Регулювання частоти обертання електроприводів є одним із найважливіших завдань сучасної електротехніки. Розробка та застосування раціональних способів регулювання дозволяють підвищити продуктивність механізмів, покращити якість продукції, спростити механічну частину приводу, зменшити витрату електроенергії тощо.
Через стриманий характер руху двигун має тенденцію до резонансу. Чим дрібніший елементарний крок, тим менша резонансна тенденція. Резонанс також залежить від природи навантаження - чим інерційнішою і менш лякає, тим більше схильність до резонансу на певних частотах. У крайньому випадку резонансу двигун виходить з ладу і зупиняється або йде некеровано, не роблячи рух правильно. Така поведінка двигуна зазвичай спостерігається тільки при переміщенні повного кроку на кількох частот нижче 300 Гц.
При роботі в напівшвидкісному та мікро-ручному режимі двигун завжди виконує задану швидкість та положення, збільшуючи шум та вібрацію на своїх резонансних частотах. Чим вища мікроскопія, тим нижчі резонансні частоти. П: У моєму додатку потрібно висока швидкістьвіджимання. Найкраще поекспериментувати з командами кроків, починаючи з низького значення та поступово збільшуючи частоту до бажаного. Зверніть увагу, що поступове збільшення максимальної частоти має бути симетричним і в процесі переходу до початку зупинки.
З регулюванням частоти обертання не слід змішувати природну зміну частоти обертання електродвигуна відповідно до його механічної характеристики, коли змінюється навантаження на валу приводу. Регулювання – це примусова зміна частоти обертання електроприводу залежно від вимог приводного механізму.
Спочатку визначте відповідну частоту старту-зупинки. Потім збільште його до потрібної частоти. Якщо ситуація вже є задовільною, забезпечуйте плавне падіння частоти до початку зупинки. Це так. «Трапецієподібний» профіль швидкості. Якщо результатів не досягнуто як швидкість, спробуйте.
Модуль подається з вищою напругою, як зазначено вище; Пам'ятайте, що після кожного руху наступне вимагає додаткового часу, щоб заспокоїти ротор, який складає мілісекунди. Для майбутнього розвороту цей час має бути довшим; Спробуйте те саме з більш потужним велосипедом. При більш високих значеннях більш високий струм утримання призведе до більш високого нагрівання двигуна і модуля керування і може зажадати додаткового примусового охолодження вентилятором модуля і навіть двигуном.
Будь-який спосіб регулювання характеризують такі основні показники:
діапазон регулювання - відношення максимальної частоти обертання до мінімальної, що можна отримати приводі тобто. ;
плавність регулювання - кількість стійких швидкостей, одержуваних у цьому діапазоні регулювання;
економічність - облік витрат, пов'язаних із створенням самого способу регулювання, та додаткових втрат енергії, що виникають у приводі;
Максимальна швидкість обертання
Зверніться до виробника обраного вами модуля керування! Під час роботи електроприводу діапазон можливої економії часто пов'язаний з характеристиками моменту навантаження, що крутить. У системах із фіксованими енергетичними характеристикамиспоживання енергії прямо пропорційно зменшенню крутного моменту і швидкості обертання валу, тоді як у додатках зі змінним моментом, що крутить, з характеристиками квадратного навантаження споживання енергії змінюється в третій потужності на швидкість обертання.
стабільність роботи приводу – зміна частоти обертання при зміні моменту на валу двигуна. Стабільність роботи цілком визначається жорсткістю механічних характеристик;
Напрямок регулювання показує, що частота обертання змінюється тільки вниз або тільки вгору від основної частоти обертання приводу або можливе регулювання і вгору і вниз.
Тому управління швидкістю обертання машинних двигунів часто призводить до переваг живлення, які можна швидко побачити в рахунку за електроенергію. Однак просте зміна швидкості не є гарантією очікуваної економії. Коефіцієнти продуктивності для трифазних асинхронних двигунівзазвичай даються лише номінальної точки. Якщо двигун працює безпосередньо від мережі з номінальним навантаженням, її продуктивність значно знижується через постійні механічні та електромагнітні втрати.
Робота з частотними перетворювачамизабезпечує оптимальну намагніченість двигуна залежно від якості методу керування. Тому при використанні перетворювача коефіцієнт корисної діївсієї силової установки не падає настільки сильно під час роботи з малопотужним двигуном. Помітне покращення зазвичай спостерігається з двигунами потужністю понад 11 кВт.
Частоту обертання ротора асинхронного двигуна визначають за такою формулою:
де f-Частина змінного струму; р - кількість пар полюсів статора обмотки; s – ковзання.
З наведеної вище формули можна зробити висновок, що частоту обертання асинхронного двигуна можна регулювати зміною однієї з трьох величин:
Внаслідок втрати в силових кабелях зменшуються. Практичний приклад: з введенням в експлуатацію приводів, що обертаються, в кварталі відбулося значне скорочення пусків, і, отже, механічне навантаження на систему. У програмах, де немає швидких змін навантаження, користувач може використовувати автоматичну оптимізацію енергії. Потім інвертор знижує намагніченість двигуна до оптимального мінімуму. Результатом є додаткова економія споживання енергії проти зменшенням обороту.
Ця функція добре працює для всіх повільних регулювань, які зазвичай зустрічаються в автоматиці насоса та вентилятора. Скорочення циклів запуску Керування швидкістю може зменшити кількість запусків у багатьох програмах. Будь-який нерегульований запуск електродвигуна потребує додаткової енергії. У разі насосів споживання енергії для запуску зазвичай становить 5-10% загального споживання, але є приклади того, що для запуску потрібно до 40% енергії.
Ковзання s;
Числа пар полюсів магнітного потоку статора p;
Частоти струму у статорі f.
Розглянемо можливості регулювання частоти обертання ротора шляхом зміни ковзання. Ковзання є функцією багатьох параметрів двигуна:
s = f(R 1 , X 1 ;R 2 ; X 2 ; U),
де R 1 X 1 - активний та індуктивний опір ланцюга статора,; R 2 Х 2 - те ж, ротора;
Крім того, пікові струми та механічні ударні навантаження при пуску знижуються. Інші переваги тривалішого терміну служби завдяки зменшеному механічному навантаженню компонентів. Всі ці можливості доступні за допомогою вбудованих програмних функцій сучасних частотних перетворювачів.
Оптимізуючи крутний момент і швидкість обертання, ефективність використання енергії може бути збільшена в багатьох додатках з постійним моментом, що крутить. Для застосування з постійними характеристикамикрутного моменту навантаження, наприклад, при незначній зміні навантаження зі зміною швидкості обертання більш широкому діапазоні. Серед іншого є конвеєри виробничих ліній, конвеєри, ліфти, мішалки, млини.
U – напруга живлення двигуна.
З формули видно, що для зміни ковзання s можна вводити додаткові резистори або індуктивності ланцюга обмоток статора або ротора або зменшувати напругу живлення двигуна.
Зміна напруги.
Відомо, що максимальний момент асинхронного двигуна пропорційний квадрату напруги мережі та механічні характеристики при різних напругах мають вигляд, показаний на рис.5.8, a. Аналіз цих характеристик спільно з характеристикою моменту опору Мс.г вантажопідйомного пристрою показує, що регулювання частоти обертання можливе дуже вузькому діапазоні. При напрузі 0,6 U н двигун не запуститься, оскільки Мп<Мс.г, а при снижении напряжения ниже 0,6 UB работающий двигатель остановится.
Враховуючи приклад застосування фідера, коли корпус двигуна, встановленого на автомобілі, знаходиться на робочій стрічці, очевидно, що вага тіла завжди та сама, незалежно від того, чи рухається стрічка швидко або повільно. Таким чином, час, необхідний для переміщення цього блоку, завжди те саме. Звичайно, часи тертя та прискорення змінюються залежно від робочого стану, але попит на постійний навантаження. Потужність, необхідна цією системою, пропорційна необхідному моменту, що крутить, і частоті обертання двигуна.
Якщо зменшити швидкість обертання при постійному навантаженні, економія енергії також буде негайно видно. Часто кількість товарів, що перевозяться на стрічці, не є постійною. Якщо швидкість стрічки відповідає кількості матеріалу, що транспортується, це не тільки забезпечить плавність і безперервність транспортування, але і необхідну енергію. Однак, якщо регулювання швидкості неможливе або небажане, то для більшості частотних перетворювачів можна заощаджувати енергію. Вони регулюють вихідну напругу двигуна залежно від навантаження.
Дещо краще регулювання двигуна, що обертає механізм з вентиляторним моментом опору Мс.в, - діапазон регулювання розширюється.
Зміна параметрів R1, X1, X2.
Збільшення зазначених параметрів надає майже такий вплив на механічні характеристики двигуна, як зниження напруги, а підвищення опору R 1 до того ж ще збільшує втрати енергії в ланцюгу статора.
Навантаження збільшується зі збільшенням напруги. Якість цього контролю визначається якістю інвертора. Тим не менш, однієї і тієї ж економії енергії, яку ви можете отримати з цією функцією, недостатньо, щоб виправдати інвестиції в частотний перетворювач. При зменшеній швидкості обертання потреба у енергії зменшується залежно від третьої потужності; Використання частотних перетворювачів для регулювання вентиляторів та відцентрових насосів було пом'якшено у багатьох застосуваннях менш ніж за два роки.
Системи керування швидкістю насоса та вентилятора є найбільш поширеними застосуваннями приводів із змінним крутним навантаженням із квадратними характеристиками. Однак у разі насосів важливо розрізняти широко поширені вихрові насоси зі змінними характеристиками моменту, що крутить, від ексцентрикових, вакуумних або об'ємних насосів, які мають постійне навантаження на крутний момент.
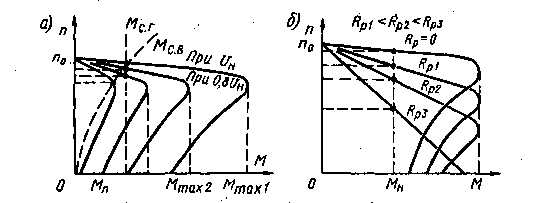
Рис.5.8 Механічні характеристики асинхронного двигуна за зміни
напруги та активного опору ланцюга ротора
Наприкінці 50-х набув деяке поширення так званий дросельний електропривод, в якому збільшення опору X 1 досягалося включенням в ланцюг статора магнітного підсилювача (дроселя насичення). Головний недолік таких електроприводів (у тому числі при зміні напруги U) полягає в тому, що потужність ковзання повністю перетворюється на тепло в роторі, збільшуючи перегрів двигуна. У дросельних електроприводах також зменшується коефіцієнт потужності cosf.
Кількість насосів та вентиляторів величезна. Приблизно 70% енергії, що споживається у промислових цілях по всьому Європейському союзу, - це електродвигуни, а насоси та вентилятори становлять близько 37%. Простий, але дуже ефективний спосіб економії енергії в машинах зі змінною швидкістю – це контроль швидкості. При зменшеній швидкості обертання попит енергію зменшується до третьої потужності. Цей потенціал з високою економічністю робить усі додатки квадратними метрами ідеальними для запуску аналізу енергоефективності.
Крім характеристик насоса та системи характеристична крива, поряд з характеристиками насоса та системи, також показує кілька кривих ефективності; Як в управлінні дросельною заслінкою, так і при регулюванні швидкості обертання робоча точка виходить за межі оптимального коефіцієнта ефективності.
Зі сказаного випливає, що збільшення параметрів R 1 X 1 Х 2 або зменшення U не тільки задля регулювання частоти обертання, а й через якісь інші причини (наприклад, вплив параметрів мережі) для асинхронного двигуна вкрай небажано.
Зміна активного опору ланцюга ротора.
Єдиний параметр асинхронного двигуна, від якого не залежить максимальний момент двигуна, – це опір R2. Отже, при введенні в ланцюг ротора додаткових резисторів зберігається механічна здатність перевантажувального двигуна і, що дуже важливо, втрати енергії виділяються в основному на резисторах, тобто за межами двигуна.
Щоб уникнути несподіванок при налаштуванні швидкості насосів та вентиляторів, користувач повинен на етапі проектування пам'ятати, що швидкість перемикання також змінює робочу точку та, отже, коефіцієнт ефективності машини потоку. Складання проточної машини та привід змінної швидкості зі змінною швидкістю - це система, яка економить енергію. Якщо різниця між максимальною споживаною потужністю і середнім робочим навантаженням із недостатнім двигуном занадто велика, хорошим рішенням є використання каскадної системи.
Такий спосіб застосовується тільки для двигунів з фазним ротором і з кільцями. Опір короткозамкнутого ротора змінювати практично неможливо. Механічні характеристики при різних опорах ротора показано на рис.5.8, б.
Коротко процес регулювання виглядає так: М=Мс, n=const;  -
- -
- -
- -
- -
- -
- -
- . Запис пояснюється формулами (2-6).
. Запис пояснюється формулами (2-6).
Також при перебудові існуючої системи такі інвестиції повертаються за короткий час. У каскадній системі насос контролю швидкості покриває основну потребу. Як тільки збільшується попит, перетворювач частоти перемикається на наступний насос. Таким чином насоси працюють оптимально з оптимальною ефективністю. Регулювання насоса завжди забезпечує найкраще використання системи з погляду енергії. Та ж конструкція може бути аналогічно застосована до збирання вентилятора.
Залежно від виробника та версії, каскадні елементи керування вже вбудовані в інвертор або доступні як зовнішні модулі. На кривій показана споживана потужність вибраного насоса при регулюванні швидкості - на частоті менше 32 Гц, додаткові втрати насоса переважують заощадження; У представленому пристрої оптимальна енергетична частота становить 38 Гц - якби насос у відсутності контролю швидкості, енергетичний баланс було набагато гірше.
З погляду діапазону регулювання, плавності, економічності цей спосіб аналогічний регулюванню частоти обертання двигуна постійного струму зміною опору ланцюга якоря. Він застосовується в електроприводах брашпиля та шпиля судів типів «Андіжан», «Повенець».
Зміна числа пар полюсів.
Асинхронні двигуни, у яких трифазна обмотка статора може створювати магнітне поле, що обертається, з різним числом пар полюсів,
Для більшості насосних або вентиляційних систем для регулювання тиску або витрати використовуються клапани, жалюзі, дросельні клапани або триходові клапани. Якщо керування роторним насосом керується дросельним клапаном, робоча точка переміщається кривою кривою продуктивності насоса.
Потрібне мінімальне скорочення необхідної енергії порівняно з потребою в номінальній робочій точці насоса. При налаштуванні виходу насоса шляхом зміни швидкості обертання робоча точка переміщається кривою характеристик системи. За допомогою цього методу регулювання попит на енергію падає у третій мірі порівняно з регулюванням дроселювання! Насос потребує, наприклад, половини швидкості обертання лише одного восьмого споживання енергії.
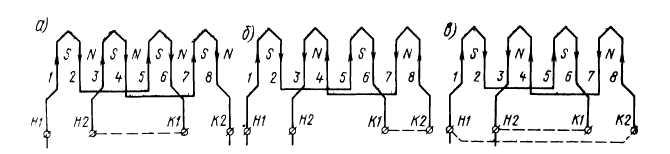
Рис.5.9. Схема, що пояснює принцип отримання полюсоперемикання
називаються полюсоперемикання. Розроблено трифазні обмотки, які можна перемикати на різну кількість пар полюсів щодо: 2:1, 5:2, 7:3, 3:1 і т.д.
Принцип створення полюсоперемикає обмотки пояснимо на прикладі однофазної обмотки, укладеної у восьми пазах. Обмотка складається із двох напівобмоток. Якщо напівобмотки з'єднати послідовно, тобто перемичка буде між висновками До 1 і Н 2 (рис.5.9 а), то така обмотка буде створювати чотири пари полюсів (р=4). Число полюсів, створюваних обмоткою, можна знайти, задавшись напрямом струму в ній і застосувавши правило "буралки" для визначення напрямку силових ліній навколо пазів.
Якщо напівобмотки з'єднати зустрічно-послідовно, тобто. перемичка між висновками До 1 і К 2 (рис.9, б), така обмотка буде створювати дві пари полюсів (р = 2). При вибраному напрямку струму поле між пазами 2 і 3, 4 і 5, 6 і 7, 8 та 1 взаємно знищується.
Напівобмотки можна з'єднати зустрічно-паралельно, тобто. перемички між висновками H 1 і К 2 Н 2 і К 1 (рис.9, в), тоді обмотка буде також створювати дві пари полюсів (р=2).
Таким чином, існують два способи перемикання обмотки на менше пар полюсів відносно 2:1. Перший спосіб - перемикання з послідовного з'єднання напівобмоток на зустрічно-послідовне, другий - перемикання з послідовного з'єднання на зустрічно-паралельне. Розглянемо кожен спосіб стосовно трифазної обмотки двигуна.
При першому способі перемикання обмотка, з'єднана зіркою, повинна мати 9 висновків на щитку (рис.5.10 а), а при з'єднанні трикутником - 12 висновків (рис.5.10 б). Після перемикання характер з'єднання обмоток не змінюється, т. е. зірка переключається на зірку, а трикутник - на трикутник.
Потужність двигуна при першому способі перемикання залишається постійною, отже, змінюються номінальний та максимальний моменти двигуна. Спільний розгляд механічних характеристик двигуна та різних механізмів (рис.5.10, в) показує, що такий спосіб перемикання найбільш доцільний для регулювання частоти обертання металорізальних верстатів.
У суднових електроприводах вантажопідйомних пристроїв, брашпилів, шпилів широкого поширення набули тришвидкісні асинхронні двигуни з трьома окремими обмотками на статорі різне число пар полюсів.
При другому способі перемикання обмотка, з'єднана зіркою, має лише 6 висновків (рис.5.11 а). Після перемикання утворюється з'єднання обмотки подвійна зірка. Потужність двигуна в цьому випадку подвоюється, а номінальний момент залишається незмінним.
Спільний розгляд механічних характеристик двигуна та різних механізмів (рис.5.11 б) показує, що другий спосіб перемикання доцільно застосовувати для регулювання частоти обертання вантажопідйомних пристроїв.
Якщо обмотка з'єднана трикутником, то після перемикання другого способу виходить з'єднання подвійна зірка. Потужність двигуна у своїй зростає на 15%.
Розглянуто найбільш прості способи перемикання обмоток, що дають два ступені швидкості. При складнішому перемиканні трифазної обмотки можна отримати три і навіть чотири ступені швидкості з самим. різним співвідношенням полюсів. Наприклад, вітчизняні двигуни серії МАП з однією трифазною обмоткою мають три швидкості (МАП-42/8-4-2, потужність 0,8/1, 8/2 кВт, частота обертання 700/1400/2800 об/хв) та чотири ( МАП-52/8-6-4-2, потужність 1,2/2,5/3/4 кВт, частота обертання 460/700/920/1440 об/хв). Більше чотирьох швидкостей практично не зустрічається, оскільки сильно ускладнюються обмотка та її перемикання. У двигуна МАП-52/8-6-4-2 на вивідний щиток зроблено 22 виводи.
У суднових електроприводах вантажопідйомних пристроїв, брашпилів, шпилів широкого поширення набули тришвидкісні асинхронні двигуни з трьома окремими обмотками на статорі різне число пар полюсів. Частота обертів
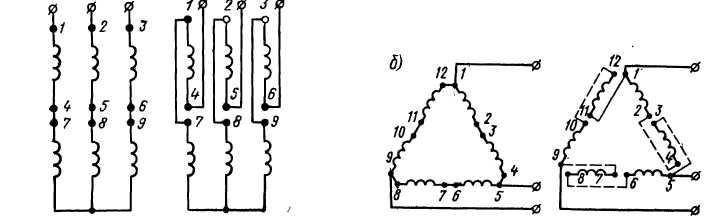
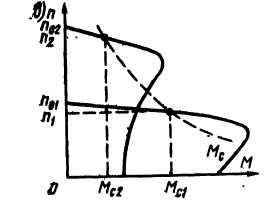
Рис.5.10. Перший спосіб перемикання трифазної обмотки, з'єднаної зіркою,
і трикутником, та відповідні механічні характеристики АТ.
регулюється включенням тієї чи іншої обмотки, але самі обмотки не перемикаються.
Вітчизняна промисловість випускає для суднових електроприводів багатошвидкісні асинхронні двигуни серії МАП, діапазон регулювання частоти обертання 6:1 або 7:1 Обмотка першої швидкості зазвичай має 26 або 28 полюсів.
Регулювання перемиканням пар полюсів відрізняється високою економічністю, оскільки ротор обертається при частоті, що встановилася, зі ковзанням в межах номінального і ніяких додаткових резисторів в ланцюг двигуна не включається. Серйозний недолік цього способу - ступінчастість та обмежена кількість швидкостей.
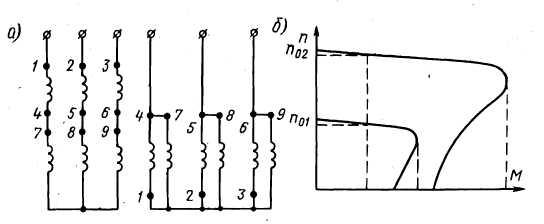
Рис.5.11. Другий спосіб перемикання трифазної обмотки, з'єднаної зіркою, і
відповідні механічні характеристики асинхронного двигуна
Регулювання частоти обертання зміною частоти струму мережі живлення (частотне регулювання).
Цей спосіб регулювання заснований на зміні синхронної частоти обертання n 0, яка пропорційна частоті струму в обмотці статора. Для здійснення такого регулювання необхідне джерело живлення з частотою струму, що регулюється. Як джерело застосовуються електромагнітні та напівпровідникові перетворювачі частоти. Однак необхідно мати на увазі, що одночасно зі зміною частоти напруги живленняf буде змінюватися максимальний електромагнітний момент двигуна. Тому для збереження перевантажувальної здатності, коефіцієнта потужності та ККД двигуна на необхідному рівні необхідно одночасно зі зміною частоти f змінювати і напругу мережі U. Якщо регулювання частоти обертання двигуна проводиться за умови сталості навантажувального моменту, то напруга, що підводиться, необхідно змінювати пропорційно зміні частоти струму, так, щоб їхнє ставлення залишалося величиною постійної:
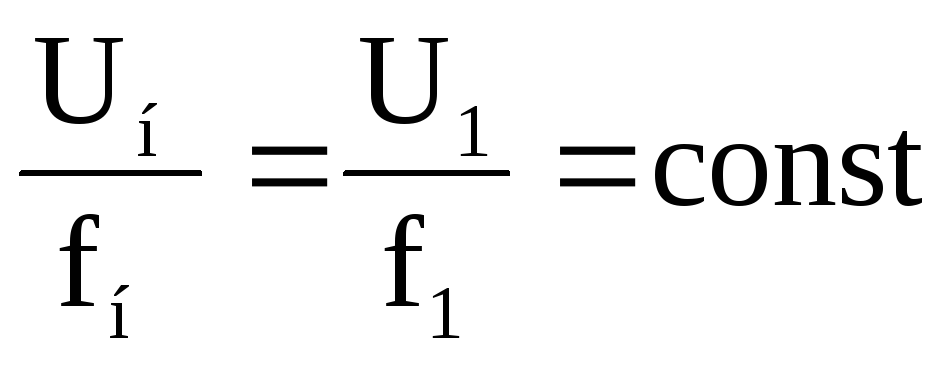
 ;
;
Частотне регулювання дозволяє плавно змінювати частоту обертання двигунів у широкому діапазоні (до 12:1).
Регулювання частоти обертання зміною частоти струму - це раціональний і економічний спосіб. Основні його переваги:
Використовується звичайний короткозамкнутий двигун;
Регулювання з погляду втрат у двигуні є економічним;
Досягаються великий діапазон та плавність регулювання;
Зберігається жорсткість механічних характеристик, отже і стабільність роботи приводу;
Рекуперативне гальмування може здійснюватись майже до повної зупинки.
Разом з тим відомо, що частота струму суднової електростанції підтримується постійною і регулювання частоти обертання двигуна потрібен окремий перетворювач частоти струму.
Сучасний частотно регульований електропривод складається з асинхронного або синхронного електричного двигуна та перетворювача частоти (рис.5.12).
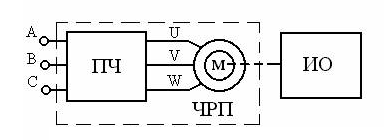
Рис.5.12 Частотно регульований електропривод
Перетворювач частоти управляє електричним двигуном і є електронним статичним пристроєм. На виході перетворювача формується електрична напруга зі змінними амплітудою та частотою. Назва «частотно регульований електропривод» обумовлена тим, що регулювання швидкості обертання двигуна здійснюється зміною частоти напруги живлення, що подається двигун від перетворювача частоти.
Протягом останніх років спостерігається широке та успішне впровадження частотно регульованого електроприводу на судах як для вирішення різних технологічних завдань, так і в системах електроруху. Це в першу чергу розробкою та створенням перетворювачів частоти на принципово новій елементній базі, головним чином на біполярних транзисторах із ізольованим затвором IGBT.
У синхронному електричному двигуні частота обертання ротора в режимі дорівнює частоті обертання магнітного поля статора .
В асинхронному електричному двигуні частота обертання ротора в режимі відрізняється від частоти обертання на величину ковзання.
Частота обертання магнітного поля залежить від частоти напруги живлення. При живленні обмотки статора електричного двигуна трифазною напругою з частотою створюється магнітне поле, що обертається. Швидкість обертання цього поля визначається за відомою формулою
де - Число пар полюсів статора.
Перехід від швидкості обертання поля , що вимірюється в радіанах, до частоти обертання , вираженої в обертах за хвилину, здійснюється за такою формулою
де 60 – коефіцієнт перерахунку розмірності.
Підставивши в це рівняння швидкість обертання поля, отримаємо, що
Таким чином, частота обертання ротора синхронного та асинхронного двигунів залежить від частоти напруги живлення.
На цій залежності і ґрунтується метод частотного регулювання.
Змінюючи за допомогою перетворювача частоту на вході двигуна ми регулюємо частоту обертання ротора.
У найбільш поширеному частотно регульованому приводі на основі асинхронних двигунів з короткозамкненим ротором застосовуються скалярне та векторне частотне керування.
При скалярному управлінніза певним законом змінюють амплітуду та частоту прикладеного до двигуна напруги. Зміна частоти напруги живлення призводить до відхилення від розрахункових значень максимального і пускового моментів двигуна, к.п.д., коефіцієнта потужності. Тому підтримки необхідних робочих характеристик двигуна необхідно зі зміною частоти одночасно відповідно змінювати і амплітуду напруги.
У існуючих перетворювачах частоти при скалярному управлінні найчастіше підтримується постійним відношення максимального моменту двигуна моменту опору на валу. Тобто при зміні частоти амплітуда напруги змінюється таким чином, що відношення максимального моменту двигуна до моменту навантаження залишається незмінним. Це відношення називається перевантажувальною здатністю двигуна.
За сталості перевантажувальної здатності номінальні коефіцієнт потужності та к.п.д. двигуна по всьому діапазоні регулювання частоти обертання практично не змінюються.
Максимальний момент, що розвивається двигуном, визначається наступною залежністю
де - Постійний коефіцієнт.
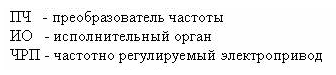
Тому залежність напруги живлення від частоти визначається характером навантаження на вал електричного двигуна.
Для постійного моменту навантаження підтримується відношення U/f = const, і по суті забезпечується сталість максимального моменту двигуна. Характер залежності напруги живлення від частоти випадку з постійним моментом навантаження зображений на рис. 5.13(а). Кут нахилу прямої на графіку залежить від величин моменту опору і максимального моменту, що крутить, двигуна.
Разом з тим, на малих частотах, починаючи з деякого значення частоти, максимальний момент двигуна починає падати. Для компенсації цього і збільшення пускового моменту використовується підвищення рівня напруги живлення.
У разі вентиляторного навантаження реалізується залежність U/f2 = const. Характер залежності напруги живлення від частоти цього випадку показаний на рис.5.13 (б).
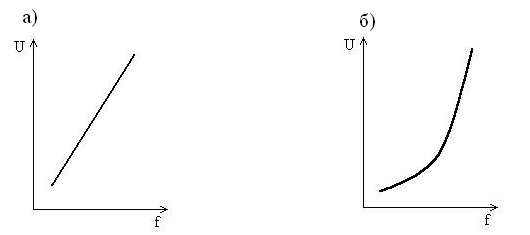
Рис.5.13 Характер залежності напруги живлення від частоти для випадку:
а) із постійним моментом навантаження
б) з вентиляторним моментом навантаження
При регулюванні в області малих частот максимальний момент також зменшується, але для цього навантаження це некритично.
Використовуючи залежність максимального моменту, що крутить, від напруги і частоти, можна побудувати графік U від f для будь-якого типу навантаження.
Важливою перевагою скалярного методу є можливість одночасного керування групою електродвигунів.
Скалярне керування достатньо для більшості практичних випадків застосування частотно регульованого електроприводу з діапазоном регулювання частоти обертання двигуна до 1:40.
Векторне керуваннядозволяє суттєво збільшити діапазон керування, точність регулювання, підвищити швидкодію електроприводу. Цей метод забезпечує безпосереднє керування крутним моментом двигуна.
Обертальний момент визначається струмом статора, який створює збуджуюче магнітне поле. При безпосередньому керуванні моментом необхідно змінювати окрім амплітуди та фазу статорного струму, тобто вектор струму. Цим і зумовлений термін «векторне керування».
Для управління вектором струму, а, отже, положенням магнітного потоку статора відносно ротора, що обертається потрібно знати точне положення ротора в будь-який момент часу. Завдання вирішується або за допомогою виносного датчика положення ротора, або визначення положення ротора шляхом обчислень за іншими параметрами двигуна. Як ці параметри використовуються струми та напруги статорних обмоток.
Менш дорогим є частотно регульований електропривод з векторним керуванням без датчика зворотного зв'язку швидкості, проте векторне керування при цьому вимагає великого об'єму та високої швидкості обчислень від перетворювача частоти.
Крім того, для безпосереднього управління моментом при малих, близьких до нульових швидкостей обертання робота частотно регульованого електроприводу без зворотного зв'язку за швидкістю неможлива.
Векторне управління з датчиком зворотного зв'язку швидкості забезпечує діапазон регулювання до 1:1000 і вище, точність регулювання швидкості – соті частки відсотка, точність по моменту – одиниці відсотків.
Перетворювач частоти – це пристрій, призначений для перетворення змінного струму (напруги) однієї частоти змінний струм (напруга) іншої частоти.
Вихідна частота в сучасних перетворювачах може змінюватися в широкому діапазоні і бути як вище, так і нижче частоти мережі живлення.
Схема будь-якого перетворювача частоти складається з силової та керуючої частин. Силова частина перетворювачів зазвичай виконана на тиристорах чи транзисторах, які працюють у режимі електронних ключів. Керівна частина виконується на цифрових мікропроцесорах та забезпечує управління силовими електронними ключами, а також вирішення великої кількості допоміжних завдань (контроль, діагностика, захист).
Перетворювачі частоти, що застосовуються в регульованому електроприводі, залежно від структури та принципу роботи силової частини поділяються на два класи:
1. Перетворювачі частоти з явно вираженою проміжною ланкою постійного струму.
2. Перетворювачі частоти з безпосереднім зв'язком (без проміжної ланки постійного струму).
Кожен із існуючих класів перетворювачів має свої переваги та недоліки, які визначають область раціонального застосування кожного з них.
У перетворювачів з безпосереднім зв'язком (рис. 5.14) силова частина являє собою керований випрямляч і виконана на тиристорах, що не замикаються. Система управління по черзі відмикає групи тиристотрів і підключає статорні обмотки двигуна до мережі живлення.
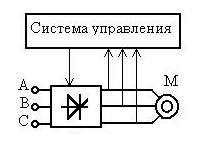
Рис. 5.14 Перетворювач частоти із безпосереднім зв'язком
Таким чином, вихідна напруга перетворювача формується з "вирізаних" ділянок синусоїд вхідної напруги. На рис.5.15 показаний приклад формування вихідної напруги однієї з фаз навантаження.
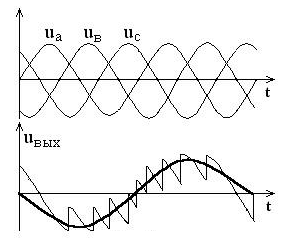
Рис.5.15 Формування вихідної напруги для однієї з фаз навантаження
На вході перетворювача діє трифазна синусоїдальна напруга u а, u в, u с. Вихідна напруга u вих має несинусоїдальну «пилкоподібну» форму, яку умовно можна апроксимувати синусоїдою (потовщена лінія). З малюнка видно, що частота вихідної напруги не може дорівнювати або вище частоти мережі живлення. Вона знаходиться у діапазоні від 0 до 30 Гц. Як наслідок, малий діапазон управління частоти обертання двигуна (не більше 1: 10). Це обмеження не дозволяє застосовувати такі перетворювачі в сучасних частотно регульованих приводах із широким діапазоном регулювання технологічних параметрів.
Використання тиристорів, що не замикаються, вимагає відносно складних систем управління, які збільшують вартість перетворювача.
"Різана" синусоїда на виході перетворювача є джерелом вищих гармонік, які викликають додаткові втрати в електричному двигуні, перегрів електричної машини, зниження моменту, дуже сильні перешкоди в мережі живлення. Застосування компенсуючих пристроїв призводить до підвищення вартості, маси, габаритів, зниження к.п.д. системи загалом.
Поряд із перерахованими недоліками перетворювачів з безпосереднім зв'язком, вони мають певні переваги. До них відносяться:
Практично найвищий ККД щодо інших перетворювачів (98,5% і вище),
Здатність працювати з великими напругами і струмами, що уможливлює їх використання в потужних високовольтних приводах,
Відносна дешевизна, незважаючи на збільшення абсолютної вартості за рахунок схем керування та додаткового обладнання.
Подібні схеми перетворювачів використовуються в старих приводах і нові конструкції практично не розробляються.
Найбільш широке застосування в сучасних частотно регульованих приводах знаходять перетворювачі з явно вираженою ланкою постійного струму (рис. 5.16).
У перетворювачах цього класу використовується подвійне перетворення електричної енергії: вхідна синусоїдальна напруга з постійною амплітудою і частотою випрямляється у випрямлячі (В), фільтрується фільтром (Ф), згладжується, а потім знову перетворюється інвертором (І) змінну напругу змінної частоти і. Подвійне перетворення енергії призводить до зниження к.п.д. та до деякого погіршення масогабаритних показників по відношенню до перетворювачів із безпосереднім зв'язком.
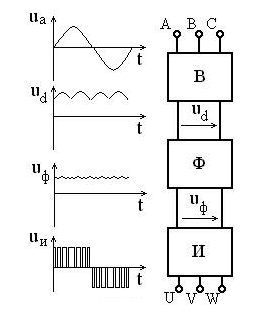
Рис 5.16 Перетворювач частоти зі ланкою постійного струму
Для формування синусоїдальної змінної напруги використовуються автономні інвертори напруги та автономні інвертори струму.
Як електронні ключі в інверторах застосовуються тиристори GTO, що замикаються, і їх удосконалені модифікації GCT, IGCT, SGCT, і біполярні транзистори з ізольованим затвором IGBT.
Головною перевагою тиристорних перетворювачів частоти, як і в схемі з безпосереднім зв'язком, є здатність працювати з великими струмами та напругами, витримуючи при цьому тривале навантаження та імпульсні дії.
Вони мають вищий ККД (до 98%) по відношенню до перетворювачів на IGBT транзисторах (95 – 98%).
Перетворювачі частоти на тиристорах в даний час займають домінуюче положення у високовольтному приводі в діапазоні потужностей від сотень кіловат і до десятків мегават з вихідною напругою 3 - 10 кВ і вище. Однак їх ціна на один кВт вихідної потужності найбільша у класі високовольтних перетворювачів.
До недавнього минулого перетворювачі частоти на GTO становили основну частку і в низьковольтному частотно регульованому приводі. Але з появою IGBT транзисторів стався «природний відбір» і сьогодні перетворювачі на їх базі загальновизнані лідери в області частотно регульованого приводу.
Тиристор є напівкерованим приладам: для його включення достатньо подати короткий імпульс на висновок, що управляє, але для вимикання необхідно або прикласти до нього зворотну напругу, або знизити комутований струм до нуля. Для цього в тиристорному перетворювачі частоти потрібна складна та громіздка система керування.
Біполярні транзистори з ізольованим затвором IGBT відрізняють від тиристорів повна керованість, проста неенергоємна система управління, найвища робоча частота
Внаслідок цього перетворювачі частоти на IGBT дозволяють розширити діапазон керування швидкості обертання двигуна, підвищити швидкість приводу в цілому.
Для асинхронного електроприводу з векторним керуванням перетворювачі на IGBT дозволяють працювати на низьких швидкостях без датчика зворотного зв'язку.
Застосування IGBT з більш високою частотою перемикання разом із мікропроцесорною системою управління в перетворювачах частоти знижує рівень вищих гармонік, характерних для тиристорних перетворювачів. Як наслідок менші додаткові втрати в обмотках та магнітопроводі електродвигуна, зменшення нагріву електричної машини, зниження пульсацій моменту та виключення так званого крокування ротора в області малих частот. Знижуються втрати у трансформаторах, конденсаторних батареях, збільшується їхній термін служби та ізоляції проводів, зменшуються кількість помилкових спрацьовувань пристроїв захисту та похибки індукційних вимірювальних приладів.
Перетворювачі на транзисторах IGBT порівняно з тиристорними перетворювачами при однаковій вихідній потужності відрізняються меншими габаритами, масою, підвищеною надійністю через модульне виконання електронних ключів, кращого тепловідведення з поверхні модуля і меншої кількості конструктивних елементів.
Вони дозволяють реалізувати більш повний захист від кидків струму та від перенапруги, що суттєво знижує ймовірність відмов та пошкоджень електроприводу.
На даний момент низьковольтні перетворювачі на IGBT мають більш високу ціну на одиницю вихідної потужності через відносну складність виробництва транзисторних модулів. Однак за співвідношенням ціна/якість, виходячи з перерахованих переваг, вони явно виграють у тиристорних перетворювачів, крім того протягом останніх років спостерігається неухильне зниження цін на IGBT модулі.
Головною перешкодою на шляху їх використання у високовольтному приводі з прямим перетворенням частоти та при потужностях вище 1 – 2 МВт зараз є технологічні обмеження. Збільшення напруги, що комутується, і робочого струму призводить до збільшення розмірів транзисторного модуля, а також вимагає більш ефективного відведення тепла від кремнієвого кристала.
Нові технології виробництва біполярних транзисторів спрямовані на подолання цих обмежень, і перспективність застосування IGBT дуже висока також високовольтному приводі. В даний час транзистори IGBT застосовуються у високовольтних перетворювачах у вигляді послідовно з'єднаних декількох одиничних модулів.
Типова схема низьковольтного перетворювача частоти IGBT представлена на рис. 5.17 У нижній частині малюнка зображені графіки напруги та струмів на виході кожного елемента перетворювача.
Змінна напруга мережі живлення (u вх.) з постійною амплітудою і частотою (U вх = const, f вх = const) надходить на керований або некерований випрямляч (1).
Для згладжування пульсацій випрямленої напруги (u випр.) Використовується фільтр (2). Випрямляч та ємнісний фільтр (2) утворюють ланку постійного струму.
З виходу фільтра постійна напруга u d надходить на автономний вхідний імпульсного інвертора (3).
Автономний інвертор сучасних низьковольтних перетворювачів, як було зазначено, виконується на основі біполярних силових транзисторів з ізольованим затвором IGBT. На аналізованому малюнку зображена схема перетворювача частоти з автономним інвертором напруги як набула найбільшого поширення.
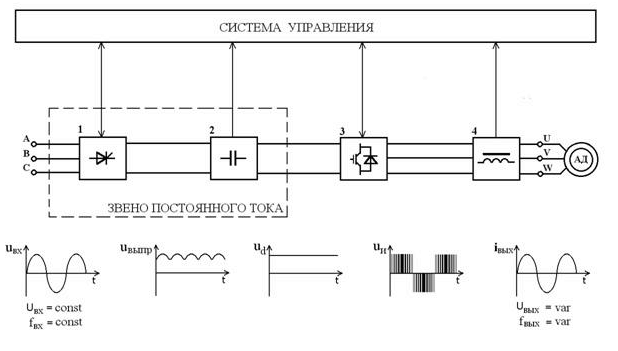
Рис. 5.17 Типова схема перетворювача частоти на транзисторах IGBT
В інверторі здійснюється перетворення постійної напруги u d в трифазна (або однофазна) імпульсна напруга u і змінної амплітуди і частоти. За сигналами системи управління кожна обмотка електричного двигуна приєднується через відповідні силові транзистори інвертора до позитивного та негативного полюсів ланки постійного струму. Тривалість підключення кожної обмотки в межах періоду проходження імпульсів модулюється за синусоїдальним законом. Найбільша ширина імпульсів забезпечується в середині напівперіоду, а до початку та кінця напівперіоду зменшується. Таким чином, система управління забезпечує широтно-імпульсну модуляцію (ШІМ) напруги, що прикладається до обмоток двигуна. Амплітуда та частота напруги визначаються параметрами модулюючої синусоїдальної функції.
При високій несучій частоті ШІМ (2...15 кГц) обмотки двигуна внаслідок їх високої індуктивності працюють як фільтр. Тому в них протікають практично синусоїдальні струми.
У схемах перетворювачів з керованим випрямлячем (1) зміна амплітуди напруги uі може досягатися регулюванням величини постійної напруги u d, а зміна частоти – режимом роботи інвертора.
При необхідності на виході автономного інвертора встановлюється фільтр для згладжування пульсацій струму. (У схемах перетворювачів на IGBT через низький рівень вищих гармонік у вихідній напрузі потреба у фільтрі практично відсутня.)
Таким чином, на виході перетворювача частоти формується трифазна (або однофазна) змінна напруга змінної частоти і амплітуди (U вих = var, f вих = var).
Довжина та відстань Маса Заходи об'єму сипких продуктів і продуктів харчування Площа Об'єм та одиниці виміру в кулінарних рецептах Температура Тиск, механічна напруга, модуль Юнга Енергія та робота Потужність Сила Час Лінійна швидкість Плоский кут Теплова ефективність та паливна економічність Числа Одиниці виміру кількості інформації Курси жіночого одягу та взуття Розміри чоловічого одягу та взуття Кутова швидкість і частота обертання Прискорення Кутове прискорення Щільність Питомий об'єм Момент інерції Момент сили Обертовий момент Питома теплота згоряння (за масою) Щільність енергії та питома теплота згоряння палива (за об'ємом) Різниця температур Коефіці опір Питома теплопровідність Питома теплоємність Енергетична експозиція, потужність теплового випромінювання Щільність теплового потоку Коефіцієнт тепловіддачі Об'ємна витрата Масова витрата Молярна витрата Щільність потоку маси Молярна концентрація Масова до онцентрація в розчині Динамічна (абсолютна) в'язкість Кінематична в'язкість Поверхневий натяг Паропроникність Паропроникність, швидкість переносу пари Рівень звуку Чутливість мікрофонів Рівень звукового тиску (SPL) Яскравість Сила світла Освітленість Роздільна здатність в комп'ютерній графіці діоптріях та збільшення лінзи (×) Електричний заряд Лінійна щільність заряду Поверхнева щільність заряду Об'ємна щільність заряду Електричний струм Лінійна щільність струму Поверхнева щільність струму Напруженість електричного поля Електростатичний потенціал і напруга Електричний опір Удельний електричний опір Електрична в dBm (дБм або дБмВт), dBV (дБВ), ватах та ін. одиницях Магніторушійна сила ок Магнітна індукція Потужність поглиненої дози іонізуючого випромінювання Радіоактивність. Радіоактивний розпад Радіація. Експозиційна доза: Радіація. Поглинена доза Десяткові приставки Передача даних Типографіка та обробка зображень Одиниці виміру об'єму лісоматеріалів Обчислення молярної маси Періодична система хімічних елементів Д. І. Менделєєва
1 оборотів за хвилину [об/хв] = 6,00000000000002 градусів за секунду [°/с]
Вихідна величина
Перетворена величина
радіан на секунду радіан на добу радіан на годину радіан на хвилину градус на добу градус на годину градус на хвилину градус на секунду обертів на добу обертів на годину обертів на хвилину обертів на секунду обертів на рік обертів на місяць обертів на тиждень градусів на рік градусів на місяць градусів на тиждень радіан на рік радіан на місяць радіан на тиждень
Детальніше про кутову швидкість

Загальні відомості
Кутова швидкість – це векторна величина, що визначає швидкість обертання тіла щодо осі обертання. Цей вектор спрямований перпендикулярно до площини обертання і визначається за допомогою правила буравчика. Кутову швидкість вимірюють як відношення між кутом, на який перемістилося тіло, тобто кутовим зміщенням, і часом на це витраченим. У системі СІ кутове прискорення вимірюють у радіанах за секунду.
Кутова швидкість у спорті
Кутова швидкість часто використовується у спорті. Наприклад, спортсмени зменшують або збільшують кутову швидкість руху ключки для гольфу, біти або ракетки, щоб покращити результати. Кутова швидкість пов'язана з лінійною швидкістю так, що з усіх точок на відрізку, що обертається навколо точки на цьому відрізку, тобто навколо центру обертання, найвіддаленіша точка від цього центру рухається з найвищою лінійною швидкістю. Так, наприклад, якщо ключка для гольфу обертається, то кінець цієї ключки, найбільше віддалений від центру обертання, рухається з найвищою лінійною швидкістю. У той же час усі крапки на цьому відрізку рухаються з однаковою кутовою швидкістю. Тому подовжуючи ключку, біту, або ракетку, спортсмен також збільшує лінійну швидкість, а відповідно швидкість удару, що передається м'ячу, так що він може пролетіти на більшу відстань. Укорочуючи ракетку чи ключку, навіть перехопивши її нижче, ніж зазвичай, навпаки уповільнюють швидкість удару.


Високі люди з довгими кінцівками мають перевагу щодо лінійної швидкості. Тобто, пересуваючи ноги з однаковою кутовою швидкістю, вони рухають ступні з вищою лінійною швидкістю. Те саме відбувається і з їхніми руками. Така перевага може бути однією з причин того, що в первісних суспільствах чоловіки займалися полюванням частіше, ніж жінки. Ймовірно, через це також у процесі еволюції виграли вищі люди. Довгі кінцівки допомагали не лише в бігу, а й під час полювання – довгі руки кидали списи та каміння з більшою лінійною швидкістю. З іншого боку, довгі руки та ноги можуть бути незручністю. Довгі кінцівки мають більшу вагу і для їхнього переміщення потрібна додаткова енергія. Крім того, коли людина швидко біжить, довгі ноги швидше рухаються, а значить, при зіткненні з перешкодою удар буде сильнішим, ніж у людей з короткими ногами, які рухаються з тією ж лінійною швидкістю.
У гімнастиці, фігурному катанні та пірнанні також використовують кутову швидкість. Якщо спортсмен знає кутову швидкість, то легко визначити кількість переворотів та інших акробатичних трюків під час стрибка. Під час перекидів спортсмени зазвичай притискають ноги та руки якомога ближче до корпусу, щоб зменшити інерцію та збільшити прискорення, а значить і кутову швидкість. З іншого боку, під час пірнання чи приземлення, судді дивляться, як спортсмен приземлився. На високій швидкості важко регулювати напрямок польоту, тому спортсмени спеціально уповільнюють кутову швидкість, трохи витягаючи від корпусу руки та ноги.
Спортсмени, які займаються метанням диска чи молота, також контролюють лінійну швидкість за допомогою кутової. Якщо просто кинути молот, не обертаючи його по колу на довгому сталевому дроті, що збільшує лінійну швидкість, то кидок буде не таким сильним, тому молот спочатку розкручують. Олімпійські спортсмени повертаються навколо своєї осі від трьох до чотирьох разів, щоби збільшити кутову швидкість до максимально можливої.
Кутова швидкість та зберігання даних на оптичних носіях

Під час запису даних на оптичних носіях, наприклад на компакт дисках (CD), для вимірювання швидкості запису та зчитування даних у приводі також використовуються кутова та лінійна швидкості. Існує кілька способів запису даних, під час яких використовують змінну чи постійну лінійну чи кутову швидкість. Так, наприклад, режим постійної лінійної швидкості(Англійською - Constant Linear Velocity або CVL) - один з основних методів запису дисків, при якому дані записують з однаковою швидкістю по всій поверхні диска. Під час запису в режимі зональної постійної лінійної швидкості(Англійською - Zone Constant Linear Velocity або ZCLV) постійна швидкість підтримується під час запису на певній частині, тобто зоні диска. У цьому випадку диск уповільнює обертання під час запису на зовнішніх зонах. Режим частково постійної кутової швидкості(Partial Constant Angular Velocity або PCAV) дозволяє здійснювати запис із поступовим збільшенням кутової швидкості, доки вона не досягне певного порогу. Після цього кутова швидкість стає постійною. Останній режим запису – режим постійної кутової швидкості(Constant Angular Velocity або CAV). У цьому режимі під час запису на всій поверхні диска підтримується однакова кутова швидкість. При цьому лінійна швидкість збільшується в міру того, як головка, що записує, переміщається все далі і далі до краю диска. Цей режим використовується також під час запису грампластинок та комп'ютерних жорстких дисків.
Кутова швидкість у космосі
На відстані 35786 кілометрів (22236 миль) від Землі знаходиться орбіта, на якій обертаються супутники. Це особлива орбіта, тому що тіла, що обертаються на ній в одному напрямку із Землею, проходять всю орбіту приблизно за такий самий час, який потрібний Землі, щоб зробити повне коло навколо своєї осі. Це трохи менше 24 годин, тобто один сидеричний день. Так як кутова швидкість обертання тіл на цій орбіті дорівнює кутовий швидкості обертання Землі, то спостерігачам із Землі здається, що ці тіла не рухаються. Така орбіта називається геостаціонарний.
На цю орбіту зазвичай виводять супутники, які відстежують зміни погоди (метеорологічні супутники), супутники, які стежать за змінами в океані та супутники зв'язку, які забезпечують телевізійне та радіомовлення, телефонний зв'язок та супутниковий Інтернет. Геостаціонарну орбіту часто використовують для супутників тому, що антени, один раз спрямовані на супутник, не потрібно спрямовувати вдруге. З іншого боку, з їх використанням пов'язані такі незручності, як необхідність мати пряме поле видимості між антеною та супутником. Крім того, геостаціонарна орбіта знаходиться далеко від Землі і для передачі сигналу необхідно використовувати потужніші передавачі, ніж ті, що використовуються для передачі з нижчих орбіт. Сигнал надходить із затримкою приблизно в 0,25 секунд, що помітно для користувачів. Наприклад, під час трансляції новин кореспонденти у віддалених районах зазвичай зв'язуються зі студією супутниковим каналом; при цьому помітно, що коли телеведучий ставить їм питання, вони відповідають із затримкою. Попри це супутники на геостаціонарній орбіті широко використовуються. Наприклад, донедавна зв'язок між континентами здійснювався, головним чином, за допомогою супутників. Зараз її в основному замінили міжконтинентальні кабелі, прокладені океанським дном; проте супутниковий зв'язок досі застосовують у віддалених районах. Останні двадцять років супутники зв'язку також забезпечують доступ до Інтернету, особливо у віддалених місцях, де немає наземної інфраструктури зв'язку.

Термін служби супутника переважно визначається кількістю палива на борту, необхідним для періодичної корекції орбіти. Кількість палива в супутниках обмежена, тому коли воно закінчується, супутники виводять із експлуатації. Найчастіше їх переводять на орбіту поховання, тобто орбіту, набагато вищу за геостаціонарну. Це – дорогий процес; проте якщо залишати непотрібні супутники на геостаціонарній орбіті, це загрожує ймовірністю зіткнень коїться з іншими супутниками. Місце на геостаціонарній орбіті обмежене, тому старі супутники, залишені на орбіті, займатимуть місце, яке міг би використовувати новий супутник. У зв'язку з цим у багатьох країнах існують норми, що вимагають від власників супутників підписати договір про те, що наприкінці експлуатації супутник виведуть на орбіту поховання.
Unit Converter articles були edited and illustrated by Анатолій Золотков
Ви вагаєтесь у перекладі одиниці виміру з однієї мови на іншу? Колеги готові допомогти вам. Опублікуйте питання у TCTermsі протягом кількох хвилин ви отримаєте відповідь.
Розрахунки для переведення одиниць у конвертері « Кутова швидкість та частота обертання» виконуються за допомогою функцій unitconversion.org.