หลักการทำงานของมอเตอร์เหนี่ยวนำขึ้นอยู่กับการใช้สนามแม่เหล็กหมุนและกฎพื้นฐานของวิศวกรรมไฟฟ้า
เมื่อมอเตอร์เชื่อมต่อกับเครือข่ายกระแสไฟสามเฟส สนามแม่เหล็กที่มีขนาดคงที่ แต่หมุนในอวกาศ จะเกิดขึ้นในสเตเตอร์ ซึ่งเป็นเส้นของแรงที่ตัดกับการหมุนของขดลวดโรเตอร์ ในกรณีนี้ ตามกฎของการเหนี่ยวนำแม่เหล็กไฟฟ้า EMF จะถูกเหนี่ยวนำในขดลวดของโรเตอร์ ซึ่งค่าจะเป็นสัดส่วนกับความถี่ของทางแยก เส้นแรง. ภายใต้การกระทำของ EMF ที่เหนี่ยวนำให้เกิดกระแสที่สำคัญเกิดขึ้นในโรเตอร์กรงกระรอก
ตามกฎของแอมแปร์ ตัวนำที่นำพากระแสในสนามแม่เหล็กอยู่ภายใต้แรงทางกล ซึ่งตามหลักการของเลนซ์ มักจะกำจัดสาเหตุที่ทำให้เกิดกระแสเหนี่ยวนำ กล่าวคือ จุดตัดของแกนหมุนของโรเตอร์โดยเส้นแรงของสนามหมุน ดังนั้นแรงทางกลที่เกิดขึ้นจะหมุนโรเตอร์ไปในทิศทางของการหมุนของสนาม ซึ่งลดความเร็วของการข้ามแท่งของขดลวดโรเตอร์ด้วยเส้นแรงแม่เหล็ก
โรเตอร์ไม่สามารถเข้าถึงความถี่การหมุนของสนามในสภาพจริงได้ เนื่องจากจากนั้นแท่งของขดลวดจะอยู่กับที่เมื่อเทียบกับเส้นแรงแม่เหล็กและกระแสเหนี่ยวนำในขดลวดของโรเตอร์จะหายไป ดังนั้นโรเตอร์จะหมุนที่ความถี่ต่ำกว่าความถี่การหมุนภาคสนาม กล่าวคือ ไม่ตรงกับสนามหรือ แบบอะซิงโครนัส.
ในการเปลี่ยนทิศทางการหมุนของโรเตอร์ของมอเตอร์แบบอะซิงโครนัส จำเป็นต้องเปลี่ยนทิศทางการหมุนของสนามแม่เหล็ก กล่าวคือ เปลี่ยนลำดับเฟสของขดลวดสเตเตอร์โดยสลับสายไฟสองในสามเฟสที่จ่ายให้กับมอเตอร์
ความถี่การหมุนของสนามแม่เหล็ก น 1 (ความเร็วซิงโครนัส) ขึ้นอยู่กับความถี่อย่างเคร่งครัด ฉ 1 แรงดันไฟฟ้าขาเข้าและจำนวนคู่ขั้ว พีเครื่องยนต์: น 1 = 60ฉ 1 /พี.
จากนี้ไปจากความถี่อุตสาหกรรมของแรงดันไฟฟ้าที่ใช้ในรัสเซีย ( ฉ 1 \u003d 50 Hz) จำนวนรอบสูงสุดของสนามแม่เหล็กจะกลายเป็น 3000 รอบต่อนาทีที่ พี= 1 ด้วยการเพิ่มจำนวนคู่ของขั้ว ความถี่ของการหมุนของสนามแม่เหล็กจะลดลง และด้วยเหตุนี้ ความถี่ของการหมุนของโรเตอร์ก็ลดลงเช่นกัน ที่ พี= 2,น= 1500 รอบต่อนาที เป็นต้น
หากแรงที่ทำให้การหมุนของโรเตอร์ช้าลงมีขนาดเล็ก แสดงว่าโรเตอร์จะหมุนด้วยความถี่ที่ใกล้เคียงกับความถี่ของการหมุนของสนาม เมื่อโหลดบนเพลามอเตอร์เพิ่มขึ้น ความเร็วของโรเตอร์จะลดลง กระแสในการหมุนของขดลวดจะเพิ่มขึ้น ซึ่งทำให้แรงบิดของมอเตอร์เพิ่มขึ้น ที่ความเร็วของโรเตอร์ระดับหนึ่ง จะเกิดความสมดุลระหว่าง เบรคและแรงบิด
ความเร็วสลิปและโรเตอร์
แสดงโดย น 2 ความเร็วโรเตอร์ของมอเตอร์แบบอะซิงโครนัสและผ่าน น 1 ความถี่การหมุนของสนามแม่เหล็ก ในส่วนที่แล้วแสดงให้เห็นว่า น 2 <น 1 .
ความถี่ของการหมุนของสนามแม่เหล็กที่สัมพันธ์กับโรเตอร์คือ ความแตกต่าง น 1 –น 2 เรียกว่า เลื่อน. สลิปมักจะแสดงเป็นเศษส่วนของความถี่การหมุนสนามและแสดงด้วยสัญลักษณ์ ส:
ส = (น 1 – น 2)/ น 1 .
สลิปขึ้นอยู่กับโหลดบนเพลามอเตอร์ ที่พิกัดโหลด ค่าของมันคือประมาณ 0.05 สำหรับเครื่องจักรขนาดเล็ก และประมาณ 0.02 สำหรับเครื่องยนต์ที่ทรงพลัง
จากความเท่าเทียมกันข้างต้น เราสามารถหาความสัมพันธ์ได้อย่างง่ายดาย: น 2 =น 1 (1 –ส). และหลังจากการแปลงอย่างง่าย เราได้นิพจน์สำหรับความถี่ของเครื่องยนต์ สะดวกสำหรับการให้เหตุผลเพิ่มเติม: น 2 = 60ฉ 1 (1 ‑ส)/พี.
เนื่องจากสลิปมีขนาดเล็กในระหว่างการทำงานของมอเตอร์ปกติ ความเร็วของมอเตอร์จึงแตกต่างจากความเร็วภาคสนามเพียงเล็กน้อย
ในทางปฏิบัติ สลิปมักแสดงเป็นเปอร์เซ็นต์:
ข = 100 (น 1 – น 2)/ น 1 .
มอเตอร์แบบอะซิงโครนัสส่วนใหญ่มีการลื่นในช่วง 2-6%
สลิปเป็นหนึ่งในคุณสมบัติที่สำคัญที่สุดของเครื่องยนต์ EMF และกระแสของโรเตอร์, แรงบิด, ความเร็วของโรเตอร์จะแสดงออกมา
เมื่ออยู่กับที่ ( น 2 = 0) โรเตอร์ ส= 1 มอเตอร์มีสลิปดังกล่าวในขณะที่สตาร์ท
ตามที่ระบุไว้แล้วการลื่นขึ้นอยู่กับโมเมนต์ของการโหลดบนเพลามอเตอร์ ดังนั้นความเร็วของโรเตอร์จึงขึ้นอยู่กับแรงบิดในการเบรกบนเพลาด้วย จัดอันดับความเร็วโรเตอร์ น 2,nom สอดคล้องกับค่าที่คำนวณได้ของโหลด เอ็ม n, ความถี่ ฉ 1,nom และแรงดันไฟหลัก ยู 1,nom ถูกระบุไว้บนแผ่นป้ายที่ติดอยู่กับตัวมอเตอร์แบบอะซิงโครนัส
ความเร็วมอเตอร์เหนี่ยวนำ
n \u003d n 1 (1 - s) \u003d (60f 1 / p) (1-s) (85)
จากนิพจน์นี้จะเห็นได้ว่าสามารถปรับได้โดยการเปลี่ยนความถี่ f1แรงดันไฟ จำนวนเสาคู่ Rและ
สลิป หลังตามค่าที่กำหนดของโมเมนต์บนเพลา M ต่อและความถี่ f 1 สามารถเปลี่ยนได้โดยการรวมรีโอสแตตในวงจรขดลวดของโรเตอร์
ระเบียบโดยการเปลี่ยนความถี่ของแรงดันไฟฟ้าวิธีนี้ต้องใช้เครื่องแปลงความถี่ซึ่งต้องเชื่อมต่อมอเตอร์แบบอะซิงโครนัส บนพื้นฐานของวาล์วเซมิคอนดักเตอร์ที่ควบคุม (ไทริสเตอร์) ตัวแปลงความถี่คงที่ได้ถูกสร้างขึ้นและมีการสร้างตู้รถไฟไฟฟ้าและดีเซลรุ่นทดลองจำนวนหนึ่งที่มีมอเตอร์แบบอะซิงโครนัสซึ่งความเร็วในการหมุนจะถูกควบคุมโดยการเปลี่ยนความถี่ของแรงดันไฟฟ้า วิธีการควบคุมความเร็วโรเตอร์ของมอเตอร์เหนี่ยวนำนี้มีแนวโน้มที่ดี
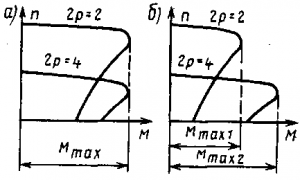
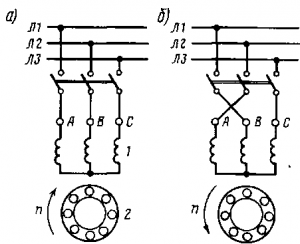
ระเบียบโดยการเปลี่ยนจำนวนเสาคู่วิธีนี้ช่วยให้คุณเปลี่ยนความเร็วได้ทีละขั้น เพื่อจุดประสงค์นี้ แต่ละขดลวด 1, 2 และ 3, 4 ซึ่งประกอบเป็นหนึ่งเฟส (รูปที่ 266) จะถูกเปลี่ยนเพื่อให้ทิศทางของกระแสในพวกมันเปลี่ยนไปตามนั้น (ตัวอย่างเช่น จากการเชื่อมต่อแบบพยัญชนะต่อเนื่องเป็นตรงกันข้าม หนึ่ง). ด้วยการรวมพยัญชนะของขดลวด (รูปที่ 266, a) จำนวนเสาคือสี่โดยมีการรวมที่ตรงกันข้าม (รูปที่ 266, b) - สอง ขดลวดของอีกสองเฟสซึ่งขยับในอวกาศ 120 °เชื่อมต่อในลักษณะเดียวกัน การลดจำนวนขั้วสามารถทำได้โดยการเปลี่ยนขดลวดจากการเชื่อมต่อแบบอนุกรมเป็นการเชื่อมต่อแบบขนาน เมื่อจำนวนขั้วเปลี่ยนแปลง ความเร็วในการหมุน n 1 ของสนามแม่เหล็กของมอเตอร์จะเปลี่ยนไป ด้วยเหตุนี้ ความเร็วในการหมุน n ของโรเตอร์ หากคุณต้องการความเร็วสามหรือสี่ n 1 ขดลวดอีกอันจะถูกวางบนสเตเตอร์เมื่อสลับซึ่งคุณจะได้รับความถี่เพิ่มอีกสองความถี่ มีเครื่องยนต์ที่ให้การเปลี่ยนแปลงความเร็ว n 1 ที่แรงบิดสูงสุดคงที่หรือกำลังคงที่โดยประมาณ (รูปที่ 267)
ในมอเตอร์แบบอะซิงโครนัส จำนวนขั้วของโรเตอร์ต้องเท่ากับจำนวนเสาสเตเตอร์ ในโรเตอร์กรงกระรอก เงื่อนไขนี้จะเป็นไปตามอัตโนมัติและไม่จำเป็นต้องมีการเปลี่ยนแปลงในขดลวดโรเตอร์เมื่อเปลี่ยนขดลวดสเตเตอร์

ในมอเตอร์ที่มีเฟสโรเตอร์ ในกรณีนี้ จำเป็นต้องเปลี่ยนจำนวนขั้วของขดลวดโรเตอร์ ซึ่งจะทำให้การออกแบบซับซ้อนมาก ดังนั้น วิธีการควบคุมความเร็วนี้จึงใช้เฉพาะในมอเตอร์ที่มีโรเตอร์แบบกรงกระรอก . เครื่องยนต์ดังกล่าวมีขนาดและน้ำหนักโดยรวมที่มากเมื่อเทียบกับเครื่องยนต์เอนกประสงค์ จึงมีต้นทุนสูง นอกจากนี้ กฎระเบียบยังดำเนินการเป็นขั้นตอนใหญ่ ที่ความถี่ f 1 = 50 Hz ความถี่ของการหมุนของสนาม n 1 ระหว่างการสลับจะเปลี่ยนในอัตราส่วน 3000:1500:1000:750
การควบคุมโดยการรวมลิโน่ไว้ในวงจรโรเตอร์เมื่อลิโน่ที่มีความต้านทานต่างกันรวมอยู่ในวงจรขดลวดของโรเตอร์ (R p4, R pZ, R p2 ฯลฯ ) เราจะได้รับคุณสมบัติทางกลที่ไม่คงที่จำนวน 4, 3 และ 2 ของเครื่องยนต์ ในกรณีนี้ โมเมนต์โหลดที่แน่นอน M ชื่อ (รูปที่ 268) จะสอดคล้องกับความเร็วที่ต่ำกว่า n 4, n 3, n 2 เป็นต้น มากกว่าความถี่ n e เมื่อเครื่องยนต์ทำงานในลักษณะธรรมชาติ 1 (ที่ R p \ u003d 0). วิธีการควบคุมนี้ใช้ได้กับมอเตอร์สลิปแหวนเท่านั้น ช่วยให้คุณเปลี่ยนความเร็วได้อย่างราบรื่นในช่วงกว้าง ข้อเสียของมันคือการสูญเสียพลังงานจำนวนมากในการปรับ rheostat ดังนั้นจึงใช้สำหรับโหมดการทำงานของเครื่องยนต์ระยะสั้นเท่านั้น (เมื่อสตาร์ทเครื่อง ฯลฯ )
เปลี่ยนทิศทางการหมุนในการเปลี่ยนทิศทางการหมุนของมอเตอร์ จำเป็นต้องเปลี่ยนทิศทางการหมุนของสนามแม่เหล็กที่เกิดจากขดลวดสเตเตอร์ ทำได้โดยการเปลี่ยนลำดับการสลับกระแสในระยะของขดลวดสเตเตอร์ ตัวอย่างเช่นหากค่าสูงสุดในปัจจุบันเข้าสู่เฟสของขดลวดสเตเตอร์ 1 (รูปที่ 269, a) ตามลำดับต่อไปนี้: เฟส A - เฟส B - เฟส C จากนั้นโรเตอร์ 2 ของเครื่องยนต์จะหมุนตามเข็มนาฬิกา อย่างไรก็ตาม หากป้อนตามลำดับต่อไปนี้: เฟส B - เฟส A - เฟส C จากนั้นโรเตอร์จะเริ่มหมุนทวนเข็มนาฬิกา เพื่อจุดประสงค์นี้ จำเป็นต้องเปลี่ยนรูปแบบการเชื่อมต่อของขดลวดสเตเตอร์กับเครือข่ายโดยสลับสองเฟส (สายไฟ) ตัวอย่างเช่น ขั้ว A ของขดลวดสเตเตอร์ซึ่งก่อนหน้านี้เชื่อมต่อกับสาย L1 จะต้องเปลี่ยนเป็นสาย L2 และขั้ว B ของขดลวดนี้ซึ่งก่อนหน้านี้เชื่อมต่อกับ L2 จะต้องเปลี่ยนเป็นสาย L1 (รูปที่ 269 ข) สวิตช์ดังกล่าวสามารถทำได้ด้วยสวิตช์ทั่วไป
มอเตอร์ไฟฟ้า มอเตอร์แบบอะซิงโครนัส
มอเตอร์แบบอะซิงโครนัสเรียกว่า เครื่องจักรไฟฟ้า ซึ่งมีขดลวดอย่างน้อย 2 เส้น โดยที่แรงดันไฟสลับจะเปลี่ยนเฟสสัมพันธ์กัน
หลักการทำงาน
ในระบบอะซิงโครนัส สามารถสร้างสนามแม่เหล็กหมุนได้ในอุปกรณ์ที่อยู่กับที่ ขดลวดที่เชื่อมต่อกับแหล่งกำเนิดกระแสสลับจะสร้างสนามแม่เหล็กที่เร้าใจ นั่นคือสนามแม่เหล็กที่เปลี่ยนแปลงค่าและทิศทาง
ข้าว. 16.6. การเชื่อมต่อคอยล์มอเตอร์กับแหล่งจ่ายแรงดันไฟสามเฟส
ข้าว. 16.7. กราฟการเปลี่ยนแปลงกระแสของระบบสามเฟส
ในกระบอกสูบที่มีเส้นผ่านศูนย์กลางภายใน D จะมีขดลวดสามขดลวดวางอยู่บนพื้นผิว โดยจะเคลื่อนที่สัมพันธ์กันในเชิงพื้นที่ 120 องศา ขดลวดเชื่อมต่อกับแหล่งจ่ายแรงดันไฟสามเฟส (รูปที่ 16.6) ในรูป 16.7 แสดงกราฟของกระแสชั่วขณะที่สร้างระบบสามเฟส
ขดลวดแต่ละอันสร้างสนามแม่เหล็กที่เต้นเป็นจังหวะ สนามแม่เหล็กของขดลวดซึ่งมีปฏิสัมพันธ์ซึ่งกันและกันทำให้เกิดสนามแม่เหล็กที่หมุนได้ซึ่งมีลักษณะเป็นเวกเตอร์ของการเหนี่ยวนำแม่เหล็กที่เกิดขึ้น
ในรูป 16.8 แสดงเวกเตอร์การเหนี่ยวนำแม่เหล็กของแต่ละเฟสและเวกเตอร์ผลลัพธ์ สร้างขึ้นสามครั้ง t 1, t 2, t 3 ทิศทางบวกของแกนของขดลวดจะถูกทำเครื่องหมาย +1, +2, +3
ในขณะนี้ เสื้อ \u003d เสื้อ 1 การเหนี่ยวนำกระแสและแม่เหล็กในขดลวด A-X เป็นค่าบวกและค่าสูงสุดในขดลวด B-Y และ C-Z มีค่าเท่ากันและเป็นลบ เวกเตอร์ของการเหนี่ยวนำแม่เหล็กที่ได้จะเท่ากับผลรวมทางเรขาคณิตของเวกเตอร์ของการเหนี่ยวนำแม่เหล็กของขดลวดและเกิดขึ้นพร้อมกับแกนของขดลวด A-X ในขณะนี้ เสื้อ \u003d เสื้อ 2 กระแสในขดลวด A-X และ C-Z มีขนาดเท่ากันและมีทิศทางตรงกันข้าม กระแสในเฟส B เป็นศูนย์ เวกเตอร์การเหนี่ยวนำแม่เหล็กที่ได้จะหมุนตามเข็มนาฬิกาไป 30°
ข้าว. 16.8. เวกเตอร์ของการเหนี่ยวนำแม่เหล็กเป็นเวลาสามช่วงเวลา
ในขณะนี้ t \u003d t 3 กระแสในขดลวด A-X และ B-Y มีขนาดและค่าบวกเท่ากัน กระแสในเฟส C-Z มีค่าสูงสุดและค่าลบ เวกเตอร์ของสนามแม่เหล็กที่ได้จะอยู่ในทิศทางลบของ แกนคอยล์ C-Z ในช่วงเวลาของกระแสสลับ เวกเตอร์ของสนามแม่เหล็กที่ได้จะหมุน 360° ความเร็วเชิงเส้นของการเคลื่อนที่ของเวกเตอร์การเหนี่ยวนำแม่เหล็ก
ความถี่ของแรงดันไฟฟ้าสลับอยู่ที่ไหน T คือคาบของกระแสไซน์ pg - ความถี่การหมุนของสนามแม่เหล็กหรือความถี่การหมุนซิงโครนัส สำหรับคาบ T สนามแม่เหล็กจะเคลื่อนที่เป็นระยะทางโดยที่
การแบ่งขั้วหรือระยะห่างระหว่างขั้วของแม่เหล็ก
สนามตามเส้นรอบวงของทรงกระบอกที่มีเส้นผ่านศูนย์กลาง D.
ความเร็วเชิงเส้นจาก
โดยที่ n 1 - ความถี่ซิงโครนัสของการหมุนของสนามแม่เหล็กหลายขั้วพร้อมจำนวนขั้วคู่ R
ขดลวดที่แสดงในรูปที่ 16.6 สร้างสนามแม่เหล็กสองขั้วด้วยจำนวนขั้ว 2P = 2 ความถี่การหมุนของสนามคือ 3000 รอบต่อนาที เพื่อให้ได้สนามแม่เหล็กสี่ขั้ว จำเป็นต้องวางขดลวดหกเส้นในกระบอกสูบที่มีเส้นผ่านศูนย์กลาง D สองอันสำหรับแต่ละเฟส จากนั้นตามสูตร (16.7) สนามแม่เหล็กจะหมุนช้าเป็นสองเท่าโดยที่ n 1 = 1500 rpm
เพื่อให้ได้สนามแม่เหล็กที่หมุนได้ จะต้องเป็นไปตามเงื่อนไขสองประการ:
- เงื่อนไขที่ 1 - ต้องมีขดลวดเคลื่อนที่อย่างน้อยสองตัว
- เงื่อนไขที่ 2 - เชื่อมต่อกระแสนอกเฟสกับคอยส์
ออกแบบ
มอเตอร์เหนี่ยวนำมีส่วนคงที่ที่เรียกว่าสเตเตอร์และส่วนที่หมุนเรียกว่าโรเตอร์ สเตเตอร์ประกอบด้วยขดลวดที่สร้างสนามแม่เหล็กหมุน มีมอเตอร์แบบอะซิงโครนัสที่มีกรงกระรอกและเฟสโรเตอร์ ในร่องของโรเตอร์ด้วย ขดลวดลัดวงจรวางแท่งอลูมิเนียมหรือทองแดง ที่ปลายแท่งปิดด้วยวงแหวนอลูมิเนียมหรือทองแดง สเตเตอร์และโรเตอร์ทำจากแผ่นเหล็กไฟฟ้าเพื่อลดการสูญเสียของกระแสวน เฟสโรเตอร์มีขดลวดสามเฟส (สำหรับ มอเตอร์สามเฟส). ปลายของเฟสเชื่อมต่อกันเป็นโหนดทั่วไป และจุดเริ่มต้นจะถูกนำออกมาเป็นวงแหวนสัมผัสสามวงที่วางอยู่บนเพลา วางแปรงสัมผัสคงที่ไว้บนวงแหวน รีโอสแตทเริ่มต้นเชื่อมต่อกับแปรง หลังจากสตาร์ทเครื่องยนต์ ความต้านทานของรีโอสแตตสตาร์ทจะค่อยๆ ลดลงจนเหลือศูนย์
หลักการทำงานของมอเตอร์เหนี่ยวนำ
หลักการทำงานของมอเตอร์แบบอะซิงโครนัสจะได้รับการพิจารณาในรุ่นที่แสดงในรูปที่ 16.9.
เราเป็นตัวแทนของสนามแม่เหล็กหมุนของสเตเตอร์ในฐานะแม่เหล็กถาวรที่หมุนด้วยความถี่การหมุนแบบซิงโครนัส u กระแสถูกเหนี่ยวนำในตัวนำของขดลวดปิดของโรเตอร์ ขั้วของแม่เหล็กเคลื่อนที่ตามเข็มนาฬิกา สำหรับผู้สังเกตที่วางบนแม่เหล็กหมุน ดูเหมือนว่าแม่เหล็กอยู่กับที่และตัวนำ ไขลานเลื่อนทวนเข็มนาฬิกา ทิศทางของกระแสโรเตอร์ที่กำหนดโดยกฎมือขวา แสดงในรูปที่ 16.9.

ข้าว. 16.9. รุ่นมอเตอร์เหนี่ยวนำ
เมื่อใช้กฎมือซ้าย เราจะค้นหาทิศทางของแรงแม่เหล็กไฟฟ้าที่กระทำต่อโรเตอร์และทำให้หมุนได้ โรเตอร์มอเตอร์จะหมุนด้วยความเร็ว n 1 ในทิศทางการหมุนของสนามสเตเตอร์ โรเตอร์หมุนแบบอะซิงโครนัส นั่นคือ ความถี่การหมุน n 2 น้อยกว่าความถี่การหมุนของสนามสเตเตอร์ w ความแตกต่างสัมพัทธ์ระหว่างความเร็วของสนามสเตเตอร์และโรเตอร์เรียกว่าสลิป:
สลิปไม่สามารถเท่ากับศูนย์ได้ เนื่องจากที่ความเร็วเท่ากันของสนามและโรเตอร์ การเหนี่ยวนำกระแสในโรเตอร์จะหยุดลง ดังนั้นจึงไม่มีแรงบิดแม่เหล็กไฟฟ้า
แรงบิดแม่เหล็กไฟฟ้าแบบหมุนจะสมดุลโดยแรงบิดเบรกตรงข้ามกับภาระที่เพิ่มขึ้นบนเพลามอเตอร์แรงบิดในการเบรกจะมากกว่าแรงบิดในการหมุนและการลื่นเพิ่มขึ้น เป็นผลให้ EMF และกระแสเหนี่ยวนำในการหมุนของโรเตอร์เพิ่มขึ้น แรงบิดเพิ่มขึ้นและเท่ากับแรงบิดเบรก แรงบิดจะเพิ่มขึ้นตามการลื่นที่เพิ่มขึ้นจนถึงค่าสูงสุด หลังจากนั้นเมื่อแรงบิดเบรกเพิ่มขึ้น แรงบิดจะลดลงอย่างรวดเร็วและมอเตอร์จะหยุดทำงาน
หากสลิปของมอเตอร์จนตรอกเท่ากับหนึ่ง แสดงว่ามอเตอร์อยู่ในโหมดลัดวงจร ความเร็วในการหมุนของมอเตอร์เหนี่ยวนำที่ไม่ได้บรรจุ n 2 นั้นเท่ากับความถี่ซิงโครนัสโดยประมาณ n 1 .
หากสลิปของเครื่องยนต์ที่ไม่ได้บรรจุคือ S = 0 แสดงว่าเครื่องยนต์เดินเบา
สลิปของเครื่องอะซิงโครนัสที่ทำงานในโหมดมอเตอร์แตกต่างกันไปจากศูนย์ถึงหนึ่ง เครื่องอะซิงโครนัสสามารถทำงานในโหมดเครื่องกำเนิดไฟฟ้า ในการทำเช่นนี้โรเตอร์จะต้องหมุนด้วยมอเตอร์ของบุคคลที่สามในทิศทางการหมุนของสนามแม่เหล็กสเตเตอร์ด้วยความถี่ n 2 > n 1 . ลื่น เครื่องกำเนิดไฟฟ้าแบบอะซิงโครนัสส< 0.
เครื่องอะซิงโครนัสสามารถทำงานในโหมดเบรกเครื่องไฟฟ้า ในการทำเช่นนี้จำเป็นต้องหมุนโรเตอร์ไปในทิศทางตรงกันข้ามกับทิศทางการหมุนของสนามแม่เหล็กสเตเตอร์ ในโหมดนี้ S > 1
ตามกฎแล้วจะใช้เครื่องจักรแบบอะซิงโครนัสในโหมดมอเตอร์ มอเตอร์เหนี่ยวนำเป็นมอเตอร์ชนิดที่พบมากที่สุดในอุตสาหกรรม ความถี่ของการหมุนของสนามในมอเตอร์แบบอะซิงโครนัสนั้นสัมพันธ์กับความถี่ของเครือข่าย f 1 และจำนวนคู่ของเสาสเตเตอร์
ที่ความถี่ f 1 = 50 Hz มีดังต่อไปนี้ ช่วงความเร็ว(P - n 1, รอบต่อนาที):
จากสูตร (16.7) เราได้รับ
ความเร็วของสนามสเตเตอร์ที่สัมพันธ์กับโรเตอร์เรียกว่าความเร็วสลิป
![]()
ความถี่ปัจจุบันและ EMF ในขดลวดโรเตอร์

เครื่องอะซิงโครนัสล็อคโรเตอร์ทำงานเหมือนหม้อแปลงไฟฟ้า ฟลักซ์แม่เหล็กหลักเหนี่ยวนำให้เกิดในสเตเตอร์และในขดลวดโรเตอร์คงที่ EMF E 1 และ E 2K:

โดยที่Ф m - ค่าสูงสุดของฟลักซ์แม่เหล็กหลักควบคู่กับขดลวดสเตเตอร์และโรเตอร์ W 1 และ W 2 - จำนวนรอบของขดลวดสเตเตอร์และโรเตอร์ - ความถี่แรงดันไฟฟ้าในเครือข่าย K 01 และ K 02 - ค่าสัมประสิทธิ์การพันของขดลวดสเตเตอร์และโรเตอร์
เพื่อให้ได้การกระจายตัวที่ดียิ่งขึ้นของการเหนี่ยวนำแม่เหล็กในช่องว่างอากาศระหว่างสเตเตอร์และโรเตอร์ ขดลวดสเตเตอร์และโรเตอร์จะไม่กระจุกตัวอยู่ภายในขั้วเดียว แต่กระจายไปตามเส้นรอบวงของสเตเตอร์และโรเตอร์ EMF ของขดลวดแบบกระจายจะน้อยกว่า EMF ของขดลวดแบบก้อน ความจริงข้อนี้ถูกนำมาพิจารณาโดยการแนะนำค่าสัมประสิทธิ์การม้วนงอในสูตรที่กำหนดขนาดของแรงเคลื่อนไฟฟ้าของขดลวด ค่าสัมประสิทธิ์การคดเคี้ยวน้อยกว่าความสามัคคีเล็กน้อย EMF ในการหมุนของโรเตอร์หมุน
กระแสไฟของโรเตอร์ของเครื่องทำงาน
โดยที่ R 2 - ความต้านทานที่ใช้งานโรเตอร์ที่คดเคี้ยว; x 2 - ความต้านทานอุปนัยของขดลวดโรเตอร์
โดยที่ x 2K คือค่ารีแอกแตนซ์อุปนัยของโรเตอร์ที่ถูกล็อก แล้ว
มอเตอร์แบบเฟสเดียวมีหนึ่งขดลวดที่อยู่บนสเตเตอร์ ขดลวดเฟสเดียวขับเคลื่อน กระแสสลับจะสร้างสนามแม่เหล็กที่เร้าใจ ให้เราวางโรเตอร์ที่มีขดลวดลัดวงจรในฟิลด์นี้ โรเตอร์จะไม่หมุน หากคุณหมุนโรเตอร์ด้วยแรงกลไกของบุคคลที่สามในทุกทิศทาง เครื่องยนต์จะทำงานได้อย่างเสถียร สามารถอธิบายได้ดังนี้
สนามแม่เหล็กที่เร้าใจสามารถแทนที่ด้วยสอง สนามแม่เหล็ก, หมุนไปในทิศทางตรงกันข้ามด้วยความถี่ซิงโครนัส n1 และมีแอมพลิจูดของฟลักซ์แม่เหล็กเท่ากับครึ่งหนึ่งของแอมพลิจูดของฟลักซ์แม่เหล็กของสนามเร้าใจ สนามแม่เหล็กหนึ่งเรียกว่าการหมุนไปข้างหน้า อีกสนามแม่เหล็กหนึ่งเรียกว่าการหมุนย้อนกลับ สนามแม่เหล็กแต่ละแห่งทำให้เกิดกระแสน้ำวนในขดลวดของโรเตอร์ เมื่อกระแสน้ำวนทำปฏิกิริยากับสนามแม่เหล็ก แรงบิดจะก่อตัวขึ้นในทิศทางตรงกันข้ามกัน ในรูป 16.10 แสดงการขึ้นต่อกันของโมเมนต์บนฟิลด์ไปข้างหน้า M " โมเมนต์บนฟิลด์ย้อนกลับ M" และโมเมนต์ผลลัพธ์ M ในฟังก์ชันสลิป M \u003d M "- M"
ข้าว. 16.10. การพึ่งพาโมเมนต์ของสนามตรง ฟิลด์ย้อนกลับ และโมเมนต์ผลลัพธ์บนสลิป
แกนเลื่อนจะอยู่ตรงข้ามกัน ในโหมดเริ่มต้น โรเตอร์จะอยู่ภายใต้แรงบิดที่มีขนาดเท่ากันและในทิศทางตรงกันข้าม ให้เราหมุนโรเตอร์ด้วยแรงของบุคคลที่สามในทิศทางของสนามแม่เหล็กส่วนกลับ แรงบิดส่วนเกิน (ผลลัพธ์) จะปรากฏขึ้น เร่งความเร็วของโรเตอร์ให้ใกล้เคียงกับความเร็วแบบซิงโครนัส ในกรณีนี้ สลิปของมอเตอร์สัมพันธ์กับสนามแม่เหล็กแบบลูกสูบ
![]()
มอเตอร์สลิปสัมพันธ์กับสนามแม่เหล็กหมุนย้อนกลับ
เมื่อพิจารณาถึงลักษณะผลลัพธ์ เราสามารถสรุปได้ดังต่อไปนี้
บทสรุป 1. มอเตอร์เฟสเดียวไม่มี แรงบิดเริ่มต้น. มันจะหมุนไปในทิศทางที่หมุนด้วยแรงภายนอก
สรุป 2เนื่องจากการเบรกของสนามหมุนย้อนกลับ ประสิทธิภาพของมอเตอร์แบบเฟสเดียวจึงแย่กว่ามอเตอร์แบบสามเฟส
เพื่อสร้างช่วงเวลาเริ่มต้น มอเตอร์เฟสเดียวจัดหาด้วยขดลวดเริ่มต้น, การเคลื่อนย้ายเชิงพื้นที่สัมพันธ์กับแกนหลัก การทำงานที่คดเคี้ยว 90 องศา ขดลวดเริ่มต้นเชื่อมต่อกับเครือข่ายผ่านองค์ประกอบการเปลี่ยนเฟส: ตัวเก็บประจุหรือความต้านทานแบบแอคทีฟ
รูปที่ 16.11 แสดงวงจรสวิตชิ่งขดลวดมอเตอร์ โดยที่ P คือขดลวดทำงาน P คือขดลวดสตาร์ท เลือกความจุขององค์ประกอบการเปลี่ยนเฟส C เพื่อให้กระแสในการทำงานและขดลวดเริ่มต้นแตกต่างกันในเฟส 90 ° มอเตอร์แบบอะซิงโครนัสสามเฟสสามารถใช้งานได้ตั้งแต่ เครือข่ายเฟสเดียวหากคุณเชื่อมต่อขดลวดตามแผนภาพต่อไปนี้ (รูปที่ 16.12)
ในแผนภาพที่แสดงในรูปที่ 16.12 และขดลวดสเตเตอร์เชื่อมต่อด้วยดาวและในแผนภาพในรูปที่ 16.12, b - สามเหลี่ยม ค่าความจุ C ~ 60 uF ต่อกำลังไฟ 1 กิโลวัตต์
ข้าว. 16.11. แบบแผนของการเปิดขดลวดของมอเตอร์แบบเฟสเดียว
ข้าว. 16.12. แบบแผนสำหรับการเปิดขดลวดของมอเตอร์สามเฟสสำหรับหนึ่งเฟส: a - ตัวเลือกแรก; b - ตัวเลือกที่สอง