้างและหลักการทำงานของหน่วยพลังงานแบ่งออกเป็นสองประเภท:
1. ตัวแปลงความถี่พร้อมลิงค์ DC ระดับกลางที่เด่นชัด
2. ตัวแปลงความถี่พร้อมการเชื่อมต่อโดยตรง (ไม่มีลิงค์ DC ระดับกลาง)
คอนเวอร์เตอร์แต่ละคลาสที่มีอยู่มีข้อดีและข้อเสียซึ่งกำหนดขอบเขตของการใช้งานอย่างมีเหตุผลของแต่ละคอนเวอร์เตอร์
สำหรับคอนเวอร์เตอร์ที่มีการเชื่อมต่อโดยตรง (รูปที่ 5.14) ส่วนกำลังจะเป็นวงจรเรียงกระแสแบบควบคุมและสร้างขึ้นบนไทริสเตอร์ที่ไม่สามารถล็อคได้ ระบบควบคุมจะปลดล็อกกลุ่มของไทริสเตอร์และเชื่อมต่อขดลวดสเตเตอร์ของมอเตอร์กับแหล่งจ่ายไฟหลัก
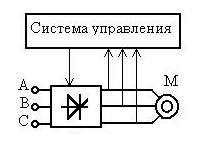
ข้าว. 5.14 ตัวแปลงความถี่พร้อมการเชื่อมต่อโดยตรง
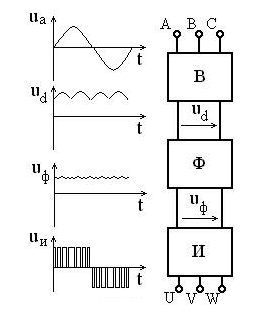
ดังนั้นแรงดันเอาต์พุตของคอนเวอร์เตอร์จึงเกิดขึ้นจากส่วน "ตัด" ของไซนัสอยด์ของแรงดันอินพุต รูปที่ 5.15 แสดงตัวอย่างการสร้างแรงดันไฟขาออกสำหรับเฟสโหลดอย่างใดอย่างหนึ่ง
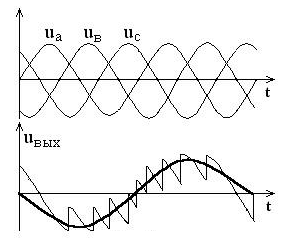
รูปที่ 5.15 การก่อตัวของแรงดันเอาต์พุตสำหรับเฟสหนึ่งของโหลด
แรงดันไฟฟ้าไซน์สามเฟส u a, u v, u s ทำหน้าที่ที่อินพุตของตัวแปลง แรงดันไฟขาออกที่ออกมามีรูปร่าง "ฟันเลื่อย" ที่ไม่ใช่ไซนัส ซึ่งสามารถประมาณแบบมีเงื่อนไขได้ด้วยไซนัส (เส้นหนา) จากรูปจะเห็นได้ว่าความถี่ของแรงดันไฟขาออกต้องไม่เท่ากับหรือสูงกว่าความถี่ของเครือข่ายอุปทาน อยู่ในช่วง 0 ถึง 30 Hz ส่งผลให้ควบคุมความเร็วรอบเครื่องยนต์ได้น้อย (ไม่เกิน 1: 10) ข้อจำกัดนี้ไม่อนุญาตให้ใช้ตัวแปลงดังกล่าวในไดรฟ์ที่ควบคุมความถี่ที่ทันสมัยพร้อมการควบคุมพารามิเตอร์ทางเทคโนโลยีที่หลากหลาย
การใช้ไทริสเตอร์ที่ไม่สามารถล็อคได้ต้องใช้ระบบควบคุมที่ค่อนข้างซับซ้อนซึ่งจะเป็นการเพิ่มต้นทุนของคอนเวอร์เตอร์
คลื่นไซน์ "ตัด" ที่เอาต์พุตของคอนเวอร์เตอร์เป็นแหล่งของฮาร์โมนิกที่สูงขึ้น ซึ่งทำให้เกิดการสูญเสียเพิ่มเติมในมอเตอร์ไฟฟ้า ความร้อนสูงเกินไปของเครื่องไฟฟ้า การลดแรงบิด และการรบกวนที่รุนแรงมากในเครือข่ายอุปทาน การใช้อุปกรณ์ชดเชยจะทำให้ต้นทุน น้ำหนัก ขนาด และประสิทธิภาพลดลง ระบบโดยรวม
นอกจากข้อบกพร่องที่ระบุไว้ของตัวแปลงแบบคู่ขนานแล้ว พวกมันยังมีข้อดีบางประการ ซึ่งรวมถึง:
ประสิทธิภาพสูงสุดในทางปฏิบัติเมื่อเทียบกับตัวแปลงอื่น ๆ (98.5% ขึ้นไป)
ความสามารถในการทำงานกับแรงดันไฟฟ้าและกระแสไฟสูง ซึ่งทำให้สามารถใช้งานได้ในไดรฟ์ไฟฟ้าแรงสูงอันทรงพลัง
ค่อนข้างถูกแม้จะมีต้นทุนที่แน่นอนเพิ่มขึ้นเนื่องจากวงจรควบคุมและอุปกรณ์เพิ่มเติม
วงจรคอนเวอร์เตอร์ที่คล้ายกันนี้ใช้ในไดรฟ์รุ่นเก่าและแทบไม่มีการพัฒนาการออกแบบใหม่เลย
ตัวแปลงความถี่ที่ใช้กันอย่างแพร่หลายในปัจจุบันคือตัวแปลงที่มีลิงก์ DC ที่เด่นชัด (รูปที่ 5.16)
ตัวแปลงของคลาสนี้ใช้การแปลงพลังงานไฟฟ้าเป็นสองเท่า: แรงดันไฟฟ้าไซน์อินพุทที่มีแอมพลิจูดและความถี่คงที่ได้รับการแก้ไขในวงจรเรียงกระแส (V) กรองโดยตัวกรอง (F) ทำให้เรียบแล้วแปลงใหม่โดยอินเวอร์เตอร์ (I) เป็นแรงดันไฟฟ้าสลับของความถี่ตัวแปรและแอมพลิจูด การแปลงพลังงานสองเท่าทำให้ประสิทธิภาพลดลง และการเสื่อมสภาพของตัวบ่งชี้น้ำหนักและขนาดที่เกี่ยวข้องกับคอนเวอร์เตอร์ที่มีการเชื่อมต่อโดยตรง
รูป 5.16 ตัวแปลงความถี่พร้อม DC link
ในการสร้างแรงดันไฟฟ้ากระแสสลับแบบไซน์ จะใช้อินเวอร์เตอร์แรงดันไฟอัตโนมัติและอินเวอร์เตอร์กระแสไฟอัตโนมัติ
ในฐานะที่เป็นสวิตช์อิเล็กทรอนิกส์ในอินเวอร์เตอร์ ไทริสเตอร์ที่ล็อคได้ GTO และการดัดแปลงขั้นสูงของ GCT, IGCT, SGCT และทรานซิสเตอร์สองขั้วเกทหุ้มฉนวน IGBT ถูกนำมาใช้
ข้อได้เปรียบหลักของตัวแปลงความถี่ไทริสเตอร์เช่นเดียวกับวงจรแบบคู่ขนานคือความสามารถในการทำงานกับกระแสและแรงดันไฟฟ้าสูง ในขณะที่ทนต่อโหลดต่อเนื่องและผลกระทบจากแรงกระตุ้น
มีประสิทธิภาพสูงขึ้น (สูงถึง 98%) เมื่อเทียบกับคอนเวอร์เตอร์บนทรานซิสเตอร์ IGBT (95 - 98%)
ตัวแปลงความถี่ที่ใช้ไทริสเตอร์ในปัจจุบันครอบครองตำแหน่งที่โดดเด่นในไดรฟ์ไฟฟ้าแรงสูงในช่วงกำลังตั้งแต่หลายร้อยกิโลวัตต์จนถึงหลายสิบเมกะวัตต์ที่มีแรงดันเอาต์พุต 3-10 kV และสูงกว่า อย่างไรก็ตาม ราคาต่อกิโลวัตต์ของกำลังขับสูงที่สุดในกลุ่มของตัวแปลงไฟฟ้าแรงสูง
จนกระทั่งเมื่อไม่นานมานี้ เครื่องแปลงความถี่บน GTO เป็นส่วนแบ่งหลักในไดรฟ์ความถี่ตัวแปรแรงดันต่ำ แต่ด้วยการถือกำเนิดของทรานซิสเตอร์ IGBT ทำให้เกิด "การคัดเลือกโดยธรรมชาติ" และในปัจจุบันตัวแปลงที่ยึดตามพวกมันนั้นเป็นผู้นำที่ได้รับการยอมรับโดยทั่วไปในด้านไดรฟ์ความถี่ตัวแปรแรงดันต่ำ
ไทริสเตอร์เป็นอุปกรณ์กึ่งควบคุม: ในการเปิดใช้งานก็เพียงพอที่จะใช้พัลส์สั้น ๆ กับเอาต์พุตควบคุม แต่หากต้องการปิดคุณต้องใช้แรงดันย้อนกลับกับมันหรือลดกระแสสวิตช์เป็นศูนย์ สิ่งนี้ต้องการระบบควบคุมที่ซับซ้อนและยุ่งยากในตัวแปลงความถี่ไทริสเตอร์
ทรานซิสเตอร์สองขั้วเกทฉนวน IGBT แตกต่างจากการควบคุมไทริสเตอร์เต็มรูปแบบ ระบบควบคุมพลังงานต่ำอย่างง่าย ความถี่การทำงานสูงสุด
ด้วยเหตุนี้ ตัวแปลงความถี่แบบ IGBT ทำให้สามารถขยายช่วงของการควบคุมความเร็วมอเตอร์และเพิ่มความเร็วของไดรฟ์โดยรวมได้
สำหรับไดรฟ์ควบคุมแบบอะซิงโครนัสเวกเตอร์ ตัวแปลง IGBT อนุญาตให้ทำงานที่ความเร็วต่ำโดยไม่มีเซ็นเซอร์ป้อนกลับ
การใช้ IGBT ที่มีความถี่สวิตชิ่งที่สูงขึ้นร่วมกับระบบควบคุมไมโครโปรเซสเซอร์ในตัวแปลงความถี่จะลดระดับของคุณลักษณะฮาร์มอนิกที่สูงขึ้นของตัวแปลงไทริสเตอร์ เป็นผลให้มีการสูญเสียเพิ่มเติมน้อยลงในขดลวดและวงจรแม่เหล็กของมอเตอร์ไฟฟ้า, ความร้อนที่ลดลงของเครื่องไฟฟ้า, แรงบิดกระเพื่อมลดลงและการยกเว้นของที่เรียกว่า "การเดิน" ของโรเตอร์ ในเขตความถี่ต่ำ การสูญเสียในหม้อแปลง, ธนาคารตัวเก็บประจุจะลดลง, อายุการใช้งานและฉนวนลวดเพิ่มขึ้น, จำนวนสัญญาณเตือนที่ผิดพลาดของอุปกรณ์ป้องกันและข้อผิดพลาดของเครื่องมือวัดการเหนี่ยวนำจะลดลง
คอนเวอร์เตอร์ที่ใช้ทรานซิสเตอร์ IGBT เมื่อเปรียบเทียบกับคอนเวอร์เตอร์ไทริสเตอร์ที่มีกำลังขับเท่ากันนั้นมีขนาดเล็กกว่า น้ำหนัก ความน่าเชื่อถือเพิ่มขึ้นเนื่องจากการออกแบบโมดูลาร์ของสวิตช์อิเล็กทรอนิกส์ การระบายความร้อนที่ดีขึ้นจากพื้นผิวโมดูล และองค์ประกอบโครงสร้างน้อยลง
ซึ่งช่วยให้คุณใช้การป้องกันไฟกระชากและแรงดันไฟเกินได้อย่างสมบูรณ์ยิ่งขึ้น ซึ่งช่วยลดโอกาสที่ไดรฟ์จะล้มเหลวและเกิดความเสียหายได้อย่างมาก
ในขณะนี้ ตัวแปลง IGBT แรงดันต่ำมีราคาต่อหน่วยของกำลังขับที่สูงขึ้น เนื่องจากความซับซ้อนสัมพัทธ์ของการผลิตโมดูลทรานซิสเตอร์ อย่างไรก็ตาม ในแง่ของอัตราส่วนราคา/คุณภาพ ตามข้อดีที่ระบุไว้ พวกมันมีประสิทธิภาพเหนือกว่าตัวแปลงไทริสเตอร์อย่างชัดเจน นอกจากนี้ ในช่วงหลายปีที่ผ่านมา ราคาโมดูล IGBT ลดลงอย่างต่อเนื่อง
อุปสรรคหลักในการใช้งานไดรฟ์แปลงความถี่ตรงแรงดันสูงและกำลังที่สูงกว่า 1-2 เมกะวัตต์คือข้อจำกัดทางเทคโนโลยีในปัจจุบัน การเพิ่มขึ้นของแรงดันไฟสวิตชิ่งและกระแสไฟในการทำงานทำให้ขนาดของโมดูลทรานซิสเตอร์เพิ่มขึ้น และยังต้องการการกำจัดความร้อนที่มีประสิทธิภาพมากขึ้นจากคริสตัลซิลิคอน
เทคโนโลยีใหม่สำหรับการผลิตทรานซิสเตอร์แบบไบโพลาร์มีจุดมุ่งหมายเพื่อเอาชนะข้อจำกัดเหล่านี้ และสัญญาในการใช้ IGBT ก็สูงมากเช่นกันในไดรฟ์ไฟฟ้าแรงสูง ปัจจุบันทรานซิสเตอร์ IGBT ใช้ในคอนเวอร์เตอร์ไฟฟ้าแรงสูงในรูปแบบของโมดูลเดี่ยวหลายโมดูลที่เชื่อมต่อแบบอนุกรม
แผนภาพทั่วไปของตัวแปลงความถี่ IGBT แรงดันต่ำแสดงในรูปที่ 5.17 ที่ด้านล่างของรูปคือกราฟของแรงดันและกระแสที่เอาต์พุตของแต่ละองค์ประกอบของคอนเวอร์เตอร์
แรงดันไฟฟ้าสลับของเครือข่ายอุปทาน (u in) ที่มีแอมพลิจูดและความถี่คงที่ (U ใน = const, f ใน = const) ถูกป้อนไปยังวงจรเรียงกระแสแบบควบคุมหรือไม่มีการควบคุม (1)
ตัวกรอง (2) ใช้เพื่อปรับระลอกคลื่นของแรงดันไฟฟ้าที่แก้ไขให้เรียบ (u rect.) วงจรเรียงกระแสและตัวกรองตัวเก็บประจุ (2) สร้างลิงก์ DC
จากเอาต์พุตของตัวกรอง แรงดันคงที่ u d จะถูกป้อนไปยังอินพุตของอินเวอร์เตอร์พัลส์อิสระ (3)
อินเวอร์เตอร์อัตโนมัติของตัวแปลงแรงดันต่ำที่ทันสมัยตามที่ระบุไว้นั้นใช้ทรานซิสเตอร์แบบไบโพลาร์แบบกำลังไฟฟ้าที่มีเกท IGBT ที่หุ้มฉนวน รูปที่เป็นปัญหาแสดงวงจรแปลงความถี่ที่มีอินเวอร์เตอร์แรงดันไฟอัตโนมัติซึ่งใช้กันอย่างแพร่หลายมากที่สุด
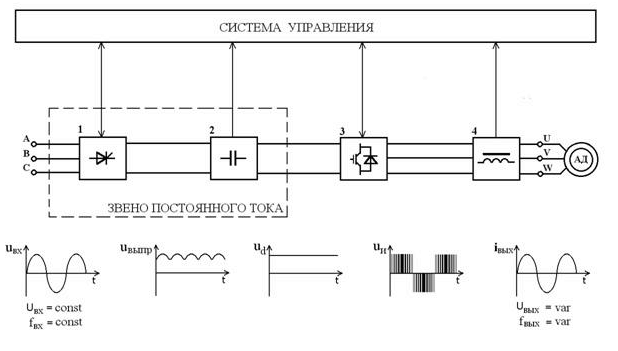
ข้าว. 5.17 วงจรแปลงความถี่ IGBT ทั่วไป
อินเวอร์เตอร์แปลงแรงดันไฟฟ้ากระแสตรง ยู d เป็นแรงดันอิมพัลส์สามเฟส (หรือเฟสเดียว) u และแอมพลิจูดและความถี่แปรผัน ตามสัญญาณของระบบควบคุม ขดลวดแต่ละอันของมอเตอร์ไฟฟ้าเชื่อมต่อผ่านทรานซิสเตอร์กำลังไฟฟ้าที่สอดคล้องกันของอินเวอร์เตอร์กับขั้วบวกและขั้วลบของลิงค์ DC ระยะเวลาของการเชื่อมต่อของขดลวดแต่ละอันภายในระยะเวลาการทำซ้ำของพัลส์จะถูกปรับตามกฎไซน์ ความกว้างพัลส์ที่ใหญ่ที่สุดมีให้ในช่วงกลางของครึ่งรอบ และลดลงในช่วงเริ่มต้นและสิ้นสุดของครึ่งรอบ ดังนั้นระบบควบคุมจึงให้การมอดูเลตความกว้างพัลส์ (PWM) ของแรงดันไฟฟ้าที่ใช้กับขดลวดของมอเตอร์ แอมพลิจูดและความถี่ของแรงดันไฟฟ้าถูกกำหนดโดยพารามิเตอร์ของฟังก์ชันมอดูเลตไซน์
ที่ความถี่พาหะของ PWM สูง (2 ... 15 kHz) ขดลวดมอเตอร์ทำหน้าที่เป็นตัวกรองเนื่องจากการเหนี่ยวนำสูง ดังนั้นกระแสไซนัสเกือบทั้งหมดจึงไหลเข้ามา
ในวงจรของคอนเวอร์เตอร์ที่มีวงจรเรียงกระแสควบคุม (1) การเปลี่ยนแปลงของแอมพลิจูดแรงดัน ยูและสามารถทำได้โดยการควบคุมขนาดของแรงดันคงที่ ยู d และการเปลี่ยนแปลงความถี่เป็นโหมดการทำงานของอินเวอร์เตอร์
หากจำเป็น จะมีการติดตั้งตัวกรอง (4) ที่เอาต์พุตของอินเวอร์เตอร์อัตโนมัติเพื่อให้คลื่นกระแสน้ำไหลออกเรียบ (ในวงจรตัวแปลง IGBT เนื่องจากฮาร์โมนิกในระดับต่ำในแรงดันเอาต์พุต แทบไม่จำเป็นต้องมีตัวกรอง)
ดังนั้นแรงดันไฟฟ้าสลับสามเฟส (หรือเฟสเดียว) ของความถี่ตัวแปรและแอมพลิจูดจึงเกิดขึ้นที่เอาต์พุตของตัวแปลงความถี่ (U out = var, f out = var)
ความยาวและระยะทาง มวล การวัดปริมาตรของผลิตภัณฑ์จำนวนมากและอาหาร พื้นที่ ปริมาณและหน่วยของการวัดในสูตรการทำอาหาร อุณหภูมิ ความดัน ความเครียดทางกล โมดูลัสของ Young พลังงานและการทำงาน พลังงาน เวลา แรง ความเร็วเชิงเส้น ความเร็ว มุมแบน ประสิทธิภาพเชิงความร้อนและประสิทธิภาพเชื้อเพลิง ตัวเลข หน่วยของการวัด ปริมาณของข้อมูล อัตราแลกเปลี่ยน ขนาด เสื้อผ้าและรองเท้าของผู้หญิง ขนาดของเสื้อผ้าและรองเท้าของผู้ชาย ความเร็วเชิงมุมและความเร็วในการหมุน การเร่ง ความเร่งเชิงมุม ความหนาแน่น ปริมาตรจำเพาะ โมเมนต์ของความเฉื่อย โมเมนต์ของแรง แรงบิด ค่าความร้อนจำเพาะ (โดยมวล) ความหนาแน่นของพลังงานและค่าความร้อนจำเพาะของเชื้อเพลิง ( โดยปริมาตร) ความแตกต่างของอุณหภูมิ ค่าสัมประสิทธิ์การขยายตัวทางความร้อน ความต้านทานความร้อน การนำความร้อน ความจุความร้อนจำเพาะ การเปิดรับพลังงาน พลังงานรังสีความร้อน ความหนาแน่นของฟลักซ์ความร้อน ค่าสัมประสิทธิ์การถ่ายเทความร้อน การไหลของปริมาตร การไหลของมวล การไหลของโมลาร์ ความหนาแน่นของการไหลของมวล ความเข้มข้นของโมลาร์ มวล k ความเข้มข้นในสารละลาย ความหนืดไดนามิก (สัมบูรณ์) ความหนืดจลน์ แรงตึงผิว การซึมผ่านของไอน้ำ การซึมผ่านของไอ อัตราการถ่ายโอนไอ ระดับเสียง ความไวของไมโครโฟน ระดับความดันเสียง (SPL) ความสว่าง ความเข้มของแสง การส่องสว่าง ความละเอียดในคอมพิวเตอร์กราฟิก ความถี่และความยาวคลื่น พลังงานแสงในไดออปเตอร์และความยาวโฟกัส ออปติคัล กำลังในไดออปเตอร์และกำลังขยายของเลนส์ (×) ประจุไฟฟ้า ความหนาแน่นของประจุเชิงเส้น ความหนาแน่นของประจุไฟฟ้า ความหนาแน่นของประจุจำนวนมาก กระแสไฟฟ้า ความหนาแน่นกระแสเชิงเส้น ความหนาแน่นกระแสพื้นผิว ความเข้มของสนามไฟฟ้า ความแรงของสนามไฟฟ้า ศักย์ไฟฟ้าและแรงดันไฟ เป็น dBm (dBm หรือ dBmW), dBV (dBV), วัตต์ ฯลฯ หน่วย แรงแม่เหล็ก ความแรงของสนามแม่เหล็ก ความแรงของสนามแม่เหล็ก ตกลง การเหนี่ยวนำแม่เหล็ก อัตราการดูดซึมของรังสีไอออไนซ์ กัมมันตภาพรังสี การสลายตัวของกัมมันตภาพรังสี ปริมาณรังสีที่ได้รับ ปริมาณดูดซับ คำนำหน้าทศนิยม การส่งข้อมูล การพิมพ์และการประมวลผลภาพ หน่วยปริมาตรไม้ การคำนวณมวลโมลาร์ ระบบธาตุเคมีของ D. I. Mendeleev เป็นระยะ
1 รอบต่อนาที [rpm] = 6.00000000000002 องศาต่อวินาที [°/s]
ค่าเริ่มต้น
มูลค่าแปลง
เรเดียนต่อวินาที เรเดียนต่อวัน เรเดียนต่อชั่วโมง เรเดียนต่อนาที องศาต่อวัน องศาต่อชั่วโมง องศาต่อนาที องศาต่อวินาที รอบต่อวัน รอบต่อนาที รอบต่อนาที รอบต่อนาที รอบต่อนาที รอบต่อปี รอบต่อเดือน รอบต่อสัปดาห์ องศาต่อปี องศาต่อ องศาเดือนต่อสัปดาห์ เรเดียนต่อปี เรเดียนต่อเดือน เรเดียนต่อสัปดาห์
เพิ่มเติมเกี่ยวกับความเร็วเชิงมุม

ข้อมูลทั่วไป
ความเร็วเชิงมุมเป็นปริมาณเวกเตอร์ที่กำหนดความเร็วของการหมุนของวัตถุที่สัมพันธ์กับแกนของการหมุน เวกเตอร์นี้ตั้งฉากกับระนาบการหมุนและกำหนดโดยใช้กฎวงแหวน ความเร็วเชิงมุมวัดเป็นอัตราส่วนระหว่างมุมที่วัตถุเคลื่อนที่ กล่าวคือ การกระจัดเชิงมุม และเวลาที่ใช้ไป ในระบบ SI ความเร่งเชิงมุมวัดเป็นเรเดียนต่อวินาที
ความเร็วเชิงมุมในกีฬา
ความเร็วเชิงมุมมักใช้ในการเล่นกีฬา ตัวอย่างเช่น นักกีฬาลดหรือเพิ่มความเร็วเชิงมุมของไม้กอล์ฟ ไม้ตี หรือแร็กเก็ตเพื่อปรับปรุงประสิทธิภาพ ความเร็วเชิงมุมสัมพันธ์กับความเร็วเชิงเส้น ดังนั้นจุดทั้งหมดบนเซกเมนต์ที่หมุนรอบจุดบนส่วนนี้ นั่นคือ รอบจุดศูนย์กลางของการหมุน จุดที่ไกลที่สุดจากจุดศูนย์กลางนี้จะเคลื่อนที่ด้วยความเร็วเชิงเส้นสูงสุด ตัวอย่างเช่น หากไม้กอล์ฟกำลังหมุน ส่วนปลายของไม้นั้นที่อยู่ห่างจากศูนย์กลางการหมุนมากที่สุดจะเคลื่อนที่ด้วยความเร็วเชิงเส้นสูงสุด ในเวลาเดียวกัน จุดทั้งหมดในส่วนนี้เคลื่อนที่ด้วยความเร็วเชิงมุมเท่ากัน ดังนั้น โดยการยืดไม้กอล์ฟ ไม้ตี หรือแร็กเกต นักกีฬายังเพิ่มความเร็วเชิงเส้น และตามด้วยความเร็วของการกระแทก ที่ส่งไปยังลูกบอล เพื่อให้สามารถบินได้ไกลขึ้น การย่อแร็กเกตหรือไม้กอล์ฟให้สั้นลง ในทางกลับกัน การสกัดกั้นได้ต่ำกว่าปกติ จะทำให้ความเร็วของการกระแทกช้าลง


คนสูงที่มีแขนขายาวมีความได้เปรียบในแง่ของความเร็วเชิงเส้น นั่นคือการขยับขาด้วยความเร็วเชิงมุมเท่ากัน พวกมันจะขยับเท้าด้วยความเร็วเชิงเส้นที่สูงขึ้น สิ่งเดียวกันเกิดขึ้นด้วยมือของพวกเขา ข้อได้เปรียบนี้อาจเป็นหนึ่งในเหตุผลที่ ผู้ชายล่าสัตว์มากกว่าผู้หญิงในสังคมดึกดำบรรพ์ มีแนวโน้มว่าด้วยเหตุนี้ คนตัวสูงจึงได้รับประโยชน์ในกระบวนการวิวัฒนาการเช่นกัน แขนขายาวไม่เพียงช่วยในการวิ่งเท่านั้น แต่ยังช่วยในระหว่างการล่าสัตว์ด้วย - แขนยาวขว้างหอกและก้อนหินด้วยความเร็วเชิงเส้นที่มากขึ้น ในทางกลับกัน แขนยาวและขาอาจทำให้ไม่สะดวก แขนขาที่ยาวรับน้ำหนักได้มากกว่าและต้องการพลังงานเพิ่มเติมในการเคลื่อนย้าย นอกจากนี้ เมื่อคนวิ่งเร็ว ขายาวจะเคลื่อนที่เร็วขึ้น ซึ่งหมายความว่าเมื่อชนกับสิ่งกีดขวาง แรงกระแทกจะแรงกว่าคนขาสั้นที่เคลื่อนที่ด้วยความเร็วเชิงเส้นเท่ากัน
ยิมนาสติก สเก็ตลีลา และดำน้ำก็ใช้ความเร็วเชิงมุมเช่นกัน หากนักกีฬารู้ความเร็วเชิงมุม ก็จะง่ายต่อการคำนวณจำนวนการพลิกตัวและการแสดงผาดโผนอื่นๆ ในระหว่างการกระโดด ในระหว่างการตีลังกา นักกีฬามักจะดึงขาและแขนให้ชิดกับลำตัวมากที่สุดเพื่อลดแรงเฉื่อยและเพิ่มอัตราเร่ง และทำให้ความเร็วเชิงมุมลดลง ในทางกลับกัน ขณะดำน้ำหรือร่อนลง ผู้ตัดสินจะดูว่านักกีฬาลงตรงหรือไม่ ที่ความเร็วสูง ควบคุมทิศทางการบินได้ยาก ดังนั้นนักกีฬาจงใจลดความเร็วเชิงมุมโดยเหยียดแขนและขาออกจากร่างกายเล็กน้อย
นักกีฬาที่ขว้างจักรหรือค้อนก็ควบคุมความเร็วเชิงเส้นด้วยความช่วยเหลือของมุม หากคุณเพียงแค่ขว้างค้อนโดยไม่หมุนเป็นวงกลมบนลวดเหล็กยาวที่เพิ่มความเร็วเชิงเส้น การขว้างจะไม่แรงมาก ดังนั้นค้อนจะหมุนก่อน นักกีฬาโอลิมปิกหมุนรอบแกนของพวกเขาสามถึงสี่ครั้งเพื่อเพิ่มความเร็วเชิงมุมให้สูงสุด
ความเร็วเชิงมุมและการจัดเก็บข้อมูลบนสื่อออปติคัล

เมื่อข้อมูลถูกเขียนลงสื่อออปติคัล เช่น คอมแพคดิสก์ (CD) ไดรฟ์ยังใช้ความเร็วเชิงมุมและเชิงเส้นเพื่อวัดความเร็วในการเขียนและอ่านข้อมูล มีหลายวิธีในการบันทึกข้อมูล ซึ่งในระหว่างนั้นจะใช้ความเร็วเชิงเส้นหรือเชิงมุมที่แปรผันหรือคงที่ ตัวอย่างเช่น โหมด ความเร็วเชิงเส้นคงที่(เป็นภาษาอังกฤษ - Constant Linear Velocity หรือ CVL) - หนึ่งในวิธีการหลักในการบันทึกดิสก์ ซึ่งข้อมูลจะถูกเขียนด้วยความเร็วเท่ากันทั่วทั้งพื้นผิวของแผ่นดิสก์ ระหว่างการบันทึกใน ความเร็วเชิงเส้นคงที่เป็นโซน(ในภาษาอังกฤษ - Zone Constant Linear Velocity หรือ ZCLV) ความเร็วคงที่จะถูกรักษาไว้ในระหว่างการบันทึกในบางส่วนนั่นคือโซนของดิสก์ ในกรณีนี้ แผ่นดิสก์จะช้าลงขณะบันทึกที่โซนด้านนอก โหมด ความเร็วเชิงมุมคงตัวบางส่วน(ความเร็วเชิงมุมบางส่วนคงที่หรือ PCAV) ช่วยให้คุณสามารถบันทึกด้วยความเร็วเชิงมุมที่เพิ่มขึ้นทีละน้อยจนกว่าจะถึงเกณฑ์ที่กำหนด หลังจากนั้นความเร็วเชิงมุมจะคงที่ โหมดบันทึกล่าสุด - โหมด ความเร็วเชิงมุมคงที่(ความเร็วเชิงมุมคงที่หรือ CAV) ในโหมดนี้ ระหว่างการบันทึก ความเร็วเชิงมุมเท่าเดิมจะคงอยู่เหนือพื้นผิวทั้งหมดของแผ่นดิสก์ ในกรณีนี้ ความเร็วเชิงเส้นจะเพิ่มขึ้นเมื่อหัวบันทึกเคลื่อนไปข้างหน้าเรื่อยๆ จนถึงขอบของแผ่นดิสก์ โหมดนี้ยังใช้เมื่อบันทึกบันทึกและฮาร์ดไดรฟ์ของคอมพิวเตอร์
ความเร็วเชิงมุมในอวกาศ
ที่ระยะทาง 35,786 กิโลเมตร (22,236 ไมล์) จากโลก มีวงโคจรที่ดาวเทียมหมุนอยู่ นี่เป็นวงโคจรพิเศษเนื่องจากวัตถุโคจรไปในทิศทางเดียวกับที่โลกโคจรรอบแกนทั้งหมดในเวลาเดียวกับที่โลกใช้ทำให้วงกลมเต็มรอบแกนของมัน นี่น้อยกว่า 24 ชั่วโมงเล็กน้อย นั่นคือวันดาวฤกษ์หนึ่งวัน เนื่องจากความเร็วเชิงมุมของการหมุนของวัตถุในวงโคจรนี้เท่ากับความเร็วเชิงมุมของการหมุนของโลก ดูเหมือนว่าผู้สังเกตการณ์จากโลกจะไม่เคลื่อนที่ วงโคจรดังกล่าวเรียกว่า ค้างฟ้า.
วงโคจรนี้มักจะเปิดตัวโดยดาวเทียมที่ติดตามการเปลี่ยนแปลงของสภาพอากาศ (ดาวเทียมอุตุนิยมวิทยา) ดาวเทียมที่ตรวจสอบการเปลี่ยนแปลงในมหาสมุทร และดาวเทียมสื่อสารที่ให้บริการออกอากาศทางโทรทัศน์และวิทยุ การสื่อสารทางโทรศัพท์ และอินเทอร์เน็ตผ่านดาวเทียม วงโคจร geostationary มักใช้สำหรับดาวเทียมเพราะเสาอากาศที่เคยชี้ไปที่ดาวเทียมไม่จำเป็นต้องชี้อีก ในทางกลับกัน ความไม่สะดวกดังกล่าวเกี่ยวข้องกับการใช้งาน เช่น จำเป็นต้องมีมุมมองโดยตรงระหว่างเสาอากาศกับดาวเทียม นอกจากนี้ วงโคจรของ geostationary นั้นอยู่ไกลจากโลก และจำเป็นต้องใช้เครื่องส่งที่ทรงพลังกว่าในการส่งสัญญาณมากกว่าที่ใช้ในการส่งสัญญาณจากวงโคจรที่ต่ำกว่า สัญญาณมาถึงด้วยความล่าช้าประมาณ 0.25 วินาทีซึ่งผู้ใช้จะสังเกตเห็นได้ชัดเจน ตัวอย่างเช่น ในระหว่างการออกอากาศข่าว ผู้สื่อข่าวในพื้นที่ห่างไกลมักจะติดต่อสตูดิโอผ่านลิงก์ดาวเทียม ในเวลาเดียวกัน เป็นที่สังเกตได้ว่าเมื่อผู้นำเสนอทีวีถามคำถามพวกเขาจะตอบด้วยความล่าช้า อย่างไรก็ตามเรื่องนี้ ดาวเทียมในวงโคจรค้างฟ้ายังถูกใช้อย่างแพร่หลาย ตัวอย่างเช่น จนกระทั่งเมื่อไม่นานมานี้ การสื่อสารระหว่างทวีปต่างๆ ได้ดำเนินการโดยใช้ดาวเทียมเป็นหลัก ตอนนี้ได้ถูกแทนที่ด้วยสายเคเบิลข้ามทวีปที่วิ่งไปตามพื้นมหาสมุทรเป็นส่วนใหญ่ อย่างไรก็ตาม การสื่อสารผ่านดาวเทียมยังคงใช้ในพื้นที่ห่างไกล ในช่วงยี่สิบปีที่ผ่านมา ดาวเทียมสื่อสารได้ให้การเข้าถึงอินเทอร์เน็ตด้วย โดยเฉพาะอย่างยิ่งในพื้นที่ห่างไกลที่ไม่มีโครงสร้างพื้นฐานด้านการสื่อสารภาคพื้นดิน

อายุการใช้งานของดาวเทียมส่วนใหญ่จะพิจารณาจากปริมาณเชื้อเพลิงบนเครื่องบินที่จำเป็นสำหรับการแก้ไขวงโคจรเป็นระยะ ปริมาณเชื้อเพลิงในดาวเทียมมีจำกัด ดังนั้นเมื่อน้ำมันหมด ดาวเทียมจะถูกปลดประจำการ ส่วนใหญ่มักจะถูกย้ายไปยังวงโคจรของสุสานนั่นคือวงโคจรที่สูงกว่า geostationary มาก นี่เป็นกระบวนการที่มีราคาแพง อย่างไรก็ตาม หากปล่อยดาวเทียมที่ไม่จำเป็นไว้ในวงโคจร geostationary สิ่งนี้คุกคามความเป็นไปได้ที่จะชนกับดาวเทียมดวงอื่น พื้นที่ในวงโคจร geostationary มีจำกัด ดังนั้นดาวเทียมเก่าที่เหลืออยู่ในวงโคจรจะใช้พื้นที่ที่ดาวเทียมใหม่สามารถใช้ได้ ในเรื่องนี้ ในหลายประเทศมีกฎระเบียบที่กำหนดให้เจ้าของดาวเทียมต้องลงนามในข้อตกลงว่าเมื่อสิ้นสุดการทำงาน ดาวเทียมจะถูกวางลงในวงโคจรของสุสาน
บทความตัวแปลงหน่วยได้รับการแก้ไขและแสดงโดย Anatoly Zolotkov
คุณพบว่าการแปลหน่วยการวัดจากภาษาหนึ่งเป็นอีกภาษาหนึ่งเป็นเรื่องยากหรือไม่ เพื่อนร่วมงานพร้อมที่จะช่วยเหลือคุณ โพสต์คำถามไปที่ TCTermsและภายในไม่กี่นาทีคุณจะได้รับคำตอบ
การคำนวณสำหรับการแปลงหน่วยในตัวแปลง " ความเร็วเชิงมุมและความเร็วในการหมุน' ดำเนินการโดยใช้ฟังก์ชันของ unitconversion.org