อาจไม่มีกลไกหรือเครื่องจักรร้ายแรงเพียงเครื่องเดียวที่จะไม่ใช้มอเตอร์ไฟฟ้า ในรถด้วย เครื่องซักผ้า,เครื่องจักรกลการเกษตรและขนาดเล็ก เครื่องใช้ในครัวเรือน- ใช้ได้ทุกที่ เครื่องยนต์ไฟฟ้า. มอเตอร์ไฟฟ้าแบบอะซิงโครนัสที่ใช้กันอย่างแพร่หลายมากที่สุดและเราจะพูดถึงวันนี้
มอเตอร์ซิงโครนัสและอะซิงโครนัสในวิศวกรรมเครื่องกลและในชีวิตประจำวัน
เนื่องจากความเรียบง่ายและความประหยัด มอเตอร์ไฟฟ้าแบบอะซิงโครนัสจึงมีประโยชน์ไม่เพียงแต่ในด้านวิศวกรรมเครื่องกลและในชีวิตประจำวันเท่านั้น แต่เราจะพิจารณาเฉพาะมอเตอร์ดังกล่าวที่พบได้บ่อยที่สุด สาเหตุของความนิยมของมอเตอร์เหนี่ยวนำ กระแสสลับกลายเป็นความพร้อมใช้งาน ความสามารถในการเชื่อมต่อกับเต้ารับใดๆ โดยไม่ต้องมีวงจรเรียงกระแสและอุปกรณ์ที่เข้าชุดกัน รวมถึงความสะดวกในการบำรุงรักษาและการซ่อมแซมในกรณีนี้
มอเตอร์ไฟฟ้าแบบอะซิงโครนัสมีสองประเภท - ด้วย โรเตอร์กรงกระรอกและด้วยเฟสโรเตอร์ แต่ก่อนอื่น คุณควรเข้าใจการออกแบบและเรียนรู้หลักการทำงานของมอเตอร์แบบอะซิงโครนัสกับโรเตอร์กรงกระรอก หลังจากนั้นเหตุผลของความนิยมจะชัดเจนขึ้น แม้ว่ามอเตอร์แบบอะซิงโครนัสจะได้รับการพัฒนาเมื่อปลายศตวรรษที่ 19 แต่การออกแบบยังไม่ได้รับการเปลี่ยนแปลงพิเศษใดๆ
ประโยชน์ของมอเตอร์ไฟฟ้ากระแสสลับ
คุณสมบัติหลักของคุณลักษณะของเครื่องยนต์นี้และการแสดงออกที่มีค่าที่สุดคือความจริงที่ว่าภาระของเครื่องยนต์ไม่ได้ขึ้นอยู่กับความเร็วของเพลา สนามแม่เหล็กและแรงเคลื่อนไฟฟ้าได้รับการศึกษามาเป็นเวลากว่าสองร้อยปีแล้ว และมอเตอร์แบบอะซิงโครนัสของเราได้กลายเป็นเครื่องยืนยันที่ดีที่สุดในเรื่องนี้ ซึ่งถือเป็นหนึ่งในสิ่งที่ดีที่สุด วิธีที่มีประสิทธิภาพการเปลี่ยนแปลงพลังงาน
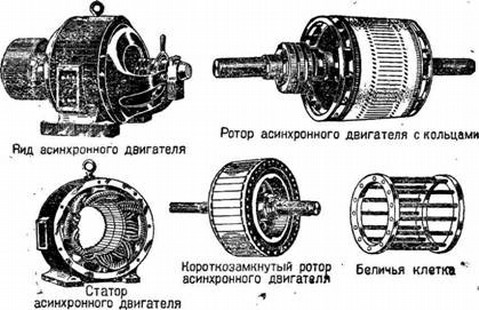
หลักการทำงานของมอเตอร์นี้ขึ้นอยู่กับปฏิสัมพันธ์ของการเคลื่อนไหว สนามแม่เหล็กและองค์ประกอบที่เป็นสื่อกระแสไฟฟ้าอยู่ภายในสนามนี้ เครื่องยนต์ดังที่ทราบกันดีในโรงเรียนประกอบด้วยสองหน่วยพื้นฐาน - โรเตอร์และสเตเตอร์ สเตเตอร์สร้างสนามแม่เหล็กหมุน โครงสร้างสเตเตอร์เป็นแกนโลหะ ขดลวดทองแดงที่มีฉนวนเทอร์โมแล็คเกอร์พันอยู่รอบๆ
ภายในสเตเตอร์ ภายในสนามแม่เหล็ก พวกเขาวางโรเตอร์ ซึ่งเป็นเพลาที่มีแกนและขดลวด รูปด้านล่างแสดงไดอะแกรมของอุปกรณ์ของมอเตอร์แบบอะซิงโครนัส
ตามแผนภาพ เป็นที่ชัดเจนว่าสเตเตอร์ประกอบด้วยเพลตแบบเรียงซ้อนและขดลวดหลายอันที่พันบนแกนแผ่น ขดลวดเหล่านี้สามารถเชื่อมต่อได้หลายวิธีขึ้นอยู่กับประเภทของแรงดันไฟฟ้า ขดลวดแต่ละอันจะเลื่อนสัมพันธ์กัน 120 องศา และโรเตอร์ของเครื่องยนต์ดังกล่าวสามารถเป็นพื้นฐานได้สองประเภท
โรเตอร์แบบเฟสไม่ได้มีความแตกต่างกันโดยพื้นฐานแล้วในการไขลานจากสเตเตอร์ นี่คือขดลวดสามเฟสซึ่งปลายเชื่อมต่อตามรูปแบบ "ดาว" ปลายขดลวดอิสระเชื่อมต่อกับวงแหวนเก็บกระแส วงแหวนสัมผัสกับตัวนำผ่านแปรง ดังนั้นจึงสามารถติดตั้งตัวต้านทานจำกัดเพิ่มเติมในวงจรเชื่อมต่อได้

ตัวต้านทานเป็นอุปกรณ์ ซอฟต์สตาร์ททำหน้าที่ทำให้สามารถลดค่าของกระแสเริ่มต้นซึ่งสามารถเข้าถึงค่าที่ค่อนข้างใหญ่ได้
โรเตอร์กรงกระรอกและคุณสมบัติของมัน
โรเตอร์กรงกระรอกเป็นแกนตั้งประเภทที่ทำจากเหล็กแผ่นพิเศษ แกนกลางมีช่องที่ไม่แยกขดลวดออกจากกัน แต่ในทางกลับกัน - เต็มไปด้วยโลหะเบาที่หลอมละลายต่ำและก่อตัวเป็นแท่งที่ยึดที่ปลายของวงแหวน
โลหะที่ใช้ทำแท่งเหล่านี้และช่องว่างระหว่างแกนจะถูกเทขึ้นอยู่กับคุณสมบัติที่ต้องการของเครื่องยนต์และอาจเป็นทองแดงหรืออลูมิเนียมก็ได้
สนามแม่เหล็กทำงานอย่างไร
เครื่องยนต์ขับเคลื่อนตามกระบวนการรับ งานเครื่องกลอันเป็นผลมาจากการกระทำบนตัวนำของสนามแม่เหล็กที่กำลังเคลื่อนที่ แรงดันไฟฟ้าถูกนำไปใช้กับขดลวดสเตเตอร์และแต่ละเฟสจะสร้างฟลักซ์แม่เหล็กของตัวเอง ความถี่ของฟลักซ์แม่เหล็กโดยตรงขึ้นอยู่กับความถี่ของกระแสที่จ่ายไปยังปลายขดลวด

มอเตอร์ไฟฟ้าได้รับการออกแบบให้แปลงพลังงานไฟฟ้าเป็นพลังงานกลโดยมีการสูญเสียต่ำ
เราเสนอให้พิจารณาหลักการกระทำ มอเตอร์แบบอะซิงโครนัสด้วยโรเตอร์กรงกระรอก แบบสามเฟสและเฟสเดียว ตลอดจนการออกแบบและไดอะแกรมการเชื่อมต่อ
องค์ประกอบหลักของมอเตอร์ไฟฟ้า ได้แก่ สเตเตอร์ โรเตอร์ ขดลวด และวงจรแม่เหล็ก
การเปลี่ยนแปลง พลังงานไฟฟ้าเป็นกลไกที่เกิดขึ้นในส่วนของการหมุนของมอเตอร์ - โรเตอร์
ในมอเตอร์ไฟฟ้ากระแสสลับ โรเตอร์ได้รับพลังงานไม่เพียงเนื่องจากสนามแม่เหล็กเท่านั้น แต่ยังผ่านการเหนี่ยวนำด้วย ดังนั้นจึงเรียกว่ามอเตอร์เหนี่ยวนำ เทียบได้กับ ขดลวดทุติยภูมิหม้อแปลงไฟฟ้า มอเตอร์เหนี่ยวนำเหล่านี้เรียกอีกอย่างว่าหม้อแปลงหมุน รุ่นที่ใช้บ่อยที่สุดได้รับการออกแบบสำหรับการสลับสามเฟส
การก่อสร้างมอเตอร์เหนี่ยวนำ
ทิศทางการหมุนของมอเตอร์ไฟฟ้าถูกกำหนดโดยกฎของมือซ้ายของวงแหวน: มันแสดงให้เห็นความสัมพันธ์ระหว่างสนามแม่เหล็กและตัวนำ
กฎข้อที่สองที่สำคัญมากของฟาราเดย์:
- EMF ถูกเหนี่ยวนำในขดลวด แต่ฟลักซ์แม่เหล็กไฟฟ้าจะเปลี่ยนไปตามกาลเวลา
- ขนาดของ EMF ที่เหนี่ยวนำจะเป็นสัดส่วนโดยตรงกับอัตราการเปลี่ยนแปลงของฟลักซ์ไฟฟ้า
- ทิศทางของ EMF ตรงกันข้ามกับกระแส
หลักการทำงาน
เมื่อแรงดันไฟฟ้าถูกนำไปใช้กับขดลวดสเตเตอร์แบบตายตัว มันจะสร้างสนามแม่เหล็กในสเตเตอร์ หากใช้แรงดันไฟฟ้ากระแสสลับ ฟลักซ์แม่เหล็กที่สร้างขึ้นจะเปลี่ยนไป ดังนั้นสเตเตอร์จึงทำให้เกิดการเปลี่ยนแปลงในสนามแม่เหล็ก และโรเตอร์ก็รับฟลักซ์แม่เหล็ก
ดังนั้นโรเตอร์ของมอเตอร์ไฟฟ้าจึงได้รับฟลักซ์สเตเตอร์นี้จึงหมุนได้ นี่คือหลักการพื้นฐานของการทำงานและการเลื่อนในเครื่องอะซิงโครนัส จากด้านบนควรสังเกตว่าฟลักซ์แม่เหล็กของสเตเตอร์ (และแรงดันของมัน) จะต้องเท่ากับกระแสสลับเพื่อที่จะหมุนโรเตอร์เพื่อให้เครื่องเหนี่ยวนำสามารถทำงานได้จากเครือข่ายกระแสสลับเท่านั้น

เมื่อมอเตอร์ดังกล่าวทำหน้าที่เป็นเครื่องกำเนิดไฟฟ้า มันจะสร้างกระแสสลับโดยตรง ในกรณีของงานดังกล่าว โรเตอร์จะถูกหมุนด้วยวิธีการภายนอก เช่น กังหัน หากโรเตอร์มีสนามแม่เหล็กตกค้างอยู่บ้าง นั่นคือ สมบัติทางแม่เหล็กบางอย่างที่คงไว้เหมือนแม่เหล็กภายในวัสดุ โรเตอร์จะสร้างฟลักซ์แปรผันในขดลวดสเตเตอร์ที่อยู่กับที่ ดังนั้นจึงเป็นขดลวดสเตเตอร์ที่จะได้รับแรงดันไฟฟ้าเหนี่ยวนำโดยหลักการเหนี่ยวนำ
เครื่องกำเนิดไฟฟ้าเหนี่ยวนำใช้ในร้านค้าขนาดเล็กและครัวเรือนเพื่อให้ การสนับสนุนเพิ่มเติมแหล่งจ่ายไฟและราคาถูกที่สุดเนื่องจากติดตั้งง่าย เมื่อเร็ว ๆ นี้มีการใช้กันอย่างแพร่หลายโดยผู้คนในประเทศเหล่านั้นที่เครื่องจักรไฟฟ้าสูญเสียพลังงานเนื่องจากแรงดันไฟฟ้าตกอย่างต่อเนื่องในแหล่งจ่ายไฟหลัก ที่สุดเวลาโรเตอร์หมุนด้วยขนาดเล็ก เครื่องยนต์ดีเซลเชื่อมต่อกับ เครื่องกำเนิดไฟฟ้าแบบอะซิงโครนัสแรงดันไฟฟ้ากระแสสลับ
โรเตอร์หมุนอย่างไร
ฟลักซ์แม่เหล็กหมุนผ่านช่องว่างอากาศระหว่างสเตเตอร์ โรเตอร์ และขดลวดของตัวนำคงที่ในโรเตอร์ กระแสหมุนนี้สร้างแรงดันไฟฟ้าในตัวนำของโรเตอร์ ดังนั้นจึงทำให้เกิด EMF ในตัวพวกมัน ตามกฎการเหนี่ยวนำแม่เหล็กไฟฟ้าของฟาราเดย์ การเคลื่อนที่สัมพัทธ์ระหว่างฟลักซ์แม่เหล็กที่หมุนอยู่และขดลวดโรเตอร์แบบตายตัวที่กระตุ้น EMF ซึ่งเป็นพื้นฐานของการหมุน
มอเตอร์ที่มีโรเตอร์กรงกระรอก ซึ่งตัวนำของโรเตอร์ก่อตัวเป็นวงจรปิด อันเป็นผลมาจากการที่ EMF เกิดขึ้นเหนี่ยวนำกระแสในนั้น ทิศทางถูกกำหนดโดยกฎของเลนส์ และเช่นเพื่อต่อต้าน สาเหตุของการเกิดขึ้น การเคลื่อนที่สัมพัทธ์ของโรเตอร์ระหว่างฟลักซ์แม่เหล็กที่หมุนอยู่และตัวนำคงที่คือการกระทำของการหมุน ดังนั้นเพื่อลดความเร็วสัมพัทธ์ โรเตอร์จะเริ่มหมุนไปในทิศทางเดียวกับฟลักซ์การปั่นบนขดลวดสเตเตอร์ พยายามจับมัน ความถี่ของ EMF ที่เหนี่ยวนำให้มีค่าเท่ากับความถี่กำลัง
มอเตอร์เหนี่ยวนำหวี
เมื่อแรงดันไฟฟ้าต่ำ ขดลวดโรเตอร์กรงกระรอกจะไม่ตื่นเต้น เนื่องจากเมื่อจำนวนฟันของสเตเตอร์และจำนวนฟันของโรเตอร์เท่ากัน จึงทำให้เกิดการตรึงแม่เหล็กระหว่างสเตเตอร์กับโรเตอร์ การสัมผัสทางกายภาพนี้เรียกอีกอย่างว่าการล็อคฟันหรือการล็อคด้วยแม่เหล็ก ปัญหานี้สามารถแก้ไขได้โดยการเพิ่มจำนวนช่องโรเตอร์หรือสเตเตอร์
การเชื่อมต่อ
มอเตอร์เหนี่ยวนำสามารถหยุดได้โดยเพียงแค่สลับสายนำสเตเตอร์สองอัน ใช้ในกรณีฉุกเฉิน จากนั้นจะย้อนกลับทิศทางของการไหลของการหมุนซึ่งทำให้เกิดแรงบิด ซึ่งจะทำให้ไฟฟ้าขัดข้องบนโรเตอร์ สิ่งนี้เรียกว่าการเบรกแบบป้องกันเฟส
วิดีโอ: มอเตอร์เหนี่ยวนำทำงานอย่างไร
เพื่อป้องกันไม่ให้สิ่งนี้เกิดขึ้นในมอเตอร์แบบอะซิงโครนัสแบบเฟสเดียว จำเป็นต้องใช้อุปกรณ์ตัวเก็บประจุ
ต้องเชื่อมต่อกับ เริ่มคดเคี้ยวแต่ต้องคำนวณก่อน สูตร
QC \u003d คุณกับฉัน 2 \u003d U 2 ฉัน 2 / บาป 2
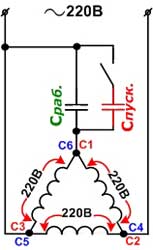
แผนภาพ: การเชื่อมต่อมอเตอร์แบบอะซิงโครนัส
ซึ่งตามมาด้วยว่าเครื่องจักรไฟฟ้ากระแสสลับประเภทสองเฟสหรือเฟสเดียวจะต้องจัดหาตัวเก็บประจุที่มีกำลังไฟฟ้าเท่ากับกำลังของมอเตอร์เอง
การเปรียบเทียบคลัตช์
เมื่อพิจารณาถึงหลักการทำงานของมอเตอร์ไฟฟ้าแบบอะซิงโครนัสที่ใช้ในเครื่องจักรอุตสาหกรรมและลักษณะทางเทคนิคแล้ว จะต้องพูดถึงคลัตช์เชิงกลแบบหมุน แรงบิดบนเพลาขับต้องเท่ากับแรงบิดบนเพลาขับ นอกจากนี้ ควรเน้นว่าแรงบิดทั้งสองนี้เหมือนกัน เนื่องจากแรงบิดของลิเนียร์คอนเวอร์เตอร์เกิดจากการเสียดสีระหว่างดิสก์ภายในคลัตช์

หลักการทำงานที่คล้ายกันและ มอเตอร์ฉุดด้วยเฟสโรเตอร์ ระบบของมอเตอร์ดังกล่าวประกอบด้วยแปดเสา (ซึ่ง 4 อันเป็นหลักและ 4 อันเพิ่มเติม) และโครงกระดูก ขดลวดทองแดงตั้งอยู่บนเสาหลัก การหมุนของกลไกดังกล่าวเกิดจากชุดเกียร์ซึ่งรับแรงบิดจากเพลากระดองหรือที่เรียกว่าแกนกลาง รวมอยู่ในเครือข่าย ทำด้วยสายเคเบิลแบบยืดหยุ่นสี่เส้น วัตถุประสงค์หลักของมอเตอร์ไฟฟ้าแบบหลายขั้วคือการขับเคลื่อนเครื่องจักรกลหนัก ได้แก่ หัวรถจักรดีเซล รถแทรกเตอร์ รถรวม และในบางกรณีก็ใช้เครื่องมือกล
ข้อดีข้อเสีย
อุปกรณ์ของมอเตอร์แบบอะซิงโครนัสเกือบจะเป็นสากล แต่กลไกนี้มีข้อดีและข้อเสีย
ข้อดีของมอเตอร์เหนี่ยวนำกระแสสลับ:
- การออกแบบรูปทรงที่เรียบง่าย
- ต้นทุนการผลิตต่ำ
- การออกแบบที่เชื่อถือได้และใช้งานได้จริง
- ไม่แปลกในการดำเนินงาน
- รูปแบบการควบคุมที่เรียบง่าย
ประสิทธิภาพของมอเตอร์เหล่านี้สูงมาก เนื่องจากไม่มีการสูญเสียแรงเสียดทานและปัจจัยด้านกำลังที่ค่อนข้างสูง
ข้อเสียของมอเตอร์เหนี่ยวนำกระแสสลับ:
- ไม่สามารถควบคุมความเร็วได้โดยไม่สูญเสียกำลัง
- แรงบิดเริ่มต้นที่ค่อนข้างเล็ก
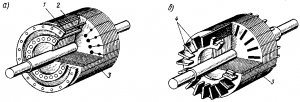
(รูปที่ 249 และ 250) ประกอบด้วยส่วนหลักดังต่อไปนี้: สเตเตอร์ที่มีขดลวดสามเฟส โรเตอร์กรงกระรอกและโครงกระดูก โรเตอร์ที่คดเคี้ยวทำให้ไม่ต้องสัมผัส (ไม่ได้เชื่อมต่อกับวงจรภายนอกใด ๆ ) ซึ่งกำหนดความน่าเชื่อถือสูงของเครื่องยนต์ดังกล่าว
ระบบแม่เหล็ก.เครื่องอะซิงโครนัสไม่เหมือนรถ กระแสตรงไม่มีขั้วเด่นชัด ระบบแม่เหล็กดังกล่าวเรียกว่า เสาโดยนัยจำนวนเสาในเครื่องถูกกำหนดโดยจำนวนขดลวดในขดลวดสเตเตอร์และรูปแบบการเชื่อมต่อ ในเครื่องสี่ขั้ว (รูปที่ 251) ระบบแม่เหล็กประกอบด้วยสี่กิ่งที่เหมือนกันซึ่งแต่ละอันผ่านฟลักซ์แม่เหล็กครึ่งหนึ่ง F p ของหนึ่งขั้วในเครื่องสองขั้วมีสองกิ่งดังกล่าวใน เครื่องหกขั้ว - หก ฯลฯ เนื่องจากระบบแม่เหล็กผ่านฟลักซ์แม่เหล็กแบบแปรผันผ่านองค์ประกอบทั้งหมดจึงไม่เพียง แต่โรเตอร์ 1 เท่านั้น แต่




และสเตเตอร์ 2 ทำจากแผ่นเหล็กไฟฟ้า (รูปที่ 252) แยกออกจากกันด้วยฟิล์มเคลือบเงา สเกล ฯลฯ ส่งผลให้กระแสลมหมุนวนเกิดอันตรายในสเตเตอร์และเหล็กโรเตอร์ระหว่างการหมุน ของสนามแม่เหล็กจะลดลง แผ่นสเตเตอร์และโรเตอร์มีร่องเปิด กึ่งปิด หรือปิด ซึ่งมีตัวนำของขดลวดตามลำดับ ในสเตเตอร์มักใช้ช่องกึ่งปิดที่มีรูปร่างเป็นสี่เหลี่ยมหรือวงรีในเครื่องจักรกำลังสูง - ช่องเปิดที่มีรูปร่างเป็นรูปสี่เหลี่ยมผืนผ้า
แกนสเตเตอร์ 1 (รูปที่ 253, a) ถูกกดลงในโครงหล่อ 3 และเสริมด้วยสกรูล็อค แกนโรเตอร์ถูกกดลงบนเพลาของโรเตอร์ ซึ่งหมุนในตลับลูกปืนที่ติดตั้งในเกราะป้องกันปลายทั้งสองข้าง ช่องว่างอากาศระหว่างสเตเตอร์และโรเตอร์คือ ขนาดขั้นต่ำอนุญาตในแง่ของความแม่นยำในการประกอบและความแข็งแกร่งทางกลของโครงสร้าง ในเครื่องยนต์ขนาดเล็กและ พลังปานกลางช่องว่างอากาศมักจะเป็นสองสามในสิบของมิลลิเมตร ช่องว่างดังกล่าวช่วยลดความต้านทานแม่เหล็กของวงจรแม่เหล็กของเครื่อง และทำให้กระแสแม่เหล็กที่จำเป็นในการสร้างฟลักซ์แม่เหล็กในมอเตอร์ลดลง การลดกระแสแม่เหล็กช่วยเพิ่มปัจจัยด้านกำลังของมอเตอร์
ขดลวดสเตเตอร์. มันทำในรูปแบบของขดลวดที่มีหน้าตัดกลมหรือสี่เหลี่ยม ตัวนำในร่องเชื่อมต่อกันเป็นชุดของขดลวด 2 (รูปที่ 253, b) ขดลวดถูกแบ่งออกเป็นกลุ่มที่เหมือนกันตามจำนวนเฟส ซึ่งจัดเรียงอย่างสมมาตรตามเส้นรอบวงของสเตเตอร์ (รูปที่ 254, a) หรือโรเตอร์ ในแต่ละกลุ่มดังกล่าว ขดลวดทั้งหมดเชื่อมต่อกันด้วยไฟฟ้า ก่อตัวเป็นหนึ่งเฟสของขดลวด นั่นคือ แยกจากกัน วงจรไฟฟ้า. ที่ค่ากระแสเฟสสูงหรือหากจำเป็นต้องเปลี่ยนคอยล์แต่ละตัว เฟสสามารถมีกิ่งขนานได้หลายกิ่ง องค์ประกอบที่ง่ายที่สุดของขดลวดคือขดลวด (รูปที่ 254, b) ประกอบด้วยตัวนำสองตัวที่ 1 และ 2 ซึ่งวางอยู่ในร่องที่อยู่ติดกันที่บางส่วน

tori ระยะทาง y. ระยะทางนี้ประมาณเท่ากับหนึ่งขั้วหาร m ซึ่งเข้าใจว่าเป็นความยาวของส่วนโค้งที่สอดคล้องกับหนึ่งขั้ว
โดยปกติ ผลัดที่เกิดขึ้นโดยตัวนำที่วางอยู่ในร่องเดียวกันจะรวมกันเป็นหนึ่งหรือสองขดลวด บางครั้งเรียกว่าส่วนต่างๆ พวกมันถูกวางในลักษณะที่ด้านหนึ่งของขดลวดแต่ละด้านหรือสองด้านวางไว้ในแต่ละร่อง - ด้านหนึ่งอยู่เหนืออีกด้านหนึ่ง ตามนี้ขดลวดหนึ่งและสองชั้นมีความโดดเด่น พารามิเตอร์หลักที่กำหนดการกระจายของขดลวดเหนือช่องคือจำนวนช่อง q ต่อขั้วและเฟส
ในขดลวดสเตเตอร์ของมอเตอร์สองขั้ว (ดูรูปที่ 254, a) แต่ละเฟส (A-X; B-Y; C-Z) ประกอบด้วยสามขดลวดซึ่งด้านข้างอยู่ในร่องที่อยู่ติดกันสามร่องเช่น q \u003d 3 โดยปกติ q \u003e 1 , คดเคี้ยวเช่นนี้เรียกว่า แจกจ่าย.
ที่แพร่หลายที่สุดคือขดลวดกระจายสองชั้น ส่วนของพวกเขา 1 (รูปที่ 255, a) ถูกวางไว้ในร่อง 2 ของสเตเตอร์ในสองชั้น ตัวนำของขดลวดสเตเตอร์มีความแข็งแรงในร่องด้วยเวดจ์ textolite 5 (รูปที่ 255, b) ซึ่งวางอยู่ที่หัวฟัน
ผนังของร่องปูด้วยวัสดุฉนวนแผ่น 4 (แผ่นอิเล็กโทรคาร์ด ผ้าเคลือบเงา ฯลฯ) ตัวนำที่อยู่ในร่องเชื่อมต่อกันด้วยวิธีที่เหมาะสมจากด้านท้ายของเครื่อง สายที่ต่อกันเรียกว่า ส่วนหน้าผากเนื่องจากส่วนหน้าไม่ได้มีส่วนร่วมในการเหนี่ยวนำของอี ฯลฯ จะดำเนินการให้สั้นที่สุด
ขดลวดสเตเตอร์แต่ละตัวสามารถเชื่อมต่อแบบสตาร์หรือเดลต้าได้ จุดเริ่มต้นและจุดสิ้นสุดของขดลวดของแต่ละเฟสจะนำไปสู่ขั้วมอเตอร์หกขั้ว
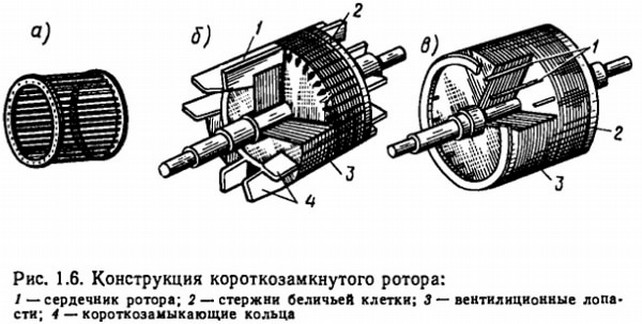
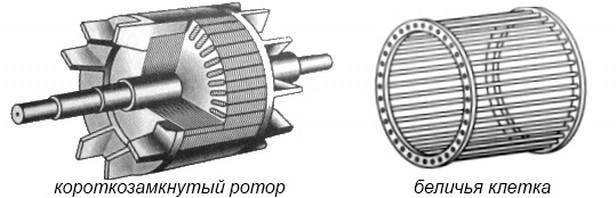
โรเตอร์ที่คดเคี้ยวขดลวดโรเตอร์ทำในรูปแบบของกรงกระรอก (รูปที่ 256, a) มันทำจากแท่งทองแดงหรืออลูมิเนียมลัดวงจรที่ปลายด้วยวงแหวนสองวง (รูปที่ 256, b) แท่งของขดลวดนี้ถูกสอดเข้าไปในร่องของโรเตอร์โดยไม่มีฉนวนใด ๆ เนื่องจากแรงดันไฟฟ้าในไฟฟ้าลัดวงจร
การหมุนของโรเตอร์นั้นเป็นศูนย์ ร่องของโรเตอร์กรงกระรอกมักจะเป็นแบบกึ่งปิด และในเครื่องจักรที่ใช้พลังงานต่ำจะปิด (ร่องมีขอบเหล็กแยกจากช่องว่างอากาศ) ร่องรูปทรงนี้ช่วยให้คุณเสริมความแข็งแรงของตัวนำของขดลวดโรเตอร์ได้ดี แม้ว่าจะเพิ่มความต้านทานอุปนัยบ้างก็ตาม
ในเครื่องยนต์ที่มีกำลังสูงถึง 100 kW มักจะได้แท่งกรงกระรอกโดยการเทอลูมิเนียมหลอมลงในร่องของแกนโรเตอร์ (รูปที่ 256, c) เมื่อรวมกับแท่งของกรงกระรอกแล้วแหวนปลายลัดวงจรที่เชื่อมต่อก็ถูกหล่อด้วย
อะลูมิเนียมเหมาะสำหรับจุดประสงค์นี้ เนื่องจากมีความหนาแน่นต่ำ มีค่าการนำไฟฟ้าสูงเพียงพอ และละลายได้ง่าย
โดยทั่วไปแล้ว มอเตอร์จะมีพัดลมติดตั้งอยู่ที่แกนโรเตอร์ พวกเขาทำการระบายอากาศแบบบังคับของชิ้นส่วนที่ให้ความร้อนของเครื่อง (ขดลวดและเหล็กของสเตเตอร์และโรเตอร์) ช่วยให้คุณได้รับจากเครื่องยนต์ พลังงานมากขึ้น. ในเครื่องยนต์ที่มีโรเตอร์แบบกรงกระรอก ใบพัดของพัดลมมักจะถูกประกอบเข้ากับวงแหวนด้านข้างของกรงกระรอก (ดูรูปที่ 256, c)
มอเตอร์แบบอะซิงโครนัสที่มีโรเตอร์แบบกรงกระรอกมีการออกแบบที่เรียบง่ายและใช้งานได้อย่างน่าเชื่อถือ มีการใช้กันอย่างแพร่หลายในการขับเคลื่อนเครื่องจักรงานโลหะและอุปกรณ์อื่นๆ ที่เริ่มทำงานโดยไม่มีโหลด อย่างไรก็ตาม แรงบิดเริ่มต้นที่ค่อนข้างต่ำของเครื่องยนต์เหล่านี้และขนาดใหญ่ เริ่มต้นปัจจุบันไม่อนุญาตให้ใช้เพื่อขับเคลื่อนเครื่องจักรและกลไกดังกล่าวที่ต้องเปิดตัวทันทีภายใต้ภาระหนัก (ด้วยแรงบิดเริ่มต้นขนาดใหญ่) เครื่องจักรเหล่านี้รวมถึงอุปกรณ์ยก คอมเพรสเซอร์ ฯลฯ
สามารถเพิ่มแรงบิดเริ่มต้นและลดกระแสเริ่มต้นเมื่อทำกรงกระรอกที่มีความต้านทานแบบแอคทีฟเพิ่มขึ้น ในกรณีนี้ มอเตอร์จะมีสลิปเพิ่มขึ้นและสูญเสียพลังงานมากในขดลวดของโรเตอร์ เครื่องยนต์ดังกล่าวเรียกว่าเครื่องยนต์สลิปสูง (แสดงเป็น AC) สามารถใช้ขับเครื่องจักรที่ทำงานในระยะเวลาอันสั้นได้ หนึ่ง. ป.ล. ใช้มอเตอร์ไฟฟ้ากระแสสลับเหล่านี้ (โดยมีค่าสลิปสูงถึง 10%) เพื่อขับเคลื่อนคอมเพรสเซอร์ที่ทำงานเป็นช่วงๆ ในช่วงเวลาสั้นๆ เมื่อแรงดันในถังลมลดลงต่ำกว่าขีดจำกัดที่กำหนด
มอเตอร์ที่มีแรงบิดเริ่มต้นเพิ่มขึ้นมอเตอร์แบบอะซิงโครนัสแบบกรงกระรอกพร้อมแรงบิดเริ่มต้นที่เพิ่มขึ้นมีการออกแบบโรเตอร์พิเศษ (AP ที่กำหนด) ซึ่งรวมถึงมอเตอร์กรงกระรอกคู่และมอเตอร์สล็อตลึก
โรเตอร์ 3 (รูปที่ 257, a) ของมอเตอร์กรงกระรอกคู่มีขดลวดลัดวงจรสองเส้น กรงด้านนอก 1 เป็นตัวเริ่มต้น มีแอคทีฟขนาดใหญ่และขนาดเล็ก ปฏิกิริยา. กรงชั้นใน 2 เป็นขดลวดหลักของโรเตอร์ ในทางตรงกันข้ามมีความต้านทานเชิงแอคทีฟและปฏิกิริยาขนาดใหญ่ที่ไม่มีนัยสำคัญ ในช่วงเริ่มต้นของการเริ่มต้น กระแสส่วนใหญ่ไหลผ่านกรงด้านนอก ซึ่งสร้างแรงบิดอย่างมาก เมื่อความเร็วเพิ่มขึ้น กระแสจะไหลเข้าสู่กรงด้านใน และเมื่อสิ้นสุดกระบวนการสตาร์ท เครื่องจะทำงานตามปกติ มอเตอร์กรงกระรอกด้วยหนึ่งเซลล์ (ภายใน) การกระจัดของกระแสเข้าสู่กรงด้านนอกในช่วงเวลาเริ่มต้นของการเริ่มต้นนั้นอธิบายโดยการกระทำ e. ดีเอส การเหนี่ยวนำตนเองที่เกิดขึ้นในตัวนำของโรเตอร์ ยิ่งตัวนำที่ต่ำกว่าอยู่ในร่องยิ่งมีฟลักซ์การรั่วของแม่เหล็กมากขึ้น 6 ที่หุ้มอยู่และยิ่งมีค่า e มากขึ้น ดีเอส มีการเหนี่ยวนำให้เกิดการเหนี่ยวนำตนเอง (รูปที่ 257, c) ดังนั้นยิ่งมีความต้านทานอุปนัยมากขึ้น
การกระจัดของกระแสเข้าสู่ตัวนำด้านบนของโรเตอร์มีผลอย่างมากเมื่อโรเตอร์อยู่กับที่ เมื่อความถี่ของกระแสเหนี่ยวนำในเซลล์ทั้งสองของโรเตอร์สูง ในขณะเดียวกันอุปนัย
![]()
ความต้านทานของทั้งสองเซลล์มีค่ามากกว่าเซลล์ที่ใช้งานอยู่ และกระแสจะกระจายระหว่างเซลล์ทั้งสองตามสัดส่วนผกผันกับความต้านทานแบบอุปนัย กล่าวคือ ส่วนใหญ่จะผ่านเซลล์ชั้นนอกที่มีความต้านทานเชิงรุกมาก เมื่อความเร็วของโรเตอร์เพิ่มขึ้น ความถี่ของกระแสในนั้นจะลดลง (สนามแม่เหล็กที่หมุนอยู่จะข้ามตัวนำของโรเตอร์ที่ความถี่ต่ำลง) และกระแสจะเริ่มไหลผ่านเซลล์ทั้งสองตามความต้านทานเชิงแอคทีฟ กล่าวคือ ส่วนใหญ่ผ่านเซลล์ชั้นใน
ดังนั้นกระบวนการสตาร์ทมอเตอร์ด้วยกรงกระรอกคู่จึงคล้ายกับกระบวนการสตาร์ทมอเตอร์แบบอะซิงโครนัสด้วยเฟสโรเตอร์เมื่อเริ่มต้นการต้านทานแบบแอคทีฟเพิ่มเติม (สตาร์ทรีโอสแตต) ถูกนำเข้าสู่วงจรโรเตอร์โรเตอร์ และในขณะที่มันเร่งตัวขึ้น ความต้านทานนี้จะออกมา ในทำนองเดียวกัน ในเครื่องยนต์ที่กำลังพิจารณา เมื่อเริ่มต้นสตาร์ท กระแสจะไหลผ่านกรงด้านนอกที่มีแรงต้านแบบแอคทีฟมาก จากนั้น ขณะเร่งความเร็ว มันก็จะค่อยๆ ผ่านเข้าไปในกรงด้านในด้วยขนาดเล็ก ความต้านทานที่ใช้งาน
เพื่อการเพิ่มขึ้น ความต้านทานที่ใช้งานกรงเริ่มต้น ก้านของมันทำจากทองเหลืองแมงกานีสหรือบรอนซ์ ก้านของกรงทำงานทำจากทองแดงซึ่งมีความต้านทานต่ำ และพื้นที่หน้าตัดของมันใหญ่กว่าของกรงเริ่มต้น เป็นผลให้ความต้านทานแบบแอคทีฟของกรงเริ่มต้นเพิ่มขึ้น 4-5 เท่าเมื่อเทียบกับที่ทำงาน ระหว่างแท่งของเซลล์ทั้งสองมีช่องว่างแคบ ๆ 5 ขนาดที่กำหนดความเหนี่ยวนำของเซลล์ทำงาน มอเตอร์แบบสองเซลล์มีราคาแพงกว่ามอเตอร์แบบกรงกระรอกทั่วไป 20-30% เพื่อลดความซับซ้อนของเทคโนโลยีการผลิตของโรเตอร์ เครื่องยนต์สองเซลล์ที่มีกำลังไฟฟ้าขนาดเล็กและขนาดกลางจึงถูกสร้างขึ้นด้วยโครงอะลูมิเนียมหล่อ
การกระทำของเครื่องยนต์ที่มีร่องลึก (รูปที่ 257, b) ก็ขึ้นอยู่กับการใช้ปรากฏการณ์การกระจัดในปัจจุบันด้วย ในเครื่องยนต์เหล่านี้ แท่ง 4 ของกรงกระรอกทำในรูปแบบของยางทองแดงแคบที่ฝังอยู่ในร่องลึกของโรเตอร์ 3 (ความสูงของร่องคือ 10-12 เท่าของความกว้าง) ชั้นล่างของแท่งที่อยู่ไกลจากพื้นผิวของโรเตอร์ถูกปกคลุมด้วยเส้นแม่เหล็กจำนวนมากของฟลักซ์การรั่วไหล 6 มากกว่าส่วนบน (รูปที่ 257, d) ดังนั้นจึงมีการเหนี่ยวนำมากขึ้นหลายเท่า . ในตอนต้นของการเริ่มต้นอันเป็นผลมาจากความต้านทานอุปนัยที่เพิ่มขึ้นของส่วนล่างของแท่ง กระแสส่วนใหญ่ไหลผ่านส่วนบนของพวกมัน ในกรณีนี้จะใช้เพียงส่วนเล็ก ๆ ของส่วนตัดขวางของแต่ละแกนซึ่งนำไปสู่การเพิ่มขึ้นของความต้านทานเชิงรุกและด้วยเหตุนี้การเพิ่มความต้านทานเชิงรุกของขดลวดโรเตอร์ทั้งหมด
ด้วยการเพิ่มความเร็วของโรเตอร์ การกระจัดของกระแสไปยังส่วนบนของแท่งจะลดลง (ด้วยเหตุผลเดียวกับในมอเตอร์ที่มีกรงกระรอกคู่) และหลังจากสิ้นสุดการสตาร์ท กระแสจะกระจายทั่วถึง พื้นที่หน้าตัดของพวกเขา
มอเตอร์อะซิงโครนัสเป็นอะซิงโครนัส เครื่องไฟฟ้ากระแสสลับในโหมดมอเตอร์ซึ่งความถี่ของการหมุนของสนามแม่เหล็กสเตเตอร์มากกว่าความถี่ของการหมุนของโรเตอร์
หลักการทำงานขึ้นอยู่กับการสร้างสนามแม่เหล็กหมุนของสเตเตอร์ ซึ่งคุณสามารถอ่านเพิ่มเติมได้จากลิงก์ที่ระบุ
มอเตอร์แบบอะซิงโครนัสเป็นหนึ่งในเครื่องจักรไฟฟ้าทั่วไป และมักจะเป็นหนึ่งในตัวแปลงหลักของพลังงานไฟฟ้าใน พลังงานกล. ข้อได้เปรียบที่ใหญ่ที่สุดคือการไม่มีการสัมผัสระหว่างชิ้นส่วนที่เคลื่อนที่และเคลื่อนที่ของโรเตอร์ ฉันหมายถึงการสัมผัสทางไฟฟ้า ตัวอย่างเช่น ในมอเตอร์กระแสตรงผ่านแปรงและตัวสะสม อย่างไรก็ตาม สิ่งนี้เป็นจริงสำหรับ IM ที่มีโรเตอร์กรงกระรอกเท่านั้น ในมอเตอร์แบบอะซิงโครนัสที่มีเฟสโรเตอร์ หน้าสัมผัสนี้จะเกิดขึ้น แต่จะเพิ่มเติมในภายหลัง
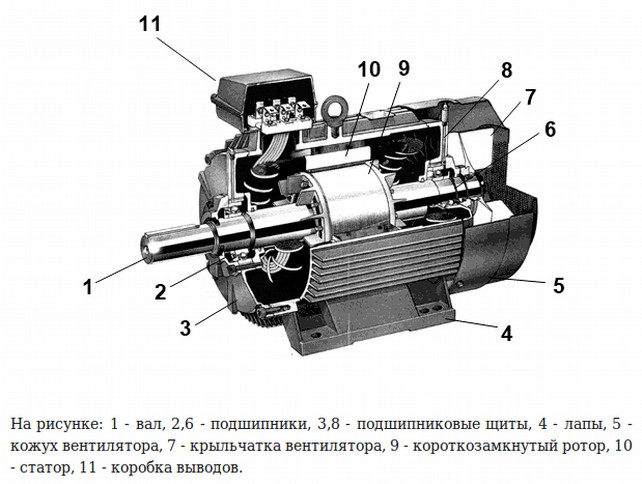
พิจารณาการออกแบบ ตัวอย่างคือมอเตอร์แบบอะซิงโครนัสที่มีโรเตอร์กรงกระรอก แต่มีโรเตอร์ประเภทเฟสด้วย มอเตอร์แบบอะซิงโครนัสประกอบด้วยสเตเตอร์และโรเตอร์ซึ่งมีช่องว่างอากาศ ในทางกลับกัน สเตเตอร์และโรเตอร์ยังคงมีส่วนที่เรียกว่าแอคทีฟ - ขดลวดกระตุ้น (แยกสเตเตอร์และโรเตอร์แยกต่างหาก) และวงจรแม่เหล็ก (แกนกลาง) ส่วนอื่นๆ ทั้งหมดของ IM เช่น เพลา ตลับลูกปืน พัดลม ตัวเรือน ฯลฯ - รายละเอียดโครงสร้างล้วนๆ ที่ให้การปกป้องจากสิ่งแวดล้อม ความแข็งแรง ความเย็น ความสามารถในการหมุน
รูปที่ 1 - การออกแบบมอเตอร์แบบอะซิงโครนัส
สเตเตอร์เป็นขดลวดสามเฟส (หรือหลายเฟส) ซึ่งตัวนำจะวางเรียงกันเป็นร่องทั่วเส้นรอบวง โดยมีระยะเชิงมุม 120 เอล องศา ปลายของขดลวดสเตเตอร์มักจะเชื่อมต่อตามรูปแบบ "ดาว" หรือ "สามเหลี่ยม" และเชื่อมต่อกับเครือข่ายแรงดันไฟฟ้า แกนแม่เหล็กทำจากเหล็กเคลือบด้วยไฟฟ้า (ทำจากแผ่นบาง)
อย่างที่ฉันพูดไปก่อนหน้านี้ โรเตอร์ในอะซิงโครนัสมอเตอร์มีเพียง 2 ประเภทเท่านั้น: นี่คือประเภทโรเตอร์แบบเฟสและแบบกรงกระรอก วงจรแม่เหล็กของโรเตอร์ยังทำจากเหล็กไฟฟ้าเคลือบ โรเตอร์กรงกระรอกมีรูปลักษณ์ที่เรียกว่า "กรงกระรอก" เนื่องจากมีความคล้ายคลึงกันของการออกแบบกับกรงนี้ กรงนี้ประกอบด้วยแท่งทองแดงซึ่งลัดวงจรด้วยวงแหวน แท่งถูกสอดเข้าไปในร่องของแกนโรเตอร์โดยตรง เพื่อปรับปรุงลักษณะการเริ่มต้นของ AM ด้วยโรเตอร์ประเภทนี้ มีการใช้รูปร่างร่องพิเศษ ทำให้สามารถใช้เอฟเฟกต์การกระจัดปัจจุบันได้ ซึ่งส่งผลต่อการเพิ่มความต้านทานเชิงแอ็คทีฟของขดลวดโรเตอร์ในระหว่างการสตาร์ท (สลิปขนาดใหญ่ ). ด้วยตัวเอง IM ที่มีโรเตอร์กรงกระรอกมีแรงบิดเริ่มต้นเล็กน้อยซึ่งส่งผลเสียต่อพื้นที่การใช้งาน พวกเขาพบการกระจายมากที่สุดในระบบที่ไม่ต้องการขนาดใหญ่ ช่วงเวลาเริ่มต้น. อย่างไรก็ตาม โรเตอร์ประเภทนี้แตกต่างกันตรงที่เงินในการบำรุงรักษาน้อยกว่าการบำรุงรักษามอเตอร์ที่มีโรเตอร์โรเตอร์ เนื่องจากไม่มีการสัมผัสทางกายภาพในประเภทโรเตอร์กรงกระรอก
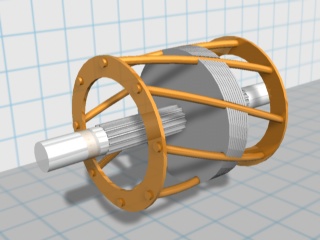
รูปที่ 2 - ความดันโลหิตของโรเตอร์ "กรงกระรอก"
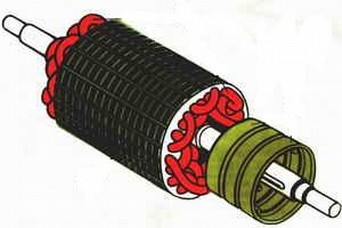
เฟสโรเตอร์ประกอบด้วย ขดลวดสามเฟสมักเชื่อมต่อตามรูปแบบ "ดาว" และแสดงบนวงแหวนสลิปที่หมุนด้วยเพลา แปรงทำจากกราไฟท์ เฟสโรเตอร์มีข้อดีหลายประการ เช่น การสตาร์ทแบบสตาร์-เดลต้า การควบคุมความเร็วโดยการเปลี่ยนความต้านทานของโรเตอร์
โหมดการทำงาน
เพิ่มเติมที่ต้องพิจารณา
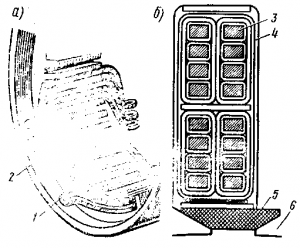
อุปกรณ์สเตเตอร์ มอเตอร์เหนี่ยวนำเช่นเดียวกับเครื่องจักรไฟฟ้าประกอบด้วยสเตเตอร์และโรเตอร์ (รูปที่ 3.1, a) สเตเตอร์มีรูปทรงกระบอก ประกอบด้วยร่างกาย / แก่น 2 และขดลวด 3. ร่างกายหล่อ ในกรณีส่วนใหญ่เหล็กหรือเหล็กหล่อ แกนสเตเตอร์ประกอบขึ้นจากแผ่นเหล็กไฟฟ้าบาง ๆ (รูปที่ 3.1, b)
แผ่นงานสำหรับเครื่องจักรที่ใช้พลังงานต่ำไม่ได้หุ้มด้วยสิ่งใดๆ เนื่องจากชั้นออกไซด์ที่เกิดขึ้นบนแผ่นนั้นเป็นฉนวนที่เพียงพอ เหล็กแผ่นที่ประกอบเป็นชุดสเตเตอร์ซึ่งถูกกดเข้าไปในตัวเรือนสเตเตอร์ บนพื้นผิวด้านในของแกนกลางร่องจะถูกตัดโดยวางขดลวดสเตเตอร์ ขดลวดสเตเตอร์สามารถเชื่อมต่อแบบดาวหรือเดลต้าได้ ในการเชื่อมต่อดังกล่าว จะมีกล่องบนตัวเรือนเครื่องยนต์ซึ่งจะนำจุดเริ่มต้นของเฟสออกมา C1, C2, NWและสิ้นสุดเฟส C4, C5, C6.ในรูป 3.2, a-cแสดงเค้าโครงของข้อสรุปเหล่านี้และวิธีเชื่อมต่อระหว่างเฟสกับรูปดาวและรูปสามเหลี่ยม แผนภาพการเชื่อมต่อของขดลวดสเตเตอร์ขึ้นอยู่กับแรงดันไฟฟ้าของมอเตอร์และ พิกัดแรงดันไฟฟ้าเครือข่าย ตัวอย่างเช่นหนังสือเดินทางเครื่องยนต์ระบุ 380/220 ตัวเลขแรกสอดคล้องกับรูปแบบการเชื่อมต่อของขดลวดในดาวเมื่อ แรงดันไฟฟ้าในเครือข่าย 380 V และครั้งที่สอง - ในการเชื่อมต่อแบบเดลต้าที่มีแรงดันไฟฟ้าเครือข่ายเชิงเส้น 220 V ในทั้งสองกรณี แรงดันไฟฟ้าที่เฟสคดเคี้ยวจะเป็น 220 V
ตัวเรือนสเตเตอร์ปิดจากปลายด้วยแผ่นป้องกันลูกปืนซึ่งกดตลับลูกปืนของเพลาโรเตอร์
อุปกรณ์โรเตอร์
โรเตอร์ของมอเตอร์เหนี่ยวนำประกอบด้วยเพลาเหล็ก 4
(รูปที่ 3.1, a) ที่แกนถูกกด 5,
ทำเช่นเดียวกับแกนสเตเตอร์จากแผ่นเหล็กไฟฟ้าที่แยกจากกันโดยมีร่องปิดหรือกึ่งปิดประทับอยู่ ขดลวดโรเตอร์มีสองประเภท: ลัดวงจรและเฟส - ตามลำดับ โรเตอร์เรียกว่าลัดวงจรและเฟส 
มอเตอร์ที่มีโรเตอร์แบบกรงกระรอกนั้นมีอยู่ทั่วไปมากกว่า เนื่องจากมีราคาถูกกว่าและง่ายต่อการผลิตและใช้งาน ส่วนที่เป็นสื่อกระแสไฟฟ้าของโรเตอร์ที่เรียกว่าโรเตอร์ M.O. Dolivo-Dobrovolsky พร้อมกรงกระรอกประกอบด้วยแท่งทองแดงหรืออลูมิเนียมลัดวงจรที่ปลาย (รูปที่ 3.3) โดยปกติกรงกระรอกจะถูกสร้างขึ้นโดยการเทอลูมิเนียมหลอมเหลวลงในร่องของโรเตอร์
เฟสโรเตอร์ (รูปที่ 3.4) มีสามขดลวดเชื่อมต่อกันเป็นดาว ตัวนำที่คดเคี้ยวเชื่อมต่อกับวงแหวน 2 ซึ่งติดอยู่กับเพลา 3 ในระหว่างการเริ่มต้นใช้งาน แปรงแบบตายตัว 4 จะถูกกดลงบนวงแหวนซึ่งเชื่อมต่อกับรีโอสแตต 5