ฟิวส์ทั้งหมดกำลังเปลี่ยน องค์ประกอบไฟฟ้าออกแบบมาเพื่อปิดวงจรป้องกันโดยการหลอมองค์ประกอบป้องกันพิเศษ สำหรับการผลิตชิ้นส่วนที่หลอมละลายได้นั้นจะใช้ตะกั่ว โลหะผสมต่างๆ เช่นเดียวกับทองแดงหรือสังกะสี ฟิวส์ป้องกัน ไฟฟ้าของเน็ตและอุปกรณ์ในกรณีที่เกิดไฟฟ้าลัดวงจรและเกินพิกัดเป็นเวลานานที่ไม่สามารถยอมรับได้
คุณสมบัตินี้มีความสำคัญมากสำหรับหม้อแปลงและคอยล์ในเครือข่ายสวิตชิ่ง ตัวกรอง และการใช้งานอื่นๆ อีกมากมาย ขอบเขตที่สนามแม่เหล็กสามารถเก็บไว้ที่กระแสที่กำหนดในขดลวดนั้นแสดงโดยการเหนี่ยวนำความร้อน อย่างไรก็ตามในบางครั้งขดลวดก็เป็นข้อเสียเช่นกันหากไม่เป็นที่พึงปรารถนาที่จะชะลอการเปลี่ยนแปลงอย่างรวดเร็วของกระแส ซึ่งมักเกิดขึ้นเมื่อส่วนประกอบมีสายเชื่อมต่อหรือสายยาวเกินไป สิ่งนี้เรียกว่าการเหนี่ยวนำการรั่วไหล
สูตรที่สำคัญคือคำจำกัดความของการเหนี่ยวนำ นี่คือพารามิเตอร์ที่มีลักษณะเฉพาะที่สุดของคอยล์ สูตรนี้มีความสำคัญอย่างยิ่งในการอธิบายพฤติกรรมทางไฟฟ้าของขดลวดที่มีความเหนี่ยวนำที่รู้จัก ที่ขดลวดรวมแรงดันไฟฟ้าที่ใช้กับขั้วของมันและสร้างสนามแม่เหล็ก ผลที่ได้คือกระแสผ่านขดลวด นี่คือสิ่งที่ตรงกันข้ามกับตัวเก็บประจุ ซึ่งจะรวมกระแสที่จ่ายไปยังขั้วของมันและสร้างสนามไฟฟ้า ผลที่ได้คือแรงดันระหว่างขั้ว
หน้าที่ของฟิวส์
การทำงานปกติของอุปกรณ์เหล่านี้ได้รับผลกระทบอย่างมากจากการจัดอันดับฟิวส์ในปัจจุบัน ควรสังเกตทันทีว่าฟิวส์ทั้งหมดสามารถทำงานได้ในสองโหมดหลัก สิ่งเหล่านี้เป็นสภาวะการทำงานปกติ รวมถึงการโอเวอร์โหลดและไฟฟ้าลัดวงจรที่ยอมรับไม่ได้
ในกรณีแรก การทำงานของอุปกรณ์จะเกิดขึ้นระหว่างการทำงานปกติของเครือข่าย ภายใต้เงื่อนไขดังกล่าว องค์ประกอบที่หลอมได้จะถูกให้ความร้อนจนถึงอุณหภูมิการทำงานที่ตั้งไว้ เมื่อความร้อนทั้งหมดที่ปล่อยออกมาจะค่อยๆ เข้าสู่พื้นที่โดยรอบ ในกรณีนี้ ไม่เพียงแต่ส่วนประกอบป้องกันจะถูกให้ความร้อนจนถึงอุณหภูมิที่กำหนด แต่ยังรวมถึงส่วนอื่นๆ ของฟิวส์ด้วย ระหว่างการทำงานปกติ ค่าอุณหภูมิไม่ควรเกินขีดจำกัดที่อนุญาต
ที่ การใช้งานจริงขดลวดมักจะพันบนขดลวดเต็มด้วยแกนที่เหมาะสม คำนวณค่าความเหนี่ยวนำแล้ว ค่านี้แสดงถึงความต้านทานแม่เหล็กส่วนกลับของขดลวดและรวมทั้งรูปทรงและวัสดุแกนกลาง มีการระบุไว้ในแผ่นข้อมูลเคอร์เนล แต่สามารถคำนวณได้ สิ่งสำคัญคือต้องรู้ว่าการเหนี่ยวนำขึ้นอยู่กับจำนวนรอบเช่น ด้วยจำนวนขดลวดสองเท่าจะได้ตัวเหนี่ยวนำสี่เท่า
สำหรับสวิตช์คอนโทรลเลอร์ ข้อมูลคอยล์ต่อไปนี้มีความสำคัญเป็นพิเศษ ความต้านทานลวดเหนี่ยวนำ กระแสสูงสุดความอิ่มตัวในปัจจุบัน . การเหนี่ยวนำจะวัดว่ากระแสไฟฟ้าเปลี่ยนแปลงเร็วเพียงใดเมื่อใช้แรงดันไฟฟ้า โดยปกติ ขนาดขั้นต่ำขดลวดที่จำเป็นสำหรับกระแสกระเพื่อมซึ่งต้องเกินไม่เกินค่าที่กำหนด ความเหนี่ยวนำไม่คงที่ แต่จะแปรผันมากหรือน้อยตามความถี่หรือกระแส ขึ้นอยู่กับแกนปัจจุบัน โดยเฉพาะอย่างยิ่งแกนที่มีธาตุเหล็กมีการพึ่งพาความถี่และการเหนี่ยวนำกระแสไฟฟ้าอย่างเด่นชัด
ใช้องค์ประกอบที่หลอมละลายได้
องค์ประกอบที่หลอมละลายได้รับการออกแบบมาสำหรับกระแสไฟของฟิวส์ซึ่งรับประกันการทำงานอย่างต่อเนื่อง ในอีกทางหนึ่ง ค่านี้เรียกว่ากระแสพิกัดขององค์ประกอบที่หลอมได้ อาจแตกต่างไปจากค่าเดียวกันกับตัวฟิวส์เอง เนื่องจากองค์ประกอบที่ออกแบบสำหรับค่าที่แตกต่างกันสามารถใส่ลงในฟิวส์เดียวกันได้ ค่าปัจจุบันที่ระบุบนอุปกรณ์นั้นสอดคล้องกับค่าปัจจุบันสูงสุดสำหรับองค์ประกอบที่มีไว้สำหรับใช้ในการออกแบบนี้ แรงที่กำหนดจะกระจายปริมาณความร้อนจากวัสดุขององค์ประกอบไปยังส่วนอื่น ๆ ของฟิวส์อย่างสม่ำเสมอ
ดังนั้นการเหนี่ยวนำที่มีกระแสไฟที่กำหนดมักจะค่อนข้างต่ำกว่าตัวเหนี่ยวนำที่ไม่มีกระแส สิ่งนี้จะต้องนำมาพิจารณาเมื่อทำการปรับขนาดคอยล์ เนื่องจากการพึ่งพากระแสไฟที่แข็งแกร่ง การเหนี่ยวนำของขดลวดแกนผงเหล็กมักจะได้รับที่พิกัดกระแส หากไม่มีกระแสโหลด ตัวเหนี่ยวนำจะอยู่ที่ประมาณ 1.2-2
อย่างไรก็ตาม ในกรณีของขดลวดที่มีแกนเฟอร์ไรท์ ความเหนี่ยวนำมักจะถูกกำหนดโดยไม่มีกระแสโหลด โดยเฉพาะอย่างยิ่งความต้านทานของลวดส่งผลต่อประสิทธิภาพของวงจรหรือจำกัดกระแส RMS สูงสุดที่อนุญาตที่ไหลผ่านขดลวด ซึ่งสอดคล้องกับ 20% ของแรงดันไฟฟ้าขาเข้า! กระแสสูงสุดมักจะถูกกำหนดโดยการให้ความร้อนกับขดลวดสำหรับกระแสที่แน่นอน บ่อยครั้งนี่คือช่วงเวลาที่ขดลวดหมุน บ่อยครั้งสิ่งนี้ถูกวัด แรงดันคงที่หรือค่าที่มีประสิทธิภาพจะแสดงที่ความถี่ต่ำ
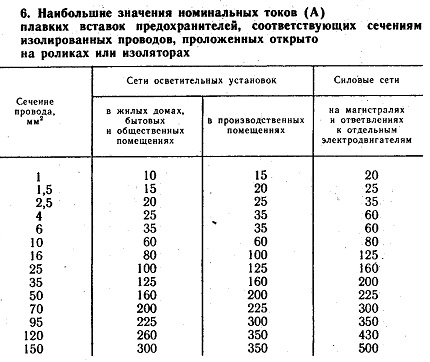
ในกรณีที่สอง การทำงานของฟิวส์เกิดขึ้นในสภาวะที่มีกระแสไฟเพิ่มขึ้นในเครือข่าย เพื่อลดเวลาหลอมละลายของเม็ดมีด ส่วนประกอบป้องกันจึงถูกผลิตขึ้นในรูปของเพลตที่มีช่องเจาะที่ออกแบบมาเพื่อลดส่วนตัดขวางในบางพื้นที่ ความร้อนจะถูกปล่อยออกมาในบริเวณช่องเจาะมากกว่าในบริเวณกว้าง
เมื่อใช้คอยล์ในสวิตชิ่งเรกูเลเตอร์ ค่านี้จะลดลง 50% เนื่องจากในด้านหนึ่งจะต้องสังเกตกระแสความอิ่มตัวและในทางกลับกันแกนภายในคอยล์จะได้รับความร้อนจากส่วนประกอบด้วย กระแสสลับ. โดยเฉพาะอย่างยิ่งแกนที่มีเหล็กมีการสูญเสียแกนที่ค่อนข้างสูงซึ่งอยู่ในช่วงเดียวกับการสูญเสียเนื่องจากความต้านทานของลวดในขนาดทั่วไป อย่างไรก็ตาม กระแสสูงสุดอาจเกินค่าปัจจุบันนี้ ตราบใดที่ค่า rms หรือความร้อนอยู่ภายในช่วงที่อนุญาต
ดังนั้น ในกรณี ไฟฟ้าลัดวงจรมีความร้อนที่รุนแรงของส่วนที่แคบลงและความเหนื่อยหน่ายพร้อมกันในหลาย ๆ ที่พร้อมกัน ในกรณีนี้ความแรงของกระแสในวงจรไม่มีเวลาเกินค่าที่กำหนด
ดังนั้นการใช้ฟิวส์ลิงค์ที่มีกระแสไฟต่างกันจึงเป็นไปได้ที่จะให้การป้องกันที่มีประสิทธิภาพสำหรับอุปกรณ์ไฟฟ้าและเครือข่ายไฟฟ้าต่างๆ
กระแสอิ่มตัวเกือบจะเป็นเกณฑ์ที่สำคัญที่สุดในการเลือกขดลวด เพราะถ้าค่านี้ต่ำเกินไป ขดลวดจะไม่มีประโยชน์สำหรับวงจร ตามที่อธิบายไว้แล้วสำหรับตัวเหนี่ยวนำ สิ่งนี้ขึ้นอยู่กับกระแสของคอยล์มากหรือน้อย หากกระแสเพิ่มขึ้นอีก ความเหนี่ยวนำจะลดลงอย่างรวดเร็วขึ้นอยู่กับวัสดุของแกนกลางและการออกแบบทางกล การลดลง 10 เท่าไม่ใช่เรื่องแปลก
กระแสอิ่มตัวจะไม่มีวันเกินด้วยตัวควบคุมการสลับที่กำหนดค่าไว้อย่างเหมาะสม เนื่องจากข้อจำกัดนี้จะมีผลก่อนหน้านี้ ในทางกลับกัน ในกรณีที่มีการออกแบบที่ไม่ดี ขีดจำกัดกระแสจะแสดงที่กระแสสูงเท่านั้นเมื่อขดลวดเข้าสู่ความอิ่มตัว ส่งผลให้เกิดการสูญเสียโดยไม่จำเป็นและควรหลีกเลี่ยง
สวัสดีผู้อ่านที่รักและแขกของเว็บไซต์ Electrician's Notes
ฉันตัดสินใจเขียนบทความเกี่ยวกับการคำนวณกระแสไฟสำหรับมอเตอร์ไฟฟ้าสามเฟส
คำถามนี้มีความเกี่ยวข้องและในแวบแรกดูเหมือนว่าไม่ซับซ้อนนัก แต่ด้วยเหตุผลบางอย่างข้อผิดพลาดมักเกิดขึ้นในการคำนวณ
เป็นตัวอย่างการคำนวณ ฉันจะใช้มอเตอร์แบบอะซิงโครนัสสามเฟส AIR71A4 ที่มีกำลัง 0.55 (kW)
เนื่องจากความเหนี่ยวนำของขดลวดในความอิ่มตัวมีน้อย จึงไม่สามารถเก็บพลังงานเพิ่มเติมได้ ดังนั้นพลังงานส่วนใหญ่ที่ไหลเข้าสู่คอยล์จะถูกแปลงเป็นความร้อนในตัวต้านทานลวดหรือในทรานซิสเตอร์สวิตชิ่ง ซึ่งลดประสิทธิภาพลงอย่างมากและอาจเกินการควบคุมสวิตช์ควบคุม
ในขดลวดทั่วไปสำหรับการจ่ายไฟแบบสวิตชิ่ง กระแสอิ่มตัวจะอยู่ที่ประมาณ 1.5-2 ของกระแสไฟที่กำหนด ซึ่งช่วยให้สามารถใช้กระแสไฟที่กำหนดได้อย่างเต็มที่ เนื่องจากระลอกปัจจุบันอยู่ที่ประมาณ 50% ของกระแสไฟที่กำหนด กระแสไฟสูงสุดจะอยู่ที่ 1.5 เท่าของกระแสไฟที่กำหนด
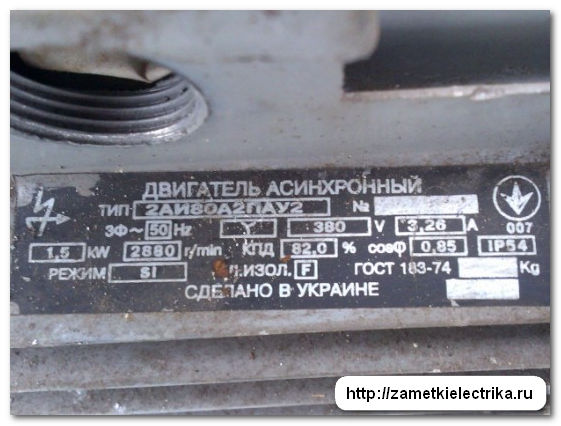
นี่คือลักษณะที่ปรากฏและแท็กด้วยข้อมูลทางเทคนิค


กระแสที่กำหนดโดยตัวต้านทานจำกัดสามารถเกิดขึ้นได้บน ไม่ทำงานไม่มีโหลด โหลดต่ำจึงไม่ป้องกันความอิ่มตัว! เมื่อจำเป็นต้องเก็บพลังงานจำนวนมากในขดลวดอันเนื่องมาจากการใช้งาน จำเป็นต้องมีช่องว่างอากาศ ส่วนใหญ่ของพลังงานจะไม่ถูกเก็บไว้โดยตรงในวัสดุนิวเคลียร์อีกต่อไป แต่ในช่องว่างอากาศ ยิ่งช่องว่างอากาศมีขนาดใหญ่เท่าใด ขดลวดก็ยิ่งเก็บพลังงานได้มากเท่านั้น แต่ต้องใช้ขดลวดมากขึ้นเพื่อให้ได้ค่าความเหนี่ยวนำบางอย่าง
สิ่งนี้ใช้กับตัวแปลงฟลายแบ็ครวมถึงเครื่องปฏิกรณ์หน่วยเก็บในตัวแปลงโฟลว์ ตัวอย่างเช่น ไม่จำเป็นต้องมีช่องว่างอากาศในหม้อแปลงฟลักซ์ แกนเฟอร์ไรท์ที่ใช้ในคอนเวอร์เตอร์หรือโช้กที่ชดเชยกระแสไฟไม่มีช่องว่างอากาศ ดังนั้นจึงไม่สามารถเก็บพลังงานได้ จึงไม่เหมาะสำหรับเก็บเครื่องปฏิกรณ์หรืออินเวอร์เตอร์ วงแหวนแกนผงโลหะไปทางอื่น: ที่นี่ช่องว่างพลาสติกน้อยที่สุดระหว่างอนุภาคเหล็กแต่ละอันเป็นช่องว่างอากาศอยู่แล้ว ดังนั้นจึงไม่จำเป็นต้องมีช่องว่างอากาศเพิ่มเติม
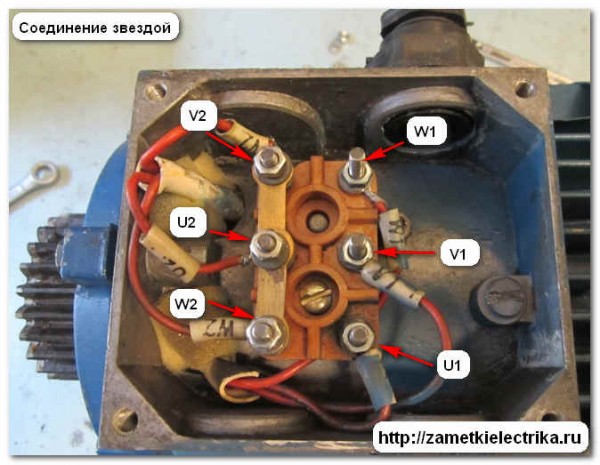
หากคุณวางแผนที่จะเชื่อมต่อเครื่องยนต์กับ เครือข่ายสามเฟส 380 (B) ซึ่งหมายความว่าต้องต่อขดลวดตามรูปแบบ "ดาว" เช่น บนแผงขั้วต่อ จำเป็นต้องเชื่อมต่อเอาต์พุต V2, U2 และ W2 เข้าด้วยกันโดยใช้จัมเปอร์พิเศษ
อย่างไรก็ตาม วัสดุที่ใช้เพื่อการนี้มีการสูญเสียการสะกดจิตสูงกว่าเฟอร์ไรท์อย่างมีนัยสำคัญ ดังนั้น แกนผงเหล็กจึงมักใช้สำหรับ ความถี่ต่ำ. วัสดุที่ใช้กันอย่างแพร่หลายคือแกนวงแหวนที่มีเครื่องหมายสีเหลืองและสีขาวพร้อมรหัสวัสดุ ลักษณะนี้มีต้นทุนต่ำเป็นหลัก ช่วงการใช้งานทั้งในโช้คปราบปรามสำหรับแอพพลิเคชั่น DC หรือ 50 Hz หรือในเครือข่ายสวิตชิ่งสูงถึง 100 kHz สำหรับความถี่ที่สูงกว่า วัสดุที่มีราคาแพงกว่าย่อมดีกว่าและแน่นอนว่ามีจำหน่าย
เมื่อเชื่อมต่อมอเตอร์นี้กับเครือข่ายสามเฟสที่มีแรงดันไฟฟ้า 220 (V) จะต้องต่อขดลวดเป็นรูปสามเหลี่ยมเช่น ติดตั้งจัมเปอร์สามตัว: U1-W2, V1-U2 และ W1-V2
มาเริ่มกันเลยดีกว่า
ความสนใจ! กำลังบนแผ่นป้ายของเครื่องยนต์ไม่ได้ระบุว่าไม่ใช่ไฟฟ้า แต่เป็นกลไกเช่น กำลังทางกลที่มีประโยชน์บนเพลามอเตอร์ สิ่งนี้ระบุไว้อย่างชัดเจนใน GOST R 52776-2007 ปัจจุบัน ข้อ 5.5.3:
อย่างไรก็ตาม ควรสังเกตว่าการเหนี่ยวนำของแกนเฟอร์ไรต์นั้นขึ้นอยู่กับความถี่ กระแส และอายุอย่างมาก! แกนผงเหล็กจะเร็วมากหรือน้อยลงและขดลวดสูญเสียความเหนี่ยวนำทั้งนี้ขึ้นอยู่กับอุณหภูมิ ขนาดของแกนกลางของแหวนเครื่องเพอร์คัชชันเฟอร์โรนั้นไม่ใช่เรื่องง่าย เนื่องจากต้องคำนึงถึงปัจจัยจำนวนมากที่นี่ การคำนวณการสูญเสียขั้นพื้นฐานก็ซับซ้อนเช่นกัน แต่ผู้ผลิตบางรายมีสูตรหรือโปรแกรมคำนวณ Micrometals: Ring Powder Core Calculation Program

มีประโยชน์ พลังงานกลเรียกว่า R2
แม้แต่น้อยแท็กระบุพลังใน แรงม้า(hp) แต่สิ่งนี้ฉันไม่เคยเห็นในการปฏิบัติของฉัน สำหรับข้อมูล: 1 (แรงม้า) \u003d 745.7 (วัตต์)
ประการแรก ผู้เริ่มต้นไม่แนะนำขนาดคอยล์แกนผงเหล็กของตัวเอง ดังนั้นผงเหล็กจึงสูงกว่าเฟอร์ไรท์ ส่งผลให้ขดลวดมีขนาดกะทัดรัดมากขึ้นและมีความจุพลังงานเท่ากัน ไม่ใช่เรื่องแปลกสำหรับผู้เริ่มต้นที่จะทำผิดพลาดในการใช้คอยล์ถัดไปกับตัวเหนี่ยวนำที่เหมาะสมโดยไม่ตรวจสอบให้แน่ใจว่าคอยล์ได้รับการออกแบบเป็นคอยล์ปราบปรามการรบกวนจริง ๆ ตัวอย่างเช่นใน Reichelt โซ่ทำงานได้ค่อนข้างดี แต่ประสิทธิภาพต่ำกว่าคอยล์ที่ดีอยู่มาก
แต่เราสนใจ พลังงานไฟฟ้า, เช่น. พลังงานที่ใช้โดยมอเตอร์จากเครือข่าย พลังงานไฟฟ้าที่ใช้งานจะแสดงเป็น P1 และจะมากกว่าพลังงานกล P2 เสมอเพราะ โดยคำนึงถึงความสูญเสียทั้งหมดของเครื่องยนต์ด้วย
1. ความสูญเสียทางกล (บมจ.)
การสูญเสียทางกลรวมถึงการเสียดสีของแบริ่งและการระบายอากาศ ค่าของมันขึ้นอยู่กับความเร็วของเครื่องยนต์โดยตรงเช่น ยิ่งความเร็วสูงมากเท่าใด การสูญเสียทางกลก็จะยิ่งมากขึ้นเท่านั้น
สาเหตุหลักมาจากการออกแบบขดลวดและแกนที่มีอยู่ บล็อก RFI ได้รับการออกแบบมาให้ส่งผ่านกระแสความถี่ต่ำและเพื่อบล็อกกระแสความถี่ต่ำซึ่งต่ำเมื่อเทียบกับกระแสความถี่สูงที่มีประโยชน์ เป็นผลให้สนามแม่เหล็กคงที่หรือเปลี่ยนแปลงช้ามากเนื่องจากกระแสความถี่ต่ำ ดังนั้นแกนกลางจึงไม่ได้รับการออกแบบสำหรับการสูญเสียต่ำหรือเป็นที่ต้องการหากมีการสูญเสียต่อ ความถี่สูงเพื่อป้องกันเสียงสะท้อนภายในคอยล์
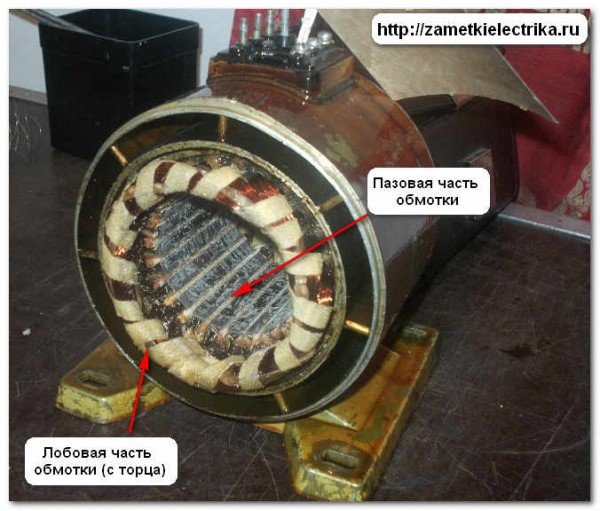
อะซิงโครนัส มอเตอร์สามเฟสด้วยเฟสโรเตอร์ การสูญเสียระหว่างแปรงและแหวนสลิปก็ถูกนำมาพิจารณาด้วย คุณสามารถเรียนรู้เพิ่มเติมเกี่ยวกับการออกแบบมอเตอร์แบบอะซิงโครนัสได้

ดังนั้น คอยล์ที่ออกแบบมาโดยเฉพาะสำหรับการจ่ายไฟแบบสวิตชิ่งมักมีการออกแบบทางกลไกที่เหมาะสม เพื่อรักษาเส้นให้แข็งแรงที่สุดเท่าที่จะเป็นไปได้ภายในหรือใกล้กับขดลวดเพื่อลดการรบกวนนี้
โดยเฉพาะอย่างยิ่งสำหรับแกนคอร์คอยล์ จะต้องตรวจสอบอย่างแน่ชัดว่าข้อมูลถูกนำไปใช้สำหรับแอปพลิเคชั่นปราบปรามการรบกวนหรือสำหรับการจ่ายไฟแบบสวิตชิ่งหรือไม่: ในที่นี้ คอยล์เดียวกันมักจะถูกกำหนดแตกต่างกันไปขึ้นอยู่กับการใช้งานที่ตั้งใจไว้ เนื่องจากแทบไม่มีการสูญเสียแกนกลางระหว่างการใช้การลดเสียงรบกวน และเนื่องจากความร้อนที่ต่ำกว่า ลวดสามารถไหลผ่านกระแสที่สูงขึ้นได้โดยไม่เกิดความร้อนสูงเกินไป
2. การสูญเสียแม่เหล็ก (Рmagn.)
การสูญเสียแม่เหล็กเกิดขึ้นใน "ฮาร์ดแวร์" ของวงจรแม่เหล็ก ซึ่งรวมถึงการสูญเสียฮิสเทรีซิสและกระแสน้ำวนระหว่างการพลิกกลับของแกนกลาง
ขนาดของการสูญเสียแม่เหล็กในสเตเตอร์ขึ้นอยู่กับความถี่ของการกลับตัวเป็นแม่เหล็กของแกนกลาง ความถี่จะคงที่เสมอและเป็น 50 (Hz)

ถังเก็บ: ดีมาก ขดลวดแกน Toroidal ที่เหมาะสม: ขึ้นอยู่กับการใช้งาน ดีถึงดีมาก การออกแบบตัวต้านทาน แกนดรัม: เหมาะสำหรับขดลวดลดพลังงานขนาดเล็ก: โช้กจำกัดกระแสไฟที่ไม่เหมาะสม: ไม่เหมาะสมอย่างยิ่ง คอยล์ที่เหมาะสมสำหรับตัวควบคุมการสลับขนาดเล็กในการกำหนดค่าใดๆ เช่น Reichelt หรือ Konrad หรือคอยส์ที่คล้ายกัน ด้วยแกนเฟอร์ไรท์ คอยส์เหล่านี้จึงเหมาะสำหรับช่วงความถี่เกือบทั้งหมด
การสูญเสียแม่เหล็กในโรเตอร์ขึ้นอยู่กับความถี่ของการทำให้เป็นแม่เหล็กใหม่ของโรเตอร์ ความถี่นี้คือ 2-4 (Hz) และขึ้นอยู่กับปริมาณมอเตอร์สลิปโดยตรง แต่การสูญเสียแม่เหล็กในโรเตอร์มีน้อย ดังนั้นจึงมักไม่นำมาพิจารณาในการคำนวณ

สำหรับตัวควบคุมบั๊กที่สูงถึง 100 kHz โดยเฉพาะอย่างยิ่งที่กระแสที่สูงขึ้น มักจะมีราคาถูกกว่าคอยล์แกนเฟอร์ไรท์ที่คล้ายกันมาก นี่เป็นวิธีง่ายๆในการคำนวณขดลวด เหล่านี้เป็นโช้กสำหรับตัวควบคุมสวิตชิ่งและ/หรือหม้อแปลงสำหรับอินเวอร์เตอร์ หม้อแปลงและคอยล์ด้วย ซึ่งหมายความว่าคุณเพียงแค่คิดหาขดลวดของคุณแล้วพันขดลวด
อย่างไรก็ตาม สำหรับมือสมัครเล่นมักให้ผลลัพธ์ที่น่าพอใจ การพูด ในแง่ง่ายอาจกล่าวได้ว่าความสามารถในการกักเก็บพลังงานของขดลวดถูกกำหนดโดยแกนแม่เหล็ก จำนวนรอบไม่สำคัญ! อย่างไรก็ตาม พลังงานยังคงเท่าเดิม ดังที่แสดงในสูตรต่อไปนี้ ก่อนอื่นคุณต้องคำนวณความจุที่ต้องการ เราจะยกตัวอย่างตัวควบคุมการสลับบูสต์ซึ่งต้องใช้คอยล์ 330uH และ 2.5A มีการคำนวณปริมาณพลังงาน
3. การสูญเสียไฟฟ้าในขดลวดสเตเตอร์ (Re1)
การสูญเสียไฟฟ้าในขดลวดสเตเตอร์เกิดจากการให้ความร้อนจากกระแสที่ไหลผ่าน ยิ่งกระแสมาก ยิ่งโหลดมอเตอร์มากเท่าไหร่ การสูญเสียทางไฟฟ้าก็จะยิ่งมากขึ้นเท่านั้น - ทุกอย่างมีเหตุผล
4. การสูญเสียไฟฟ้าในโรเตอร์ (Re2)
การสูญเสียทางไฟฟ้าในโรเตอร์จะคล้ายกับการสูญเสียในขดลวดสเตเตอร์
5. การสูญเสียเพิ่มเติมอื่น ๆ (Rdob.)
การสูญเสียเพิ่มเติม ได้แก่ ฮาร์โมนิกที่สูงขึ้นของแรงแม่เหล็ก, จังหวะของการเหนี่ยวนำแม่เหล็กในฟัน และอื่นๆ การสูญเสียเหล่านี้เป็นเรื่องยากมากที่จะนำมาพิจารณา ดังนั้นจึงมักจะคิดเป็น 0.5% ของการบริโภค พลังที่ใช้งานป.1
ทุกท่านคงทราบดีว่ามีอะไรอยู่ในเครื่องยนต์ พลังงานไฟฟ้าแปลงเป็นเครื่องกล หากเราอธิบายในรายละเอียดเพิ่มเติม เมื่อจ่ายกำลังไฟฟ้าที่ใช้งาน P1 ให้กับมอเตอร์ บางส่วนจะใช้ไปกับการสูญเสียไฟฟ้าในขดลวดสเตเตอร์และการสูญเสียแม่เหล็กในวงจรแม่เหล็ก จากนั้นพลังงานแม่เหล็กไฟฟ้าที่เหลือจะถูกส่งไปยังโรเตอร์ ซึ่งจะใช้ไปกับการสูญเสียไฟฟ้าในโรเตอร์และแปลงเป็นพลังงานกล กำลังกลบางส่วนลดลงเนื่องจากการสูญเสียทางกลและการสูญเสียเพิ่มเติม เป็นผลให้พลังงานกลที่เหลืออยู่คือกำลัง P2 ที่มีประโยชน์บนเพลามอเตอร์
การสูญเสียทั้งหมดนี้รวมอยู่ในพารามิเตอร์เดียว - สัมประสิทธิ์ การกระทำที่เป็นประโยชน์(ประสิทธิภาพ) ของเครื่องยนต์ซึ่งแสดงด้วยสัญลักษณ์ "η" และถูกกำหนดโดยสูตร:
อย่างไรก็ตาม ประสิทธิภาพจะอยู่ที่ประมาณ 0.75-0.88 สำหรับเครื่องยนต์ที่มีกำลังสูงถึง 10 (kW) และ 0.9-0.94 สำหรับเครื่องยนต์ที่เกิน 10 (kW)
อีกครั้งให้เรากลับไปที่ข้อมูลของเครื่องยนต์ AIR71A4 ที่พิจารณาในบทความนี้
ป้ายชื่อประกอบด้วยข้อมูลต่อไปนี้:
- ประเภทเครื่องยนต์ AIR71A4
- เลขที่โรงงาน XXXXX
- ประเภทของกระแส - ตัวแปร
- จำนวนเฟส - สามเฟส
- ความถี่หลัก 50 (Hz)
- แผนภาพการเชื่อมต่อที่คดเคี้ยว ∆/Y
- แรงดันไฟฟ้า 220/380 (V)
- จัดอันดับปัจจุบันในเดลต้า 2.7 (A) / ในดาว 1.6 (A)
- พิกัดกำลังสุทธิบนเพลา P2 = 0.55 (kW) = 550 (W)
- ความเร็วในการหมุน 1360 (รอบต่อนาที)
- ประสิทธิภาพ 75% (η = 0.75)
- ตัวประกอบกำลัง cosφ = 0.71
- โหมดการทำงาน S1
- ชั้นฉนวนF
- ระดับการป้องกัน IP54
- ชื่อบริษัทและประเทศที่ผลิต
- ปีที่พิมพ์ 2550
การคำนวณกระแสมอเตอร์ที่กำหนด
ก่อนอื่น จำเป็นต้องค้นหาปริมาณการใช้ไฟฟ้าที่ใช้งาน P1 จากเครือข่ายโดยใช้สูตร:
P1 \u003d P2 / η \u003d 550 / 0.75 \u003d 733.33 (W)
ค่ากำลังจะถูกแทนที่ด้วยสูตรในหน่วยวัตต์และแรงดันไฟฟ้าเป็นโวลต์ ประสิทธิภาพ (η) และตัวประกอบกำลัง (cosφ) เป็นปริมาณที่ไม่มีมิติ
แต่นี่ยังไม่พอเพราะเราไม่ได้คำนึงถึงตัวประกอบกำลัง (cosφ ) และมอเตอร์เป็นโหลดแบบแอกทีฟ-อินดัคทีฟ ดังนั้น เพื่อกำหนดการใช้พลังงานทั้งหมดของมอเตอร์จากเครือข่าย เราใช้สูตร:
S = P1/cosφ = 733.33/0.71 = 1032.85 (VA)
ค้นหาพิกัดกระแสของมอเตอร์เมื่อขดลวดเชื่อมต่อกับดาว:
Inom \u003d S / (1.73 U) \u003d 1032.85 / (1.73 380) \u003d 1.57 (A)
ค้นหากระแสไฟที่กำหนดของมอเตอร์เมื่อต่อขดลวดในรูปสามเหลี่ยม:
Inom \u003d S / (1.73 U) \u003d 1032.85 / (1.73 220) \u003d 2.71 (A)
อย่างที่คุณเห็นค่าผลลัพธ์จะเท่ากับกระแสที่ระบุบนแท็กมอเตอร์
เพื่อให้เข้าใจง่ายขึ้น สามารถรวมสูตรข้างต้นเป็นสูตรเดียวได้ ผลลัพธ์จะเป็น:
Inom = P2/(1.73 U cosφ η)
ดังนั้น เพื่อกำหนดกระแสพิกัดมอเตอร์ จำเป็นต้อง สูตรนี้แทนที่พลังงานกล P2 ซึ่งนำมาจากแท็กโดยคำนึงถึงประสิทธิภาพและตัวประกอบกำลัง (cosφ) ซึ่งระบุไว้ในแท็กเดียวกันหรือในหนังสือเดินทางสำหรับมอเตอร์ไฟฟ้า
มาเช็คสูตรกัน
กระแสไฟของมอเตอร์เมื่อขดลวดเชื่อมต่อกับดาว:
Inom \u003d P2 / (1.73 U cosφ η) \u003d 550 / (1.73 380 0.71 0.75) \u003d 1.57 (A)
กระแสไฟของมอเตอร์เมื่อต่อขดลวดในเดลต้า:
Inom \u003d P2 / (1.73 U cosφ η) \u003d 550 / (1.73 220 0.71 0.75) \u003d 2.71 (A)
ฉันหวังว่าทุกอย่างชัดเจน
ตัวอย่าง
ฉันตัดสินใจยกตัวอย่างเพิ่มเติมเกี่ยวกับเครื่องยนต์และความสามารถประเภทต่างๆ เราคำนวณกระแสที่ได้รับการจัดอันดับและเปรียบเทียบกับกระแสที่ระบุบนแท็ก
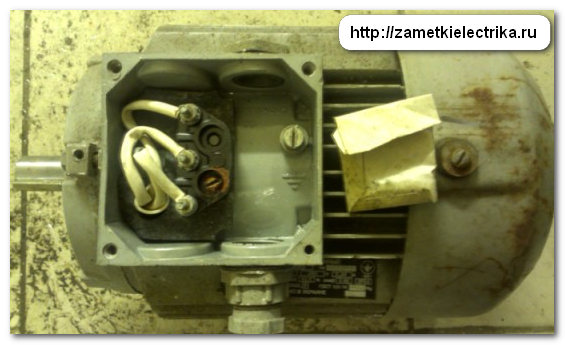
อย่างที่คุณเห็น มอเตอร์นี้สามารถเชื่อมต่อกับเครือข่ายสามเฟสที่มีแรงดันไฟฟ้า 380 (V) เท่านั้นเพราะ ขดลวดของมันถูกประกอบเป็นดาวภายในมอเตอร์และมีเพียงสามปลายเท่านั้นที่ถูกนำออกไปที่แผงขั้วต่อ ดังนั้น:
Inom \u003d P2 / (1.73 U cosφ η) \u003d 1500 / (1.73 380 0.85 0.82) \u003d 3.27 (A)
กระแสที่ได้คือ 3.27 (A) สอดคล้องกับกระแสไฟที่กำหนดที่ 3.26 (A) ที่ระบุบนแท็ก


มอเตอร์นี้สามารถเชื่อมต่อกับเครือข่ายสามเฟสที่มีแรงดันไฟฟ้าทั้ง 380 (V) และรูปสามเหลี่ยม 220 (V) เนื่องจาก มี 6 ปลายในแผงขั้วต่อ:
Inom \u003d P2 / (1.73 U cosφ η) \u003d 3000 / (1.73 380 0.83 0.83) \u003d 6.62 (A) - ดาว
Inom \u003d P2 / (1.73 U cosφ η) \u003d 3000 / (1.73 220 0.83 0.83) \u003d 11.44 (A) - สามเหลี่ยม
ค่าปัจจุบันที่ได้รับสำหรับรูปแบบการเชื่อมต่อที่คดเคี้ยวต่างกันสอดคล้องกับกระแสที่ระบุบนแท็ก
3. มอเตอร์แบบอะซิงโครนัส AIRS100A4 กำลัง 4.25 (kW)


ในทำนองเดียวกันก่อนหน้านี้
Inom \u003d P2 / (1.73 U cosφ η) \u003d 4250 / (1.73 380 0.78 0.82) \u003d 10.1 (A) - ดาว
Inom \u003d P2 / (1.73 U cosφ η) \u003d 4250 / (1.73 220 0.78 0.82) \u003d 17.45 (A) - สามเหลี่ยม
ค่าที่คำนวณได้ของกระแสสำหรับรูปแบบการเชื่อมต่อที่คดเคี้ยวที่แตกต่างกันนั้นสอดคล้องกับกระแสที่ระบุบนแผ่นป้ายของมอเตอร์


มอเตอร์นี้สามารถเชื่อมต่อกับเครือข่ายสามเฟสที่มีแรงดันไฟฟ้า 6 (kV) เท่านั้น รูปแบบการเชื่อมต่อของขดลวดเป็นดาว
Inom \u003d P2 / (1.73 U cosφ η) \u003d 630000 / (1.73 6000 0.86 0.947) \u003d 74.52 (A)
พิกัดกระแส 74.52 (A) สอดคล้องกับพิกัดกระแส 74.5 (A) ที่ระบุบนแท็ก
ส่วนที่เพิ่มเข้าไป
แน่นอนว่าสูตรข้างต้นนั้นดีและการคำนวณนั้นแม่นยำกว่า แต่มีสูตรที่ง่ายกว่าและใกล้เคียงกว่าสำหรับการคำนวณกระแสมอเตอร์ที่ได้รับการจัดอันดับในคนทั่วไป ซึ่งใช้กันอย่างแพร่หลายในหมู่ช่างฝีมือและช่างฝีมือประจำบ้าน
ทุกอย่างเรียบง่าย ใช้กำลังเครื่องยนต์เป็นกิโลวัตต์ที่ระบุบนแท็กแล้วคูณด้วย 2 - คุณจะได้ผลลัพธ์ที่ได้ เฉพาะเอกลักษณ์นี้เท่านั้นที่เกี่ยวข้องกับมอเตอร์ 380 (B) ที่ประกอบเป็นดาว คุณสามารถตรวจสอบและเพิ่มพลังของเครื่องยนต์ข้างต้นได้ แต่โดยส่วนตัวแล้ว ฉันยืนยันว่าคุณใช้วิธีการคำนวณที่แม่นยำยิ่งขึ้น
ป.ล. และตอนนี้ ตามที่เราได้ตัดสินใจเกี่ยวกับกระแสแล้ว เราสามารถเลือกเบรกเกอร์วงจร ฟิวส์ การป้องกันความร้อนของมอเตอร์และคอนแทคเตอร์สำหรับการควบคุมได้ ฉันจะบอกคุณเกี่ยวกับเรื่องนี้ในโพสต์ถัดไปของฉัน เพื่อไม่ให้พลาดการเปิดตัวบทความใหม่ โปรดสมัครรับจดหมายข่าวของเว็บไซต์ Electrician's Notes แล้วพบกันใหม่.