Механічною характеристикою двигунаназивається залежність частоти обертання ротора від моменту валу n = f (M2). Так як при навантаженні момент холостого ходу малий, то M2 M і механічна характеристика представляється залежністю n = f (M). Якщо врахувати взаємозв'язок s = (n1 – n)/n1, то механічну характеристику можна отримати, представивши її графічну залежність у координатах n та М (рис. 1).
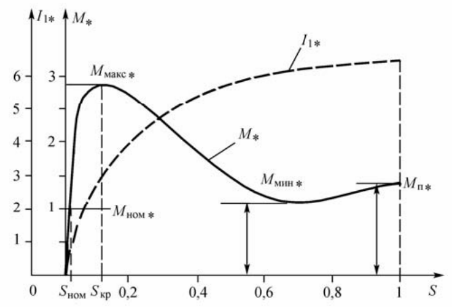
Рис. 1. Механічна характеристика асинхронного двигуна
Природна механічна характеристика асинхронного двигунавідповідає основній (паспортній) схемі його включення та номінальним параметрам напруги живлення. Штучні характеристикивиходять, якщо включені будь-які додаткові елементи: резистори, реактори, конденсатори. При живленні двигуна не номінальною напругоюПоказники також від природної механічної характеристики.
Механічні характеристики є дуже зручним та корисним інструментом при аналізі статичних та динамічних режимів електроприводу.
Основні точки механічної характеристики: критичне ковзання і частота, максимальний момент, пусковий момент, номінальний момент.
Механічна характеристика - це залежність крутного моменту від ковзання, або, інакше кажучи, від кількості обертів:
![]()
З виразу  видно, що ця залежність дуже складна, оскільки, як свідчать формули)
видно, що ця залежність дуже складна, оскільки, як свідчать формули)  і
і  , ковзання входить також у вирази для I 2
і cos? 2. Механічна характеристика асинхронного двигуна дається зазвичай графічно
, ковзання входить також у вирази для I 2
і cos? 2. Механічна характеристика асинхронного двигуна дається зазвичай графічно
Початкова точка характеристики відповідає n= 0 і s= 1: це перша мить запуску двигуна. Величина пускового крутного моменту M n - Дуже важлива характеристика експлуатаційних властивостей двигуна. Якщо M n малий, менший за номінальний робочий момент, двигун може запускатися тільки вхолосту або при відповідно зниженому механічному навантаженні.
Позначимо символом M np протидіє (гальмівний) момент, створюваний механічним навантаженням на валу, при якій двигун пускається. Очевидною умовою для можливості запуску двигуна є: M n > M np . Якщо ця умова виконана, ротор двигуна почне рухатися, число оборотів його nзростатиме, а ковзання sзменшуватись. Як видно з зображення вище, крутний момент двигуна при цьому росте від M n до максимального M m , що відповідає критичному ковзанню s kp, отже, зростає і надмірна потужність двигуна, що визначається різницею моментів Mі M np .
Чим більша різниця між моментом двигуна (можливим при даному ковзанні за робочою характеристикою) М та протидіючим М np , тим легше режим запуску і тим швидше двигун досягає швидкості обертання.
Як показує механічна характеристика, при певній кількості оборотів (при s = s kp) наявний крутний момент двигуна досягає максимально можливого для даного двигуна(при даній напрузі U ) значення M т . Далі двигун продовжує збільшувати швидкість обертання, але наявний крутний момент його швидко зменшується. При якихось значеннях nі sкрутний момент двигуна стає рівним протидіє: пуск двигуна закінчується, число оборотів його встановлюється на значенні, що відповідає співвідношенню:
![]()
Це співвідношення є обов'язковим для всіх режимів навантаження двигуна, тобто для всіх значень M np , що не виходять за межі максимального обертального моменту двигуна М т . У цих межах двигун сам автоматично пристосовується до всіх коливань навантаження: якщо під час роботи двигуна його механічне навантаження збільшується, на якусь мить M npстане більше моменту, що розвивається двигуном. Оберти двигуна почнуть знижуватися, а момент збільшуватись.
Швидкість обертання встановиться на новому рівні, що відповідає рівності M і M np . При зниженні навантаження процес переходу до нового режиму навантаження буде зворотним.
Якщо навантажувальний момент M np перевищить М т , Двигун відразу зупиниться, так як з подальшим зменшенням оборотів крутний момент двигуна зменшується.
Тому максимальний момент двигуна М тназивається ще перекидальним або критичним моментом.
Якщо у формулу моменту ![]() підставити:
підставити:
то отримаємо:
Взявши першу похідну від М і прирівнявши її до нуля, знайдемо, що максимальне значення крутного моменту настає за умови:
тобто при такому ковзанні s = s kp , при якому активний опір ротора дорівнює індуктивному опору
![]()
Значення s kp у більшості асинхронних двигунів лежать не більше 10 - 25%.
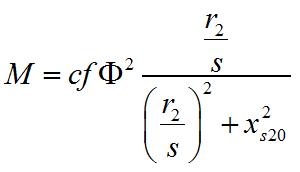
Якщо у написану вище формулу моменту замість активного опору r 2 підставити індуктивне за формулою
![]()
Максимальний момент, що обертає, асинхронного двигуна пропорційний квадрату магнітного потоку (а значить, і квадрату напруги) і назад пропорційний індуктивності розсіювання обмотки ротора.
При сталості напруги, що підводиться до двигуна, його потік Ф залишається майже незмінним.
Індуктивність розсіювання роторного ланцюга теж практично стала. Тому при зміні активного опору в ланцюзі ротора максимальне значення крутного моменту M т змінюватися не буде, але наступатиме при різних ковзаннях (зі збільшенням активного опору ротора - при великих значеннях ковзання).
Очевидно, що максимум можливого навантаження двигуна визначається значенням його M т . Робоча частина характеристики двигуна лежить у вузькому діапазоні чисел обертів від n, відповідного M т , до. При n = n 1 (кінцева точка характеристики) М = 0, тому що при синхронній швидкості ротора s = 0 і I 2 = 0.
Номінальний крутний момент, що визначає значення паспортної потужності двигуна, приймається зазвичай рівним 0,4 - 0,6 від M т . Таким чином, асинхронні двигуни допускають короткочасні навантаження у 2 - 2,5 рази.
Основним параметром, що характеризує режим роботи асинхронного двигуна, є ковзання s - відносна різниця частоти обертання ротора двигуна n та його поля n про: s = (n o - n) / n o .
Область механічної характеристики, що відповідає 0 ≤ s ≤ 1 - область рухових режимів, причому при s< s кр работа двигателя устойчива, при s >s кр – нестійка. При s< 0 и s >1 момент двигуна спрямований проти напрямку обертання його ротора (відповідно рекуперативне гальмування та гальмування противключенням).
Стійка ділянка механічної характеристики двигуна часто описується формулою Клосса, підстановкою в яку параметрів номінального режиму можна визначити критичне ковзання s кр:
 ,
,
де: λ = M kp / M н – перевантажувальна здатність двигуна.
Механічна характеристика за даними довідника чи каталогу приблизно може бути побудована за чотирма точками (рис. 7.1):
Точка 1 – ідеальний холостий хід, n = n o = 60 f/p, М = 0, де: р – число пар полюсів магнітного полядвигуна;
Точка 2 - номінальний, режим: n = n н, М = М н = 9550 P н / n н, де P н - номінальна потужністьдвигуна у кВт;
Точка 3 - критичний режим: n = n кр, М = М кр = М н;
Точка 4 – режим пуску: n = 0, М = М пуск = β М н.
При аналізі роботи двигуна в діапазоні навантажень до М н і дещо більше стійку ділянку механічної характеристики можна приблизно описати рівнянням прямої лінії n = n 0 - вМ, де коефіцієнт "в" легко визначається підстановкою в рівняння параметрів номінального режиму n н і М н.
Конструкція статора обмоток. Одношарові та двошарові петлеві обмотки.
За конструкцією котушок обмотки поділяють на всипні з м'якими котушками і обмотки з жорсткими котушками або напівкотушками. М'які котушки виготовляють із круглого ізольованого дроту. Для надання необхідної форми їх попередньо намотують на шаблони, а потім укладають в ізольовані трапецеїдальні пази (див. рис. 3.4, в, гта 3.5, в); міжфазові ізоляційні прокладки встановлюють у процесі укладання обмотки. Потім котушки зміцнюють у пазах за допомогою клинів або кришок, надають їм остаточної форми (формують лобові частини), здійснюють бандажування обмотки та її просочення. Весь процес виготовлення всипних обмоток можна повністю механізувати.
Жорсткі котушки (напівкотушки) виготовляють із прямокутного ізольованого дроту. Остаточну форму їм надають до укладання пази; одночасно на них накладають корпусну та міжфазову ізоляцію. Потім котушки укладають у попередньо ізольовані відкриті або напіввідкриті пази , зміцнюють і піддають просоченню.
1. Одношарові обмотки- найбільш придатні для механізованого укладання, тому що в цьому випадку обмотка повинна бути концентричною і укладатися в пази статора обома сторонами котушки одночасно. Однак застосування їх призводить до збільшеної витрати обмотувального дроту через значну довжину лобових частин. Крім того, в таких обмотках неможливо виконати укорочення кроку, що призводить до погіршення форми магнітного поля в повітряному зазорі, збільшення додаткових втрат, виникнення провалів в механічною характеристикоюта підвищення шуму. Однак через свою простоту і дешевизну такі обмотки широко застосовують у асинхронних двигунахневеликої потужності до 10-15 кВт.
2. Двошарові обмотки- дозволяють виконати укорочення кроку обмотки на будь-яку кількість зубцевих поділів, завдяки чому покращується форма магнітного поля, створюваного обмоткою, і пригнічуються вищі гармонійні кривої ЕРС. Крім того, при двошарових обмотках виходить простіша форма лобових з'єднань, що спрощує виготовлення обмоток. Такі обмотки застосовують для двигунів потужністю понад 100 кВт із твердими котушками, які укладають вручну.
Обмотки статора.Одношарові та двошарові хвильові обмотки
У пазах сердечника статора розміщується багатофазна обмотка, яка приєднується до мережі змінного струму. Багатофазні симетричні обмотки з числом фаз твключають тфазних обмоток, які з'єднуються у зірку чи багатокутник. Так, наприклад, у випадку трифазної обмоткистатора число фаз т = 3 та обмотки можуть з'єднуватися в зірку або трикутник. Між собою обмотки фаз зміщені на кут 360/ тград; для трифазної обмотки цей кут дорівнює 120 °.
Обмотки фаз виконуються з окремих котушок, з'єднаних послідовно, паралельно чи послідовно-паралельно. В даному випадку під котушкоюмаються на увазі кілька послідовно з'єднаних витків обмотки статора, розміщених в одних і тих же пазах і мають загальну ізоляцію щодо стінок паза. В свою чергу виткомвважаються два активних (тобто розташованих у самому сердечнику статора) провідника, покладених у двох пазах під сусідніми різноіменними полюсами і з'єднаних один з одним послідовно. Провідники, розташовані поза сердечником статора і що з'єднують активні провідники між собою, називаються лобовими частинами обмотки. Прямолінійні частини котушок обмоток, покладені в пази, називаються сторонами котушок або пазовими частинами.
Пази статора, які укладаються обмотки, утворюють на внутрішній стороні статора так звані зубці. Відстань між центрами двох сусідніх зубців сердечника статора, виміряна по поверхні, зверненої до повітряного зазору, називається зубцевим розподіломабо пазовим розподілом.
Багатошарові циліндричні котушкові обмотки (малюнок 3) намотуються з круглого дроту і складаються з багатошарових котушок дискових, розташованих уздовж стрижня. Між котушками (через кожну котушку або через дві-три котушки) можуть бути залишені радіальні канали для охолодження. Такі обмотки застосовуються на стороні вищої напруги при Sст ≤ 335 кВ×А, Iст ≤ 45 А та Uл.н ≤ 35 кВ.
Одношарові та двошарові циліндричні обмотки (рисунок 4) намотуються з одного або декількох (до чотирьох) паралельних прямокутних провідників і застосовуються при Sст ≤ 200 кВ×А, Iст ≤ 800 А та Uл.н ≤ 6 кВ.
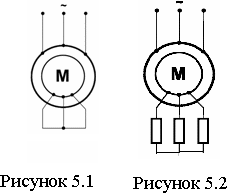
Асинхронний короткозамкнутий електродвигун (рисунок 5.1) та АТ з фазним ротором (рисунок 5.2) широко поширені в електроприводі завдяки великому ресурсу безвідмовної роботи, високим показникам у роботі, хорошим регулювальним властивостям.
На малюнку 5.3 представлена схема заміщення однієї фази електродвигуна з урахуванням параметрів контуру, що намагнічує, з активним r mта індуктивним x m опорами.
У схемі заміщення:
r 1 - Активний опір фази статорної обмотки;
r 2 ′ - наведений до статора активний опір фази роторної обмотки;
x 1 - індуктивний опір фази обмотки статора;
x 2 ′ - наведений до статора індуктивний опір фази роторної обмотки;
x m- Індуктивний опір контуру намагнічування.
Відповідно до схеми заміщення, роторний струм I 2 ' має значення
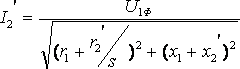
З (5.1) випливає, що роторний струм I 2 ’ залежить від ковзання s, тобто. від частоти обертання ротора машини, оскільки
Зауважимо, що при пуску ковзання s = 1(поточне значення частоти обертання w = 0), а при частоті обертання w=w 0 ідеального холостого ходу ковзання одно s = 0. Зі співвідношення слід також, що при пуску роторний струм досягає максимального значення I 2к ’ @ (8¸10)I ном, і його слід обмежувати.
Частота струму ротора f p при значенні частоти f c мережевої напруги f p = f c ×s,отже, при пуску s=1асинхронна машина може бути представлена трансформатором напруги, оскільки f p =f c =50Гц. У міру розгону двигуна та його роботі з номінальним ковзанням s н, яке не перевищує s н 0,1 ; падає і частота роторного струму f p = 1..5 Гц.
Потужність Р 1 , що споживається АТ з мережі, витрачається на покриття втрат у контурі намагнічування ∆Р mта в обмотці статора ∆Р 1 , залишок її перетворюється на електромагнітну потужність Р Е , яка дорівнює
![]()
У свою чергу, , і, вирішуючи спільно і знаходимо значення електромагнітного моменту
 .
.
Залежність (5.4) є описом механічної характеристики АТ і є складною залежністю моменту АТ від ковзання. Досліджуємо її на екстремум, взявши похідну та прирівнявши її нулю:
Залежність має максимум при критичному значенні ковзання, що дорівнює
та критичному (максимальному) моменті
Зауважимо, знак (+) відноситься до рухового режиму, а знак (-) до генераторного режиму машини.
Для практичних розрахунків зручніше використовувати формулу Клосса, отриману з виразів
 де .
де .
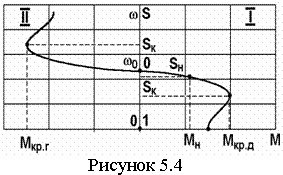
У великих асинхронних машинах r 1 << r 2 ’ , і ε ≈0. Механічна характеристика АТ має вигляд, зображений малюнку 2.4. Характерні точки характеристики:
1- s=0; М = 0при цьому швидкість двигуна дорівнює синхронній;
2- s=s ном , М = М ном- номінальний
режим роботи двигуна;
3- s = s до , М = М кр.д- максимальний момент у руховому режимі;
4- s = 1, М = М п- Початковий пусковий момент;
5- s = -s до , М = М кр.г- максимальний момент у генераторному режимі.
Аналізуючи вплив напруги живлення Uна механічні характеристики електродвигуна, маємо на підставі співвідношень (5.6) та (5.7), що критичне ковзання s дозалишається постійним при зниженні напруги, а критичний момент M кр.дзменшується пропорційно квадрату напруги живлення (рисунок 5.5).
При зниженні напруги до значення 0,9×U ном, тобто. на 10% від U ном, критичний момент M кр.дзменшується на 19%. При зниженні напруги живлення для розвитку колишнього значення моменту двигун повинен працювати з великими роторними струмами. 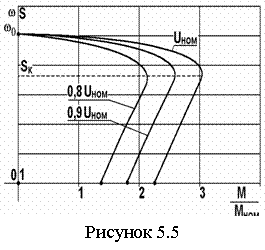
При проектуванні електродвигуна слід переконатися, що значення пускового ( s = 1) та критичного моментів ( s = s до) при мінімально можливому напрузі задовольняють вимогам робочої машини.
Аналізуючи вплив активного опору, що вводиться в роторний ланцюг, на підставі співвідношень (5.5)-(5.6), що зі збільшенням роторного 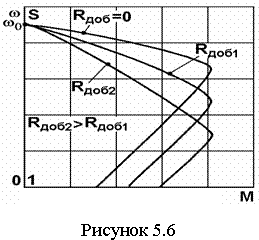
опору, який стає рівним ( r 2 ’ + R доб), збільшується критичне ковзання S до, але величина критичного моменту двигуна M кр.дзалишається без зміни.
Механічні характеристики наведено на малюнку 12. Метод використовується для запуску машини, коли на час пуску в роторний ланцюг включається значне за величиною R доб . Діаграма запуску аналогічна діаграмі запуску двигуна постійного струму незалежного збудження. Для розрахунку штучних механічних характеристик при введенні опору R добу роторний ланцюг використовується співвідношення
![]()
де s іі s e- ковзання відповідно на штучній та природній характеристиках.
Знаючи величину R доб, що вводиться в роторний ланцюг, для тих же значень моменту за співвідношенням (5.8) проводиться розрахунок ковзань s і на штучній характеристиці.
Введення активно - індуктивних опорів у роторний ланцюг машини (рисунок 14) використовується для підтримки більшої сталості пускового моменту машини в порівнянні з природною характеристикою машини - механічна характеристика машини в області ковзань 1
Критичний момент машини M кр.дта критичне ковзання s до
машини змінюються відповідно до співвідношенням. Введення активних та індуктивних опорів у статорний ланцюг машини (малюнок) використовується для зменшення кидка пускового струму машини, оскільки напруга безпосередньо на затискачах статора стає функцією струму і в міру зменшення пускового струму (розгін) зазначена напруга зростає і відновлюється до значення, близького до U ном .
Виведення активних та індуктивних опорів зі статорного ланцюга машини здійснюється релейно - контакторною або безконтактною схемою. 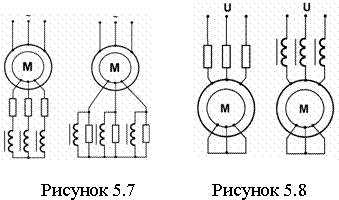
Асинхронні двигуни (АТ) – найпоширеніший вид двигунів, т.к. вони більш прості та надійні в експлуатації, при рівній потужності мають меншу масу, габарити та вартість порівняно з ДПТ. Схеми включення АТ наведено на рис. 2.14.
Донедавна АТ з короткозамкненим ротором застосовувалися в нерегульованих електроприводах. Однак з появою тиристорних перетворювачів частоти (ТПЧ) напруги, що живить статорні обмотки АТ, двигуни з короткозамкненим ротором почали використовуватися в електроприводах, що регулюються. В даний час в перетворювачах частоти застосовуються силові транзистори та програмовані контролери. Спосіб регулювання швидкості отримав назву імпульсного та його вдосконалення є найважливішим напрямом у розвитку електроприводу.
Рис. 2.14. а) схема включення АТ із короткозамкненим ротором;
б) схема включення АТ із фазним ротором.
Рівняння для механічної характеристики АТ може бути отримано виходячи з схеми заміщення АТ. Якщо в цій схемі знехтувати активним опором статора, то вираз для механічної характеристики матиме вигляд:
![]() ,
,
Тут М до -критичний момент; S до- відповідне йому критичне ковзання; U ф- Чинне значення фазної напруги мережі; ω 0 =2πf/p- Кутова швидкість обертового магнітного поля АТ (синхронна швидкість); f- Частота напруги живлення; p- Число пар полюсів АТ; х до– індуктивний фазний опір короткого замикання (визначається із схеми заміщення); S=(ω 0 -ω)/ω 0- ковзання (швидкість ротора щодо швидкості обертового поля); R 2 1- Сумарний активний опір фази ротора.
Механічна характеристика АТ із короткозамкненим ротором наведена на рис. 2.15.
Рис. 2.15. Механічна характеристика АТ із короткозамкненим ротором.
На ній можна виділити три характерні точки. Координати першої точки ( S=0; ω=ω 0; М = 0). Вона відповідає режиму ідеального холостого ходу, коли швидкість ротора дорівнює швидкості магнітного поля, що обертається. Координати другої точки ( S=S до; М = М до). Двигун працює з максимальним моментом. При М з >М доротор двигуна буде примусово зупинено, що двигун є режимом короткого замикання. Тому крутний момент двигуна в цій точці і називається критичним М до. Координати третьої точки ( S=1; ω=0; М = М п). У цій точці двигун працює в режимі пуску: швидкість ротора ω=0 і на нерухомий ротор діє пусковий момент М п. Ділянка механічної характеристики, розташована між першою та другою характерними точками, називається робочою ділянкою. На ньому двигун працює в режимі, що встановився. У АТ з короткозамкненим ротором під час виконання умов U=U ні f=f нМеханічна характеристика називається природною. У цьому випадку на робочій ділянці характеристики розташована точка, що відповідає номінальному режиму роботи двигуна та має координати ( S н; ω н; М н).
Електромеханічна характеристика АТ ω=f(I ф), Яка на рис.2.15 зображена штриховою лінією, на відміну від електромеханічної характеристики ДПТ, збігається з механічною характеристикою лише на її робочій ділянці. Це пояснюється тим, під час пуску через частоту е.д.с, що змінюється. в обмотці ротора Е 2змінюється частота струму та співвідношення індуктивного та активного опорів обмотки: на початку пуску частота струму більша та індуктивний опір більше активного; зі збільшенням швидкості обертання ротора ω частота струму ротора, отже, і індуктивний опір його обмотки, зменшується. Тому пусковий струм АТ у режимі прямого пуску в 5÷7 разів перевищує номінальне значення I фн, а пусковий момент М пдорівнює номінальному М н. На відміну від ДПТ, де при пуску необхідно обмежувати пусковий струм та пусковий момент, при пуску АТ пусковий струм необхідно обмежувати, а пусковий момент збільшувати. Остання обставина найважливіша, оскільки ДПТ із незалежним збудженням запускається при М з<2,5М н , ДПТ з послідовним збудженням при М з<5М н , а АТ при роботі на природній характеристиці при М з<М н .
У АТ з короткозамкненим ротором збільшення М пзабезпечується спеціальною конструкцією обмотки ротора. Паз для обмотки ротора роблять глибоким, а саму обмотку розташовують у два шари. При пуску двигуна частота Е 2і струми ротора великі, що призводить до появи ефекту витіснення струму - струм протікає лише у верхньому шарі обмотки. Тому збільшується опір обмотки та пусковий момент двигуна. М П. Його величина може досягати 1,5М н.
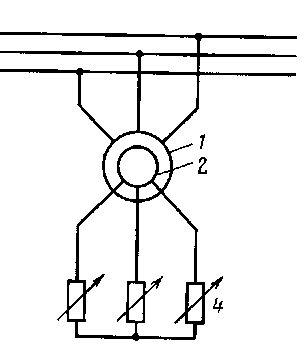
У АТ з фазним ротором збільшення М Пзабезпечується з допомогою зміни його механічної характеристики. Якщо опір R П, включене в ланцюг протікання струму ротора, дорівнює нулю - двигун працює на природній характеристиці М П = М Н. При R П >0збільшується сумарний активний опір фази ротора R 2 1. Критичне ж ковзання S доу міру збільшення R 2 1теж збільшується. Внаслідок цього у АТ з фазним ротором введення R Пу ланцюг протікання струму ротора призводить до зміщення М Ку бік великих ковзань. При S К = 1 М П = М К.Механічні характеристики АТ з фазним ротором при R П >0називаються штучними чи реостатними. Вони наведені на рис. 2.16.
Рис. 2.16. Механічні характеристики АТ із фазним ротором.
Асинхронний двигун із короткозамкненим ротором запуститься при М п >М зі працюватиме у точці А (див. рис. 2.15). Після цього момент опору М зможна збільшувати до М К. АТ, як і двигуни постійного струму, зі збільшенням М збуде автоматично, без втручання ззовні, знижувати швидкість ω і збільшувати крутний момент Мдоти поки Мі М зне зрівняються за величиною, тобто. з встановленого режиму з більшою швидкістю переходити в режим з меншою швидкістю. При зменшенні М збуде спостерігатися зворотне - двигун з режиму, що встановився, з меншою швидкістю буде автоматично переходити в режим, що встановився з більшою швидкістю. Робоча ділянка механічної характеристики АТ аналогічна механічній характеристиці ДПТ з незалежним збудженням – пряма лінія, нахилена до осі абсцис.
Такими властивостями АТ має завдяки е.р.с. Е 2, яка наводиться магнітним полем статора, що обертається, в обмотці ротора. При М з >Мдинамічний момент М д<0 та швидкість ротора ω зменшується. Магнітне поле статора, що обертається із постійною швидкістю ω 0 (Синхронною швидкістю) буде перетинати обмотку ротора з великою частотою. Тому буде збільшуватись Е 2, Струм в обмотці ротора, сила Ампера, що діє на її витки, а значить і крутний момент М.
Перевантажувальна здатність АТ по моменту визначається ставленням критичного моменту М Кдо моменту номінального М Н. Для звичайних АТ із короткозамкненим ротором М К / М Н = 1,7з фазним ротором М К / М Н = 1,8. Для спеціальних кранових АТ з короткозамкненим ротором типу МТК та фазним ротором типу МТКФ відношення М К / М Н = 2,3÷3,4.
В результаті взаємодії магнітного поля зі струмами в роторі асинхронного двигуна створюється електромагнітний момент, що обертає, що прагне зрівняти швидкість обертання магнітного поля статора і ротора.
Різниця швидкостей обертання магнітного поля статора та ротора асинхронного двигунахарактеризується величиною ковзання s = (n1 - n2) / n2, де n1 - синхронна швидкість обертання поля, об/хв, n2 - швидкість обертання ротора асинхронного двигуна, об/хв.При роботі з номінальним навантаженням ковзання зазвичай мало, так для електродвигуна, наприклад, з n1 = 1500 об/хв, n2 = 1460 об/хв, ковзання дорівнює: s = ((1500 - 1460) / 1500) х 100 = 2, 7%
Не може досягти навіть три від'єднаний механізм, так як при ній провідники ротора не будуть перетинатися магнітним полем, в них не буде наводитися ЕРС і не буде струму. Асинхронний момент при s = 0 дорівнюватиме нулю.
У початковий момент пуску в обмотках ротора протікає струм із частотою мережі. У міру прискорення ротора частота струму в ньому визначатиметься ковзанням асинхронного двигуна: f2 = s х f1, де f1 - частота струму, що підводиться до статора.
Опір ротора залежить від частоти струму в ньому, причому чим більша частота, тим більший його індуктивний опір. Зі збільшенням індуктивного опору ротора збільшується зсув фаз між напругою та струмом в обмотках статора.
При пуску асинхронних двигунів коефіцієнт потужності тому значно нижчий, ніж за нормальної роботи. Розмір струму визначається еквівалентним значенням опору електродвигуната прикладеною напругою.
Величина еквівалентного опору асинхронного двигуна із зміною ковзання змінюється за складним законом. При зменшенні ковзання в межах 1 - 0,15 опір збільшується, як правило, не більше ніж в 1,5 рази, в межах від 0,15 до sн в 5-7 разів по відношенню до початкового значення при пуску.
Струм за величиною змінюється обернено пропорційно зміні еквівалентного опору Таким чином, при пуску до ковзання порядку 0,15 струм опадає незначно, а надалі швидко зменшується.
Момент обертання електродвигунавизначається величиною магнітного потоку, струмом та кутовим зсувом між ЕРС і струмом у роторі. Кожна з цих величин у свою чергу залежить від ковзання, тому для дослідження робочих характеристик асинхронних двигунів встановлюється залежність моменту від ковзання та впливу на нього напруги, що підводиться, і частоти.
Момент обертання може бути також визначений електромагнітною потужністю на валу як відношення цієї потужності до кутової швидкості ротора. Величина моменту пропорційна квадрату напруги і обернено пропорційна квадрату частоти.
Характерними значеннями моменту в залежності від ковзання (або швидкості) є початкове значення моменту(Коли електродвигун ще нерухомий), максимальне значення моменту(і відповідне йому ковзання, зване критичним) і мінімальне значення моменту у межі швидкостей від нерухомого стану до номінальної.
З моменту для номінального напруги наводяться в каталогах для електричних машин. Знання мінімального моменту необхідно для розрахунку допустимості пуску чи самозапуску механізму з повним навантаженням механізму. Тому його значення для конкретних розрахунків має бути визначено, або отримано від заводу-постачальника.
Розмір максимального значення моменту визначається індуктивним опором розсіювання статора і ротора і залежить від величини опору ротора.
Критичне ковзаннявизначається ставленням опору ротора до еквівалентного опору (обумовлено активним опором статора та індуктивним опором розсіювання статора та ротора).
Збільшення активного опору ротора супроводжується збільшенням критичного ковзання і переміщенням максимуму моменту в область більш високих ковзань (меншої швидкості обертання). Таким шляхом може бути досягнуто зміни характеристик моментів.
Зміна ковзання можливе збільшенням опору ціни ротора чи потоку. Перший варіант здійснимо тільки для асинхронних двигунів з фазним ротором (від S = 1 до S = Sном), але не економічний. Другий варіант здійснимо при зміні напруги живлення, але тільки в бік зменшення. Діапазон регулювання малий, оскільки S зростає, але одночасно зменшується здатність перевантажувати асинхронного двигуна. По економічності обидва варіанти приблизно рівноцінні.
У зміну моменту при різних ковзаннях здійснюється за допомогою опору, що вводиться в коло обмотки ротора. У асинхронних двигунахз короткозамкненим ротором зміна моменту може бути досягнуто за рахунок застосування двигунів зі змінними параметрами або за допомогою.
Правильний вибір електродвигуна для виробничого механізму – запорука його нормальної та економічної роботи. Якщо електродвигун підібраний правильно, це спростить систему керування електроприводом і, можливо, здешевить вартість електроприводу. Як відомо електропривод повинен забезпечувати не тільки сталість значень (швидкість, момент), але й динамічних (перехідних процесів, таких як прискорення, гальмівний момент, пусковий момент і т.д.).
Основним критерієм для підбору електродвигунів використовують залежність, де відображають значення моменту М електродвигуна і швидкості обертання валу n при дії цього моменту. Така залежність називається механічна характеристика n=f(M). За механічними характеристиками проводять аналіз електромеханічних властивостей двигуна, а також оцінюють доцільність застосування його для різноманітних механізмів і пристроїв. Вони можуть бути двох видів: природні та штучні.
Природні механічні характеристики: вони знімаються за впливу двигун номінальних параметрів (номінальний струм, опір обмоток, напруга, момент опору тощо.). Тобто, двигун підключається до джерела живлення без будь-яких перетворювальних пристроїв – прямим включенням.
Штучні механічні характеристики: їх знімають при введенні в ланцюг двигуна додаткових елементів (додатковий резистор) або при зниженій напрузі живлення, частоті (якщо двигун змінної напруги) і т.д. Тобто на механічну характеристику двигуна справляють штучний вплив.
Також розрізняють механічні характеристики зміни швидкості обертання валу в залежності від збільшення моменту. Вони оцінюються за жорсткістю:
і крутості нахилу:
Щоб визначити жорсткість механічної властивості потрібно знати зміну швидкості і моменту заданому ділянці залежності n=f(M). Відповідно всі розрахунки жорсткості ведуться або у відсотках, або у відносних одиницях.
Також механічні характеристики можна відсортувати за групами:
- Жорстка – коли швидкість зменшується трохи зі збільшенням моменту навантаження. Як приклад двигуни постійного струму незалежного збудження ДПТ НВ або лінійна частина характеристики асинхронного двигуна.
- М'яка – зі збільшенням моменту навантаження зміни у швидкості обертання досить суттєві. До таких відносять двигуни постійного струму послідовного порушення ДПТ ПВ.
Нижче наведено графік різних механічних характеристик електродвигунів:
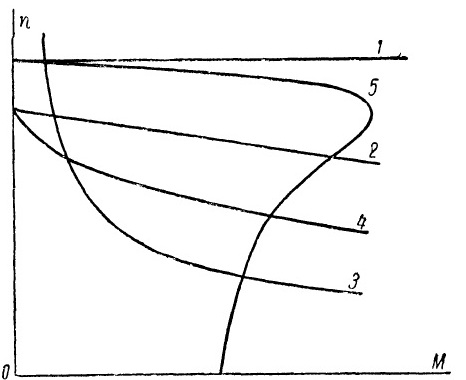
- – це абсолютно жорстка синхронна машина
- - Жорстка ДПТ НВ
- - м'яка ДПТ ПВ
- - м'яка ДПТ змішаного збудження
- – асинхронного двигуна
Підбір електродвигуна визначається вимогами виробничих механізмів. У такому виробництві як прокатка металу, виготовлення паперу або картону потрібна чітка підтримка сталості швидкості, а такі механізми, як підйомні та транспортні, не вимагають жорстких характеристик (у тягових електроприводах використовується ДПТ ПВ, також він застосовується в деяких кранових механізмах).