Електродвигуни постійного струмуможуть мати незалежне, паралельне, послідовне чи змішане збудження (рис. 6.1).
Рис. 6.1. Схеми електродвигунів постійного незалежного струму ( а),
паралельного ( б), послідовного ( в) та змішаного ( г) порушення
(верхня частина схеми "в" належить схемі "а")
В електродвигуні паралельного збудження обмотка збудження приєднується паралельно до затискачів якоря. Але струм, що протікає по цій обмотці, на відміну від струму якоря не залежить від навантаження і визначається прикладеним до якоря напругою та загальним опором ланцюга збудження. З цієї причини електродвигун паралельного збудження називають також електродвигуном із незалежним збудженням.
Обертальний момент Мдвигуна постійного струму та його ЕРС Евизначаються за формулами
М= до Ф Iя; Е= кФω,
де до – конструктивний коефіцієнт двигуна;
Ф - магнітний потік, Вб;
Iя - струм якоря, А.
ω – кутова швидкість, рад/с.
Рівняння електромеханічної ω = ƒ ( Iя) і механічної ω = ƒ ( М) характеристик мають вигляд
ω = U/ (КФ) - ( Rя + Rр) / (до Ф) Iя;
ω = U/ (КФ) - ( Rя + Rр) / (до 2 Ф 2) М.
Кутова швидкість ідеального холостого ходу (при Iя = 0 або М = 0)
ω 0 = U/ (КФ).
На рис. 6.2 представлені механічні характеристики двигуна постійного струму із незалежним збудженням (ДПТ НВ) у всіх режимах роботи. Характерними точками характеристик у руховому режимі є: точка ідеального холостого ходу (ω 0 , М= 0); точка номінального режиму (? н, Мн); крапка короткого замикання (ω = 0, М = Мк).
Жорсткість механічної характеристики визначається потоком збудження та опором якірного ланцюга:
β = d M/ dω = - до 2 Ф 2 / ( Rя + Rр) = - Мдо/ω.
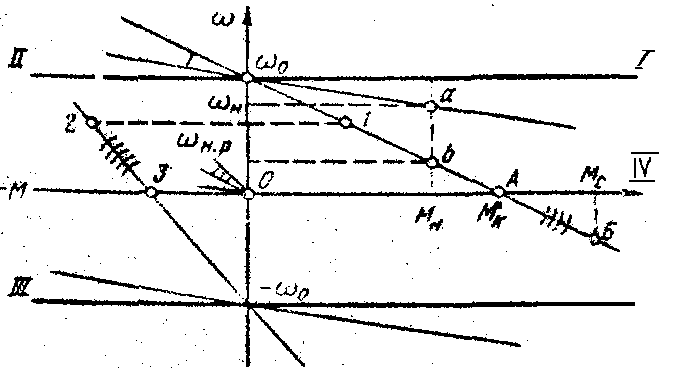
Рис. 6.2. Поєднані механічні характеристики двигуна постійного струму з незалежним збудженням
Найбільше значення модуля жорсткості відповідає природній механічній характеристиці, оскільки струм збудження дорівнює номінальному та регулювальний опір Rр = 0. У міру збільшення опору реостату Rр нахил механічної характеристики зростає, а кутова швидкість знижується. При заданому значенні опору Rр і номінальному моменті Мн кутова швидкість двигуна
ω н.р = ω 0 (1 – Iн ( Rя + Rр) / Uн.
Для розрахунку механічних характеристик необхідно знати опір якоря двигуна Rя, яке задається у каталогах. За відсутності заводських даних величину Rя знаходять орієнтовно за формулою
Rя = 0,5 (1 – ŋ н) ( Uн/ Iн).
Так як механічні характеристики ДПТ НВ прямолінійні, для їх побудови достатньо мати дві точки:
1) ω = ω 0 та М = 0,
2) ω = ω н (або ω = ω н.р) та М = Мн.
Для ДПТ НВ можливі наступні три режими електричного гальмування.
1. Рекуперативне гальмування, що відбувається, коли швидкість двигуна вище швидкості ідеального холостого ходу. Воно є найбільш економічним, оскільки енергія гальмування передається електричну мережу. Механічні характеристики у цьому режимі є продовженням відповідних характеристик рухового режиму у II квадранті. Схема двигуна при рекуперативному гальмуванні не змінюється.
2. Динамічне гальмування. Якір двигуна відключається від мережі та замикається на опір. При цьому механічна енергія рухомих частин (механізму та якоря двигуна) перетворюється на електричну, яка втрачається у вигляді теплової енергії в опорах якірного ланцюга. Механічні характеристики в даному режимі гальмування проходять через початок координат (рис. 6.2 – лінії з трьома засічками).
3. Гальмування противключеннямздійснюється двома способами:
1) введенням великого опору в ланцюг якоря.При цьому крутний момент двигуна стає меншим, ніж статичний момент навантаження. Мс. Двигун зупиняється (у точці А), а потім під дією моменту Мз починає обертатися в іншому напрямку, розвиваючи гальмівний момент; у точці Б настає встановлений режим. Механічні характеристики є продовженням відповідних характеристик рухового режиму (на рис. 6.2 – лінії із чотирма засічками);
2) гальмування перемиканням полярності обмотки якоря по ходу. Двигун, що працює у точці 1 після перемикання перейде на реостатну характеристику в точку 2. По лінії 2–3 відбувається гальмування (лінія із п'ятьма засічками). У точці 3 двигун зупиняється і його слід відключити від мережі, щоб уникнути переходу в руховий режим із обертанням у зворотному напрямку.
У двигуні постійного струму з послідовним збудженнямде-нямСтрум якоря одночасно є і струмом збудження. Магнітний потік збудження зростає зі збільшенням навантаження, внаслідок чого кутова швидкість знижується відповідно до рівняння (6.1) та механічна характеристикадвигуна буде м'якою (рис. 6.3). Завдяки цьому ДПТ НВ порівняно легко та плавно долає перевантаження та має високий пусковий момент. Дані властивості двигуна дозволяють широко застосовувати його у приводі транспортних механізмів. Механічні характеристики двигуна значно пом'якшуються при введенні в ланцюг якоря реостату (рис. 6.3 лінії з однією засічкою).
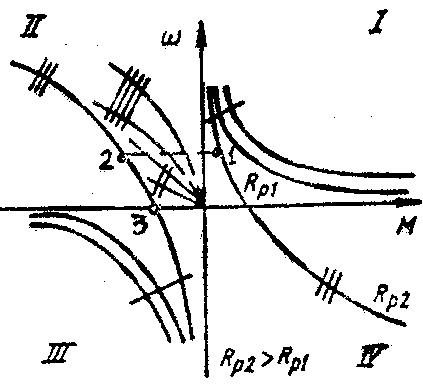
Рис. 6.3. Механічні характеристики двигуна постійного струму
з послідовним збудженням
У ДПТ ПВ не можна здійснити режим гальмування рекуперативного, оскільки в ньому відсутня швидкість ідеального холостого ходу.
Динамічне гальмування може здійснюватися за схемою із самозбудженням та з незалежним збудженням. У першому випадку якір та обмотка збудження відключаються від мережі та замикаються на реостат. Щоб уникнути розмагнічування машини, необхідно переключити обмотку збудження (або якір) таким чином, щоб напрям струму в обмотці збудження не змінилося. У цьому випадку машина самозбуджується при цьому опорі ланцюга якоря лише за певного значення кутовий швидкості; збудившись, вона створює гальмівний момент. Механічні характеристики нелінійні (на рис. 6.3 – криві із чотирма засічками).
Механічні характеристики двигуна в режимі динамічного гальмування із незалежним збудженням аналогічні відповідним характеристикам двигуна із незалежним збудженням (на рис. 6.3 – лінії із двома засічками). Такий спосіб гальмування знайшов широке застосуванняа перший спосіб використовують рідко, в основному як аварійний, наприклад, при зникненні напруги мережі.
Гальмування противключенням здійснюється, як у ДПТ НВ, двома способами:
1) включенням у ланцюг якоря великого опору;
2) зміною полярності обмотки якоря, залишивши напрямок струму в обмотці збудження без зміни.
При першому способі механічна характеристика буде продовженням характеристики, що відповідає руховому режиму (рис. 6.3 – лінія з трьома засічками). При другому способі гальмування здійснюється по лінії 1 –2–3 .
Регулює швидкість електроприводів постійного струму.Швидкість ДПТ НВ можна регулювати:
1) шляхом зміни опору в ланцюзі якоря;
2) зміною потоку збудження;
3) зміною напруги, що підводиться до якоря.
Регулювання за першим способоммає суттєві недоліки:
- зменшується жорсткість механічних характеристик при зниженні кутової швидкості, а втрати потужності в головному ланцюзі зростають;
- Діапазон регулювання обмежений, особливо при малих навантаженнях;
- Невеликі плавність і точність регулювання.
З цих причин такий спосіб регулювання приводу постійного струму використовується рідко.
за другому способуможна регулювати магнітний потік тільки у бік зменшення (оскільки в номінальному режимі магнітна ланцюг двигуна насичена), що відповідає збільшенню швидкості вище номінальної. Можливий діапазон регулювання швидкості при цьому не перевищує 2 двигуна нормального виконання. Верхня межа швидкості обмежується механічною міцністю елементів якоря двигуна – бандажів обмотки якоря, колектора.
Основним способом регулювання швидкості ДПТ НВ є спосіб, заснований на зміні напруги, що підводиться до якоря, яке здійснюється за допомогою спеціального регульованого перетворювача. Як індивідуальні джерела живлення використовують в основному тиристорні перетворювачі. Жорсткість механічних характеристик приводу системою «перетворювач – ДПТ НВ» практично постійна. Механічні характеристики є сімейством паралельних один одному прямих. Діапазон, плавність, точність регулювання тут вища, ніж за інших способів регулювання. Тому дана система приводу застосовується для механізмів, що потребують глибокого та плавного регулювання швидкості.
Розрахунок додаткових резисторів у ланцюзі якоря ДПТ НВ.Якщо відома природна електромеханічна або механічна характеристика 1 двигуна (рис. 6.4) та його паспортні дані, то розрахунок опору Rд, при включенні якого в ланцюг якоря бажана штучна характеристика 2 пройде через точку А із заданими координатами ω і, Iі або і, М і, можна виконати наступними найбільш поширеними методами.
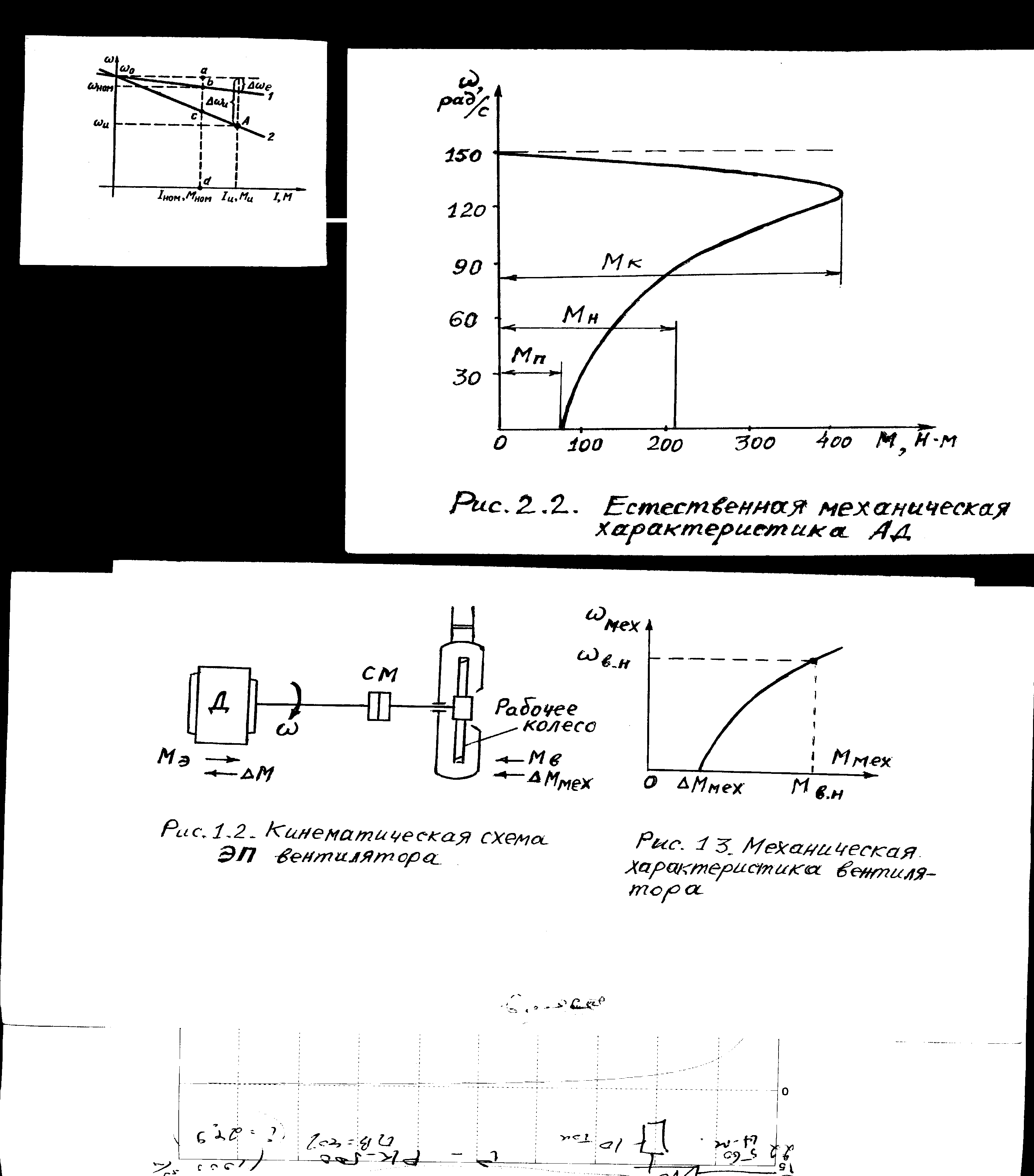
Рис. 6.4. Характеристики ДПТ НВ для розрахунку величини
регулювальних резисторів
Метод пропорцій. Запишемо відношення перепадів швидкості при струмі Iі чи моменті Мі на природній Δω е та бажаній штучній Δω та характеристиках:
Δω е / Δω і = Iі Rя / ( Iі ( Rя + Rд)) = Rя / ( Rя + Rд).
Тоді потрібна величина
Rд = Rя (Δω і / Δω е - 1).
Метод відрізківне вимагає знання значення власного опору двигуна Rя (більше того, його значення можна визначити за відомою природною характеристикою).
Запишемо вираз для швидкості двигуна на заданій штучній характеристиці (див. рис. 6.4) при номінальних струмі Iн, момент Мн, магнітному потоці Ф н та напрузі Uн:
ω і = Uн/(кФ н) (1 – Iн R/ Uн),
де Uн/(кФ н) = ω 0 .
ω і = ω 0 (1 – R / Rн).
Тут Rн = Uн/ Iн - так званий номінальний опір, що є базовою величиною при розрахунках, Ом.
Співвідношення
R / Uн = (ω 0 - ω і) / ω 0 = δ
відбиває важливу властивість ДПТ НВ: відносний перепад швидкості δ = Δω / ω 0 дорівнює відносному активному опору ланцюга якоря R / Rн.
Позначимо на рис. 6.4 характерні точки а, b,з, dі відзначимо, що 0 - ω і = Δω = ас, ω 0 = аd.Тоді R = Rн Δω / ω 0 = Rн ас/аd; Rд = Rн bз/аd; Rя = Rн аb /аd.
Таким чином, для знаходження Rд необхідно спочатку за характеристиками визначити довжини відрізків bзі аdпри номінальному струміабо моменті та розрахувати номінальний опір Rн = Uн/ Iн.
Розрахунок додаткових резисторів можна виконати також за такими формулами для заданого допустимого струму Iдод, який визначається величиною допустимого моменту Мдодатковими або умовами пуску, реверсу та гальмування.
Опір резистора Rд1 при пуску ( Е = 0)
Rд1 = ( U / Iдод) – Rя.
Опір резистора R д2 при динамічному гальмуванні
Rд2 = ( Е / Iдод) – Rя ≈ ( U / Iдод) – Rя).
Опір резистора Rд3 при реверсі або гальмуванні противмиканням
Rд3 = (( U + Е) / Iдод) – Rя ≈ (2 U / Iдод) – Rя.
приклад . ДПТ НВ типу ПБСТ-53 має такі паспортні дані: Рн = 4,8 кВт; nн = 1500 об/хв; Uн = 220 В; Iн = 24,2 А; Rя = 0,38 Ом; Iв.н = 0,8 А. Потрібно визначити:
1) опір резистора, включення якого в ланцюг якоря двигуна забезпечить проходження штучної механічної характеристики через точку з координатами і = 90 рад/с, Мн = 25 Нм;
2) опору резисторів, включення яких обмежить струм при пуску та гальмуванні противмиканням до рівня Iдоп = 3 Iн.
У машині постійного струму обмотка якоря має малий опір і при включенні до мережі виникають пускові струмиякі можуть досягати 15...20I ном. Збільшення струмів якоря вище за значення 2...2,5I ном призводить до погіршення комутації.
Крім того, динамічні зусилля, що виникають, можуть поступово зруйнувати обмотку якоря, викликати зрізання шпонок, скручування валів і т.д. Обмеження пускових струмів здійснюється за допомогою опорів r 1 , r 2 , r 3 включених в якірний ланцюг (рис.2.12). У міру розгону двигуна збільшується ЕРС, а струм знижується. Послідовно закорочуючи опори контактами КМ1, КМ2, КМЗ виконують (здійснюють) пуск. Пускова діаграма двигуна представлена на рис. 2.13.
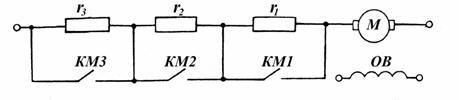
Рис. 2.13. Схема включення пускових резисторів.
Значення струмів перемикання I 1 і I 2 вибирають, виходячи з вимог технології електроприводу і комутаційної здатності двигуна. Так, приймають I 1 = (2,0...2,5)I Н і I 2 = (1,2...1,3)I Н у тих випадках, коли тривалість пуску двигуна впливає на продуктивність машини, що часто включається .
Якщо необхідно плавний пускнаприклад, пасажирських ліфтів, то значення струмів перемикання будуть зумовлені допустимими прискореннями електроприводу. У тих випадках, коли пуск рідкісний і не обмежуються умови пуску, значення струмів I 1 і I 2 можна взяти дещо більше робочих струмів (але значно менше, ніж у першому випадку, коли I 1 = (2...2,5) I н.
Значення пускових опоріврозраховують аналітичним та графічним методами. Якщо число ступенів задано, це означає, що розрахунок виконується для вже відомої стандартної контакторної панелі. Якщо кількість ступенів невідома, потрібно підібрати
Аналітичний метод розрахунку пускових опорів
При включенні двигуна до мережі розгін починається з пусковим опором R 3 = r Я + r 1 + r 2 + r 3 (рис.2.13). Цим опорам відповідає штучна електромеханічна характеристика
1 - 2 - ω 0 (рис.2.14). При струмі I 2 і швидкості 2 (точка 2) контактами КМЗ шунтується додатковий опір r 3 і струм двигуна знову збільшується до I 1 (точка 3). Пуск продовжується з опором R 3 = r Я + r 1 + r 2 за характеристикою З - 4 - о. У точці 4 цієї характеристики відбувається відключення r 2 контактом КМ2. З опіром
R 3 = r Я + r 1 двигун розганяється за характеристикою 5 - 6 - о. На швидкості ω 6 (точка 6) відключається останній опір r 1 і двигун виходить на природну електромеханічну характеристику 7 - 8 - ω про, по якій розганяється до частоти обертання, що відповідає навантаженню на валу.
Для визначення значень додаткових опорів беремо відношення струмів, що відповідають точкам 3 і 2 на кутовій швидкості 2 пускової діаграми:
![]() . (2.31)
. (2.31)
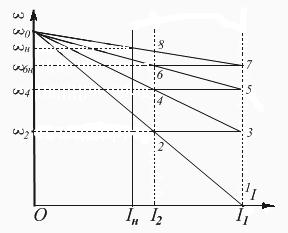
Рис. 2.14. Пускова діаграма ДПТ НВ.
Значення ЕРС двигуна в цих точках рівні, так як частота обертання ω 2 НЕ ЗМІНЮЄТЬСЯ
Після скорочення напруги отримаємо:
![]() .
.
На кутовій швидкості 4 для точок 4-5 запишемо:
![]() ;
;
тут Е4 = Е5, а струми I5 = I1, I4 = I2, отже:
![]() .
.
Аналогічно для кутової швидкості 6 (точок 6 і 7):
![]()
або ![]() .
.
Позначимо відношення струмів перемикання: , тоді
Якщо було б m ступенів, то за аналогією:
У цьому виразі число пускових щаблів m і кратність пускових струмів взаємопов'язані:
![]() (2.34) або . (2.35)
(2.34) або . (2.35)
Значення опорів кожного ступеня можна визначити так:
Порядок розрахунку пускових опорів
Якщо встановлено число ступенів m, то розрахунок опорів виконується так:
1) задаємося значенням струму I 1 і визначаємо R m:
2) знаходимо відношення струмів перемикання:
![]() , (2.37)
, (2.37)
де; Р н, U н, I н, η н - паспортні дані двигуна;
3) обчислюємо значення другого струму перемикання I 2:
і порівнюємо його з робочим струмом двигуна I с, що відповідає максимальному моменту робочої машини при пуску.
Якщо відомий робочий момент М с, то
![]() ,
,
а якщо дана потужність на валу робочої машини Р В.Р.М. , то
![]() .
.
При I 2 > (1,1...1,2)I c визначаємо опір кожного ступеня:
...![]() . (2.38)
. (2.38)
Якщо умова I 2 > 1,1I c не дотримується, то вибираємо нову
(Більше) значення I 1 і повторюємо розрахунок.
Якщо кількість ступенів опорів невідома, то розрахунок ведеться у такій послідовності:
1) задаємося значеннями струмів перемикання I 1 ,I 2 і визначаємо:
2) визначаємо число ступенів:
де; ![]() .
.
Отримане значення m (якщо воно дрібне) округляємо до
найближчого цілого числа та уточнюємо λ і струм I 2:
![]() ; .
; .
Подальший розрахунок ведеться, як у першому випадку. Після завершення розрахунків за першим чи другим варіантом необхідно перевірити правильність розрахунків. Для цього визначаємо сумарне
опір:
і порівнюємо з вихідним. Відхилення у розрахунках має бути в межах припустимої помилки – 5...7%.
Графічний метод розрахунку пускових опорів
Цей спосіб розрахунку дає наочне уявлення про значення додаткових опорів, але має істотний недолік -
точність розрахунків залежить від точності побудови пускової діаграми двигуна.
Електромеханічні характеристики для двигуна постійного струму з включеним до ланцюга якоря додатковим опором R доб. наведено на рис. 2.15.
Рис.2.15. Електромеханічні характеристики ДПТ НВ при введенні додаткових резисторів у ланцюг якоря.
Рівняння ЕРС для номінального струму та частоти обертання ω
(точка в):
Останній вираз розділимо на сФ н:
![]() . (2.39)
. (2.39)
З рис.2.15 маємо:
 (2.40)
(2.40)
Порівнюючи вирази (2.39) та (2.40), запишемо:
отже, для постійних значень I н та сФ н значення відрізка аб пропорційно . Якщо характеристика проходить через точку г , то все прикладене U н врівноважується падінням у
опорі R н:
R н носить назву номінального опору,![]() . Номінальний опір електродвигуна - е.то такий опір якірного ланцюга, при якому в момент включення (при ω=0) в обмотці якоря протікає номінальний струм. Відрізок аг пропорційний R н. Таким чином, за значенням відрізка, що відсікається характеристикою лінії номінального струму, можна розрахувати опір якірної ланцюга. Але для цього потрібно знати масштаб
. Номінальний опір електродвигуна - е.то такий опір якірного ланцюга, при якому в момент включення (при ω=0) в обмотці якоря протікає номінальний струм. Відрізок аг пропорційний R н. Таким чином, за значенням відрізка, що відсікається характеристикою лінії номінального струму, можна розрахувати опір якірної ланцюга. Але для цього потрібно знати масштаб
опорів:
де; U н, I н, Р н - номінальна напруга, Струм і потужність двигуна.
Перший спосіб визначення масштабу точніший, оскільки
відрізок аг більший, ніж відрізок аб.
При розрахунку пускових опорів двигуна постійного струму графічним методом можливі два варіанти.
1.Кількість пускових ступенів m задано.
За паспортними даними машини будуємо природну електромеханічну характеристику за двома точками (ω o , М = 0) та (I н, ω н)
(Рис. 2.16). Відкладаємо значення струмів перемикання I 1 та I 2 .
Їх значення необхідно обґрунтовувати, виходячи з вимог технології до електроприводу та комутаційної здатності двигуна. Граничне значення струму I 1 беремо рівну (2...2,5)I н. Струм I 2 = (1,2 ... 1,3) I н. Через точки, що відповідають значенням I 1 і I 2 на осі струмів проводимо дві прямі, паралельні осі частоти обертання. З'єднуємо точки 1 і ω про пряму лінію, яка перетнеться в точці 2 зі струмом I 2 .
Подальший порядок побудови від точки 2 до 3 тощо. видно з рис. 2.16. В результаті побудови необхідно потрапити в точку перетину природної електромеханічної характеристики лінії струму перемикання I 1 (точку 7). Якщо збігу не вийшло або число ступнів не дорівнює заданому, необхідно змінити значення струму I 2 або I 1 і повторити побудову.

Рис. 2.16. Графічний метод розрахунку опорів пускових
Таким чином, процес пуску двигуна в кілька щаблів, зображений на рис. 2.16 характерний тим, що струм двигуна під час пуску коливається в межах від . На початку пуску, далі, у міру прискорення двигуна зростає його ЕРС, внаслідок чого починає зменшуватися струм в ланцюзі якоря двигуна, а отже, і момент двигуна. Коли струм досягає вимикається частина пускового реостату з таким розрахунком, щоб струм двигуна знову досяг значення і т.д.
У міру виведення пускових резисторів опір ланцюга якоря зменшується, а отже, зменшується значення електромеханічної постійної, що призводить до зменшення тривалості пуску на кожному наступному ступені.
Електродвигуни постійного струму можуть мати незалежне, паралельне, послідовне чи змішане збудження (рис. 6.1).
Рис. 6.1. Схеми електродвигунів постійного незалежного струму ( а),
паралельного ( б), послідовного ( в) та змішаного ( г) порушення
(верхня частина схеми "в" належить схемі "а")
В електродвигуні паралельного збудження обмотка збудження приєднується паралельно до затискачів якоря. Але струм, що протікає по цій обмотці, на відміну від струму якоря не залежить від навантаження і визначається прикладеним до якоря напругою та загальним опором ланцюга збудження. З цієї причини електродвигун паралельного збудження називають також електродвигуном із незалежним збудженням.
Обертальний момент Мдвигуна постійного струму та його ЕРС Евизначаються за формулами
М= до Ф Iя; Е= кФω,
де до – конструктивний коефіцієнт двигуна;
Ф - магнітний потік, Вб;
Iя - струм якоря, А.
ω – кутова швидкість, рад/с.
Рівняння електромеханічної ω = ƒ ( Iя) і механічної ω = ƒ ( М) характеристик мають вигляд
ω = U/ (КФ) - ( Rя + Rр) / (до Ф) Iя;
ω = U/ (КФ) - ( Rя + Rр) / (до 2 Ф 2) М.
Кутова швидкість ідеального холостого ходу (при Iя = 0 або М = 0)
ω 0 = U/ (КФ).
На рис. 6.2 представлені механічні характеристики двигуна постійного струму із незалежним збудженням (ДПТ НВ) у всіх режимах роботи. Характерними точками характеристик у руховому режимі є: точка ідеального холостого ходу (ω 0 , М= 0); точка номінального режиму (? н, Мн); точка короткого замикання (ω = 0, М = Мк).
Жорсткість механічної характеристики визначається потоком збудження та опором якірного ланцюга:
β = d M/ dω = - до 2 Ф 2 / ( Rя + Rр) = - Мдо/ω.
Рис. 6.2. Поєднані механічні характеристики двигуна постійного струму з незалежним збудженням
Найбільше значення модуля жорсткості відповідає природній механічній характеристиці, оскільки струм збудження дорівнює номінальному та регулювальний опір Rр = 0. У міру збільшення опору реостату Rр нахил механічної характеристики зростає, а кутова швидкість знижується. При заданому значенні опору Rв номінальному моменті Мн кутова швидкість двигуна
ω н.р = ω 0 (1 – Iн ( Rя + Rр) / Uн.
Для розрахунку механічних характеристик необхідно знати опір якоря двигуна Rя, яке задається у каталогах. За відсутності заводських даних величину Rя знаходять орієнтовно за формулою
Rя = 0,5 (1 – ŋ н) ( Uн/ Iн).
Так як механічні характеристики ДПТ НВ прямолінійні, для їх побудови достатньо мати дві точки:
1) ω = ω 0 та М = 0,
2) ω = ω н (або ω = ω н.р) та М = Мн.
Для ДПТ НВ можливі наступні три режими електричного гальмування.
1. Рекуперативне гальмування, що відбувається, коли швидкість двигуна вище швидкості ідеального холостого ходу. Воно є найбільш економічним, оскільки енергія гальмування передається електричну мережу. Механічні характеристики у цьому режимі є продовженням відповідних характеристик рухового режиму у II квадранті. Схема двигуна при рекуперативному гальмуванні не змінюється.
2. Динамічне гальмування. Якір двигуна відключається від мережі та замикається на опір. При цьому механічна енергія рухомих частин (механізму та якоря двигуна) перетворюється на електричну, яка втрачається у вигляді теплової енергії в опорах якірного ланцюга. Механічні характеристики в даному режимі гальмування проходять через початок координат (рис. 6.2 – лінії з трьома засічками).
3. Гальмування противключеннямздійснюється двома способами:
1) введенням великого опору в ланцюг якоря.При цьому крутний момент двигуна стає меншим, ніж статичний момент навантаження. Мс. Двигун зупиняється (у точці А), а потім під дією моменту Мз починає обертатися в іншому напрямку, розвиваючи гальмівний момент; у точці Б настає встановлений режим. Механічні характеристики є продовженням відповідних характеристик рухового режиму (на рис. 6.2 – лінії із чотирма засічками);
2) гальмування перемиканням полярності обмотки якоря по ходу. Двигун, що працює у точці 1 після перемикання перейде на реостатну характеристику в точку 2. По лінії 2–3 відбувається гальмування (лінія із п'ятьма засічками). У точці 3 двигун зупиняється і його слід відключити від мережі, щоб уникнути переходу в руховий режим із обертанням у зворотному напрямку.
У двигуні постійного струму з послідовним збудженнямде-нямСтрум якоря одночасно є і струмом збудження. Магнітний потік збудження зростає зі збільшенням навантаження, внаслідок чого кутова швидкість знижується відповідно до рівняння (6.1) та механічна характеристика двигуна буде м'якою (рис. 6.3). Завдяки цьому ДПТ НВ порівняно легко та плавно долає перевантаження та має високий пусковий момент. Дані властивості двигуна дозволяють широко застосовувати його у приводі транспортних механізмів. Механічні характеристики двигуна значно пом'якшуються при введенні в ланцюг якоря реостату (рис. 6.3 лінії з однією засічкою).
Рис. 6.3. Механічні характеристики двигуна постійного струму
з послідовним збудженням
У ДПТ ПВ не можна здійснити режим гальмування рекуперативного, оскільки в ньому відсутня швидкість ідеального холостого ходу.
Динамічне гальмування може здійснюватися за схемою із самозбудженням та з незалежним збудженням. У першому випадку якір та обмотка збудження відключаються від мережі та замикаються на реостат. Щоб уникнути розмагнічування машини, необхідно переключити обмотку збудження (або якір) таким чином, щоб напрям струму в обмотці збудження не змінилося. У цьому випадку машина самозбуджується при цьому опорі ланцюга якоря лише за певного значення кутової швидкості; збудившись, вона створює гальмівний момент. Механічні характеристики нелінійні (на рис. 6.3 – криві із чотирма засічками).
Механічні характеристики двигуна в режимі динамічного гальмування із незалежним збудженням аналогічні відповідним характеристикам двигуна із незалежним збудженням (на рис. 6.3 – лінії з двома засічками). Такий спосіб гальмування знайшов широке застосування, а перший спосіб використовують рідко, в основному як аварійний, наприклад, при зникненні напруги мережі.
Гальмування противключенням здійснюється, як у ДПТ НВ, двома способами:
1) включенням у ланцюг якоря великого опору;
2) зміною полярності обмотки якоря, залишивши напрямок струму в обмотці збудження без зміни.
При першому способі механічна характеристика буде продовженням характеристики, що відповідає руховому режиму (рис. 6.3 – лінія з трьома засічками). При другому способі гальмування здійснюється по лінії 1 –2–3 .
Регулює швидкість електроприводів постійного струму.Швидкість ДПТ НВ можна регулювати:
1) шляхом зміни опору в ланцюзі якоря;
2) зміною потоку збудження;
3) зміною напруги, що підводиться до якоря.
Регулювання за першим способоммає суттєві недоліки:
- зменшується жорсткість механічних характеристик при зниженні кутової швидкості, а втрати потужності в головному ланцюзі зростають;
- Діапазон регулювання обмежений, особливо при малих навантаженнях;
- Невеликі плавність і точність регулювання.
З цих причин такий спосіб регулювання приводу постійного струму використовується рідко.
за другому способуможна регулювати магнітний потік тільки у бік зменшення (оскільки в номінальному режимі магнітна ланцюг двигуна насичена), що відповідає збільшенню швидкості вище номінальної. Можливий діапазон регулювання швидкості при цьому не перевищує 2 двигуна нормального виконання. Верхня межа швидкості обмежується механічною міцністю елементів якоря двигуна – бандажів обмотки якоря, колектора.
Основним способом регулювання швидкості ДПТ НВ є спосіб, заснований на зміні напруги, що підводиться до якоря, яке здійснюється за допомогою спеціального регульованого перетворювача. Як індивідуальні джерела живлення використовують в основному тиристорні перетворювачі. Жорсткість механічних характеристик приводу системою «перетворювач – ДПТ НВ» практично постійна. Механічні характеристики є сімейством паралельних один одному прямих. Діапазон, плавність, точність регулювання тут вища, ніж за інших способів регулювання. Тому дана система приводу застосовується для механізмів, що потребують глибокого та плавного регулювання швидкості.
Розрахунок додаткових резисторів у ланцюзі якоря ДПТ НВ.Якщо відома природна електромеханічна або механічна характеристика 1 двигуна (рис. 6.4) та його паспортні дані, то розрахунок опору Rд, при включенні якого в ланцюг якоря бажана штучна характеристика 2 пройде через точку А із заданими координатами ω і, Iі або і, М і, можна виконати наступними найбільш поширеними методами.
Рис. 6.4. Характеристики ДПТ НВ для розрахунку величини
регулювальних резисторів
Метод пропорцій. Запишемо відношення перепадів швидкості при струмі Iі чи моменті Мі на природній Δω е та бажаній штучній Δω та характеристиках:
Δω е / Δω і = Iі Rя / ( Iі ( Rя + Rд)) = Rя / ( Rя + Rд).
Тоді потрібна величина
Rд = Rя (Δω і / Δω е - 1).
Метод відрізківне вимагає знання значення власного опору двигуна Rя (більше того, його значення можна визначити за відомою природною характеристикою).
Запишемо вираз для швидкості двигуна на заданій штучній характеристиці (див. рис. 6.4) при номінальних струмі Iн, момент Мн, магнітному потоці Ф н та напрузі Uн:
ω і = Uн/(кФ н) (1 – Iн R/ Uн),
де Uн/(кФ н) = ω 0 .
ω і = ω 0 (1 – R / Rн).
Тут Rн = Uн/ Iн - так званий номінальний опір, що є базовою величиною при розрахунках, Ом.
Співвідношення
R / Uн = (ω 0 - ω і) / ω 0 = δ
відбиває важливу властивість ДПТ НВ: відносний перепад швидкості δ = Δω / ω 0 дорівнює відносному активному опору ланцюга якоря R / Rн.
Позначимо на рис. 6.4 характерні точки а, b,з, dі відзначимо, що 0 - ω і = Δω = ас, ω 0 = аd.Тоді R = Rн Δω / ω 0 = Rн ас/аd; Rд = Rн bз/аd; Rя = Rн аb /аd.
Таким чином, для знаходження Rд необхідно спочатку за характеристиками визначити довжини відрізків bзі аdпри номінальному струмі або моменті та розрахувати номінальний опір Rн = Uн/ Iн.
Розрахунок додаткових резисторів можна виконати також за такими формулами для заданого допустимого струму Iдод, який визначається величиною допустимого моменту Мдодатковими або умовами пуску, реверсу та гальмування.
Опір резистора Rд1 при пуску ( Е = 0)
Rд1 = ( U / Iдод) – Rя.
Опір резистора R д2 при динамічному гальмуванні
Rд2 = ( Е / Iдод) – Rя ≈ ( U / Iдод) – Rя).
Опір резистора Rд3 при реверсі або гальмуванні противмиканням
Rд3 = (( U + Е) / Iдод) – Rя ≈ (2 U / Iдод) – Rя.
приклад . ДПТ НВ типу ПБСТ-53 має такі паспортні дані: Рн = 4,8 кВт; nн = 1500 об/хв; Uн = 220 В; Iн = 24,2 А; Rя = 0,38 Ом; Iв.н = 0,8 А. Потрібно визначити:
1) опір резистора, включення якого в ланцюг якоря двигуна забезпечить проходження штучної механічної характеристики через точку з координатами і = 90 рад/с, Мн = 25 Нм;
2) опору резисторів, включення яких обмежить струм при пуску та гальмуванні противмиканням до рівня Iдоп = 3 Iн.