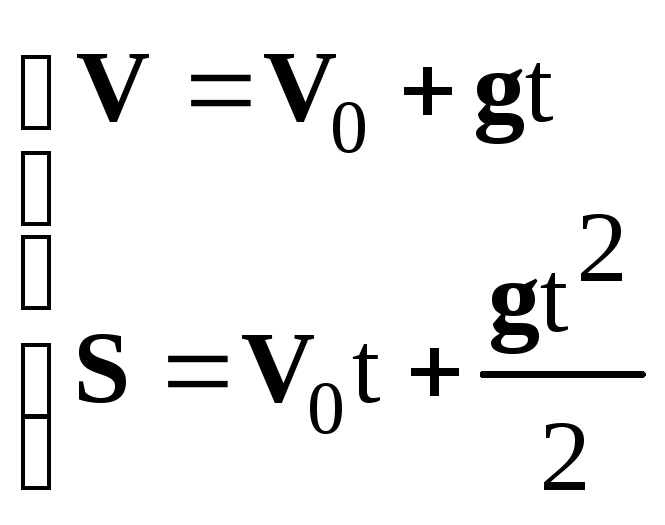
เราเลือกระบบพิกัดสองมิติ X,Y และจับคู่ที่มากับตำแหน่งของกระสุนปืนก่อนทำการยิง ให้เราพรรณนาวิถีของโพรเจกไทล์ด้วยเส้นโค้ง OB และถือว่าโพรเจกไทล์อยู่ที่จุด B หลังจากบินไป 3 วินาที เนื่องจากการเคลื่อนที่ของโพรเจกไทล์เกิดขึ้นด้วยความเร่งคงที่ gรายงานโดยแรงโน้มถ่วงและความเร็วเริ่มต้นของกระสุนปืน วี 0 ไม่เท่ากับศูนย์ ดังนั้นกฎของจลนศาสตร์ควรเขียนดังนี้:
 ,
(1)
,
(1)
ในการฉายภาพบนแกนพิกัด สมการ (1) มีรูปแบบดังนี้
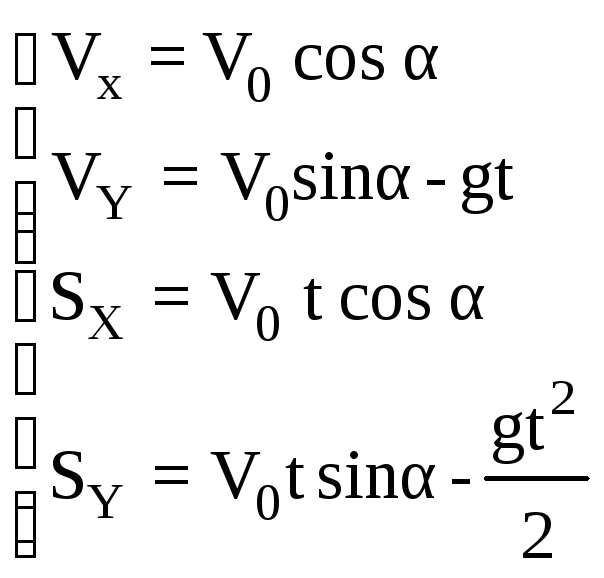
ค่า V 0 cosα; และ V 0 sinα เท่ากับเส้นโครงของความเร็วเริ่มต้นบนแกน X และ Y ตามลำดับ จากมุมฉากของเส้นโครง V x และ V y เป็นดังนี้:
จากภาพวาดจะเห็นได้ว่าเส้นโครงของเวกเตอร์การกระจัด สบนแกนพิกัดเท่ากับแนวนอน L และแนวตั้ง H การเคลื่อนที่ของกระสุนปืน: S X \u003d L และ S Y \u003d H ดังนั้น
 (3)
(3)
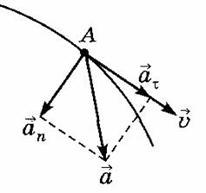
การขยายความเร่งของโพรเจกไทล์ gที่จุด B บนทิศทางของเส้นสัมผัสและเส้นตั้งฉากกับเส้นโคจร เราสังเกตว่ามันปกติ เอ H และแทนเจนต์ เอส่วนประกอบ τ สังเกตได้จากการวาดภาพว่า
ан = g sinβ, α τ = g cosβ, (5)
β คือมุมระหว่างแนวตั้งกับเส้นตั้งฉากกับวิถีโคจรที่จุด B มีมุมเท่ากัน ในรูปสี่เหลี่ยมด้านขนานของความเร็วและความเร่ง (เป็นมุมที่มีด้านตั้งฉาก)
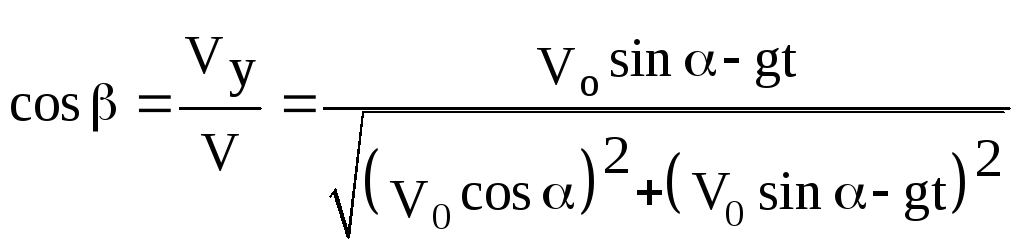
ฟังก์ชันตรีโกณมิติของมุม β สามารถพบได้จากการขยายตัวของความเร็วของกระสุนปืนที่จุด B:
 ,
,
 .
.
แทนค่าความสัมพันธ์ (5) นิพจน์สำหรับฟังก์ชันตรีโกณมิติ ในที่สุด เราก็มี:
 ,
,
 .
.
การกระจัดในแนวนอนของโพรเจกไทล์และความสูงนั้นหาได้จากสูตร (3) และ (4):
 ,
,
 ,หลี่
,หลี่  .
.
เมื่อใช้ความสัมพันธ์ (2) เราจะหาค่าความเร็วของกระสุนปืนหลังจากบินสามวินาที:
ความคิดเห็น ค่าลบของ α τ ที่วินาทีที่สามของการบินแสดงให้เห็นว่าในขณะนี้ความเร็วของโพรเจกไทล์ลดลงนั่นคือมันยังคงอยู่บนกิ่งก้านขึ้นของพาราโบลาเช่นที่จุด B
ตัวอย่าง 1.2ดิสก์ที่มีรัศมี R= 10 ซม. หยุดนิ่ง จากนั้นดิสก์ก็เริ่มหมุนด้วยความเร่งเชิงมุมคงที่ =0.5 rad/s 2 จงหาความเร่งในแนวสัมผัส ปกติ และความเร่งรวมของจุดบนเส้นรอบวงของดิสก์เมื่อสิ้นสุดวินาทีที่สองหลังจากเริ่มการหมุน ตลอดจนมุมที่ประกอบเป็นเวกเตอร์ของการเร่งรวมของจุดใดๆ ของดิสก์ด้วย รัศมี.
เอ ชม =?, เอ =?, ก=?, =?
R=10cm=0.1m
|
|
ให้เราขยายเวกเตอร์ความเร่งทั้งหมด เอคะแนนต่อการเร่งความเร็วในแนวสัมผัส α τ และ อัตราเร่งปกติเอน ( นเป็นเวกเตอร์ตั้งฉากด้านนอกของวิถี):
 .
.
จากรูปแสดงว่า tgα= α τ /α n โดยใช้ความสัมพันธ์ระหว่างการเร่งความเร็วเชิงเส้นและเชิงมุม เราสามารถเขียนได้
เป็นที่ทราบกันดีอยู่แล้วว่าความเร่งปกติถูกกำหนดโดยสูตร:
 ,
,
ที่ไหน ความเร็วเชิงมุมถูกกำหนดจากสมการพื้นฐานของจลนศาสตร์ของการเคลื่อนที่แบบหมุน
 .
.
โดยเงื่อนไข 0 = 0 แล้ว  .
.
เพราะเหตุนี้,
และ H \u003d β 2 t 2 R.
การคำนวณเราได้รับ:
α τ \u003d 0.510 -1 \u003d 510 -2 (m / s 2); และ n \u003d 25 10 -2 4 10 -2 \u003d 10 -2 (m / s 2)
 (m/s 2);
(m/s 2);  ,α=79°
,α=79°
กลศาสตร์- ส่วนหนึ่งของฟิสิกส์ที่ศึกษารูปแบบการเคลื่อนที่ของสสารที่ธรรมดาและเรียบง่ายที่สุดรูปแบบหนึ่ง เรียกว่า การเคลื่อนที่เชิงกล
การเคลื่อนไหวทางกลคือการเปลี่ยนแปลงตำแหน่งของร่างกายหนึ่งเมื่อเทียบกับอีกร่างหนึ่งซึ่งถือเป็นสิ่งที่ไม่สามารถเคลื่อนย้ายได้เมื่อเวลาผ่านไป
ให้ตัวอย่างขน ความเคลื่อนไหว.
การเคลื่อนที่ของสสารมักปรากฏอยู่ในรูปแบบอื่นๆ ที่ซับซ้อนกว่าของการเคลื่อนที่ของสสารในฐานะที่เป็นอินทิกรัลแต่ไม่ใช่ส่วนที่ละเอียดถี่ถ้วน
กฎของกลศาสตร์คลาสสิกและผลที่ตามมาทั้งหมดมีผลกับการเคลื่อนไหวเท่านั้น มาโครบอดี,เคลื่อนที่ด้วยความเร็วต่ำเมื่อเทียบกับความเร็วแสงในสุญญากาศ ข้อจำกัดของกลไกแบบคลาสสิกอธิบายได้จากข้อเท็จจริงที่ว่ามันถูกสร้างขึ้นบนพื้นฐานของการศึกษามาโครโมชันด้วยความเร็วต่ำ กลศาสตร์ควอนตัมศึกษาการเคลื่อนที่ของจุลชีพ กลศาสตร์สัมพัทธภาพ - การเคลื่อนที่ของวัตถุด้วยความเร็วสูง
งานหลักของกลศาสตร์คือการรู้ ปฏิสัมพันธ์ของร่างกายที่กำลังศึกษาการเคลื่อนไหวกับร่างกายอื่นๆ รวมทั้ง ตำแหน่งของเขาและ สถานะการเคลื่อนไหวในช่วงเวลาเริ่มต้น ให้กำหนดว่าตำแหน่งของร่างกายนี้เปลี่ยนแปลงอย่างไรเมื่อเวลาผ่านไป กล่าวคือ กำหนดตำแหน่งของร่างกายในอวกาศได้ตลอดเวลา
การเคลื่อนที่เชิงกลของร่างกายจะทราบได้หากทราบการเคลื่อนที่ของอนุภาคทั้งหมด ดังนั้นก่อนอื่นจึงจำเป็นต้องศึกษาการเคลื่อนไหวของสิ่งที่เรียกว่า จุดวัสดุ- ร่างกายที่มีมวล จำกัด แต่มีขนาดเล็กเล็กน้อย ไม่มีจุดวัสดุที่แท้จริงในธรรมชาติ แนวคิดของประเด็นที่เป็นนามธรรมคือนามธรรมทางวิทยาศาสตร์ แนะนำแนวคิดนี้ เราสรุปคุณสมบัติทั้งหมดของร่างกายที่ไม่จำเป็นสำหรับการเคลื่อนไหวที่กำหนด เช่น ขนาด โครงสร้าง การเปลี่ยนแปลงโครงสร้างภายใน
ดังนั้น ร่างกายใดๆ ถือเป็นจุดที่มีนัยสำคัญ ถ้า ประการแรกระยะทางที่เดินทางนั้นยอดเยี่ยมเมื่อเทียบกับขนาดและ ประการที่สองหากรูปร่างและขนาดของร่างกายไม่มีผลกระทบอย่างมีนัยสำคัญต่อธรรมชาติของการเคลื่อนไหวโดยรวม
การแนะนำแนวคิด จุดวัสดุกลายเป็นว่ามีประโยชน์มากเมื่อพิจารณาร่างกายที่ขยายออกไป ในกรณีนี้ร่างกายที่ขยายออกจะถูกแบ่งออกเป็นส่วนต่าง ๆ ทางจิตใจซึ่งการเคลื่อนไหวถือได้ว่าเป็นการเคลื่อนไหวของจุดวัสดุ เมื่อทราบความเคลื่อนไหวของประเด็นสำคัญเหล่านี้ เราจะทราบความเคลื่อนไหวของผลรวมทั้งหมดด้วย นั่นคือ ร่างกายขยายถือเป็นระบบของจุดวัสดุ
ตำแหน่งของวัตถุเคลื่อนที่ในอวกาศสามารถกำหนดได้เฉพาะกับวัตถุอื่นที่เรียกว่า เนื้อหาอ้างอิง,ซึ่งถือว่าอยู่นิ่ง การกำหนดตำแหน่งของจุดหรือร่างกาย "สัมพันธ์กับพื้นที่ว่าง" เป็นไปไม่ได้และไม่มีความหมายทางร่างกาย เชื่อมโยงกับหน่วยงานอ้างอิงตามอำเภอใจ ระบบพิกัดเราจะได้ ระบบอ้างอิงตำแหน่งของจุดวัสดุ ระบบอ้างอิงจะต้อง หมดเวลา, เช่น. ติดตั้ง "นาฬิกา" ด้วยความช่วยเหลือของจุดในเวลาที่กำหนดอย่างเฉพาะเจาะจง
ระบบอ้างอิงที่ง่ายที่สุด yavl ระบบพิกัดสี่เหลี่ยม OXYZ (คาร์ทีเซียน), รูปที่. 1. ตำแหน่งของจุด M ในระบบพิกัดนี้มีสามพิกัด: X, Y, Z
รูปที่ 1 ระบบพิกัดสี่เหลี่ยม
ระบบพิกัดทรงกลม:ม(ร,,).
มีระบบพิกัดอื่น ๆ : ทรงกระบอก ขั้ว
ในทุกกรณี ด้วยตัวเลือกของระบบอ้างอิงที่แตกต่างกัน รัศมีเวกเตอร์ r (วิธีการอธิบายเวกเตอร์) และตำแหน่งของจุดในอวกาศ (วิธีพิกัด) จะถูกกำหนดลักษณะเชิงปริมาณด้วยตัวเลขสามตัวที่สามารถแปรผันอย่างเป็นอิสระจากกัน นี่คือภาพสะท้อนทางคณิตศาสตร์ของความจริงที่ว่า พื้นที่เป็นสามมิติ
ถ้าร่างกายไม่ได้รับผลกระทบจากร่างกายอื่น เรียกว่า ร่างกายเคลื่อนไหวได้อย่างอิสระ
หากเราเลือกระบบที่เกี่ยวข้องกับวัตถุที่เคลื่อนที่อย่างอิสระเป็นระบบอ้างอิง ในระบบดังกล่าว การเคลื่อนที่อิสระของวัตถุอื่นๆ จะเกิดขึ้นเป็นเส้นตรงและสม่ำเสมอ (ด้วยความเร็วคงที่ในขนาดและทิศทาง) คำสั่งนี้เป็นเนื้อหา กฎความเฉื่อยค้นพบครั้งแรกโดยกาลิเลโอ กรอบอ้างอิงที่เกี่ยวข้องกับร่างกายที่เคลื่อนไหวอย่างอิสระเรียกว่า ระบบเฉื่อย อ้างอิง.กฎความเฉื่อยเรียกว่า อีกด้วย กฎข้อที่หนึ่งของนิวตัน
หากบางระบบเคลื่อนที่ตามระบบเฉื่อยด้วยความเร็วคงที่ (ในขนาดและทิศทาง) มันก็จะเฉื่อยเช่นกัน
ปรากฏการณ์ทางกายภาพทั้งหมดดำเนินไปในลักษณะเดียวกันในกรอบอ้างอิงเฉื่อยที่แตกต่างกัน ซึ่งทำให้ไม่สามารถแยกความแตกต่างทางกายภาพออกจากกันหรือเทียบเท่าได้ดังนั้นปรากฏการณ์ทางกายภาพทั้งหมดจึงถูกศึกษาในกรอบอ้างอิงเฉื่อย กฎหมายนี้เรียกว่า หลักการสัมพัทธภาพ
ที่พบมากที่สุดคือระบบอ้างอิงที่เกี่ยวข้องกับโลก ระบบนี้ไม่ใช่ yavl เฉื่อยเนื่องจากการหมุนของโลกรอบแกนและการเคลื่อนที่เป็นวงกลมรอบดวงอาทิตย์ในแต่ละวัน ความเร็วของการเคลื่อนที่ของโลกเหล่านี้ไม่เท่ากันและไม่คงที่ ดังนั้นระบบนี้จึงไม่เฉื่อย อย่างไรก็ตาม ในกรณีนี้ เราทำให้เกิดข้อผิดพลาดเล็กน้อย ซึ่งไม่มีนัยสำคัญสำหรับการทดลองทางกายภาพจำนวนหนึ่ง โดยใช้กรอบอ้างอิง "ภาคพื้นดิน" เป็นกรอบอ้างอิงเฉื่อย
เนื่องจากปริมาณทั้งสามที่ระบุตำแหน่งของจุดในอวกาศมีความเป็นอิสระซึ่งกันและกัน จึงกล่าวได้ว่าเสื่อ จุดมีสาม ระดับความอิสระ.(ให้คำจำกัดความของศิลปะ เสรีภาพ).
หากจุดวัสดุเคลื่อนที่ พิกัดของจุดนั้นจะเปลี่ยนไปตามกาลเวลา กล่าวคือ ค่า X,Y,Z และเวกเตอร์รัศมี r เป็นฟังก์ชันของเวลา:
ฟังก์ชันเวลาที่กำหนดพิกัดของจุดเคลื่อนที่ ณ เวลาใดก็ตามเรียกว่า kinematic กฎการเคลื่อนที่
อันที่จริง โดยการตั้งค่าช่วงเวลาหนึ่งหรืออีกช่วงเวลาหนึ่ง เป็นไปได้เสมอที่เป็นผลมาจากการแทนที่ค่าตัวเลขเฉพาะลงใน (1) เพื่อกำหนดพิกัดทั้งสามของจุดเคลื่อนที่ที่สอดคล้องกับช่วงเวลานี้ กล่าวคือ กำหนดว่าจะอยู่ที่ไหนในเวลาที่กำหนด ถ้า t = t 0 เราก็มี เงื่อนไขเบื้องต้น
การสร้างกฎจลนศาสตร์ของการเคลื่อนที่ของจุดวัสดุเป็นงานหลักของกลศาสตร์ของจุดวัสดุ เมื่อทราบแล้ว คุณสามารถกำหนดตำแหน่งของจุดเคลื่อนที่ในอวกาศได้ตลอดเวลา
ชุดของตำแหน่งที่ต่อเนื่องกันซึ่งครอบครองโดยจุด M ในกระบวนการเคลื่อนที่สร้างเส้นในช่องว่างที่เรียกว่า วิถี จุดเคลื่อนที่. กฎจลนศาสตร์ของการเคลื่อนที่ยังกำหนดวิถีของจุดเคลื่อนที่ด้วย
ถ้าเราแสดง t = f 1 (x) จากสมการแรกของระบบ (1) และแทนที่มันลงในสมการอีกสองสมการ เราจะได้:
Y = f 2 f 1 (x) = F(x);
Z \u003d f 3 f 1 (x) \u003d Ф (x) (2)
วิถีโคจรของจุดวัสดุเคลื่อนที่นั้นวิเคราะห์ได้จากสมการของแบบฟอร์ม (2)
ถ้าวิถีเป็นเส้นตรง การเคลื่อนที่จะเรียกว่า ตรงไปตรงมาการเคลื่อนไหวที่มีลักษณะเป็นวิถีโค้งเรียกว่า โค้งระยะทางที่วัดตามวิถีของวัตถุที่กำลังเคลื่อนที่ซึ่งผ่านไปในช่วงระยะเวลาหนึ่งเรียกว่า ความยาวเส้นทาง(หรือทาง). การเคลื่อนไหวที่ร่างกายเดินทางในระยะทางเท่ากันในช่วงเวลาเท่ากันโดยพลการเรียกว่า เครื่องแบบหากร่างกายเคลื่อนผ่านเส้นทางที่ต่างกันในช่วงเวลาเท่ากันสองช่วง การเคลื่อนไหวจะเป็น ไม่สม่ำเสมอ
การเคลื่อนไหวร่างกายที่แตกต่างกันในช่วงเวลาเดียวกันผ่านเส้นทางที่ไม่เท่ากัน ยิ่งร่างกายเดินทางนานเท่าใดในช่วงเวลาหนึ่ง ร่างกายก็จะยิ่งเคลื่อนที่เร็วขึ้นเท่านั้น สำหรับการประเมินเชิงปริมาณของความเร็วของการเคลื่อนไหวทางกล แนวคิดนี้ถูกนำมาใช้ ความเร็ว.ยิ่งร่างกายเคลื่อนไหวเร็วเท่าไหร่ก็ยิ่งมีความเร็วมากขึ้นเท่านั้น
ในกรณีของการเคลื่อนที่เป็นเส้นตรงสม่ำเสมอ ความเร็วจะเท่ากับอัตราส่วนของเส้นทางที่ร่างกายเดินทางต่อระยะเวลาที่เดินทาง นั่นคือ เท่ากับเส้นทางที่ร่างกายเดินทางต่อหน่วยเวลา
ถ้า t 1 S 1, t 2 S 2 แล้วสำหรับ t \u003d t 2 - t 1 ร่างกายไปทาง S \u003d S 2 -S 1
ดังนั้นความเร็ว
วี\u003d (S 2 - S 1) / (t 2 - t 1) \u003d S / t เช่น S t, a วี= คอนสตรัค (ในขนาด!)
พิจารณากรณีทั่วไปของการเคลื่อนที่โค้งที่ไม่สม่ำเสมอ ให้ในช่วงเวลา t วัตถุของจุดเคลื่อนที่อยู่ในตำแหน่ง M, รูปที่ 2, มีลักษณะเป็นเวกเตอร์รัศมี r หรือพิกัด X,Y,Z
รูปที่ 2 ระบบทรงกลม
เมื่อถึงเวลา เสื้อ 1 = เสื้อ + t ร่างกายจะเข้ารับตำแหน่ง M 1 มีลักษณะเป็น r 1 และ X 1 ,Y 1, Z 1 . ในช่วงเวลา t \u003d t 1 - t พิกัดของร่างกายเปลี่ยนเป็น X \u003d X 1 - X, Y \u003d Y 1 - Y, Z \u003d Z 1 - Z, a r \u003d r 1 -r. ในกรณีนี้ เส้นโครงของเวกเตอร์ r บนแกนพิกัดจะเท่ากันตามลำดับ: X = r cos(r,X);
Y = r cos(r,Y);
Z = r cos(r,Z);
r= Xi + Yj +Zk,
และขนาดของเวกเตอร์ r เท่ากับ
r = (X) 2 + (Y) 2 + (Z) 2 .
เวกเตอร์ r กำกับจากตำแหน่งเริ่มต้นไปยังตำแหน่งสุดท้ายของวัตถุจุดที่เคลื่อนที่ในช่วงเวลา t เรียกว่า เวกเตอร์การกระจัดในกรณีทั่วไปของการเคลื่อนที่แบบโค้งของร่างกาย เวกเตอร์การกระจัดไม่ตรงกับส่วนของวิถีโคจรที่ร่างกายสำรวจเพื่อการตอบสนอง ช่วงระยะเวลาหนึ่ง กล่าวคือ เวกเตอร์ r คือส่วนของเส้นตรงที่มีทิศทาง และส่วนที่สอดคล้องกันของวิถีสามารถเป็นเส้นโค้งได้
ค่า วี = r/ t เท่ากับการเปลี่ยนแปลงเฉลี่ยในเวกเตอร์รัศมีของวัสดุที่เคลื่อนที่ คะแนนต่อหน่วยเวลา naz ความเร็วเฉลี่ยของการเคลื่อนไหวด้วยการเคลื่อนที่เป็นเส้นตรงสม่ำเสมอ ค่านี้จะเท่ากับความเร็วในช่วงเวลาใดๆ อย่างชัดเจน ซึ่งเป็นค่าคงที่ที่ไม่ขึ้นอยู่กับการเลือกช่วงเวลาของเวลา t หรือค่าของช่วงเวลา t
ที่ กรณีการเคลื่อนไหวไม่เท่ากันเมื่อมีการเปลี่ยนแปลงใน t อัตราส่วน r/t จะเปลี่ยนไป กล่าวคือ r/t = ฉ(t). ซึ่งหมายความว่าความเร็วเฉลี่ยจะไม่เท่ากันสำหรับความยาวของส่วนต่างๆ t ที่อยู่ติดกับจุดในเวลา t ที่เราสนใจ ดังนั้นจึงเป็นไปไม่ได้ที่จะอธิบายลักษณะการเคลื่อนที่ ณ จุดที่กำหนดในเวลาอย่างชัดเจนด้วยความช่วยเหลือ
เมื่อผ่านถึงขีด จำกัด สำหรับช่วงเวลาเล็ก ๆ อย่างอนันต์ (t0) เราจะได้เวกเตอร์ จริง,หรือ ความเร็วทันทีที่จุด M 1 .
วี= ลิม วี= ลิม r/t = dr/dt
t t
เนื่องจากเซแคนต์ในลิมิตเกิดขึ้นพร้อมกับแทนเจนต์ ดังนั้นเวกเตอร์ความเร็ว วีมุ่งตรงไปยังเส้นทาง แล้วโดยไม่คำนึงถึงทิศทาง
วี = วี= lim r t = lim St = dS/dt
Lim r/t เป็นอนุพันธ์ของ r เทียบกับ t และเขียนแทนด้วย dr/dt.t
ขีดจำกัดนี้จะเป็นความเร็วของจุดเคลื่อนที่ ณ เวลาที่กำหนด อย่างไรก็ตาม ขนาดและทิศทางอาจแตกต่างกันในแต่ละช่วงเวลา
เวกเตอร์ความเร็วมีเส้นโครงบนแกนพิกัดเท่ากับ วี x , วี Y , วี z และสามารถเขียนได้
V = dr/dt = V x i + V y j + V z k,
โดยที่ V x = dX/dt, V y = dY/dt, V z = dZ/dt
ค่าเวกเตอร์ วี เท่ากับ
V \u003d V x 2 + V y 2 + V z 2 \u003d (dX / dt) 2 + (dY / dt) 2 + (dZ / dt) 2
มาเขียนสูตรเกี่ยวกับค่าความเร็วกัน วี และ วี จุดวัสดุเดียวกันในระบบอ้างอิงที่แตกต่างกันสองระบบ K และ K
วี = วี + วี,
ที่ไหน วี – ความเร็วของระบบ K เทียบกับระบบ ถึง.
สูตรนี้เกี่ยวข้องกับความเร็วของอนุภาควัสดุเดียวกันในกรอบอ้างอิงต่างๆ เรียกว่า กฎการเพิ่มความเร็วกฎนี้เป็นจริงภายใต้เงื่อนไขของความสมบูรณ์ของการไหล (ความคล้ายคลึง) ของเวลาในระบบเหล่านี้
กลศาสตร์บนสมมติฐานของความสมบูรณ์ของเวลาเรียกว่า นิวตันหรือคลาสสิก กฎพื้นฐานของกลศาสตร์นี้ถูกกำหนดโดยนิวตันในหลักการทางคณิตศาสตร์ของปรัชญาธรรมชาติของเขา ซึ่งตีพิมพ์ในปี ค.ศ. 1687
ในการเคลื่อนที่เป็นเส้นตรง อัตราการเปลี่ยนแปลงของความเร็ว วีลักษณะ อัตราเร่งว คือ การเปลี่ยนแปลงความเร็วต่อหน่วยเวลา
ในกรณีทั่วไปของการเคลื่อนที่โค้งตามอำเภอใจ เวกเตอร์ความเร็ว วี เปลี่ยนได้ทั้งขนาดและทิศทาง อัตราการเปลี่ยนแปลงของเวกเตอร์ความเร็วจะถูกกำหนดโดยบางส่วน เวกเตอร์การเร่งความเร็วW.
ให้ในช่วงเวลา t ความเร็วของจุดวัสดุ วี, และในขณะนี้ t 1 = t + t มันเท่ากับ วี 1 = วี + วี. สำหรับ t \u003d t 1 - t ความเร็วจะเปลี่ยนโดย วี = วี 1 – วี. เปลี่ยนความเร็วต่อหน่วย เวลา (ความเร่ง) จะเท่ากับ วี/ t = W - ความเร่งเฉลี่ยของจุดเคลื่อนที่ ร่างกาย.
เช่นเดียวกับการพิจารณาความเร็ว W จะไม่เหมือนกันสำหรับเซ็กเมนต์ที่ต่างกัน t ซึ่งนำมาจากช่วงเวลาหนึ่ง t เช่น ไม่สามารถทำหน้าที่เป็นคุณลักษณะที่ชัดเจนของอัตราการเปลี่ยนแปลงของเวกเตอร์ความเร็วในช่วงเวลาที่กำหนด
แต่เมื่อเซ็กเมนต์ t ลดลงเหลือค่าเพียงเล็กน้อย การลดลงต่อไปจะไม่นำไปสู่การเปลี่ยนแปลงในอัตราส่วน Vt กล่าวคือ ที่ t0 อัตราส่วน Vt จะมีแนวโน้มถึงขีดจำกัดที่แน่นอน:
ลิม Vt dVdt W, t
ซึ่งจะช่วยให้ เวกเตอร์ที่แท้จริงหรือ การเร่งความเร็วทันที
ความเร่งสามารถแสดงเป็น
W = dV dt = d dt (dr/dt) = d 2 r/dt 2 , เช่น เท่ากับอนุพันธ์อันดับสองของเวกเตอร์รัศมีเทียบกับเวลา
อัตราส่วนของเวกเตอร์ V ต่อสเกลาร์ t เป็นเวกเตอร์ขนานกับการเปลี่ยนแปลงของความเร็ว V นั่นเป็นเหตุผลที่ อัตราเร่งเป็นขีดจำกัดของอัตราส่วนนี้ที่ t 0 เป็นเวกเตอร์กำกับ วี . แต่ วี- มุ่งตรงไปยังวิถีโคจร ตามด้วยเวกเตอร์ความเร่ง W || วีและมักจะถูกชี้นำไปยังตำแหน่งที่เวกเตอร์ความเร็วหรือแทนเจนต์ของวิถีเปลี่ยนตามเวลา กล่าวคือ ไปทางเว้าของวิถี
ในกรณีทั่วไปของการเคลื่อนที่แบบโค้ง W ไม่ขนานกับ วี. เฉพาะกรณีการเคลื่อนที่เป็นเส้นตรง W| | เ วี, ถ้า วีเมื่อเวลาผ่านไป V 1 เพิ่มขึ้นหรือ W วี, ถ้า วีลดลง
ในกรณีของการเคลื่อนที่เป็นเส้นตรงสม่ำเสมอเวกเตอร์ วียังคงไม่เปลี่ยนแปลงตามกาลเวลา แล้ว W d วี/dt จะเป็นศูนย์ การเคลื่อนที่เป็นเส้นตรงสม่ำเสมอเป็นการเคลื่อนที่แบบเดียวโดยไม่เร่งความเร็ว!!
ถ้า W cons และ W || เ วีในกรณีนี้ความเร็วในช่วงเวลาเท่ากันจะเปลี่ยนเป็นจำนวนเท่ากันและเรียกว่าการเคลื่อนไหวดังกล่าว เส้นตรงที่เร่งความเร็วสม่ำเสมอ
S = S 0 + วี 0 t + น้ำหนัก 2 /2; วี = วี 0 + น้ำหนัก
แม้ว่าขนาดของความเร็วจะยังคงไม่เปลี่ยนแปลงในขนาดตลอดเวลา แต่ การเคลื่อนไหวโค้ง, เช่น. ความเร็วเปลี่ยนทิศทาง แล้วเร่งความเร็ว W 0 เพราะ V กลายเป็นแตกต่างจากศูนย์ที่ค่าจำกัดใดๆ ของ t นั่นเป็นเหตุผลที่ การเคลื่อนที่ของจุดสม่ำเสมอตามวงกลมคือการเคลื่อนที่ด้วยความเร่ง เนื่องจากความเร็วของมัน ตลอดเวลาที่สัมผัสกับวงกลมที่กำหนด จะเปลี่ยนทิศทางอย่างต่อเนื่อง
เช่นเดียวกับเวกเตอร์ใดๆ การเร่งความเร็วสามารถเขียนได้ในรูปของการฉายภาพบนแกนพิกัด:
W = W x I + W y j + W z k,
โดยที่ W x \u003d dV x / dt \u003d d / dt (dX / dt) \u003d d 2 X / dt 2
W y \u003d dV y / dt \u003d d / dt (dY / dt) \u003d d 2 Y / dt 2,
W z \u003d dV z / dt \u003d d / dt (dZ / dt) \u003d d 2 Z / dt 2,
และขนาดของเวกเตอร์ความเร่งจะเป็น
W \u003d W x 2 + W y 2 + W z 2
บ่อยครั้ง แทนที่จะแสดงเวกเตอร์ความเร่งในแง่ของการฉายภาพทั้งสามบนแกนพิกัด จะสะดวกกว่าในการแสดงเป็นผลรวมทางเรขาคณิตของสององค์ประกอบที่ชี้ไปตามเส้นสัมผัสไปยังวิถีโคจรและตามแนวปกติถึงวิถี องค์ประกอบแรก W - ความเร่งในแนวสัมผัสหรือแนวสัมผัสกำหนดอัตราการเปลี่ยนแปลงเฉพาะขนาดของความเร็วซึ่งเรียกว่า W n ที่สอง ความเร่งสู่ศูนย์กลางหรือความเร่งปกติกำหนดลักษณะอัตราการเปลี่ยนแปลงความเร็วในทิศทางเท่านั้น
W =W +W น . ว = ด วี/dt; W n = วี 2 /r และ
W W 2 + W n 2 = (d วี/dt) 2 + ( วี 2 /r) 2
สำหรับ การเคลื่อนไหวโค้งสม่ำเสมอ วี= const, W = 0 และ W=W n
สำหรับ การเคลื่อนที่เป็นเส้นตรงไม่สม่ำเสมอ(r=) W n =0 และ W =W . ถ้าในเวลาเดียวกัน W=const แล้ว การเคลื่อนไหวที่เร่งสม่ำเสมอ. 1.ถ้า เผ็ดจากนั้น tg = W n /W > 0 ซึ่งหมายความว่า d วี/dt > 0 เพราะ วี 2 /r > 0, เช่น ความเร็วเพิ่มขึ้นตามเวลา การจราจร เร่งสม่ำเสมอ. ถ้า - โง่ – การเคลื่อนไหวก็ช้าเหมือนกัน
แก้ไขในวิดีโอ เขียนคำแถลงถึงตำรวจจราจรพร้อมแนบไฟล์วิดีโอ
หรือไม่ก็เดินถือไม้เบสบอลเดินไปมา...คำถามที่ยากสำหรับฉัน .... เนื่องจากฉันเป็นแม่ลูก 5 คน .... ลูกชายคนโตอายุ 17 ปีและคนสุดท้องจะอายุ 2 ขวบในไม่ช้า ....
ฉันไม่ได้เป็นของพวกเขาในทางใดทางหนึ่ง ... เพราะเป็นไปได้มากว่านี่คือทิศทางของเยาวชน ..... และนั่นมาจากที่ไหน !!! เกิดขึ้นแล้ว...กังวลใจมากกว่า.....กว่าทิศทางเอง..
แต่มันเกิดขึ้น .... นี่คือสิ่งที่ฉันคิดและคิด ! .... เพราะให้ความสนใจเด็กเพียงเล็กน้อย ... ความเข้าใจผิดของเด็ก ... เด็กถูกปิด ... และกำลังมองหาประเภทของตัวเอง .. ..
แต่มันไม่ใช่แค่ความผิดของพ่อแม่ในเรื่องนี้ .... ความผิดอยู่ที่สังคมที่วัยรุ่นกลายเป็นอย่างที่พวกเขาเป็น ... ยังมีความผิดของเพื่อน เพื่อนร่วมชั้น เพื่อนฝูง .... ที่พวกเขาไม่ได้ทำ เข้าใจนะว่าพวกเขาไม่สนับสนุน ... .วัยรุ่นจึงไปทุกหมู่เหล่าและทุกทิศทาง ... บางครั้งก็ไปนิกายทางศาสนา .... และนี่อาจจะแย่กว่านั้นอีก ...
บางครั้ง เมื่อรู้ว่าคุณต้องการอะไร คุณไม่รู้ว่าจะไปทางไหน (ถนน) ในขณะที่ฉันกำลังเดินเป็นเส้นตรงและดูว่าจะทำอย่างไรให้บรรลุเป้าหมายที่ตั้งไว้สำหรับอนาคตอันใกล้นี้ ฉันไม่รู้ว่าถนนแห่งชีวิตจะหันไปทางไหน ฉันจึงจะเดินต่อไปในทิศที่ยังไม่รู้สำหรับตัวฉัน
กล่าวคือการเดินมีประโยชน์มาก .. แต่ถ้ามีเป้าหมายเช่นบรรพบุรุษของเรานักล่า - คนเก็บเห็ด - คนเก็บผลไม้โดยทั่วไปแล้วสาม
ไปข้างหน้าเท่านั้นไปข้างหน้า บางครั้งมองย้อนกลับไปเพื่อดูว่ามีอะไรตกจากเกวียนหรือไม่ หรือใครก็ได้)
โอ้แน่นอน!
เมื่อเราเลื่อนเมาส์ เราจะเลือกว่าจะรับข้อมูลใดหรือจะควบคุมโปรแกรมอย่างไร
ดังนั้นเราจึงกำลังทำอะไรบางอย่าง! :)
ดังนั้นเราจึงก้าวไปข้างหน้า
ทุกย่างก้าวคือชีวิต!
สวัสดีผู้พิทักษ์ =))))))))
ไม่มีความหมายที่แน่นอน - แต่คุณสามารถคิดขึ้นมาเองได้ ...
(และถ้าคุณมองโลกทั้งใบจากด้านข้าง คุณจะเห็นรูปแบบในนั้น .... และที่นั่นคุณจะไม่พบความหมายใดๆ สำหรับตัวคุณเอง มีเพียงความไม่มีที่สิ้นสุดของกระบวนการ ความเชื่อมโยงถึงกันของปรากฏการณ์ของ โลกแห่งความจริง - รูปแบบ .. )
คนที่คุณต้องการจริงๆ จะตามทันคุณอย่างแน่นอน
คุณได้เรื่องไร้สาระของตัวการ์ตูนนี้มาจากไหน?
ฉันจะเห็นด้วยถ้ามันเขียนว่า "คนที่ต้องการฉัน" และคนที่ คุณคุณต้องการพวกเขา คุณต้องบรรลุเป้าหมาย และสมควรได้รับความเคารพจากพวกเขา และอย่าหวังว่าพวกเขาจะพบคุณ ...
6. การเคลื่อนไหวโค้ง การกระจัดเชิงมุม ความเร็วเชิงมุม และความเร่งของร่างกาย เส้นทางและการกระจัดระหว่างการเคลื่อนไหวโค้งของร่างกาย
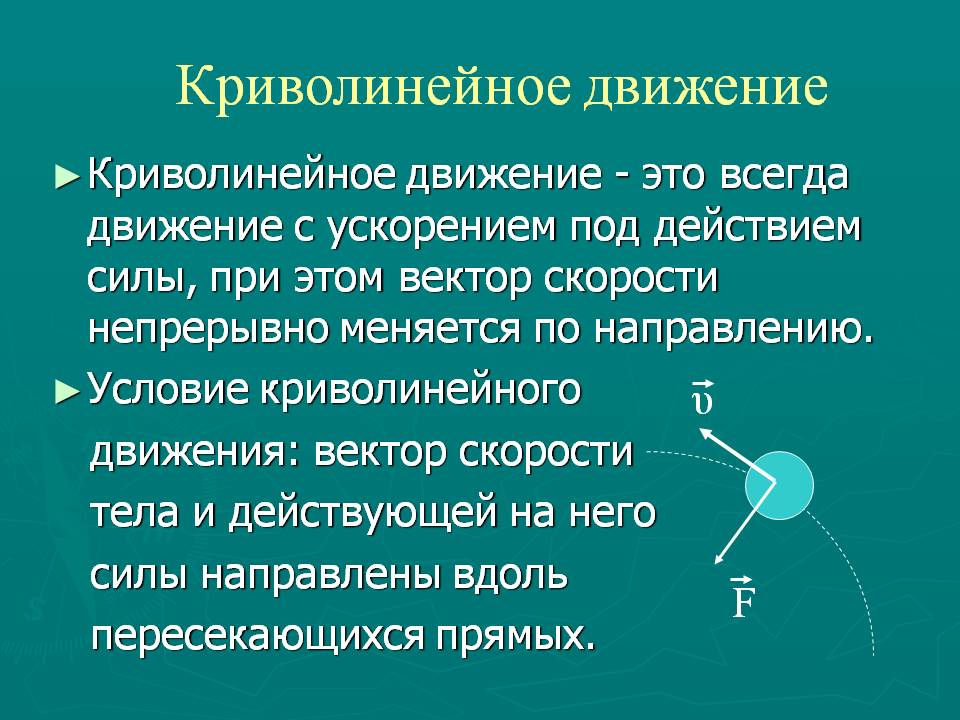
การเคลื่อนที่แบบโค้ง- นี่คือการเคลื่อนไหวที่มีวิถีเป็นเส้นโค้ง (เช่น วงกลม วงรี ไฮเพอร์โบลา พาราโบลา) ตัวอย่างของการเคลื่อนที่แบบโค้งคือการเคลื่อนที่ของดาวเคราะห์ การสิ้นสุดของเข็มนาฬิกาบนหน้าปัด ฯลฯ โดยทั่วไป ความเร็วโค้งการเปลี่ยนแปลงขนาดและทิศทาง
การเคลื่อนที่แบบโค้งของจุดวัสดุถือเป็นการเคลื่อนที่สม่ำเสมอหากโมดูล ความเร็ว ถาวร (เช่น การเคลื่อนไหวสม่ำเสมอรอบวง) และเร่งอย่างสม่ำเสมอหากโมดูลัสและทิศทาง ความเร็ว การเปลี่ยนแปลง (เช่น การเคลื่อนไหวของวัตถุที่พุ่งไปที่ขอบฟ้า)
ข้าว. 1.19. เวกเตอร์วิถีและการเคลื่อนที่ในแนวโค้ง
เมื่อเคลื่อนที่ไปตามทางโค้ง เวกเตอร์การกระจัด กำกับตามคอร์ด (รูปที่ 1.19) และ l- ความยาว วิถี . ความเร็วของร่างกายในทันที (นั่นคือ ความเร็วของร่างกาย ณ จุดที่กำหนดในวิถีโคจร) มุ่งตรงไปที่จุดนั้นในวิถีที่ร่างกายเคลื่อนที่อยู่ในปัจจุบัน (รูปที่ 1.20)
 ข้าว. 1.20. ความเร็วชั่วขณะในการเคลื่อนที่แบบโค้ง
ข้าว. 1.20. ความเร็วชั่วขณะในการเคลื่อนที่แบบโค้ง
การเคลื่อนที่แบบโค้งจะเป็นการเคลื่อนที่แบบเร่งเสมอ นั่นคือ ความเร่งในแนวโค้งมีอยู่เสมอแม้ว่าโมดูลัสของความเร็วจะไม่เปลี่ยนแปลง แต่มีเพียงทิศทางของความเร็วที่เปลี่ยนไป การเปลี่ยนแปลงของความเร็วต่อหน่วยเวลาคือ ความเร่งในแนวสัมผัส :
 หรือ
หรือ 
ที่ไหน วี τ , v 0 คือความเร็วในขณะนั้น t 0 + Δtและ t 0 ตามลำดับ
การเร่งความเร็วสัมผัส ที่จุดโคจรที่กำหนด ทิศทางจะตรงกับทิศทางความเร็วของวัตถุหรืออยู่ตรงข้ามกับทิศทางนั้น
อัตราเร่งปกติ คือการเปลี่ยนแปลงความเร็วในทิศทางต่อหน่วยเวลา:

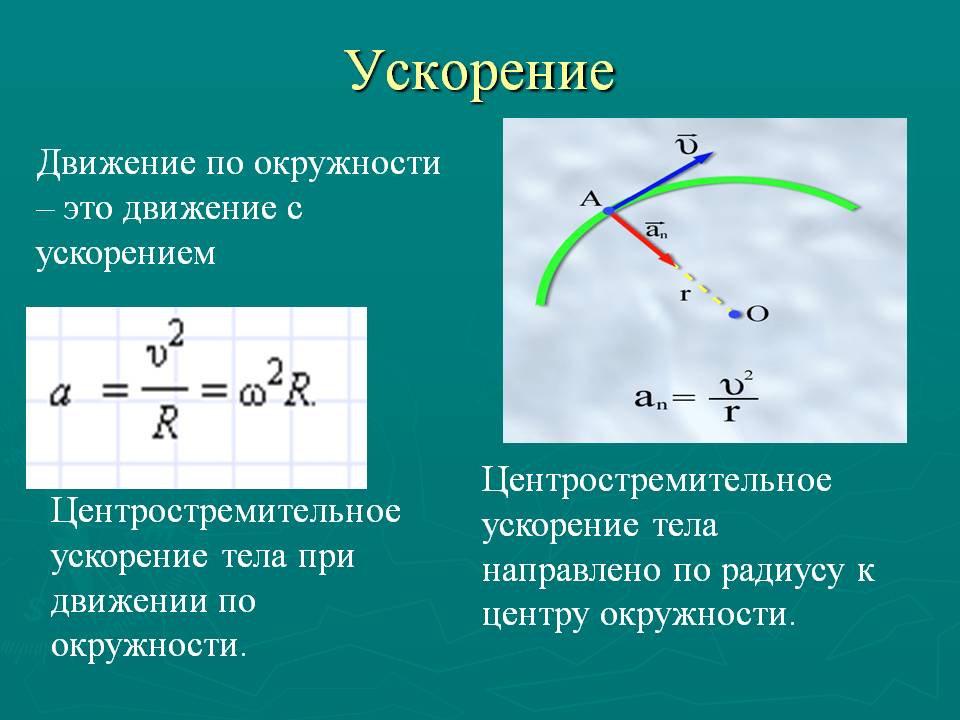
อัตราเร่งปกติชี้ไปตามรัศมีความโค้งของวิถี (ไปทางแกนหมุน) ความเร่งปกติตั้งฉากกับทิศทางของความเร็ว
ความเร่งสู่ศูนย์กลางคือความเร่งปกติของการเคลื่อนที่เป็นวงกลมสม่ำเสมอ
อัตราเร่งเต็มที่ด้วยการเคลื่อนไหวโค้งที่แปรผันเท่ากันของร่างกายเท่ากับ:
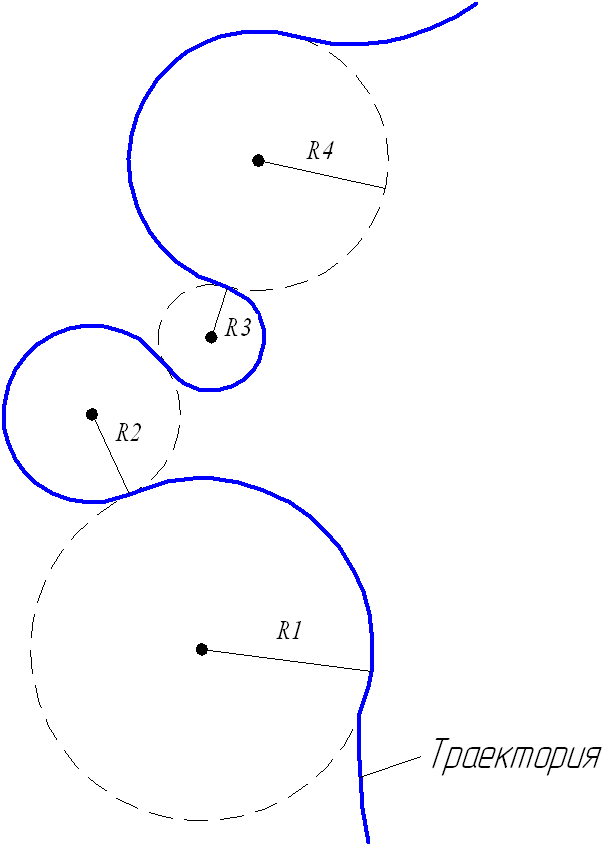
การเคลื่อนไหวของร่างกายตามวิถีโคจรโค้งสามารถแสดงได้โดยประมาณว่าเป็นการเคลื่อนไหวตามส่วนโค้งของวงกลมบางวง (รูปที่ 1.21)
 ข้าว. 1.21. การเคลื่อนไหวของร่างกายขณะเคลื่อนที่เป็นเส้นโค้ง
ข้าว. 1.21. การเคลื่อนไหวของร่างกายขณะเคลื่อนที่เป็นเส้นโค้ง
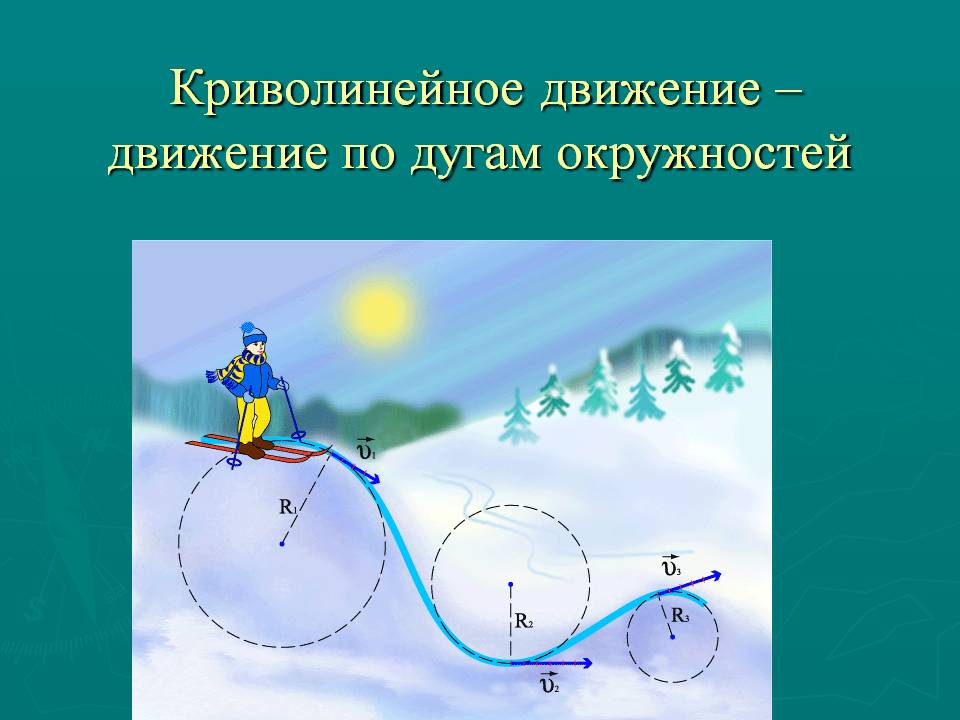
การเคลื่อนที่แบบโค้ง
การเคลื่อนไหวโค้ง- การเคลื่อนไหววิถีที่ไม่ตรง แต่เป็นเส้นโค้ง ดาวเคราะห์และน้ำในแม่น้ำเคลื่อนตัวไปตามวิถีโคจร
การเคลื่อนที่แบบโค้งจะเคลื่อนที่ด้วยความเร่งเสมอ แม้ว่าค่าสัมบูรณ์ของความเร็วจะคงที่ก็ตาม การเคลื่อนที่แบบโค้งด้วยความเร่งคงที่มักเกิดขึ้นในระนาบซึ่งมีเวกเตอร์ความเร่งและความเร็วต้นของจุดอยู่ ในกรณีของการเคลื่อนที่โค้งด้วยความเร่งคงที่ในระนาบ xOyประมาณการ วี xและ วี yความเร็วบนแกน วัวและ ออยและพิกัด xและ yคะแนนได้ตลอดเวลา tกำหนดโดยสูตร
![]()
![]()
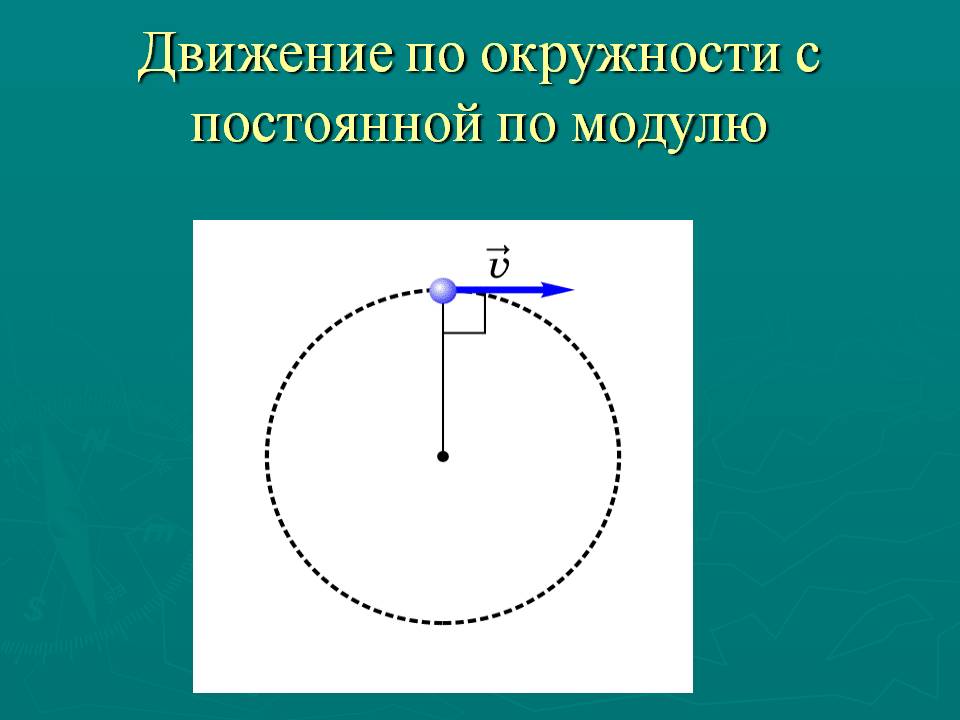
กรณีพิเศษของการเคลื่อนที่แบบโค้งคือการเคลื่อนที่แบบวงกลม การเคลื่อนที่แบบวงกลมแม้สม่ำเสมอจะเป็นการเคลื่อนที่แบบเร่งเสมอ: โมดูลัสความเร็วมักจะมุ่งตรงไปยังวิถีโคจร ทิศทางที่เปลี่ยนแปลงตลอดเวลา ดังนั้นการเคลื่อนที่แบบวงกลมจึงเกิดขึ้นด้วยความเร่งสู่ศูนย์กลางเสมอโดยที่ rคือรัศมีของวงกลม
เวกเตอร์ความเร่งเมื่อเคลื่อนที่ไปตามวงกลมมุ่งตรงไปยังจุดศูนย์กลางของวงกลมและตั้งฉากกับเวกเตอร์ความเร็ว
ในการเคลื่อนที่แบบโค้ง ความเร่งสามารถแสดงเป็นผลรวมขององค์ประกอบปกติและองค์ประกอบในแนวสัมผัสได้:
ความเร่งปกติ (ศูนย์กลาง) มุ่งสู่ศูนย์กลางความโค้งของวิถีและกำหนดลักษณะการเปลี่ยนแปลงความเร็วในทิศทาง:
วี-ความเร็วทันที, rคือรัศมีความโค้งของวิถีที่จุดที่กำหนด
การเร่งความเร็วในแนวสัมผัส (tangential) มุ่งตรงไปยังวิถีโคจรและกำหนดลักษณะการเปลี่ยนแปลงของโมดูโลความเร็ว
ความเร่งทั้งหมดที่จุดวัสดุเคลื่อนที่เท่ากับ:
นอกเหนือจากความเร่งสู่ศูนย์กลาง คุณลักษณะที่สำคัญที่สุดของการเคลื่อนที่สม่ำเสมอในวงกลมคือคาบและความถี่ของการหมุน
ระยะเวลาหมุนเวียนเป็นเวลาที่ร่างกายจะครบหนึ่งรอบ .
ช่วงเวลาจะแสดงด้วยตัวอักษร ตู่(c) และถูกกำหนดโดยสูตร:
ที่ไหน t- เวลาตอบสนอง พี- จำนวนการปฏิวัติที่เกิดขึ้นในช่วงเวลานี้
ความถี่ของการไหลเวียน- เป็นค่าตัวเลขที่เท่ากับจำนวนรอบที่ทำขึ้นต่อหน่วยเวลา
ความถี่แสดงด้วยอักษรกรีก (nu) และพบโดยสูตร:
ความถี่มีหน่วยวัดเป็น 1/s
ระยะเวลาและความถี่เป็นปริมาณผกผันซึ่งกันและกัน:
ถ้าร่างกายเคลื่อนที่เป็นวงกลมด้วยความเร็ว วีทำหนึ่งรอบจึงจะพบเส้นทางที่ร่างกายนี้เดินทางได้ด้วยการคูณความเร็ว วีหนึ่งเทิร์น:
ล. = vT.ในทางกลับกัน เส้นทางนี้เท่ากับเส้นรอบวง 2π r. นั่นเป็นเหตุผลที่
vT= 2π ร,
![]()
ที่ไหน w(จาก -1) - ความเร็วเชิงมุม.
ที่ความถี่การหมุนคงที่ ความเร่งสู่ศูนย์กลางจะเป็นสัดส่วนโดยตรงกับระยะห่างจากอนุภาคที่เคลื่อนที่ไปยังจุดศูนย์กลางของการหมุน
ความเร็วเชิงมุม (w) เป็นค่าที่เท่ากับอัตราส่วนของมุมการหมุนของรัศมีที่จุดหมุนอยู่ติดกับช่วงเวลาที่การหมุนนี้เกิดขึ้น:
![]() .
.
ความสัมพันธ์ระหว่างความเร็วเชิงเส้นและความเร็วเชิงมุม:
การเคลื่อนไหวของร่างกายสามารถพิจารณาได้ก็ต่อเมื่อทราบว่าแต่ละจุดเคลื่อนที่อย่างไร การเคลื่อนไหวที่ง่ายที่สุดของร่างกายที่แข็งกระด้างคือการแปล การแปลเรียกว่าการเคลื่อนไหว ร่างกายที่แข็งแรงซึ่งเส้นตรงใดๆ ที่ลากในร่างกายนี้เคลื่อนที่ขนานกับตัวมันเอง













![]() ย้อนกลับไปข้างหน้า
ย้อนกลับไปข้างหน้า
ความสนใจ! การแสดงตัวอย่างสไลด์มีวัตถุประสงค์เพื่อให้ข้อมูลเท่านั้นและอาจไม่ได้แสดงถึงขอบเขตทั้งหมดของการนำเสนอ หากคุณสนใจงานนี้ โปรดดาวน์โหลดเวอร์ชันเต็ม
วัตถุประสงค์ของบทเรียน:เพื่อให้นักเรียนได้แนวคิดเรื่องการเคลื่อนที่โค้ง ความถี่ การกระจัดเชิงมุม ความเร็วเชิงมุม คาบ เพื่อทำความคุ้นเคยกับสูตรการหาปริมาณและหน่วยวัดเหล่านี้ (สไลด์ 1 และ 2)
งาน:
เกี่ยวกับการศึกษา: เพื่อให้นักเรียนได้แนวคิดเกี่ยวกับการเคลื่อนที่แบบโค้งของวิถีของมัน ปริมาณที่กำหนดลักษณะ หน่วยของการวัดปริมาณเหล่านี้ และสูตรสำหรับการคำนวณ
เกี่ยวกับการศึกษา: พัฒนาทักษะต่อไปเพื่อใช้ความรู้เชิงทฤษฎีในการแก้ปัญหาเชิงปฏิบัติ พัฒนาความสนใจในเรื่องและความคิดเชิงตรรกะ
เกี่ยวกับการศึกษา: พัฒนาขอบเขตอันไกลโพ้นของนักเรียนต่อไป ความสามารถในการจดบันทึกในสมุดบันทึก สังเกต สังเกตรูปแบบของปรากฏการณ์ เพื่อโต้แย้งข้อสรุป
อุปกรณ์:รางเอียง, ลูกบอล, ลูกบอลบนด้าย, รถของเล่น, ลูกหมุน, นาฬิการุ่นมีลูกศร, เครื่องฉายมัลติมีเดีย, การนำเสนอ
ระหว่างเรียน
1. อัพเดทความรู้
ครู.
คุณรู้จักการเคลื่อนไหวประเภทใด
อะไรคือความแตกต่างระหว่างการเคลื่อนไหวเป็นเส้นตรงและโค้ง?
– ในกรอบอ้างอิงใดที่เราสามารถพูดถึงการเคลื่อนไหวประเภทนี้ได้?
– เปรียบเทียบ toolpath และ path สำหรับการเคลื่อนที่แบบเส้นตรงและแบบโค้ง (สไลด์ 3, 4).
2. คำอธิบายของวัสดุใหม่
ครู.ฉันสาธิต: ลูกบอลตกลงมาในแนวตั้ง กลิ้งไปตามรางน้ำ หมุนลูกบอลบนเส้นด้าย เคลื่อนรถของเล่นบนโต๊ะ โยนลูกเทนนิสที่มุมขอบฟ้า
ครู.อะไรคือความแตกต่างระหว่างวิถีการเคลื่อนที่ของร่างกายที่เสนอ? (คำตอบของนักเรียน)
พยายามให้ตัวเอง คำจำกัดความการเคลื่อนไหวโค้งและเส้นตรง (เข้าใน โน๊ตบุ๊ค):
– การเคลื่อนที่เป็นเส้นตรง – การเคลื่อนที่ตามแนววิถีตรงและทิศทางของแรงและเวกเตอร์ความเร็วเท่ากัน ; (สไลด์ 7)
– การเคลื่อนที่แบบโค้ง – การเคลื่อนที่ตามแนววิถีทางอ้อม
พิจารณาสองตัวอย่างการเคลื่อนที่ของเส้นโค้ง: ตามเส้นหักและตามแนวโค้ง (วาด สไลด์ 5, 6).
ครู.วิถีเหล่านี้แตกต่างกันอย่างไร?
นักเรียน.ในกรณีแรก วิถีสามารถแบ่งออกเป็นส่วนตรง และแต่ละส่วนสามารถพิจารณาแยกกัน ในกรณีที่สอง เป็นไปได้ที่จะแบ่งเส้นโค้งเป็นส่วนโค้งของวงกลมและส่วนที่เป็นเส้นตรง การเคลื่อนไหวนี้ถือได้ว่าเป็นลำดับของการเคลื่อนไหวที่เกิดขึ้นตามส่วนโค้งของวงกลมที่มีรัศมีต่างกัน (สไลด์ 8)
ครู.ยกตัวอย่างการเคลื่อนไหวเป็นเส้นตรงและโค้งที่คุณเคยพบในชีวิตของคุณ
3. ข้อความของนักเรียน ในธรรมชาติและเทคโนโลยีบ่อยครั้งมีการเคลื่อนไหวที่วิถีไม่ตรง แต่เป็นเส้นโค้ง นี่คือการเคลื่อนไหวโค้ง ดาวเคราะห์และบริวารเทียมของโลกเคลื่อนที่ไปตามวิถีโคจรในอวกาศรอบนอก และวิธีการขนส่งทุกชนิดบนโลก ชิ้นส่วนของเครื่องจักรและกลไก น้ำในแม่น้ำ อากาศในบรรยากาศ ฯลฯ
หากคุณกดปลายแท่งเหล็กกับหินลับที่หมุนอยู่ อนุภาคร้อนที่ออกมาจากหินจะมองเห็นได้ในรูปของประกายไฟ อนุภาคเหล่านี้บินด้วยความเร็วเท่ากันกับตอนที่แยกออกจากหิน จะเห็นได้ชัดเจนว่าทิศทางการเคลื่อนที่ของประกายไฟเกิดขึ้นพร้อมกับเส้นสัมผัสของวงกลมตรงจุดที่ไม้เท้าสัมผัสกับหิน แทนเจนต์สเปรย์ฉีดจากล้อรถลื่นไถล . (สไลด์ 9)
ครู.ดังนั้น ความเร็วชั่วขณะของร่างกายที่จุดต่าง ๆ ของวิถีโคจรโค้งมีทิศทางต่างกัน และสังเกตว่าเวกเตอร์ความเร็วและแรงที่กระทำต่อร่างกายจะมุ่งตรงไปตามเส้นตรงที่ตัดกัน . (สไลด์ 10 และ 11)
Modulo ความเร็วจะเท่ากันทุกที่หรือเปลี่ยนจากจุดหนึ่งไปอีกจุดหนึ่ง
แม้ว่าโมดูลัสของความเร็วจะไม่เปลี่ยนแปลง แต่ก็ถือว่าไม่คงที่ ความเร็วเป็นปริมาณเวกเตอร์ สำหรับปริมาณเวกเตอร์ โมดูลัสและทิศทางมีความสำคัญเท่าเทียมกัน และเวลา เปลี่ยนความเร็วจึงมีอัตราเร่ง ดังนั้นการเคลื่อนที่ของเส้นโค้งจึงเสมอกัน อัตราเร่งแม้ว่าโมดูโลจะมีความเร็วคงที่ก็ตาม (สไลด์ 12).
ความเร่งของร่างกายเคลื่อนที่สม่ำเสมอเป็นวงกลม ณ จุดใด ๆ ศูนย์กลาง, เช่น. กำหนดรัศมีของวงกลมเข้าหาศูนย์กลาง ที่จุดใดๆ เวกเตอร์ความเร่งจะตั้งฉากกับเวกเตอร์ความเร็ว (วาด)
โมดูลเร่งความเร็วสู่ศูนย์กลาง: a c \u003d V 2 / R (เขียนสูตร) โดยที่ V คือความเร็วเชิงเส้นของร่างกายและ R คือรัศมีของวงกลม . (สไลด์ 12, 13)
ครู.การเคลื่อนไหวในวงกลมมักไม่ได้เกิดจากความเร็วของการเคลื่อนไหว แต่ตามช่วงเวลาที่ร่างกายทำการปฏิวัติหนึ่งครั้ง ค่านี้เรียกว่า ระยะเวลาหมุนเวียนและเขียนแทนด้วยตัวอักษร T. (เขียนคำจำกัดความของช่วงเวลา) ลองหาความสัมพันธ์ระหว่างคาบของการปฏิวัติ T กับโมดูลัสของความเร็วสำหรับการเคลื่อนที่สม่ำเสมอตามวงกลมรัศมี R V \u003d S / t \u003d 2R / T. ( เขียนสูตรลงในสมุดบันทึกของคุณ (สไลด์ 14)
ข้อความของนักเรียนคาบเป็นค่าที่เกิดขึ้นบ่อยครั้งเพียงพอใน ธรรมชาติและเทคโนโลยี. ใช่เรารู้ ที่โลกหมุนบนแกนของมัน และระยะเวลาการหมุนเฉลี่ยคือ 24 ชั่วโมง การปฏิวัติโลกรอบดวงอาทิตย์อย่างสมบูรณ์ใช้เวลาประมาณ 365.26 วัน ใบพัดของกังหันไฮโดรลิกทำการปฏิวัติหนึ่งครั้งในเวลาเท่ากับ 1 วินาที ใบพัดเฮลิคอปเตอร์มีระยะเวลาการปฏิวัติจาก 0.15 เป็น 0.3 วินาที ระยะเวลาของการไหลเวียนโลหิตในมนุษย์ประมาณ 21-22 วินาที
ครู.การเคลื่อนที่ของวัตถุในวงกลมสามารถระบุได้ด้วยปริมาณอื่น - จำนวนรอบต่อหน่วยเวลา พวกเขาเรียกเธอว่า ความถี่หมุนเวียน: ν = 1/T หน่วยความถี่: s –1 = Hz. ( เขียนคำจำกัดความ หน่วย และสูตร)(สไลด์ 14)
ข้อความของนักเรียนเพลาข้อเหวี่ยงของเครื่องยนต์รถแทรกเตอร์มีความเร็วในการหมุน 60 ถึง 100 รอบต่อวินาที โรเตอร์เทอร์ไบน์แก๊สหมุนที่ความถี่ 200 ถึง 300 รอบต่อนาที กระสุนที่ยิงจากปืนไรเฟิลจู่โจม Kalashnikov หมุนด้วยความถี่ 3000 รอบต่อนาที
ในการวัดความถี่ มีอุปกรณ์ที่เรียกว่าวงกลมสำหรับวัดความถี่ตามภาพลวงตา บนวงกลมดังกล่าวจะใช้แถบสีดำและมีความถี่ เมื่อวงกลมดังกล่าวหมุน แถบสีดำจะสร้างวงกลมตามความถี่ที่สอดคล้องกับวงกลมนี้ เครื่องวัดความเร็วรอบยังใช้ในการวัดความถี่ . (สไลด์ 15)
(คุณสมบัติเพิ่มเติมสไลด์ 16, 17)
4. แก้ไขวัสดุ(สไลด์ 18)
ครู.ในบทเรียนนี้ เราได้ทำความคุ้นเคยกับคำอธิบายของการเคลื่อนที่ในแนวโค้ง ด้วยแนวคิดและปริมาณใหม่ๆ ตอบคำถามต่อไปนี้ให้ฉัน
การเคลื่อนที่แบบโค้งสามารถอธิบายได้อย่างไร?
การกระจัดเชิงมุมคืออะไร? วัดในหน่วยใด
ช่วงเวลาและความถี่คืออะไร? ปริมาณเหล่านี้เกี่ยวข้องกันอย่างไร? มีหน่วยวัดในหน่วยใดบ้าง? พวกเขาจะระบุได้อย่างไร?
อะไรเรียกว่าความเร็วเชิงมุม? วัดในหน่วยใด จะคำนวณได้อย่างไร?
(หากมีเวลา คุณสามารถดำเนินการทดลองเพื่อกำหนดระยะเวลาและความถี่ของการหมุนของเนื้อหาที่ถูกระงับจากเธรด)
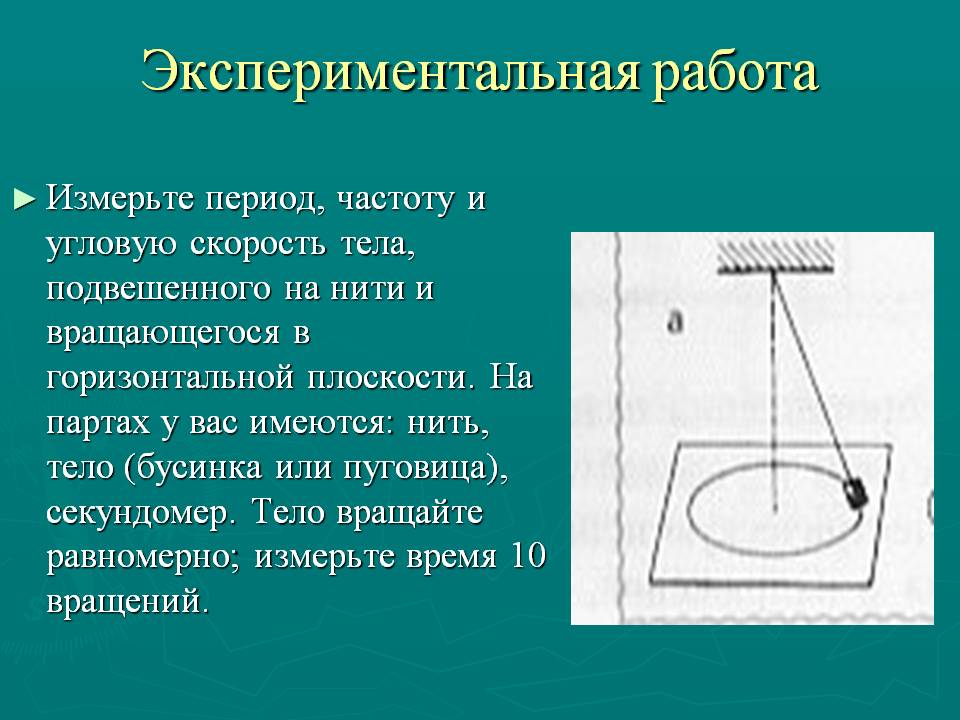
5. งานทดลอง:การวัดคาบความถี่ของวัตถุที่แขวนอยู่บนเกลียวและหมุนในระนาบแนวนอน ในการทำเช่นนี้ ให้เตรียมชุดอุปกรณ์เสริมสำหรับแต่ละโต๊ะทำงาน: ด้าย ตัวเครื่อง (ลูกปัดหรือปุ่ม) นาฬิกาจับเวลา คำแนะนำในการทำงาน: หมุนร่างกายอย่างสม่ำเสมอ ( เพื่อความสะดวกทำงานสองคน)และวัดเวลา 10 (จำคำจำกัดความของการปฏิวัติที่สมบูรณ์) (เสร็จงานแล้วค่อยคุยผล) (สไลด์ 19)
6. ควบคุมและตรวจสอบตนเอง
ครู.งานทดสอบต่อไปตามที่คุณเรียนรู้ วัสดุใหม่. คุณแต่ละคนมีการทดสอบและตารางสองตารางที่คุณต้องป้อนคำตอบ คุณจะลงนามอย่างใดอย่างหนึ่งและส่งเพื่อตรวจสอบ (ทดสอบ 1 ทำ 1 ตัวเลือก ทดสอบ 2 - ตัวเลือกที่สอง)
ทดสอบ 1(สไลด์ 20)
1. ตัวอย่างการเคลื่อนที่โค้งคือ ...
ก) หินตก
b) เลี้ยวรถไปทางขวา;
c) สปรินเตอร์วิ่ง 100 เมตร
2. เข็มนาทีของนาฬิกาทำให้เกิดการปฏิวัติหนึ่งครั้ง ระยะเวลาหมุนเวียนคืออะไร?
ก) 60 วินาที; b) 1/3600 วินาที; ค) 3600 วิ.
3. ล้อจักรยานทำให้หนึ่งรอบใน 4 วินาที กำหนดความเร็วในการหมุน
ก) 0.25 1/วินาที; ข) 4 1/วินาที; ค) 2 1/วิ
4. สกรูของเรือยนต์ทำให้ 25 รอบใน 1 วินาที ความเร็วเชิงมุมของสกรูคืออะไร?
ก) 25 rad/s; b) /25 rad/s; ค) 50 rad/s
5. กำหนดความเร็วในการหมุนของสว่านไฟฟ้าถ้าความเร็วเชิงมุมของมันคือ 400
ก) 800 1/s; ข) 400 1/วินาที; ค) 200 1/วินาที
ทดสอบ2(สไลด์ 20)
1. ตัวอย่างการเคลื่อนที่โค้งคือ...
ก) การเคลื่อนไหวของลิฟต์
b) นักเล่นสกีกระโดดจากกระดานกระโดดน้ำ
c) การร่วงหล่นของกรวยจากกิ่งล่างของต้นสนในสภาพอากาศที่สงบ
2. เข็มวินาทีของนาฬิกาทำให้เกิดการปฏิวัติหนึ่งครั้ง ความถี่ของการไหลเวียนคืออะไร?
ก) 1/60 วินาที; ข) 60 วินาที; ค) 1 วิ
3. ล้อรถหมุนได้ 20 รอบใน 10 วินาที กำหนดระยะเวลาการหมุนของล้อ?
ก) 5 วินาที; b) 10 วินาที; ค) 0.5 วิ
4. โรเตอร์ของกังหันไอน้ำทรงพลังทำให้ 50 รอบใน 1 วินาที คำนวณความเร็วเชิงมุม
ก) 50 rad/s; b) /50 rad/s; ค) 10 rad/s
5. กำหนดระยะเวลาของการหมุนของเฟืองจักรยานหากความเร็วเชิงมุมเท่ากัน
ก) 1 วินาที; ข) 2 วินาที; ค) 0.5 วิ
คำตอบสำหรับการทดสอบ 1:ข; ใน; ก; ใน; ใน
คำตอบสำหรับการทดสอบ 2:ข; ก; ใน; ใน; ข (สไลด์ 21)
7. สรุป
8. การบ้าน:§ 18, 19, คำถามถึง§§, แบบฝึกหัด 17, (ปากเปล่า) (สไลด์ 21)