Automašīnā līdzstrāva armatūras tinumam ir zema pretestība un, pieslēdzoties tīklam, rodas palaišanas strāvas, kas var sasniegt 15 ... 20I nom. Armatūras strāvu palielināšanās virs vērtības 2...2,5I nom noved pie pārslēgšanas pasliktināšanās.
Turklāt radušies dinamiskie spēki var pakāpeniski iznīcināt armatūras tinumu, izraisīt atslēgu bīdīšanu, vārpstu sagriešanos utt. Starta strāvu ierobežošana tiek veikta ar pretestību r 1, r 2, r 3 palīdzību, kas iekļautas enkura ķēdē (2.12. att.). Motoram paātrinoties, EMF palielinās un strāva samazinās. Secīgi saīsinot pretestības ar kontaktiem KM1, KM2, KMZ, tās veic (veic) iedarbināšanu. Dzinēja palaišanas shēma ir parādīta attēlā. 2.13.
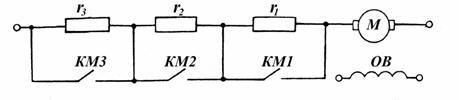
Rīsi. 2.13. Shēma palaišanas rezistoru ieslēgšanai ..
Pārslēgšanas strāvu I 1 un I 2 vērtības tiek izvēlētas, pamatojoties uz elektriskās piedziņas tehnoloģijas prasībām un motora pārslēgšanas jaudu. Tātad tie ņem I 1 \u003d (2,0 ... 2,5) I H un I 2 \u003d (1,2 ... 1,3) I H gadījumos, kad dzinēja iedarbināšanas ilgums ietekmē bieži ieslēgtas mašīnas veiktspēju.
Ja Tu gribi vienmērīgs sākums piemēram, pasažieru lifti, tad pārslēgšanas strāvu vērtības noteiks pieļaujamie elektriskās piedziņas paātrinājumi. Gadījumos, kad iedarbināšana ir reta un starta apstākļi nav ierobežoti, strāvu I 1 un I 2 vērtības var ņemt nedaudz lielākas par darba strāvām (bet daudz mazākas nekā pirmajā gadījumā, kad I 1 = (2 ... 2,5) I N.
Vērtības starta pretestības aprēķināts ar analītiskām un grafiskām metodēm. Ja ir iestatīts soļu skaits, tas nozīmē, ka aprēķins tiek veikts jau zināmam standarta kontaktora panelim. Ja soļu skaits nav zināms, tas ir jāizvēlas
Analītiskā metode palaišanas pretestības aprēķināšanai
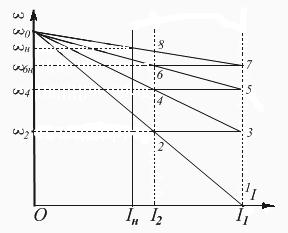
Kad dzinējs ir pievienots tīklam, paātrinājums sākas ar starta pretestību R 3 \u003d r I + r 1 + r 2 + r 3 (2.13. att.). Šīs pretestības atbilst mākslīgai elektrībai mehāniskās īpašības
1 - 2 - ω 0 (2.14. att.). Pie strāvas I 2 un ātruma ω 2 (2. punkts) papildu pretestība r 3 tiek manevrēta ar KMZ kontaktiem, un motora strāva atkal palielinās līdz I 1 (3. punkts). Sākums turpinās ar pretestību R 3 \u003d r I + r 1 + r 2 saskaņā ar raksturlielumu Z - 4 - ω o. Šī raksturlieluma 4. punktā r 2 tiek izslēgts ar kontaktu KM2. Ar pretestību
R 3 \u003d r I + r 1 dzinējs paātrina atbilstoši raksturlielumam 5 - 6 - ω o. Pie ātruma ω 6 (6. punkts) pēdējā pretestība r 1 tiek izslēgta, un motors ieiet dabiskajā elektromehāniskajā raksturlīknē 7 - 8 - ω o, pa kuru tas paātrina ātrumu, kas atbilst vārpstas slodzei.
Lai noteiktu papildu pretestības vērtības, mēs ņemam strāvu attiecību, kas atbilst punktiem 3 un 2 pie sākuma diagrammas leņķiskā ātruma ω 2:
![]() . (2.31)
. (2.31)
Rīsi. 2.14. Sākuma shēma DPT NV.
Motora EMF vērtības šajos punktos ir vienādas, jo griešanās ātrums ω 2 NEMAINA
Pēc sprieguma samazināšanas mēs iegūstam:
![]() .
.
Pie leņķiskā ātruma ω 4 punktiem 4-5 mēs rakstām:
![]() ;
;
šeit E 4 \u003d E 5 un strāvas I 5 \u003d I 1, I 4 \u003d I 2, tāpēc:
![]() .
.
Līdzīgi leņķiskajam ātrumam ω 6 (6. un 7. punkts):
![]()
vai ![]() .
.
Apzīmēsim pārslēgšanas strāvu attiecību: , tad
Ja būtu m soļi, tad pēc analoģijas:
Šajā izteiksmē sākuma posmu skaits m un starta strāvu daudzveidība ir savstarpēji saistīti:
![]() (2.34) vai . (2,35)
(2.34) vai . (2,35)
Katra posma pretestības vērtību var noteikt šādi:
Palaišanas pretestības aprēķināšanas procedūra
Ja ir norādīts soļu skaits m, tad pretestības aprēķinu veic šādi:
1) iestatiet pašreizējo vērtību I 1 un nosakiet R m:
2) atrodiet pārslēgšanas strāvu attiecību:
![]() , (2.37)
, (2.37)
kur; P n, U n, I n, η n - dzinēja pases dati;
3) aprēķina otrās pārslēgšanas strāvas vērtību I 2:
un salīdziniet to ar motora darba strāvu I s, kas atbilst darba mašīnas maksimālajam griezes momentam palaišanas brīdī.
Ja ir zināms darba moments M s, tad
![]() ,
,
un ja jauda uz darba mašīnas vārpstas ir dota P V.r.m. , tad
![]() .
.
I 2 > (1.1...1.2) I c nosaka katra posma pretestību:
...![]() . (2.38)
. (2.38)
Ja nosacījums I 2 > 1,1I c nav izpildīts, tad izvēlamies jaunu
(lielāku) vērtību I 1 un atkārtojiet aprēķinu.
Ja pretestības pakāpienu skaits nav zināms, tad aprēķinu veic šādā secībā:
1) mēs iestatām pārslēgšanas strāvu I 1, I 2 vērtības un nosaka λ:
2) noteikt soļu skaitu:
kur; ![]() .
.
Iegūtā m vērtība (ja tā ir daļēja) tiek noapaļota līdz
tuvākais veselais skaitlis un norādiet λ un strāvu I 2:
![]() ; .
; .
Papildu aprēķins tiek veikts tāpat kā pirmajā gadījumā. Pēc pirmās vai otrās iespējas aprēķinu pabeigšanas ir jāpārbauda aprēķinu pareizība. Lai to izdarītu, mēs nosakām kopējo summu
pretestība:
un salīdziniet ar oriģinālu. Novirzei aprēķinos jābūt pieļaujamās kļūdas robežās - 5 ... 7%.
Grafiskā metode palaišanas pretestību aprēķināšanai
Šī aprēķina metode sniedz vizuālu papildu pretestības vērtību attēlojumu, taču tā ir ievērojams trūkums -
aprēķinu precizitāte ir atkarīga no dzinēja palaišanas shēmas veidošanas precizitātes.
Elektromehāniskās īpašības līdzstrāvas motoram ar papildu pretestību R ext., kas iekļauts armatūras ķēdē. attēlā parādīts. 2.15.
2.15.att. DPT NV elektromehāniskās īpašības ar papildu rezistoru ieviešanu armatūras ķēdē.
EML vienādojums nominālajai strāvai un ātrumam ω
(punkts at):
Mēs sadalām pēdējo izteiksmi sf n:
![]() . (2.39)
. (2.39)
No 2.15. att. mums ir:
 (2.40)
(2.40)
Salīdzinot izteiksmes (2.39) un (2.40), mēs rakstām:
tāpēc I n un sf n nemainīgām vērtībām segmenta ab vērtība ir proporcionāla . Ja raksturlielums iet caur punktu r , tad viss pielietotais U n tiek līdzsvarots ar iekrišanu
pretestība Rn:
R n nes vārdu nominālā pretestība,![]() . Nominālā motora pretestība - e tad šī ir armatūras ķēdes pretestība, pie kuras ieslēgšanas brīdī (pie ω = 0) enkura tinumā plūst nominālā strāva. Segments ag ir proporcionāls R n. Tādējādi atbilstoši segmenta vērtībai, kas nogriezta ar raksturlielumu nominālās strāvas līnijā, ir iespējams aprēķināt armatūras ķēdes pretestību. Bet šim jums jāzina mērogs
. Nominālā motora pretestība - e tad šī ir armatūras ķēdes pretestība, pie kuras ieslēgšanas brīdī (pie ω = 0) enkura tinumā plūst nominālā strāva. Segments ag ir proporcionāls R n. Tādējādi atbilstoši segmenta vērtībai, kas nogriezta ar raksturlielumu nominālās strāvas līnijā, ir iespējams aprēķināt armatūras ķēdes pretestību. Bet šim jums jāzina mērogs
pretestība:
kur; U n, I n, R n, - nominālais spriegums, motora strāva un jauda.
Pirmais skalas noteikšanas veids ir precīzāks, jo
segments ag ir lielāks par segmentu ab.
Aprēķinot līdzstrāvas motora palaišanas pretestību ar grafisku metodi, ir iespējamas divas iespējas.
1. Ir iestatīts starta posmu skaits m.
Saskaņā ar mašīnas pases datiem mēs veidojam dabisku elektromehānisko raksturlielumu, izmantojot divus punktus (ω o, M = 0) un (I n, ω n)
(2.16. att.). Novietojiet pārslēgšanas strāvu I 1 un I 2 vērtības.
To vērtībām jābūt pamatotām, pamatojoties uz tehnoloģiju prasībām attiecībā uz elektrisko piedziņu un motora pārslēgšanas jaudu. Strāvas I 1 ierobežojošā vērtība tiek pieņemta vienāda ar (2 ... 2,5) I n. Pašreizējais I 2 \u003d (1,2 ... 1,3) I n. Caur punktiem, kas atbilst I 1 un I 2 vērtībām uz strāvu ass, mēs novelkam divas taisnas līnijas, kas ir paralēlas rotācijas frekvences asij. Punktus 1 un ω o savienojam ar taisni, kas 2. punktā krustojas ar strāvu I 2 .
Tālākā būvniecības kārtība no 2. līdz 3.punktam utt. redzams no att. 2.16. Konstrukcijas rezultātā nepieciešams nokļūt dabiskā elektromehāniskā raksturlīknes un pārslēgšanas strāvas līnijas I 1 krustpunktā (7. punkts). Ja sakritība neizdevās vai pēdu skaits nav vienāds ar norādīto, tad jāmaina strāvas I 2 vai I 1 vērtība un jāatkārto konstrukcija.

Rīsi. 2.16. Grafiskā metode palaišanas pretestību aprēķināšanai
Tādējādi dzinēja iedarbināšanas process vairākos posmos, kas parādīts attēlā. 2.16 raksturo fakts, ka motora strāva palaišanas laikā svārstās no . Iedarbināšanas sākumā, dzinējam paātrinoties, palielinās tā EMF, kā rezultātā dzinēja armatūras ķēdē sāk samazināties strāva un līdz ar to arī dzinēja griezes moments. Kad strāva sasniedz, daļa palaišanas reostata tiek izslēgta, lai motora strāva atkal sasniegtu vērtību utt.
Noņemot palaišanas rezistorus, armatūras ķēdes pretestība samazinās, un līdz ar to samazinās arī elektromehāniskās konstantes vērtība, kas noved pie starta ilguma samazināšanās katrā nākamajā posmā.
Līdzstrāvas motoriem var būt neatkarīga, paralēla, virknes vai jaukta ierosme (6.1. att.).
Rīsi. 6.1. Neatkarīgas līdzstrāvas motora ķēdes ( a),
paralēli ( b), secīgi ( iekšā) un sajaukts ( G) uzbudinājums
(shēmas "c" augšējā daļa pieder shēmai "a")
Paralēlā ierosmes motorā lauka tinums ir savienots paralēli armatūras spailēm. Bet strāva, kas plūst caur šo tinumu, atšķirībā no armatūras strāvas, nav atkarīga no slodzes, un to nosaka armatūrai pievadītais spriegums un ierosmes ķēdes kopējā pretestība. Šī iemesla dēļ šunta ierosmes motoru sauc arī par neatkarīgas ierosmes motoru.
Griezes moments M Līdzstrāvas motors un tā EMF E tiek noteiktas pēc formulām
M= uz F es es; E= kФω,
kur k ir dzinēja projektētais koeficients;
Ф – magnētiskā plūsma, Wb;
es i - armatūras strāva, A.
ω ir leņķiskais ātrums, rad/s.
Elektromehāniskie vienādojumi ω = ƒ ( es i) un mehāniskā ω = ƒ ( M) raksturlielumiem ir forma
ω = U/(kF) – ( R es + R p) / (k F) es es;
ω = U/(kF) – ( R es + R p) / (līdz 2 F2) M.
Ideālās tukšgaitas leņķiskais ātrums (pie es i = 0 vai M = 0)
ω 0 = U/(kF).
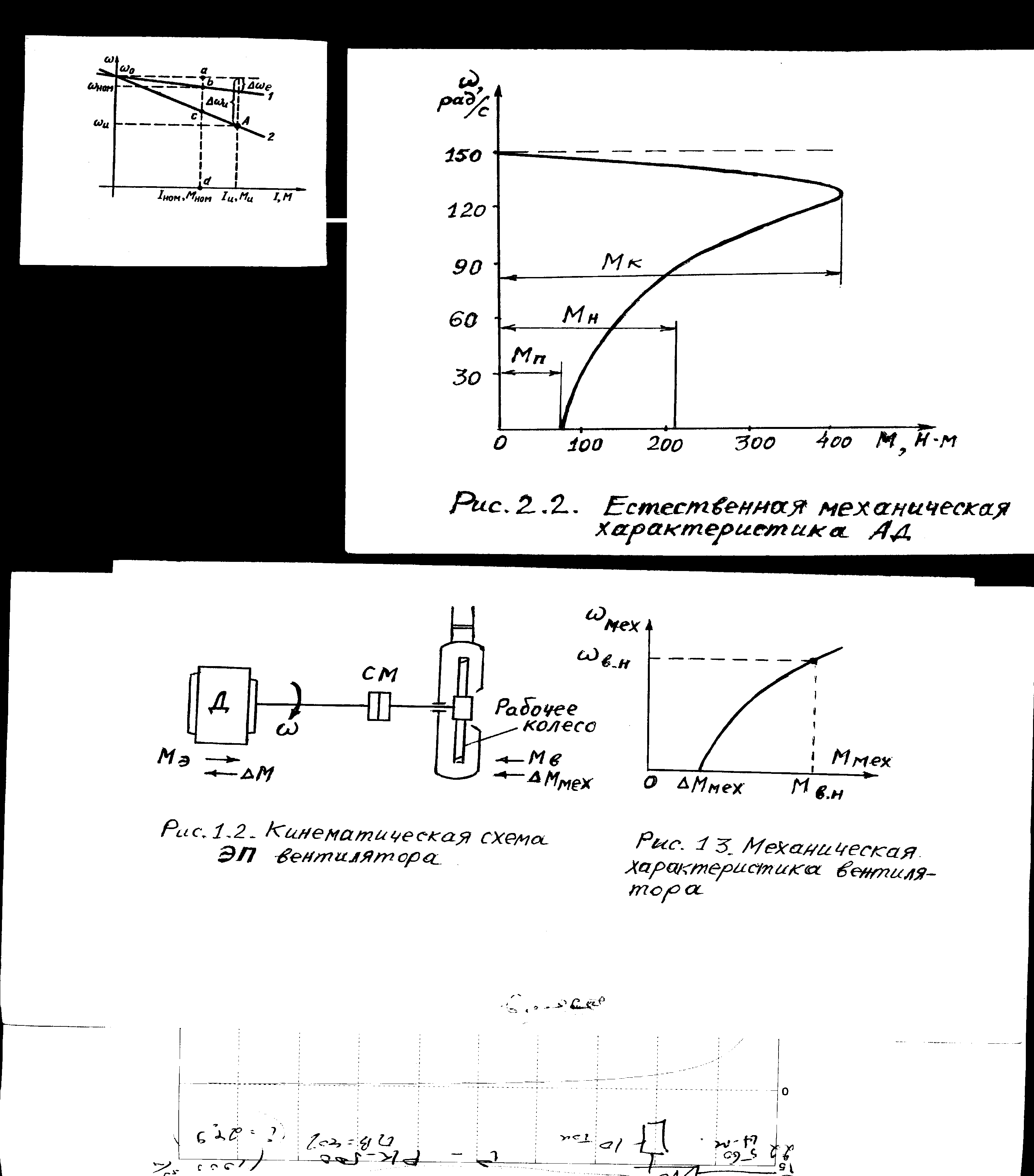
Uz att. 6.2 parāda līdzstrāvas motora ar neatkarīgu ierosmi (DPT NV) mehāniskās īpašības visos darbības režīmos. Motora režīma raksturlielumu raksturīgie punkti ir: ideālās tukšgaitas punkts (ω 0, M= 0); nominālā režīma punkts (ω n, M n); punkts īssavienojums (ω = 0, M = M uz).
Mehāniskā raksturlieluma stingrību nosaka ierosmes plūsma un enkura ķēdes pretestība:
β = d M/dω = - līdz 2 Ф 2 / ( R es + R p) = - M uz / ω.
Rīsi. 6.2. Līdzstrāvas motora ar neatkarīgu ierosmi kombinētie mehāniskie raksturlielumi
Augstākā stinguma moduļa vērtība atbilst dabiskajam mehāniskajam raksturlielumam, jo ierosmes strāva ir vienāda ar nominālo strāvu un vadības pretestību R p \u003d 0. Palielinoties reostata pretestībai R p palielinās mehāniskā raksturlieluma slīpums un samazinās leņķiskais ātrums. Par noteiktu pretestības vērtību R p un nominālais griezes moments M n dzinēja leņķiskais ātrums
ω n.r = ω 0 (1 – es n ( R es + R R) / U n.
Lai aprēķinātu mehāniskos raksturlielumus, ir jāzina motora armatūras pretestība R i, kas ir norādīts katalogos. Ja nav rūpnīcas datu, vērtība R Es atrodu aptuveni pēc formulas
R i \u003d 0,5 (1 - ŋ n) ( U n/ es n).
Tā kā DPT NV mehāniskie raksturlielumi ir nepārprotami, to attēlošanai pietiek ar diviem punktiem:
1) ω = ω 0 un M = 0,
2) ω = ω n (vai ω = ω n.r) un M = M n.
DPT NV ir iespējami šādi trīs elektriskās bremzēšanas režīmi.
1. Reģeneratīvā bremzēšana, kas rodas, ja dzinēja apgriezieni pārsniedz ideālos tukšgaitas apgriezienus. Tas ir visekonomiskākais, jo bremzēšanas enerģija tiek nodota elektrotīklam. Mehāniskie raksturlielumi šajā režīmā ir atbilstošo motora režīma raksturlielumu turpinājums II kvadrantā. Reģeneratīvās bremzēšanas laikā motora ķēde nemainās.
2. Dinamiskā bremzēšana. Motora armatūra ir atvienota no tīkla un īssavienojums ar pretestību. Šajā gadījumā kustīgo daļu (mehānisma un motora armatūras) mehāniskā enerģija tiek pārveidota par elektroenerģiju, kas tiek zaudēta siltumenerģijas veidā enkura ķēdes pretestībā. Mehāniskie raksturlielumi šajā bremzēšanas režīmā iet caur izcelsmi (6.2. attēlā - līnijas ar trim iecirtumiem).
3. Reversā bremzēšana veic divos veidos:
1) augstas pretestības ieviešana armatūras ķēdē.Šajā gadījumā motora griezes moments kļūst mazāks par statiskās slodzes griezes momentu. M Ar. Dzinējs apstājas (punktā A) un pēc tam griezes momenta ietekmē M c sāk griezties otrā virzienā, attīstot bremzēšanas momentu; punktā B iestājas līdzsvara stāvoklis. Mehāniskie raksturlielumi ir motora režīma atbilstošo raksturlielumu turpinājums (6.2. att. - līnijas ar četriem serifiem);
2) bremzēšana, pa ceļam pārslēdzot armatūras tinuma polaritāti. Motors darbojas punktā 1 , pēc pārslēgšanas tas pārslēgsies uz reostatisko raksturlielumu punktā 2. Gar līniju 2–3 notiek palēninājums (līnija ar pieciem serifiem). Punktā 3 motors apstājas un ir jāatvieno no elektrotīkla, lai izvairītos no pārslēgšanās uz motora režīmu ar apgrieztu griešanos.
AT Līdzstrāvas motors ar virknes ierosmide-niem armatūras strāva ir arī ierosmes strāva. Palielinoties slodzei, palielinās ierosmes magnētiskā plūsma, kā rezultātā leņķiskais ātrums samazinās atbilstoši vienādojumam (6.1) un motora mehāniskais raksturlielums būs mīksts (6.3. att.). Pateicoties tam, NV DPT salīdzinoši viegli un vienmērīgi pārvar pārslodzes, un tam ir augsts palaišanas griezes moments. Šīs dzinēja īpašības ļauj to plaši izmantot transporta mehānismu piedziņā. Dzinēja mehāniskās īpašības ievērojami mīkstina, ja armatūras ķēdē tiek ievadīts reostats (6.3. att., līnijas ar vienu iecirtumu).
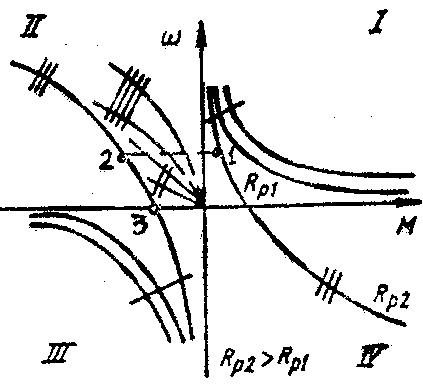
Rīsi. 6.3. Līdzstrāvas motora mehāniskie parametri
ar secīgu ierosmi
DPT PV nav iespējams ieviest reģeneratīvās bremzēšanas režīmu, jo tajā nav ideāla tukšgaitas ātruma.
Dinamiskā bremzēšana var veikt saskaņā ar shēmu ar pašiedrošanos un ar neatkarīgu ierosmi. Pirmajā gadījumā armatūra un ierosmes tinums tiek atvienoti no tīkla un slēgti reostatam. Uz izvairieties no iekārtas atgaisošanas, nepieciešams pārslēgt ierosmes tinumu (vai enkuru), lai nemainās strāvas virziens ierosmes tinumā. Šajā gadījumā mašīna tiek pašierināta pie noteiktas armatūras ķēdes pretestības tikai pie noteiktas leņķiskā ātruma vērtības; satraukti, tas rada bremzēšanas momentu. Mehāniskie raksturlielumi ir nelineāri (6.3. attēlā - līknes ar četriem iecirtumiem).
Dzinēja mehāniskie raksturlielumi dinamiskās bremzēšanas režīmā ar neatkarīgu ierosmi ir līdzīgi dzinēja ar neatkarīgu ierosmi atbilstošajiem raksturlielumiem (6.3. att. - līnijas ar diviem iegriezumiem). Šī bremzēšanas metode atrasta plašs pielietojums, un pirmo metodi izmanto reti, galvenokārt avārijas gadījumā, piemēram, ja tīkla spriegums neizdodas.
Bremzēšana ar opozīciju, tāpat kā DPT NV, tiek veikta divos veidos:
1) iekļaušana augstas pretestības armatūras ķēdē;
2) mainot armatūras tinuma polaritāti, atstājot nemainīgu strāvas virzienu ierosmes tinumā.
Ar pirmo metodi mehāniskais raksturlielums būs motora režīmam atbilstošā raksturlieluma turpinājums (6.3. attēlā - līnija ar trim iecirtumiem). Otrajā metodē bremzēšanu veic pa līniju 1 –2–3 .
Līdzstrāvas elektrisko piedziņu ātruma kontrole. DPT NV ātrumu var regulēt:
1) mainot pretestību armatūras ķēdē;
2) ierosmes plūsmas izmaiņas;
3) mainot armatūrai pievadīto spriegumu.
regula saskaņā ar pirmo metodi ir būtiski trūkumi:
- mehānisko raksturlielumu stingrība samazinās, samazinoties leņķiskajam ātrumam, un palielinās jaudas zudumi galvenajā ķēdē;
- kontroles diapazons ir ierobežots, it īpaši pie zemām slodzēm;
– neliels regulēšanas gludums un precizitāte.
Šo iemeslu dēļ šāda veida regulēšana tiek reti izmantota līdzstrāvas piedziņā.
Autors otrais veids magnētisko plūsmu iespējams regulēt tikai samazināšanās virzienā (jo nominālajā režīmā motora magnētiskā ķēde ir piesātināta), kas atbilst ātruma palielinājumam virs nominālā. Iespējamais ātruma regulēšanas diapazons standarta motoram nepārsniedz 2. Augšējo ātruma ierobežojumu ierobežo dzinēja armatūras elementu mehāniskā izturība - armatūras tinumu pārsēji, kolektors.
Galvenais veids, kā kontrolēt DPT NV ātrumu, ir metode, kuras pamatā ir armatūrai piegādātā sprieguma maiņa, ko veic, izmantojot īpašu regulējamu pārveidotāju. Tiristoru pārveidotājus galvenokārt izmanto kā atsevišķus strāvas avotus. Piedziņas mehānisko īpašību stingrība saskaņā ar sistēmu "pārveidotājs - DCT NV" ir gandrīz nemainīga. Mehāniskie raksturlielumi ir viena otrai paralēlu taisnu līniju saime. Šeit regulēšanas diapazons, gludums un precizitāte ir augstāka nekā ar citām regulēšanas metodēm. Tāpēc šī piedziņas sistēma tiek izmantota mehānismiem, kuriem nepieciešama dziļa un vienmērīga ātruma kontrole.
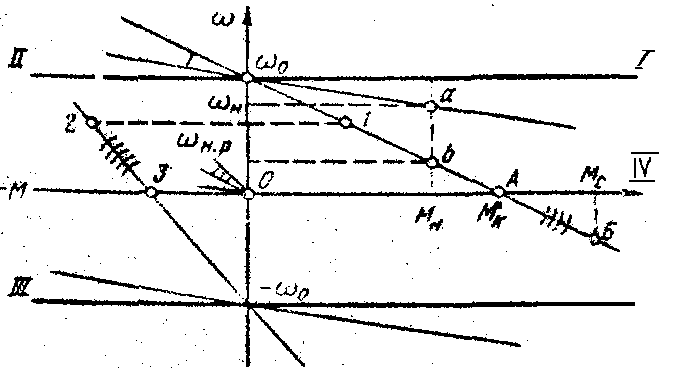
Papildu rezistoru aprēķins DPT NV armatūras ķēdē. Ja ir zināms dabiskais elektromehāniskais vai mehāniskais raksturlielums 1 dzinējs (6.4. att.) un tā pases dati, tad pretestības aprēķins R d, ja tas ir iekļauts armatūras ķēdē, vēlamais mākslīgais raksturlielums 2 šķērsos punktu A ar norādītajām koordinātām ω un, es un vai ω un, M un, var veikt ar šādām visizplatītākajām metodēm.
Rīsi. 6.4. DPT HB raksturlielumi vērtības aprēķināšanai
vadības rezistori
Proporciju metode. Uzrakstīsim ātruma kritumu attiecību pie strāvas es un vai brīdis M un uz dabisko Δω e un vēlamo mākslīgo Δω un raksturlielumiem:
Δω e / Δω u = es un R es / ( es un ( R es + R e)) = R es / ( R es + R e).
Pēc tam vēlamā vērtība
R d = R i (Δω un / Δω e - 1).
Segmentu metode neprasa zināšanas par motora iekšējās pretestības vērtību R i (turklāt tā vērtību var noteikt pēc zināmas dabas īpašības).
Uz dotā mākslīgā raksturlīknes (skat. 6.4. att.) uzrakstīsim izteiksmi motora apgriezieniem pie nominālās strāvas. es n, brīdis M n, magnētiskā plūsma F n un spriegums U n:
ω un = U n / (kF n) (1 - es n R/ U n),
kur U n / (kF n) \u003d ω 0.
ω un = ω 0 (1 – R / R n).
Šeit R n = U n/ es n - tā sauktā nominālā pretestība, kas ir bāzes vērtība aprēķinos, Ohm.
Attiecība
R / U n \u003d (ω 0 - ω un) / ω 0 \u003d δ
atspoguļo svarīgu NV DPT īpašību: relatīvā ātruma starpība δ \u003d Δω / ω 0 ir vienāda ar armatūras ķēdes relatīvo aktīvo pretestību R / R n.
Norādīsim attēlā. 6.4 raksturīgie punkti a, b,Ar, d un ņemiet vērā, ka ω 0 – ω un = Δω = dūzis, ω 0 = reklāma. Tad R = R n Δω / ω 0 = R n dūzis/reklāma; R d = R n bAr/reklāma; R i = R n ab /reklāma.
Tādējādi, lai atrastu R d vispirms ir jānosaka segmentu garums atbilstoši raksturlielumiem bAr un reklāma plkst nominālā strāva vai griezes momentu un aprēķināt nominālo pretestību R n = U n/ es n.
Papildu rezistoru aprēķinu var veikt arī, izmantojot šādas formulas noteiktai pieļaujamajai strāvai es papildu, ko nosaka pieļaujamā momenta vērtība M papildu vai nosacījumi iedarbināšanai, atpakaļgaitai un bremzēšanai.
Rezistoru pretestība R d1 sākumā ( E = 0)
R q1 = ( U / es pievienot) - R es
Rezistoru pretestība R d2 dinamiskās bremzēšanas laikā
R q2 = ( E / es pievienot) - R es ≈ ( U / es pievienot) - R I).
Rezistoru pretestība R d3, braucot atpakaļgaitā vai bremzējot ar pretpārslēgšanos
R d3 = (( U + E) / es pievienot) - R i ≈ (2 U / es pievienot) - R es
Piemērs . DPT NV tipam PBST-53 ir šādi pases dati: R n = 4,8 kW; n n = 1500 apgr./min; U n = 220 V; es n = 24,2 A; R i = 0,38 omi; es v.n = 0,8 A. Ir jānosaka:
1) rezistora pretestība, kuras iekļaušana motora armatūras ķēdē nodrošinās mākslīgā mehāniskā raksturlīknes pāreju caur punktu ar koordinātām ω un = 90 rad/s, M n = 25 Nm;
2) rezistoru pretestība, kuru iekļaušana ierobežos strāvu palaišanas un bremzēšanas laikā, pretēji līmenim es pievienot = 3 es n.
Ja ierosmes tinums un motora armatūra ir savienoti ar līdzstrāvas tīklu ar spriegumu U, tad rodas elektromagnētiskais griezes moments M em. Noderīgais griezes moments M uz motora vārpstas ir mazāks par elektromagnētisko pēc pretdarbības momenta, ko mašīnā rada berzes spēki, un vienāds ar momentu M x režīmā x.x, t.i. M \u003d M em -M x.
Starta griezes moments motoram jābūt lielākam par statisko bremzi M t rotora miera stāvoklī, pretējā gadījumā motora armatūra nesāks griezties. Līdzsvara stāvoklī (pie n = const) ir rotācijas M un bremzēšanas M t momentu līdzsvars:
M \u003d M em - M x \u003d M t (8)
No mehānikas ir zināms, ka mehāniskā jauda dzinēju var izteikt ar griezes momentu un leņķiskais ātrums
Tāpēc lietderīgais dzinēja griezes moments M (N m), kas izteikts kā lietderīgā jauda P (kW) un griešanās ātrums n (apgr./min),
M=9550P/n (10)
Apspriedīsim dažus svarīgus līdzstrāvas motoru palaišanas un darbības jautājumus. No vienādojuma elektriskais stāvoklis dzinējs no tā izriet
I i \u003d (U - E) / R i (11)
Darba režīmā armatūras strāva I I ir ierobežota e. d.s. E ja n ir aptuveni vienāds ar n nom. Palaišanas brīdī n = 0, e. d.s. E = 0 un sākuma strāva I p \u003d U / R i ir 10-30 reizes lielāks par nominālo. Tāpēc dzinēja tieša iedarbināšana, t.i., tieša armatūras pieslēgšana tīkla spriegumam, nav pieļaujama. Lai ierobežotu armatūras lielo palaišanas strāvu, pirms palaišanas virknē ar armatūru tiek ieslēgts palaišanas reostats R p ar nelielu pretestību. Šajā gadījumā pie E = O
I p \u003d U / (R i - R p)<< U/R я (12)
Reostata pretestība Rp tiek izvēlēta atbilstoši pieļaujamajai armatūras strāvai.
Dzinējam paātrinoties līdz nominālajam ātrumam e. d.s. E palielinās, strāva samazinās, un palaišanas reostats tiek pakāpeniski un pilnībā noņemts (iedarbināšanas reostati tiek aprēķināti īslaicīgai ieslēgšanai). Regulējošais reostats R reg ierosmes ķēdē ar salīdzinoši lielu pretestību (desmitiem un simtiem omi) pirms dzinēja iedarbināšanas tiek pilnībā noņemts, lai palaišanas laikā ierosmes strāva un statora magnētiskā plūsma F būtu nomināla. Tas noved pie palaišanas griezes momenta palielināšanās, kas nodrošina ātru un vieglu dzinēja paātrinājumu.
Pēc iedarbināšanas un paātrinājuma notiek dzinēja vienmērīga darbība, kurā bremzēšanas moments uz vārpstas Mt tiks līdzsvarots ar dzinēja radīto momentu M em , i., M em == M t ( par n = konst.)
Līdzstrāvas motori var atjaunot vienmērīgu darbības stāvokli, ko traucē bremzēšanas griezes momenta izmaiņas, t.i., tie var attīstīt griezes momentu M , vienāds ar jauno bremzēšanas momenta M t vērtību pie attiecīgi jauna ātruma n .
Patiešām, ja slodzes M t bremzēšanas moments izrādās lielāks par dzinēja griezes momentu M em, tad armatūras ātrums samazināsies. Pie nemainīga sprieguma U un plūsmas F tas izraisīs e samazināšanos. d.s. E armatūra, armatūras strāvas un griezes momenta palielināšanās, līdz tiek sasniegts līdzsvars, pie kura M em \u003d M t un n "
Frekvences kontrole
Līdzstrāvas motora armatūras ātrumu nosaka, pamatojoties uz elektriskā stāvokļa vienādojumu U = E + R I I I pēc e aizvietošanas tajā. d.s. E = cfn:
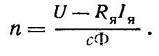 (13)
(13)
Sprieguma kritums armatūrā R I I I ir neliels: pie nominālās slodzes tas nepārsniedz 0,03 - 0,07 U nom.
Tādējādi līdzstrāvas motora ātrums ir tieši proporcionāls pielietotajam tīkla spriegumam un apgriezti proporcionāls statora magnētiskajai plūsmai . No (13) vienādojuma izriet, ka dzinēja apgriezienu skaitu var kontrolēt divos veidos: mainot statora plūsmu Ф vai dzinējam pievadīto spriegumu U. Ātruma regulēšana, mainot mašīnas magnētisko lauku, tiek veikta, izmantojot regulēšanas reostatu motora ierosmes ķēdē. Motoram piegādātais spriegums tiek mainīts, regulējot avota spriegumu.
Armatūras ķēdei varat pievienot papildu reostatu. Šajā gadījumā palaišanas reostats tiek aizstāts ar palaišanas reostatu. Pēc tam vienādojumam (13) ir forma
 (14)
(14)
No tā izriet, ka motora apgriezienu skaitu var regulēt, mainot tīkla spriegumu, balasta reostata pretestību vai statora plūsmu.
Dzinēja maiņa. No dzinēja griezes momenta vienādojuma M em \u003d kFI i izriet, ka apgriešanu, t.i., mainot armatūras griešanās virzienu, var veikt, mainot strāvas virzienu ierosmes tinumā (plūsma Ф) vai armatūras strāva.
Lai apgrieztu motoru “ceļā”, tiek mainīts armatūras strāvas virziens (pārslēdzot armatūras vadus), un ierosmes tinums netiek pārslēgts, jo tam ir liela induktivitāte un tā ķēdes pārraušana ar strāvu ir nepieņemama. Atvienotā motora apgriešana tiek veikta arī, mainot strāvas virzienu lauka tinumā (pārslēdzot tā izejas).
Krievijas Federācijas Izglītības un zinātnes ministrija
SEI VPO Dienvidurālas Valsts universitāte
Filiāle Zlatoustā
Līdzstrāvas motori
ZD-431.583.270102
Pabeidza: Šaripova Yu.R.
Grupa: ZD-431
Pārbaudījis: Rumjancevs.E.
1. Ievads
2. Līdzstrāvas motoru ierīce un darbības princips
3. Dzinēju iedarbināšana
4. Motoru tehniskie dati
5. Līdzstrāvas motoru efektivitāte
6 Līdzstrāvas motora raksturlielumi
6.1. Veiktspējas dati
6.2. Mehāniskais raksturlielums
7. Izmantotās literatūras saraksts
1. Ievads
Līdzstrāvas elektriskās mašīnas tiek plaši izmantotas dažādās nozarēs.
Līdzstrāvas elektromotoru ievērojamais sadalījums ir izskaidrojams ar to vērtīgajām īpašībām: lieli palaišanas, bremzēšanas un pārslodzes griezes momenti, salīdzinoši liels ātrums, kas ir svarīgs, braucot atpakaļgaitā un bremzējot, plaša un vienmērīga ātruma kontroles iespēja.
Līdzstrāvas motori tiek izmantoti regulējamām piedziņām, piemēram, dažādu mašīnu un mehānismu piedziņām. Šo elektromotoru jauda sasniedz simtiem kilovatu. Saistībā ar ražošanas procesu un mehānismu vadības automatizāciju paplašinās mazjaudas vispārējas nozīmes līdzstrāvas motoru ar jaudu no vienībām līdz simtiem vatu pielietojuma joma.
Atkarībā no strāvas ķēdes līdzstrāvas iekārtas ierosmes tinumus iedala vairākos veidos (ar neatkarīgu, paralēlu, seriālo un jaukto ierosmi).
Līdzstrāvas mašīnu gada izlaide Krievijas Federācijā ir daudz mazāka nekā maiņstrāvas mašīnu produkcija, kas ir saistīta ar līdzstrāvas motoru augstām izmaksām.
Sākumā tika izveidotas līdzstrāvas iekārtas. Nākotnē tos lielākoties nomainīja maiņstrāvas iekārtas. Pateicoties vienmērīgai un ekonomiskai rotācijas ātruma regulēšanas iespējai, līdzstrāvas motori saglabā savu dominējošo lomu transportā, metalurģijas mašīnu vadīšanā, celtņos un pacelšanas un transporta mehānismos. Automatizācijas sistēmās līdzstrāvas iekārtas tiek plaši izmantotas kā izpilddzinēji, motori pašierakstu lentes mehānismu piedzināšanai, kā tahoģeneratori un elektrisko mašīnu pastiprinātāji.
2. Līdzstrāvas motoru ierīce un darbības princips
Līdzstrāvas mašīnu (ģeneratoru un motoru) ierīce vienkāršotā veidā parādīta 1. att. Galvenie 2 un papildu 4 stabi ir piestiprināti pie mašīnas statora tērauda korpusa 1. Uz galvenajiem stabiem atrodas ierosmes tinums 3, uz papildu poliem atrodas papildu polu tinums 5. Ierosmes tinums rada mašīnas magnētisko plūsmu F.
1. att
Uz motora vārpstas 10 ir nostiprināta cilindriska magnētiskā ķēde 6, kuras rievās atrodas armatūras tinums 7. Armatūras tinuma posmi ir piestiprināti pie kolektora 9. Stacionāras birstes 8 ir nospiestas pret to ar atsperēm. piestiprināts pie motora vārpstas sastāv no vairākām vara plāksnēm. Ar kolektora un suku palīdzību armatūras tinumu savieno ar ārēju elektrisko ķēdi. Motoros tie arī kalpo, lai ārējās ķēdes strāvu, kas ir nemainīga virzienā, pārvērstu strāvā, kas maina virzienu armatūras tinuma vadītājos.
Papildu stabi ar tinumu, kas atrodas uz tiem, samazina dzirksteļošanu starp sukām un iekārtas komutatoru. Papildu stabu tinumi ir savienoti virknē ar armatūras tinumu un bieži vien netiek parādīti elektriskajās ķēdēs.
Lai samazinātu jaudas zudumus, armatūras magnētiskais serdenis ir izgatavots no atsevišķām tērauda loksnēm. Visi tinumi ir izgatavoti no izolētas stieples. Papildus motoriem ar diviem galvenajiem stabiem ir līdzstrāvas iekārtas ar četriem vai vairākiem galvenajiem poliem. Šajā gadījumā attiecīgi palielinās papildu stabu un suku komplektu skaits.
Ja motors ir pievienots līdzstrāvas sprieguma tīklam, tad ierosmes tinuma radītā magnētiskā lauka un strāvas armatūras vadītājos mijiedarbība izraisa griezes momentu, kas iedarbojas uz armatūru:
![]() (1)
(1)
kur K M ir koeficients atkarībā no mašīnas konstrukcijas parametriem; Ф - viena pola magnētiskā plūsma; I I - armatūras strāva.
Ja motora griezes moments pie n = 0 pārsniedz bremzēšanas momentu, ar kuru motors ir noslogots, tad armatūra sāks griezties. Palielinoties rotācijas ātrumam n, palielinās enkura izraisītais EML. Tas noved pie armatūras strāvas samazināšanās:
![]() (3)
(3)
kur r I ir armatūras pretestība.
Strāvas I I samazināšanās sekas ir dzinēja griezes momenta samazināšanās. Kad dzinēja un slodzes griezes momenti ir vienādi, griešanās ātrums pārstāj mainīties.
Motora griezes momenta virziens un līdz ar to arī armatūras griešanās virziens ir atkarīgs no magnētiskās plūsmas un strāvas virziena armatūras tinuma vadītājos. Lai mainītu motora griešanās virzienu, ir jāmaina armatūras strāvas vai lauka strāvas virziens.
3. Dzinēju iedarbināšana
No formulas (3) izriet, ka pirmajā mirklī pēc dzinēja ieslēgšanas līdzstrāvas sprieguma tīklā, t.i. kad un,
Tā kā pretestība r I ir maza, armatūras strāva var būt 10 ... 30 reizes lielāka par motora nominālo strāvu, kas ir nepieņemami, jo tas izraisīs spēcīgu dzirksteļošanu un kolektora iznīcināšanu. Turklāt pie šādas strāvas rodas nepieņemami liels motora griezes moments, un ar biežu iedarbināšanu ir iespējama armatūras tinuma pārkaršana.
Lai samazinātu palaišanas strāvu armatūras ķēdē, ir iekļauts palaišanas rezistors, kura pretestība samazinās līdz nullei, palielinoties motora apgriezieniem. Ja dzinēja iedarbināšana ir automatizēta, tad palaišanas rezistors sastāv no vairākiem posmiem, kas tiek izslēgti sērijveidā, palielinoties ātrumam.
Armatūras palaišanas strāva
![]()
Motoram paātrinoties, EMF palielinās armatūras tinumā, un, kā izriet no formulas (3), tas noved pie armatūras strāvas I I samazināšanās. Tāpēc, palielinoties dzinēja apgriezieniem, armatūras ķēdes pretestība samazinās. Lai iegūtu lielu palaišanas griezes momentu ar salīdzinoši mazu palaišanas strāvu, motors tiek iedarbināts ar vislielāko magnētisko plūsmu. Tāpēc ierosmes strāvai palaišanas brīdī jābūt maksimāli pieļaujamai, t.i. nomināls.
4. Motoru tehniskie dati
Motora pasē un līdzstrāvas motoru uzziņu literatūrā ir norādīti šādi tehniskie dati: nominālais spriegums U un jauda P n, griešanās ātrums n n, strāva I n, efektivitāte.
Zem nominālā U n saprotiet spriegumu, kuram ir paredzēts armatūras tinums un kolektors, kā arī vairumā gadījumu paralēlā lauka tinums. Ņemot vērā nominālo spriegumu, tiek izvēlēti motora elektriskās izolācijas materiāli.
Nominālā strāva I n - maksimālā pieļaujamā strāva (patērē no tīkla), pie kuras dzinējs uzsilst līdz augstākajai pieļaujamajai temperatūrai, darbojoties režīmā (ilgtermiņa, intermitējoša, īslaicīga), kuram tas ir paredzēts:
![]()
kur I yan - armatūras strāva pie nominālās slodzes; I ext - ierosmes tinuma strāva pie nominālā sprieguma.
Jāņem vērā, ka paralēlās ierosmes motora ierosmes strāva I vn ir salīdzinoši maza, tāpēc pie nominālās slodzes to parasti ņem
Nominālā jauda R n ir jauda, ko dzinējs attīsta uz vārpstas, strādājot ar nominālo slodzi (griezes momentu) un ar nominālo apgriezienu skaitu n n.
Rotācijas ātrums n n, un efektivitāte atbilst motora darbībai ar strāvu I n, spriegumu U n bez papildu rezistoriem motora ķēdēs.
Vispārīgā gadījumā jauda uz vārpstas P 2, moments M un griešanās ātrums n ir saistīti ar attiecību:
Motora patērētā jauda no tīkla P 1, vērtības P 2, efektivitāte, U, I ir saistītas ar attiecībām:
Ir skaidrs, ka šīs attiecības ir spēkā arī motora nominālajam darbības režīmam.
5. Līdzstrāvas motoru efektivitāte
Efektivitāte ir vissvarīgākais līdzstrāvas motoru rādītājs. Jo lielāks tas ir, jo mazāku jaudu P un strāvu I patērē motors no tīkla ar tādu pašu mehānisko jaudu. Kopumā atkarība ir šāda:
![]() (9)
(9)
kur - zudumi armatūras tinumā; - zudumi ierosmes tinumā; - zudumi armatūras magnētiskajā ķēdē; - mehāniskie zudumi.
Jaudas zudumi nav atkarīgi un maz ir atkarīgi no dzinēja slodzes.
Motori tiek aprēķināti tā, lai maksimālā efektivitātes vērtība būtu apgabalā, kas ir tuvu nominālajai jaudai. Dzinēju darbība ar zemām slodzēm ir nevēlama mazo r i vērtību dēļ. Dzinēju efektivitātes vērtības ar dažādām ierosmes metodēm un jaudu no 1 līdz 100 kW pie nominālās slodzes ir atšķirīgas un vidēji ir 0,8.
6. Līdzstrāvas motoru raksturojums
6.1. Darbības īpašības
Strādniekus sauc par regulēšanas, ātrgaitas, griezes momenta un efektivitātes. īpašības.
Kontroles raksturlielums
Vadības raksturlielums atspoguļo griešanās ātruma P atkarību no ierosmes strāvas Ib, ja armatūras strāva Ia un tīkla spriegums U paliek nemainīgi, t.i., n=f(Iv) pie Ia=const un U=const.
Kamēr mašīnas magnētiskās piedziņas tērauds nav piesātināts, plūsma Ф mainās proporcionāli ierosmes strāvai Iв. Šajā gadījumā kontroles raksturlielums ir hiperbolisks. Ar piesātinājumu pie lielām strāvām Iv raksturlielums tuvojas lineāram (2. att.). Pie zemām strāvas Iv vērtībām griešanās ātrums strauji palielinās. Tāpēc, kad motora ierosmes ķēde tiek pārtraukta (Iv \u003d 0) ar paralēlu ierosmi, tā griešanās ātrums sasniedz nepieņemamas robežas, kā saka: "Dzinējs darbojas mežonīgi." Izņēmums var būt mikromotori, kuriem ir salīdzinoši liels tukšgaitas griezes moments M0.

Rīsi. 2. Dzinēja regulēšanas raksturlielums
Sērijveida ierosmes motoros Iv \u003d Ia. Pie zemām slodzēm armatūras strāva Ia ir maza un griešanās ātrums var būt pārāk liels, tāpēc palaišana un darbība ar zemām slodzēm nav pieļaujama. Mikromotori arī. iepriekšējā gadījumā var būt izņēmums.
ātruma īpašības.
Ātruma raksturlielumi dod griešanās ātruma n atkarību no lietderīgās jaudas P2 uz motora vārpstas, ja tīkla spriegums U un ierosmes ķēdes vadības reostata pretestība rv paliek nemainīgs, t.i., n=f(P2), ar U=const un rв = const .
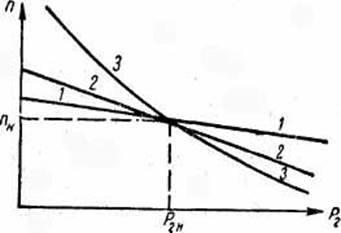
Rīsi. 3. Ātruma raksturlielumi
Palielinoties armatūras strāvai, palielinoties šunta motora mehāniskajai slodzei, vienlaikus palielinās sprieguma kritums armatūrai un notiek armatūras reakcija, kas parasti darbojas demagnetizējošā veidā. Pirmais iemesls ir samazināt dzinēja griešanās ātrumu, otrais - palielināt. Armatūras sprieguma krituma ietekmei parasti ir lielāka ietekme. Tāpēc paralēlās ierosmes motora ātruma raksturlielumam ir nedaudz krītošs raksturs (līkne 1, 3. att.).
Sērijas ierosmes motorā armatūras strāva ir ierosmes strāva. Rezultātā dzinēja ar secīgu ierosmi apgriezienu raksturlielums ir tuvu hiperboliskam. Palielinoties slodzei, kad magnētiskā ķēde kļūst piesātināta, raksturlielums kļūst vienkāršāks (3. līkne 3. attēlā).
Saliktā motorā, kad tinumi tiek ieslēgti saskaņoti, ātruma raksturlielums ieņem starpstāvokli starp paralēlās un virknes ierosmes motora raksturlielumiem (2. līkne).
Momenta īpašības.
Griezes momenta raksturlielumi parāda, kā moments M mainās, mainoties lietderīgajai jaudai P2 uz motora vārpstas, ja tīkla spriegums U un vadības reostata pretestība rv ierosmes ķēdē paliek nemainīgs, t.i., M = f(P2) ), ar U=const, rv=const.
Noderīgs moments uz motora vārpstas
Ja paralēlās ierosmes motora rotācijas ātrums nemainītos līdz ar slodzi, tad momenta Mmex atkarība no lietderīgās jaudas grafiski attēlotu taisnu līniju, kas iet caur sākuma punktu. Faktiski griešanās ātrums samazinās, palielinoties slodzei. Tāpēc lietderīgā momenta raksturlielums ir nedaudz saliekts uz augšu (2. līkne, 4. att.). Šajā gadījumā elektromagnētiskā momenta M līkne iet virs lietderīgā momenta Mmex līknes par nemainīgu vērtību, kas vienāda ar dīkstāves momentu M0 (līkne 1).
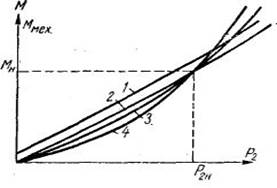
Rīsi. 4. Momentu raksturojums
Sērijveida ierosmes motorā griezes momenta raksturlielums tuvojas paraboliskam, jo griezes momenta izmaiņas no slodzes strāvas notiek saskaņā ar parabolas likumu, līdz tērauds ir piesātināts. Ar piesātinājumu atkarība kļūst skaidrāka (4. līkne). Saliktā motorā griezes momenta raksturlielums (līkne 3) ieņem starpstāvokli starp paralēlās un virknes ierosmes motora raksturlielumiem.
Efektivitātes izmaiņu raksturojums.
Efektivitātes atkarības no slodzes līknei ir visiem dzinējiem raksturīga forma (5. att.). Līkne iet cauri sākuma punktam un strauji aug, jo lietderīgā jauda palielinās līdz 1/4 no nominālās jaudas. Pie jaudas P2, kas vienāda ar aptuveni 2/3 no nominālās jaudas, efektivitāte parasti sasniedz maksimālo vērtību. Kad slodze palielinās līdz nominālajai efektivitātei, tā paliek nemainīga vai nedaudz samazinās.
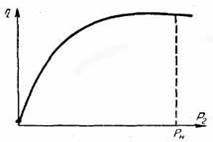
Rīsi. 5. Dzinēja efektivitātes izmaiņas
6.2. Mehāniskais raksturlielums
Vissvarīgākais dzinēja raksturlielums ir mehāniskais n(M). Tas parāda, kā dzinēja apgriezienu skaits ir atkarīgs no attīstītā griezes momenta. Ja motora tinumiem tiek pielikts nominālais spriegums un tā ķēdēs nav papildu rezistoru, tad motoram ir mehānisks raksturlielums, ko sauc par dabisku. Uz dabiskajām īpašībām ir punkts, kas atbilst motora nominālajiem datiem (M n, P i utt.). Ja spriegums uz armatūras tinuma ir mazāks par nominālo, vai I in< I вн, то двигатель будет иметь различные искусственные механические характеристики. На этих характеристиках двигатель работает при пуске, торможении, реверсе и регулировании частоты вращения.
Pārveidojot izteiksmi (3) attiecībā pret rotācijas frekvenci, iegūstam elektromehāniskās īpašības n(I i) vienādojumu:
![]() (7)
(7)
Pēc strāvas I i aizstāšanas vienādojumā (7) saskaņā ar formulu (1), iegūstam mehāniskās īpašības n (M) vienādojumu:
![]() (8)
(8)
Ja Ф = const, paralēlās ierosmes motora elektromehāniskās n (I I) un mehāniskās n (M) īpašības ir taisnas līnijas. Tā kā magnētiskā plūsma nedaudz mainās armatūras reakcijas dēļ, raksturlielumi faktiski nedaudz atšķiras no taisnām līnijām.
Kad motors darbojas tukšgaitā (M = 0), motoram ir tukšgaitas apgriezienu skaits, ko nosaka (8) vienādojuma pirmais elements. Palielinoties slodzei, n samazinās. Kā izriet no (8) vienādojuma, tas ir saistīts ar armatūras pretestības r i klātbūtni.
Tā kā r i nav liels, tad, palielinoties griezes momentam, dzinēja apgriezieni mainās maz, un motoram ir stingrs dabiskais mehāniskais raksturlielums (6. att., 1. raksturlielums).
No (8) vienādojuma izriet, ka ir trīs veidi, kā kontrolēt griešanās ātrumu noteiktai nemainīgai slodzei (M = const):
a) armatūras ķēdes pretestības izmaiņas;
b) motora magnētiskās plūsmas izmaiņas;
c) sprieguma maiņa armatūras spailēm.

Rīsi. 6 Mehāniskie parametri
Lai kontrolētu griešanās ātrumu pirmajā veidā armatūras ķēdē. jāiekļauj papildu pretestība r d. Tad (8) vienādojumā pretestība jāaizstāj ar r i + r d.
Kā izriet no (8) vienādojuma, rotācijas ātrums n ir saistīts ar armatūras ķēdes pretestību r i + r d pie nemainīgas slodzes (M = const) ar lineāru sakarību, t.i. pieaugot pretestībai, ātrums samazinās. Dažādas pretestības r d atbilst dažādiem mākslīgiem mehāniskiem raksturlielumiem, no kuriem viens parādīts 2. att. (2. raksturlielums). Izmantojot raksturlielumu 2, ar noteiktu griezes momentu M1, jūs varat iegūt ātrumu n2.
Ātruma maiņa otrajā veidā tiek veikta, izmantojot regulējamu sprieguma avotu UD2. Mainot tā spriegumu ar regulatoru R2, ir iespējams mainīt ierosmes strāvu I V un līdz ar to arī motora magnētisko plūsmu. Kā redzams no (8) vienādojuma, pie nemainīgas slodzes (M = const) rotācijas frekvence ir kompleksā atkarībā no magnētiskās plūsmas Ф. (8) vienādojuma analīze parāda, ka noteiktā magnētiskās plūsmas diapazonā Ф , pēdējās samazināšanās izraisa rotācijas frekvences palielināšanos. Tieši šis plūsmas maiņas diapazons tiek izmantots ātruma regulēšanā.
Katra magnētiskās plūsmas vērtība atbilst dzinēja mākslīgam mehāniskam raksturlielumam, no kuriem viens ir parādīts 2. attēlā (4. raksturlielums). Ar raksturlieluma 4 palīdzību šobrīd M1 var iegūt ātrumu n4.
Lai regulētu griešanās ātrumu, mainot spriegumu pie armatūras spailēm, ir nepieciešams samērā jaudīgs regulējama sprieguma avots. Katra sprieguma vērtība atbilst dzinēja mākslīgam mehāniskam raksturlielumam, no kuriem viens ir parādīts att.2(3. pazīme). Izmantojot raksturlielumu 3, ar noteiktu griezes momentu M1, jūs varat iegūt ātrumu n3.
Bibliogrāfija
1. Katsman M.M. Elektriskās automašīnas. -M.: Augstāk. skola, 1993.
2. Kopilovs I.P. Elektriskās automašīnas. -M.: Energoatomizdat, 1986. gads
Līdzstrāvas motoriem var būt neatkarīga, paralēla, virknes vai jaukta ierosme (6.1. att.).
Rīsi. 6.1. Neatkarīgas līdzstrāvas motora ķēdes ( a),
paralēli ( b), secīgi ( iekšā) un sajaukts ( G) uzbudinājums
(shēmas "c" augšējā daļa pieder shēmai "a")
Paralēlā ierosmes motorā lauka tinums ir savienots paralēli armatūras spailēm. Bet strāva, kas plūst caur šo tinumu, atšķirībā no armatūras strāvas, nav atkarīga no slodzes, un to nosaka armatūrai pievadītais spriegums un ierosmes ķēdes kopējā pretestība. Šī iemesla dēļ šunta ierosmes motoru sauc arī par neatkarīgas ierosmes motoru.
Griezes moments M Līdzstrāvas motors un tā EMF E tiek noteiktas pēc formulām
M= uz F es es; E= kФω,
kur k ir dzinēja projektētais koeficients;
Ф – magnētiskā plūsma, Wb;
es i - armatūras strāva, A.
ω ir leņķiskais ātrums, rad/s.
Elektromehāniskie vienādojumi ω = ƒ ( es i) un mehāniskā ω = ƒ ( M) raksturlielumiem ir forma
ω = U/(kF) – ( R es + R p) / (k F) es es;
ω = U/(kF) – ( R es + R p) / (līdz 2 F2) M.
Ideālās tukšgaitas leņķiskais ātrums (pie es i = 0 vai M = 0)
ω 0 = U/(kF).
Uz att. 6.2 parāda līdzstrāvas motora ar neatkarīgu ierosmi (DPT NV) mehāniskās īpašības visos darbības režīmos. Motora režīma raksturlielumu raksturīgie punkti ir: ideālās tukšgaitas punkts (ω 0, M= 0); nominālā režīma punkts (ω n, M n); īssavienojuma punkts (ω = 0, M = M uz).
Mehāniskā raksturlieluma stingrību nosaka ierosmes plūsma un enkura ķēdes pretestība:
β = d M/dω = - līdz 2 Ф 2 / ( R es + R p) = - M uz / ω.
Rīsi. 6.2. Līdzstrāvas motora ar neatkarīgu ierosmi kombinētie mehāniskie raksturlielumi
Augstākā stinguma moduļa vērtība atbilst dabiskajam mehāniskajam raksturlielumam, jo ierosmes strāva ir vienāda ar nominālo strāvu un vadības pretestību R p \u003d 0. Palielinoties reostata pretestībai R p palielinās mehāniskā raksturlieluma slīpums un samazinās leņķiskais ātrums. Par noteiktu pretestības vērtību R p un nominālais griezes moments M n dzinēja leņķiskais ātrums
ω n.r = ω 0 (1 – es n ( R es + R R) / U n.
Lai aprēķinātu mehāniskos raksturlielumus, ir jāzina motora armatūras pretestība R i, kas ir norādīts katalogos. Ja nav rūpnīcas datu, vērtība R Es atrodu aptuveni pēc formulas
R i \u003d 0,5 (1 - ŋ n) ( U n/ es n).
Tā kā DPT NV mehāniskie raksturlielumi ir nepārprotami, to attēlošanai pietiek ar diviem punktiem:
1) ω = ω 0 un M = 0,
2) ω = ω n (vai ω = ω n.r) un M = M n.
DPT NV ir iespējami šādi trīs elektriskās bremzēšanas režīmi.
1. Reģeneratīvā bremzēšana, kas rodas, ja dzinēja apgriezieni pārsniedz ideālos tukšgaitas apgriezienus. Tas ir visekonomiskākais, jo bremzēšanas enerģija tiek nodota elektrotīklam. Mehāniskie raksturlielumi šajā režīmā ir atbilstošo motora režīma raksturlielumu turpinājums II kvadrantā. Reģeneratīvās bremzēšanas laikā motora ķēde nemainās.
2. Dinamiskā bremzēšana. Motora armatūra ir atvienota no tīkla un īssavienojums ar pretestību. Šajā gadījumā kustīgo daļu (mehānisma un motora armatūras) mehāniskā enerģija tiek pārveidota par elektroenerģiju, kas tiek zaudēta siltumenerģijas veidā enkura ķēdes pretestībā. Mehāniskie raksturlielumi šajā bremzēšanas režīmā iet caur izcelsmi (6.2. attēlā - līnijas ar trim iecirtumiem).
3. Reversā bremzēšana veic divos veidos:
1) augstas pretestības ieviešana armatūras ķēdē.Šajā gadījumā motora griezes moments kļūst mazāks par statiskās slodzes griezes momentu. M Ar. Dzinējs apstājas (punktā A) un pēc tam griezes momenta ietekmē M c sāk griezties otrā virzienā, attīstot bremzēšanas momentu; punktā B iestājas līdzsvara stāvoklis. Mehāniskie raksturlielumi ir motora režīma atbilstošo raksturlielumu turpinājums (6.2. att. - līnijas ar četriem serifiem);
2) bremzēšana, pa ceļam pārslēdzot armatūras tinuma polaritāti. Motors darbojas punktā 1 , pēc pārslēgšanas tas pārslēgsies uz reostatisko raksturlielumu punktā 2. Gar līniju 2–3 notiek palēninājums (līnija ar pieciem serifiem). Punktā 3 motors apstājas un ir jāatvieno no elektrotīkla, lai izvairītos no pārslēgšanās uz motora režīmu ar apgrieztu griešanos.
AT Līdzstrāvas motors ar virknes ierosmide-niem armatūras strāva ir arī ierosmes strāva. Palielinoties slodzei, palielinās ierosmes magnētiskā plūsma, kā rezultātā leņķiskais ātrums samazinās atbilstoši vienādojumam (6.1) un motora mehāniskais raksturlielums būs mīksts (6.3. att.). Pateicoties tam, NV DPT salīdzinoši viegli un vienmērīgi pārvar pārslodzes, un tam ir augsts palaišanas griezes moments. Šīs dzinēja īpašības ļauj to plaši izmantot transporta mehānismu piedziņā. Dzinēja mehāniskās īpašības ievērojami mīkstina, ja armatūras ķēdē tiek ievadīts reostats (6.3. att., līnijas ar vienu iecirtumu).
Rīsi. 6.3. Līdzstrāvas motora mehāniskie parametri
ar secīgu ierosmi
DPT PV nav iespējams ieviest reģeneratīvās bremzēšanas režīmu, jo tajā nav ideāla tukšgaitas ātruma.
Dinamiskā bremzēšana var veikt saskaņā ar shēmu ar pašiedrošanos un ar neatkarīgu ierosmi. Pirmajā gadījumā armatūra un ierosmes tinums tiek atvienoti no tīkla un slēgti reostatam. Uz izvairieties no iekārtas atgaisošanas, nepieciešams pārslēgt ierosmes tinumu (vai enkuru), lai nemainās strāvas virziens ierosmes tinumā. Šajā gadījumā mašīna tiek pašierināta pie noteiktas armatūras ķēdes pretestības tikai pie noteiktas leņķiskā ātruma vērtības; satraukti, tas rada bremzēšanas momentu. Mehāniskie raksturlielumi ir nelineāri (6.3. attēlā - līknes ar četriem iecirtumiem).
Dzinēja mehāniskie raksturlielumi dinamiskās bremzēšanas režīmā ar neatkarīgu ierosmi ir līdzīgi dzinēja ar neatkarīgu ierosmi atbilstošajiem raksturlielumiem (6.3. att. - līnijas ar diviem iegriezumiem). Šī bremzēšanas metode ir atradusi plašu pielietojumu, un pirmo metodi izmanto reti, galvenokārt avārijas gadījumā, piemēram, ja elektrotīkla spriegums neizdodas.
Bremzēšana ar opozīciju, tāpat kā DPT NV, tiek veikta divos veidos:
1) iekļaušana augstas pretestības armatūras ķēdē;
2) mainot armatūras tinuma polaritāti, atstājot nemainīgu strāvas virzienu ierosmes tinumā.
Ar pirmo metodi mehāniskais raksturlielums būs motora režīmam atbilstošā raksturlieluma turpinājums (6.3. attēlā - līnija ar trim iecirtumiem). Otrajā metodē bremzēšanu veic pa līniju 1 –2–3 .
Līdzstrāvas elektrisko piedziņu ātruma kontrole. DPT NV ātrumu var regulēt:
1) mainot pretestību armatūras ķēdē;
2) ierosmes plūsmas izmaiņas;
3) mainot armatūrai pievadīto spriegumu.
regula saskaņā ar pirmo metodi ir būtiski trūkumi:
- mehānisko raksturlielumu stingrība samazinās, samazinoties leņķiskajam ātrumam, un palielinās jaudas zudumi galvenajā ķēdē;
- kontroles diapazons ir ierobežots, it īpaši pie zemām slodzēm;
– neliels regulēšanas gludums un precizitāte.
Šo iemeslu dēļ šāda veida regulēšana tiek reti izmantota līdzstrāvas piedziņā.
Autors otrais veids magnētisko plūsmu iespējams regulēt tikai samazināšanās virzienā (jo nominālajā režīmā motora magnētiskā ķēde ir piesātināta), kas atbilst ātruma palielinājumam virs nominālā. Iespējamais ātruma regulēšanas diapazons standarta motoram nepārsniedz 2. Augšējo ātruma ierobežojumu ierobežo dzinēja armatūras elementu mehāniskā izturība - armatūras tinumu pārsēji, kolektors.
Galvenais veids, kā kontrolēt DPT NV ātrumu, ir metode, kuras pamatā ir armatūrai piegādātā sprieguma maiņa, ko veic, izmantojot īpašu regulējamu pārveidotāju. Tiristoru pārveidotājus galvenokārt izmanto kā atsevišķus strāvas avotus. Piedziņas mehānisko īpašību stingrība saskaņā ar sistēmu "pārveidotājs - DCT NV" ir gandrīz nemainīga. Mehāniskie raksturlielumi ir viena otrai paralēlu taisnu līniju saime. Šeit regulēšanas diapazons, gludums un precizitāte ir augstāka nekā ar citām regulēšanas metodēm. Tāpēc šī piedziņas sistēma tiek izmantota mehānismiem, kuriem nepieciešama dziļa un vienmērīga ātruma kontrole.
Papildu rezistoru aprēķins DPT NV armatūras ķēdē. Ja ir zināms dabiskais elektromehāniskais vai mehāniskais raksturlielums 1 dzinējs (6.4. att.) un tā pases dati, tad pretestības aprēķins R d, ja tas ir iekļauts armatūras ķēdē, vēlamais mākslīgais raksturlielums 2 šķērsos punktu A ar norādītajām koordinātām ω un, es un vai ω un, M un, var veikt ar šādām visizplatītākajām metodēm.
Rīsi. 6.4. DPT HB raksturlielumi vērtības aprēķināšanai
vadības rezistori
Proporciju metode. Uzrakstīsim ātruma kritumu attiecību pie strāvas es un vai brīdis M un uz dabisko Δω e un vēlamo mākslīgo Δω un raksturlielumiem:
Δω e / Δω u = es un R es / ( es un ( R es + R e)) = R es / ( R es + R e).
Pēc tam vēlamā vērtība
R d = R i (Δω un / Δω e - 1).
Segmentu metode neprasa zināšanas par motora iekšējās pretestības vērtību R i (turklāt tā vērtību var noteikt pēc zināmas dabas īpašības).
Uz dotā mākslīgā raksturlīknes (skat. 6.4. att.) uzrakstīsim izteiksmi motora apgriezieniem pie nominālās strāvas. es n, brīdis M n, magnētiskā plūsma F n un spriegums U n:
ω un = U n / (kF n) (1 - es n R/ U n),
kur U n / (kF n) \u003d ω 0.
ω un = ω 0 (1 – R / R n).
Šeit R n = U n/ es n - tā sauktā nominālā pretestība, kas ir bāzes vērtība aprēķinos, Ohm.
Attiecība
R / U n \u003d (ω 0 - ω un) / ω 0 \u003d δ
atspoguļo svarīgu NV DPT īpašību: relatīvā ātruma starpība δ \u003d Δω / ω 0 ir vienāda ar armatūras ķēdes relatīvo aktīvo pretestību R / R n.
Norādīsim attēlā. 6.4 raksturīgie punkti a, b,Ar, d un ņemiet vērā, ka ω 0 – ω un = Δω = dūzis, ω 0 = reklāma. Tad R = R n Δω / ω 0 = R n dūzis/reklāma; R d = R n bAr/reklāma; R i = R n ab /reklāma.
Tādējādi, lai atrastu R d vispirms ir jānosaka segmentu garums atbilstoši raksturlielumiem bAr un reklāma pie nominālās strāvas vai griezes momenta un aprēķiniet nominālo pretestību R n = U n/ es n.
Papildu rezistoru aprēķinu var veikt arī, izmantojot šādas formulas noteiktai pieļaujamajai strāvai es papildu, ko nosaka pieļaujamā momenta vērtība M papildu vai nosacījumi iedarbināšanai, atpakaļgaitai un bremzēšanai.
Rezistoru pretestība R d1 sākumā ( E = 0)
R q1 = ( U / es pievienot) - R es
Rezistoru pretestība R d2 dinamiskās bremzēšanas laikā
R q2 = ( E / es pievienot) - R es ≈ ( U / es pievienot) - R I).
Rezistoru pretestība R d3, braucot atpakaļgaitā vai bremzējot ar pretpārslēgšanos
R d3 = (( U + E) / es pievienot) - R i ≈ (2 U / es pievienot) - R es
Piemērs . DPT NV tipam PBST-53 ir šādi pases dati: R n = 4,8 kW; n n = 1500 apgr./min; U n = 220 V; es n = 24,2 A; R i = 0,38 omi; es v.n = 0,8 A. Ir jānosaka:
1) rezistora pretestība, kuras iekļaušana motora armatūras ķēdē nodrošinās mākslīgā mehāniskā raksturlīknes pāreju caur punktu ar koordinātām ω un = 90 rad/s, M n = 25 Nm;
2) rezistoru pretestība, kuru iekļaušana ierobežos strāvu palaišanas un bremzēšanas laikā, pretēji līmenim es pievienot = 3 es n.