Виберемо двомірну систему координат X,Y і сумісний її початок зі становищем снаряда перед пострілом. Зобразимо траєкторію руху снаряда кривої ВВ і припустимо, що снаряд через три секунди польоту знаходиться в точці В. Оскільки рух снаряда відбувається з постійним прискоренням g, що повідомляється силою тяжіння, і початкова швидкість снаряда V 0 не дорівнює нулю, то закони кінематики мають бути записані так:
 ,
(1)
,
(1)
У проекціях на осі координат рівняння (1) мають вигляд:
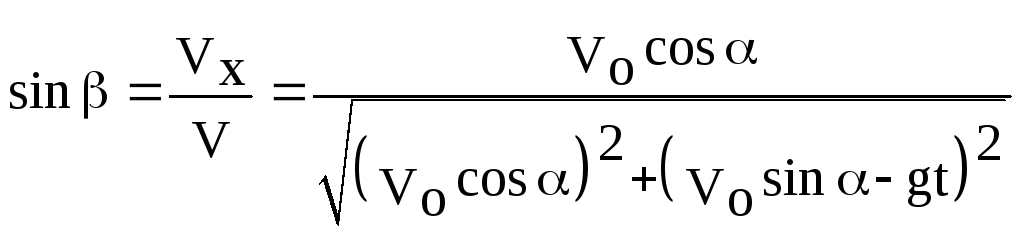
Величини V 0 cosα; іV 0 sinα дорівнюють проекціям початкової швидкості на осі Х і Y, відповідно. З ортогональності проекцій V x і V y випливає:
З креслення видно, що векторні проекції переміщення Sна осі координат рівні горизонтальномуLі вертикальномуHпереміщенню снаряда:S X =LіS Y =H, тому
 (3)
(3)
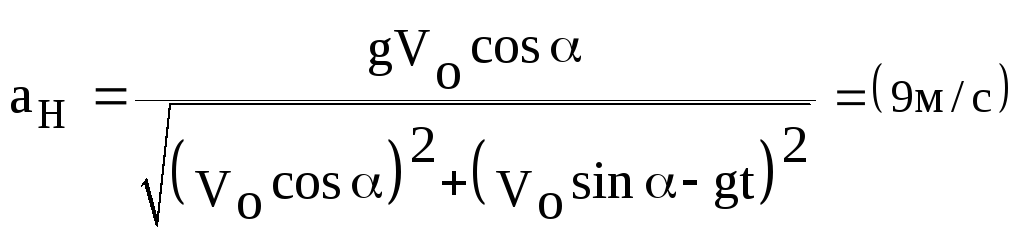
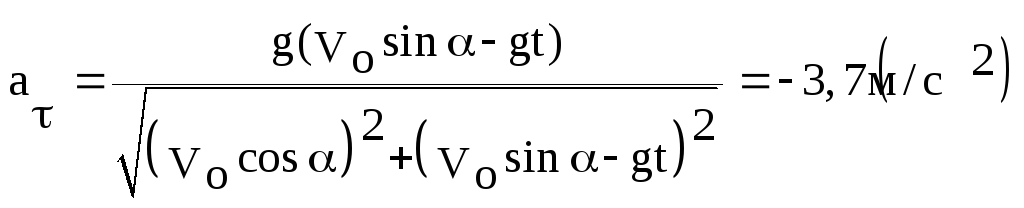
Розкладаючи прискорення снаряда gу точці В на напрямки дотичної та нормалі до траєкторії, відзначимо її нормальну аН та тангенціальну аτ складові. З креслення видно, що
а н = g sinβ, α = g cosβ, (5)
β– кут між вертикаллю і нормаллю до траєкторії в точці В. У паралелограмах швидкостей і прискорень є рівні кути (як кути з перпендикулярними сторонами).
Тригонометричні функції кута можна знайти з розкладання швидкості снаряда в точці В:
 ,
,
 .
.
Підставляючи у співвідношення (5) вирази для тригонометричних функцій маємо остаточно:
 ,
,
 .
.
Переміщення снаряда по горизонталі та його висоту знаходимо за формулами (3) та (4):
 ,
,
 ,L
,L  .
.
За допомогою співвідношення (2) знайдемо величину швидкості снаряда після трьох секунд польоту:
Зауваження. Негативне значення ?
приклад 1.2.Диск радіусом R = 10 см знаходився в стані спокою, потім почав обертатися з постійним кутовим прискоренням = 0,5 рад/с 2 . Знайти тангенціальне, нормальне та повне прискорення точок на колі диска в кінці другої секунди після початку обертання, а також кут, який становить вектор повного прискорення будь-якої точки диска з його радіусом.
a H =?, a =?, а =?, =?
R=10 см=0,1 м
|
|
Розкладемо вектор повного прискорення аточки на тангенційне прискорення α τ і нормальне прискоренняан ( n- Вектор зовнішньої нормалі до траєкторії):
 .
.
З малюнка видно, що tg = α / н. Використовуючи зв'язок лінійних та кутових прискорень, можна записати
Відомо, що нормальне прискорення визначається формулою:
 ,
,
де кутова швидкістьвизначається з основного рівняння кінематики обертального руху
 .
.
За умовою 0 = 0, тоді  .
.
Отже,
а Н = β 2 t 2 R.
Виконуючи обчислення, отримаємо:
α τ = 0.510 -1 = 510 -2 (м/с 2); а н = 25 · 10 -2 · 4 · 10 -2 = 10 -2 (м / с 2).
 (м/с 2);
(м/с 2);  α=79°.
α=79°.
Механіка- частина фізики, яка вивчає одну з найпростіших і найзагальніших форм руху матерії, яка називається механічним рухом.
Механічне рухє зміна становища одного тіла щодо іншого, умовно прийнятого за нерухоме, з часом.
Навести приклади хутра. руху.
Механічне рух завжди є у інших, складніших формах руху матерії як складова, але з вичерпна їх частина.
Закони класичної механіки та всілякі наслідки з них застосовні лише до рухів макротіл,що рухаються з малими в порівнянні зі швидкістю світла у вакуумі швидкостями. Обмеженість класичної механіки пояснюється тим, що вона була створена на основі вивчення макрорухів із малими швидкостями. Квантова механікавивчає рух мікротіл, релятивістська механіка – рух тіл із великими швидкостями.
Основне завдання механікиполягає в тому, щоб, знаючи взаємодія тіла,рух якого вивчається, з іншими тілами, а також його становищеі стан рухуу певний початковий час, визначити, як змінюється становище цього тіла з часом, тобто. визначити положення тіла у просторі у будь-який час.
Механічний рух тіла буде відомий, якщо відомий рух усіх його частинок. Тому насамперед слід вивчити рух так званої матеріальної точки- Тіла, що володіє кінцевою масою, але зневажливо малими розмірами. У природі реальних матеріальних точок немає. Поняття матеріальної точки є наукова абстракція. Вводячи це поняття, ми абстрагуємося від усіх несуттєвих для цього руху властивостей тіла, таких як, наприклад, його розмірів, будови, змін внутрішньої будови.
Т.ч., всяке тіло можна вважати матеріальною точкою, якщо, по перше,прохідні їм відстані великі в порівнянні з його розмірами та, по-друге, Якщо форма і розміри тіла не мають істотного впливу на характер руху його як цілого.
Введення поняття матеріальної точкивиявляється дуже пелезним і під час розгляду протяжних тіл. У цьому випадку подумки розчленовують протяжне тіло на окремі частини, рух яких можна розглядати як рух матеріальних точок. Знаючи рух всіх цих матеріальних точок, ми цим знатимемо і рух всієї їх сукупності, тобто. протяжного тіла, що розглядається як система матеріальних точок.
Положення рухомого тіла у просторі можна визначити лише щодо деякого певного іншого тіла, зв. тілом відліку,яке умовно вважається нерухомим. Визначити положення точки чи тіла «по відношенню до порожнього простору» неможливо та фізично безглуздо. Зв'язуючи з тілом відліку довільну систему координат,ми отримаємо систему відлікуположень матеріальної точки. Система відліку має бути хронометрована, тобто. забезпечена «годинником», за допомогою якого однозначно визначаються моменти часу.
Найпростішою системою відліку явл. прямокутна система координат OXYZ (декартова), рис. 1. Положення точки М цій системі координат характеризується трьома координатами: X,Y,Z.
Рис.1. Прямокутна система координат.
Сферична система коордтнат:М(r,,).
Існують інші системи координат: циліндрична, полярна.
У всіх випадках при різному виборі системи відліку радіус вектор r (векторний метод опису) та положення точки у просторі (координатний метод) характеризуються кількісно трьома числами, які можуть змінюватись незалежно один від одного. Це є математичним відображенням того факту, що простір тривимірний.
Якщо тіло не відчуває впливу з боку інших тіл, воно називається вільно тілом, що рухається.
Якщо в якості системи відліку вибрати систему, пов'язану з якимось тілом, що вільно рухається, то в такій системі вільний рух інших тіл відбувається прямолінійно і рівномірно (з постійною за величиною і напрямом швидкістю). Це твердження становить зміст закону інерції, вперше відкрито Галілеєм. Система відліку, пов'язана з тілом, що вільно рухається, зв. інерційною системою відліку.Закон інерції зв. також першим законом Ньютона.
Якщо деяка система рухається по відношенню до інерційної системи з постійною (за величиною та напрямом) швидкістю, то вона також буде інерційною.
Усі фізичні явища протікають однаково в різних інерційних системах відліку, які є, таким чином, фізично невідмінними один від одного або еквівалентними.Тому всі фізичні явища вивчаються в інерційних системах відліку. Цей закон називається принципом відносності.
Найбільш звичайною є система відліку пов'язана із земною кулею. Ця система не явл. інерційною через добове обертання Землі навколо своєї осі та кругового руху навколо Сонця. Ці швидкості руху Землі неоднакові і непостійні, тому ця система – неінерційна. Однак при цьому ми робимо дуже невелику помилку, несуттєву для цілого ряду фізичних експериментів, приймаючи «земну» систему відліку як інерційну.
Оскільки три величини, що характеризують положення точки у просторі, взаємно незалежні, кажуть, що мат. точка має три ступенями свободи.(Дати визначення ст.свободи).
Якщо матеріальна точка рухається, її координати з часом змінюються, тобто. величини X, Y, Z та радіус вектор r є функціями часу:
Функції часу, що визначають координати точки, що рухається в будь-який заданий момент часу, називаються кінематичним законом руху.
Дійсно, задаючи той чи інший певний момент часу, завжди можна в результаті підстановки його конкретного чисельного значення (1) визначити всі три координати точки, що рухається, відповідні цьому моменту часу, тобто. встановити, де вона перебуватиме на даний момент часу. Якщо t = t 0 то маємо початкові умови.
Встановлення кінематичного закону руху матеріальної точки та становить основне завдання механіки матеріальної точки. Знаючи його, можна визначити положення точки, що рухається в просторі в будь-який момент часу.
Сукупність послідовних положень, які займає точка М у процесі її руху, утворює в просторі лінію, яка називається траєкторією рухомої точки. Кінематичний закон руху визначає і траєкторію точки, що рухається.
Якщо з першого рівняння системи (1) виразити t = f 1 (x) і підставити інші два рівняння, то отримаємо:
Y = f 2 f 1 (x) = F(x);
Z = f 3 f 1 (x) =Ф(х) (2)
Траєкторія матеріальної точки, що рухається, аналітично задається рівняннями виду (2).
Якщо траєкторія є прямою лінією, то рух називається прямолінійним.Рух, що характеризується криволінійною траєкторією, називається криволінійним.Відстань, відрахована вздовж траєторії тіла, що рухається, яка проходить ним за деякий відрізок часу, називається довжиною шляху(або шляхом). Рух, у якому тіло за довільні рівні проміжки часу проходить рівні шляху, називається рівномірним.Якщо ж за якісь два рівні відрізки часу тілом проходять різні шляхи, рух буде нерівномірним.
Здійснюючи рух, різні тіла за однакові відрізки часу проходять різні шляхи. Чим більший шлях, що проходить тілом за певний проміжок часу, тим швидше це тіло рухається. Для кількісної оцінки швидкості механічного руху вводиться поняття швидкості.Чим швидше тіло рухається, тим більша його швидкість.
У разі рівномірного прямолінійного руху швидкість дорівнює відношенню прохідного тілом шляху до відрізка часу, за який він проходить, тобто дорівнює шляху, що проходить тілом за одиницю часу.
Якщо t 1 S 1 , t 2 S 2 , то за t = t 2 – t 1 тіло проходить шлях S=S 2 -S 1
Отже, швидкість
V= (S 2 – S 1)/ (t 2 – t 1) = S/ t, тобто. S t, a V= Const. (за величиною!).
Розглянемо тепер загальний випадок нерівномірного криволінійного руху. Нехай в момент часу t точкове тіло, що рухається, займає положення М, рис.2, що характеризується радіус-вектором r або координатами X, Y, Z.
Рис.2. Сферична система
На момент часу t 1 = t + t тіло займе положення М 1 , що характеризується r 1 і X 1 ,Y 1, Z 1 . За час t = t 1 – t координати тіла змінюються на X = X 1 – X, Y = Y 1 – Y, Z = Z 1 – Z, a r=r 1 -r. При цьому проекції вектора r на осі координат будуть відповідно рівними: X = r cos(r,X);
Y = r cos(r,Y);
Z = r cos(r,Z);
r= Xi + Yj +Zk,
а величина вектора r дорівнює
r = (X) 2 + (Y) 2 + (Z) 2 .
Вектор r , спрямований з початкового в кінцеве положення точкового тіла, що рухається протягом часу t, зв. вектор переміщення.У випадку криволінійного руху тіла вектор переміщення не збігається з ділянкою траєкторії, прохідним тілом за соотв. кінцевий час, тобто. вектор r – це спрямований відрізок прямий, а відповідний ділянку траєкторії може бути криволінійним.
Величина V = r/ t, дорівнює середній зміні радіус-вектора матер, що рухається. точки за одиницю часу, зв середньою швидкістю руху.При рівномірному прямолінійному русі ця величина, очевидно, дорівнює швидкості в будь-який момент часу, що є постійною величиною, яка не залежить ні від моменту часу t, ні від величини відрізка часу t.
У у разі нерівномірного рухуіз зміною t відношення r/t змінюватиметься, тобто. r/t = f(t). Це означає, що середня швидкість виявиться неоднаковою при різній величині відрізків t, що примикають до моменту часу t, що цікавить нас, тому з її допомогою неможливо характеризувати рух в даний момент часу однозначно.
Переходячи до межі для нескінченно малого проміжку часу (t0), ми отримаємо вектор істинною,або миттєвої швидкостіу точці М 1 .
V= lim V= lim r/t = dr/dt.
t t
Оскільки січуча межі збігається з дотичною, то вектор швидкості Vнаправлений по дотичній до траєкторії. Тоді без урахування напряму
V = V= lim r t = lim St = dS/dt.
Lim r/t – похідна від r до t і позначається dr/dt.t
Ця межа і буде швидкістю точки, що рухається в даний момент часу t, однак, в різні моменти часу її величина і напрямок можуть бути різними.
Вектор швидкості має проекції на осі координат, рівні V x , V Y , V z і може бути записаний
V = dr/dt = V x i + V y j + V z k,
де V x = dX/dt, V y = dY/dt, V z = dZ/dt.
Розмір вектора V дорівнює
V = V x 2 + V y 2 + V z 2 = (dX/dt) 2 + (dY/dt) 2 + (dZ/dt) 2 .
Запишемо формулу, яка зв'язує значення швидкостей V і V однієї і тієї ж матеріальної точки у двох різних системах відліку К та К.
V = V + V,
де V – швидкість системиК по відношенню до системи До.
Ця формула, що пов'язує швидкості однієї і тієї ж матеріальної частки у різних системах відліку, називається правилом складання швидкостей.Це правильне за умови абсолютності течії (однаковості) часу у цих системах.
Механіка, заснована на припущенні про абсолютність часу, зв. ньютонівської чи класичної. Основні закони цієї механіки були сформульовані Ньютоном у його «Математичних засадах натуральної філософії», опубліковані в 1687 році.
При прямолінійному русі швидкість зміни величини швидкості Vхарактеризується прискоренням W, тобто. зміною величини швидкості за одиницю часу.
Загалом довільного криволінійного руху вектор швидкості V може змінюватися і за величиною та за напрямом. Швидкість зміни вектора швидкості тоді характеризуватиметься деяким вектор прискоренняW.
Нехай у момент часу t швидкість матеріальної точки Vа в момент t 1 = t + t вона дорівнює V 1 = V + V. За t = t 1 – t швидкість зміниться на V = V 1 – V. Зміна швидкості за од. часу (прискорення) дорівнюватиме V/ t = W - середнє прискорення рухомого точ. тіла.
Як і при розгляді швидкості, W буде неоднаковим для різних відрізків t, взятих від одного моменту часу t, тобто. не може бути однозначною характеристикою швидкості зміни вектора швидкості в даний момент часу.
Але при зменшенні відрізка t до малої величини подальше його зменшення не призводить до зміни відношення Vt, тобто. при t0 відношення Vt прагнутиме до певної межі:
Lim Vt dVdt W, t
який дає вектор істинногоабо миттєвого прискорення.
Прискорення можна уявити так
W = dV dt = d dt (dr/dt) = d 2 r/dt 2 , тобто. і другий похідної від радіус – вектора за часом.
Відношення вектора V до скаляра t є вектором, паралельним зміні швидкості V. Тому прискоренняяк межа цього відношення при t 0 є вектором, спрямованим V . Але V- спрямований щодо дотичної до траєкторії. Звідси випливає, що вектор прискорення W || Vі спрямований туди, куди з часом повертається вектор швидкості чи дотична до траєкторії, тобто. у бік увігнутості траєкторії.
У загальному випадку криволінійного руху W не паралельний V. Тільки у разі прямолінійного руху W| | V, якщо Vз плином V 1 часу зростає, або W V, якщо Vзменшується.
У разі рівномірного прямолінійного рухувектор Vз часом залишається незмінним. Тоді W d V/dt дорівнюватиме нулю. Рівномірне прямолінійне рух – єдиний вид руху без прискорення!!
Якщо W const та W || V, то в такому разі швидкість за будь-які рівні відрізки часу змінюватиметься на однакову величину і такий рух називається рівномірно прискореним прямолінійним.
S = S 0 + V 0 t + Wt 2/2; V = V 0+Wt.
Навіть якщо величина швидкості постійно залишається незмінною за величиною, але рух криволінійний, тобто. швидкість змінює свій напрямок, то прискорення W 0, т.к. V виявляється відмінним від нуля за будь-якого кінцевого значення t. Тому рівномірний рух точки по колує рух із прискоренням, оскільки її швидкість, увесь час спрямована по відношенню до даного кола, безперервно змінює свій напрямок.
Як і будь-який вектор прискорення можна записати через його проекції на осі координат:
W = W x I + W y j + W z k,
де W x = dV x / dt = d/dt (dX/dt) = d 2 X/dt 2
W y = dV y / dt = d/dt (dY/dt) = d 2 Y/dt 2
W z = dV z / dt = d/dt (dZ/dt) = d 2 Z/dt 2
а величина вектора прискорення буде
W = W x 2 + W y 2 + W z 2.
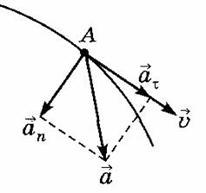
Часто замість виразу вектора прискорення через три його проекції на осі координат зручніше представляти його у вигляді геометричної суми двох складових, спрямованих щодо до траєкторії і нормалі до траєторії. Перша складова W - тангенціальне або дотичне прискоренняхарактеризує швидкість зміни лише величини швидкості, друга W n – зв. доцентровим або нормальним прискореннямхарактеризує швидкість зміни швидкості лише за напрямом.
W =W +W n . W = d V/dt; W n = V 2 /r, а
W W 2 + W n 2 = (d V/dt) 2 + ( V 2 /r) 2
Для рівномірного криволінійного рух. V= const, W = 0 і W = W n .
Для нерівномірного прямолінійного руху(r=) W n =0 іW =W . Якщо при цьому W = const, то рух рівноприскорений. 1.Якщо гострий, то tg = W n /W > 0. Це означає, що d V/dt> 0, т.к. V 2 / r> 0, тобто. величина швидкості зростає з часом, рух рівноприскорене. Якщо - тупий – рух рівноуповільнений.
Фіксувати на відео, написати заяву у дорожню поліцію з додатком відео матеріалу.
Або, як варіант, ходити з бейсбольною битою.Складне питання для мене....так-як я мама 5-ти дітей....старшому синові 17 років, а молодшому скоро буде 2 роки.
ніяк до них не ставлюся...адже швидше за все це молодіжний напрямок.....і ось від КУДИ!!! воно виникло ... мене турбує більше .... чим сам напрямок.
а виникло воно....це я так вважаю і думаю!....від того що дітям приділяється мало уваги...нерозуміння дітей...діти замкнуті...і шукають собі подібних....
але ось вина в цьому не тільки батьків .... вина лежить і на суспільстві, що підлітки стають тим ким стали ... є в цьому і вина однолітків, однокласників, друзів .... що не зрозуміли-не підтримали ... .ось і йдуть підлітки у всілякі групи та напрямки...іноді й у секти релігійні....а це ще напевно гірше...
Іноді знаючи чого хочеш, не знаєш у якому напрямку (дорозі) рухатися. Поки я рухаюся прямою і бачу, як досягти мети, поставленої на найближче майбутнє. Куди далі поверне дорога життя, не знаю, так що рух продовжуватиму в невідомому поки що для мене напрямі.
саме, ходити дуже корисно.. а якщо з метою, як наші пращури мисливці-грибники-ягідники, то взагалі втричі
уперед, тільки вперед. іноді оглядаючись, щоб подивитися чи не випало щось із воза. або хтось)
Так звичайно!
Коли рухаємо мишку, ми робимо вибір, яку інформацію нам отримувати чи як керувати програмою.
Значить, ми щось творимо! :)
Відповідно просуваємося вперед.
Будь-який рух уперед – це життя!
Привіт, Зберігач =)))))))
певного сенсу немає - але ти можеш вигадати свій...
(а якщо подивитися з боку на весь світ, в ньому можна побачити закономірність.... і там ти нікого сенсу для себе не знайдеш, тільки нескінченність процесів, взаємозв'язок явищ реального світу, що постійно повторюється, - закономірність..)
Люди, які тобі справді потрібні, обов'язково тебе наздоженуть.
Звідки ти взяла це марення мультиплікаційного персонажа?
Я б погодився якби було написано "Люди яким я потрібен", а ті хто тобіпотрібен, їх треба домагатися, і заслуговувати на їхню повагу, а не сподівається, що вони самі тебе знайдуть...
6. Криволінійний рух. Кутове переміщення, кутові швидкість та прискорення тіла. Шлях та переміщення при криволінійному русі тіла.
Криволінійний рух– це рух, траєкторія якого є кривою лінією (наприклад, коло, еліпс, гіперболу, параболу). Прикладом криволінійного руху є рух планет, кінця стрілки годинника по циферблату і т.д. У загальному випадку швидкість при криволінійному русізмінюється за величиною та за напрямом.
Криволінійний рух матеріальної точкивважається рівномірним рухом, якщо модуль швидкості постійний (наприклад, рівномірний рухпо колу), і рівноприскореним, якщо модуль та напрямок швидкості змінюється (наприклад, рух тіла, кинутого під кутом до горизонту).
Рис. 1.19. Траєкторія та вектор переміщення при криволінійному русі.
При русі по криволінійній траєкторії вектор переміщення спрямований хордою (рис. 1.19), а l- Довжина траєкторії . Миттєва швидкість руху тіла (тобто швидкість тіла в даній точці траєкторії) спрямована по дотичній в тій точці траєкторії, де в даний момент знаходиться тіло, що рухається (рис. 1.20).
 Рис. 1.20. Миттєва швидкість при криволінійному русі.
Рис. 1.20. Миттєва швидкість при криволінійному русі.
Криволінійний рух – це завжди прискорений рух. Тобто прискорення при криволінійному русіє завжди, навіть якщо модуль швидкості не змінюється, а змінюється тільки напрямок швидкості. Зміна величини швидкості за одиницю часу – це тангенціальне прискорення :
 або
або 
Де v τ , v 0 – величини швидкостей у момент часу t 0 + Δtі t 0 відповідно.
Тангенціальне прискорення у цій точці траєкторії у напрямку збігається з напрямом швидкості руху тіла або протилежно йому.
Нормальне прискорення - це зміна швидкості за одиницю часу:

Нормальне прискореннянаправлено по радіусу кривизни траєкторії (до осі обертання). Нормальне прискорення перпендикулярно до напрямку швидкості.
Центрошвидке прискорення- Це нормальне прискорення при рівномірному русі по колу.
Повне прискорення при рівнозмінному криволінійному русі тілаодно:
Рух тіла по криволінійній траєкторії можна приблизно представити як рух по дугах деяких кіл (рис. 1.21).
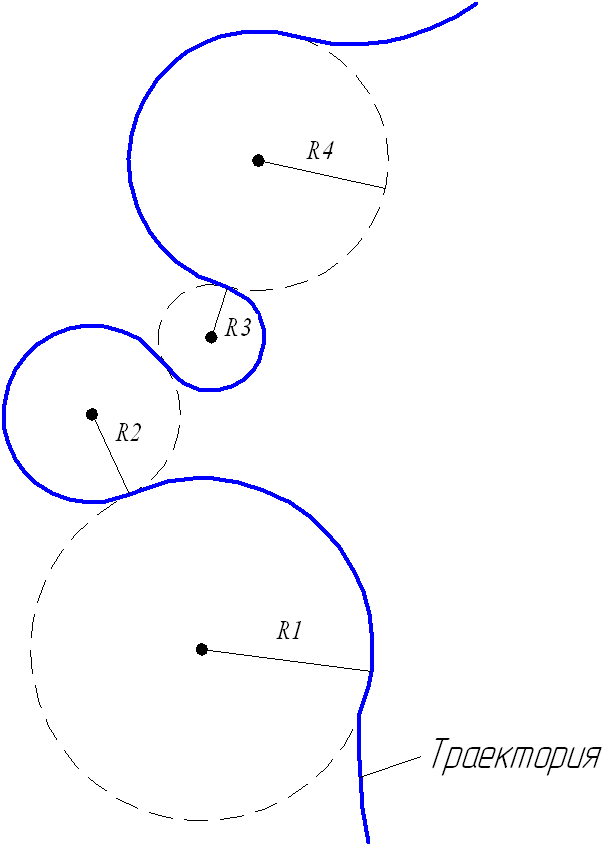 Рис. 1.21. Рух тіла при криволінійному русі.
Рис. 1.21. Рух тіла при криволінійному русі.
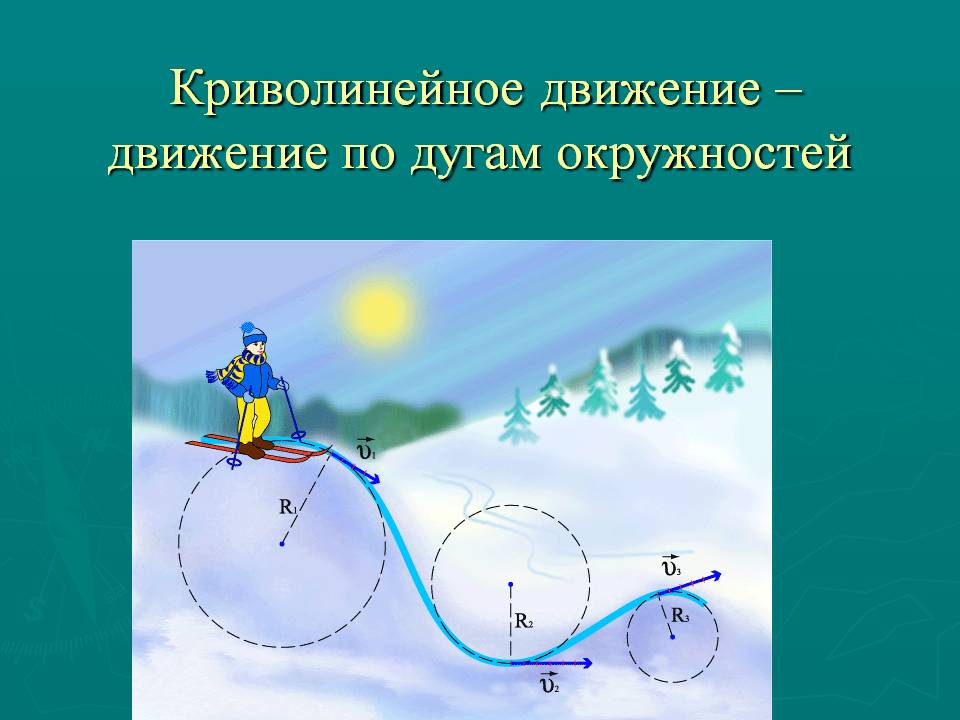
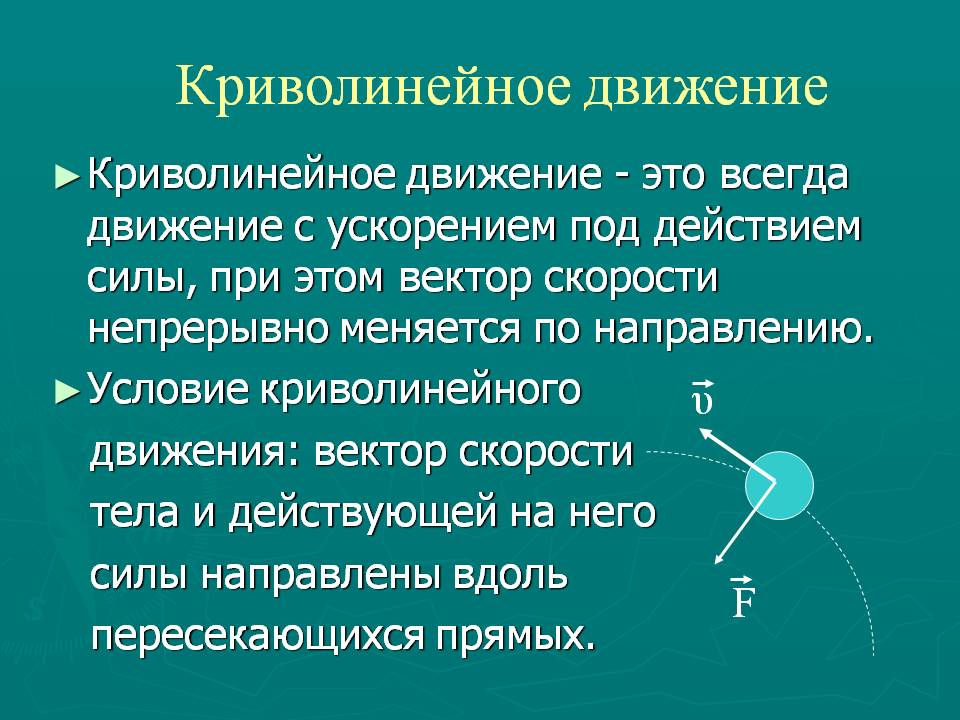
Криволінійний рух
Криволінійні рухи- Рухи, траєкторії яких являють собою не прямі, а криві лінії. По криволінійних траєкторіях рухаються планети, води річок.
Криволінійний рух – це завжди рух із прискоренням, навіть якщо за модулем швидкість постійна. Криволінійний рух із постійним прискоренням завжди відбувається у тій площині, в якій знаходяться вектори прискорення та початкові швидкості точки. У разі криволінійного руху з постійним прискоренням у площині xOyпроекції v xі v yїї швидкості на осі Oxі Ойта координати xі yточки у будь-який момент часу tвизначається за формулами
![]()
![]()
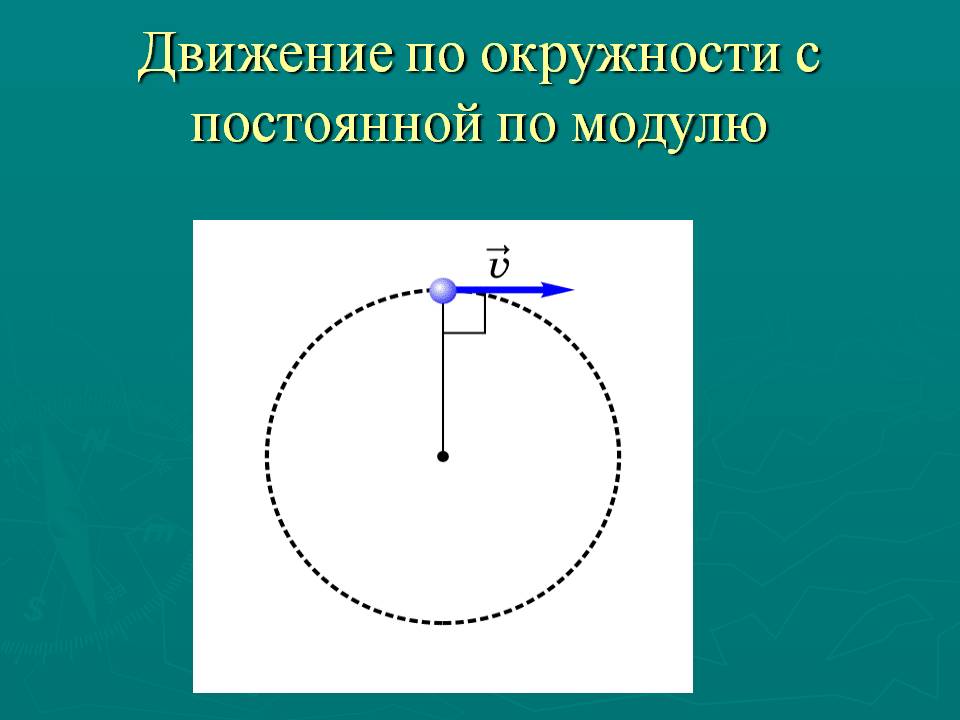
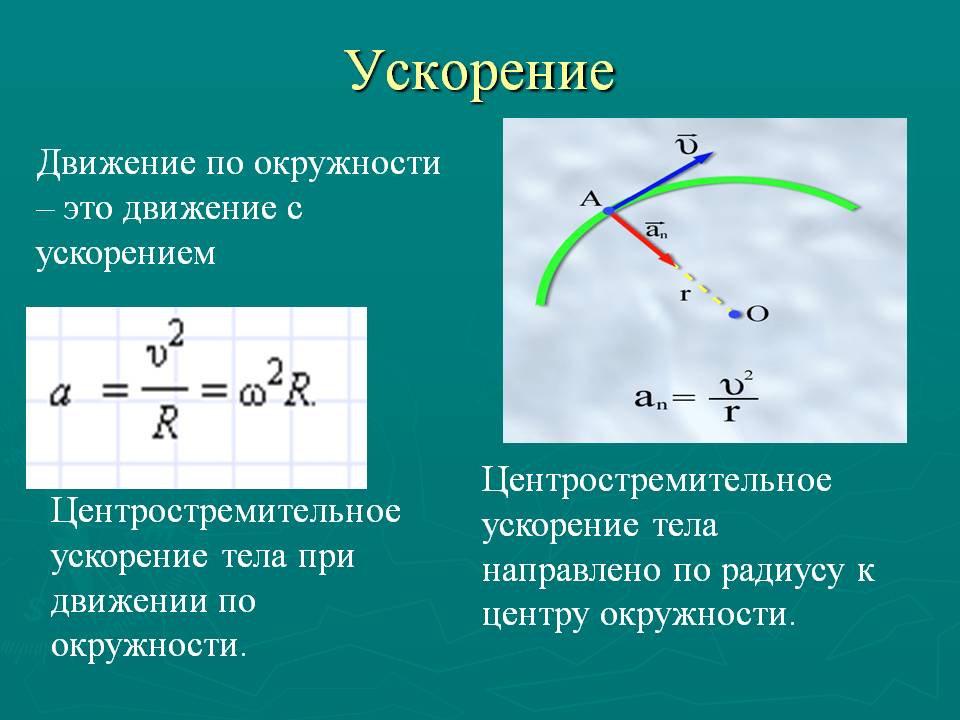
Приватним випадком криволінійного руху є рух по колу. Рух по колу, навіть рівномірний, завжди є прискорений рух: модуль швидкості весь час спрямований по дотичній до траєкторії, постійно змінює напрям, тому рух по колу завжди відбувається з доцентровим прискоренням де r- Радіус кола.
Вектор прискорення при русі коло спрямований до центру кола і перпендикулярно вектору швидкості.
При криволінійному русі прискорення можна представити як суму нормальної та тангенційної складових:
Нормальне (відцентрове) прискорення, спрямоване до центру кривизни траєкторії та характеризує зміну швидкості за напрямком:
v -миттєве значення швидкості, r– радіус кривизна траєкторії у цій точці.
Тангенціальне (дотичне) прискорення, спрямоване по дотичній до траєкторії та характеризує зміну швидкості за модулем.
Повне прискорення, з яким рухається матеріальна точка, дорівнює:
Крім доцентрового прискорення, найважливішими характеристиками рівномірного руху по колу є період і частота обігу.
Період звернення- цей час, за яке тіло відбувається один оборот .
Позначається період літерою Т(с) і визначається за формулою:
де t- час звернення, п- число оборотів, скоєних цей час.
Частота звернення- це величина, чисельно рівна числу оборотів, скоєних за одиницю часу.
Позначається частота грецької літерою (ню) і знаходиться за формулою:
Вимірюється частота 1/с.
Період і частота - величини взаємно зворотні:
Якщо тіло рухається по колу зі швидкістю v,робить один оборот, то пройдений цим тілом шлях можна знайти, помноживши швидкість vна час одного обороту:
l = vT.З іншого боку, цей шлях дорівнює довжині кола 2π r. Тому
vT = 2π r,
![]()
де w(з 1) - кутова швидкість.
При незмінній частоті звернення доцентрове прискорення прямо пропорційно відстані від частинки, що рухається, до центру обертання.
Кутова швидкість (w) – величина, що дорівнює відношенню кута повороту радіуса, на якому знаходиться точка, що обертається, до проміжку часу, за який відбувся цей поворот:
![]() .
.
Зв'язок між лінійною та кутовою швидкостями:
Рух тіла вважатимуться відомим лише тоді, коли відомо, як рухається кожна його точка. Найпростіший рух твердих тіл – поступальний. Поступальнимназивається рух твердого тіла, у якому будь-яка пряма, проведена у цьому тілі, переміщається паралельно самої себе.













![]() Назад вперед
Назад вперед
Увага! Попередній перегляд слайдів використовується виключно для ознайомлення та може не давати уявлення про всі можливості презентації. Якщо вас зацікавила ця робота, будь ласка, завантажте повну версію.
Цілі уроку:дати школярам уявлення про криволінійний рух, частоту, кутове переміщення, кутову швидкість, період. Ознайомити з формулами знаходження цих величин і одиницями виміру. (Слайди 1 та 2)
Завдання:
Освітні: дати учням уявлення про криволінійний рух його траєкторії, величини його характеризуючих, одиниці виміру цих величин і формули для обчислення.
Розвиваючі: продовжувати формування умінь застосовувати теоретичні знання для вирішення практичних завдань, розвивати інтерес до предмета та логічне мислення.
Виховні: продовжувати розвивати кругозір учнів; вміння вести записи у зошитах, спостерігати, помічати закономірності явищ, аргументувати свої висновки.
Обладнання:похилий жолоб, кулька, кулька на нитці, іграшковий автомобіль, дзиґа, модель годинника зі стрілками, мультимедійний проектор, презентація.
ХІД УРОКУ
1. Актуалізація знань
Вчитель.
- Які види руху ви знаєте?
– Чим відрізняються прямолінійні та криволінійні рухи?
– У якій системі відліку можна говорити про ці види руху?
– Порівняйте траєкторію та шлях для прямолінійного та криволінійного рухів. (Слайди 3, 4).
2. Пояснення нового матеріалу
Вчитель.Демонструю: падіння кульки по вертикалі, її скочування по жолобу, обертання кульки на нитки, переміщення іграшкового автомобіля по столу, падіння тенісного м'ячика, кинутого під кутом до горизонту.
Вчитель.Чим відрізняються траєкторії руху запропонованих тіл? (Відповіді учнів)
Спробуйте самі дати визначеннякриволінійного та прямолінійного рухів. (Запис у зошитах):
– прямолінійний рух – рух прямою траєкторією, причому напрям векторів сили та швидкості збігаються ; (Слайд 7)
- криволінійний рух - рух по непрямій траєкторії.
Розглянути два приклади криволінійного руху: по ламаній лінії та по кривій (Замалювати, слайди 5, 6).
Вчитель.Чим відрізняються ці траєкторії?
Учень.У першому випадку траєкторію можна розбити на прямолінійні ділянки та розглянути кожну ділянку окремо. У другому випадку можна розбити криву на дуги кіл і прямолінійні ділянки Т.о. цей рух можна розглядати як послідовність рухів, що відбуваються за дугами кіл різного радіусу (Слайд 8)
Вчитель.Наведіть приклади прямолінійного та криволінійного руху, з якими ви зустрічалися у житті.
3. Повідомлення учня. У природі та техніцідуже часто зустрічаються рухи, траєкторії яких є не прямі, а криві лінії. Це криволінійний рух. По криволінійним траєкторіям рухаються у космічному просторі планети і штучні супутники Землі, але в Землі всілякі засоби транспорту, частини машин і механізмів, води річок, повітря атмосфери тощо.
Якщо притиснути до точильного каменю, що обертається, кінець сталевого прутика, то розпечені частинки, що відриваються від каменю, будуть видно у вигляді іскор. Ці частки летять із тією швидкістю, якою вони мали у момент відриву від каменю. Добре видно, що напрямок руху іскор співпадає з дотичною до кола в тій точці, де пруток стосується каменю. Щодо дотичноїрухаються бризки від коліс автомобіля, що буксує . (Слайд 9)
Вчитель.Таким чином, миттєва швидкість тіла в різних точках криволінійної траєкторії має різний напрямок, причому, зверніть увагу: вектори швидкості і сили, що діє на тіло, спрямовані по прямих . (Слайди 10 та 11).
По модулю швидкість може бути всюди однакова або змінюватися від точки до точки.
Але навіть якщо модуль швидкості не змінюється, її не можна вважати постійною. Швидкість – векторний розмір. Для векторної величини модуль та напрямок однаково важливі. А раз змінюється швидкість, Отже є прискорення. Тому криволінійний рух – це завжди рух із прискореннямнавіть якщо за модулем швидкість постійна. (Слайд 12).
Прискорення тіла, що рівномірно рухається по колу, у будь-якій точці доцентрове, тобто. направлено по радіусу кола до її центру. У будь-якій точці вектор прискорення перпендикулярний вектору швидкості. (Намалювати)
Модуль доцентрового прискорення: а ц = V 2 /R (написати формулу), де V – лінійна швидкість тіла, а R – радіус кола . (Слайди 12, 13)
Вчитель.Рух по колу часто характеризують не швидкістю руху, а проміжком часу, протягом якого тіло здійснює повний оборот. Ця величина називається періодом зверненняі позначається буквою Т. (записати визначення періоду). Знайдемо зв'язок між періодом звернення Т та модулем швидкості при рівномірному русі по колу радіуса R. Т.к. V = S/t = 2R/Т. ( Записати формулу в зошит) (Слайд 14)
Повідомлення учня.Період - це величина, яка досить часто зустрічається в природі та техніці. Так ми знаємо. Що Земля обертається навколо своєї осі та середній період обертання дорівнює 24 годин. Повний оборот Землі навколо Сонця відбувається приблизно за 365,26 діб. Робочі колеса гідротурбін роблять один повний оборот за час, що дорівнює 1 секунді. А гвинт вертольота має період обігу від 0,15 до 0,3 секунд. Період кровообігу у людини дорівнює приблизно 21-22 секунд.
Вчитель.Рух тіла по колу можна охарактеризувати ще однією величиною – числом обертів за одиницю часу. Її називають частотоюзвернення: = 1/Т. Одиницею виміру частоти: з –1 = Гц. ( Записати визначення, одиницю та формулу)(слайд 14)
Повідомлення учня.Колінчасті вали двигунів трактора мають частоту обертання від 60 до 100 обертів на секунду. Ротор газової турбіни обертається із частотою від 200 до 300 об/с. Куля, що вилітає з автомата Калашнікова, обертається із частотою 3000 про/с.
Для вимірювання частоти існують прилади, звані кола для вимірювання частоти, засновані на оптичних ілюзіях. На такому колі нанесені чорні смужки та стоять частоти. При обертанні такого кола чорні смужки утворюють коло за частотою, що відповідає цьому колу. Також для вимірювання частоти використовуються тахометри . (Слайд 15)
(Додаткові характеристики слайди 16, 17)
4. Закріплення матеріалу(слайд18)
Вчитель.На цьому уроці ми познайомилися з описом криволінійного руху, з новими поняттями та величинами. Дайте відповідь на такі запитання:
– Як можна описати криволінійний рух?
– Що називається кутовим рухом? У яких одиницях вимірюється?
– Що називається періодом та частотою? Як пов'язані між собою ці величини? У яких одиницях вимірюються? Як можна їх визначити?
– Що називається кутовою швидкістю? У яких одиницях вона вимірюється? Як її розрахувати?
(Якщо залишається час, можна виконати експериментальне завдання щодо визначення періоду та частоти обертання тіла, підвішеного на нитці.)
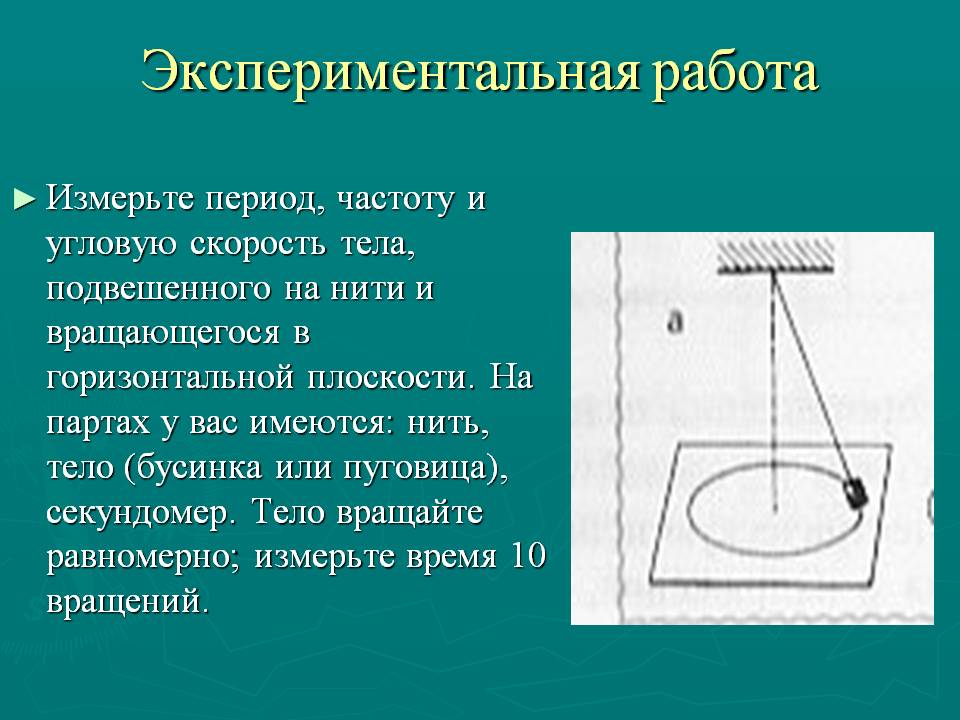
5. Експериментальна робота:вимірювання періоду, частоти тіла, підвішеного на нитці, що обертається в горизонтальній площині. Для цього на кожну парту приготувати набір приладдя: нитка, тіло (намистинка або гудзик), секундомір; інструкцію з виконання роботи: тіло обертати рівномірно, ( для зручності роботу можна виконувати удвох)та виміряти час 10 (згадати визначення повного обороту). (Після виконання роботи обговорити отримані результати). (Слайд 19)
6. Контроль та самоперевірка
Вчитель.Наступне завдання на перевірку, як ви засвоїли новий матеріал. У кожного з вас на столах лежать тести та дві таблиці, в які ви повинні внести букву відповіді. Одну з них ви підпишіть та здасте на перевірку. (Тест 1 виконує 1 варіант, тест 2 – другий варіант)
Тест 1(слайд 20)
1. Прикладом криволінійного руху є...
а) падіння каменю;
б) поворот машини право;
в) біг спринтера на 100-метрівці.
2. Хвилинна стрілка годинника робить один повний оборот. Чому дорівнює період звернення?
а) 60; б) 1/3600; в) 3600 с.
3. Колесо велосипеда робить один оборот за 4 с. Визначте частоту обертання.
а) 0,25 1/с; б) 4 1/с; в) 21/с.
4. Гвинт моторного човна робить 25 оборотів за 1 с. Чим дорівнює кутова швидкість гвинта?
а) 25 рад/с; б) /25 рад/с; в) 50 рад/с.
5. Визначте частоту обертання свердла електричного дриля, якщо його кутова швидкість дорівнює 400 .
а) 800 1/с; б) 400 1/с; в) 2001/с.
Тест 2(слайд 20)
1. Прикладом криволінійного руху є…
а) рух ліфта;
б) стрибок лижника з трампліну;
в) падіння шишки з нижньої гілки ялинки у безвітряну погоду.
2. Секундна стрілка годинника робить один повний оборот. Чому дорівнює її частота звернення?
а) 1/60; б) 60; в) 1 с.
3. Колесо машини робить 20 оборотів за 10 с. Визначте період обертання колеса?
а) 5; б) 10; в) 0,5 с.
4. Ротор потужної парової турбіни робить 50 оборотів за 1 с. Обчисліть кутову швидкість.
а) 50 рад/с; б) /50 рад/с; в) 10 рад/с.
5. Визначте період обертання зірочки велосипеда, якщо кутова швидкість дорівнює.
а) 1; б) 2; в) 0,5 с.
Відповіді на тест 1:б; в; а; в; в
Відповіді на тест 2:б; а; в; в; б (слайд 21)
7. Підбиття підсумків
8. Домашнє завдання:§ 18, 19, питання до §§, упр.17, (усно) (слайд 21)