Принцип дії асинхронного двигуна заснований на використанні магнітних полів, що обертаються, і основних законів електротехніки.
При включенні двигуна в мережу трифазного струму в статорі утворюється постійне за величиною, але магнітне поле, що обертається в просторі, силові лінії якого перетинають витки обмоток ротора. При цьому згідно із законом електромагнітної індукції, в обмотці ротора індукується ЕРС, величина якої пропорційна частоті перетину силових ліній. Під дією індукованої ЕРС у короткозамкненому роторі виникають значні струми.
Відповідно до закону Ампера на провідники зі струмом, що у магнітному полі, діють механічні сили, які за принципом Ленца прагнуть усунути причину, що викликає індукований струм, тобто. перетин стрижнів обмотки ротора силовими лініями обертового поля. Таким чином, механічні сили, що виникли, будуть розкручувати ротор у напрямку обертання поля, зменшуючи швидкість перетину стрижнів обмотки ротора магнітними силовими лініями.
Досягти частоти обертання поля в реальних умовах ротор не може, тому що тоді стрижні його обмотки виявилися б нерухомими щодо магнітних силових ліній та індуковані струми в обмотці ротора зникли б. Тому ротор обертається із частотою, меншою частоти обертання поля, тобто. не синхронно з полем або асинхронно.
Для зміни напрямку обертання ротора асинхронного двигуна необхідно змінити напрямок обертання магнітного поля, тобто. змінити порядок чергування фаз обмоток статора перемиканням будь-яких двох із трьох фазних проводів, що живлять двигун.
Частота обертання магнітного поля n 1 (синхронна частота обертання) жорстко залежить від частоти f 1 підводиться напруги та кількості пар полюсів pдвигуна: n 1 = 60f 1 /p.
З цього випливає, що при прийнятій в Росії промисловій частоті напруги живлення ( f 1 = 50 Гц) найбільше число оборотів магнітного поля виявляється рівним 3000 об/хв p= 1. При збільшенні числа пар полюсів частота обертання магнітного поля зменшується, отже, знижується і частота обертання ротора. При p= 2,n= 1500 об/хв і т.д.
Якщо сили, що гальмують обертання ротора, невеликі, ротор обертається з частотою, близькою до частоти обертання поля. При збільшенні навантаження на валу двигуна частота обертання ротора зменшується, струми у витках його обмоток збільшуються, що призводить до зростання моменту двигуна, що обертає. При певній частоті обертання ротора встановлюється рівновага між гальмівнимі крутним моментами.
Ковзання та частота обертання ротора
Позначимо через n 2 частоту обертання ротора асинхронного двигуна, а через n 1 частоту обертання магнітного поля. У попередньому розділі було показано, що n 2 <n 1 .
Частоту обертання магнітного поля щодо ротора, тобто. різниця n 1 –n 2 , називають ковзанням. Зазвичай ковзання виражають у частках частоти обертання поля та позначають символом s:
s = (n 1 – n 2)/ n 1 .
Ковзання залежить від навантаження на валу двигуна. При номінальному навантаженні його значення становить близько 0,05 у машин невеликої потужності та близько 0,02 у потужних двигунів.
З рівності, наведеної вище, легко знайдемо співвідношення: n 2 =n 1 (1 –s). І після простого перетворення отримаємо вираз для частоти двигуна, зручний для подальших міркувань: n 2 = 60f 1 (1 ‑s)/p.
Оскільки при нормальному режимі роботи двигуна ковзання невелике, частота обертання двигуна мало відрізняється від частоти обертання поля.
Насправді ковзання часто виявляється у відсотках:
b = 100 (n 1 – n 2)/ n 1 .
Більшість асинхронних двигунів ковзання коливається в інтервалі 2 –6 %.
Ковзання є однією з найважливіших характеристик двигуна; через нього виражаються ЕРС і струм ротора, крутний момент, частота обертання ротора.
При нерухомому ( n 2 = 0) ротор s= 1. Таким ковзанням має двигун у момент пуску.
Як було зазначено, ковзання залежить від моменту навантаження на валу двигуна; отже, і частота обертання ротора залежить від гальмівного моменту на валу. Номінальне значення частоти обертання ротора n 2,ном, що відповідає розрахунковому значенню навантаження Мн, частоти f 1,ном і напруги мережі U 1,ном, вказується на заводському щитку, що кріпиться на корпусі асинхронного двигуна.
Частота обертання асинхронного двигуна
n = n 1 (1 – s) = (60f 1 /p) (1-s) (85)
З цього виразу видно, що її можна регулювати, змінюючи частоту f 1напруги живлення, кількість пар полюсів рі
ковзання s. Останнє при заданих значеннях моменту на валу М вн і частоти f 1 можна змінювати шляхом включення ланцюг обмотки ротора реостата.
Регулювання шляхом зміни частоти напруги живлення.Цей спосіб вимагає наявності перетворювача частоти, якого повинен бути підключений асинхронний двигун. На основі керованих напівпровідникових вентилів (тиристорів) створено статичні перетворювачі частоти та побудовано ряд дослідних електровозів та тепловозів з асинхронними двигунами, частота обертання яких регулюється шляхом зміни частоти напруги живлення. Такий спосіб регулювання частоти обертання ротора асинхронного двигуна є дуже перспективним.
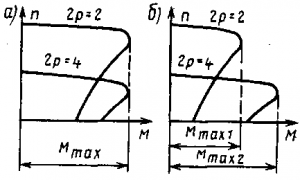
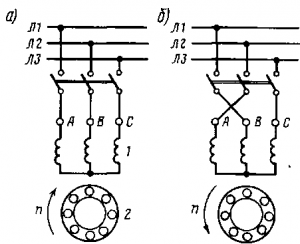
Регулює шляхом зміни числа пар полюсів.Цей спосіб дозволяє отримати ступінчасту зміну частоти обертання. З цією метою окремі котушки 1, 2 і 3, 4, що становлять одну фазу (рис. 266), перемикаються так, щоб змінювалося відповідним чином напрям струму в них (наприклад, з послідовного приголосного з'єднання на зустрічне). При відповідному включенні котушок (рис. 266 а) число полюсів дорівнює чотирьом, при зустрічному включенні (рис. 266 б) - двом. Котушки двох інших фаз, зсунуті в просторі на 120 °, з'єднуються таким же чином. Таке ж зменшення числа полюсів можна здійснити при перемиканні котушок із послідовного на паралельне з'єднання. При зміні числа полюсів змінюється частота обертання n 1 магнітного поля двигуна, отже, і частота обертання n його ротора. Якщо потрібно мати три або чотири частоти обертання n 1 то на статорі розташовують ще одну обмотку, при перемиканні якої можна отримати ще дві частоти. Існують двигуни, які забезпечують зміну частоти обертання n 1 при постійному найбільшому моменті або приблизно постійної потужності (рис. 267).
В асинхронному двигуні число полюсів ротора повинно дорівнювати числу полюсів статора. У короткозамкнутому роторі ця умова виконується автоматично і при перемиканні обмотки статора жодних змін в обмотці ротора виконувати не потрібно.

У двигуні ж з фазним ротором у цьому випадку треба було б змінювати число полюсів обмотки ротора, що сильно ускладнило його конструкцію, тому такий спосіб регулювання частоти обертання використовується тільки в двигунах з коротко-замкненим ротором. Такі двигуни мають великі габаритні розміри та масу в порівнянні з двигунами загального застосування, а отже, і більшу вартість. Крім того, регулювання здійснюється великими ступенями; при частоті f 1 = 50 Гц частота обертання поля n 1 при перемиканнях змінюється щодо 3000:1500:1000:750.
Регулює шляхом включення в ланцюг ротора реостата.При включенні в ланцюг обмотки ротора реостата з різним опором (R п4 R пЗ R п2 і т. д.) отримуємо ряд реостатних механічних характеристик 4, 3 і 2 двигуна. При цьому деякому моменту навантаження М ном (рис. 268) будуть відповідати менші частоти обертання n 4 , n 3 , n 2 і т. д., ніж частота n е при роботі двигуна на природній характеристиці 1 (при R п = 0). Цей спосіб регулювання може бути використаний тільки для двигунів із фазним ротором. Він дозволяє плавно змінювати частоту обертання у межах. Недоліками є великі втрати енергії в регулювальному реостаті, тому його використовують тільки при короткочасних режимах роботи двигуна (при пуску тощо).
Зміна напряму обертання.Для зміни напрямку обертання двигуна потрібно змінити напрямок обертання магнітного поля, створюваного обмотками статора. Це досягається зміною порядку чергування струму фазах обмотки статора. Наприклад, якщо максимуми струмів надходять у фази обмотки статора 1 (рис. 269, а) в наступному порядку: фаза А - фаза - фаза С, то ротор 2 двигуна буде обертатися за годинниковою стрілкою. Якщо ж подавати їх у такій послідовності: фаза - фаза А - фаза С, то ротор почне обертатися проти годинникової стрілки. Для цього необхідно змінити схему з'єднання обмоток статора з мережею, переключивши дві будь-які фази (дроти). Наприклад, затискач А обмотки статора, який раніше був з'єднаний з лінійним проводом Л1, потрібно переключити на провід Л2, а затискач В обмотки, з'єднаний раніше з Л2, переключити на провід Л1 (рис. 269,б). Таке перемикання можна здійснити звичайним перемикачем.
Електродвигуни. Асинхронні двигуни
Асинхронними двигунаминазиваються електричні машини, що мають принаймні дві обмотки, в яких змінна напруга зрушена по фазі відносно один одного.
Принцип дії
В асинхронних системах з'являється можливість створити в механічно нерухомому пристрої обертове магнітне поле. Котушка, підключена до джерела змінного струму, утворює магнітне поле, що пульсує, тобто магнітне поле, що змінюється за значенням і напрямом.
Рис. 16.6. Підключення котушок двигуна до джерела трифазної напруги
Рис. 16.7. Графік зміни струмів трифазної системи
У циліндрі з внутрішнім діаметром D розміщують на поверхні три котушки, просторово зміщені один на одного на 120°. Котушки підключені до джерела трифазної напруги (рис. 16.6). На рис. 16.7 показаний графік зміни миттєвих струмів, що утворюють трифазну систему.
Кожна з котушок створює пульсуюче магнітне поле. Магнітні поля котушок, взаємодіючи один з одним, утворюють магнітне поле, що результує обертається, що характеризується вектором результуючої магнітної індукції .
На рис. 16.8 зображені вектори магнітної індукції кожної фази та результуючий вектор, побудовані для трьох моментів часу t1, t2, t3. Позитивні напрямки осей котушок позначені +1, +2, +3.
У момент t = t 1 струм і магнітна індукція в котушці А-Х позитивні та максимальні, у котушках B-Y та C-Z - однакові та негативні. Вектор результуючої магнітної індукції дорівнює геометричній сумі векторів магнітних індукцій котушок і збігається з віссю котушки А-Х. У момент t = t 2 струми в котушках А-Х та C-Z однакові за величиною та протилежні за напрямом. Струм у фазі дорівнює нулю. Результативний вектор магнітної індукції повернувся за годинниковою стрілкою на 30°.
Рис. 16.8. Вектор магнітної індукції для трьох моментів часу.
У момент t = t 3 струми в котушках А-Х і B-Y однакові за величиною і позитивні, струм у фазі C-Z максимальний і від'ємний, вектор результуючого магнітного поля розміщується в негативному напрямку осі котушки C-Z. За період змінного струму вектор магнітного поля, що результує, повернеться на 360°. Лінійна швидкість руху вектора магнітної індукції
де – частота змінної напруги; Т – період синусоїдального струму; пг – частота обертання магнітного поля або синхронна частота обертання. За період Т магнітне поле переміщається на відстань де
Полюсний поділ або відстань між полюсами магнітного
поля по довжині кола циліндра діаметром D.
Лінійна швидкість, звідки
де n 1 – синхронна частота обертання багатополюсного магнітного поля з числом пар полюсів Р.
Котушки, зображені на рис. 16.6 створюють двополюсне магнітне поле, з числом полюсів 2Р = 2. Частота обертання поля дорівнює 3000 об/хв. Щоб отримати чотириполюсне магнітне поле, необхідно всередині циліндра діаметром D помістити шість котушок по дві на кожну фазу. Тоді, згідно з формулою (16.7), магнітне поле обертатиметься вдвічі повільніше, з n 1 = 1500 об/хв.
Щоб отримати магнітне поле, що обертається, необхідно виконати дві умови:
- Умова 1 - мати хоча б дві просторово зміщені котушки.
- Умова 2 - підключити до котушок струми, що не збігаються по фазі.
Конструкція
Асинхронний двигун має нерухому частину, що називається статором, і частину, що обертається, звану ротором. У статорі розміщена обмотка, що створює магнітне поле, що обертається. Розрізняють асинхронні двигуни з короткозамкненим та фазним ротором. У пазах ротора з короткозамкнутою обмоткоюрозміщені алюмінієві чи мідні стрижні. По торцях стрижні замкнуті алюмінієвими або мідними кільцями. Статор і ротор набирають із листів електротехнічної сталі, щоб зменшити втрати на вихрові струми. Фазний ротор має трифазну обмотку (для трифазного двигуна). Кінці фаз з'єднані в загальний вузол, а почала виведені до трьох контактних кільців, розміщених на валу. На кільця накладають нерухомі контактні щітки. До щіток підключають пусковий реостат. Після пуску двигуна опір пускового реостату плавно зменшують до нуля.
Принцип дії асинхронного двигуна
Принцип дії асинхронного двигуна розглянемо моделі, зображеної на рис. 16.9.
Магнітне поле статора, що обертається, представимо у вигляді постійного магніту, що обертається з синхронною частотою обертання щ. У провідниках замкнутої обмотки ротора індукуються струми. Полюси магніту переміщаються за годинниковою стрілкою. Спостерігачеві, що розмістився на магніті, що обертається, здається, що магніт нерухомий, а провідники роторної обмоткипереміщуються проти годинникової стрілки. Напрями роторних струмів, визначені за правилом правої руки, вказані на рис. 16.9.

Рис. 16.9. Модель асинхронного двигуна
Користуючись правилом лівої руки, знайдемо напрямок електромагнітних сил, що діють на ротор і змушують його обертатися. Ротор двигуна обертатиметься з частотою обертання n 1 у напрямку обертання поля статора. Ротор обертається асинхронно, тобто частота його обертання n 2 менша за частоту обертання поля статора w. Відносна різниця швидкостей поля статора та ротора називається ковзанням:
Ковзання не може бути рівним нулю, так як при однакових швидкостях поля і ротора припинилося б наведення струмів у роторі і, отже, був би відсутній електромагнітний крутний момент.
Обертовий електромагнітний момент врівноважується протидіючим гальмівним моментом Зі збільшенням навантаження на валу двигуна гальмівний момент стає більше крутного, і ковзання збільшується. Внаслідок цього зростають індуктовані в роторній обмотці ЕРС та струми. Обертальний момент збільшується і стає рівним гальмівному моменту. Обертовий момент може зростати зі збільшенням ковзання до певного максимального значення, після чого при подальшому збільшенні гальмівного моменту крутний момент різко зменшується, і двигун зупиняється.
Якщо ковзання загальмованого двигуна дорівнює одиниці, то кажуть, що двигун працює у режимі короткого замикання. Частота обертання ненавантаженого асинхронного двигуна n 2 приблизно дорівнює синхронної частоти n 1 .
Якщо ковзання ненавантаженого двигуна S = 0, то говорять, що двигун працює у режимі холостого ходу.
Ковзання асинхронної машини, що працює в режимі двигуна, змінюється від нуля до одиниці. Асинхронна машина може працювати як генератора. Для цього її ротор необхідно обертати стороннім двигуном у напрямку обертання магнітного поля статора із частотою n 2 > n 1 . Ковзання асинхронного генератора S< 0.
Асинхронна машина може працювати як електромашинного гальма. Для цього необхідно її ротор обертати у напрямку, протилежному напрямку обертання магнітного поля статора. У цьому режимі S > 1.
Як правило, асинхронні машини використовуються як двигун. Асинхронний двигун є найпоширенішим у промисловості типом двигуна. Частота обертання поля в асинхронному двигуні жорстко пов'язана із частотою мережі f 1 та числом пар полюсів статора.
За частоти f 1 = 50 Гц існує наступний ряд частот обертання(Р - n 1, об/хв):
З формули (16.7) отримаємо
Швидкість поля статора щодо ротора називається швидкістю ковзання
![]()
Частота струму та ЕРС у роторній обмотці

Асинхронна машина із загальмованим ротором працює як трансформатор. Основний магнітний потік індукує в статорній та нерухомій роторній обмотках ЕРС Е 1 і Е 2K:

де Ф m - максимальне значення основного магнітного потоку, зчепленого зі статорною та роторною обмотками; W 1 і W 2 - числа витків статорної та роторної обмоток; - Частота напруги в мережі; До 01 і К 02 - обмотувальні коефіцієнти статорної та роторної обмоток.
Щоб отримати більш сприятливий розподіл магнітної індукції в повітряному зазорі між статором і ротором, обмотки статорні і роторні не зосереджують в межах одного полюса, а розподіляють по колам статора і ротора. ЕРС розподіленої обмотки менше ЕРС зосередженої обмотки. Цей факт враховується введенням у формули, що визначають величини електрорушійних сил обмоток, обмотувальних коефіцієнтів. Величини обмотувальних коефіцієнтів трохи менше одиниці. ЕРС в обмотці ротора, що обертається.
Струм ротора працюючої машини
де R 2 - активний опірроторної обмотки; х 2 - індуктивний опір роторної обмотки,
Де x 2K – індуктивний опір загальмованого ротора. Тоді
Однофазний двигун має одну обмотку, розташовану на статорі. Однофазна обмотка, що живиться змінним струмомстворить пульсуюче магнітне поле. Помістимо в це поле ротор із короткозамкнутою обмоткою. Ротор не обертатиметься. Якщо розкрутити ротор сторонньою механічною силою у будь-який бік, двигун стійко працюватиме. Пояснити це можна в такий спосіб.
Пульсуюче магнітне поле можна замінити двома магнітними полями, що обертаються в протилежних напрямках із синхронною частотою п1 і мають амплітуди магнітних потоків, рівні половині амплітуди магнітного потоку пульсуючого поля. Одне з магнітних полів називається прямообертальним, інше - обертовим. Кожне з магнітних полів індукує в роторній обмотці вихрові струми. При взаємодії вихрових струмів з магнітними полями утворюються моменти, що обертають, спрямовані зустрічно один одному. На рис. 16.10 зображені залежності моменту від прямого поля М", моменту від зворотного поля М" та результуючого моменту М функції ковзання М = М" - М".
Рис. 16.10. Залежність моменту прямого поля, зворотного поля та результуючого моменту від ковзання
Осі ковзань спрямовані зустрічно одна одній. У пусковому режимі на ротор діють моменти, що обертають, однакові за величиною і протилежні за напрямом. Розкрутимо ротор сторонньою силою в напрямку прямо обертового магнітного поля. З'явиться надлишковий (результуючий) крутний момент, що розганяє ротор до швидкості, близької до синхронної. При цьому ковзання двигуна щодо прямообертового магнітного поля
![]()
Ковзання двигуна щодо обертового магнітного поля
Розглядаючи результуючу характеристику, можна зробити такі висновки.
Висновок 1. Однофазний двигун не має пускового моменту. Він обертатиметься у той бік, у який розкручений зовнішньою силою.
Висновок 2.Через гальмівну дію обертового поля характеристики однофазного двигуна гірше, ніж трифазного.
Для створення пускового моменту однофазні двигунизабезпечують пусковою обмоткою, просторово зміщеною щодо основної, робочої обмоткина 90 °. Пускова обмотка підключається до мережі через фазозсувні елементи: конденсатор або активний опір.
На рис, 16.11 показана схема включення обмоток двигуна, де Р – робоча обмотка, П – пускова обмотка. Ємність фазосдвигающего елемента підбирають таким чином, щоб струми в робочій і пусковий обмотках розрізнялися по фазі на 90°. Трифазний асинхронний двигун може працювати від однофазної мережі, якщо підключити його обмотки за такими схемами (рис. 16.12).
У схемі, що зображена на рис. 16.12 а статорні обмотки з'єднані зіркою, а в схемі на рис. 16.12 б - трикутником. Розмір ємності З ~ 60 мкФ на 1 кВт потужності.
Рис. 16.11. Схема включення обмоток однофазного двигуна
Рис. 16.12. Схеми включення обмоток трифазного двигуна одну фазу: а - перший варіант; б - другий варіант