พิจารณาร่างที่แข็งทื่อซึ่งหมุนรอบแกนคงที่ จากนั้นจุดแต่ละจุดของร่างกายนี้จะอธิบายวงกลมที่มีรัศมีต่างกัน ซึ่งจุดศูนย์กลางอยู่บนแกนของการหมุน ให้บางจุดเคลื่อนที่เป็นวงกลมรัศมี R(รูปที่ 6) ตำแหน่งหลังจากช่วงเวลาหนึ่ง tตั้งมุม มุมการหมุนเบื้องต้น (เล็กมาก) ถือเป็นเวกเตอร์ โมดูลของเวกเตอร์ d เท่ากับมุมของการหมุนและทิศทางของมันสอดคล้องกับทิศทางของการเคลื่อนที่เชิงแปลของปลายสกรูซึ่งหัวจะหมุนไปในทิศทางของการเคลื่อนที่ของจุดตามแนววงกลม กล่าวคือ เชื่อฟัง กฎของสกรูขวา(รูปที่ 6) เวกเตอร์ที่มีทิศทางเกี่ยวข้องกับทิศทางการหมุนเรียกว่า ยาหลอกหรือ เวกเตอร์แนวแกนเวกเตอร์เหล่านี้ไม่มีจุดใช้งานเฉพาะ: สามารถวาดจากจุดใดก็ได้บนแกนหมุน
ความเร็วเชิงมุมเรียกว่าปริมาณเวกเตอร์เท่ากับอนุพันธ์อันดับแรกของมุมการหมุนของร่างกายเทียบกับเวลา:
เวกเตอร์ "ใน" ถูกชี้ไปตามแกนของการหมุนตามกฎของสกรูขวา นั่นคือ ในลักษณะเดียวกับเวกเตอร์ d (รูปที่ 7) มิติของความเร็วเชิงมุม dim=T -1 , a . มีหน่วยเป็นเรเดียนต่อวินาที (rad/s)
ความเร็วเชิงเส้นของจุด (ดูรูปที่ 6)
ในรูปเวกเตอร์ สูตรสำหรับ ความเร็วเชิงเส้นสามารถเขียนเป็นผลิตภัณฑ์เวกเตอร์:
ในกรณีนี้ โมดูลของผลิตภัณฑ์เวกเตอร์ ตามคำนิยาม เท่ากับ ![]()
และทิศทางก็เหมือนกัน กับทิศทางการเคลื่อนที่แปลของสกรูขวาระหว่างการหมุนจาก ถึง R
ถ้า =const การหมุนจะสม่ำเสมอและสามารถระบุได้ ระยะเวลาหมุนเวียนตู่- เวลาที่จุดนั้นทำการหมุนครบหนึ่งครั้ง กล่าวคือ หมุนเป็นมุม 2 เนื่องจากช่วงเวลา t=T สอดคล้องกับ =2 ดังนั้น = 2/T ดังนั้น
![]()
เรียกว่าจำนวนรอบที่สมบูรณ์ของร่างกายในระหว่างการเคลื่อนไหวสม่ำเสมอในวงกลม ต่อหน่วยเวลาเรียกว่า ความเร็ว:
ความเร่งเชิงมุมเรียกว่าปริมาณเวกเตอร์เท่ากับอนุพันธ์อันดับหนึ่งของความเร็วเชิงมุมเทียบกับเวลา:
เมื่อวัตถุหมุนรอบแกนคงที่ เวกเตอร์ความเร่งเชิงมุมจะมุ่งไปตามแกนการหมุนไปยังเวกเตอร์ของการเพิ่มความเร็วเบื้องต้นของความเร็วเชิงมุม ด้วยการเคลื่อนไหวที่รวดเร็ว เวกเตอร์
กำกับร่วมไปยังเวกเตอร์ (รูปที่ 8) โดยมีการเคลื่อนไหวช้า - ตรงข้ามกับมัน (รูปที่ 9)
องค์ประกอบสัมผัสของการเร่งความเร็ว
องค์ประกอบปกติของการเร่งความเร็ว
ดังนั้น ความสัมพันธ์ระหว่างเส้นตรง (ความยาวของเส้นทางที่เดินทางโดยจุดหนึ่งไปตามส่วนโค้งของวงกลมรัศมี อาร์ความเร็วสาย วีความเร่งในแนวสัมผัส a ความเร่งปกติ a น) และค่าเชิงมุม (มุมการหมุน , ความเร็วเชิงมุม (o, ความเร่งเชิงมุม) แสดงโดยสูตรต่อไปนี้:
ในกรณีของการเคลื่อนที่ของจุดตามแนววงกลมเท่าๆ กัน (=const)
โดยที่ 0 - ความเร็วเชิงมุมเริ่มต้น
คำถามทดสอบ
เรียกว่าอะไร จุดวัสดุ? เหตุใดจึงมีการนำแบบจำลองดังกล่าวมาใช้ในกลไก
ระบบอ้างอิงคืออะไร?
เวกเตอร์การกระจัดคืออะไร? โมดูลัสของเวกเตอร์การกระจัดเท่ากับส่วนของเส้นทางเสมอหรือไม่
ผ่านจุด?
การเคลื่อนไหวแบบไหนที่ก้าวหน้า? หมุน?
ให้คำจำกัดความของเวกเตอร์ของความเร็วเฉลี่ยและความเร่งเฉลี่ย ความเร็วชั่วขณะ
และการเร่งความเร็วทันที ทิศทางของพวกเขาคืออะไร?
องค์ประกอบสัมผัสของการเร่งความเร็วคืออะไร? องค์ประกอบปกติ
อัตราเร่ง? โมดูลของพวกเขาคืออะไร?
เป็นการเคลื่อนไหวที่เป็นไปได้ที่ไม่มี อัตราเร่งปกติ? สัมผัส
อัตราเร่ง? ยกตัวอย่าง.
เรียกว่าอะไร ความเร็วเชิงมุม? อัตราเร่งเชิงมุม? มีการกำหนดทิศทางอย่างไร?
ความสัมพันธ์ระหว่างปริมาณเชิงเส้นและเชิงมุมคืออะไร?
งาน
1.1. การพึ่งพาเส้นทางที่ร่างกายเดินทางตรงเวลานั้นถูกกำหนดโดยสมการ s = อา+วีt+Ct 2 + Dt 3 (จาก\u003d 0.1 ม. / วินาที 2, ดี= 0.03 เมตร/วินาที 3). กำหนด: 1) หลังจากเวลาใดหลังจากเริ่มเคลื่อนไหวความเร่ง a ของร่างกายจะเท่ากับ 2 m / s 2; 2) อัตราเร่งเฉลี่ย<а>ร่างกายในช่วงเวลานี้ (1) 10 วินาที; 2) 1.1 ม./วินาที 2 ]
1.2. ละเลยแรงต้านของอากาศ ให้กำหนดมุมที่ลำตัวถูกเหวี่ยงไปที่ขอบฟ้า หากความสูงสูงสุดของลำตัวเท่ากับ 1/4 ของระยะการบิน
1.3. รัศมีวงล้อ R= 0.1 เมตรหมุนเพื่อให้การพึ่งพาความเร็วเชิงมุมตรงเวลาถูกกำหนดโดยสมการ = 2At+5Вt 4 (A=2 rad/s 2 และ B=1 rad/s 5) กำหนดอัตราเร่งรวมของจุดขอบล้อผ่าน t= 1 วินาทีหลังจากเริ่มการหมุนและจำนวนรอบของล้อในช่วงเวลานี้ [a \u003d 8.5 m / s 2; ยังไม่มีข้อความ=0.48]
1.4. ความเร่งปกติของจุดที่เคลื่อนที่ไปตามวงกลมรัศมี r = 4 m ได้จากสมการ เอ น =A+-Bt+Ct 2 (อา\u003d 1 ม. / วินาที 2, ที่\u003d 6 ม. / วินาที 3 จาก=3 เมตร/วินาที 4). กำหนด: 1) ความเร่งในแนวสัมผัสของจุด; 2) เส้นทางที่เดินทางโดยจุดในเวลา t 1 =5 s หลังจากเริ่มการเคลื่อนไหว 3) ความเร่งรวมสำหรับเวลา t 2 =1 s [ 1) 6 เมตร/วินาที 2 ; 2) 85 ม. 3) 6.32 ม./วินาที2]
1.5. ความถี่การหมุนของล้อที่การเคลื่อนไหวช้าสม่ำเสมอสำหรับ t=1 นาที ลดลงจาก 300 เป็น 180 นาที -1 กำหนด: 1) ความเร่งเชิงมุมของล้อ; 2) จำนวนรอบที่สมบูรณ์ที่ทำโดยวงล้อในช่วงเวลานี้
1.6. ดิสก์ที่มีรัศมี R=10 ซม. หมุนรอบแกนคงที่เพื่อให้การพึ่งพาของมุมการหมุนของรัศมีดิสก์ตรงเวลาถูกกำหนดโดยสมการ = อา+Bt+Ct 2 +Dt 3 (บี= ล. rad/s, จาก=1 rad/s 2 , ดี\u003d l rad / s 3). กำหนดจุดบนขอบล้อเมื่อสิ้นสุดวินาทีที่สองหลังจากเริ่มการเคลื่อนไหว: 1) ความเร่งในแนวสัมผัส a ; 2) อัตราเร่งปกติ a น; 3) อัตราเร่งเต็มที่ [ 1) 0.14 ม./วินาที 2 ; 2) 28.9 m / s 2; 3) 28.9 ม./วินาที2]
ความยาวและระยะทาง มวล การวัดปริมาตรของผลิตภัณฑ์จำนวนมากและอาหาร พื้นที่ ปริมาณและหน่วยของการวัดในสูตรการทำอาหาร อุณหภูมิ ความดัน ความเครียดทางกล โมดูลัสของ Young พลังงานและการทำงาน พลังงาน เวลา แรง ความเร็วเชิงเส้น ความเร็ว มุมแบน ประสิทธิภาพเชิงความร้อนและประสิทธิภาพเชื้อเพลิง ตัวเลข หน่วยของการวัด ปริมาณของข้อมูล อัตราแลกเปลี่ยน ขนาด เสื้อผ้าและรองเท้าของผู้หญิง ขนาดของเสื้อผ้าและรองเท้าของผู้ชาย ความเร็วเชิงมุมและความเร็วในการหมุน การเร่ง ความเร่งเชิงมุม ความหนาแน่น ปริมาตรจำเพาะ โมเมนต์ของความเฉื่อย โมเมนต์ของแรง แรงบิด ค่าความร้อนจำเพาะ (โดยมวล) ความหนาแน่นของพลังงานและค่าความร้อนจำเพาะของเชื้อเพลิง ( โดยปริมาตร) ความแตกต่างของอุณหภูมิ ค่าสัมประสิทธิ์การขยายตัวทางความร้อน ความต้านทานความร้อน การนำความร้อน ความจุความร้อนจำเพาะ การเปิดรับพลังงาน พลังงานรังสีความร้อน ความหนาแน่นของฟลักซ์ความร้อน ค่าสัมประสิทธิ์การถ่ายเทความร้อน การไหลของปริมาตร การไหลของมวล การไหลของโมลาร์ ความหนาแน่นของการไหลของมวล ความเข้มข้นของโมลาร์ มวล k ความเข้มข้นในสารละลาย ความหนืดไดนามิก (สัมบูรณ์) ความหนืดจลน์ แรงตึงผิว การซึมผ่านของไอน้ำ การซึมผ่านของไอ อัตราการถ่ายโอนไอ ระดับเสียง ความไวของไมโครโฟน ระดับความดันเสียง (SPL) ความสว่าง ความเข้มของแสง การส่องสว่าง ความละเอียดในคอมพิวเตอร์กราฟิก ความถี่และความยาวคลื่น พลังงานแสงในไดออปเตอร์และความยาวโฟกัส ออปติคัล กำลังขยายไดออปเตอร์และเลนส์ (×) ค่าไฟฟ้าความหนาแน่นของประจุเชิงเส้น ความหนาแน่นของประจุที่พื้นผิว ความหนาแน่นของประจุจำนวนมาก ไฟฟ้าความหนาแน่นกระแสเชิงเส้น ความหนาแน่นกระแสพื้นผิว ความแข็งแรง สนามไฟฟ้าศักย์ไฟฟ้าสถิตและแรงดันไฟฟ้า ความต้านทานไฟฟ้า จำเพาะ ความต้านทานไฟฟ้าการนำไฟฟ้า การนำไฟฟ้า ความจุไฟฟ้าตัวเหนี่ยวนำ American wire gauge ระดับเป็น dBm (dBm หรือ dBm), dBV (dBV), watts ฯลฯ หน่วย Magnetomotive force Strength สนามแม่เหล็กฟลักซ์แม่เหล็ก การเหนี่ยวนำแม่เหล็ก อัตราการดูดซึมของรังสีไอออไนซ์ กัมมันตภาพรังสี การสลายตัวของกัมมันตภาพรังสี ปริมาณรังสีที่ได้รับ ปริมาณการดูดซึม คำนำหน้าทศนิยม การสื่อสารข้อมูล การพิมพ์และการถ่ายภาพ หน่วยปริมาตรไม้ การคำนวณมวลโมลาร์ ระบบเป็นระยะ องค์ประกอบทางเคมีดี ไอ เมนเดเลเยฟ
1 รอบต่อนาที [rpm] = 0.10471975511966 เรเดียนต่อวินาที [rad/s]
ค่าเริ่มต้น
มูลค่าแปลง
เรเดียนต่อวินาที เรเดียนต่อวัน เรเดียนต่อชั่วโมง เรเดียนต่อนาที องศาต่อวัน องศาต่อชั่วโมง องศาต่อนาที องศาต่อวินาที รอบต่อวัน รอบต่อนาที รอบต่อนาที รอบต่อนาที รอบต่อนาที รอบต่อปี รอบต่อเดือน รอบต่อสัปดาห์ องศาต่อปี องศาต่อ องศาเดือนต่อสัปดาห์ เรเดียนต่อปี เรเดียนต่อเดือน เรเดียนต่อสัปดาห์
บทความเด่น
เพิ่มเติมเกี่ยวกับความเร็วเชิงมุม

ข้อมูลทั่วไป
ความเร็วเชิงมุมเป็นปริมาณเวกเตอร์ที่กำหนดความเร็วของการหมุนของวัตถุที่สัมพันธ์กับแกนของการหมุน เวกเตอร์นี้ตั้งฉากกับระนาบการหมุนและกำหนดโดยใช้กฎวงแหวน ความเร็วเชิงมุมวัดเป็นอัตราส่วนระหว่างมุมที่วัตถุเคลื่อนที่ กล่าวคือ การกระจัดเชิงมุม และเวลาที่ใช้ไปกับวัตถุ ในระบบ SI ความเร่งเชิงมุมวัดเป็นเรเดียนต่อวินาที
ความเร็วเชิงมุมในกีฬา
ความเร็วเชิงมุมมักใช้ในการเล่นกีฬา ตัวอย่างเช่น นักกีฬาลดหรือเพิ่มความเร็วเชิงมุมของไม้กอล์ฟ ไม้ตี หรือแร็กเก็ตเพื่อปรับปรุงประสิทธิภาพ ความเร็วเชิงมุมสัมพันธ์กับความเร็วเชิงเส้น ดังนั้นจุดทั้งหมดบนเซกเมนต์ที่หมุนรอบจุดบนส่วนนี้ นั่นคือ รอบจุดศูนย์กลางของการหมุน จุดที่ไกลที่สุดจากจุดศูนย์กลางนี้จะเคลื่อนที่ด้วยความเร็วเชิงเส้นสูงสุด ตัวอย่างเช่น หากไม้กอล์ฟกำลังหมุน ส่วนปลายของไม้นั้นที่อยู่ไกลจากจุดศูนย์กลางของการหมุนจะเคลื่อนที่ด้วยความเร็วเชิงเส้นสูงสุด ในเวลาเดียวกัน จุดทั้งหมดในส่วนนี้เคลื่อนที่ด้วยความเร็วเชิงมุมเท่ากัน ดังนั้นการยืดไม้ให้ยาว ไม้ตี หรือแร็กเกต นักกีฬายังเพิ่มความเร็วเชิงเส้นและตามความเร็วของการกระแทกที่ส่งไปยังลูกบอลเพื่อให้สามารถบินได้ ระยะทางมากขึ้น. การย่อแร็กเกตหรือไม้กอล์ฟให้สั้นลง ในทางกลับกัน การสกัดกั้นได้ต่ำกว่าปกติ จะทำให้ความเร็วของการกระแทกช้าลง


คนสูงที่มีแขนขายาวมีความได้เปรียบในแง่ของความเร็วเชิงเส้น นั่นคือการขยับขาด้วยความเร็วเชิงมุมเท่ากัน พวกมันจะขยับเท้าด้วยความเร็วเชิงเส้นที่สูงขึ้น สิ่งเดียวกันเกิดขึ้นด้วยมือของพวกเขา ข้อดีนี้อาจเป็นหนึ่งในสาเหตุที่ทำให้ สังคมดึกดำบรรพ์ผู้ชายล่ามากกว่าผู้หญิง มีแนวโน้มว่าด้วยเหตุนี้ คนตัวสูงจึงได้รับประโยชน์ในกระบวนการวิวัฒนาการเช่นกัน แขนขายาวไม่เพียงช่วยในการวิ่งเท่านั้น แต่ยังช่วยในระหว่างการล่าสัตว์ด้วย - แขนยาวขว้างหอกและก้อนหินด้วยความเร็วเชิงเส้นที่มากขึ้น ในทางกลับกัน แขนยาวและขาอาจทำให้ไม่สะดวก แขนขายาวมี น้ำหนักมากขึ้นและพวกเขาต้องการพลังงานมากขึ้นในการเคลื่อนย้าย นอกจากนี้ เมื่อคนวิ่งเร็ว ขายาวจะเคลื่อนที่เร็วขึ้น ซึ่งหมายความว่าเมื่อชนกับสิ่งกีดขวาง แรงกระแทกจะแรงกว่าคนขาสั้นที่เคลื่อนที่ด้วยความเร็วเชิงเส้นเท่ากัน
ยิมนาสติก สเก็ตลีลา และดำน้ำก็ใช้ความเร็วเชิงมุมเช่นกัน หากนักกีฬารู้ความเร็วเชิงมุม ก็จะง่ายต่อการคำนวณจำนวนการพลิกตัวและการแสดงผาดโผนอื่นๆ ในระหว่างการกระโดด ในระหว่างการตีลังกา นักกีฬามักจะเก็บขาและแขนไว้ใกล้กับร่างกายมากที่สุดเพื่อลดความเฉื่อยและเพิ่มอัตราเร่ง และทำให้ความเร็วเชิงมุมลดลง ในทางกลับกัน ขณะดำน้ำหรือร่อนลง ผู้ตัดสินจะดูว่านักกีฬาลงตรงหรือไม่ บน ความเร็วสูงเป็นการยากที่จะควบคุมทิศทางของการบิน ดังนั้นนักกีฬาจึงจงใจชะลอความเร็วเชิงมุมโดยเหยียดแขนและขาออกจากร่างกายเล็กน้อย
นักกีฬาที่ขว้างจักรหรือค้อนก็ควบคุมความเร็วเชิงเส้นด้วยความช่วยเหลือของมุม หากคุณเพียงแค่ขว้างค้อนโดยไม่หมุนเป็นวงกลมบนลวดเหล็กยาวที่เพิ่มความเร็วเชิงเส้น การขว้างจะไม่แรงมาก ดังนั้นค้อนจะหมุนก่อน นักกีฬาโอลิมปิกหมุนรอบแกนของพวกเขาสามถึงสี่ครั้งเพื่อเพิ่มความเร็วเชิงมุมให้สูงสุด
ความเร็วเชิงมุมและการจัดเก็บข้อมูลบนสื่อออปติคัล

ขณะเขียนข้อมูลไปยัง สื่อแสงตัวอย่างเช่น ในคอมแพคดิสก์ (CD) ความเร็วเชิงมุมและเชิงเส้นยังใช้เพื่อวัดความเร็วในการเขียนและอ่านข้อมูลในไดรฟ์ มีหลายวิธีในการบันทึกข้อมูล ซึ่งในระหว่างนั้นจะใช้ความเร็วเชิงเส้นหรือเชิงมุมที่แปรผันหรือคงที่ ตัวอย่างเช่น โหมด ความเร็วเชิงเส้นคงที่(เป็นภาษาอังกฤษ - Constant Linear Velocity หรือ CVL) - หนึ่งในวิธีการหลักในการบันทึกดิสก์ ซึ่งข้อมูลจะถูกเขียนด้วยความเร็วเท่ากันทั่วทั้งพื้นผิวของแผ่นดิสก์ ระหว่างการบันทึกใน ความเร็วเชิงเส้นคงที่เป็นโซน(เป็นภาษาอังกฤษ - Zone Constant Linear Velocity หรือ ZCLV) ความเร็วคงที่จะถูกคงไว้ในระหว่างการบันทึกในบางส่วน เช่น โซนของดิสก์ ในกรณีนี้ แผ่นดิสก์จะช้าลงขณะบันทึกที่โซนด้านนอก โหมด ความเร็วเชิงมุมคงตัวบางส่วน(ความเร็วเชิงมุมบางส่วนคงที่หรือ PCAV) ช่วยให้คุณสามารถบันทึกด้วยความเร็วเชิงมุมที่เพิ่มขึ้นทีละน้อยจนกว่าจะถึงเกณฑ์ที่กำหนด หลังจากนั้นความเร็วเชิงมุมจะคงที่ โหมดบันทึกล่าสุด - โหมด ความเร็วเชิงมุมคงที่(ความเร็วเชิงมุมคงที่หรือ CAV) ในโหมดนี้ ระหว่างการบันทึก ความเร็วเชิงมุมเท่าเดิมจะคงอยู่เหนือพื้นผิวทั้งหมดของแผ่นดิสก์ ในกรณีนี้ ความเร็วเชิงเส้นจะเพิ่มขึ้นเมื่อหัวบันทึกเคลื่อนไปข้างหน้าเรื่อยๆ จนถึงขอบของแผ่นดิสก์ โหมดนี้ยังใช้เมื่อบันทึกบันทึกและฮาร์ดไดรฟ์ของคอมพิวเตอร์
ความเร็วเชิงมุมในอวกาศ
ที่ระยะทาง 35,786 กิโลเมตร (22,236 ไมล์) จากโลก มีวงโคจรที่ดาวเทียมหมุนอยู่ นี่เป็นวงโคจรพิเศษเนื่องจากวัตถุโคจรไปในทิศทางเดียวกับที่โลกโคจรรอบแกนทั้งหมดในเวลาเดียวกับที่โลกใช้ทำให้วงกลมเต็มรอบแกนของมัน นี่น้อยกว่า 24 ชั่วโมงเล็กน้อย นั่นคือวันดาวฤกษ์หนึ่งวัน เนื่องจากความเร็วเชิงมุมของการหมุนของวัตถุในวงโคจรนี้เท่ากับความเร็วเชิงมุมของการหมุนของโลก ดูเหมือนว่าผู้สังเกตการณ์จากโลกจะไม่เคลื่อนที่ วงโคจรดังกล่าวเรียกว่า ค้างฟ้า.
วงโคจรนี้มักจะเปิดตัวโดยดาวเทียมที่ติดตามการเปลี่ยนแปลงของสภาพอากาศ (ดาวเทียมอุตุนิยมวิทยา) ดาวเทียมที่ตรวจสอบการเปลี่ยนแปลงในมหาสมุทร และดาวเทียมสื่อสารที่ให้บริการออกอากาศทางโทรทัศน์และวิทยุ การสื่อสารทางโทรศัพท์ และอินเทอร์เน็ตผ่านดาวเทียม วงโคจรของ geostationary มักใช้สำหรับดาวเทียมเนื่องจากเสาอากาศที่เคยชี้ไปที่ดาวเทียมแล้วไม่จำเป็นต้องชี้อีก ในทางกลับกัน ความไม่สะดวกดังกล่าวเกี่ยวข้องกับการใช้งาน เช่น จำเป็นต้องมีมุมมองโดยตรงระหว่างเสาอากาศกับดาวเทียม นอกจากนี้ วงโคจรของ geostationary นั้นอยู่ไกลจากโลก และจำเป็นต้องใช้เครื่องส่งที่ทรงพลังกว่าในการส่งสัญญาณมากกว่าที่ใช้ในการส่งสัญญาณจากวงโคจรที่ต่ำกว่า สัญญาณมาถึงด้วยความล่าช้าประมาณ 0.25 วินาทีซึ่งผู้ใช้จะสังเกตเห็นได้ชัดเจน ตัวอย่างเช่น ในระหว่างการออกอากาศข่าว ผู้สื่อข่าวในพื้นที่ห่างไกลมักจะติดต่อสตูดิโอผ่านลิงก์ดาวเทียม ในเวลาเดียวกัน เป็นที่สังเกตได้ว่าเมื่อผู้นำเสนอทีวีถามคำถามพวกเขาจะตอบด้วยความล่าช้า อย่างไรก็ตามเรื่องนี้ ดาวเทียมในวงโคจรค้างฟ้ายังถูกใช้อย่างแพร่หลาย ตัวอย่างเช่น จนกระทั่งเมื่อไม่นานมานี้ การสื่อสารระหว่างทวีปต่างๆ ได้ดำเนินการโดยใช้ดาวเทียมเป็นหลัก ตอนนี้ส่วนใหญ่ถูกแทนที่ด้วยสายเคเบิลข้ามทวีปที่วิ่งไปตามพื้นมหาสมุทร อย่างไรก็ตามการสื่อสารผ่านดาวเทียมยังคงใช้ในพื้นที่ห่างไกล ในช่วงยี่สิบปีที่ผ่านมา ดาวเทียมสื่อสารได้ให้การเข้าถึงอินเทอร์เน็ตด้วย โดยเฉพาะอย่างยิ่งในพื้นที่ห่างไกลที่ไม่มีโครงสร้างพื้นฐานด้านการสื่อสารภาคพื้นดิน

อายุการใช้งานของดาวเทียมส่วนใหญ่จะพิจารณาจากปริมาณเชื้อเพลิงบนเรือที่จำเป็นสำหรับการแก้ไขวงโคจรเป็นระยะ ปริมาณเชื้อเพลิงในดาวเทียมมีจำกัด ดังนั้นเมื่อน้ำมันหมด ดาวเทียมจะถูกปลดประจำการ ส่วนใหญ่มักจะถูกย้ายไปยังวงโคจรของสุสานนั่นคือวงโคจรที่สูงกว่า geostationary มาก นี่เป็นกระบวนการที่มีราคาแพง อย่างไรก็ตาม หากปล่อยดาวเทียมที่ไม่จำเป็นไว้ในวงโคจร geostationary สิ่งนี้คุกคามความเป็นไปได้ที่จะชนกับดาวเทียมดวงอื่น พื้นที่ในวงโคจร geostationary มีจำกัด ดังนั้นดาวเทียมเก่าที่เหลืออยู่ในวงโคจรจะใช้พื้นที่ที่ดาวเทียมใหม่สามารถใช้ได้ ในเรื่องนี้ ในหลายประเทศมีข้อบังคับที่กำหนดให้เจ้าของดาวเทียมต้องลงนามในข้อตกลงว่าเมื่อสิ้นสุดการทำงาน ดาวเทียมจะถูกวางลงในวงโคจรของสุสาน
บทความตัวแปลงหน่วยได้รับการแก้ไขและแสดงโดย Anatoly Zolotkov
คุณพบว่าการแปลหน่วยการวัดจากภาษาหนึ่งเป็นอีกภาษาหนึ่งเป็นเรื่องยากหรือไม่ เพื่อนร่วมงานพร้อมที่จะช่วยเหลือคุณ โพสต์คำถามไปที่ TCTermsและภายในไม่กี่นาทีคุณจะได้รับคำตอบ
การคำนวณสำหรับการแปลงหน่วยในตัวแปลง " ความเร็วเชิงมุมและความเร็วในการหมุน' ดำเนินการโดยใช้ฟังก์ชันของ unitconversion.org
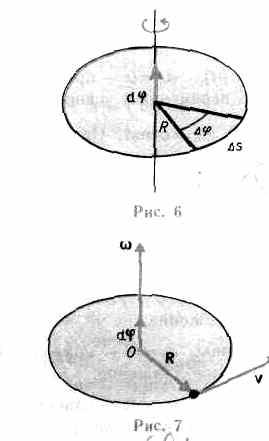
พิจารณาร่างที่แข็งทื่อซึ่งหมุนรอบแกนคงที่ จากนั้นจุดแต่ละจุดของร่างกายนี้จะอธิบายวงกลมที่มีรัศมีต่างกัน ซึ่งจุดศูนย์กลางอยู่บนแกนของการหมุน ให้บางจุดเคลื่อนที่เป็นวงกลมรัศมี R(รูปที่ 6) ตำแหน่งหลังจากช่วงเวลาหนึ่ง tตั้งมุม มุมการหมุนเบื้องต้น (เล็กมาก) ถือเป็นเวกเตอร์ โมดูลของเวกเตอร์ d เท่ากับมุมของการหมุนและทิศทางของมันสอดคล้องกับทิศทางของการเคลื่อนที่เชิงแปลของปลายสกรูซึ่งหัวจะหมุนไปในทิศทางของการเคลื่อนที่ของจุดตามแนววงกลม กล่าวคือ เชื่อฟัง กฎของสกรูขวา(รูปที่ 6) เวกเตอร์ที่มีทิศทางเกี่ยวข้องกับทิศทางการหมุนเรียกว่า ยาหลอกหรือ เวกเตอร์แนวแกนเวกเตอร์เหล่านี้ไม่มีจุดใช้งานเฉพาะ: สามารถวาดจากจุดใดก็ได้บนแกนหมุน
ความเร็วเชิงมุมเรียกว่าปริมาณเวกเตอร์เท่ากับอนุพันธ์อันดับแรกของมุมการหมุนของร่างกายเทียบกับเวลา:
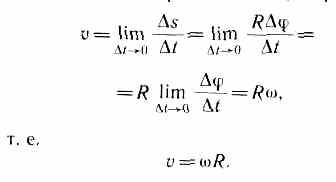
เวกเตอร์ "ใน" ถูกชี้ไปตามแกนของการหมุนตามกฎของสกรูขวา นั่นคือ ในลักษณะเดียวกับเวกเตอร์ d (รูปที่ 7) มิติของความเร็วเชิงมุม dim=T -1 , a . มีหน่วยเป็นเรเดียนต่อวินาที (rad/s)
ความเร็วเชิงเส้นของจุด (ดูรูปที่ 6)
ในรูปแบบเวกเตอร์ สูตรสำหรับความเร็วเชิงเส้นสามารถเขียนเป็นผลคูณไขว้ได้:
ในกรณีนี้ โมดูลของผลิตภัณฑ์เวกเตอร์ ตามคำนิยาม เท่ากับ ![]()
และทิศทางก็เหมือนกัน กับทิศทางการเคลื่อนที่แปลของสกรูขวาระหว่างการหมุนจาก ถึง R
ถ้า =const การหมุนจะสม่ำเสมอและสามารถระบุได้ ระยะเวลาหมุนเวียนตู่- เวลาที่จุดนั้นทำการหมุนครบหนึ่งครั้ง กล่าวคือ หมุนเป็นมุม 2 เนื่องจากช่วงเวลา t=T สอดคล้องกับ =2 ดังนั้น = 2/T ดังนั้น
![]()
เรียกว่าจำนวนรอบที่สมบูรณ์ของร่างกายในระหว่างการเคลื่อนไหวสม่ำเสมอในวงกลม ต่อหน่วยเวลาเรียกว่า ความเร็ว:
ความเร่งเชิงมุมเรียกว่าปริมาณเวกเตอร์เท่ากับอนุพันธ์อันดับหนึ่งของความเร็วเชิงมุมเทียบกับเวลา:
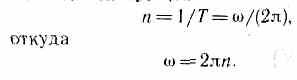
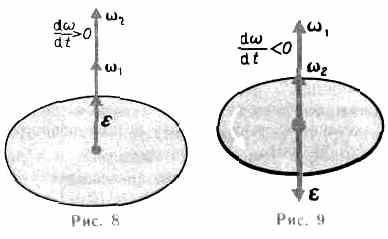
เมื่อวัตถุหมุนรอบแกนคงที่ เวกเตอร์ความเร่งเชิงมุมจะมุ่งไปตามแกนการหมุนไปยังเวกเตอร์ของการเพิ่มความเร็วเบื้องต้นของความเร็วเชิงมุม ด้วยการเคลื่อนไหวที่รวดเร็ว เวกเตอร์
กำกับร่วมไปยังเวกเตอร์ (รูปที่ 8) โดยมีการเคลื่อนไหวช้า - ตรงข้ามกับมัน (รูปที่ 9)
องค์ประกอบสัมผัสของการเร่งความเร็ว
องค์ประกอบปกติของการเร่งความเร็ว
ดังนั้น ความสัมพันธ์ระหว่างเส้นตรง (ความยาวของเส้นทางที่เดินทางโดยจุดหนึ่งไปตามส่วนโค้งของวงกลมรัศมี อาร์ความเร็วสาย วีความเร่งในแนวสัมผัส a ความเร่งปกติ a น) และปริมาณเชิงมุม (มุมของการหมุน , ความเร็วเชิงมุม (o, ความเร่งเชิงมุม ) แสดงโดยสูตรต่อไปนี้:
ในกรณีของการเคลื่อนที่ของจุดตามแนววงกลมเท่าๆ กัน (=const)
โดยที่ 0 - ความเร็วเชิงมุมเริ่มต้น
คำถามทดสอบ
จุดวัสดุคืออะไร? เหตุใดจึงมีการนำแบบจำลองดังกล่าวมาใช้ในกลไก
ระบบอ้างอิงคืออะไร?
เวกเตอร์การกระจัดคืออะไร? โมดูลัสของเวกเตอร์การกระจัดเท่ากับส่วนของเส้นทางเสมอหรือไม่
ผ่านจุด?
การเคลื่อนไหวแบบไหนที่ก้าวหน้า? หมุน?
ให้คำจำกัดความของเวกเตอร์ของความเร็วเฉลี่ยและความเร่งเฉลี่ย ความเร็วชั่วขณะ
และการเร่งความเร็วทันที ทิศทางของพวกเขาคืออะไร?
องค์ประกอบสัมผัสของการเร่งความเร็วคืออะไร? องค์ประกอบปกติ
อัตราเร่ง? โมดูลของพวกเขาคืออะไร?
การเคลื่อนไหวที่ไม่มีการเร่งความเร็วปกติเป็นไปได้หรือไม่? สัมผัส
อัตราเร่ง? ยกตัวอย่าง.
อะไรเรียกว่าความเร็วเชิงมุม? อัตราเร่งเชิงมุม? มีการกำหนดทิศทางอย่างไร?
ความสัมพันธ์ระหว่างปริมาณเชิงเส้นและเชิงมุมคืออะไร?
งาน
1.1. การพึ่งพาเส้นทางที่ร่างกายเดินทางตรงเวลานั้นถูกกำหนดโดยสมการ s = อา+วีt+Ct 2 + Dt 3 (จาก\u003d 0.1 ม. / วินาที 2, ดี= 0.03 เมตร/วินาที 3). กำหนด: 1) หลังจากเวลาใดหลังจากเริ่มเคลื่อนไหวความเร่ง a ของร่างกายจะเท่ากับ 2 m / s 2; 2) อัตราเร่งเฉลี่ย<а>ร่างกายในช่วงเวลานี้ (1) 10 วินาที; 2) 1.1 ม./วินาที 2 ]
1.2. ละเลยแรงต้านของอากาศ ให้กำหนดมุมที่ลำตัวถูกเหวี่ยงไปที่ขอบฟ้า หากความสูงสูงสุดของลำตัวเท่ากับ 1/4 ของระยะการบิน
1.3. รัศมีวงล้อ R= 0.1 เมตรหมุนเพื่อให้การพึ่งพาความเร็วเชิงมุมตรงเวลาถูกกำหนดโดยสมการ = 2At+5Вt 4 (A=2 rad/s 2 และ B=1 rad/s 5) กำหนดอัตราเร่งรวมของจุดขอบล้อผ่าน t= 1 วินาทีหลังจากเริ่มการหมุนและจำนวนรอบของล้อในช่วงเวลานี้ [a \u003d 8.5 m / s 2; ยังไม่มีข้อความ=0.48]
1.4. ความเร่งปกติของจุดที่เคลื่อนที่ไปตามวงกลมรัศมี r = 4 m ได้จากสมการ เอ น =A+-Bt+Ct 2 (อา\u003d 1 ม. / วินาที 2, ที่\u003d 6 ม. / วินาที 3 จาก=3 เมตร/วินาที 4). กำหนด: 1) ความเร่งในแนวสัมผัสของจุด; 2) เส้นทางที่เดินทางโดยจุดในเวลา t 1 =5 s หลังจากเริ่มการเคลื่อนไหว 3) ความเร่งรวมสำหรับเวลา t 2 =1 s [ 1) 6 เมตร/วินาที 2 ; 2) 85 ม. 3) 6.32 ม./วินาที2]
1.5. ความถี่การหมุนของล้อที่การเคลื่อนไหวช้าสม่ำเสมอสำหรับ t=1 นาที ลดลงจาก 300 เป็น 180 นาที -1 กำหนด: 1) ความเร่งเชิงมุมของล้อ; 2) จำนวนรอบที่สมบูรณ์ที่ทำโดยวงล้อในช่วงเวลานี้
1.6. ดิสก์ที่มีรัศมี R=10 ซม. หมุนรอบแกนคงที่เพื่อให้การพึ่งพาของมุมการหมุนของรัศมีดิสก์ตรงเวลาถูกกำหนดโดยสมการ = อา+Bt+Ct 2 +Dt 3 (บี= ล. rad/s, จาก=1 rad/s 2 , ดี\u003d l rad / s 3). กำหนดจุดบนขอบล้อเมื่อสิ้นสุดวินาทีที่สองหลังจากเริ่มการเคลื่อนไหว: 1) ความเร่งในแนวสัมผัส a ; 2) อัตราเร่งปกติ a น; 3) อัตราเร่งเต็มที่ [ 1) 0.14 ม./วินาที 2 ; 2) 28.9 m / s 2; 3) 28.9 ม./วินาที2]