Motora mehāniskais raksturlielums sauc par rotora apgriezienu skaita atkarību no griezes momenta uz vārpstas n = f (M2). Tā kā pie slodzes tukšgaitas griezes moments ir mazs, tad M2 ≈ M un mehānisko raksturlielumu attēlo atkarība n = f (M). Ja ņem vērā sakarību s = (n1 - n) / n1, tad mehānisko raksturlielumu var iegūt, uzrādot tā grafisko atkarību koordinātēs n un M (1. att.).
Rīsi. 1. Asinhronā motora mehāniskais raksturlielums
Asinhronā motora dabiskais mehāniskais raksturlielums atbilst tās iekļaušanas galvenajai (pases) ķēdei un barošanas sprieguma nominālajiem parametriem. Mākslīgās īpašības tiek iegūti, ja ir iekļauti kādi papildu elementi: rezistori, reaktori, kondensatori. Kad dzinējs tiek darbināts nominālais spriegums raksturlielumi atšķiras arī no dabiskās mehāniskās īpašības.
Mehāniskie raksturlielumi ir ļoti ērts un noderīgs instruments elektriskās piedziņas statisko un dinamisko režīmu analīzei.
Galvenie mehānisko raksturlielumu punkti: kritiskā slīdēšana un frekvence, maksimālais griezes moments, palaišanas griezes moments, nominālais griezes moments.
Mehāniskais raksturlielums ir griezes momenta atkarība no slīdēšanas vai, citiem vārdiem sakot, no apgriezienu skaita:
![]()
No izteiksmes  var redzēt, ka šī atkarība ir ļoti sarežģīta, jo, kā parāda formulas)
var redzēt, ka šī atkarība ir ļoti sarežģīta, jo, kā parāda formulas)  un
un  , slip ir iekļauta arī izteicienos par es 2
un cos? 2. Asinhronā motora mehāniskās īpašības parasti tiek norādītas grafiski.
, slip ir iekļauta arī izteicienos par es 2
un cos? 2. Asinhronā motora mehāniskās īpašības parasti tiek norādītas grafiski.
Raksturlieluma sākuma punkts atbilst n= 0 un s= 1: Šis ir pirmais motora iedarbināšanas brīdis. Starta griezes moments M n - ļoti svarīga dzinēja darbības īpašību īpašība. Ja M n ir mazs, mazāks par nominālo darba griezes momentu, motoru var iedarbināt tikai tukšgaitā vai ar attiecīgi samazinātu mehānisko slodzi.
Apzīmē ar simbolu Mnp vārpstas mehāniskās slodzes radītais pretdarbības (bremzēšanas) moments, kurā iedarbojas dzinējs. Acīmredzams nosacījums spējai iedarbināt dzinēju ir: M n > Mnp . Ja šis nosacījums ir izpildīts, motora rotors sāks kustēties, apgriezienu skaits n palielināsies, un paslīdēšana s samazināt. Kā redzams no attēla, dzinēja griezes moments palielinās no M n līdz maksimumam M m kas atbilst kritiskajai slīdēšanai s kp, tāpēc pieaug arī pieejamā dzinēja jaudas pārpalikums, ko nosaka griezes momentu starpība M un Mnp .
Jo lielāka ir atšķirība starp pieejamo motora griezes momentu (iespējams noteiktai veiktspējas līknes novirzei) M un iebilst M np , jo vieglāks iedarbināšanas režīms un ātrāk dzinējs sasniedz vienmērīgu griešanās ātrumu.
Kā liecina mehāniskais raksturlielums, pie noteikta apgriezienu skaita (pie s = s kp) pieejamais motora griezes moments sasniedz maksimālo iespējamo šis dzinējs(pie noteikta sprieguma U ) vērtības M t . Tālāk dzinējs turpina palielināt griešanās ātrumu, bet pieejamais griezes moments strauji samazinās. Dažām vērtībām n un s dzinēja griezes moments kļūst vienāds ar pretdarbības momentu: dzinēja iedarbināšana beidzas, tā apgriezienu skaits tiek iestatīts uz vērtību, kas atbilst attiecībai:
![]()
Šī attiecība ir obligāta visiem dzinēja slodzes režīmiem, tas ir, visām vērtībām Mnp , nepārsniedzot dzinēja maksimālo pieejamo griezes momentu M t . Šajās robežās dzinējs pats automātiski pielāgojas visām slodzes svārstībām: ja dzinēja darbības laikā palielinās tā mehāniskā slodze, uz brīdi M np būs lielāks griezes moments, ko attīstīs dzinējs. Motora apgriezieni sāks samazināties un griezes moments palielināsies.
Rotācijas ātrums tiks iestatīts jaunā līmenī, kas atbilst vienādībai M un Mnp . Kad slodze samazinās, pārejas process uz jaunu slodzes režīmu tiks apgriezts.
Ja slodzes moments Mnp pārsniegs M t , dzinējs nekavējoties apstāsies, jo līdz ar turpmāku ātruma samazināšanos samazinās arī dzinēja griezes moments.
Tāpēc maksimālais motora griezes moments M t sauc arī par apgāšanos vai kritisko brīdi.
Ja momenta formulā ![]() aizstājējs:
aizstājējs:
tad mēs iegūstam:
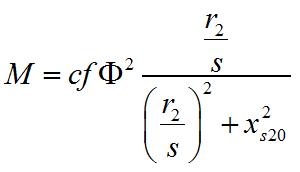
Ņemot pirmo atvasinājumu no M pielīdzinot to nullei, mēs atklājam, ka maksimālā griezes momenta vērtība rodas ar nosacījumu:
tas ir, ar tādu slīdēšanu s = s kp , pie kuras rotora aktīvā pretestība ir vienāda ar induktīvo pretestību
![]()
Vērtības s kp lielākā daļa asinhrono motoru ir diapazonā no 10 - 25%.
Ja iepriekš rakstītajā momentformulā, vietā aktīvā pretestība r 2 aizstājiet induktīvo saskaņā ar formulu
![]()
Asinhronā motora maksimālais griezes moments ir proporcionāls magnētiskās plūsmas kvadrātam (un līdz ar to sprieguma kvadrātam) un apgriezti proporcionāls rotora tinuma noplūdes induktivitātei.
Pie pastāvīga sprieguma, kas tiek piegādāts motoram, tā plūsma F paliek praktiski nemainīgs.
Arī rotora ķēdes noplūdes induktivitāte ir praktiski nemainīga. Tāpēc, mainoties aktīvajai pretestībai rotora ķēdē, griezes momenta maksimālā vērtība M t nemainīsies, bet notiks pie dažādām slīdēm (ar rotora aktīvās pretestības pieaugumu - pie lielām slīdēšanas vērtībām).
Acīmredzot maksimālo iespējamo motora slodzi nosaka tā vērtība M t . Motora raksturlielumu darba daļa atrodas šaurā apgriezienu diapazonā no n atbilstošs M t , pirms tam. Plkst n = n 1 (raksturīgs beigu punkts) M = 0, jo pie rotora sinhronā ātruma s = 0 un es 2 = 0.
Nominālais griezes moments, kas nosaka dzinēja jaudas vērtību, parasti tiek pieņemts vienāds ar 0,4–0,6 M t . Tādējādi asinhronie motori pieļauj īslaicīgas pārslodzes 2 - 2,5 reizes.
Galvenais parametrs, kas raksturo asinhronā motora darbības režīmu, ir slīde s - relatīvā atšķirība starp motora rotora griešanās frekvenci n un tā lauku n o: s = (n o - n) / n o .
Mehāniskā raksturlieluma laukums, kas atbilst 0 ≤ s ≤ 1, ir motora režīmu laukums, un pie s< s кр работа двигателя устойчива, при s >s cr - nestabils. Par s< 0 и s >1 motora griezes moments ir vērsts pret tā rotora griešanās virzienu (attiecīgi reģeneratīvā bremzēšana un reversās strāvas bremzēšana).
Motora mehānisko raksturlielumu stabilo posmu bieži apraksta ar Klosa formulu, aizstājot nominālā režīma parametrus, kuros var noteikt kritisko slīdi s cr:
 ,
,
kur: λ = M kp / M n - dzinēja pārslodzes jauda.
Mehānisko raksturlielumu saskaņā ar uzziņu grāmatas vai kataloga datiem var veidot aptuveni četros punktos (7.1. att.):
1. punkts - ideāli tukšgaita, n \u003d n o \u003d 60 f / p, M \u003d 0, kur: p ir stabu pāru skaits magnētiskais lauks dzinējs;
2. punkts - nominālais, režīms: n = n n, M = M n = 9550 P n / n n, kur P n - nominālā jauda dzinējs kW;
3. punkts - kritiskais režīms: n = n cr, M = M cr =λ M n;
4. punkts - sākuma režīms: n = 0, M = M sākums = β M n.
Analizējot dzinēja darbību slodzes diapazonā līdz M n un nedaudz vairāk, stabilu mehāniskā raksturlieluma posmu var aptuveni aprakstīt ar taisnes vienādojumu n = n 0 - vM, kur koeficients “v” ir viegli noteikt, vienādojumā aizstājot nominālā režīma parametrus n n un M n.
Statora tinumu dizains. Viena slāņa un divslāņu cilpas tinumi.
Atbilstoši spoļu konstrukcijai tinumus iedala vaļīgās spoles ar mīkstajām spolēm un tinumos ar cietajām spolēm vai pusspolēm. Mīkstās spoles ir izgatavotas no apaļas izolētas stieples. Lai iegūtu vajadzīgo formu, tie tiek iepriekš uztīti uz veidnēm un pēc tam ievietoti izolētās trapecveida rievās (sk. 3.4. att., iekšā, G un 3,5, iekšā); tinumu ieklāšanas laikā tiek uzstādītas fāzes-fāzu izolācijas blīves. Pēc tam spoles ar ķīļu vai pārsegu palīdzību nostiprina rievās, tām piešķir galīgo formu (tiek veidotas frontālās daļas), tinumu pārsien un piesūcina. Visu vaļīgo tinumu ražošanas procesu var pilnībā mehanizēt.
Cietās spoles (pusspoles) ir izgatavotas no taisnstūrveida izolētas stieples. Pirms ieklāšanas rievās tiem tiek piešķirta galīgā forma; tajā pašā laikā tiem tiek uzklāta korpusa un fāzes izolācija. Pēc tam spoles ievieto iepriekš izolētās atvērtās vai daļēji atvērtās rievās. , stiprināt un impregnēt.
1. Viena slāņa tinumi- vispiemērotākais mehanizētai klāšanai, jo šajā gadījumā tinumam jābūt koncentriskam un vienlaikus jāiekļaujas statora spraugās abās spoles pusēs. Tomēr to izmantošana palielina tinuma stieples patēriņu priekšējo daļu ievērojamā garuma dēļ. Turklāt šādos tinumos nav iespējams saīsināt piķi, kas noved pie magnētiskā lauka formas pasliktināšanās gaisa spraugā, papildu zudumu palielināšanās un krituma. mehāniskās īpašības un palielināts troksnis. Tomēr to vienkāršības un zemo izmaksu dēļ šādi tinumi tiek plaši izmantoti asinhronie motori maza jauda līdz 10-15 kW.
2. Divslāņu tinumi- dod iespēju saīsināt tinuma soli par jebkuru zobu dalījumu skaitu, kas uzlabo tinuma radītā magnētiskā lauka formu un nomāc augstākas harmonikas EML līknē. Turklāt ar divslāņu tinumiem tiek iegūta vienkāršāka gala savienojumu forma, kas vienkāršo tinumu izgatavošanu. Šādus tinumus izmanto motoriem ar jaudu virs 100 kW ar stingrām spolēm, kuras tiek uzliktas ar rokām.
Statora tinumi. Viena un divslāņu viļņu tinumi
Statora serdes rievās tiek ievietots daudzfāzu tinums, kas ir savienots ar tīklu maiņstrāva. Daudzfāzu simetriski tinumi ar fāžu skaitu t ietver t fāzes tinumi, kas savienoti zvaigznē vai daudzstūrī. Tā, piemēram, lietā trīsfāzu tinums statora fāžu skaits t = 3 un tinumus var savienot zvaigznē vai trīsstūrī. Fāzes tinumi savā starpā tiek pārvietoti 360 / t krusa; trīsfāzu tinumam šis leņķis ir 120°.
Fāzes tinumi ir izgatavoti no atsevišķām spolēm, kas savienotas virknē, paralēli vai virknē paralēli. Šajā gadījumā zem spole vairāki statora tinuma pagriezieni ir savienoti virknē, ievietoti tajās pašās rievās un tiem ir kopīga izolācija attiecībā pret rievas sienām. Savukārt spole tiek aplūkoti divi aktīvi (t.i., kas atrodas pašā statora serdenī) vadītāji, kas ielikti divās rievās zem blakus esošiem pretējiem poliem un savienoti viens ar otru virknē. Vadītājus, kas atrodas ārpus statora serdes un savieno viens ar otru aktīvos vadītājus, sauc par tinuma priekšējām daļām. Rievās ieliktās tinumu spoļu taisnās daļas sauc par spoļu malām vai rievu daļām.
Statora rievas, kurās iederas tinumi, veido tā sauktos zobus statora iekšpusē. Attālumu starp divu blakus esošo statora serdes zobu centriem, mērot gar tā virsmu, kas vērsta pret gaisa spraugu, sauc zobu dalīšana vai rievu dalījums.
Daudzslāņu cilindriskās spoles tinumi (3. attēls) ir uztīti no apaļas stieples un sastāv no daudzslāņu disku spolēm, kas atrodas gar stieni. Starp spolēm (caur katru spoli vai caur divām vai trim spolēm) var atstāt radiālos kanālus dzesēšanai. Šādi tinumi tiek izmantoti augstāka sprieguma pusē pie S st ≤ 335 kV × A, es st ≤ 45 A un U l.n ≤ 35 kV.
Viena slāņa un divslāņu cilindriskie tinumi (4. attēls) ir uztīti no viena vai vairākiem (līdz četriem) paralēliem taisnstūrveida vadītājiem un tiek izmantoti S st ≤ 200 kV × A, es st ≤ 800 A un U l.n ≤ 6 kV.
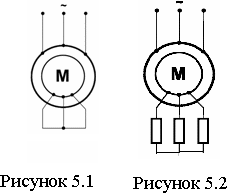
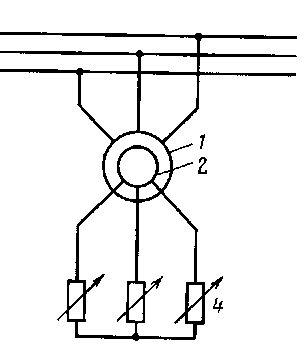
Elektriskajā piedziņā plaši tiek izmantots asinhronais vāveres motors (5.1. attēls) un IM ar fāzes rotoru (5.2. attēls), pateicoties lielajam darbspējas laikam, augstajai veiktspējai, labām vadības īpašībām.
5.3. attēlā parādīta elektromotora vienas fāzes ekvivalentā ķēde, ņemot vērā magnetizācijas ķēdes parametrus ar aktīvo r m un induktīvs x m pretestības.
Nomaiņas ķēdē:
r 1 - statora tinuma fāzes aktīvā pretestība;
r 2 ′ - uz statoru novadītā rotora tinuma fāzes aktīvā pretestība;
x 1 - statora tinuma fāzes induktīvā pretestība;
x 2 ′ - samazināts līdz rotora tinuma fāzes statora induktīvajai pretestībai;
x m- magnetizācijas ķēdes induktīvā pretestība.
Saskaņā ar līdzvērtīgu ķēdi, rotora strāva es 2 ' ir nozīme
No (5.1) izriet, ka rotora strāva es 2 ’ atkarīgs no slīdēšanas s, t.i. par mašīnas rotora ātrumu, kopš
Ņemiet vērā, ka palaišanas laikā slīdēšana s = 1(pašreizējā ātruma vērtība w = 0), un ar rotācijas frekvenci w=w 0 ideālā tukšgaitas slīde ir vienāda ar s = 0. No attiecības arī izriet, ka iedarbināšanas brīdī rotora strāva sasniedz maksimālo vērtību es 2k ’ @ (8¸10)I nom un būtu jāierobežo.
Rotora strāvas frekvence f lpp frekvences vērtībā f c tīkla spriegums f lpp = f c ×s, tāpēc, uzsākot s=1 un asinhrono mašīnu var attēlot ar sprieguma transformatoru, jo f lpp =f c =50 Hz. Tā kā dzinējs paātrina un darbojas ar nominālo slīdēšanu s n, kas nepārsniedz s n 0,1 ; samazinās arī rotora strāvas frekvence f lpp = 1...5Hz.
Jauda R 1 , ko AD patērē no tīkla, tiek tērēts, lai segtu magnetizācijas ķēdes zudumus ∆Р m un statora tinumā ∆Р 1 , pārējā daļa tiek pārveidota par elektromagnētisko jaudu R E , kas ir vienāds ar
![]()
Savukārt, , un, kopā risinot un atrast elektromagnētiskā momenta vērtību
 .
.
Atkarība (5.4.) ir IP mehānisko raksturlielumu apraksts un atspoguļo IP momenta sarežģītu atkarību no slīdēšanas. Mēs pārbaudām to, lai noteiktu ekstrēmu, ņemot atvasinājumu un pielīdzinot to nullei:
Atkarības maksimums pie kritiskās slīdes vērtības ir vienāds ar
un kritiskais (maksimālais) moments
Ņemiet vērā, ka zīme (+) attiecas uz motora režīmu, bet zīme (-) uz mašīnas ģeneratora režīmu.
Praktiskiem aprēķiniem ērtāk ir izmantot no izteiksmēm iegūto Klosa formulu
 , kur.
, kur.
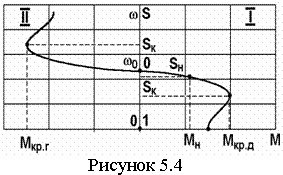
Lielajās asinhronajās mašīnās r 1 << r 2 ’ , un ε ≈0. IM mehāniskais raksturlielums ir 2.4. attēlā parādītajā formā. Raksturlieluma raksturīgie punkti:
1- s=0; M=0, kamēr motora ātrums ir vienāds ar sinhrono;
2- s=s nom , M=M nom- nomināls
dzinēja darbības režīms;
3- s = s uz , M = M kr.D- maksimālais griezes moments motora režīmā;
4- s = 1, M = M P- iniciālis Starta griezes moments;
5- s=-s uz , M = M kr.G- maksimālais griezes moments ģeneratora režīmā.
Analizējot barošanas sprieguma ietekme U uz elektromotora mehāniskajiem raksturlielumiem, pamatojoties uz sakarībām (5.6) un (5.7), mēs iegūstam, ka kritiskā slīde s uz paliek nemainīgs, samazinoties spriegumam, un kritiskais moments M kr.d samazinās proporcionāli barošanas sprieguma kvadrātam (5.5. attēls).
Kad tīkla spriegums nokrītas līdz vērtībai 0,9 × U nom, t.i. 10% atlaide U nom, kritisks brīdis M kr.d samazinās par 19%. Samazinoties barošanas spriegumam, lai attīstītu iepriekšējo griezes momenta vērtību, motoram jādarbojas ar lielām rotora strāvām. 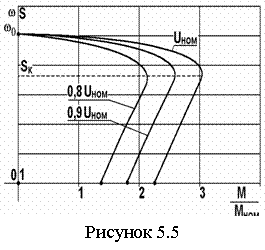
Projektējot elektromotoru, pārliecinieties, ka sākuma vērtība ( s = 1) un kritiskos brīžus ( s = s uz) ar zemāko iespējamo spriegumu atbilst darba mašīnas prasībām.
Analizējot aktīvās pretestības ietekme, kas ievadīts rotora ķēdē, pamatojoties uz attiecībām (5.5) - (5.6), kas ar rotora palielināšanos 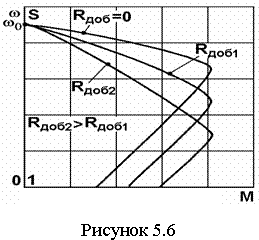
pretestība, kas kļūst vienāda ar ( r 2 ’ + R ext), kritiskā slīdēšana palielinās S uz, bet dzinēja kritiskā momenta vērtība M kr.d paliek nemainīgs.
Mehāniskie raksturlielumi parādīti 12. attēlā. Metode tiek izmantota, lai iedarbinātu mašīnu, kad iedarbināšanas laikā rotora ķēdē ir iekļauta nozīmīga vērtība. R ext . Palaišanas diagramma ir līdzīga neatkarīgi ierosināta līdzstrāvas motora diagrammai. Aprēķināt mākslīgos mehāniskos raksturlielumus, ieviešot pretestību R ext attiecība tiek izmantota rotācijas ķēdē
![]()
kur s un un s e- slīdēšana attiecīgi uz mākslīgām un dabīgām īpašībām.
Zinot apjomu R ext, kas ievadīts rotora ķēdē, tām pašām momenta vērtībām saskaņā ar sakarību (5.8) tiek aprēķinātas slīdes s un par mākslīgajām īpašībām.
Aktīvo induktīvo pretestību ieviešana mašīnas rotora ķēdē (14. attēls) tiek izmantota, lai uzturētu lielāku mašīnas palaišanas griezes momenta noturību, salīdzinot ar mašīnas dabisko raksturlielumu - mašīnas mehānisko raksturlielumu slīdēšanā. apgabalā 1
Mašīnas kritiskais moments M kr.d un kritiska buksēšana s uz
mašīnas mainās atkarībā no proporcijām. Aktīvās un induktīvās pretestības ievadīšana mašīnas statora ķēdē (attēls) tiek izmantota, lai samazinātu mašīnas ieslēgšanas strāvu, jo spriegums tieši statora spailēs kļūst par strāvas funkciju un, starta strāvai samazinoties (paātrinājums). ), norādītais spriegums pieaug un atjaunojas līdz vērtībai, kas ir tuvu U nom .
Aktīvās un induktīvās pretestības izvadi no mašīnas statora ķēdes veic relejs - kontaktors vai bezkontakta ķēde. 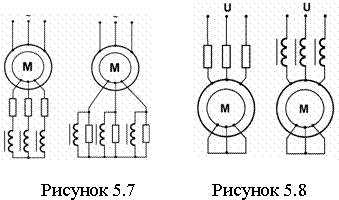
Asinhronie motori (IM) ir visizplatītākais motoru veids, jo tie ir vienkāršāki un uzticamāki darbībā, ar vienādu jaudu tiem ir mazāks svars, izmēri un izmaksas, salīdzinot ar DPT. Diagrammas asinsspiediena ieslēgšanai ir parādītas attēlā. 2.14.
Vēl nesen IM ar vāveres sprostu rotoru izmantoja neregulētās elektriskajās piedziņās. Tomēr, parādoties tiristoru frekvences pārveidotājiem (TFC), kas nodrošina spriegumu IM statora tinumiem, vadāmās elektriskajās piedziņās sāka izmantot vāveres motorus. Pašlaik frekvences pārveidotājos tiek izmantoti jaudas tranzistori un programmējamie kontrolleri. Ātruma regulēšanas metodi sauc par impulsu un tās uzlabošana ir svarīgākais virziens elektriskās piedziņas attīstībā.
Rīsi. 2.14. a) IM komutācijas ķēde ar vāveres būra rotoru;
b) IM komutācijas ķēde ar fāzes rotoru.
IM mehānisko raksturlielumu vienādojumu var iegūt, pamatojoties uz IP ekvivalento ķēdi. Ja mēs neņemam vērā statora aktīvo pretestību šajā ķēdē, tad mehāniskā raksturlieluma izteiksme izskatīsies šādi:
![]() ,
,
Šeit M līdz - kritiskais brīdis; S līdz- tai atbilstošā kritiskā nobīde; U f- tīkla fāzes sprieguma efektīvā vērtība; ω 0 =2πf/p ir IM rotējošā magnētiskā lauka leņķiskais ātrums (sinhronais ātrums); f– barošanas sprieguma frekvence; lpp- asinsspiediena stabu pāru skaits; x k- īssavienojuma induktīvā fāzes pretestība (nosaka no ekvivalentās ķēdes); S \u003d (ω 0 -ω) / ω 0- slīdēšana (rotora ātrums attiecībā pret rotējošā lauka ātrumu); R21 ir rotora fāzes kopējā aktīvā pretestība.
IM mehāniskais raksturlielums ar vāveres sprostu rotoru parādīts att. 2.15.
Rīsi. 2.15. IM ar vāveres būra rotoru mehāniskie raksturlielumi.
Uz tā var izdalīt trīs raksturīgus punktus. Pirmā punkta koordinātas ( S=0; ω=ω 0; M=0). Tas atbilst ideālajam tukšgaitas režīmam, kad rotora ātrums ir vienāds ar rotējošā magnētiskā lauka ātrumu. Otrā punkta koordinātas ( S=S līdz; M=M līdz). Dzinējs darbojas ar maksimālo griezes momentu. Plkst M c > M k motora rotors tiks piespiedu kārtā apturēts, kas ir motora īssavienojuma režīms. Tāpēc motora griezes momentu šajā brīdī sauc par kritisku. M līdz. Trešā punkta koordinātas ( S=1; ω=0; M=M lpp). Šajā brīdī dzinējs darbojas iedarbināšanas režīmā: rotora ātrums ω=0 un palaišanas griezes moments iedarbojas uz stacionāro rotoru M p. Mehāniskā raksturlieluma posmu, kas atrodas starp pirmo un otro raksturlielumu punktu, sauc par darba sekciju. Uz tā dzinējs darbojas vienmērīgā stāvoklī. IM ar vāveres būra rotoru atbilstoši nosacījumiem U=U n un f=f n mehāniskās īpašības sauc par dabīgām. Šajā gadījumā raksturlieluma darba sadaļā ir punkts, kas atbilst motora nominālajam darbības režīmam un kam ir koordinātas ( S n; ω n; M n).
Asinsspiediena elektromehāniskās īpašības ω=f(I f), kas 2.15. att. attēlots ar pārtrauktu līniju, atšķirībā no DPT elektromehāniskās īpašības, sakrīt ar mehānisko raksturlielumu tikai savā darba zonā. Tas ir saistīts ar faktu, ka palaišanas laikā emf mainīgās frekvences dēļ. rotora tinumā E 2 mainās strāvas frekvence un tinuma induktīvās un aktīvās pretestības attiecība: palaišanas sākumā strāvas frekvence ir liela un induktīvā pretestība ir lielāka par aktīvo; palielinot rotora ātrumu ω samazinās rotora strāvas frekvence un līdz ar to arī tā tinuma induktīvā pretestība. Tāpēc IM palaišanas strāva tiešā palaišanas režīmā ir 5÷7 reizes lielāka par nominālvērtību es fn, un palaišanas griezes momentu M p vienāds ar nominālo M n. Atšķirībā no DCT, kur palaišanas laikā ir jāierobežo palaišanas strāva un palaišanas griezes moments, iedarbinot IM, ir jāierobežo palaišanas strāva un jāpalielina palaišanas griezes moments. Pēdējais apstāklis ir vissvarīgākais, jo DPT ar neatkarīgu ierosmi sākas plkst Jaunkundze<2,5М н , DCT ar secīgu ierosmi pie Jaunkundze<5М н , un asinsspiedienu, strādājot pie dabas raksturlieluma pie Jaunkundze<М н .
IM ar vāveres būra rotoru palielinājums M p ko nodrošina īpašs rotora tinuma dizains. Rotora tinuma rieva ir izveidota dziļa, un pats tinums ir novietots divos slāņos. Iedarbinot dzinēju, frekvence E 2 un rotora strāvas ir lielas, kas noved pie strāvas nobīdes efekta parādīšanās - strāva plūst tikai tinuma augšējā slānī. Tāpēc palielinās tinuma pretestība un motora palaišanas griezes moments. M P. Tās vērtība var sasniegt 1,5 miljoni n.
IM ar fāzes rotoru palielinājums M P ko nodrošina, mainot tā mehāniskos parametrus. Ja pretestība R P, kas iekļauts rotora strāvas ķēdē, ir vienāds ar nulli - dzinējs darbojas ar dabisku raksturlielumu un M P \u003d M N. Plkst R P >0 palielinās rotora fāzes kopējā aktīvā pretestība R21. Kritiskā izslīdēšana S līdz kā jūs palielināt R21 arī palielinās. Rezultātā IM ar fāzes rotoru ievads R Pķēdē rotora strāvas plūsma noved pie nobīdes M K lielu slīdēšanas virzienā. Plkst S K \u003d 1 M P \u003d M K. IM ar fāzes rotoru mehāniskie raksturlielumi plkst R P >0 sauc par mākslīgo vai reostatu. Tie ir parādīti attēlā. 2.16.
Rīsi. 2.16. IM ar fāzes rotoru mehāniskie raksturlielumi.
Vāveres asinhronais motors iedarbināsies, kad M p > M s un darbosies punktā A (skat. 2.15. att.). Pēc šī pretošanās brīža Jaunkundze var palielināt līdz M K. HELL, kā arī līdzstrāvas motori, ar pieaugumu Jaunkundze automātiski, bez ārējas iejaukšanās, samazina ātrumu ω un palielināt griezes momentu M līdz M un Jaunkundze nav vienādi pēc izmēra, t.i. no līdzsvara stāvokļa ar lielāku ātrumu uz vienmērīgu stāvokli ar lēnāku ātrumu. Kad samazinās Jaunkundze tiks novērots pretējais - dzinējs automātiski pārslēgsies no līdzsvara stāvokļa pie mazāka ātruma uz līdzsvara stāvokli pie lielāka ātruma. IM mehāniskā raksturlieluma darba sekcija ir līdzīga DPT mehāniskajam raksturlielumam ar neatkarīgu ierosmi - taisnu līniju, kas ir slīpa pret abscisu asi.
AD ir šādas īpašības, pateicoties emf. E 2, ko inducē rotējošais statora magnētiskais lauks rotora tinumā. Plkst M c > M dinamisks brīdis M d<0 un rotora ātrumu ω samazinās. Statora magnētiskais lauks rotē nemainīgā ātrumā ω 0 (sinhronais ātrums) augstā frekvencē šķērsos rotora tinumu. Tāpēc tas palielināsies E 2, strāva rotora tinumā, ampērspēks, kas iedarbojas uz tā pagriezieniem, un līdz ar to arī griezes moments M.
IM pārslodzes kapacitāti pēc brīža nosaka kritiskā momenta attiecība M K līdz nominālajam laikam M N. Parastajam IM ar vāveres būra rotoru M K / M N \u003d 1,7, ar fāzes rotoru M K / M N \u003d 1,8. Īpašiem celtņu IM ar MTK tipa vāveres sprostu rotoru un MTKF tipa fāzes rotoru attiecība M K / M N \u003d 2,3 ÷ 3,4.
Magnētiskā lauka mijiedarbības rezultātā ar strāvām asinhronā motora rotorā rodas rotējošs elektromagnētiskais moments, kas tiecas izlīdzināt statora un rotora magnētiskā lauka rotācijas ātrumu.
Statora un rotora magnētiskā lauka griešanās ātruma atšķirība indukcijas motors raksturots slīdēšanas vērtība s = (n1 - n2 ) / n2, kur n1 - sinhronā lauka rotācijas ātrums, apgr./min, n2- asinhronā motora rotora griešanās ātrums, apgr./min. Strādājot ar nominālo slodzi, slīdēšana parasti ir neliela, tāpēc elektromotoram, piemēram, ar n1 = 1500 apgr./min., n2 = 1460 apgr./min, slīdēšana ir: s = ((1500 - 1460) / 1500) x 100 = 2,7%
Tas nevar sasniegt pat trīs atslēgtus mehānismus, jo ar to rotoru vadus nešķērsos magnētiskais lauks, tajos netiks inducēts EML un nebūs strāvas. Asinhronais moments pie s = 0 būs vienāds ar nulli.
Sākotnējā palaišanas brīdī rotora tinumos plūst strāva ar tīkla frekvenci. Rotoram paātrinoties, tiks noteikta tajā esošās strāvas frekvence bīdāmās indukcijas motors: f2 = s x f1, kur f1 ir statoram pievadītās strāvas frekvence.
Rotora pretestība ir atkarīga no tajā esošās strāvas frekvences, un jo augstāka ir frekvence, jo lielāka ir tā induktīvā pretestība. Palielinoties rotora induktīvajai pretestībai, palielinās fāzes nobīde starp spriegumu un strāvu statora tinumos.
Iedarbinot asinhronos motorus, jaudas koeficients ir ievērojami zemāks nekā parastas darbības laikā. Tiek noteikta pašreizējā vērtība ekvivalenta motora pretestības vērtība un pielietotais spriegums.
Asinhronā motora ekvivalentās pretestības vērtība ar slīdes izmaiņām mainās saskaņā ar sarežģītu likumu. Samazinoties slīdēšanai 1–0,15 robežās, pretestība, kā likums, palielinās ne vairāk kā 1,5 reizes diapazonā no 0,15 līdz sn om 5–7 reizes attiecībā pret sākotnējo vērtību palaišanas brīdī.
Strāvas lielums mainās apgriezti proporcionāli ekvivalentās pretestības izmaiņām.Tādējādi, iedarbinot līdz aptuveni 0,15 slīdēšanai, strāva nedaudz samazinās un pēc tam strauji samazinās.
Motora griezes moments nosaka magnētiskās plūsmas lielums, strāva un leņķiskā nobīde starp EMF un strāvu rotorā. Katrs no šiem lielumiem savukārt ir atkarīgs no slīdēšanas, tāpēc, lai pētītu asinhrono dzinēju veiktspēju, tiek noteikta griezes momenta atkarība no slīdēšanas un pievadītā sprieguma un frekvences ietekme uz to.
Griezes momentu var noteikt arī no elektromagnētiskās jaudas uz vārpstas kā šīs jaudas attiecību pret rotora leņķisko ātrumu. Griezes momenta lielums ir proporcionāls sprieguma kvadrātam un apgriezti proporcionāls frekvences kvadrātam.
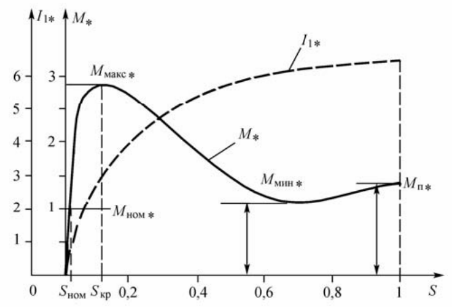
Momenta raksturīgās vērtības atkarībā no slīdēšanas (vai ātruma) ir sākotnējā griezes momenta vērtība(kad motors joprojām stāv), maksimālā griezes momenta vērtība(un atbilstošā slīdēšana, ko sauc par kritisko) un minimālā momenta vērtība ātruma ierobežojumā no stacionāra stāvokļa uz nominālo.
Griezes momenta vērtības nominālajam spriegumam ir norādītas elektrisko mašīnu katalogos. Zināšanas par minimālo griezes momentu ir nepieciešamas, aprēķinot mehānisma iedarbināšanas vai pašpalaišanas pieļaujamību ar pilnu mehānisma slodzi. Tāpēc tā vērtība konkrētiem aprēķiniem ir jānosaka vai jāiegūst no piegādātājas iekārtas.
Maksimālās griezes momenta vērtības lielumu nosaka statora un rotora induktīvā noplūdes pretestība, un tas nav atkarīgs no rotora pretestības lieluma.
Kritiskā izslīdēšana nosaka rotora pretestības attiecība pret ekvivalento pretestību (sakarā ar statora aktīvo pretestību un statora un rotora induktīvās noplūdes pretestību).
Tikai rotora aktīvās pretestības palielināšanās ir saistīta ar kritiskās slīdēšanas palielināšanos un maksimālā griezes momenta nobīdi uz lielāku slīdēšanas apgabalu (mazāks griešanās ātrums). Tādā veidā var panākt momentu īpašību izmaiņas.
Slīdēšanas izmaiņas ir iespējamas, palielinot rotora vai plūsmas pretestību. Pirmā iespēja ir iespējama tikai asinhronajiem motoriem ar fāzes rotoru (no S = 1 līdz S = Snom), taču tā nav ekonomiska. Otrā iespēja ir iespējama, mainoties barošanas spriegumam, bet tikai samazināšanās virzienā. Vadības diapazons ir mazs, jo S palielinās, bet tajā pašā laikā samazinās asinhronā motora pārslodzes jauda. Efektivitātes ziņā abas iespējas ir aptuveni līdzvērtīgas.
Griezes momenta izmaiņas pie dažādām slīdēm tiek veiktas ar pretestības palīdzību, kas ievadīta rotora tinuma ķēdē. AT asinhronie motori ar vāveres būra rotoru griezes momenta izmaiņas var panākt, izmantojot motorus ar mainīgiem parametriem vai izmantojot.
Pareiza elektromotora izvēle ražošanas mehānismam ir tā normālas un ekonomiskas darbības atslēga. Ja elektromotors ir izvēlēts pareizi, tas vienkāršos elektriskās piedziņas vadības sistēmu un, iespējams, samazinās elektriskās piedziņas izmaksas. Kā zināms, elektriskajai piedziņai jānodrošina ne tikai līdzsvara stāvokļa vērtību (ātruma, griezes momenta), bet arī dinamisko (pārejoši procesi, piemēram, paātrinājums, bremzēšanas moments, palaišanas moments utt.) noturība.
Galvenais elektromotoru izvēles kritērijs ir atkarība, kas parāda elektromotora momenta M vērtību un vārpstas griešanās ātrumu n šī momenta iedarbībā. Šo atkarību sauc par mehānisko raksturlielumu n=f(M). Atbilstoši mehāniskajiem raksturlielumiem tiek veikta dzinēja elektromehānisko īpašību analīze, kā arī izvērtēta tā izmantošanas lietderība dažāda veida mehānismiem un ierīcēm. Tie var būt divu veidu: dabiski un mākslīgi.
Dabiski mehāniskie raksturlielumi: tie tiek noņemti, ja nominālie parametri ietekmē motoru (nominālā strāva, tinuma pretestība, spriegums, pretestības moments utt.). Tas ir, motors ir pievienots strāvas avotam bez pārveidotāja ierīcēm - tieša savienojuma.
Mākslīgie mehāniskie raksturlielumi: tie tiek noņemti, kad motora ķēdē tiek ievadīti papildu elementi (papildu rezistors) vai ar samazinātu barošanas spriegumu, frekvenci (ja motoram ir maiņspriegums) utt. Tas ir, dzinēja mehāniskās īpašības tiek mākslīgi ietekmētas.
Mehāniskās īpašības izceļas arī, mainot vārpstas griešanās ātrumu atkarībā no griezes momenta pieauguma. Tie ir novērtēti pēc cietības.
un slīpuma stāvums:
Lai noteiktu mehāniskā raksturlieluma stingrību, ir jāzina apgriezienu skaita un griezes momenta izmaiņas noteiktā atkarības n=f(M) posmā. Attiecīgi visi stinguma aprēķini tiek veikti procentos vai relatīvās vienībās.
Arī mehāniskos raksturlielumus var iedalīt grupās:
- Stingrs - kad ātrums nedaudz samazinās, palielinoties slodzes griezes momentam. Piemēram, neatkarīgas ierosmes līdzstrāvas motori DCT NV vai asinhronā motora raksturlieluma lineārā daļa.
- Mīksts - palielinoties slodzes griezes momentam, griešanās ātruma izmaiņas ir diezgan nozīmīgas. Tajos ietilpst DPT PV sērijas ierosmes līdzstrāvas motori.
Zemāk ir dažādu elektromotoru mehānisko raksturlielumu grafiks:
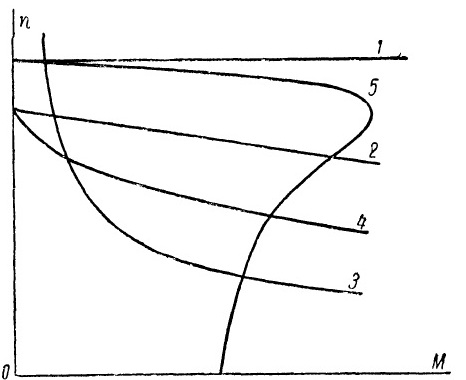
- ir absolūti stingra sinhronā mašīna
- – stingrs DPT NV
- - mīksts DPT PV
- – jauktas ierosmes mīksts DPT
- - asinhronais motors
Elektromotora izvēli nosaka ražošanas mehānismu prasības. Tādās nozarēs kā metāla velmēšana, papīra vai kartona ražošana ir nepieciešama precīza nemainīga ātruma uzturēšana, un tādiem mehānismiem kā pacelšana un transportēšana neprasa stingrus raksturlielumus (DPT PV izmanto vilces elektriskajās piedziņās, un to izmanto arī daži celtņa mehānismi).