Asinhronā motora darbības princips ir balstīts uz rotējošu magnētisko lauku izmantošanu un elektrotehnikas pamatlikumiem.
Motoru pieslēdzot trīsfāzu strāvas tīklam, statorā veidojas nemainīga lieluma, bet telpā rotējošs magnētiskais lauks, kura spēka līnijas šķērso rotora tinumu pagriezienus. Šajā gadījumā saskaņā ar elektromagnētiskās indukcijas likumu rotora tinumā tiek inducēts EML, kura vērtība ir proporcionāla krustošanās frekvencei. spēka līnijas. Inducētā EML iedarbībā vāveres būra rotorā rodas ievērojamas strāvas.
Saskaņā ar Ampēra likumu strāvu nesošie vadītāji magnētiskajā laukā ir pakļauti mehāniskiem spēkiem, kas pēc Lenca principa tiecas novērst cēloni, kas izraisa inducēto strāvu, t.i. rotora tinumu stieņu krustošanās ar rotējošā lauka spēka līnijām. Tādējādi radušies mehāniskie spēki griezīs rotoru lauka rotācijas virzienā, samazinot rotora tinuma stieņu šķērsošanas ātrumu ar magnētiskām spēka līnijām.
Rotors reālos apstākļos nevar sasniegt lauka rotācijas frekvenci, jo tad tā tinuma stieņi būtu nekustīgi attiecībā pret magnētiskā lauka līnijām un izzustu inducētās strāvas rotora tinumā. Tāpēc rotors griežas ar frekvenci, kas ir zemāka par lauka rotācijas frekvenci, t.i. nesinhronizējas ar lauku vai asinhroni.
Lai mainītu asinhronā motora rotora griešanās virzienu, ir jāmaina magnētiskā lauka griešanās virziens, t.i. mainiet statora tinumu fāzu secību, pārslēdzot jebkurus divus no trīs fāžu vadiem, kas baro motoru.
Magnētiskā lauka rotācijas frekvence n 1 (sinhronais ātrums) ir stingri atkarīgs no frekvences f 1 ieejas spriegums un polu pāru skaits lpp dzinējs: n 1 = 60f 1 /lpp.
No tā izriet, ka Krievijā pieņemtajā barošanas sprieguma rūpnieciskajā frekvencē ( f 1 \u003d 50 Hz), lielākais magnētiskā lauka apgriezienu skaits izrādās 3000 apgr./min. lpp= 1. Palielinoties polu pāru skaitam, samazinās magnētiskā lauka griešanās frekvence, līdz ar to samazinās arī rotora griešanās frekvence. Plkst lpp= 2,n= 1500 apgr./min utt.
Ja spēki, kas palēnina rotora rotāciju, ir mazi, tad rotors griežas ar frekvenci, kas ir tuvu lauka rotācijas frekvencei. Palielinoties slodzei uz motora vārpstas, rotora ātrums samazinās, palielinās strāvas stiprums tā tinumu pagriezienos, kas izraisa motora griezes momenta palielināšanos. Pie noteikta rotora ātruma tiek izveidots līdzsvars starp bremze un griezes momentu.
Slīdēšana un rotora ātrums
Apzīmē ar n 2 asinhronā motora rotora ātrums un cauri n 1 magnētiskā lauka rotācijas frekvence. Iepriekšējā sadaļā tas tika parādīts n 2 <n 1 .
Magnētiskā lauka rotācijas biežums attiecībā pret rotoru, t.i. atšķirība n 1 –n 2, zvanīja bīdāmās. Slīdēšanu parasti izsaka lauka rotācijas frekvences daļās un apzīmē ar simbolu s:
s = (n 1 – n 2)/ n 1 .
Slīdēšana ir atkarīga no slodzes uz motora vārpstu. Pie nominālās slodzes tā vērtība ir aptuveni 0,05 mazām mašīnām un aptuveni 0,02 jaudīgiem dzinējiem.
No iepriekš minētās vienlīdzības mēs varam viegli atrast sakarību: n 2 =n 1 (1 –s). Un pēc vienkāršas pārveidošanas mēs iegūstam dzinēja frekvences izteiksmi, kas ir ērta turpmākai argumentācijai: n 2 = 60f 1 (1 ‑s)/lpp.
Tā kā normālas motora darbības laikā slīdēšana ir maza, motora ātrums maz atšķiras no lauka ātruma.
Praksē slīdēšanu bieži izsaka procentos:
b = 100 (n 1 – n 2)/ n 1 .
Lielākajai daļai asinhrono motoru slīdēšana ir 2-6% robežās.
Slīdēšana ir viena no svarīgākajām dzinēja īpašībām; Caur to tiek izteikta EMF un rotora strāva, griezes moments, rotora ātrums.
Stacionārā stāvoklī ( n 2 = 0) rotoru s= 1. Motoram iedarbināšanas brīdī ir tāda slīdēšana.
Kā jau minēts, slīdēšana ir atkarīga no motora vārpstas slodzes brīža; līdz ar to arī rotora ātrums ir atkarīgs no vārpstas bremzēšanas momenta. Nominālais rotora ātrums n 2,nom, kas atbilst aprēķinātajai slodzes vērtībai M n, frekvence f 1,nom un tīkla spriegums U 1,nom, ir norādīts uz datu plāksnītes, kas pievienota asinhronā motora korpusam.
Indukcijas motora ātrums
n \u003d n 1 (1–s) \u003d (60f 1/p) (1 s) (85)
No šīs izteiksmes var redzēt, ka to var pielāgot, mainot frekvenci f1 barošanas spriegums, stabu pāru skaits R un
slīdēt s. Pēdējo var mainīt ar dotajām momenta vērtībām uz vārpstas M ext un frekvenci f 1, iekļaujot rotora tinuma ķēdē reostatu.
Regulēšana, mainot barošanas sprieguma frekvenci.Šai metodei nepieciešams frekvences pārveidotājs, kuram jāpievieno asinhronais motors. Pamatojoties uz vadāmiem pusvadītāju vārstiem (tiristoriem), ir izveidoti statiskie frekvences pārveidotāji un uzbūvētas vairākas eksperimentālas elektrolokomotīves un dīzeļlokomotīves ar asinhronajiem dzinējiem, kuru rotācijas ātrumu regulē, mainot barošanas sprieguma frekvenci. Šī indukcijas motora rotora ātruma regulēšanas metode ir ļoti daudzsološa.
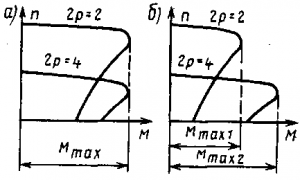
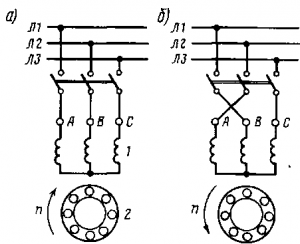
Regulēšana, mainot polu pāru skaitu.Šī metode ļauj iegūt pakāpeniskas ātruma izmaiņas. Šim nolūkam atsevišķas spoles 1, 2 un 3, 4, kas veido vienu fāzi (266. att.), tiek pārslēgtas tā, lai tajās attiecīgi mainītos strāvas virziens (piemēram, no līdzskaņu seriālā savienojuma uz pretēju) . Ar spoļu līdzskaņu iekļaušanu (266. att., a) polu skaits ir četri, ar pretēju iekļaušanu (266. att., b) - divi. Pārējo divu fāžu spoles, kas telpā nobīdītas par 120 °, ir savienotas tādā pašā veidā. Tādu pašu polu skaita samazinājumu var panākt, pārslēdzot spoles no virknes uz paralēlo savienojumu. Mainoties polu skaitam, mainās motora magnētiskā lauka griešanās ātrums n 1 un līdz ar to arī tā rotora griešanās ātrums n. Ja jums ir jābūt trim vai četriem ātrumiem n 1, tad statoram tiek uzlikts vēl viens tinums, kuru pārslēdzot var iegūt vēl divas frekvences. Ir dzinēji, kas nodrošina ātruma maiņu n 1 pie nemainīga maksimālā griezes momenta vai aptuveni pie nemainīgas jaudas (267. att.).
Asinhronajā motorā rotora polu skaitam jābūt vienādam ar statora polu skaitu. Vāveres rotorā šis nosacījums tiek izpildīts automātiski un, pārslēdzot statora tinumu, nav nepieciešamas nekādas izmaiņas rotora tinumā.

Motorā ar fāzes rotoru šajā gadījumā būtu jāmaina rotora tinuma polu skaits, kas ievērojami sarežģītu tā konstrukciju, tāpēc šī ātruma regulēšanas metode tiek izmantota tikai motoros ar vāveres rotoru . Šādiem motoriem ir lieli izmēri un svars, salīdzinot ar vispārējas nozīmes motoriem, un līdz ar to arī augstākas izmaksas. Turklāt regulēšana tiek veikta lielos soļos; pie frekvences f 1 = 50 Hz, lauka rotācijas frekvence n 1 pārslēgšanas laikā mainās attiecībā 3000:1500:1000:750.
Regulēšana, iekļaujot reostatu rotora ķēdē. Kad rotora tinumu ķēdē tiek iekļauts reostats ar dažādām pretestībām (R p4, R pZ, R p2 utt.), mēs iegūstam vairākus dzinēja reostatiskos mehāniskos raksturlielumus 4, 3 un 2. Šajā gadījumā noteikts slodzes moments M nom (268. att.) atbildīs mazākiem apgriezieniem n 4, n 3, n 2 utt., nekā frekvence n e, kad motors darbojas ar dabisko raksturlielumu 1 (pie R p = 0). Šo vadības metodi var izmantot tikai motoriem ar slīdgredzeniem. Tas ļauj vienmērīgi mainīt ātrumu plašā diapazonā. Tā trūkumi ir lieli enerģijas zudumi regulēšanas reostatā, tādēļ to izmanto tikai īslaicīgiem dzinēja darbības režīmiem (palaišanas laikā utt.).
Rotācijas virziena maiņa. Lai mainītu motora griešanās virzienu, ir jāmaina statora tinumu radītā magnētiskā lauka griešanās virziens. To panāk, mainot strāvas maiņas secību statora tinuma fāzēs. Piemēram, ja maksimālās strāvas nonāk statora tinuma 1 fāzēs (269. att., a) šādā secībā: fāze A - fāze B - fāze C, tad dzinēja rotors 2 griezīsies pulksteņrādītāja virzienā. Ja tomēr tie tiek baroti šādā secībā: fāze B - fāze A - fāze C, tad rotors sāks griezties pretēji pulksteņrādītāja virzienam. Šim nolūkam ir jāmaina statora tinumu savienojuma shēma ar tīklu, pārslēdzot jebkuras divas fāzes (vadus). Piemēram, statora tinuma spaile A, kas iepriekš bija savienota ar lineāro vadu L1, ir jāpārslēdz uz vadu L2, un šī tinuma spaile B, kas iepriekš savienota ar L2, ir jāpārslēdz uz vadu L1 (269. att. b). Šādu pārslēgšanu var veikt ar parasto slēdzi.
Elektromotori. Asinhronie motori
Asinhronie motori sauc par elektriskām mašīnām, kurām ir vismaz divi tinumi, kuros mainīgie spriegumi ir fāzēti nobīdīti viens pret otru.
Darbības princips
Asinhronajās sistēmās kļūst iespējams izveidot rotējošu magnētisko lauku mehāniski stacionārā ierīcē. Spole, kas savienota ar maiņstrāvas avotu, rada pulsējošu magnētisko lauku, tas ir, magnētisko lauku, kura vērtība un virziens mainās.
Rīsi. 16.6. Motora spoļu pievienošana trīsfāzu sprieguma avotam
Rīsi. 16.7. Trīsfāzu sistēmas strāvu izmaiņu grafiks
Cilindrā ar iekšējo diametru D uz virsmas ir novietotas trīs spoles, kas telpiski ir nobīdītas viena pret otru par 120°. Spoles ir savienotas ar trīsfāzu sprieguma avotu (16.6. Attēls). Uz att. 16.7 parāda momentāno strāvu grafiku, kas veido trīsfāžu sistēmu.
Katra no spolēm rada pulsējošu magnētisko lauku. Spoļu magnētiskie lauki, mijiedarbojoties viens ar otru, veido iegūto rotējošo magnētisko lauku, ko raksturo iegūtās magnētiskās indukcijas vektors.
Uz att. 16.8 parāda katras fāzes magnētiskās indukcijas vektorus un iegūto vektoru, kas izveidots trīs reizes t 1, t 2, t 3. Spoļu asu pozitīvie virzieni ir atzīmēti ar +1, +2, +3.
Šobrīd t \u003d t 1 strāva un magnētiskā indukcija A-X spolē ir pozitīva un maksimālā, B-Y un C-Z spolēs tās ir vienādas un negatīvas. Iegūtās magnētiskās indukcijas vektors ir vienāds ar spoļu magnētisko indukcijas vektoru ģeometrisko summu un sakrīt ar spoles asi A-X. Šobrīd t \u003d t 2 strāvas spoles A-X un C-Z ir vienādas pēc lieluma un pretējā virzienā. Strāva B fāzē ir nulle. Iegūtais magnētiskās indukcijas vektors pagriezās pulksteņrādītāja virzienā par 30°.
Rīsi. 16.8. Magnētiskās indukcijas vektori trīs laika momentiem
Šobrīd t \u003d t 3 strāvas spoles A-X un B-Y ir vienāda lieluma un pozitīvas, strāva C-Z fāzē ir maksimāla un negatīva, iegūtā magnētiskā lauka vektors atrodas negatīvā virzienā. C-Z spoles ass. Maiņstrāvas periodā iegūtā magnētiskā lauka vektors pagriezīsies par 360°. Magnētiskās indukcijas vektora kustības lineārais ātrums
kur ir maiņstrāvas frekvence; T ir sinusoidālās strāvas periods; pg - magnētiskā lauka rotācijas frekvence vai sinhronā rotācijas frekvence. Periodā T magnētiskais lauks pārvieto attālumu, kur
Polu dalījums vai attālums starp magnētiskā lauka poliem
lauks pa cilindra ar diametru D apkārtmēru.
Lineārais ātrums no
kur n 1 - daudzpolu magnētiskā lauka sinhronā rotācijas frekvence ar polu pāru skaitu R.
Spoles, kas parādītas attēlā. 16.6, izveidot bipolāru magnētisko lauku, ar polu skaitu 2P = 2. Lauka rotācijas frekvence ir 3000 apgr./min. Lai iegūtu četru polu magnētisko lauku, cilindrā ar diametru D jāievieto sešas spoles, pa divām katrai fāzei. Tad saskaņā ar formulu (16.7) magnētiskais lauks griezīsies divreiz lēnāk, ar n 1 = 1500 apgr./min.
Lai iegūtu rotējošu magnētisko lauku, ir jāievēro divi nosacījumi:
- Nosacījums 1 – jābūt vismaz divām telpiski pārvietotām spoles.
- 2. nosacījums – pievienojiet spolēm ārpusfāzes strāvas.
Dizains
Asinhronajam motoram ir fiksēta daļa, ko sauc par statoru, un rotējoša daļa, ko sauc par rotoru. Statorā ir tinums, kas rada rotējošu magnētisko lauku. Ir asinhronie motori ar vāveres sprostu un fāzes rotoru. Rotora rievās ar īsslēgts tinums novietoti alumīnija vai vara stieņi. Galos stieņi ir noslēgti ar alumīnija vai vara gredzeniem. Stators un rotors ir izgatavoti no elektriskā tērauda loksnēm, lai samazinātu virpuļstrāvas zudumus. Fāzes rotoram ir trīsfāzu tinums (par trīsfāzu motors). Fāžu gali ir savienoti kopējā mezglā, un sākumi tiek izvadīti uz trim kontaktgredzeniem, kas novietoti uz vārpstas. Uz gredzeniem tiek uzliktas fiksēto kontaktu birstes. Ar sukām ir pievienots palaišanas reostats. Pēc dzinēja iedarbināšanas palaišanas reostata pretestība pakāpeniski tiek samazināta līdz nullei.
Asinhronā motora darbības princips
Asinhronā motora darbības princips tiks apskatīts attēlā parādītajā modelī. 16.9.
Statora rotējošo magnētisko lauku attēlojam kā pastāvīgo magnētu, kas rotē ar sinhrono rotācijas frekvenci u. Rotora slēgtā tinuma vadītājos tiek inducētas strāvas. Magnēta stabi pārvietojas pulksteņrādītāja virzienā. Novērotājam, kas novietots uz rotējoša magnēta, šķiet, ka magnēts ir nekustīgs, un vadītāji rotācijas tinums pārvietot pretēji pulksteņrādītāja virzienam. Rotora strāvu virzieni, kas noteikti pēc labās rokas likuma, ir parādīti attēlā. 16.9.

Rīsi. 16.9. Indukcijas motora modelis
Izmantojot kreisās rokas likumu, mēs atrodam elektromagnētisko spēku virzienu, kas iedarbojas uz rotoru un liek tam griezties. Motora rotors griezīsies ar ātrumu n 1 statora lauka rotācijas virzienā. Rotors griežas asinhroni, t.i., tā rotācijas frekvence n 2 ir mazāka par statora lauka griešanās frekvenci w. Relatīvo atšķirību starp statora un rotora lauka ātrumu sauc par slīdēšanu:
Slīde nevar būt vienāda ar nulli, jo pie vienādiem lauka un rotora ātrumiem strāvu indukcija rotorā apstātos un līdz ar to nebūtu elektromagnētiskā griezes momenta.
Rotējošais elektromagnētiskais griezes moments tiek līdzsvarots ar pretējo bremzēšanas momentu.Palielinoties slodzei uz motora vārpstu, bremzēšanas griezes moments kļūst lielāks par rotējošo griezes momentu, un palielinās slīdēšana. Tā rezultātā palielinās EML un strāvas, kas inducētas rotora tinumā. Griezes moments palielinās un kļūst vienāds ar bremzēšanas momentu. Griezes moments var palielināties, palielinoties slīdēšanai, līdz noteiktai maksimālajai vērtībai, pēc kuras, vēl vairāk palielinot bremzēšanas griezes momentu, griezes moments strauji samazinās un motors apstājas.
Ja apstājusies motora slīdēšana ir vienāda ar vienu, tad tiek uzskatīts, ka motors atrodas īssavienojuma režīmā. Nenoslodzes asinhronā motora griešanās ātrums n 2 ir aptuveni vienāds ar sinhrono frekvenci n 1 .
Ja nenoslogota dzinēja slīdēšana ir S = 0, tad tiek uzskatīts, ka dzinējs darbojas tukšgaitā.
Asinhronās mašīnas slīdēšana, kas darbojas motora režīmā, svārstās no nulles līdz vienam. Asinhronā mašīna var darboties ģeneratora režīmā. Lai to izdarītu, tā rotoru jāgriež ar trešās puses motoru statora magnētiskā lauka griešanās virzienā ar frekvenci n 2 > n 1. Paslīdēt asinhronais ģenerators S< 0.
Asinhronā mašīna var darboties elektriskās mašīnas bremzes režīmā. Lai to izdarītu, ir nepieciešams pagriezt tā rotoru virzienā, kas ir pretējs statora magnētiskā lauka griešanās virzienam. Šajā režīmā S > 1.
Parasti asinhronās mašīnas tiek izmantotas motora režīmā. Indukcijas motors ir visizplatītākais motoru veids nozarē. Lauka rotācijas biežums asinhronajā motorā ir stingri saistīts ar tīkla frekvenci f 1 un statora polu pāru skaitu.
Pie frekvences f 1 = 50 Hz ir sekojošais ātruma diapazons(P - n 1, apgr./min.):
No formulas (16.7) iegūstam
Statora lauka ātrumu attiecībā pret rotoru sauc par slīdēšanas ātrumu
![]()
Strāvas frekvence un EML rotora tinumā

Asinhronā mašīna ar bloķētu rotoru darbojas kā transformators. Galvenā magnētiskā plūsma statorā un fiksētajos rotora tinumos inducē EMF E 1 un E 2K:

kur Ф m - galvenās magnētiskās plūsmas maksimālā vērtība, kas savienota ar statora un rotora tinumiem; W 1 un W 2 - statora un rotora tinumu apgriezienu skaits; - sprieguma frekvence tīklā; K 01 un K 02 - statora un rotora tinumu tinumu koeficienti.
Lai panāktu labvēlīgāku magnētiskās indukcijas sadalījumu gaisa spraugā starp statoru un rotoru, statora un rotora tinumi netiek koncentrēti viena pola ietvaros, bet gan sadalīti pa statora un rotora apkārtmēriem. Izkliedētā tinuma EMF ir mazāks par viengabala tinuma EMF. Šis fakts tiek ņemts vērā, ieviešot tinumu koeficientus formulās, kas nosaka tinumu elektromotora spēku lielumu. Tinumu koeficientu vērtības ir nedaudz mazākas par vienotību. EMF rotējoša rotora tinumā
Darbojošās mašīnas rotora strāva
kur R2 - aktīvā pretestība rotora tinums; x 2 - rotora tinuma induktīvā pretestība,
Kur x 2K ir bloķētā rotora induktīvā pretestība. Tad
Vienfāzes motoram ir viens tinums, kas atrodas uz statora. Vienfāzes tinums, darbināms maiņstrāva, radīs pulsējošu magnētisko lauku. Novietosim šajā laukā rotoru ar īsslēgtu tinumu. Rotors negriezīsies. Ja griežat rotoru ar trešās puses mehānisku spēku jebkurā virzienā, dzinējs darbosies stabili. To var izskaidrot šādi.
Pulsējošo magnētisko lauku var aizstāt ar diviem magnētiskie lauki, kas rotē pretējos virzienos ar sinhrono frekvenci n1 un kuru magnētisko plūsmu amplitūdas ir vienādas ar pusi no pulsējošā lauka magnētiskās plūsmas amplitūdas. Vienu no magnētiskajiem laukiem sauc par uz priekšu rotējošu, otru par griežošu. Katrs no magnētiskajiem laukiem rotora tinumā izraisa virpuļstrāvas. Kad virpuļstrāvas mijiedarbojas ar magnētiskajiem laukiem, veidojas griezes momenti, kas ir vērsti viens pret otru. Uz att. 16.10 parāda momenta atkarības no tiešā lauka M ", momenta no apgrieztā lauka M" un iegūtā momenta M slīdēšanas funkcijā M \u003d M "- M ".
Rīsi. 16.10. Tiešā lauka, apgrieztā lauka un no tā izrietošā momenta atkarība no slīdēšanas
Bīdāmās asis ir vērstas pretī viena otrai. Iedarbināšanas režīmā rotoru pakļauj griezes momentiem, kas ir vienādi pēc lieluma un pretēji virzienam. Ļaujiet mums griezt rotoru ar trešās puses spēku abpusēja magnētiskā lauka virzienā. Parādīsies pārmērīgs (iegūtais) griezes moments, paātrinot rotoru līdz ātrumam, kas ir tuvu sinhronam. Šajā gadījumā motora slīdēšana attiecībā pret magnētisko lauku
![]()
Motora slīdēšana attiecībā pret apgriezti rotējošu magnētisko lauku
Ņemot vērā iegūto raksturlielumu, mēs varam izdarīt šādus secinājumus.
1. secinājums. Vienfāzes motoram nav sākuma griezes moments. Tas griezīsies virzienā, kurā to griež ārējs spēks.
2. secinājums. Sakarā ar apgrieztā rotējošā lauka bremzēšanas darbību vienfāzes motora veiktspēja ir sliktāka nekā trīsfāžu motoram.
Lai izveidotu sākuma brīdi vienfāzes motori piegādāt ar starta tinumu, kas ir telpiski pārvietots attiecībā pret galveno, darba tinums 90°. Sākuma tinums ir savienots ar tīklu, izmantojot fāzes nobīdes elementus: kondensatoru vai aktīvo pretestību.
16.11. attēlā parādīta motora tinuma pārslēgšanas ķēde, kur P ir darba tinums, P ir sākuma tinums. Fāzes nobīdes elementa C kapacitāte ir izvēlēta tā, lai strāvas darba un palaišanas tinumos fāzē atšķirtos par 90 °. Trīsfāzu asinhrono motoru var darbināt no vienfāzes tīkls ja savienojat tā tinumus saskaņā ar sekojošām shēmām (16.12. att.).
Diagrammā, kas parādīta attēlā. 16.12, un statora tinumi ir savienoti ar zvaigzni, un diagrammā attēlā. 16.12, b - trīsstūris. Kapacitātes vērtība C ~ 60 uF uz 1 kW jaudas.
Rīsi. 16.11. Vienfāzes motora tinumu ieslēgšanas shēma
Rīsi. 16.12. Shēmas trīsfāzu motora tinumu ieslēgšanai vienai fāzei: a - pirmā iespēja; b - otrā iespēja