ก) แนวคิดของเวกเตอร์
ในรูป 1-4 แสดงเส้นโค้งการเปลี่ยนแปลง กระแสสลับภายในเวลาที่กำหนด. กระแสแรกเพิ่มขึ้นจากศูนย์ (ที่ = 0 °) เป็นค่าบวกสูงสุด + I M (ที่ = 90°) จากนั้นลดลง ผ่านศูนย์ (at = 180°) ถึงค่าลบสูงสุด - I M (ที่ = 270 °) และสุดท้ายกลับเป็นศูนย์ (ที่ = 360°) หลังจากนั้นวงจรทั้งหมดของการเปลี่ยนแปลงในปัจจุบันจะทำซ้ำ

เส้นโค้งของการเปลี่ยนแปลงของกระแสสลับในเวลาที่สร้างในรูปที่ 1-4 เรียกว่าคลื่นไซน์ เวลา T ระหว่างที่การเปลี่ยนแปลงปัจจุบันเต็มรูปแบบเกิดขึ้น ซึ่งสอดคล้องกับการเปลี่ยนแปลงของมุมสูงสุด 360 ° เรียกว่าคาบกระแสสลับ จำนวนคาบใน 1 วินาทีเรียกว่าความถี่ของกระแสสลับ ในการติดตั้งทางอุตสาหกรรมและในชีวิตประจำวันในสหภาพโซเวียตและประเทศในยุโรปอื่น ๆ ส่วนใหญ่จะใช้กระแสสลับที่มีความถี่ 50 Hz 50 ครั้งต่อวินาทีในปัจจุบันนี้มีทิศทางบวกและลบ
การเปลี่ยนแปลงของกระแสสลับเมื่อเวลาผ่านไปสามารถเขียนได้ในรูปแบบต่อไปนี้:
โดยที่ i คือค่าปัจจุบันของกระแส นั่นคือ ค่าของกระแสในแต่ละช่วงเวลา I m - ค่าสูงสุดของกระแส; - ความถี่เชิงมุมกระแสสลับ, f= 50 Hz, = 314; - มุมเริ่มต้นที่สอดคล้องกับช่วงเวลาที่เริ่มนับถอยหลัง (ที่ t = 0)
สำหรับกรณีเฉพาะที่แสดงในรูปที่ 1-4,
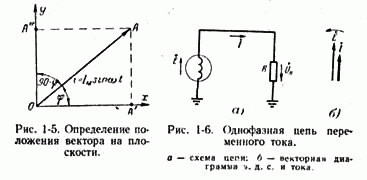
วิเคราะห์การทำงานของอุปกรณ์ การป้องกันรีเลย์และระบบอัตโนมัติ จำเป็นต้องเปรียบเทียบกระแสและแรงดัน เพิ่มหรือลบ กำหนดมุมระหว่างพวกมัน และดำเนินการอื่นๆ ใช้เส้นโค้งคล้ายกับที่แสดงในรูปที่ 1-4 ไม่สะดวกเนื่องจากการสร้างไซน์ซอยด์กระแสและแรงดันใช้เวลานานและไม่ให้ผลลัพธ์ที่ง่ายและมองเห็นได้ ดังนั้น เพื่อความเรียบง่าย จึงเป็นเรื่องปกติที่จะพรรณนากระแสและแรงดันไฟฟ้าในรูปแบบของส่วนของเส้นตรงที่มีความยาวและทิศทางที่แน่นอน ซึ่งเรียกว่าเวกเตอร์ (OA ในรูปที่ 1-4) ปลายด้านหนึ่งของเวกเตอร์ถูกกำหนดไว้ที่จุด O - จุดกำเนิดของพิกัด และปลายอีกด้านหนึ่งหมุนทวนเข็มนาฬิกา
ค่าทันทีของกระแสหรือแรงดันในแต่ละช่วงเวลาจะถูกกำหนดโดยการฉายภาพบนแกนแนวตั้งของเวกเตอร์ ซึ่งมีความยาวเท่ากับค่าสูงสุดของค่าไฟฟ้าของกระแสหรือแรงดัน การคาดการณ์นี้จะกลายเป็นค่าบวกหรือค่าลบโดยใช้ค่าสูงสุดเมื่อเวกเตอร์อยู่ในแนวตั้ง
ในช่วงเวลา T เท่ากับคาบของกระแสสลับ เวกเตอร์จะทำการหมุนเป็นวงกลมอย่างสมบูรณ์ (360 °) ครอบครองตำแหน่งต่อเนื่อง ฯลฯ ที่ความถี่กระแสสลับ 50 Hz เวกเตอร์จะทำให้ 50 รอบ / ส.
ดังนั้นเวกเตอร์กระแสหรือแรงดันจึงเป็นส่วนของเส้นตรงที่มีขนาดเท่ากับค่าสูงสุดของกระแสหรือแรงดัน หมุนสัมพันธ์กับจุด O ทวนเข็มนาฬิกาด้วยความเร็วที่กำหนดโดยความถี่ของกระแสสลับ เมื่อทราบตำแหน่งของเวกเตอร์ในแต่ละช่วงเวลา จะสามารถกำหนดค่ากระแสหรือแรงดันในทันที ณ ช่วงเวลาหนึ่งได้ ดังนั้น สำหรับตำแหน่งของเวกเตอร์ OA ปัจจุบัน ดังแสดงในรูปที่ 1-5 ค่าทันทีถูกกำหนดโดยการฉายภาพบนแกนตั้งเช่น
ขึ้นอยู่กับรูป 1-5 เราสามารถพูดได้ว่ากระแส ณ เวลาหนึ่งมีค่าเป็นบวก อย่างไรก็ตาม นี่ยังไม่ได้ให้ภาพที่สมบูรณ์ของกระบวนการในวงจรไฟฟ้ากระแสสลับ เนื่องจากไม่ทราบว่ากระแสบวกหรือลบ แรงดันบวกหรือลบหมายถึงอะไร
เพื่อให้ไดอะแกรมเวกเตอร์ของกระแสและแรงดันได้ภาพที่สมบูรณ์ พวกเขาจะต้องเชื่อมโยงกับกระบวนการจริงของกระบวนการในวงจรกระแสสลับ กล่าวคือ จำเป็นต้องยอมรับทิศทางบวกแบบมีเงื่อนไขของกระแสและแรงดันไฟฟ้าก่อน วงจรที่อยู่ในการพิจารณา
หากไม่มีเงื่อนไขนี้ หากไม่ได้ตั้งค่าทิศทางบวกของกระแสและแรงดัน แผนภาพเวกเตอร์ใดๆ ก็ไม่สมเหตุสมผล
พิจารณาวงจรไฟฟ้ากระแสสลับแบบเฟสเดียวอย่างง่ายที่แสดงในรูปที่ 1-6, ก. จากเครื่องกำเนิดไฟฟ้าแบบเฟสเดียว พลังงานจะถูกถ่ายโอนไปยัง ความต้านทานที่ใช้งานโหลด R ให้เรากำหนดทิศทางบวกของกระแสและแรงดันในวงจรภายใต้การพิจารณา
สำหรับทิศทางบวกแบบมีเงื่อนไขของแรงดันและแรงเคลื่อนไฟฟ้า ใช้ทิศทางเมื่อศักยภาพของเครื่องกำเนิดไฟฟ้าหรือโหลดที่เชื่อมต่อกับสายสูงกว่าศักยภาพของเอาต์พุตที่เชื่อมต่อกับกราวด์ ตามกฎที่ใช้ในวิศวกรรมไฟฟ้า ทิศทางบวกสำหรับ e. ดีเอส ระบุด้วยลูกศรที่ชี้ไปยังศักย์ไฟฟ้าที่สูงกว่า (จากขั้วสายถึงขั้วสาย) และสำหรับแรงดันไฟฟ้า โดยลูกศรชี้ไปยังศักย์ไฟฟ้าที่ต่ำกว่า (จากขั้วต่อสายถึงพื้น)
ให้เราสร้างเวกเตอร์ e ดีเอส และกระแสที่กำหนดลักษณะของวงจรที่กำลังพิจารณา (รูปที่ 1-6, b) เวกเตอร์ e. ดีเอส กำหนดโดยพลการด้วยเส้นแนวตั้งที่มีลูกศรชี้ขึ้น ในการสร้างเวกเตอร์ปัจจุบัน เราเขียนสมการของวงจรตามกฎ Kirchhoff ที่สอง:
เนื่องจากสัญญาณของเวกเตอร์ปัจจุบันและ e. ดีเอส ในนิพจน์ (1-7) ตรงกัน เวกเตอร์ปัจจุบันจะตรงกับเวกเตอร์ e ดีเอส และในรูป 1-6 ข.
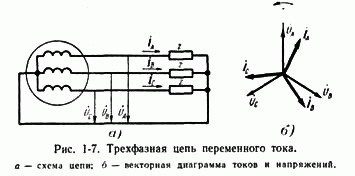
ที่นี่และในอนาคต ในการสร้างเวกเตอร์ เราจะแยกมันออกเป็นขนาดเท่ากับค่ากระแสและแรงดันที่มีประสิทธิภาพ ซึ่งสะดวกสำหรับการดำเนินการทางคณิตศาสตร์ต่างๆ ด้วยเวกเตอร์ ดังที่ทราบกันดีว่าค่าที่มีประสิทธิภาพของกระแสและแรงดันนั้นน้อยกว่าค่าสูงสุด (แอมพลิจูด) ที่สอดคล้องกันหลายเท่า
สำหรับทิศทางบวกของกระแสและแรงดันไฟที่กำหนด สัญญาณของกำลังจะถูกกำหนดอย่างเฉพาะเจาะจงเช่นกัน ในกรณีที่อยู่ระหว่างการพิจารณา กำลังที่ส่งตรงจากยางเครื่องกำเนิดไฟฟ้าไปยังท่อจะถือเป็นบวก:
เนื่องจากเวกเตอร์ปัจจุบันและ e ดีเอส ในรูป 1-6, การแข่งขันข
การพิจารณาที่คล้ายกันสามารถทำได้สำหรับ วงจรสามเฟสกระแสสลับที่แสดงในรูปที่ 1-7, ก.
ในกรณีนี้ ทิศทางบวกเหมือนกันในทุกเฟส ซึ่งสอดคล้องกับไดอะแกรมสมมาตรของกระแสและแรงดันไฟฟ้าที่แสดงในรูปที่ 1-7, ข. โปรดทราบว่าระบบเวกเตอร์สามเฟสดังกล่าวเรียกว่าสมมาตรเมื่อเวกเตอร์ทั้งสามมีขนาดเท่ากันและเลื่อนสัมพันธ์กันในมุม 120 °
โดยทั่วไปแล้ว ไม่จำเป็นต้องใช้ทิศทางเชิงบวกเหมือนกันในทุกระยะ อย่างไรก็ตาม ไม่สะดวกที่จะใช้ทิศทางเชิงบวกที่แตกต่างกันในขั้นตอนต่างๆ เนื่องจากจะต้องแสดงระบบเวกเตอร์ที่ไม่สมมาตรเมื่อทำงาน วงจรไฟฟ้าในโหมดสมมาตรปกติ เมื่อทั้งสามเฟสอยู่ในสภาวะเดียวกัน
b) การดำเนินการกับเวกเตอร์
เมื่อเราพิจารณาเส้นโค้งของกระแสหรือแรงดันเพียงเส้นเดียว ค่าเริ่มต้นของมุมที่การอ่านเริ่มต้นขึ้น หรือกล่าวอีกนัยหนึ่ง ตำแหน่งของเวกเตอร์บนไดอะแกรม ซึ่งสอดคล้องกับช่วงเวลาเริ่มต้นของเวลานั้นสามารถกำหนดได้โดยอำเภอใจ . หากพิจารณากระแสและแรงดันตั้งแต่สองกระแสขึ้นไปพร้อมกัน เมื่อกำหนดตำแหน่งเริ่มต้นบนไดอะแกรมของเวกเตอร์ตัวใดตัวหนึ่งแล้ว เราจึงกำหนดตำแหน่งของเวกเตอร์อื่นทั้งหมดแล้ว
เวกเตอร์ทั้งสาม แรงดันเฟสแสดงในรูป 1-7, b, หมุนทวนเข็มนาฬิกาด้วยความเร็วเท่ากัน, กำหนดโดยความถี่ของกระแสสลับ ในเวลาเดียวกัน พวกมันตัดกับแกนตั้งที่ประจวบกับทิศทางของเวกเตอร์ในรูปที่ 1-7,b ตามลำดับที่แน่นอนคือซึ่งเรียกว่าการสลับเฟสของแรงดัน (หรือกระแส)
เพื่อที่จะกำหนดตำแหน่งสัมพัทธ์ของเวกเตอร์สองตัว มักจะกล่าวกันว่าหนึ่งในนั้นอยู่ข้างหน้าหรือข้างหลังอีกตัวหนึ่ง ในกรณีนี้ เวกเตอร์นำจะถือเป็นเวกเตอร์ที่เมื่อหมุนทวนเข็มนาฬิกาจะข้ามแกนตั้งก่อนหน้านั้น ตัวอย่างเช่น เราสามารถพูดได้ว่าเวกเตอร์แรงดันไฟฟ้าในรูปที่ 1-7b นำเวกเตอร์ไปทำมุม 120° หรือในทางกลับกัน เวกเตอร์อยู่ข้างหลังเวกเตอร์ด้วยมุม 120° ดังจะเห็นได้จากรูปที่ 1-7 นิพจน์ "เวกเตอร์ล่าช้า 120°" เทียบเท่ากับนิพจน์ "เวกเตอร์นำ 240°"
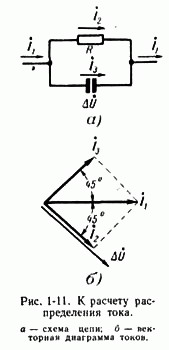
เมื่อวิเคราะห์ต่างกัน วงจรไฟฟ้าจำเป็นต้องเพิ่มหรือลบเวกเตอร์กระแสและแรงดัน การบวกเวกเตอร์ทำได้โดยการบวกเรขาคณิตตามกฎสี่เหลี่ยมด้านขนาน ดังแสดงในรูปที่ 1-8, a ซึ่งสร้างผลรวมของกระแส
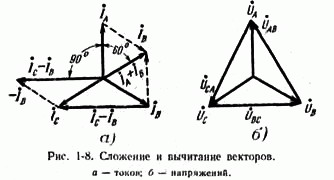
เนื่องจากการลบเป็นการกระทำย้อนกลับของการบวกจึงเห็นได้ชัดว่าเพื่อกำหนดความแตกต่างของกระแส (ตัวอย่างเช่น การเพิ่มเวกเตอร์ผกผันกับกระแสก็เพียงพอแล้ว
อย่างไรก็ตาม ในรูป 1-8 แต่แสดงให้เห็นแล้วว่าเวกเตอร์ผลต่างปัจจุบันสามารถสร้างขึ้นได้ง่าย ๆ โดยการเชื่อมต่อจุดสิ้นสุดของเวกเตอร์ด้วยเส้นตรง ในกรณีนี้ ลูกศรของเวกเตอร์ผลต่างปัจจุบันจะมุ่งตรงไปยังเวกเตอร์แรก กล่าวคือ
ไดอะแกรมเวกเตอร์ของแรงดันเฟสต่อเฟสถูกสร้างขึ้นในลักษณะที่คล้ายกันอย่างสมบูรณ์ ตัวอย่างเช่น ![]() (รูปที่ 1-8, ข).
(รูปที่ 1-8, ข).
|
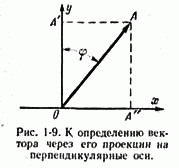
เห็นได้ชัดว่าตำแหน่งของเวกเตอร์บนระนาบถูกกำหนดโดยการฉายภาพบนแกนสองแกนใดๆ ตัวอย่างเช่น เพื่อกำหนดตำแหน่งของเวกเตอร์ OA (รูปที่ 1-9) ก็เพียงพอที่จะทราบเส้นโครงบนแกนตั้งฉากร่วมกัน
![]()
เราแยกการคาดคะเนของเวกเตอร์และบนแกนพิกัดและคืนค่าเส้นตั้งฉากกับแกนจากจุดต่างๆ จุดตัดของเส้นตั้งฉากเหล่านี้คือจุด A - ปลายด้านหนึ่งของเวกเตอร์ ปลายที่สองคือจุด O - จุดกำเนิดของพิกัด
c) วัตถุประสงค์ของไดอะแกรมเวกเตอร์
ผู้ปฏิบัติงานที่เกี่ยวข้องกับการออกแบบและการทำงานของการป้องกันรีเลย์มักต้องใช้ไดอะแกรมเวกเตอร์ที่เรียกว่าในการทำงาน - เวกเตอร์กระแสและแรงดันที่สร้างขึ้นบนระนาบในชุดค่าผสมที่สอดคล้องกับกระบวนการทางไฟฟ้าที่เกิดขึ้นในวงจรภายใต้การพิจารณา
แผนภาพเวกเตอร์ของกระแสและแรงดันถูกสร้างขึ้นเมื่อคำนวณการลัดวงจร เมื่อวิเคราะห์การกระจายกระแสในโหมดปกติ
|
การวิเคราะห์ไดอะแกรมเวกเตอร์ของกระแสและแรงดันเป็นหนึ่งในหลัก และในบางกรณี วิธีเดียวที่จะตรวจสอบการเชื่อมต่อที่ถูกต้องของวงจรกระแสและแรงดัน และการรวมรีเลย์ในวงจรป้องกันส่วนต่างและทิศทาง
ในความเป็นจริง แนะนำให้สร้างไดอะแกรมเวกเตอร์ในทุกกรณีเมื่อมีการจ่ายปริมาณไฟฟ้าสองค่าขึ้นไปให้กับรีเลย์ที่เป็นปัญหา: ความแตกต่างของกระแสในการป้องกันกระแสเกินหรือส่วนต่าง กระแสและแรงดันในรีเลย์ทิศทางกำลังหรือใน รีเลย์ความต้านทานทิศทาง แผนภาพเวกเตอร์ช่วยให้คุณสรุปได้ว่าการป้องกันที่เป็นปัญหาจะทำงานอย่างไรเมื่อ ไฟฟ้าลัดวงจรกล่าวคือประเมินความถูกต้องของการรวม การจัดการร่วมกันเวกเตอร์ของกระแสและแรงดันบนไดอะแกรมถูกกำหนดโดยลักษณะของวงจรที่กำลังพิจารณา เช่นเดียวกับทิศทางบวกของกระแสและแรงดันที่ยอมรับตามอัตภาพ
ตัวอย่างเช่น พิจารณาไดอะแกรมเวกเตอร์สองไดอะแกรม
|
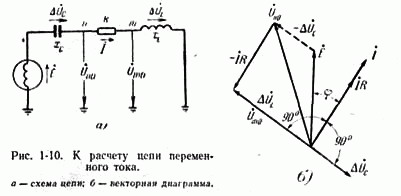
ในรูป 1-10 ตามภาพ วงจรเฟสเดียวกระแสสลับประกอบด้วยเครื่องกำเนิดไฟฟ้าและความต้านทานเชิงแอคทีฟและอุปนัยที่เชื่อมต่อแบบอนุกรม (เราคิดว่าความต้านทานอุปนัยมากกว่าตัวเก็บประจุ x L > x C) ทิศทางบวกของกระแสและแรงดัน ตลอดจนในกรณีที่พิจารณาข้างต้น แสดงไว้ในรูปที่ 1-10 แต่มีลูกศร มาเริ่มสร้างไดอะแกรมเวกเตอร์ด้วยเวกเตอร์ e กัน กระแสตรงซึ่งเราจะวางในรูปที่ 1-10, b ในแนวตั้ง ขนาดของกระแสที่ไหลผ่านในวงจรที่พิจารณาพิจารณาจากนิพจน์ต่อไปนี้:
![]()
เนื่องจากมีความต้านทานเชิงแอคทีฟและรีแอกทีฟในวงจรที่พิจารณา และ x L > x C เวกเตอร์ปัจจุบันจะล้าหลังเวกเตอร์แรงดันไฟฟ้าตามมุม:
ในรูป 1-10, b, เวกเตอร์ที่ล้าหลังเวกเตอร์ที่มุม 90 °ถูกสร้างขึ้น แรงดันที่จุด n ถูกกำหนดโดยผลต่างของเวกเตอร์ แรงดันไฟฟ้าที่จุด m ถูกกำหนดในทำนองเดียวกัน:
![]()
|

d) ไดอะแกรมเวกเตอร์ต่อหน้าการเปลี่ยนแปลง
หากมีหม้อแปลงอยู่ในวงจรไฟฟ้า จำเป็นต้องแนะนำเงื่อนไขเพิ่มเติมเพื่อเปรียบเทียบไดอะแกรมเวกเตอร์ของกระแสและแรงดันที่ด้านต่างๆ ของหม้อแปลง ในกรณีนี้ควรกำหนดทิศทางกระแสบวกโดยคำนึงถึงขั้วของขดลวดหม้อแปลงไฟฟ้า
ทิศทางร่วมกันของกระแสในนั้นขึ้นอยู่กับทิศทางที่คดเคี้ยวของขดลวดหม้อแปลงไฟฟ้า เพื่อกำหนดทิศทางของกระแสในขดลวดของหม้อแปลงไฟฟ้ากำลังและเปรียบเทียบกัน ขดลวดหม้อแปลงจะได้รับ อนุสัญญา"จุดเริ่มต้นและจุดสิ้นสุด".
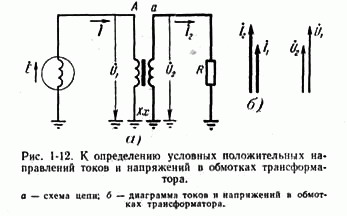
ลองวาดไดอะแกรมที่แสดงในรูปที่ 1-6 เฉพาะระหว่างแหล่งที่มา e. ดีเอส และโหลดให้เปิดหม้อแปลง (รูปที่ 1-12, a) เราแสดงถึงจุดเริ่มต้นของขดลวดของหม้อแปลงไฟฟ้าด้วยตัวอักษร A และ a ปลาย - X และ x ในกรณีนี้ควรระลึกไว้เสมอว่า "จุดเริ่มต้น" ของหนึ่งในขดลวดนั้นถูกนำมาใช้โดยพลการและส่วนที่สองนั้นพิจารณาจากทิศทางบวกตามเงื่อนไขของกระแสที่ระบุสำหรับขดลวดทั้งสองของหม้อแปลง ในรูป . 1-12 และระบุทิศทางบวกของกระแสน้ำในขดลวด หม้อแปลงไฟฟ้า. ในขดลวดปฐมภูมิทิศทางของกระแสจาก "จุดเริ่มต้น" ถึง "จุดสิ้นสุด" ถือเป็นค่าบวกและในส่วนรอง - จาก "จุดสิ้นสุด" ถึง "จุดเริ่มต้น"
ด้วยเหตุนี้ ด้วยทิศทางบวกเหล่านี้ ทิศทางกระแสในความต้านทานโหลดยังคงเหมือนเดิมก่อนที่จะเปิดหม้อแปลง (ดูรูปที่ 1-6 และ 1-12)
ฟลักซ์แม่เหล็กในวงจรแม่เหล็กของหม้อแปลงอยู่ที่ไหน และเป็นแรงแม่เหล็กที่สร้างฟลักซ์เหล่านี้ (n. s)
จากสมการสุดท้าย
ตามความเท่าเทียมกัน (1-11) เวกเตอร์มีเครื่องหมายเหมือนกันและดังนั้นจะอยู่ในทิศทางเดียวกัน (รูปที่ 1-12, b)
ทิศทางบวกที่ยอมรับของกระแสในขดลวดของหม้อแปลงนั้นสะดวกเพราะเวกเตอร์ของหลักและ
กระแสทุติยภูมิบนไดอะแกรมเวกเตอร์ตรงกันในทิศทาง (รูปที่ 1-12, b) สำหรับความเครียดก็สะดวกเช่นกันที่จะใช้ทิศทางบวกที่เวกเตอร์ของรองและ ความเครียดเบื้องต้นตรงกัน ดังแสดงในรูป 1-12.
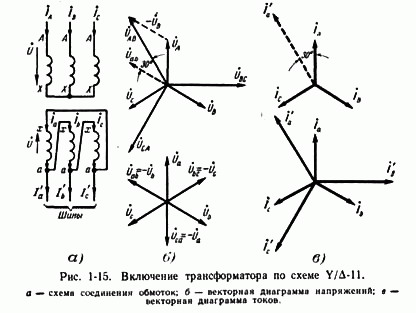
ในกรณีที่อยู่ระหว่างการพิจารณา ให้ต่อหม้อแปลงตามแบบ 1/1-12 ดังนั้น สำหรับ หม้อแปลงสามเฟสแผนภาพการเชื่อมต่อและแผนภาพเวกเตอร์ของกระแสและแรงดันแสดงในรูปที่ 1-14.
ในรูป 1-15, b พล็อตไดอะแกรมแรงดันเวกเตอร์ที่สอดคล้องกับไดอะแกรมการเชื่อมต่อหม้อแปลง
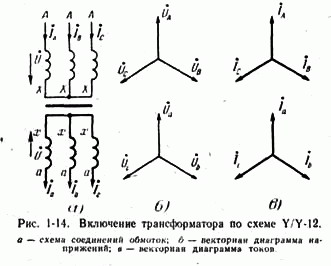
ด้านแรงดันไฟฟ้าที่สูงกว่า ซึ่งขดลวดเชื่อมต่อกับดาวฤกษ์ แรงดันไฟฟ้าระหว่างเฟสต่อเฟสจะสูงกว่าแรงดันไฟฟ้าเฟสหลายเท่า ที่ด้านแรงดันต่ำ ซึ่งขดลวดเชื่อมต่อเป็นรูปสามเหลี่ยม แรงดันไฟฟ้าระหว่างเฟสและเฟสจะเท่ากัน แรงดันไฟฟ้าแบบเฟสต่อเฟสของด้านแรงดันไฟต่ำอยู่ด้านหลังแรงดันเฟสต่อเฟสแบบอะนาล็อกของด้านแรงดันไฟฟ้าที่สูงกว่า 30° ซึ่งสอดคล้องกับแผนภาพการเดินสาย
สำหรับแผนภาพการเชื่อมต่อที่พิจารณาแล้วของขดลวดหม้อแปลงไฟฟ้า สามารถสร้างไดอะแกรมเวกเตอร์ของกระแสที่ไหลผ่านจากทั้งสองด้านได้ ควรระลึกไว้เสมอว่าตามเงื่อนไขที่เราได้นำมาใช้จะมีการกำหนดทิศทางบวกของกระแสในขดลวดของหม้อแปลงเท่านั้น ทิศทางบวกของกระแสในสายไฟเชิงเส้นที่เชื่อมต่อขั้วของขดลวดไฟฟ้าแรงต่ำของหม้อแปลงกับยางสามารถทำได้โดยพลการโดยไม่คำนึงถึงทิศทางบวกของกระแสที่ไหลผ่านในรูปสามเหลี่ยม
ตัวอย่างเช่น หากเราใช้ทิศทางบวกของกระแสในเฟสที่ด้านแรงดันต่ำจากขั้วที่เชื่อมต่อในรูปสามเหลี่ยมกับยาง (รูปที่ 1-15, a) เราสามารถเขียนความเท่าเทียมกันต่อไปนี้:
แผนภาพกระแสเวกเตอร์ที่สอดคล้องกันแสดงในรูปที่ 1-15, ค.
|
ในทำนองเดียวกัน มันเป็นไปได้ที่จะสร้างไดอะแกรมเวกเตอร์ของกระแสสำหรับกรณีที่ทิศทางบวกของกระแสถูกนำจากยางไปยังจุดสิ้นสุดของรูปสามเหลี่ยม (รูปที่ 1-16, a) กรณีนี้สอดคล้องกับความเท่าเทียมกันดังต่อไปนี้:
และแผนภาพเวกเตอร์ที่แสดงในรูปที่ 1-16, ข. เปรียบเทียบไดอะแกรมปัจจุบันที่แสดงในรูปที่ 1-15, c และ 1-16, b เราสามารถสรุปได้ว่าเวกเตอร์ของกระแสเฟสที่ไหลผ่านในสายไฟที่เชื่อมต่อขั้วของขดลวดต่ำ
แรงดันไฟฟ้าของหม้อแปลงและบัสอยู่ในแอนตี้เฟส แน่นอนว่าทั้งไดอะแกรมเหล่านั้นและไดอะแกรมอื่นนั้นถูกต้อง
ดังนั้นหากมีขดลวดเชื่อมต่อเป็นรูปสามเหลี่ยมในวงจร จำเป็นต้องกำหนดทิศทางบวกของกระแสทั้งในขดลวดเองและในเส้นตรงที่เชื่อมต่อสามเหลี่ยมกับบัส

ในกรณีที่อยู่ระหว่างการพิจารณา เมื่อกำหนดกลุ่มการเชื่อมต่อของหม้อแปลงไฟฟ้า จะสะดวกที่จะใช้ทิศทางจากขั้วไฟฟ้าแรงต่ำไปยังบัสเป็นค่าบวก เนื่องจากในกรณีนี้ ไดอะแกรมกระแสเวกเตอร์ตรงกับการกำหนดที่ยอมรับได้ของ กลุ่มเชื่อมต่อของหม้อแปลงไฟฟ้า (เปรียบเทียบรูปที่ 1-15, b และ c) ในทำนองเดียวกัน ไดอะแกรมเวกเตอร์ของกระแสสามารถสร้างขึ้นสำหรับการเชื่อมต่อกลุ่มอื่นของหม้อแปลงไฟฟ้ากำลัง กฎที่กำหนดไว้ข้างต้นสำหรับการสร้างไดอะแกรมเวกเตอร์ของกระแสและแรงดันในวงจรที่มีหม้อแปลงไฟฟ้าก็ใช้ได้กับ หม้อแปลงไฟฟ้ากระแสและแรงดันไฟ
พิจารณาสำหรับกรณีที่มีสายกลางที่ใช้งานได้ ไดอะแกรมเวกเตอร์ของแรงดันและกระแสแสดงในรูปที่ 15 และ 16 รูปที่ 17 แสดงแผนภาพรวมของกระแสและแรงดัน
1. สร้างแกนของระนาบเชิงซ้อน: ค่าจริง (+1) - แนวนอน, ค่าจินตภาพ (j) - แนวตั้ง
2. ขึ้นอยู่กับค่าของโมดูลกระแสและแรงดันและขนาดของเขตข้อมูลของแผ่นที่กำหนดสำหรับการพล็อตไดอะแกรม มาตราส่วนของ mI ปัจจุบันและแรงดัน mU จะถูกเลือก เมื่อใช้รูปแบบ A4 (ขนาด 210x297 มม.) กับโมดูลที่ใหญ่ที่สุด (ดูตารางที่ 8) ของกระแสไฟ 54 A และแรงดันไฟ 433 V จะใช้มาตราส่วน: mI = 5 A/ซม., mU = 50 V/ซม.
3. คำนึงถึงมาตราส่วน mI และ mU ที่ยอมรับ ความยาวของเวกเตอร์แต่ละตัวจะถูกกำหนดหากไดอะแกรมถูกสร้างขึ้นโดยใช้รูปแบบเลขชี้กำลังของการบันทึก เมื่อใช้รูปแบบพีชคณิตจะพบความยาวของเส้นโครงของเวกเตอร์บนแกนของปริมาณจริงและปริมาณจินตภาพ กล่าวคือ ความยาวของส่วนจริงและส่วนจินตภาพของคอมเพล็กซ์
ตัวอย่างเช่น สำหรับเฟส A:
ความยาวเวกเตอร์ปัจจุบัน / f.A / = 34.8 A / 5 A / cm = 6.96 cm; ความยาวของส่วนที่แท้จริง
I f.A \u003d 30 A / 5 A / cm \u003d 6 ซม.
ความยาวของส่วนจินตภาพ
I f.A \u003d -17.8 A / 5 A / cm \u003d - 3.56 cm;
ความยาวของเวกเตอร์แรงดันไฟฟ้า / โหลด A / \u003d 348 V / 50 V / cm \u003d 6.96 ซม. ความยาวของส่วนที่แท้จริง
U A โหลด = 340.5 V / 50 V / cm = 6.8 ซม.
ความยาวของส่วนจินตภาพ
ยู อากร. = 37.75 โวลต์ / 50 โวลต์/ซม. = 0.76 ซม.
ผลลัพธ์ของการกำหนดความยาวของเวกเตอร์ ส่วนจริงและส่วนจินตภาพแสดงไว้ในตารางที่ 9
ตารางที่ 9 - ความยาวของเวกเตอร์กระแสและแรงดัน ส่วนจริงและส่วนจินตภาพสำหรับกรณีของลวดเป็นกลางที่ไม่บุบสลาย
| ค่า | สเกล 1/ซม. | ความยาวเวกเตอร์ cm | ความยาวชิ้นส่วนจริง cm | ความยาวส่วนจินตภาพ cm | |
| แรงดันเฟสหลัก | ยูอา | 50 โวลต์/ซม. | 7,6 | 7,6 | |
| ยูวี | 7,6 | - 3,8 | - 6,56 | ||
| UC | 7,6 | - 3,8 | 6,56 | ||
| โหลดแรงดันเฟส | ยู อากร. | 50 โวลต์/ซม. | 6,96 | 6,8 | 0,76 |
| ยูวีโหลด | 7,4 | - 4,59 | - 5,8 | ||
| โหลด UC | 8,66 | -4,59 | 7,32 | ||
| U0 | 1,08 | 0,79 | - 0,76 |
ตารางที่ 9 ต่อ
| กระแสโหลดเฟส | ฉัน f.A | 5 A/ซม. | 6,96 | 6.0 | - 3,56 |
| ฉัน f.V | 7,4 | 1,87 | - 7,14 | ||
| ฉัน f.S | 3,13 | 0,1 | 3,12 | ||
| ฉัน 0 | 10,8 | 7,9 | - 7,6 |
4. การสร้างแผนภาพความเค้นเวกเตอร์
4.1 บนระนาบที่ซับซ้อนเวกเตอร์ของแรงดันเฟสของเครือข่ายอุปทาน A, B, C ถูกสร้างขึ้น โดยการเชื่อมต่อปลายของพวกเขาจะได้รับเวกเตอร์ของแรงดันไฟฟ้าเชิงเส้น AB, BC, CA จากนั้นเวกเตอร์ของแรงดันเฟสของโหลด A โหลด, โหลด B, โหลด C ในการสร้างคุณสามารถใช้ทั้งสองรูปแบบของการเขียนเชิงซ้อนของกระแสและแรงดัน
ตัวอย่างเช่น โหลดเวกเตอร์ A ถูกสร้างตามรูปแบบเลขชี้กำลังดังนี้ จากแกน +1 ที่มุม 6 10 คือ ทวนเข็มนาฬิกาแบ่งส่วนยาว 6.96 ซม. ในรูปแบบพีชคณิต สามารถสร้างได้โดยแยกส่วนที่ยาว 6.81 ซม. ตามแนวแกน +1 และส่วนยาว 0.76 ซม. ตามแกน + j ปลายของส่วนเหล่านี้เป็นพิกัดของจุดสิ้นสุดของเวกเตอร์ A โหลด .
4.2 เพราะ แรงดันไฟฟ้าสายโหลดถูกกำหนดโดยไฟหลักเพื่อกำหนดตำแหน่งของโหลดเป็นกลางจำเป็นต้องทำการถ่ายโอนเวกเตอร์แรงดันเฟสของโหลด A แบบขนาน, โหลด B, โหลด C เพื่อให้ปลายของพวกเขาตรงกับจุดสิ้นสุดของแรงดันเฟสของเครือข่ายอุปทาน
จุดที่ 0 ที่จุดเริ่มต้นจะเป็นโหลดที่เป็นกลาง ณ จุดนี้ จุดสิ้นสุดของเวกเตอร์แรงดันการกระจัดที่เป็นกลาง 0 ตั้งอยู่ จุดเริ่มต้นของมันอยู่ที่จุด 0 เวกเตอร์นี้ยังสามารถสร้างขึ้นโดยใช้ข้อมูลในตารางที่ 9
5. การสร้างไดอะแกรมเวกเตอร์ของกระแส
5.1 การสร้างเวกเตอร์ของกระแสเฟสของโหลด f.A, f.V, f.S นั้นคล้ายกับการสร้างเวกเตอร์ของแรงดันเฟส
5.2 โดยการเพิ่มเวกเตอร์กระแสเฟสจะพบเวกเตอร์ปัจจุบันในเส้นลวดที่เป็นกลางคือ 0; ความยาวและความยาวของเส้นโครงบนแกนต้องตรงกับที่ระบุในตารางที่ 8
ไดอะแกรมเวกเตอร์ของกระแสและแรงดันไฟฟ้าสำหรับกรณีการแตกหักในลวดเป็นกลางนั้นสร้างขึ้นในลักษณะเดียวกัน
จำเป็นต้องวิเคราะห์ผลการคำนวณและการสร้างไดอะแกรมเวกเตอร์และสรุปผลเกี่ยวกับผลกระทบของความไม่สมดุลของโหลดต่อขนาดของแรงดันเฟสและแรงดันเป็นกลาง ต้องให้ความสนใจเป็นพิเศษกับผลที่ตามมาของการแตกในสายกลางของเครือข่ายที่มีการโหลดแบบอสมมาตร
บันทึก. อนุญาตให้รวมไดอะแกรมของกระแสและแรงดันไฟเข้าด้วยกัน โดยต้องแสดงด้วยสีที่ต่างกัน
รูปที่ 15. แผนภาพความเค้นเวกเตอร์
รูปที่ 16. แผนภาพเวกเตอร์ของกระแส
รูปที่ 17 ไดอะแกรมเวกเตอร์รวมของแรงดันและกระแส
รูปที่ 25 - แผนภาพเวกเตอร์ของกระแสที่จุดบกพร่อง
รูปที่ 26- แผนภาพเวกเตอร์ของกระแสในส่วน A-A
 |
รูปที่ 27 - แผนภาพเวกเตอร์ของความเค้นในส่วน A-A
 |
รูปที่ 28 - แผนภาพเวกเตอร์ของกระแสใน ส่วน B-B
 |
รูปที่ 29 - แผนภาพเวกเตอร์ของความเค้นในส่วน В-В
การคำนวณองค์ประกอบเป็นระยะของกระแสลัดวงจรโดยวิธีเส้นโค้งทั่วไป
ภารกิจที่สาม การคำนวณองค์ประกอบเป็นระยะของกระแสลัดวงจรสามเฟส
โดยวิธีเส้นโค้งทั่วไป
เมื่อกำหนดกระแสเป็นระยะของการลัดวงจรสามเฟส ไดอะแกรมลำดับโดยตรงจะถูกวาดขึ้นสำหรับช่วงเวลาเริ่มต้นซึ่งเครื่องกำเนิดจะแสดงด้วยพารามิเตอร์ supertransient โหลดจะไม่ถูกนำมาพิจารณา (รูปที่ 2) วิธีการคำนวณทั่วไปมีอธิบายไว้ใน หลังจากการสมมูล จะได้วงจรระดับกลาง (รูปที่ 30) ซึ่งจะถูกแปลงเป็นรูปแบบรังสีที่สัมพันธ์กับจุดลัดวงจร (รูปที่ 31) ในกรณีนี้จะใช้ค่าสัมประสิทธิ์การแจกแจงปัจจุบัน
ในกระบวนการลดความซับซ้อนของวงจรสมมูล จะได้ค่าความต้านทานต่อไปนี้: X 15 =X 1 +X 2 /2=0+0.975425/2=0.4877125 r.u.
X 16 \u003d X 4 + X 5 \u003d 0.84 + 1.53 \u003d 2.37 p.u.
รูปที่ 30 - โครงร่างระดับกลาง รูปที่ 31 - รูปแบบการคำนวณ
X 17 \u003d X 6 + X 7 \u003d 0.88 + 0 \u003d 0.88 p.u.
X 18 \u003d X 11 + X 9 / 2 \u003d 0 + 1.240076 / 2 \u003d 0.620038 p.u.
X 19 \u003d X 12 + X 13 \u003d 2.117202 + 0.192308 \u003d 2.30951 p.u.
X EC \u003d X 18 * X 19 / (X 18 + X 19) \u003d 0.620038 * 2.30951 / (0.620038 + 2..30951) \u003d 0.488807 p.u.
C 1 \u003d X EC / X 18 \u003d 0.488807 / 0.620038 \u003d 0.78835
C 2 \u003d X EC / X 19 \u003d 0.488807 / 2.30951 \u003d 0.21165
X 20 \u003d (X eq + X 17) / C 1 \u003d 1.736294 p.u.
X 21 \u003d (X eq + X 17) / C 2 \u003d 6.467324 p.u.
ได้วงจรที่แสดงในรูปที่ 31 ต่อมามีกระแสคาบเริ่มต้นที่ตำแหน่งไฟฟ้าลัดวงจร
ฉัน "G \u003d E 2 / X 16 * I B \u003d 1.13 / 2.27 * 2.5102 \u003d 1.196846 kA
ฉัน "C1 \u003d E 1 / X 15 * I B \u003d 1 / 0.4877125 * 2.5102 \u003d 5.146885 kA
ฉัน "C2 \u003d E 3 / X 20 * I B \u003d 1 / 1.736294 * 2.5102 \u003d 1.445723 kA
ฉัน "C3 \u003d E 4 / X 21 * I B \u003d 1 / 6.467324 * 2.5102 \u003d 0.388136 kA
กระแสจากระบบคงที่ กระแสไฟฟ้าเป็นระยะตามเส้นโค้งทั่วไปถูกกำหนดไว้สำหรับ เครื่องกำเนิดไฟฟ้าแบบซิงโครนัสด้วยไทริสเตอร์หรือระบบกระตุ้นความถี่สูง ตามวิธีการคำนวณ จัดอันดับปัจจุบันเครื่องกำเนิดไฟฟ้าแบบซิงโครนัสแล้วกำหนดจำนวนของเส้นโค้งทั่วไป
ฉัน GN \u003d S GN / * UB \u003d 100 / ( * 0.85 * 230) \u003d 0.295320 kA;
ฉัน * PO \u003d ฉัน G2 " / ฉัน GN \u003d 1.196846 / 0.295320 \u003d 4.05 "4.
เนื่องจากอัตราส่วน I Г2 "/I ГН" 4 จึงมีการเลือกเส้นโค้งทั่วไป 4 เส้น:
ฉัน KZPOST \u003d ฉัน "C2 + ฉัน" C3 + ฉัน "C1 \u003d 5.1468885 + 1.445723 + 0.388136 \u003d 6.980748 kA
| t วินาที | 0,1 | 0,2 | 0,3 | 0,4 | 0,5 | |
| ฉัน Г t /ฉัน ” Г, r.u. | 0,85 | 0,78 | 0,755 | 0,75 | 0,745 | |
| ไอ จี ที , คะ | 1,1968 | 1,017 | 0,933 | 0,903 | 0,897 | 0,891 |
| รวม ฉัน K t , kA | 8,1775 | 7,9977 | 7,9137 | 7,8837 | 7,8777 | 7,872 |
ตัวอย่างเช่น ลองหากระแสเป็นระยะเป็นเวลา 0.1 วินาที ตามเส้นโค้ง 4 สำหรับช่วงเวลานี้ จะมีการกำหนดอัตราส่วน In,t,g/Inog=0.85
ค่าประสิทธิผลของส่วนประกอบเป็นระยะของกระแสลัดวงจรจากเครื่องกำเนิดถูกกำหนด: In, t, g \u003d 0.85 * Ino * I NOM \u003d 0.85 * 4.05 * 0.2953 \u003d 1.017 kA
กระแสคาบทั้งหมดที่ K (3) ในโหนด K โดยคำนึงถึงเส้นโค้งทั่วไปแสดงในรูปที่ 32
รูปที่ 32 - กราฟของการพึ่งพากระแสคาบทั้งหมดในช่วงเวลาลัดวงจร Iкt=f(t)
ภารกิจ IV การคำนวณองค์ประกอบเป็นระยะของกระแสลัดวงจรแบบอสมมาตรโดยวิธีเส้นโค้งทั่วไป
ในการกำหนดกระแสลัดวงจรเป็นระยะที่ K (1.1) วิธีการของเส้นโค้งทั่วไปจะใช้เพื่อวาดวงจรสมมูลของลำดับลบโดยไม่คำนึงถึงโหลด (รูปที่ 33) ถัดไป วงจรสมมูลถูกทำให้ง่ายขึ้นและได้รับความต้านทานลำดับลบที่เท่ากัน ลำดับของการทำให้เข้าใจง่ายแสดงไว้ด้านล่างและในรูปที่ 34-37
X 15 \u003d X 1 + X 2 / 2 \u003d 0 + 0.975425 / 2 \u003d 0.487713 p.u. X 16 \u003d X 4 + X 5 \u003d 0.84 + 1.87 \u003d 2.71 p.u.
X 17 \u003d X 6 + X 7 \u003d 0 + 0.88 \u003d 0.88 p.u. X 18 \u003d X 11 + X 9 / 2 \u003d 0 + 1.240076 / 2 \u003d 0.620038 p.u.
X 19 \u003d X 12 + X 13 \u003d 2.117202 + 0.230769 \u003d 2.347971 p.u.
X 20 \u003d X 15 * X 16 / (X 15 + X 16) \u003d 0.487713 * 2.71 / (0.487713 + 2.71) \u003d 0.413327 p.u.
X 22 \u003d X 17 + X 21 \u003d 0.88 + 0.490508 \u003d 1.370508 p.u. X EC2 \u003d X 20 * X 22 / (X 20 + X 22) \u003d 0.413327 * 1.370508 / / (0.413327 + 1.370508) \u003d 0.317556 p.u.

รูปที่ 33 - วงจรสมมูลลำดับลบ

รูปที่ 34 - การลดความซับซ้อนของรูปแบบที่ 1

รูปที่ 35 - การลดความซับซ้อนของรูปแบบที่ 2
รูปที่ 36 - การลดความซับซ้อนของรูปแบบที่ 3

รูปที่ 37 - วงจรสมมูลของผกผัน
ลำดับ
ในทำนองเดียวกัน เราจะวาดวงจรสมมูลของลำดับศูนย์ (รูปที่ 38) ขั้นตอนในการลดความซับซ้อนของวงจรสมมูลแสดงไว้ด้านล่างในรูปที่ 39-42
รูปที่ 38 - วงจรสมมูลลำดับศูนย์โดยประมาณ
X 13 \u003d X 1 + X 2 / 2 \u003d 0 + 4.585 / 2 \u003d 2.292 p.u. X 14 \u003d X 10 + X 9 / 2 \u003d 0 + 6.82 / 2 \u003d 3.41 p.u.
X 15 \u003d X 11 + X 12 \u003d 7.41 + 0.769 \u003d 8.18 p.u. X 16 \u003d X 13 * X 4 / (X 13 + X 4) \u003d 2.29225 * 0.84 / (2.29 + 0.84) \u003d 0.615 p.u.
X 18 \u003d X 6 + X 17 \u003d 0.88 + 1.338581 \u003d 2.219 p.u.
X 17 \u003d 1 / (1 / X 7 + 1 / X 15 + 1 / X 14) \u003d 1 / (1 / 3.016 + 1 / 8.18 + 1 / 3.41) \u003d 1.34 p.u.
รูปที่ 39 - การลดความซับซ้อนของรูปแบบที่ 1
 รูปที่ 40 - การลดความซับซ้อนของรูปแบบที่ 2
รูปที่ 40 - การลดความซับซ้อนของรูปแบบที่ 2
รูปที่ 41 - การลดความซับซ้อนของรูปแบบที่ 3

รูปที่ 42 - วงจรเทียบเท่าศูนย์
ลำดับ
ในการแก้ปัญหา จะใช้ข้อมูลลำดับตรงที่เทียบเท่าจากปัญหาก่อนหน้า โดยพิจารณาจากคุณลักษณะของ K (1.1) เราจะได้วงจรที่แสดงในรูปที่ 43 วงจรนี้จะถูกลดขนาดให้อยู่ในรูปแบบที่แสดงในรูปที่ 44