มอเตอร์ไฟฟ้า กระแสตรงอาจมีการกระตุ้นแบบอิสระ แบบขนาน แบบอนุกรมหรือแบบผสม (รูปที่ 6.1)
ข้าว. 6.1. วงจรมอเตอร์กระแสตรงอิสระ ( เอ),
ขนาน ( ข) ตามลำดับ ( ใน) และผสม ( จี) การกระตุ้น
(ส่วนบนของโครงการ "c" เป็นของโครงการ "a")
ในมอเตอร์กระตุ้นแบบขนาน ขดลวดสนามจะเชื่อมต่อแบบขนานกับขั้วต่อกระดอง แต่กระแสที่ไหลผ่านขดลวดนี้ไม่เหมือนกับกระแสกระดองไม่ขึ้นอยู่กับโหลดและถูกกำหนดโดยแรงดันไฟฟ้าที่ใช้กับกระดองและความต้านทานรวมของวงจรกระตุ้น ด้วยเหตุนี้มอเตอร์ที่ตื่นเต้นแบบแบ่งจึงเรียกว่ามอเตอร์ที่ตื่นเต้นแบบอิสระ
แรงบิด เอ็มมอเตอร์กระแสตรงและ EMF อีถูกกำหนดโดยสูตร
เอ็ม= ถึง F ฉันฉัน; อี= kFω,
โดยที่ k คือสัมประสิทธิ์การออกแบบของเครื่องยนต์
Ф – ฟลักซ์แม่เหล็ก, Wb;
ฉันผม - กระแสเกราะ A.
ω คือความเร็วเชิงมุม rad/s
สมการเครื่องกลไฟฟ้า ω = ƒ ( ฉันผม) และกลไก ω = ƒ ( เอ็ม) มีลักษณะเป็นรูป
ω = ยู/(kF) – ( Rฉัน + Rพี) / (k F) ฉันฉัน;
ω = ยู/(kF) – ( Rฉัน + R p) / (ถึง 2 F 2) เอ็ม.
ความเร็วเชิงมุมของรอบเดินเบาในอุดมคติ (at ฉันผม = 0 หรือ เอ็ม = 0)
ω 0 = ยู/(kF).
ในรูป 6.2 แสดงลักษณะทางกลของมอเตอร์กระแสตรงที่มีการกระตุ้นอิสระ (DPT NV) ในทุกโหมดการทำงาน จุดลักษณะของคุณลักษณะในโหมดมอเตอร์คือ: จุดรอบเดินเบาในอุดมคติ (ω 0 0 เอ็ม= 0); จุดโหมดเล็กน้อย (ω n, เอ็ม n); จุด ไฟฟ้าลัดวงจร (ω = 0, เอ็ม = เอ็มถึง).
ความแข็งแกร่งของลักษณะทางกลถูกกำหนดโดยฟลักซ์กระตุ้นและความต้านทานของวงจรสมอ:
β = d เอ็ม/dω = - ถึง 2 Ф 2 / ( Rฉัน + Rพี) = - เอ็มถึง / ω.
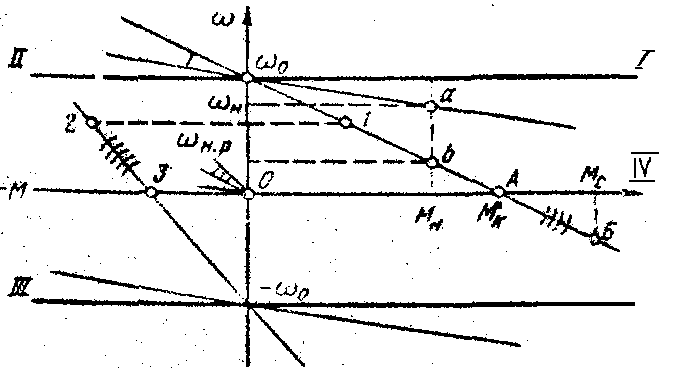
ข้าว. 6.2. ลักษณะทางกลแบบผสมผสานของมอเตอร์กระแสตรงที่มีแรงกระตุ้นอิสระ
ค่าสูงสุดของโมดูลัสความแข็งสอดคล้องกับลักษณะทางกลตามธรรมชาติ เนื่องจากกระแสกระตุ้นเท่ากับกระแสที่กำหนดและความต้านทานการควบคุม R p \u003d 0 เมื่อความต้านทานของลิโน่เพิ่มขึ้น R p ความชันของคุณสมบัติทางกลเพิ่มขึ้น และความเร็วเชิงมุมลดลง สำหรับค่าความต้านทานที่กำหนด Rพีและ พิกัดแรงบิด เอ็ม n ความเร็วเชิงมุมของเครื่องยนต์
ω n.r = ω 0 (1 – ฉันน ( Rฉัน + Rร) / ยูน.
ในการคำนวณลักษณะทางกล จำเป็นต้องทราบความต้านทานของกระดองของมอเตอร์ R i ซึ่งระบุไว้ในไดเร็กทอรี ในกรณีที่ไม่มีข้อมูลโรงงาน ค่า Rหาได้ประมาณตามสูตร
Rผม \u003d 0.5 (1 - ŋ n) ( ยูไม่มี ฉันน)
เนื่องจากลักษณะทางกลของ DPT NV นั้นตรงไปตรงมา จึงเพียงพอแล้วที่จะมีจุดสองจุดในการวาด:
1) ω = ω 0 และ เอ็ม = 0,
2) ω = ω n (หรือ ω = ω n.r) และ เอ็ม = เอ็มน.
สำหรับ DPT NV สามารถเบรกด้วยไฟฟ้าได้สามโหมดต่อไปนี้
1. เบรกแบบสร้างใหม่ซึ่งเกิดขึ้นเมื่อความเร็วของเครื่องยนต์สูงกว่าความเร็วรอบเดินเบาในอุดมคติ ประหยัดที่สุดเนื่องจากพลังงานเบรกถูกถ่ายโอนไปยังเครือข่ายไฟฟ้า ลักษณะทางกลในโหมดนี้เป็นความต่อเนื่องของคุณลักษณะที่สอดคล้องกันของโหมดมอเตอร์ในจตุภาค II วงจรมอเตอร์ไม่เปลี่ยนแปลงระหว่างการเบรกแบบสร้างใหม่
2. การเบรกแบบไดนามิก. กระดองมอเตอร์ถูกตัดการเชื่อมต่อจากเครือข่ายและลัดวงจรเป็นความต้านทาน ในกรณีนี้ พลังงานกลของชิ้นส่วนที่เคลื่อนไหว (กลไกและเกราะของมอเตอร์) จะถูกแปลงเป็นพลังงานไฟฟ้าซึ่งสูญเสียไปในรูปของพลังงานความร้อนในความต้านทานของวงจรสมอ ลักษณะทางกลในโหมดเบรกนี้ผ่านจุดเริ่มต้น (ในรูปที่ 6.2 - เส้นที่มีสามรอยบาก)
3. เบรกถอยหลังดำเนินการในสองวิธี:
1) การแนะนำของความต้านทานสูงในวงจรกระดองในกรณีนี้ แรงบิดของมอเตอร์จะน้อยกว่าแรงบิดโหลดแบบสถิต เอ็มกับ. เครื่องยนต์ดับ (ที่จุด A) จากนั้นอยู่ภายใต้อิทธิพลของแรงบิด เอ็ม c เริ่มหมุนไปในทิศทางอื่นทำให้เกิดแรงบิดในการเบรก ที่จุด B จะเกิดสภาวะคงตัว ลักษณะทางกลคือความต่อเนื่องของคุณสมบัติที่สอดคล้องกันของโหมดมอเตอร์ (ในรูปที่ 6.2 - เส้นที่มีสี่เซอริฟ)
2) เบรกโดยการเปลี่ยนขั้วของกระดองที่คดเคี้ยวไปพร้อมกัน. เครื่องยนต์ทำงานที่จุด 1 หลังจากเปลี่ยนแล้วจะเปลี่ยนเป็นลักษณะรีโอสแตติกที่จุด 2. ตามแนวเส้น 2–3 การชะลอตัวเกิดขึ้น (สอดคล้องกับห้า serifs) ณ จุดนั้น 3 มอเตอร์จะหยุดทำงานและต้องตัดการเชื่อมต่อจากแหล่งจ่ายไฟหลักเพื่อหลีกเลี่ยงการเปลี่ยนเป็นโหมดมอเตอร์ด้วยการหมุนย้อนกลับ
ที่ มอเตอร์กระแสตรงพร้อมชุดกระตุ้นde-niemกระแสเกราะยังเป็นกระแสกระตุ้น ฟลักซ์แม่เหล็กกระตุ้นจะเพิ่มขึ้นตามภาระที่เพิ่มขึ้น ซึ่งส่งผลให้ความเร็วเชิงมุมลดลงตามสมการ (6.1) และ ลักษณะทางกลเครื่องยนต์จะนิ่ม (รูปที่ 6.3) ด้วยเหตุนี้ NV DPT จึงเอาชนะการโอเวอร์โหลดได้ค่อนข้างง่ายและราบรื่นและมีแรงบิดเริ่มต้นสูง คุณสมบัติเหล่านี้ของเครื่องยนต์ทำให้สามารถใช้กันอย่างแพร่หลายในการขับเคลื่อนกลไกการขนย้าย ลักษณะทางกลของเครื่องยนต์จะอ่อนลงอย่างเห็นได้ชัดเมื่อมีการนำลิโน่เข้าสู่วงจรกระดอง (รูปที่ 6.3 เส้นที่มีรอยบากเดียว)
ข้าว. 6.3. ลักษณะทางกลของมอเตอร์กระแสตรง
ด้วยการกระตุ้นตามลำดับ
ใน DPT PV เป็นไปไม่ได้ที่จะใช้โหมดการเบรกแบบสร้างใหม่ เนื่องจากไม่มีความเร็วรอบเดินเบาในอุดมคติ
การเบรกแบบไดนามิก สามารถทำได้ตามโครงการด้วยการกระตุ้นตนเองและด้วยการกระตุ้นอิสระ ในกรณีแรก กระดองและขดลวดกระตุ้นจะถูกตัดการเชื่อมต่อจากเครือข่ายและปิดไปยังลิโน่ ถึง หลีกเลี่ยงการลดระดับเครื่องจำเป็นต้องเปลี่ยนขดลวดกระตุ้น (หรือกระดอง) เพื่อให้ทิศทางของกระแสในขดลวดกระตุ้นไม่เปลี่ยนแปลง ในกรณีนี้ เครื่องจะกระตุ้นตัวเองด้วยความต้านทานที่กำหนดของวงจรกระดองที่ค่าที่กำหนดเท่านั้น ความเร็วเชิงมุม; ตื่นเต้น มันสร้างช่วงเวลาเบรก ลักษณะทางกลไม่เป็นเชิงเส้น (ในรูปที่ 6.3 - เส้นโค้งที่มีรอยบากสี่จุด)
ลักษณะทางกลของเครื่องยนต์ในโหมดเบรกแบบไดนามิกพร้อมแรงกระตุ้นอิสระนั้นคล้ายกับลักษณะที่เกี่ยวข้องของเครื่องยนต์ที่มีแรงกระตุ้นอิสระ (ในรูปที่ 6.3 - เส้นที่มีรอยบากสองจุด) พบวิธีการเบรกแบบนี้ ประยุกต์กว้างและวิธีแรกนั้นไม่ค่อยได้ใช้ โดยเฉพาะในกรณีฉุกเฉิน เช่น เมื่อแรงดันไฟหลักดับ
การเบรกโดยฝ่ายตรงข้ามจะดำเนินการดังเช่นใน DPT NV ในสองวิธี:
1) รวมอยู่ในวงจรกระดองที่มีความต้านทานสูง
2) โดยการเปลี่ยนขั้วของขดลวดกระดองโดยปล่อยให้ทิศทางของกระแสในขดลวดกระตุ้นไม่เปลี่ยนแปลง
ด้วยวิธีแรก ลักษณะทางกลจะเป็นความต่อเนื่องของคุณลักษณะที่สอดคล้องกับโหมดมอเตอร์ (ในรูปที่ 6.3 - เส้นที่มีสามรอยบาก) ในวิธีที่สอง การเบรกจะดำเนินการตามแนวเส้น 1 –2–3 .
การควบคุมความเร็วของไดรฟ์ไฟฟ้ากระแสตรงความเร็วของ DPT NV สามารถปรับได้:
1) โดยการเปลี่ยนความต้านทานในวงจรกระดอง
2) การเปลี่ยนแปลงของกระแสกระตุ้น;
3) โดยการเปลี่ยนแรงดันไฟฟ้าที่จ่ายให้กับกระดอง
ระเบียบข้อบังคับ ตามวิธีแรกมีข้อเสียที่สำคัญ:
- ความแข็งแกร่งของลักษณะทางกลลดลงเมื่อความเร็วเชิงมุมลดลงและการสูญเสียพลังงานในวงจรหลักเพิ่มขึ้น
- ช่วงการควบคุมมีจำกัด โดยเฉพาะที่โหลดต่ำ
– ความเรียบเล็กน้อยและความถูกต้องของการควบคุม
ด้วยเหตุผลเหล่านี้ กฎระเบียบประเภทนี้จึงไม่ค่อยได้ใช้ในไดรฟ์ DC
โดย วิธีที่สองเป็นไปได้ที่จะควบคุมฟลักซ์แม่เหล็กในทิศทางของการลดลงเท่านั้น (เนื่องจากในโหมดระบุวงจรแม่เหล็กของมอเตอร์จะอิ่มตัว) ซึ่งสอดคล้องกับการเพิ่มความเร็วเหนือระดับเล็กน้อย ช่วงการควบคุมความเร็วที่เป็นไปได้ไม่เกิน 2 สำหรับมอเตอร์มาตรฐาน ขีด จำกัด ความเร็วสูงสุดถูก จำกัด ด้วยความแข็งแรงทางกลของชิ้นส่วนกระดองของเครื่องยนต์ - ผ้าพันแผลที่พันกันของกระดองตัวสะสม
วิธีหลักในการควบคุมความเร็วของ DPT NV คือวิธีการขึ้นอยู่กับการเปลี่ยนแรงดันไฟฟ้าที่จ่ายให้กับกระดอง ซึ่งดำเนินการโดยใช้ตัวแปลงแบบปรับได้พิเศษ ตัวแปลงไทริสเตอร์ส่วนใหญ่จะใช้เป็นแหล่งพลังงานเดี่ยว ความแข็งแกร่งของลักษณะทางกลของไดรฟ์ตามระบบ "ตัวแปลง - DCT NV" นั้นเกือบจะคงที่ ลักษณะทางกลคือกลุ่มของเส้นตรงที่ขนานกัน ช่วง ความราบรื่น และความแม่นยำของการควบคุมที่นี่สูงกว่าวิธีการควบคุมอื่นๆ ดังนั้นระบบขับเคลื่อนนี้จึงใช้สำหรับกลไกที่ต้องการการควบคุมความเร็วที่ลึกและราบรื่น
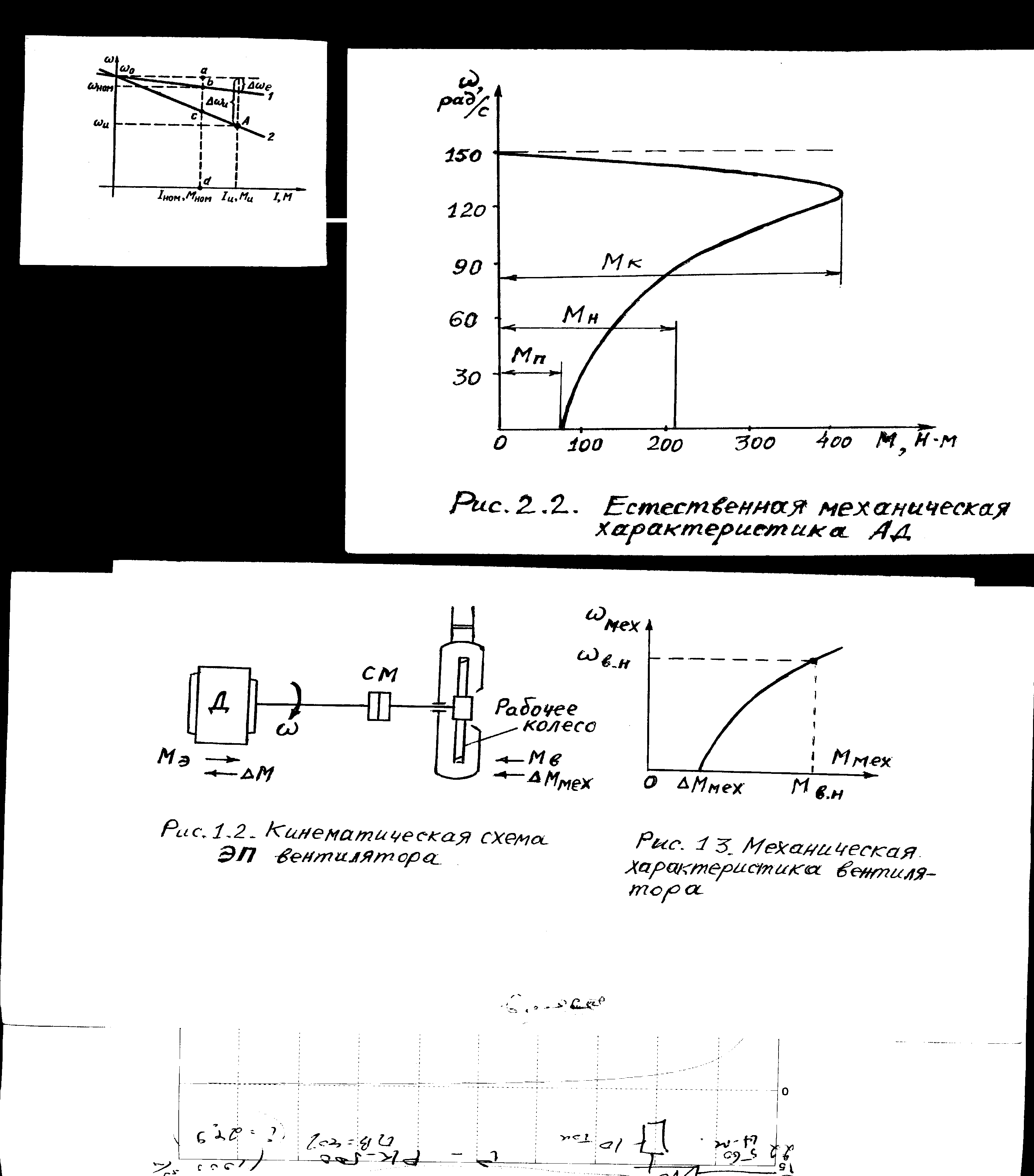
การคำนวณตัวต้านทานเพิ่มเติมในวงจรกระดอง DPT NVหากทราบลักษณะทางไฟฟ้าหรือทางกลตามธรรมชาติ 1 เครื่องยนต์ (รูปที่ 6.4) และข้อมูลพาสปอร์ต จากนั้นจึงคำนวณความต้านทาน R d เมื่อรวมอยู่ในวงจรกระดอง ลักษณะประดิษฐ์ที่ต้องการ 2 จะผ่านจุด A ด้วยพิกัดที่กำหนด ω และ ฉันและ หรือ ω และ, M และ สามารถทำได้โดยวิธีทั่วไปดังต่อไปนี้
ข้าว. 6.4. ลักษณะของ DPT HB สำหรับการคำนวณค่า
ตัวต้านทานควบคุม
วิธีสัดส่วน. ให้เราเขียนอัตราส่วนของความเร็วที่ลดลงในปัจจุบัน ฉันและหรือชั่วขณะ เอ็มและบนธรรมชาติ Δω e และประดิษฐ์ที่ต้องการ Δω และลักษณะ:
Δω e / Δω u = ฉันและ Rฉัน / ( ฉันและ ( Rฉัน + Rจ)) = Rฉัน / ( Rฉัน + Rจ)
แล้วค่าที่ต้องการ
Rง = Rผม (Δω และ / Δω e - 1).
วิธีการแบ่งส่วนไม่ต้องการความรู้เกี่ยวกับค่าความต้านทานภายในของมอเตอร์ Rผม (ยิ่งไปกว่านั้น ค่าของมันสามารถกำหนดโดยลักษณะทางธรรมชาติที่รู้จัก)
ลองเขียนนิพจน์สำหรับความเร็วของมอเตอร์บนคุณลักษณะเทียมที่กำหนด (ดูรูปที่ 6.4) ที่พิกัดกระแส ฉัน n, ช่วงเวลา เอ็ม n, ฟลักซ์แม่เหล็ก F n และแรงดัน ยูน:
ω และ = ยู n / (kF n) (1 - ฉันน R/ ยูน)
ที่ไหน ยู n / (kF n) \u003d ω 0
ω และ = ω 0 (1 – R / Rน)
ที่นี่ Rน = ยูไม่มี ฉัน n - ความต้านทานเล็กน้อยที่เรียกว่าซึ่งเป็นค่าฐานในการคำนวณโอห์ม
อัตราส่วน
R / ยู n \u003d (ω 0 - ω และ) / ω 0 \u003d δ
สะท้อนคุณสมบัติที่สำคัญของ NV DPT: ความแตกต่างของความเร็วสัมพัทธ์ δ \u003d Δω / ω 0 เท่ากับความต้านทานเชิงแอ็คทีฟสัมพัทธ์ของวงจรกระดอง R / Rน.
มากำหนดกันในรูป 6.4 จุดเด่น เอ, ข,กับ, dและสังเกตว่า ω 0 – ω และ = Δω = ace, ω 0 = โฆษณาแล้ว R = R n Δω / ω 0 = Rน ace/โฆษณา; Rง = Rน ขกับ/โฆษณา; Rผม = Rน เอข /โฆษณา.
จึงจะพบว่า R d ก่อนอื่นคุณต้องกำหนดความยาวของส่วนตามลักษณะ ขกับและ โฆษณาที่ จัดอันดับปัจจุบันหรือแรงบิดและคำนวณความต้านทานเล็กน้อย Rน = ยูไม่มี ฉันน.
การคำนวณตัวต้านทานเพิ่มเติมสามารถทำได้โดยใช้สูตรต่อไปนี้สำหรับกระแสที่อนุญาต ฉันเพิ่มเติมซึ่งกำหนดโดยค่าของช่วงเวลาที่อนุญาต เอ็มเงื่อนไขเพิ่มเติมหรือเงื่อนไขในการสตาร์ท การถอยหลัง และการเบรก
ความต้านทานตัวต้านทาน R d1 ที่จุดเริ่มต้น ( อี = 0)
R q1 = ( ยู / ฉันเพิ่ม) - Rฉัน.
ความต้านทานตัวต้านทาน R d2 ระหว่างการเบรกแบบไดนามิก
R q2 = ( อี / ฉันเพิ่ม) - Rฉัน ≈ ( ยู / ฉันเพิ่ม) - Rฉัน).
ความต้านทานตัวต้านทาน R d3 เมื่อถอยหลังหรือเบรกโดยป้องกันการสลับ
R d3 = (( ยู + อี) / ฉันเพิ่ม) - Rฉัน ≈ (2 ยู / ฉันเพิ่ม) - Rฉัน.
ตัวอย่าง . DPT NV ประเภท PBST-53 มีข้อมูลหนังสือเดินทางดังต่อไปนี้: R n = 4.8 กิโลวัตต์; น n = 1500 รอบต่อนาที; ยู n = 220 V; ฉัน n = 24.2 A; Rผม = 0.38 โอห์ม; ฉัน v.n = 0.8 A. จำเป็นต้องกำหนด:
1) ความต้านทานของตัวต้านทานซึ่งรวมอยู่ในวงจรกระดองมอเตอร์จะช่วยให้มั่นใจได้ว่าลักษณะทางกลประดิษฐ์ผ่านจุดที่มีพิกัด ω และ = 90 rad / s เอ็ม n = 25 Nm;
2) ความต้านทานของตัวต้านทานซึ่งรวมไว้ซึ่งจะ จำกัด กระแสในระหว่างการสตาร์ทและการเบรกโดยตรงกันข้ามกับระดับ ฉันเพิ่ม = 3 ฉันน.
ในเครื่อง DC ขดลวดกระดองมีความต้านทานต่ำ และเมื่อเชื่อมต่อกับเครือข่าย กระแสเริ่มต้นซึ่งสามารถเข้าถึง 15...20I nom. การเพิ่มขึ้นของกระแสกระดองที่สูงกว่าค่า 2...2.5I nom นำไปสู่การเสื่อมสภาพของสวิตชิ่ง
นอกจากนี้ แรงไดนามิกที่เป็นผลสามารถค่อยๆ ทำลายขดลวดเกราะ ทำให้เกิดการตัดกุญแจ การบิดของเพลา ฯลฯ ข้อ จำกัด ของกระแสเริ่มต้นดำเนินการโดยใช้ความต้านทาน r 1, r 2, r 3 ซึ่งรวมอยู่ในวงจรสมอ (รูปที่ 2.12) เมื่อมอเตอร์เร่งความเร็ว EMF จะเพิ่มขึ้นและกระแสจะลดลง โดยการลัดวงจรแนวต้านอย่างต่อเนื่องด้วยหน้าสัมผัส KM1, KM2, KMZ พวกเขาเริ่ม (ดำเนินการ) ไดอะแกรมสตาร์ทเครื่องยนต์แสดงในรูปที่ 2.13.
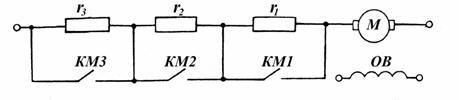
ข้าว. 2.13. แบบแผนสำหรับการเปิดตัวต้านทานเริ่มต้น ..
ค่าของกระแสสลับ I 1 และ I 2 ถูกเลือกตามข้อกำหนดของเทคโนโลยีสำหรับไดรฟ์ไฟฟ้าและความสามารถในการสลับของมอเตอร์ ดังนั้นพวกเขาจึงใช้ I 1 \u003d (2.0 ... 2.5) I H และฉัน 2 \u003d (1.2 ... 1.3) I H ในกรณีที่ระยะเวลาของการสตาร์ทเครื่องยนต์ส่งผลต่อประสิทธิภาพของเครื่องที่เปิดบ่อย .
ถ้าคุณต้องการ เริ่มต้นอย่างราบรื่นตัวอย่างเช่น ลิฟต์โดยสาร ค่าของกระแสสลับจะถูกกำหนดโดยการเร่งความเร็วที่อนุญาตของไดรฟ์ไฟฟ้า ในกรณีที่สตาร์ทหายากและเงื่อนไขการสตาร์ทไม่จำกัด ค่าของกระแส I 1 และ I 2 สามารถรับได้มากกว่ากระแสไฟที่ใช้งานเล็กน้อย (แต่น้อยกว่าในกรณีแรกมากเมื่อ ผม 1 = (2 ... 2.5) ผม N.
ค่านิยม แนวต้านเริ่มต้นคำนวณโดยวิธีการวิเคราะห์และกราฟิก หากกำหนดจำนวนขั้นตอนไว้ แสดงว่ามีการดำเนินการคำนวณสำหรับแผงคอนแทคเตอร์มาตรฐานที่ทราบอยู่แล้ว หากไม่ทราบจำนวนขั้นต้องเลือก
วิธีวิเคราะห์เพื่อคำนวณความต้านทานเริ่มต้น
เมื่อเครื่องยนต์เชื่อมต่อกับเครือข่าย การเร่งความเร็วเริ่มต้นด้วยความต้านทานเริ่มต้น R 3 \u003d r I + r 1 + r 2 + r 3 (รูปที่ 2.13) ความต้านทานเหล่านี้สอดคล้องกับลักษณะทางไฟฟ้าเครื่องกลเทียม
1 - 2 - ω 0 (รูปที่ 2.14) ที่ปัจจุบัน I 2 และความเร็ว ω 2 (จุดที่ 2) ความต้านทานเพิ่มเติม r 3 จะถูกปัดโดยหน้าสัมผัส KMZ และกระแสของมอเตอร์จะเพิ่มขึ้นอีกครั้งเป็น I 1 (จุดที่ 3) การเริ่มต้นดำเนินต่อไปด้วยความต้านทาน R 3 \u003d r I + r 1 + r 2 ตามลักษณะ Z - 4 - ω o ที่จุดที่ 4 ของคุณลักษณะนี้ r 2 จะถูกปิดโดยการสัมผัส KM2 ด้วยแรงต้าน
R 3 \u003d r I + r 1 เครื่องยนต์เร่งความเร็วตามลักษณะ 5 - 6 - ω o ที่ความเร็ว ω 6 (จุดที่ 6) ความต้านทานสุดท้าย r 1 จะถูกปิดและเครื่องยนต์จะไปถึงลักษณะทางไฟฟ้าตามธรรมชาติ 7 - 8 - ω o ซึ่งจะเร่งความเร็วเป็นความเร็วที่สอดคล้องกับโหลดบนเพลา
ในการกำหนดค่าความต้านทานเพิ่มเติม เราใช้อัตราส่วนของกระแสที่สอดคล้องกับจุดที่ 3 และ 2 ที่ความเร็วเชิงมุม ω 2 ของแผนภาพเริ่มต้น:
![]() . (2.31)
. (2.31)
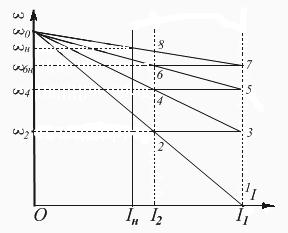
ข้าว. 2.14. ไดอะแกรมเริ่มต้น DPT NV
ค่า EMF ของมอเตอร์ที่จุดเหล่านี้มีค่าเท่ากันเนื่องจากความเร็วในการหมุน ω 2 ไม่เปลี่ยนแปลง
หลังจากลดแรงดันไฟฟ้าเราได้รับ:
![]() .
.
ที่ความเร็วเชิงมุม ω 4 สำหรับจุด 4-5 เราเขียนว่า:
![]() ;
;
ที่นี่ E 4 \u003d E 5 และกระแส I 5 \u003d I 1, I 4 \u003d I 2 ดังนั้น:
![]() .
.
ในทำนองเดียวกันสำหรับความเร็วเชิงมุม ω 6 (จุดที่ 6 และ 7):
![]()
หรือ ![]() .
.
ให้เราแสดงอัตราส่วนของกระแสสลับ: แล้ว
หากมีขั้นตอน m ให้เปรียบเทียบ:
ในนิพจน์นี้ จำนวนของสเตจเริ่มต้น m และหลายหลากของกระแสเริ่มต้นมีความสัมพันธ์กัน:
![]() (2.34) หรือ . (2.35)
(2.34) หรือ . (2.35)
ค่าความต้านทานของแต่ละขั้นตอนสามารถกำหนดได้ดังนี้:
ขั้นตอนการคำนวณความต้านทานเริ่มต้น
หากกำหนดจำนวนขั้นตอน m การคำนวณความต้านทานจะดำเนินการดังนี้:
1) ตั้งค่าปัจจุบัน I 1 และกำหนด R m:
2) ค้นหาอัตราส่วนของกระแสสลับ:
![]() , (2.37)
, (2.37)
ที่ไหน ; P n, U n, I n, η n - ข้อมูลหนังสือเดินทางของเครื่องยนต์
3) คำนวณค่าของกระแสสลับที่สอง I 2:
และเปรียบเทียบกับกระแสการทำงานของมอเตอร์ I ที่สอดคล้องกับแรงบิดสูงสุดของเครื่องทำงานเมื่อเริ่มทำงาน
ถ้าทราบโมเมนต์การทำงาน M s แล้ว
![]() ,
,
และหากกำลังบนเพลาของเครื่องทำงานได้รับ P V.r.m. , แล้ว
![]() .
.
สำหรับผม 2 > (1.1...1.2) ผม c เรากำหนดความต้านทานของแต่ละขั้น:
...![]() . (2.38)
. (2.38)
ถ้าไม่ตรงตามเงื่อนไข I 2 > 1,1I c เราก็เลือกใหม่
(มากกว่า) ค่าของ I 1 และคำนวณซ้ำ
หากไม่ทราบจำนวนขั้นตอนการต้านทาน การคำนวณจะดำเนินการตามลำดับต่อไปนี้:
1) เราตั้งค่ากระแสสลับ I 1, I 2 และกำหนด λ:
2) กำหนดจำนวนขั้นตอน:
ที่ไหน ; ![]() .
.
ค่าผลลัพธ์ของ m (ถ้าเป็นเศษส่วน) จะถูกปัดขึ้นเป็น
จำนวนเต็มที่ใกล้ที่สุดและระบุ λ และปัจจุบัน I 2:
![]() ; .
; .
การคำนวณเพิ่มเติมจะดำเนินการเหมือนในกรณีแรก หลังจากเสร็จสิ้นการคำนวณสำหรับตัวเลือกแรกหรือตัวเลือกที่สอง จำเป็นต้องตรวจสอบความถูกต้องของการคำนวณ ในการทำเช่นนี้เราจะกำหนดยอดรวม
ความต้านทาน:
และเปรียบเทียบกับต้นฉบับ ส่วนเบี่ยงเบนในการคำนวณควรอยู่ภายในข้อผิดพลาดที่อนุญาต - 5 ... 7%
วิธีการแบบกราฟิกสำหรับคำนวณความต้านทานเริ่มต้น
วิธีการคำนวณนี้ให้ภาพแสดงค่าความต้านทานเพิ่มเติม แต่มี ข้อเสียที่สำคัญ -
ความถูกต้องของการคำนวณขึ้นอยู่กับความถูกต้องของการสร้างไดอะแกรมเริ่มต้นของเครื่องยนต์
คุณสมบัติทางไฟฟ้าสำหรับมอเตอร์กระแสตรงที่มีความต้านทานเพิ่มเติม R ต่อ รวมอยู่ในวงจรกระดอง แสดงในรูป 2.15.
รูปที่ 2.15 ลักษณะเฉพาะทางไฟฟ้าของ DPT NV พร้อมการแนะนำตัวต้านทานเพิ่มเติมในวงจรกระดอง
สมการ EMF สำหรับพิกัดกระแสและความเร็ว ω
(จุดที่):
เราแบ่งนิพจน์สุดท้ายเป็น sf n:
![]() . (2.39)
. (2.39)
จากรูปที่ 2.15 เรามี:
 (2.40)
(2.40)
เปรียบเทียบนิพจน์ (2.39) และ (2.40) เราเขียน:
ดังนั้นสำหรับค่าคงที่ของ I n และ sf n ค่าของเซ็กเมนต์ ab จะเป็นสัดส่วนกับ . ถ้าคุณสมบัติผ่านจุด r , แล้วทุกอย่างที่ใช้ U n จะสมดุลด้วยการตกใน
ความต้านทาน R n:
R n มีชื่อ ความต้านทานเล็กน้อย,![]() . พิกัดความต้านทานมอเตอร์ - eนี่คือความต้านทานของวงจรกระดองซึ่งในขณะที่เปิดเครื่อง (ที่ ω = 0) กระแสไฟที่กำหนดจะไหลในขดลวดกระดอง เซ็กเมนต์ ag เป็นสัดส่วนกับ R n ดังนั้นตามค่าของเซ็กเมนต์ที่ถูกตัดโดยคุณลักษณะบนเส้นกระแสไฟที่กำหนด จึงสามารถคำนวณความต้านทานของวงจรกระดองได้ แต่สำหรับสิ่งนี้คุณต้องรู้มาตราส่วน
. พิกัดความต้านทานมอเตอร์ - eนี่คือความต้านทานของวงจรกระดองซึ่งในขณะที่เปิดเครื่อง (ที่ ω = 0) กระแสไฟที่กำหนดจะไหลในขดลวดกระดอง เซ็กเมนต์ ag เป็นสัดส่วนกับ R n ดังนั้นตามค่าของเซ็กเมนต์ที่ถูกตัดโดยคุณลักษณะบนเส้นกระแสไฟที่กำหนด จึงสามารถคำนวณความต้านทานของวงจรกระดองได้ แต่สำหรับสิ่งนี้คุณต้องรู้มาตราส่วน
ความต้านทาน:
ที่ไหน ; คุณ n ฉัน n, R n, - พิกัดแรงดันไฟฟ้า,กระแสไฟและกำลังของมอเตอร์
วิธีแรกในการกำหนดมาตราส่วนมีความแม่นยำมากขึ้น เนื่องจาก
กลุ่ม ag มากกว่ากลุ่ม ab
เมื่อคำนวณความต้านทานเริ่มต้นของมอเตอร์กระแสตรงด้วยวิธีกราฟิก จะมีตัวเลือกสองแบบให้เลือก
1. กำหนดจำนวนสเตจเริ่มต้น m
ตามข้อมูลหนังสือเดินทางของเครื่อง เราสร้างคุณลักษณะทางไฟฟ้าโดยธรรมชาติโดยใช้สองจุด (ω o, M = 0) และ (I n, ω n)
(รูปที่ 2.16) กันค่าของกระแสสลับ ผม 1 และ ผม 2 .
ค่าของพวกเขาจะต้องได้รับการพิสูจน์ตามข้อกำหนดด้านเทคโนโลยีสำหรับไดรฟ์ไฟฟ้าและความสามารถในการสลับของมอเตอร์ ค่าจำกัดของกระแส I 1 เท่ากับ (2 ... 2.5) ผม n. ปัจจุบัน ผม 2 \u003d (1.2 ... 1.3) ผม n. ผ่านจุดที่สอดคล้องกับค่าของ I 1 และ I 2 บนแกนของกระแส เราวาดเส้นตรงสองเส้นขนานกับแกนของความถี่ของการหมุน เราเชื่อมต่อจุดที่ 1 และ ω o กับเส้นตรงที่ตัดกันที่จุดที่ 2 กับกระแส I 2 .
คำสั่งก่อสร้างเพิ่มเติมจากจุดที่ 2 ถึง 3 เป็นต้น มองเห็นได้จากรูป 2.16. จากการก่อสร้าง จำเป็นต้องไปยังจุดตัดของคุณลักษณะทางไฟฟ้าธรรมชาติและกระแสสลับ I 1 (จุดที่ 7) หากการแข่งขันไม่ได้ผลหรือจำนวนฟุตไม่เท่ากับที่ระบุก็จำเป็นต้องเปลี่ยนค่าของ I 2 หรือ I 1 ปัจจุบันและทำซ้ำการก่อสร้าง

ข้าว. 2.16. วิธีการแบบกราฟิกสำหรับคำนวณความต้านทานเริ่มต้น
ดังนั้นกระบวนการสตาร์ทเครื่องยนต์ในหลายขั้นตอนดังแสดงในรูปที่ 2.16 มีลักษณะเฉพาะโดยที่กระแสของมอเตอร์ในระหว่างการสตาร์ทเครื่องแตกต่างจาก . ในช่วงเริ่มต้นของการเริ่มต้น เมื่อมอเตอร์เร่งขึ้น EMF ของมันจะเพิ่มขึ้น อันเป็นผลมาจากกระแสในวงจรกระดองของมอเตอร์เริ่มลดลง และด้วยเหตุนี้ แรงบิดของมอเตอร์ เมื่อกระแสไฟถึง ส่วนหนึ่งของรีโอสแตตสตาร์ทจะถูกปิดเพื่อให้กระแสไฟของมอเตอร์กลับมาถึงค่าอีกครั้ง ฯลฯ
เมื่อตัวต้านทานเริ่มต้นถูกถอดออก ความต้านทานของวงจรกระดองจะลดลง และด้วยเหตุนี้ ค่าคงที่ของระบบเครื่องกลไฟฟ้าก็ลดลงเช่นกัน ซึ่งส่งผลให้ระยะเวลาของการเริ่มต้นในแต่ละขั้นตอนต่อมาลดลง
มอเตอร์กระแสตรงสามารถมีแรงกระตุ้นแบบอิสระ แบบขนาน แบบอนุกรมหรือแบบผสม (รูปที่ 6.1)
ข้าว. 6.1. วงจรมอเตอร์กระแสตรงอิสระ ( เอ),
ขนาน ( ข) ตามลำดับ ( ใน) และผสม ( จี) การกระตุ้น
(ส่วนบนของโครงการ "c" เป็นของโครงการ "a")
ในมอเตอร์กระตุ้นแบบขนาน ขดลวดสนามจะเชื่อมต่อแบบขนานกับขั้วต่อกระดอง แต่กระแสที่ไหลผ่านขดลวดนี้ไม่เหมือนกับกระแสกระดองไม่ขึ้นอยู่กับโหลดและถูกกำหนดโดยแรงดันไฟฟ้าที่ใช้กับกระดองและความต้านทานรวมของวงจรกระตุ้น ด้วยเหตุนี้มอเตอร์ที่ตื่นเต้นแบบแบ่งจึงเรียกว่ามอเตอร์ที่ตื่นเต้นแบบอิสระ
แรงบิด เอ็มมอเตอร์กระแสตรงและ EMF อีถูกกำหนดโดยสูตร
เอ็ม= ถึง F ฉันฉัน; อี= kFω,
โดยที่ k คือสัมประสิทธิ์การออกแบบของเครื่องยนต์
Ф – ฟลักซ์แม่เหล็ก, Wb;
ฉันผม - กระแสเกราะ A.
ω คือความเร็วเชิงมุม rad/s
สมการเครื่องกลไฟฟ้า ω = ƒ ( ฉันผม) และกลไก ω = ƒ ( เอ็ม) มีลักษณะเป็นรูป
ω = ยู/(kF) – ( Rฉัน + Rพี) / (k F) ฉันฉัน;
ω = ยู/(kF) – ( Rฉัน + R p) / (ถึง 2 F 2) เอ็ม.
ความเร็วเชิงมุมของรอบเดินเบาในอุดมคติ (at ฉันผม = 0 หรือ เอ็ม = 0)
ω 0 = ยู/(kF).
ในรูป 6.2 แสดงลักษณะทางกลของมอเตอร์กระแสตรงที่มีการกระตุ้นอิสระ (DPT NV) ในทุกโหมดการทำงาน จุดลักษณะของคุณลักษณะในโหมดมอเตอร์คือ: จุดรอบเดินเบาในอุดมคติ (ω 0 0 เอ็ม= 0); จุดโหมดเล็กน้อย (ω n, เอ็ม n); จุดลัดวงจร (ω = 0, เอ็ม = เอ็มถึง).
ความแข็งแกร่งของลักษณะทางกลถูกกำหนดโดยฟลักซ์กระตุ้นและความต้านทานของวงจรสมอ:
β = d เอ็ม/dω = - ถึง 2 Ф 2 / ( Rฉัน + Rพี) = - เอ็มถึง / ω.
ข้าว. 6.2. ลักษณะทางกลแบบผสมผสานของมอเตอร์กระแสตรงที่มีแรงกระตุ้นอิสระ
ค่าสูงสุดของโมดูลัสความแข็งสอดคล้องกับลักษณะทางกลตามธรรมชาติ เนื่องจากกระแสกระตุ้นเท่ากับกระแสที่กำหนดและความต้านทานการควบคุม R p \u003d 0 เมื่อความต้านทานของลิโน่เพิ่มขึ้น R p ความชันของคุณสมบัติทางกลเพิ่มขึ้น และความเร็วเชิงมุมลดลง สำหรับค่าความต้านทานที่กำหนด R p และแรงบิดสูงสุด เอ็ม n ความเร็วเชิงมุมของเครื่องยนต์
ω n.r = ω 0 (1 – ฉันน ( Rฉัน + Rร) / ยูน.
ในการคำนวณลักษณะทางกล จำเป็นต้องทราบความต้านทานของกระดองของมอเตอร์ R i ซึ่งระบุไว้ในไดเร็กทอรี ในกรณีที่ไม่มีข้อมูลโรงงาน ค่า Rหาได้ประมาณตามสูตร
Rผม \u003d 0.5 (1 - ŋ n) ( ยูไม่มี ฉันน)
เนื่องจากลักษณะทางกลของ DPT NV นั้นตรงไปตรงมา จึงเพียงพอแล้วที่จะมีจุดสองจุดในการวาด:
1) ω = ω 0 และ เอ็ม = 0,
2) ω = ω n (หรือ ω = ω n.r) และ เอ็ม = เอ็มน.
สำหรับ DPT NV สามารถเบรกด้วยไฟฟ้าได้สามโหมดต่อไปนี้
1. เบรกแบบสร้างใหม่ซึ่งเกิดขึ้นเมื่อความเร็วของเครื่องยนต์สูงกว่าความเร็วรอบเดินเบาในอุดมคติ ประหยัดที่สุดเนื่องจากพลังงานเบรกถูกถ่ายโอนไปยังเครือข่ายไฟฟ้า ลักษณะทางกลในโหมดนี้เป็นความต่อเนื่องของคุณลักษณะที่สอดคล้องกันของโหมดมอเตอร์ในจตุภาค II วงจรมอเตอร์ไม่เปลี่ยนแปลงระหว่างการเบรกแบบสร้างใหม่
2. การเบรกแบบไดนามิก. กระดองมอเตอร์ถูกตัดการเชื่อมต่อจากเครือข่ายและลัดวงจรเป็นความต้านทาน ในกรณีนี้ พลังงานกลของชิ้นส่วนที่เคลื่อนไหว (กลไกและเกราะของมอเตอร์) จะถูกแปลงเป็นพลังงานไฟฟ้าซึ่งสูญเสียไปในรูปของพลังงานความร้อนในความต้านทานของวงจรสมอ ลักษณะทางกลในโหมดเบรกนี้ผ่านจุดเริ่มต้น (ในรูปที่ 6.2 - เส้นที่มีสามรอยบาก)
3. เบรกถอยหลังดำเนินการในสองวิธี:
1) การแนะนำของความต้านทานสูงในวงจรกระดองในกรณีนี้ แรงบิดของมอเตอร์จะน้อยกว่าแรงบิดโหลดแบบสถิต เอ็มกับ. เครื่องยนต์ดับ (ที่จุด A) จากนั้นอยู่ภายใต้อิทธิพลของแรงบิด เอ็ม c เริ่มหมุนไปในทิศทางอื่นทำให้เกิดแรงบิดในการเบรก ที่จุด B จะเกิดสภาวะคงตัว ลักษณะทางกลคือความต่อเนื่องของคุณสมบัติที่สอดคล้องกันของโหมดมอเตอร์ (ในรูปที่ 6.2 - เส้นที่มีสี่เซอริฟ)
2) เบรกโดยการเปลี่ยนขั้วของกระดองที่คดเคี้ยวไปพร้อมกัน. เครื่องยนต์ทำงานที่จุด 1 หลังจากเปลี่ยนแล้วจะเปลี่ยนเป็นลักษณะรีโอสแตติกที่จุด 2. ตามแนวเส้น 2–3 การชะลอตัวเกิดขึ้น (สอดคล้องกับห้า serifs) ณ จุดนั้น 3 มอเตอร์จะหยุดทำงานและต้องตัดการเชื่อมต่อจากแหล่งจ่ายไฟหลักเพื่อหลีกเลี่ยงการเปลี่ยนเป็นโหมดมอเตอร์ด้วยการหมุนย้อนกลับ
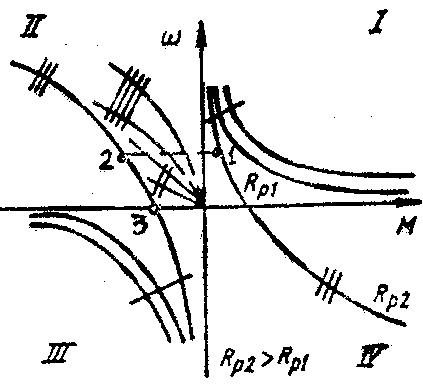
ที่ มอเตอร์กระแสตรงพร้อมชุดกระตุ้นde-niemกระแสเกราะยังเป็นกระแสกระตุ้น ฟลักซ์แม่เหล็กกระตุ้นจะเพิ่มขึ้นตามภาระที่เพิ่มขึ้น ซึ่งเป็นผลมาจากความเร็วเชิงมุมลดลงตามสมการ (6.1) และลักษณะทางกลของมอเตอร์จะนิ่มนวล (รูปที่ 6.3) ด้วยเหตุนี้ NV DPT จึงเอาชนะการโอเวอร์โหลดได้ค่อนข้างง่ายและราบรื่นและมีแรงบิดเริ่มต้นสูง คุณสมบัติเหล่านี้ของเครื่องยนต์ทำให้สามารถใช้กันอย่างแพร่หลายในการขับเคลื่อนกลไกการขนย้าย ลักษณะทางกลของเครื่องยนต์จะอ่อนลงอย่างเห็นได้ชัดเมื่อมีการนำลิโน่เข้าสู่วงจรกระดอง (รูปที่ 6.3 เส้นที่มีรอยบากเดียว)
ข้าว. 6.3. ลักษณะทางกลของมอเตอร์กระแสตรง
ด้วยการกระตุ้นตามลำดับ
ใน DPT PV เป็นไปไม่ได้ที่จะใช้โหมดการเบรกแบบสร้างใหม่ เนื่องจากไม่มีความเร็วรอบเดินเบาในอุดมคติ
การเบรกแบบไดนามิก สามารถทำได้ตามโครงการด้วยการกระตุ้นตนเองและด้วยการกระตุ้นอิสระ ในกรณีแรก กระดองและขดลวดกระตุ้นจะถูกตัดการเชื่อมต่อจากเครือข่ายและปิดไปยังลิโน่ ถึง หลีกเลี่ยงการลดระดับเครื่องจำเป็นต้องเปลี่ยนขดลวดกระตุ้น (หรือกระดอง) เพื่อให้ทิศทางของกระแสในขดลวดกระตุ้นไม่เปลี่ยนแปลง ในกรณีนี้ เครื่องจะตื่นเต้นในตัวเองที่ความต้านทานที่กำหนดของวงจรกระดองที่ค่าความเร็วเชิงมุมที่กำหนดเท่านั้น ตื่นเต้น มันสร้างช่วงเวลาเบรก ลักษณะทางกลไม่เป็นเชิงเส้น (ในรูปที่ 6.3 - เส้นโค้งที่มีรอยบากสี่จุด)
ลักษณะทางกลของเครื่องยนต์ในโหมดเบรกแบบไดนามิกพร้อมแรงกระตุ้นอิสระนั้นคล้ายกับลักษณะที่เกี่ยวข้องของเครื่องยนต์ที่มีแรงกระตุ้นอิสระ (ในรูปที่ 6.3 - เส้นที่มีรอยบากสองจุด) วิธีการเบรกนี้มีการใช้งานอย่างกว้างขวาง และวิธีการแรกนั้นไม่ค่อยได้ใช้ ส่วนใหญ่เป็นกรณีฉุกเฉิน ตัวอย่างเช่น เมื่อแรงดันไฟหลักล้มเหลว
การเบรกโดยฝ่ายตรงข้ามจะดำเนินการดังเช่นใน DPT NV ในสองวิธี:
1) รวมอยู่ในวงจรกระดองที่มีความต้านทานสูง
2) โดยการเปลี่ยนขั้วของขดลวดกระดองโดยปล่อยให้ทิศทางของกระแสในขดลวดกระตุ้นไม่เปลี่ยนแปลง
ด้วยวิธีแรก ลักษณะทางกลจะเป็นความต่อเนื่องของคุณลักษณะที่สอดคล้องกับโหมดมอเตอร์ (ในรูปที่ 6.3 - เส้นที่มีสามรอยบาก) ในวิธีที่สอง การเบรกจะดำเนินการตามแนวเส้น 1 –2–3 .
การควบคุมความเร็วของไดรฟ์ไฟฟ้ากระแสตรงความเร็วของ DPT NV สามารถปรับได้:
1) โดยการเปลี่ยนความต้านทานในวงจรกระดอง
2) การเปลี่ยนแปลงของกระแสกระตุ้น;
3) โดยการเปลี่ยนแรงดันไฟฟ้าที่จ่ายให้กับกระดอง
ระเบียบข้อบังคับ ตามวิธีแรกมีข้อเสียที่สำคัญ:
- ความแข็งแกร่งของลักษณะทางกลลดลงเมื่อความเร็วเชิงมุมลดลงและการสูญเสียพลังงานในวงจรหลักเพิ่มขึ้น
- ช่วงการควบคุมมีจำกัด โดยเฉพาะที่โหลดต่ำ
– ความเรียบเล็กน้อยและความถูกต้องของการควบคุม
ด้วยเหตุผลเหล่านี้ กฎระเบียบประเภทนี้จึงไม่ค่อยได้ใช้ในไดรฟ์ DC
โดย วิธีที่สองเป็นไปได้ที่จะควบคุมฟลักซ์แม่เหล็กในทิศทางของการลดลงเท่านั้น (เนื่องจากในโหมดระบุวงจรแม่เหล็กของมอเตอร์จะอิ่มตัว) ซึ่งสอดคล้องกับการเพิ่มความเร็วเหนือระดับเล็กน้อย ช่วงการควบคุมความเร็วที่เป็นไปได้ไม่เกิน 2 สำหรับมอเตอร์มาตรฐาน ขีด จำกัด ความเร็วสูงสุดถูก จำกัด ด้วยความแข็งแรงทางกลของชิ้นส่วนกระดองของเครื่องยนต์ - ผ้าพันแผลที่พันกันของกระดองตัวสะสม
วิธีหลักในการควบคุมความเร็วของ DPT NV คือวิธีการขึ้นอยู่กับการเปลี่ยนแรงดันไฟฟ้าที่จ่ายให้กับกระดอง ซึ่งดำเนินการโดยใช้ตัวแปลงแบบปรับได้พิเศษ ตัวแปลงไทริสเตอร์ส่วนใหญ่จะใช้เป็นแหล่งพลังงานเดี่ยว ความแข็งแกร่งของลักษณะทางกลของไดรฟ์ตามระบบ "ตัวแปลง - DCT NV" นั้นเกือบจะคงที่ ลักษณะทางกลคือกลุ่มของเส้นตรงที่ขนานกัน ช่วง ความราบรื่น และความแม่นยำของการควบคุมที่นี่สูงกว่าวิธีการควบคุมอื่นๆ ดังนั้นระบบขับเคลื่อนนี้จึงใช้สำหรับกลไกที่ต้องการการควบคุมความเร็วที่ลึกและราบรื่น
การคำนวณตัวต้านทานเพิ่มเติมในวงจรกระดอง DPT NVหากทราบลักษณะทางไฟฟ้าหรือทางกลตามธรรมชาติ 1 เครื่องยนต์ (รูปที่ 6.4) และข้อมูลพาสปอร์ต จากนั้นจึงคำนวณความต้านทาน R d เมื่อรวมอยู่ในวงจรกระดอง ลักษณะประดิษฐ์ที่ต้องการ 2 จะผ่านจุด A ด้วยพิกัดที่กำหนด ω และ ฉันและ หรือ ω และ, M และ สามารถทำได้โดยวิธีทั่วไปดังต่อไปนี้
ข้าว. 6.4. ลักษณะของ DPT HB สำหรับการคำนวณค่า
ตัวต้านทานควบคุม
วิธีสัดส่วน. ให้เราเขียนอัตราส่วนของความเร็วที่ลดลงในปัจจุบัน ฉันและหรือชั่วขณะ เอ็มและบนธรรมชาติ Δω e และประดิษฐ์ที่ต้องการ Δω และลักษณะ:
Δω e / Δω u = ฉันและ Rฉัน / ( ฉันและ ( Rฉัน + Rจ)) = Rฉัน / ( Rฉัน + Rจ)
แล้วค่าที่ต้องการ
Rง = Rผม (Δω และ / Δω e - 1).
วิธีการแบ่งส่วนไม่ต้องการความรู้เกี่ยวกับค่าความต้านทานภายในของมอเตอร์ Rผม (ยิ่งไปกว่านั้น ค่าของมันสามารถกำหนดโดยลักษณะทางธรรมชาติที่รู้จัก)
ลองเขียนนิพจน์สำหรับความเร็วของมอเตอร์บนคุณลักษณะเทียมที่กำหนด (ดูรูปที่ 6.4) ที่พิกัดกระแส ฉัน n, ช่วงเวลา เอ็ม n, ฟลักซ์แม่เหล็ก F n และแรงดัน ยูน:
ω และ = ยู n / (kF n) (1 - ฉันน R/ ยูน)
ที่ไหน ยู n / (kF n) \u003d ω 0
ω และ = ω 0 (1 – R / Rน)
ที่นี่ Rน = ยูไม่มี ฉัน n - ความต้านทานเล็กน้อยที่เรียกว่าซึ่งเป็นค่าฐานในการคำนวณโอห์ม
อัตราส่วน
R / ยู n \u003d (ω 0 - ω และ) / ω 0 \u003d δ
สะท้อนคุณสมบัติที่สำคัญของ NV DPT: ความแตกต่างของความเร็วสัมพัทธ์ δ \u003d Δω / ω 0 เท่ากับความต้านทานเชิงแอ็คทีฟสัมพัทธ์ของวงจรกระดอง R / Rน.
มากำหนดกันในรูป 6.4 จุดเด่น เอ, ข,กับ, dและสังเกตว่า ω 0 – ω และ = Δω = ace, ω 0 = โฆษณาแล้ว R = R n Δω / ω 0 = Rน ace/โฆษณา; Rง = Rน ขกับ/โฆษณา; Rผม = Rน เอข /โฆษณา.
จึงจะพบว่า R d ก่อนอื่นคุณต้องกำหนดความยาวของส่วนตามลักษณะ ขกับและ โฆษณาที่พิกัดกระแสหรือแรงบิดและคำนวณความต้านทานพิกัด Rน = ยูไม่มี ฉันน.
การคำนวณตัวต้านทานเพิ่มเติมสามารถทำได้โดยใช้สูตรต่อไปนี้สำหรับกระแสที่อนุญาต ฉันเพิ่มเติมซึ่งกำหนดโดยค่าของช่วงเวลาที่อนุญาต เอ็มเงื่อนไขเพิ่มเติมหรือเงื่อนไขในการสตาร์ท การถอยหลัง และการเบรก
ความต้านทานตัวต้านทาน R d1 ที่จุดเริ่มต้น ( อี = 0)
R q1 = ( ยู / ฉันเพิ่ม) - Rฉัน.
ความต้านทานตัวต้านทาน R d2 ระหว่างการเบรกแบบไดนามิก
R q2 = ( อี / ฉันเพิ่ม) - Rฉัน ≈ ( ยู / ฉันเพิ่ม) - Rฉัน).
ความต้านทานตัวต้านทาน R d3 เมื่อถอยหลังหรือเบรกโดยป้องกันการสลับ
R d3 = (( ยู + อี) / ฉันเพิ่ม) - Rฉัน ≈ (2 ยู / ฉันเพิ่ม) - Rฉัน.
ตัวอย่าง . DPT NV ประเภท PBST-53 มีข้อมูลหนังสือเดินทางดังต่อไปนี้: R n = 4.8 กิโลวัตต์; น n = 1500 รอบต่อนาที; ยู n = 220 V; ฉัน n = 24.2 A; Rผม = 0.38 โอห์ม; ฉัน v.n = 0.8 A. จำเป็นต้องกำหนด:
1) ความต้านทานของตัวต้านทานซึ่งรวมอยู่ในวงจรกระดองมอเตอร์จะช่วยให้มั่นใจได้ว่าลักษณะทางกลประดิษฐ์ผ่านจุดที่มีพิกัด ω และ = 90 rad / s เอ็ม n = 25 Nm;
2) ความต้านทานของตัวต้านทานซึ่งรวมไว้ซึ่งจะ จำกัด กระแสในระหว่างการสตาร์ทและการเบรกโดยตรงกันข้ามกับระดับ ฉันเพิ่ม = 3 ฉันน.