В машині постійного струмуобмотка якоря має малий опір і при включенні до мережі виникають пускові струми, які можуть досягати 15...20I ном. Збільшення струмів якоря вище за значення 2...2,5I ном призводить до погіршення комутації.
Крім того, динамічні зусилля, що виникають, можуть поступово зруйнувати обмотку якоря, викликати зрізання шпонок, скручування валів і т.д. Обмеження пускових струмів здійснюється за допомогою опорів r 1 , r 2 , r 3 включених в якірний ланцюг (рис.2.12). У міру розгону двигуна збільшується ЕРС, а струм знижується. Послідовно закорочуючи опори контактами КМ1, КМ2, КМЗ виконують (здійснюють) пуск. Пускова діаграма двигуна представлена на рис. 2.13.
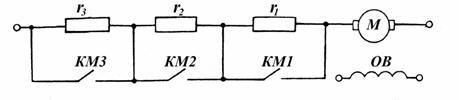
Рис. 2.13. Схема включення пускових резисторів.
Значення струмів перемикання I 1 і I 2 вибирають, виходячи з вимог технології електроприводу і комутаційної здатності двигуна. Так, приймають I 1 = (2,0...2,5)I Н і I 2 = (1,2...1,3)I Н у тих випадках, коли тривалість пуску двигуна впливає на продуктивність машини, що часто включається .
Якщо необхідно плавний пускнаприклад, пасажирських ліфтів, то значення струмів перемикання будуть зумовлені допустимими прискореннями електроприводу. У тих випадках, коли пуск рідкісний і не обмежуються умови пуску, значення струмів I 1 і I 2 можна взяти дещо більше робочих струмів (але значно менше, ніж у першому випадку, коли I 1 = (2...2,5) I н.
Значення пускових опоріврозраховують аналітичним та графічним методами. Якщо число ступенів задано, це означає, що розрахунок виконується для вже відомої стандартної контакторної панелі. Якщо кількість ступенів невідома, потрібно підібрати
Аналітичний метод розрахунку пускових опорів
При включенні двигуна до мережі розгін починається з пусковим опором R 3 = r Я + r 1 + r 2 + r 3 (рис.2.13). Цим опорам відповідає штучна електро механічна характеристика
1 - 2 - ω 0 (рис.2.14). При струмі I 2 і швидкості 2 (точка 2) контактами КМЗ шунтується додатковий опір r 3 і струм двигуна знову збільшується до I 1 (точка 3). Пуск продовжується з опором R 3 = r Я + r 1 + r 2 за характеристикою З - 4 - о. У точці 4 цієї характеристики відбувається відключення r 2 контактом КМ2. З опіром
R 3 = r Я + r 1 двигун розганяється за характеристикою 5 - 6 - о. На швидкості ω 6 (точка 6) відключається останній опір r 1 і двигун виходить на природну електромеханічну характеристику 7 - 8 - ω про, по якій розганяється до частоти обертання, що відповідає навантаженню на валу.
Для визначення значень додаткових опорів беремо відношення струмів, що відповідають точкам 3 і 2 на кутовій швидкості 2 пускової діаграми:
![]() . (2.31)
. (2.31)
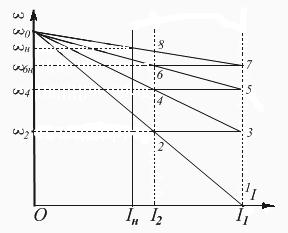
Рис. 2.14. Пускова діаграма ДПТ НВ.
Значення ЕРС двигуна в цих точках рівні, так як частота обертання ω 2 НЕ ЗМІНЮЄТЬСЯ
Після скорочення напруги отримаємо:
![]() .
.
На кутовій швидкості 4 для точок 4-5 запишемо:
![]() ;
;
тут Е4 = Е5, а струми I5 = I1, I4 = I2, отже:
![]() .
.
Аналогічно для кутової швидкості 6 (точок 6 і 7):
![]()
або ![]() .
.
Позначимо відношення струмів перемикання: , тоді
Якщо було б m ступенів, то за аналогією:
У цьому виразі число пускових щаблів m і кратність пускових струмів взаємопов'язані:
![]() (2.34) або . (2.35)
(2.34) або . (2.35)
Значення опорів кожного ступеня можна визначити так:
Порядок розрахунку пускових опорів
Якщо встановлено число ступенів m, то розрахунок опорів виконується так:
1) задаємося значенням струму I 1 і визначаємо R m:
2) знаходимо відношення струмів перемикання:
![]() , (2.37)
, (2.37)
де; Р н, U н, I н, η н - паспортні дані двигуна;
3) обчислюємо значення другого струму перемикання I 2:
і порівнюємо його з робочим струмом двигуна I с, що відповідає максимальному моменту робочої машини при пуску.
Якщо відомий робочий момент М с, то
![]() ,
,
а якщо дана потужність на валу робочої машини Р В.Р.М. , то
![]() .
.
При I 2 > (1,1...1,2)I c визначаємо опір кожного ступеня:
...![]() . (2.38)
. (2.38)
Якщо умова I 2 > 1,1I c не дотримується, то вибираємо нову
(Більше) значення I 1 і повторюємо розрахунок.
Якщо кількість ступенів опорів невідома, то розрахунок ведеться у такій послідовності:
1) задаємося значеннями струмів перемикання I 1 ,I 2 і визначаємо:
2) визначаємо число ступенів:
де; ![]() .
.
Отримане значення m (якщо воно дрібне) округляємо до
найближчого цілого числа та уточнюємо λ і струм I 2:
![]() ; .
; .
Подальший розрахунок ведеться, як у першому випадку. Після завершення розрахунків за першим чи другим варіантом необхідно перевірити правильність розрахунків. Для цього визначаємо сумарне
опір:
і порівнюємо з вихідним. Відхилення у розрахунках має бути в межах припустимої помилки – 5...7%.
Графічний метод розрахунку пускових опорів
Цей спосіб розрахунку дає наочне уявлення про значення додаткових опорів, але має істотний недолік -
точність розрахунків залежить від точності побудови пускової діаграми двигуна.
Електромеханічні характеристики для двигуна постійного струму з включеним до ланцюга якоря додатковим опором R доб. наведено на рис. 2.15.
Рис.2.15. Електромеханічні характеристики ДПТ НВ при введенні додаткових резисторів у ланцюг якоря.
Рівняння ЕРС для номінального струму та частоти обертання ω
(точка в):
Останній вираз розділимо на сФ н:
![]() . (2.39)
. (2.39)
З рис.2.15 маємо:
 (2.40)
(2.40)
Порівнюючи вирази (2.39) та (2.40), запишемо:
отже, для постійних значень I н та сФ н значення відрізка аб пропорційно . Якщо характеристика проходить через точку г , то все прикладене U н врівноважується падінням у
опорі R н:
R н носить назву номінального опору,![]() . Номінальний опір електродвигуна - е.то такий опір якірного ланцюга, при якому в момент включення (при ω=0) в обмотці якоря протікає номінальний струм. Відрізок аг пропорційний R н. Таким чином, за значенням відрізка, що відсікається характеристикою лінії номінального струму, можна розрахувати опір якірної ланцюга. Але для цього потрібно знати масштаб
. Номінальний опір електродвигуна - е.то такий опір якірного ланцюга, при якому в момент включення (при ω=0) в обмотці якоря протікає номінальний струм. Відрізок аг пропорційний R н. Таким чином, за значенням відрізка, що відсікається характеристикою лінії номінального струму, можна розрахувати опір якірної ланцюга. Але для цього потрібно знати масштаб
опорів:
де; U н, I н, Р н - номінальна напруга, Струм і потужність двигуна.
Перший спосіб визначення масштабу точніший, оскільки
відрізок аг більший, ніж відрізок аб.
При розрахунку пускових опорів двигуна постійного струму графічним методом можливі два варіанти.
1.Кількість пускових ступенів m задано.
За паспортними даними машини будуємо природну електромеханічну характеристику за двома точками (ω o , М = 0) та (I н, ω н)
(Рис. 2.16). Відкладаємо значення струмів перемикання I 1 та I 2 .
Їх значення необхідно обґрунтовувати, виходячи з вимог технології до електроприводу та комутаційної здатності двигуна. Граничне значення струму I 1 беремо рівну (2...2,5)I н. Струм I 2 = (1,2 ... 1,3) I н. Через точки, що відповідають значенням I 1 і I 2 на осі струмів проводимо дві прямі, паралельні осі частоти обертання. З'єднуємо точки 1 і ω про пряму лінію, яка перетнеться в точці 2 зі струмом I 2 .
Подальший порядок побудови від точки 2 до 3 тощо. видно з рис. 2.16. В результаті побудови необхідно потрапити в точку перетину природної електромеханічної характеристики лінії струму перемикання I 1 (точку 7). Якщо збігу не вийшло або число ступнів не дорівнює заданому, необхідно змінити значення струму I 2 або I 1 і повторити побудову.

Рис. 2.16. Графічний метод розрахунку опорів пускових
Таким чином, процес пуску двигуна в кілька щаблів, зображений на рис. 2.16 характерний тим, що струм двигуна під час пуску коливається в межах від . На початку пуску, далі, у міру прискорення двигуна зростає його ЕРС, внаслідок чого починає зменшуватися струм у ланцюгу якоря двигуна, а отже, і момент двигуна. Коли струм досягає вимикається частина пускового реостату з таким розрахунком, щоб струм двигуна знову досяг значення і т.д.
У міру виведення пускових резисторів опір ланцюга якоря зменшується, а отже, зменшується значення електромеханічної постійної, що призводить до зменшення тривалості пуску на кожному наступному ступені.
Електродвигуни постійного струму можуть мати незалежне, паралельне, послідовне чи змішане збудження (рис. 6.1).
Рис. 6.1. Схеми електродвигунів постійного незалежного струму ( а),
паралельного ( б), послідовного ( в) та змішаного ( г) порушення
(верхня частина схеми "в" належить схемі "а")
В електродвигуні паралельного збудження обмотка збудження приєднується паралельно до затискачів якоря. Але струм, що протікає по цій обмотці, на відміну від струму якоря не залежить від навантаження і визначається прикладеним до якоря напругою та загальним опором ланцюга збудження. З цієї причини електродвигун паралельного збудження називають також електродвигуном із незалежним збудженням.
Обертальний момент Мдвигуна постійного струму та його ЕРС Евизначаються за формулами
М= до Ф Iя; Е= кФω,
де до – конструктивний коефіцієнт двигуна;
Ф - магнітний потік, Вб;
Iя - струм якоря, А.
ω – кутова швидкість, рад/с.
Рівняння електромеханічної ω = ƒ ( Iя) і механічної ω = ƒ ( М) характеристик мають вигляд
ω = U/ (КФ) - ( Rя + Rр) / (до Ф) Iя;
ω = U/ (КФ) - ( Rя + Rр) / (до 2 Ф 2) М.
Кутова швидкість ідеального холостого ходу (при Iя = 0 або М = 0)
ω 0 = U/ (КФ).
На рис. 6.2 представлені механічні характеристики двигуна постійного струму із незалежним збудженням (ДПТ НВ) у всіх режимах роботи. Характерними точками характеристик у руховому режимі є: точка ідеального холостого ходу (ω 0 , М= 0); точка номінального режиму (? н, Мн); крапка короткого замикання (ω = 0, М = Мк).
Жорсткість механічної характеристики визначається потоком збудження та опором якірного ланцюга:
β = d M/ dω = - до 2 Ф 2 / ( Rя + Rр) = - Мдо/ω.
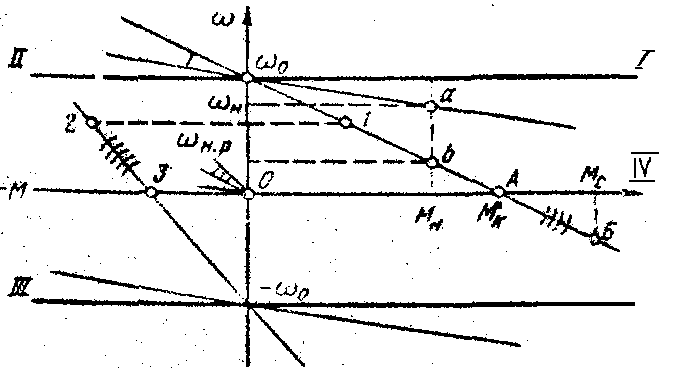
Рис. 6.2. Поєднані механічні характеристики двигуна постійного струму з незалежним збудженням
Найбільше значення модуля жорсткості відповідає природній механічній характеристиці, оскільки струм збудження дорівнює номінальному та регулювальний опір Rр = 0. У міру збільшення опору реостату Rр нахил механічної характеристики зростає, а кутова швидкість знижується. При заданому значенні опору Rр і номінальному моменті Мн кутова швидкість двигуна
ω н.р = ω 0 (1 – Iн ( Rя + Rр) / Uн.
Для розрахунку механічних характеристик необхідно знати опір якоря двигуна Rя, яке задається у каталогах. За відсутності заводських даних величину Rя знаходять орієнтовно за формулою
Rя = 0,5 (1 – ŋ н) ( Uн/ Iн).
Так як механічні характеристики ДПТ НВ прямолінійні, для їх побудови достатньо мати дві точки:
1) ω = ω 0 та М = 0,
2) ω = ω н (або ω = ω н.р) та М = Мн.
Для ДПТ НВ можливі наступні три режими електричного гальмування.
1. Рекуперативне гальмування, що відбувається, коли швидкість двигуна вище швидкості ідеального холостого ходу. Воно є найбільш економічним, оскільки енергія гальмування передається електричну мережу. Механічні характеристики у цьому режимі є продовженням відповідних характеристик рухового режиму у II квадранті. Схема двигуна при рекуперативному гальмуванні не змінюється.
2. Динамічне гальмування. Якір двигуна відключається від мережі та замикається на опір. При цьому механічна енергія рухомих частин (механізму та якоря двигуна) перетворюється на електричну, яка втрачається у вигляді теплової енергії в опорах якірного ланцюга. Механічні характеристики в даному режимі гальмування проходять через початок координат (рис. 6.2 – лінії з трьома засічками).
3. Гальмування противключеннямздійснюється двома способами:
1) введенням великого опору в ланцюг якоря.При цьому крутний момент двигуна стає меншим, ніж статичний момент навантаження. Мс. Двигун зупиняється (у точці А), а потім під дією моменту Мз починає обертатися в іншому напрямку, розвиваючи гальмівний момент; у точці Б настає встановлений режим. Механічні характеристики є продовженням відповідних характеристик рухового режиму (на рис. 6.2 – лінії із чотирма засічками);
2) гальмування перемиканням полярності обмотки якоря по ходу. Двигун, що працює у точці 1 після перемикання перейде на реостатну характеристику в точку 2. По лінії 2–3 відбувається гальмування (лінія із п'ятьма засічками). У точці 3 двигун зупиняється і його слід відключити від мережі, щоб уникнути переходу в руховий режим із обертанням у зворотному напрямку.
У двигуні постійного струму з послідовним збудженнямде-нямСтрум якоря одночасно є і струмом збудження. Магнітний потік збудження зростає зі збільшенням навантаження, внаслідок чого кутова швидкість знижується відповідно до рівняння (6.1) та механічна характеристика двигуна буде м'якою (рис. 6.3). Завдяки цьому ДПТ НВ порівняно легко та плавно долає перевантаження та має високий пусковий момент. Дані властивості двигуна дозволяють широко застосовувати його у приводі транспортних механізмів. Механічні характеристики двигуна значно пом'якшуються при введенні в ланцюг якоря реостату (рис. 6.3 лінії з однією засічкою).
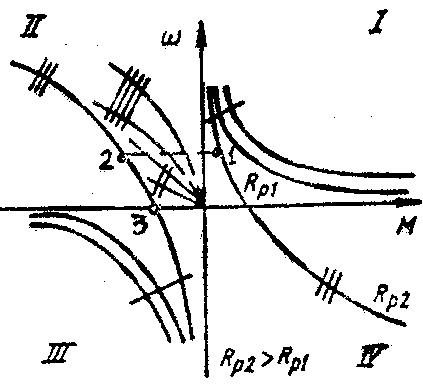
Рис. 6.3. Механічні характеристики двигуна постійного струму
з послідовним збудженням
У ДПТ ПВ не можна здійснити режим гальмування рекуперативного, оскільки в ньому відсутня швидкість ідеального холостого ходу.
Динамічне гальмування може здійснюватися за схемою із самозбудженням та з незалежним збудженням. У першому випадку якір та обмотка збудження відключаються від мережі та замикаються на реостат. Щоб уникнути розмагнічування машини, необхідно переключити обмотку збудження (або якір) таким чином, щоб напрям струму в обмотці збудження не змінилося. У цьому випадку машина самозбуджується при цьому опорі ланцюга якоря лише за певного значення кутової швидкості; збудившись, вона створює гальмівний момент. Механічні характеристики нелінійні (на рис. 6.3 – криві із чотирма засічками).
Механічні характеристики двигуна в режимі динамічного гальмування із незалежним збудженням аналогічні відповідним характеристикам двигуна із незалежним збудженням (на рис. 6.3 – лінії з двома засічками). Такий спосіб гальмування знайшов широке застосуванняа перший спосіб використовують рідко, в основному як аварійний, наприклад, при зникненні напруги мережі.
Гальмування противключенням здійснюється, як у ДПТ НВ, двома способами:
1) включенням у ланцюг якоря великого опору;
2) зміною полярності обмотки якоря, залишивши напрямок струму в обмотці збудження без зміни.
При першому способі механічна характеристика буде продовженням характеристики, що відповідає руховому режиму (рис. 6.3 – лінія з трьома засічками). При другому способі гальмування здійснюється по лінії 1 –2–3 .
Регулює швидкість електроприводів постійного струму.Швидкість ДПТ НВ можна регулювати:
1) шляхом зміни опору в ланцюзі якоря;
2) зміною потоку збудження;
3) зміною напруги, що підводиться до якоря.
Регулювання за першим способоммає суттєві недоліки:
- зменшується жорсткість механічних характеристик при зниженні кутової швидкості, а втрати потужності в головному ланцюзі зростають;
- Діапазон регулювання обмежений, особливо при малих навантаженнях;
- Невеликі плавність і точність регулювання.
З цих причин такий спосіб регулювання приводу постійного струму використовується рідко.
за другому способуможна регулювати магнітний потік тільки у бік зменшення (оскільки в номінальному режимі магнітна ланцюг двигуна насичена), що відповідає збільшенню швидкості вище номінальної. Можливий діапазон регулювання швидкості при цьому не перевищує 2 двигуна нормального виконання. Верхня межа швидкості обмежується механічною міцністю елементів якоря двигуна – бандажів обмотки якоря, колектора.
Основним способом регулювання швидкості ДПТ НВ є спосіб, заснований на зміні напруги, що підводиться до якоря, яке здійснюється за допомогою спеціального регульованого перетворювача. Як індивідуальні джерела живлення використовують в основному тиристорні перетворювачі. Жорсткість механічних характеристик приводу системою «перетворювач – ДПТ НВ» практично постійна. Механічні характеристики є сімейством паралельних один одному прямих. Діапазон, плавність, точність регулювання тут вища, ніж за інших способів регулювання. Тому дана система приводу застосовується для механізмів, що потребують глибокого та плавного регулювання швидкості.
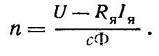
Розрахунок додаткових резисторів у ланцюзі якоря ДПТ НВ.Якщо відома природна електромеханічна або механічна характеристика 1 двигуна (рис. 6.4) та його паспортні дані, то розрахунок опору Rд, при включенні якого в ланцюг якоря бажана штучна характеристика 2 пройде через точку А із заданими координатами ω і, Iі або і, М і, можна виконати наступними найбільш поширеними методами.
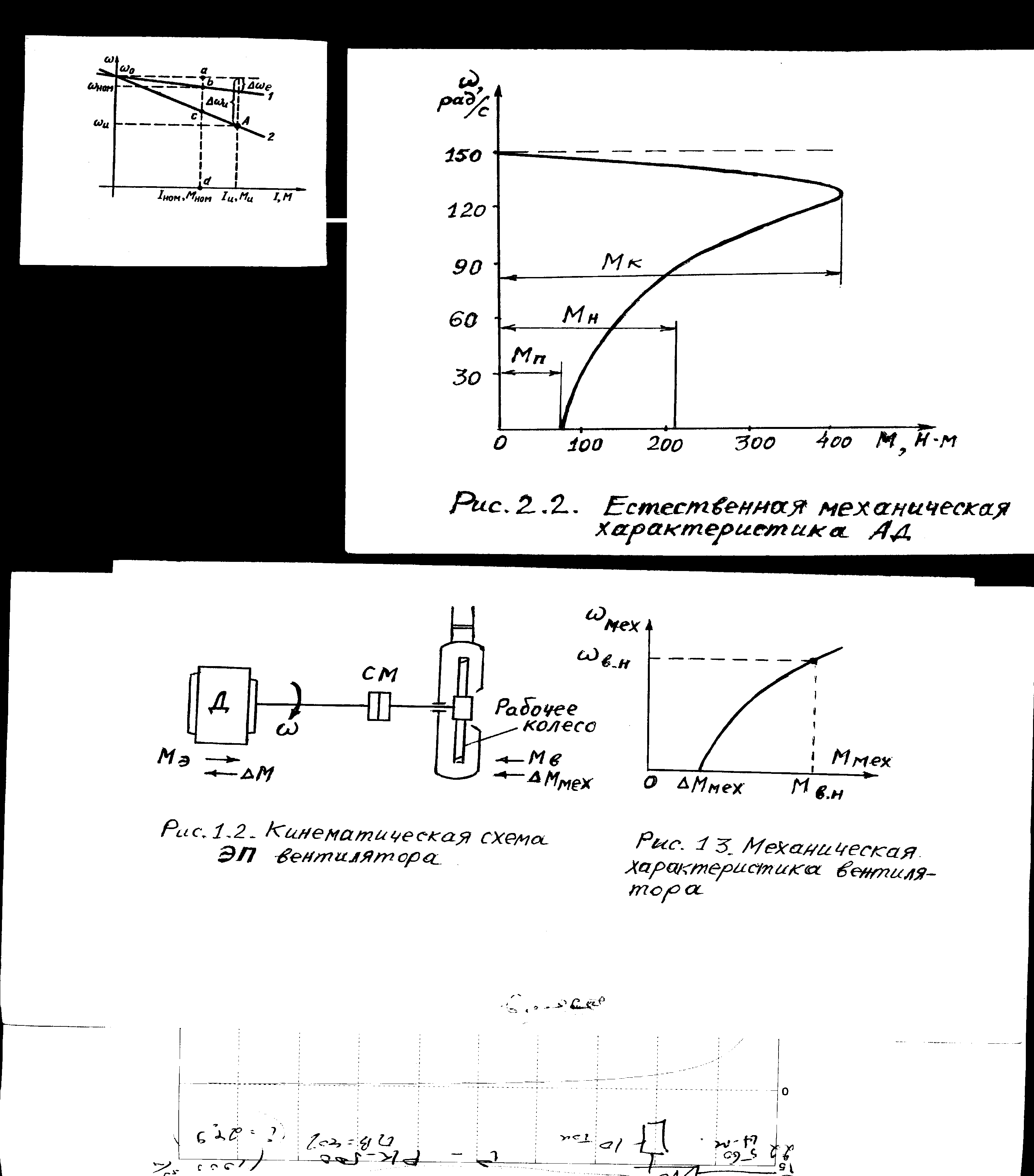
Рис. 6.4. Характеристики ДПТ НВ для розрахунку величини
регулювальних резисторів
Метод пропорцій. Запишемо відношення перепадів швидкості при струмі Iі чи моменті Мі на природній Δω е та бажаній штучній Δω та характеристиках:
Δω е / Δω і = Iі Rя / ( Iі ( Rя + Rд)) = Rя / ( Rя + Rд).
Тоді потрібна величина
Rд = Rя (Δω і / Δω е - 1).
Метод відрізківне вимагає знання значення власного опору двигуна Rя (більше того, його значення можна визначити за відомою природною характеристикою).
Запишемо вираз для швидкості двигуна на заданій штучній характеристиці (див. рис. 6.4) при номінальних струмі Iн, момент Мн, магнітному потоці Ф н та напрузі Uн:
ω і = Uн/(кФ н) (1 – Iн R/ Uн),
де Uн/(кФ н) = ω 0 .
ω і = ω 0 (1 – R / Rн).
Тут Rн = Uн/ Iн - так зване номінальне опір, що є базовою величиною при розрахунках, Ом.
Співвідношення
R / Uн = (ω 0 - ω і) / ω 0 = δ
відбиває важливу властивість ДПТ НВ: відносний перепад швидкості δ = Δω / ω 0 дорівнює відносному активному опору ланцюга якоря R / Rн.
Позначимо на рис. 6.4 характерні точки а, b,з, dі відзначимо, що 0 - ω і = Δω = ас, ω 0 = аd.Тоді R = Rн Δω / ω 0 = Rн ас/аd; Rд = Rн bз/аd; Rя = Rн аb /аd.
Таким чином, для знаходження Rд необхідно спочатку за характеристиками визначити довжини відрізків bзі аdпри номінальному струміабо моменті та розрахувати номінальний опір Rн = Uн/ Iн.
Розрахунок додаткових резисторів можна виконати також за такими формулами для заданого допустимого струму Iдод, який визначається величиною допустимого моменту Мдодатковими або умовами пуску, реверсу та гальмування.
Опір резистора Rд1 при пуску ( Е = 0)
Rд1 = ( U / Iдод) – Rя.
Опір резистора R д2 при динамічному гальмуванні
Rд2 = ( Е / Iдод) – Rя ≈ ( U / Iдод) – Rя).
Опір резистора Rд3 при реверсі або гальмуванні противмиканням
Rд3 = (( U + Е) / Iдод) – Rя ≈ (2 U / Iдод) – Rя.
приклад . ДПТ НВ типу ПБСТ-53 має такі паспортні дані: Рн = 4,8 кВт; nн = 1500 об/хв; Uн = 220 В; Iн = 24,2 А; Rя = 0,38 Ом; Iв.н = 0,8 А. Потрібно визначити:
1) опір резистора, включення якого в ланцюг якоря двигуна забезпечить проходження штучної механічної характеристики через точку з координатами і = 90 рад/с, Мн = 25 Нм;
2) опору резисторів, включення яких обмежить струм при пуску та гальмуванні противмиканням до рівня Iдоп = 3 Iн.
Якщо обмотку збудження і якір двигуна підключити до мережі постійного струму напругою U, виникає електромагнітний крутний момент М ем. Корисний момент, що обертає М на валу двигуна менше електромагнітного на значення протидіючого моменту, створюваного в машині силами тертя і рівного моменту М х в режимі х.х., тобто М = М ем -М х.
Пусковий моментдвигуна повинен бути більшим за статичний гальмівний М т у стані спокою ротора, інакше якір двигуна не почне обертатися. У режимі, що встановився (при n = соnst) має місце рівновага обертаючого М і гальмівного М моментів:
М = М ем - М х = М т (8)
З механіки відомо, що механічна потужністьдвигуна може бути виражена через крутний момент і кутову швидкість
Отже, корисний крутний момент двигуна М (Н м), виражений через корисну потужність Р (кВт) і частоту обертання n (об/хв),
М =9550P/n (10)
Обговоримо деякі важливі питання пуску та роботи двигунів постійного струму. З рівняння електричного станудвигуна слід, що
I I = (U - E) / R I (11)
У робочому режимі струм якоря I обмежується е. д. с. E, якщо n приблизно дорівнює n ном. У момент запуску п = 0, е. д. с. Е = 0 і пусковий струм I п = U/R я в 10-30 разів більший за номінальний. Тому прямий пуск двигуна, тобто безпосереднє включення якоря на напругу мережі, неприпустимо. Щоб обмежити великий пусковий струм якоря перед пуском послідовно з якорем включається пусковий реостат R п з невеликим опором. В цьому випадку при Е = О
I п = U/(R я – R п)<< U/R я (12)
Опір реостатаRп вибирається за допустимим струмом якоря.
У міру розгону двигуна до номінальної частоти обертання е. д. с. Е збільшується, а струм зменшується і пусковий реостат поступово та повністю виводиться (пускові реостати розраховуються на короткочасне включення). Регулювальний реостат R рег в ланцюзі збудження з відносно великим опором (десятки та сотні Ом) перед пуском двигуна повністю виводиться, щоб при пуску струм збудження та магнітний потік статора Ф були номінальними. Це призводить до збільшення пускового моменту, який забезпечує швидкий та легкий розгін двигуна.
Після пуску і розгону настає режим роботи двигуна, при якому гальмівний момент на валу Мт буде врівноважуватися моментом, що розвивається двигуном М ем , тобто М ем == М т (при n = соnst.)
Електродвигуни постійного струму можуть відновлювати порушений зміною гальмівного моменту режим роботи, тобто можуть розвивати крутний момент М , рівний новому значенню гальмівного моменту М т за відповідно нової частоти обертання n" .
Дійсно, якщо гальмівний момент навантаження М т виявиться більше крутного моменту двигуна М ем, то частота обертання якоря зменшиться. При постійній напрузі U та потоці Ф це викликає зменшення е. д. с. Е якоря, збільшення струму якоря і моменту, що обертає, до настання рівноваги, при якому М ем = М т і n"
Регулювання частоти
Частота обертання якоря двигуна постійного струму визначається на підставі рівняння електричного стану U = Е + R I I я після підстановки в нього е. д. с. Е = сФn:
 (13)
(13)
Падіння напруги в якорі R I I я невелике: при номінальному навантаженні воно не перевищує 0,03 - 0,07 U ном.
Таким чином, частота обертання двигуна постійного струму прямо пропорційна доданої напруги мережі і обернено пропорційна магнітному потоку статора . З рівняння (13) слід, що регулювати частоту обертання двигуна можна двома способами: змінюючи потік статора Ф або напруга U, що підводиться до двигуна. Регулювання частоти обертання зміною магнітного поля машини здійснюється за допомогою регулювального реостата ланцюга збудження двигуна. Зміна напруги, що підводиться до двигуна, проводиться регулюванням напруги джерела.
Можна ввести додатковий реостат у ланцюг якоря. У цьому випадку пусковий реостат замінюється пускорегулюючим R пр Такий реостат виконує функції як пускового реостата, так і регулювального. Рівняння (13) має при цьому вигляд
 (14)
(14)
Звідси випливає, що регулювання частоти обертання двигуна можна здійснити, змінюючи напругу мережі, опір реостату пускорегулюючого або потік статора.
Реверсування двигунів. З рівняння обертаючого моменту двигуна М ем = kФI випливає, що реверсування, т. е. зміна напрямку обертання якоря, може бути здійснено зміною напряму струму в обмотці збудження (потоку Ф) або струму якоря.
Для реверсування двигуна «на ходу» змінюють напрям струму якоря (перемиканням якірних висновків), а обмотку збудження не перемикають, оскільки вона має велику індуктивність і розрив її ланцюга зі струмом неприпустимий. Реверсування відключеного двигуна здійснюється зміною напряму струму в обмотці збудження (перемиканням її висновків).
Міністерство освіти та науки Російської Федерації
ГОУ ВПО Південно-Уральський державний університет
Філія у м. Златоусті
Двигуни постійного струму
ЗД-431.583.270102
Виконав: Шаріпова Ю.Р.
Група: ЗД-431
Перевірив: Румянцев.
1. Введення
2. Пристрій та принцип дії двигунів постійного струму
3. Пуск двигунів
4. Технічні дані двигунів
5. Ккд двигунів постійного струму
6 Характеристики двигуна постійного струму
6.1 Робочі характеристики
6.2 Механічна характеристика
7. Список використаної літератури
1. Введення
Електричні машини постійного струму широко застосовують у різних галузях промисловості.
Значне поширення електродвигунів постійного струму пояснюється їх цінними якостями: високими пусковими, гальмівними та перевантажувальними моментами, порівняно високою швидкодією, що важливо при реверсуванні та гальмуванні, можливістю широкого та плавного регулювання частоти обертання.
Електродвигуни постійного струму використовують для приводів, що регулюються, наприклад, для приводів різних верстатів і механізмів. Потужності цих електродвигунів досягають сотень кіловат. У зв'язку з автоматизацією управління виробничими процесами та механізмами розширюється сфера застосування малопотужних двигунів постійного струму загального застосування потужністю від одиниць до сотень ват.
Залежно від схеми живлення обмотки збудження машини постійного струму поділяються на кілька типів (з незалежним, паралельним, послідовним і змішаним збудженням).
Щорічний випуск машин постійного струму в РФ значно менше випуску машин змінного струму, що обумовлено дорожнечею двигунів постійного струму.
Спочатку створювалися машини постійного струму. Надалі вони значною мірою були витіснені машинами змінного струму. Завдяки можливості плавного та економічного регулювання швидкості обертання двигуни постійного струму зберігають своє домінуюче значення на транспорті, для приводу металургійних верстатів, у кранових та підйомно-транспортних механізмах. У системах автоматики машини постійного струму широко використовуються як виконавчі двигуни, двигуни для приводу стрічкопротяжних самозаписувальних механізмів, як тахогенератори та електромашинні підсилювачі.
2. Пристрій та принцип дії двигунів постійного струму
Пристрій машин постійного струму (генераторів та двигунів) у спрощеному вигляді показано на рис.1. До сталевого корпусу 1 статора машини прикріплені 2 головні і додаткові 4 полюси. На головних полюсах розташована обмотка збудження 3, на додаткових обмотка додаткових полюсів 5. Обмотка збудження створює магнітний потік Ф машини.
Рис.1
На валу двигуна 10 закріплений циліндричний магнітопровід 6, в пазах якого розташована обмотка якоря 7. Секції обмотки якоря приєднані до колектора 9. До нього ж притискаються пружинами нерухомі щітки 8. Закріплений на валу двигуна колектор складається з ряду ізольованих від нього і один пластин. За допомогою колектора і щіток здійснюється з'єднання обмотки якоря із зовнішнім електричним ланцюгом. У двигунів вони, крім того, служать для перетворення постійного за напрямом струму зовнішнього ланцюга змінний у напрямку струм у провідниках обмотки якоря.
Додаткові полюси з розташованою на них обмоткою зменшують іскріння між щітками та колектором машини. Обмотку додаткових полюсів послідовно з'єднують з обмоткою якоря і на електричних схемах часто не зображують.
Для зменшення втрат потужності магнітопровід якоря виконаний із окремих сталевих листів. Усі обмотки виготовлені із ізольованого дроту. Крім двигунів, що мають два головні полюси, існують машини постійного струму з чотирма і більшою кількістю головних полюсів. При цьому відповідно збільшується кількість додаткових полюсів та комплектів щіток.
Якщо двигун включений у мережу постійної напруги, то при взаємодії магнітного поля, створеного обмоткою збудження, і струму у провідниках якоря виникає крутний момент, що діє на якір:
![]() (1)
(1)
де К М - коефіцієнт, що залежить від конструктивних параметрів машини; Ф – магнітний потік одного полюса; Я - струм якоря.
Якщо момент двигуна при n = 0 перевищує гальмуючий момент, яким навантажений двигун, якір почне обертатися. При збільшенні частоти обертання n зростає індукована в якорі ЕРС. Це призводить до зменшення струму якоря:
![]() (3)
(3)
де r Я – опір якоря.
Наслідком зменшення струму Я є зменшення моменту двигуна. При рівності моментів двигуна та навантаження частота обертання перестає змінюватись.
Напрямок моменту двигуна і, отже, напрямок обертання якоря залежить від напрямку магнітного потоку і струму у провідниках обмотки якоря. Щоб змінити напрямок обертання двигуна, слід змінити напрям струму якоря або струму збудження.
3. Пуск двигунів
З формули (3) випливає, що першу мить після включення двигуна в мережу постійної напруги, тобто. коли і ,
Так як опір r Я невеликий, то струм якоря може в 10 ... 30 разів перевищувати номінальний струм двигуна, що неприпустимо, оскільки призведе до сильного іскріння та руйнування колектора. Крім того, при такому струмі виникає неприпустимо великий момент двигуна, а при часті пуски можливий перегрів обмотки якоря.
Щоб зменшити пусковий струм у ланцюгу якоря, включають пусковий резистор, опір якого зі збільшенням частоти обертання двигуна зменшують до нуля. Якщо пуск двигуна автоматизований, то пусковий резистор виконують з кількох ступенів, які послідовно вимикають у міру збільшення частоти обертання.
Пусковий струм якоря
![]()
У міру розгону двигуна в обмотці якоря зростає ЕРС, а як випливає з формули (3), це призводить до зменшення струму якоря I Я. Тому в міру збільшення частоти обертання двигуна опір ланцюга якоря зменшують. Щоб при порівняно невеликому пусковому струмі отримати великий пусковий момент, запуск двигуна здійснюють з найбільшим магнітним потоком. Отже, струм збудження при пуску може бути максимально допустимим, тобто. номінальним.
4.Технічні дані двигунів
У паспорті двигуна та довідковій літературі на двигуни постійного струму вказані такі технічні дані: номінальна напруга U та потужність P н, частота обертання n н, струм I н, ККД.
Під номінальним U н розуміють напругу, на яку розраховані обмотка якоря та колектор, а також у більшості випадків і паралельна обмотка збудження. З урахуванням номінальної напруги вибирають електроізоляційні матеріали двигуна.
Номінальний струм I н - максимально допустимий струм (споживаний з мережі), при якому двигун нагрівається до найбільшої допустимої температури, працюючи в тому режимі (тривалому, повторно-короткочасному, короткочасному), на який розрахований:
![]()
де I ян - Струм якоря при номінальному навантаженні; I вн - Струм обмотки збудження при номінальній напрузі.
Слід зазначити, що струм збудження I вн двигуна паралельного збудження порівняно малий, тому при номінальному навантаженні зазвичай приймають
Номінальна потужність Р н - це потужність, що розвивається двигуном на валу при роботі з номінальним навантаженням (моментом) та при номінальній частоті обертання n н.
Частота обертання n н і ККД відповідають роботі двигуна зі струмом I н, напругою U н без додаткових резисторів у ланцюгах двигуна.
У загальному випадку потужність на валу P 2 момент М і частота обертання n пов'язані співвідношенням:
Споживана двигуном з мережі потужність Р 1 величини P 2 ККД U і I пов'язані співвідношеннями:
Вочевидь, що це співвідношення справедливі й у номінального режиму роботи двигуна.
5. ККД двигунів постійного струму
Коефіцієнт корисної дії є важливим показником двигунів постійного струму. Чим він більший, тим менша потужність Р і струм I, що споживаються двигуном з мережі при одній і тій же механічній потужності. У загальному вигляді залежність така:
![]() (9)
(9)
де - Втрати в обмотці якоря; - Втрати в обмотці збудження; - Втрати в магнітопроводі якоря; - Механічні втрати.
Втрати потужності не залежать і мало залежать від навантаження двигуна.
Двигуни розраховуються таким чином, щоб максимальне значення ККД було в області, що близька до номінальної потужності. Експлуатація двигунів при малих навантаженнях небажана внаслідок малих значень r я. Значення ККД двигунів з різними способами збудження та потужністю від 1 до 100 кВт при номінальному навантаженні різні та становлять у середньому 0,8.
6. Характеристики двигунів постійного струму
6.1. Робочі характеристики
Робочими називаються регулювальна, швидкісна, моментна та к.п.д. Характеристики.
Регулювальна характеристика
Регулювальна характеристика представляє залежність швидкості обертання П від струму Iв збудження у разі, якщо струм Iа якоря і напруга мережі U залишаються незмінними, тобто n=f(Iв) при Ia=const і U=const.
Доки сталь магнітоприводу машини не насичена, потік Ф змінюється пропорційно струму збудження Iв. В цьому випадку регулювальна характеристика є гіперболічною. У міру насичення при високих струмах Iв характеристика наближається до лінійної (рис. 2). При малих значеннях струму I швидкість обертання різко зростає. Тому при обриві ланцюга збудження двигуна (Iв = 0) з паралельним збудженням швидкість його обертання досягає неприпустимих меж, як кажуть: "Двигун йде врознос". Виняток можуть становити мікродвигуни, які мають відносно великий момент холостого ходу М0.

Рис. 2. Регулювальна характеристика двигуна
У двигунах послідовного збудження Iв = Iа. При малих навантаженнях струм якоря Iа малий і швидкість обертання може бути занадто великий, тому пуск та робота при малих навантаженнях неприпустимі. Мікродвигуни так само, як і. у попередньому випадку можуть становити виняток.
Швидкісні характеристики.
Швидкісні характеристики дають залежність швидкості обертання п від корисної потужності Р2 на валу двигуна у разі, якщо напруга U мережі та опір rв регулювального реостата ланцюга збудження залишаються незмінними, тобто n=f(P2), при U=const і rв = const .
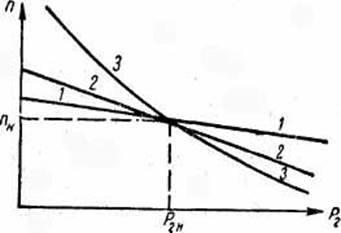
Рис. 3. Швидкісні характеристики
Зі зростанням струму якоря при збільшенні механічного навантаження двигуна паралельного збудження одночасно збільшується падіння напруги в якорі і з'являється реакція якоря, яка зазвичай розмагнічує діє. Перша причина прагне зменшити швидкість обертання двигуна, друга – збільшити. Дія падіння напруги в якорі зазвичай надає більшого впливу. Тому швидкісна характеристика двигуна паралельного збудження має трохи падаючий характер (крива 1, рис. 3).
У двигуні послідовного збудження струм якоря є струмом збудження. В результаті швидкісна характеристика двигуна з послідовним збудженням має характер, близький до гіперболічного. При збільшенні навантаження в міру насичення магнітного ланцюга характеристика набуває більш прямолінійного характеру (крива 3 на рис. 3).
У компаундному двигуні при включенні обмоток швидкісна характеристика займає проміжне положення між характеристиками двигуна паралельного і послідовного збудження (крива 2).
Моментні властивості.
Моментні характеристики показують, як змінюється момент М при зміні корисної потужності Р2 на валу двигуна, якщо напруга U мережі та опір rв регулювального реостата в ланцюзі збудження залишаються незмінними, тобто М = f(P2), при U=const, rв= const.
Корисний момент на валу двигуна
Якщо швидкість обертання двигуна паралельного збудження не змінювалася б із навантаженням, то залежність моменту Ммех від корисної потужності графічно представляла б пряму лінію, яка проходить через початок координат. Насправді швидкість обертання із збільшенням навантаження падає. Тому характеристика корисного моменту дещо загинається догори (крива 2, рис. 4). При цьому крива електромагнітного моменту М проходить вище за криву корисного моменту Ммех на постійну величину, рівну моменту холостого ходу М0 (крива 1).
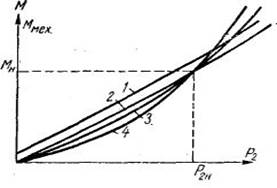
Рис. 4. Моментні характеристики
У двигуні послідовного збудження вигляд моментної характеристики наближається до параболічного, оскільки зміна моменту від струму навантаження відбувається, за законом параболи, доки сталь не насичена. У міру насичення залежність набуває більш прямолінійного характеру (крива 4). У компаундному двигуні моментна характеристика (крива 3) займає проміжне положення між характеристиками двигуна паралельного та послідовного збудження.
Характеристика зміни коефіцієнта корисної дії.
Крива залежності к. п. д. від навантаження має характерний всім двигунів вид (рис 5). Крива проходить через початок координат і швидко зростає зі збільшенням корисної потужності до 1/4 номінальної. При потужності Р2, що дорівнює приблизно 2/3 номінальної, к. п. д. зазвичай досягає максимального значення. При збільшенні навантаження до номінальної к. п. д. залишається незмінним або трохи падає.
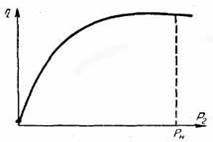
Рис. 5. Зміна к. п. д. двигуна
6.2 Механічна характеристика
Найважливішою характеристикою двигуна є механічна n(M). Вона показує, як залежить частота обертання двигуна від моменту, що розвивається. Якщо до обмоток двигуна підведено номінальну напругу і відсутні додаткові резистори в його ланцюгах, то двигун має механічну характеристику, яка називається природною. На природній характеристиці знаходиться точка, що відповідає номінальним даним двигуна (М н, Р я і т.д.). Якщо ж напруга на обмотці якоря менша від номінального, або I в< I вн, то двигатель будет иметь различные искусственные механические характеристики. На этих характеристиках двигатель работает при пуске, торможении, реверсе и регулировании частоты вращения.
Перетворивши вираз (3) щодо частоти обертання, отримаємо рівняння електромеханічної характеристики n(I я):
![]() (7)
(7)
Після заміни в рівнянні (7) струму I згідно формули (1), отримаємо рівняння механічної характеристики n(М):
![]() (8)
(8)
При Ф = соnst, електромеханічна n(I я) і механічна n(М) характеристики двигуна паралельного збудження є прямими лініями. Так як за рахунок реакції якоря магнітний потік трохи змінюється, то характеристики насправді дещо відрізняються від прямих.
Працюючи вхолостую (М = 0) двигун має частоту обертання холостого ходу, що визначається першим членом рівняння (8). Зі збільшенням навантаження n зменшується. Як випливає з рівняння (8), це пояснюється наявністю опору якоря r я.
Оскільки r я не велике, частота обертання двигуна зі збільшенням моменту змінюється мало, і двигун має жорстку природну механічну характеристику (рис.6, характеристика 1).
З рівняння (8) слід, що регулювати частоту обертання при заданому постійному навантаженні (М = const) можна трьома способами:
а) зміною опору ланцюга якоря;
б) зміною магнітного потоку двигуна;
в) зміною напруги на затисканнях якоря.

Рис. 6 Механічні характеристики
Для регулювання частоти обертання першим способом ланцюг якоря. має бути включений додатковий опір r д. Тоді опір у рівнянні (8) необхідно замінити на r я + r д.
Як випливає з рівняння (8), частота обертання n пов'язана з опором ланцюга якоря r я + r при постійному навантаженні (М = const) лінійною залежністю, тобто. зі збільшенням опору частота обертання зменшується. Різним опорам rд відповідають різні штучні механічні характеристики, одна з яких наведена на рис.2 (характеристика 2). За допомогою характеристики 2 за заданого моменту М1 можна отримати частоту обертання n2.
Зміна частоти обертання другим способом здійснюється за допомогою джерела напруги UD2, що регулюється. Змінюючи його напругу регулятором R2, можна змінити струм збудження I тим самим магнітний потік двигуна. Як очевидно з рівняння (8), при постійному навантаженні (М = соnst) частота обертання перебуває у складній залежності від магнітного потоку Ф. Аналіз рівняння (8) показує, що у деякому діапазоні зміни магнітного потоку Ф зменшення останнього призводить до збільшення частоти обертання. Саме цей діапазон змін потоку використовують при регулюванні частоти обертання.
p align="justify"> Кожному значенню магнітного потоку відповідає штучна механічна характеристика двигуна, одна з яких наведена на рис.2 (характеристика 4). За допомогою характеристики 4 при моменті М1 можна отримати частоту обертання n4.
Щоб регулювати частоту обертання зміною напруги на затисканнях якоря, необхідно мати відносно потужне джерело напруги, що регулюється. Кожному значенню напруги відповідає штучна механічна характеристика двигуна, одна з яких наведена на рис.2(Характеристика 3). За допомогою характеристики 3 за заданого моменту М1 можна отримати частоту обертання n3.
Список використаної літератури
1. Кацман М.М. Електричні машини. -М.: Вищ. шк., 1993.
2. Копилов І.П. Електричні машини. -М.: Вища школа, 1986
Електродвигуни постійного струму можуть мати незалежне, паралельне, послідовне чи змішане збудження (рис. 6.1).
Рис. 6.1. Схеми електродвигунів постійного незалежного струму ( а),
паралельного ( б), послідовного ( в) та змішаного ( г) порушення
(верхня частина схеми "в" належить схемі "а")
В електродвигуні паралельного збудження обмотка збудження приєднується паралельно до затискачів якоря. Але струм, що протікає по цій обмотці, на відміну від струму якоря не залежить від навантаження і визначається прикладеним до якоря напругою та загальним опором ланцюга збудження. З цієї причини електродвигун паралельного збудження називають також електродвигуном із незалежним збудженням.
Обертальний момент Мдвигуна постійного струму та його ЕРС Евизначаються за формулами
М= до Ф Iя; Е= кФω,
де до – конструктивний коефіцієнт двигуна;
Ф - магнітний потік, Вб;
Iя - струм якоря, А.
ω – кутова швидкість, рад/с.
Рівняння електромеханічної ω = ƒ ( Iя) і механічної ω = ƒ ( М) характеристик мають вигляд
ω = U/ (КФ) - ( Rя + Rр) / (до Ф) Iя;
ω = U/ (КФ) - ( Rя + Rр) / (до 2 Ф 2) М.
Кутова швидкість ідеального холостого ходу (при Iя = 0 або М = 0)
ω 0 = U/ (КФ).
На рис. 6.2 представлені механічні характеристики двигуна постійного струму із незалежним збудженням (ДПТ НВ) у всіх режимах роботи. Характерними точками характеристик у руховому режимі є: точка ідеального холостого ходу (ω 0 , М= 0); точка номінального режиму (? н, Мн); точка короткого замикання (ω = 0, М = Мк).
Жорсткість механічної характеристики визначається потоком збудження та опором якірного ланцюга:
β = d M/ dω = - до 2 Ф 2 / ( Rя + Rр) = - Мдо/ω.
Рис. 6.2. Поєднані механічні характеристики двигуна постійного струму з незалежним збудженням
Найбільше значення модуля жорсткості відповідає природній механічній характеристиці, оскільки струм збудження дорівнює номінальному та регулювальний опір Rр = 0. У міру збільшення опору реостату Rр нахил механічної характеристики зростає, а кутова швидкість знижується. При заданому значенні опору Rв номінальному моменті Мн кутова швидкість двигуна
ω н.р = ω 0 (1 – Iн ( Rя + Rр) / Uн.
Для розрахунку механічних характеристик необхідно знати опір якоря двигуна Rя, яке задається у каталогах. За відсутності заводських даних величину Rя знаходять орієнтовно за формулою
Rя = 0,5 (1 – ŋ н) ( Uн/ Iн).
Так як механічні характеристики ДПТ НВ прямолінійні, для їх побудови достатньо мати дві точки:
1) ω = ω 0 та М = 0,
2) ω = ω н (або ω = ω н.р) та М = Мн.
Для ДПТ НВ можливі наступні три режими електричного гальмування.
1. Рекуперативне гальмування, що відбувається, коли швидкість двигуна вище швидкості ідеального холостого ходу. Воно є найбільш економічним, оскільки енергія гальмування передається електричну мережу. Механічні характеристики у цьому режимі є продовженням відповідних характеристик рухового режиму у II квадранті. Схема двигуна при рекуперативному гальмуванні не змінюється.
2. Динамічне гальмування. Якір двигуна відключається від мережі та замикається на опір. При цьому механічна енергія рухомих частин (механізму та якоря двигуна) перетворюється на електричну, яка втрачається у вигляді теплової енергії в опорах якірного ланцюга. Механічні характеристики в даному режимі гальмування проходять через початок координат (рис. 6.2 – лінії з трьома засічками).
3. Гальмування противключеннямздійснюється двома способами:
1) введенням великого опору в ланцюг якоря.При цьому крутний момент двигуна стає меншим, ніж статичний момент навантаження. Мс. Двигун зупиняється (у точці А), а потім під дією моменту Мз починає обертатися в іншому напрямку, розвиваючи гальмівний момент; у точці Б настає встановлений режим. Механічні характеристики є продовженням відповідних характеристик рухового режиму (на рис. 6.2 – лінії із чотирма засічками);
2) гальмування перемиканням полярності обмотки якоря по ходу. Двигун, що працює у точці 1 після перемикання перейде на реостатну характеристику в точку 2. По лінії 2–3 відбувається гальмування (лінія із п'ятьма засічками). У точці 3 двигун зупиняється і його слід відключити від мережі, щоб уникнути переходу в руховий режим із обертанням у зворотному напрямку.
У двигуні постійного струму з послідовним збудженнямде-нямСтрум якоря одночасно є і струмом збудження. Магнітний потік збудження зростає зі збільшенням навантаження, внаслідок чого кутова швидкість знижується відповідно до рівняння (6.1) та механічна характеристика двигуна буде м'якою (рис. 6.3). Завдяки цьому ДПТ НВ порівняно легко та плавно долає перевантаження та має високий пусковий момент. Дані властивості двигуна дозволяють широко застосовувати його у приводі транспортних механізмів. Механічні характеристики двигуна значно пом'якшуються при введенні в ланцюг якоря реостату (рис. 6.3 лінії з однією засічкою).
Рис. 6.3. Механічні характеристики двигуна постійного струму
з послідовним збудженням
У ДПТ ПВ не можна здійснити режим гальмування рекуперативного, оскільки в ньому відсутня швидкість ідеального холостого ходу.
Динамічне гальмування може здійснюватися за схемою із самозбудженням та з незалежним збудженням. У першому випадку якір та обмотка збудження відключаються від мережі та замикаються на реостат. Щоб уникнути розмагнічування машини, необхідно переключити обмотку збудження (або якір) таким чином, щоб напрям струму в обмотці збудження не змінилося. У цьому випадку машина самозбуджується при цьому опорі ланцюга якоря лише за певного значення кутової швидкості; збудившись, вона створює гальмівний момент. Механічні характеристики нелінійні (на рис. 6.3 – криві із чотирма засічками).
Механічні характеристики двигуна в режимі динамічного гальмування із незалежним збудженням аналогічні відповідним характеристикам двигуна із незалежним збудженням (на рис. 6.3 – лінії з двома засічками). Такий спосіб гальмування знайшов широке застосування, а перший спосіб використовують рідко, в основному як аварійний, наприклад, при зникненні напруги мережі.
Гальмування противключенням здійснюється, як у ДПТ НВ, двома способами:
1) включенням у ланцюг якоря великого опору;
2) зміною полярності обмотки якоря, залишивши напрямок струму в обмотці збудження без зміни.
При першому способі механічна характеристика буде продовженням характеристики, що відповідає руховому режиму (рис. 6.3 – лінія з трьома засічками). При другому способі гальмування здійснюється по лінії 1 –2–3 .
Регулює швидкість електроприводів постійного струму.Швидкість ДПТ НВ можна регулювати:
1) шляхом зміни опору в ланцюзі якоря;
2) зміною потоку збудження;
3) зміною напруги, що підводиться до якоря.
Регулювання за першим способоммає суттєві недоліки:
- зменшується жорсткість механічних характеристик при зниженні кутової швидкості, а втрати потужності в головному ланцюзі зростають;
- Діапазон регулювання обмежений, особливо при малих навантаженнях;
- Невеликі плавність і точність регулювання.
З цих причин такий спосіб регулювання приводу постійного струму використовується рідко.
за другому способуможна регулювати магнітний потік тільки у бік зменшення (оскільки в номінальному режимі магнітна ланцюг двигуна насичена), що відповідає збільшенню швидкості вище номінальної. Можливий діапазон регулювання швидкості при цьому не перевищує 2 двигуна нормального виконання. Верхня межа швидкості обмежується механічною міцністю елементів якоря двигуна – бандажів обмотки якоря, колектора.
Основним способом регулювання швидкості ДПТ НВ є спосіб, заснований на зміні напруги, що підводиться до якоря, яке здійснюється за допомогою спеціального регульованого перетворювача. Як індивідуальні джерела живлення використовують в основному тиристорні перетворювачі. Жорсткість механічних характеристик приводу системою «перетворювач – ДПТ НВ» практично постійна. Механічні характеристики є сімейством паралельних один одному прямих. Діапазон, плавність, точність регулювання тут вища, ніж за інших способів регулювання. Тому дана система приводу застосовується для механізмів, що потребують глибокого та плавного регулювання швидкості.
Розрахунок додаткових резисторів у ланцюзі якоря ДПТ НВ.Якщо відома природна електромеханічна або механічна характеристика 1 двигуна (рис. 6.4) та його паспортні дані, то розрахунок опору Rд, при включенні якого в ланцюг якоря бажана штучна характеристика 2 пройде через точку А із заданими координатами ω і, Iі або і, М і, можна виконати наступними найбільш поширеними методами.
Рис. 6.4. Характеристики ДПТ НВ для розрахунку величини
регулювальних резисторів
Метод пропорцій. Запишемо відношення перепадів швидкості при струмі Iі чи моменті Мі на природній Δω е та бажаній штучній Δω та характеристиках:
Δω е / Δω і = Iі Rя / ( Iі ( Rя + Rд)) = Rя / ( Rя + Rд).
Тоді потрібна величина
Rд = Rя (Δω і / Δω е - 1).
Метод відрізківне вимагає знання значення власного опору двигуна Rя (більше того, його значення можна визначити за відомою природною характеристикою).
Запишемо вираз для швидкості двигуна на заданій штучній характеристиці (див. рис. 6.4) при номінальних струмі Iн, момент Мн, магнітному потоці Ф н та напрузі Uн:
ω і = Uн/(кФ н) (1 – Iн R/ Uн),
де Uн/(кФ н) = ω 0 .
ω і = ω 0 (1 – R / Rн).
Тут Rн = Uн/ Iн - так зване номінальне опір, що є базовою величиною при розрахунках, Ом.
Співвідношення
R / Uн = (ω 0 - ω і) / ω 0 = δ
відбиває важливу властивість ДПТ НВ: відносний перепад швидкості δ = Δω / ω 0 дорівнює відносному активному опору ланцюга якоря R / Rн.
Позначимо на рис. 6.4 характерні точки а, b,з, dі відзначимо, що 0 - ω і = Δω = ас, ω 0 = аd.Тоді R = Rн Δω / ω 0 = Rн ас/аd; Rд = Rн bз/аd; Rя = Rн аb /аd.
Таким чином, для знаходження Rд необхідно спочатку за характеристиками визначити довжини відрізків bзі аdпри номінальному струмі або моменті та розрахувати номінальний опір Rн = Uн/ Iн.
Розрахунок додаткових резисторів можна виконати також за такими формулами для заданого допустимого струму Iдод, який визначається величиною допустимого моменту Мдодатковими або умовами пуску, реверсу та гальмування.
Опір резистора Rд1 при пуску ( Е = 0)
Rд1 = ( U / Iдод) – Rя.
Опір резистора R д2 при динамічному гальмуванні
Rд2 = ( Е / Iдод) – Rя ≈ ( U / Iдод) – Rя).
Опір резистора Rд3 при реверсі або гальмуванні противмиканням
Rд3 = (( U + Е) / Iдод) – Rя ≈ (2 U / Iдод) – Rя.
приклад . ДПТ НВ типу ПБСТ-53 має такі паспортні дані: Рн = 4,8 кВт; nн = 1500 об/хв; Uн = 220 В; Iн = 24,2 А; Rя = 0,38 Ом; Iв.н = 0,8 А. Потрібно визначити:
1) опір резистора, включення якого в ланцюг якоря двигуна забезпечить проходження штучної механічної характеристики через точку з координатами і = 90 рад/с, Мн = 25 Нм;
2) опору резисторів, включення яких обмежить струм при пуску та гальмуванні противмиканням до рівня Iдоп = 3 Iн.