На сьогоднішній день асинхронні електродвигуни є найпоширенішими споживачами електроенергії у світі та використовуються повсюдно, починаючи від побутових пристроїв, таких як пилосос, холодильник чи вентилятор та закінчуючи великими промисловими установками, в яких потужність електродвигунів вимірюється в мегаватах. Це насосні станції, конвеєри, гірничодобувні установки, системи вентиляції або димовидалення і т.д. Згідно зі статистикою у світі використовується близько 300 мільйонів трифазних асинхронних електродвигунів з напругою 380В.
Щорічно близько 10% з цих електродвигунів виходять з ладу через неправильну експлуатацію, перевантаження або аварійні режими роботи. Часто вихід з ладу пов'язаний із процесом пуску асинхронного електродвигунаколи він повинен набрати номінальну швидкість обертання в механізмах з великим моментом інерції. Відповідно момент пуску для асинхронного електродвигуна є важким режимомроботи з великою механічною та електричним навантаженням. Пускові струми асинхронного електродвигуна можуть перевищувати номінальні у 10 – 12 разів.
Види пуску електродвигунів та їх особливості
Прямий запуск асинхронного електродвигуна- Це найбільш традиційний спосіб пуску, який використовується з моменту появи електродвигунів і до теперішнього часу. Це найбільш технічно просто реалізоване та економічно вигідне рішення, що дозволяє запустити електродвигун при номінальній напрузі. При такому способі пуску використовується мінімальний набір комутаційного обладнання, проте в даний час він в основному застосовується для пуску електродвигунів невеликих потужностей через певну кількість недоліків, який можна розділити на 2 категорії: електричні і механічні.
Електричні проблеми:
При прямому пуску асинхронного електродвигуна відбувається досить великий кидок струму, який призводить до падіння напруги в мережі живлення. А також може призвести до спрацьовування захисту, особливо у випадках, коли не застосовують спеціальні апарати для захисту електродвигуна. Крім того, у разі затяжного пуску тривале протікання струму, що перевищує номінальний в 6 -8 разів, надає значний тепловий і електродинамічний вплив як на кабель підключений до електродвигуна, так і на обмотки асинхронного електродвигуна, що призводить до їх підвищеного зносу.
Механічні проблеми:
Високий початковий пусковий момент може призвести до значного поштовху і, отже, суттєвого навантаження на механізми електроприводу, такі як ремені або кріплення вузла підшипника. Це спричиняє їх скорочення терміну служби або повний вихід із ладу. У разі особливо відповідальних виробництв простої обладнання протягом часу, поки буде проводитися ремонт, можуть призвести до значних збитків. При зупинці, як і запуску, виникають сильні механічні вібрації, викликані перехідними процесами. Вони не дозволяють здійснити синхронну роботукількох незалежних вузлів у складних верстатах лініях чи установках.
Пуск за схемою зірка-трикутниктакож є одним з відомих способів пуску асинхронних електродвигунів. Цей метод використовується для зниження механічних навантажень та обмеження пускового струму. Але й він має кілька недоліків. По-перше, електродвигун обов'язково повинен мати 6 клем для підключення живлення. По-друге, для пуску за цією схемою необхідні 3 контактори, що знову ж таки збільшує вартість і габарити установки. При перемиканні зі схеми зірка на схему трикутник все одно відбувається, хай і короткочасний, але великий по амплітуді кидок струму. По-третє, потрібно використання двох кабелів від пункту керування до електродвигуна, що у разі довгих ліній досить дорого. І останній недолік полягає в тому, що зупинка електродвигуна при подібній схемі підключення такий самий як і при прямому пуску.
Третій спосіб пуску – використання пристроїв плавного пуску.
Пристрій плавного пуску – це механічний, електронний або електромеханічний пристрій, що використовується для плавного пуску або зупинки електродвигунів. Завдяки застосуванню пристрою плавного пуску можна одночасно забезпечити плавний розгін та зупинення асинхронного електродвигуна, домогтися покращення стабільності. електричних мереж, тобто зменшити кидки струму при пуску і значно зменшити просідання напруги в мережі при важкому пуску. Крім того, використання систем плавного пуску мінімізують механічні навантаження обладнання при пуску та зупинці, зменшує знос механізмів і тим самим збільшує термін служби асинхронних електродвигунів, редукторів, муфт та інших деталей приводу. Тому найоптимальнішим рішенням по співвідношенню функціонал - ціна для запуску асинхронних електродвигунів, якщо немає необхідності постійного регулювання швидкості, є пристрої плавного запуску.
Вибір перетворювача частоти
При визначенні характеристик перетворювача частоти для заданого навантаження першим кроком розгляд навантажувальних характеристик. Існують чотири різні способи розрахунку необхідних вихідних параметрів, при цьому вибір способу залежить від характеристик електродвигуна.
Навантажувальні характеристики
Перш ніж визначити типорозмір перетворювача частоти, необхідно провести різницю між двома найбільш широко використовуваними навантажувальними характеристиками. Навантажувальні характеристики різняться між собою таким чином:
Рис. 1. Постійний та квадратичний навантажувальний момент
Коли швидкість відцентрових насосів та вентиляторів збільшується, споживана потужність зростає у третій мірі (Р = n 3).
Звичайний робочий діапазон відцентрових насосів та вентиляторів лежить у межах швидкостей від 50 до 90%. Коефіцієнт навантаження зростає пропорційно квадрату швидкості, тобто приблизно від 30 до 80%.
Обидва ці фактори виявляються в характеристиках моменту, що крутить, електродвигуна, керованого перетворювачем частоти.
На рис 2 і 3 показані характеристики моменту, що крутить, для двох типорозмірів перетворювачів частоти, один з них (рис. 3) має менший діапазон потужності, ніж інший. Для обох характеристик моменту, що крутить, були задані однакові навантажувальні характеристики відцентрового насоса.
На рис. 2 весь робочий діапазон насоса (0-100%) знаходиться в межах номінальних значень параметрів двигуна. Оскільки звичайний робочий діапазон насоса в межах 30-80 %, можна вибрати перетворювач частоти з меншою вихідною потужністю.

Рис. 2. Перетворювач частоти великої потужності
Рис. 3. Перетворювач частоти малої потужності
Якщо навантажувальний момент постійний, електродвигун повинен бути здатний розвивати момент, що крутить, перевищує навантажувальний момент, оскільки надмірний крутний момент використовується для розгону.
Для розгону та забезпечення високого початкового моменту, наприклад, у разі приводу стрічкових транспортерів, достатній короткочасний перевантажувальний момент, що становить 60 % від моменту, що розвивається перетворювачем частоти. Перевантажувальний момент, що крутить, також забезпечує системі здатність долати раптові збільшення навантаження. Перетворювач частоти, який не допускає жодного перевантажувального моменту, повинен вибиратися таким чином, щоб прискорюючий момент, що крутить (T B), знаходився в межах номінального крутного моменту.
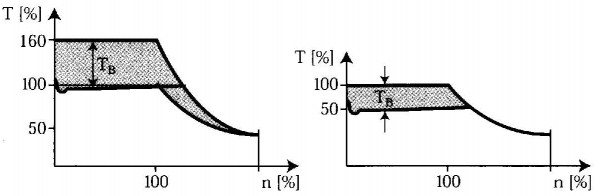
Рис. 4. Перевантажувальний момент, що крутить, використовується для розгону
При визначенні навантажувальних характеристик розглядаються чотири різні набори технічних характеристикелектродвигуна, що дозволяють ухвалити рішення щодо вибору типорозміру перетворювача частоти за потужністю.
1. Перетворювач частоти можна вибрати швидко і точно на основі значення струму l M, який споживає електродвигун. Якщо електродвигун завантажується не повністю, то струм може бути виміряний при роботі аналогічної системи з повним навантаженням.

Рис. 5.
Електродвигун 7,5 kW, 3 х 400 споживає струм 14,73 А.
Що стосується технічних даних перетворювача частоти, то вибирається такий перетворювач, у якого тривалий максимальний вихідний струм більше або дорівнює 14,73 А при постійній або квадратичній характеристиці моменту, що крутить.
Примітка:
Якщо перетворювач частоти вибирається на основі потужності (способи 2-4), необхідно порівняти розрахункову потужність і потужність, зазначену в технічних даних перетворювача частоти, при тому самому напрузі. Якщо перетворювач частоти розраховується на основі струму (спосіб 1), це не потрібно, оскільки вихідний струм перетворювача частоти впливає на інші дані.
2. Перетворювач частоти можна вибирати на основі повної потужності S M споживаної електродвигуном і повної потужності, що подається перетворювачем частоти.
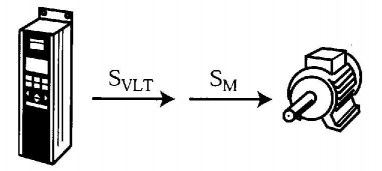
Рис. 6.
Приклад розрахунку та вибору перетворювача частоти:
Електродвигун 7,5 kW, 3x400 В споживає струм 14,73 А. Sm = U х I х √3 / 1000 = 400 х 14.73 √3 / 1000 = 10,2 кВА
Що стосується технічних даних перетворювача частоти, то вибирається такий перетворювач частоти, у якого тривала максимальна вихідна потужність більша або дорівнює 10,2 кВА при постійній або квадратичній характеристиці моменту, що крутить.
3. Перетворювач частоти можна також вибирати за потужністю Р м, що виробляється електродвигуном. Однак даний спосіб є неточним, оскільки cos і коефіцієнт корисної діїη змінюються із навантаженням.

Рис. 7.
Приклад розрахунку потужності електродвигуна
Електродвигун потужністю 3 кВт, що має cos φ = 0,80 і η = 0,81, споживає потужність S M = P M / (η х cos φ) = 3,0 / (0,80 х 0,81) = 4,6 кВА
Що стосується технічних даних перетворювача частоти, то вибирається такий перетворювач, у якого тривала максимальна вихідна потужність більша або дорівнює 4,6 кВА при постійній або квадратичній характеристиці моменту, що крутить.
4. На практиці номінальна потужністьБільшість перетворювачів частоти відповідає стандартній серії асинхронних електродвигунів. Тому перетворювачі частоти часто вибирають виходячи саме з цього міркування, що може призвести до неточного визначення їх характеристик, особливо якщо електродвигун не навантажується повністю.

Рис. 8.
Розподіл струму в перетворювачі частоти (cos φ (фі) електродвигуна)
Струм для намагнічування електродвигуна подається конденсатором, що знаходиться в проміжному ланцюзі перетворювача частоти. Струм намагнічування є реактивним струмом, який протікає між конденсатором і електродвигуном (рис. 9).

Рис. 9. Струми в перетворювачі частоти
З мережі надходить лише активний струм (l W). Саме тому вихідний струм перетворювача частоти завжди більший за вхідний струм. Крім активного струму з мережі споживається струм I loss (струм втрат).
Приклад розрахунку
За відсутності навантаження струм 4-полюсного електродвигуна потужністю 1,1 кВт дорівнює 1,6 А. Вихідний струм підключеного перетворювача частоти становить близько 1,6 А, а вхідний струм при роботі без навантаження майже дорівнює нулю.
Виробники електродвигунів зазвичай вказують cos електродвигуна при номінальному струмі. При меншому значенні cos φ (наприклад, у разі реактивного синхронного електродвигуна) номінальний струм електродвигуна при однакових значенняхпотужності та напруги буде більше, як видно з наступного рівняння:
I S = I W / cos φ
Якщо перетворювач частоти вибирається по номінальному струму електродвигуна (спосіб 1), зниження номінального крутного моменту електродвигуна не відбувається.
Конденсатор, підключений до клем електродвигуна для компенсації реактивного струмунеобхідно видалити. Через високу частоту комутації перетворювача частоти конденсатор поводиться як короткозамкнутий ланцюг і викликає суттєве збільшення струму електродвигуна. Перетворювач сприйме це як замикання на землю або коротке замикання та відключиться.
Управління швидкістю електродвигуна
Вихідна частота перетворювача частоти і, отже, швидкість електродвигуна управляються одним або декількома сигналами (0-10, 4-20 мА або імпульсами напруги). Коли подається сигнал збільшення швидкості, швидкість електродвигуна зростає, і вертикальна частина характеристик крутного моменту електродвигуна зсувається вправо (рис. 10).

Рис. 10. Залежність між керуючим сигналом та характеристиками крутного моменту електродвигуна
Якщо момент навантаження менше, ніж номінальний крутний момент електродвигуна, швидкість досягне необхідного значення. Як показано на рис. 11 навантажувальні характеристики перетинаються з характеристиками крутного моменту електродвигуна у вертикальній частині (у точці А). Якщо перетин відбувається в горизонтальній частині (точка В), швидкість електродвигуна не може тривалий час перевищувати відповідне значення, Перетворювач частоти допускає перевищення граничного струму короткого замиканнябез відключення (точка С), але тривалість перевищення обов'язково має бути обмежена за часом.

Рис. 11. Струм електродвигуна може протягом короткого часу перевищувати межу струму
Рампи розгону та гальмування
Характеристика (рампа) розгону показує темп, з яким відбувається збільшення швидкості обертання, і задається як час розгону t acc . Ці рампи базуються, головним чином, на номінальній частоті електродвигуна, наприклад, рампа розгону 5 означає, що перетворювачу частоти знадобиться 5 секунд для переходу від нульової до номінальної частоти електродвигуна (f = 50 Гц).

Рис. 12. Час розгону та гальмування
Рампа гальмування показує, як швидко знижується швидкість. Вона задається у вигляді часу гальмування t dec.
Можливий безпосередній перехід від розгону до гальмування, оскільки двигун завжди відстежує вихідну частоту інвертора.
Якщо відомий момент інерції валу електродвигуна, можна визначити оптимальні значення часу розгону і гальмування.
t acc = J x (n 2 -n 1) / [(T acc - T fric) x 9,55]
tdec = J x (n 2 -n 1) / [(T acc + T fric) x 9,55]
J – момент інерції валу електродвигуна.
T fric – момент тертя системи.
Т асс - надлишковий (перевантажувальний) момент, що використовується для розгону.
T dec - момент, що гальмує (момент гальмування), який виникає при зменшенні завдання швидкості.
n 1 і n 2 - швидкості обертання частотах f 1 і f 2 .
Якщо перетворювач частоти допускає короткочасний перевантажувальний момент, то моменти розгону і гальмування встановлюються рівними номінальному моменту, що крутить, електродвигуна Т. На практиці час розгону і час гальмування зазвичай однакові.
Приклад розрахунку
J = 0,042 кгм 2 T fric = 0,05 x M N , n 1 = 500 об / хв, n 2 = 1000 об / хв, Т N = 27 Нм
tacc = J х (n 2 - n 1) / [(Т ас - T fric) х 9,55] = 0,042 х (1000 - 500) / [(27,0 - (0,05 х 27,0)) х 9,55] = 0,1 [с]
Динамічне гальмування
Коли сигнал завдання швидкості знижується, електродвигун поводиться як генератор і гальмує. Уповільнення при гальмуванні залежить від величини навантаження електродвигуна.
Електродвигуни, підключені безпосередньо до мережі, віддають потужність гальмування у мережу.
Якщо електродвигун працює від перетворювача частоти, енергія гальмування зберігається у проміжному ланцюзі перетворювача частоти. Якщо потужність, що виділяється при гальмуванні, велика та перетворювач частоти не може розсіяти її за рахунок власної конструкції, напруга проміжного ланцюга зростає.
Напруга проміжного ланцюга може зростати до тих пір, поки перетворювач частоти не буде відключений засобами захисту, і іноді до проміжного ланцюга доводиться підключати навантаження у вигляді гальмівного модуля та зовнішнього резистора для поглинання потужності гальмування.
Використання гальмівного модуля та гальмівного резистора дозволяє здійснювати швидке гальмування при великих навантаженнях. Однак при цьому виникають проблеми, пов'язані з нагріванням. Іншим рішенням є використання блоку рекуперативного гальмування. Такі блоки застосовуються для перетворювачів частоти з некерованим випрямлячем і повертають енергію гальмування в мережу живлення.
У перетворювачах частоти з керованими випрямлячами потужність гальмування може повертатися в мережу (див. рис. 13) за допомогою, наприклад, інвертора, підключеного до випрямляча зустрічно-паралельно.

Рис. 13. Увімкнення гальмівного модуля та гальмівного резистора

Рис. 14. Інвертор, включений зустрічно-паралельно
Інший спосіб гальмування електродвигуна - гальмування постійним струмом. Для створення магнітного поляу статорі використовується напруга постійного струму, що подається між двома фазами електродвигуна. Оскільки енергія гальмування залишається в електродвигуні та можливе перегрів, гальмування постійним струмом рекомендується використовувати в діапазоні низьких швидкостей, щоб не перевищувати номінальний струм електродвигуна. Зазвичай гальмування постійним струмом обмежується в часі.
Реверс
Напрямок обертання асинхронних електродвигунів визначається порядком проходження фаз напруги живлення.
Якщо поміняти місцями дві фази, напрямок обертання електродвигуна зміниться, і він обертатиметься у протилежному напрямку.
Більшість електродвигунів сконструйовано таким чином, щоб змусити вал двигуна обертатися за годинниковою стрілкою, якщо з'єднання виконане таким чином:

Рис. 15. Напрямок обертання електродвигуна змінюється шляхом зміни порядку проходження фаз
Цьому правилу відповідає і порядок проходження фаз на вихідних клемах більшості перетворювачів частоти.
Перетворювач частоти може здійснювати реверс електродвигуна шляхом зміни порядку проходження фаз за допомогою електроніки. Реверс проводиться шляхом завдання негативної швидкості, або цифровим вхідним сигналом. Якщо при початковому введенні в експлуатацію потрібно, щоб електродвигун мав певний напрямок обертання, необхідно знати заводське налаштування частоти перетворювача за замовчуванням.
Оскільки перетворювач частоти обмежує струм електродвигуна номінальним значенням, двигун, керований перетворювачем частоти, можна реверсувати частіше, ніж двигун, підключений безпосередньо до мережі.
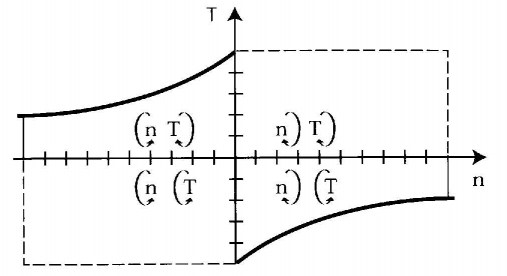
Рис. 16. Гальмівний момент перетворювача частоти під час реверсу
Рампи
Усі перетворювачі частоти мають функції зміни швидкості (рампи) забезпечення плавної роботи. Ці рампи можна змінювати і завдяки їм завдання швидкості можна збільшувати або зменшувати в певному інтервалі.
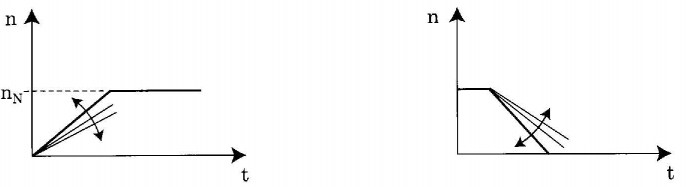
Рис. 17. Регульований час розгону та гальмування
Кут нахилу характеристики розгону/гальмування (тривалість розгону/гальмування) можна встановити таким малим, що в деяких ситуаціях електродвигун не зможе відпрацювати завдання (не зможе розігнати/гальмувати двигун за заданий час).
Це призводить до збільшення струму електродвигуна до тих пір, поки не буде досягнуто межі струму. У разі малого часу уповільнення (t -а) напруга проміжного ланцюга здатна зрости до такого рівня, що схема захисту частоти перетворювача зупинить перетворювач.
Оптимальний час зміни швидкості можна обчислити за наведеними нижче формулами.
a = J x n/[(T N -T fric)x9,55]
t -a = J x n/[(T N +T fric)x9,55]
ta - час збільшення швидкості
t -a – час зменшення швидкості
n – число оборотів
T N - номінальний крутний момент електродвигуна
T fric - момент тертя

Рис. 18. Встановлення часу зміни швидкості
Час розгону/гальмування зазвичай вибирається з номінальної швидкості електродвигуна.
Поточний контроль
Перетворювачі частоти можуть контролювати регульований процес і втручатися в нього при несправності.
Такий контроль може бути розділений на три види залежно від об'єкта: контроль технологічної установки, контроль електродвигуна та контроль перетворювача частоти.
Контроль встановленнязаснований на контролі вихідної частоти, вихідного струму і крутного моменту електродвигуна. З цих параметрів можна встановлювати кілька меж, перевищення яких впливає функцію управління. Цими межами можуть бути допустима найменша швидкість електродвигуна (мінімальна частота), допустимий найбільший струм(Межа по струму) або допустимий найбільший крутний момент електродвигуна (граничний крутний момент).
Перетворювач частоти може бути запрограмований, наприклад, на подачу попереджувального сигналу, зменшення швидкості електродвигуна або зупинки останнього у разі виходу його швидкості за встановлені межі.
приклад
В установках, що використовують для з'єднання електродвигуна з рештою системи клинової ремінь, перетворювач частоти може програмуватися на контроль стану цього ременя.
Оскільки у разі розриву ременя вихідна частота збільшуватиметься швидше, ніж визначається заданою рампою, у таких ситуаціях можна використовувати цю частоту для подачі попередження або зупинки електродвигуна.
Контроль електродвигунаможна проводити за допомогою перетворювача частоти шляхом моніторингу теплової моделі електродвигуна або підключення до електродвигуна термістора. Перетворювач частоти може запобігати перевантаженню електродвигуна, діючи подібно до термореле. У обчисленнях, що виробляються перетворювачем частоти, бере участь і вихідна частота. Це гарантує, що електродвигун не перевантажуватиметься на малих швидкостях через погіршення внутрішньої вентиляції. Сучасні перетворювачі частоти також здатні захищати електродвигуни з примусовою вентиляцією, якщо струм стає занадто великим.
Контроль перетворювача частотизазвичай проводиться в такий спосіб, що у разі навантаження струмом перетворювач відключається. Деякі перетворювачі допускають короткочасне перевантаження струмом. Мікропроцесор у перетворювачі частоти здатний одночасно враховувати значення струму електродвигуна та час його застосування, що забезпечує можливість оптимального використанняперетворювача частоти без навантаження.
За матеріалами Danfoss
При пуску, тобто при подачі напруги на нерухомий електродвигун, опір його мало і струм ротора має максимальне значення. Відповідно, максимальне значення має струм статора. Струм статора при пуску електродвигуна називається пусковим струмом. Початковий пусковий струмдорівнює струму трифазного КЗ за опором, що дорівнює опору нерухомого електродвигуна. Пусковий струм складається із змінної складової, що загасає в міру збільшення частоти обертання, і аперіодичної складової, що загасає протягом декількох періодів. У міру розвороту струм, споживаний електродвигуном, змінюється спочатку мало, і тільки при наближенні до синхронної частоти обертання швидко спадає. Пояснюється це характером зміни опору двигуна. Періодична складова пускового струму електродвигуна при нерухомому роторі в 4-8 разів перевищує Пік струму з урахуванням аперіодичної складової досягає:
Тривалість пуску електродвигунів як правило, не перевищує 10-15 с, і тільки у електродвигунів з важкими умовами пуску це значення може бути значно більшим.
При виникненні КЗ в мережі живленняпоблизу затискачів електродвигуна, останній за рахунок внутрішньої ЕРС, що підтримується енергією магнітного поля, посилає до місця КЗ швидко загасаючий струм. Кидки струму КЗ можуть досягати значень пускових струмів. Залежність моменту електродвигунів від напруги виражається формулою:
При КЗ в мережі напруга на затискачі електродвигунів знижується. В результаті цього, моменти електродвигунів зменшуються, і вони починають гальмуватися, збільшуючи ковзання доти, доки знову не відновиться рівність. Якщо при цьому виявиться, що електродвигун перебуватиме на межі стійкої роботи і мати ковзання, що дорівнює критичному. При подальшому зниженні напруги електродвигун гальмуватиметься аж до повної зупинки. Після відключення КЗ напруга живлення відновлюється, і подальша поведінка електродвигуна залежатиме від ковзання, що мало місце в момент відновлення напруги, і відповідних значень.
При електродвигуні розгорнеться до нормальної частоти обертання, а при М д< М с продовжуватиме гальмуватися до повної зупинки. В цьому випадку електродвигун необхідно відключити, оскільки він споживатиме пусковий струм, не маючи можливості розвернутися.
Самозапуск електродвигунівважче за звичайний запуск. Пояснюється це тим, що при самозапуску електродвигуни пускаються навантаженими, а електродвигуни з фазним ротором - без пускового реостата в ланцюзі ротора, що зменшує пусковий момент і збільшує пусковий струм і, нарешті, пускається велика кількість електродвигунів одночасно, що викликає падіння напруги в мережі живлення від сумарний пусковий струм. Однак самозапуск електродвигунів відбувається порівняно легко. Так самозапуск електродвигунів власних потреб електростанцій можливий навіть у тих випадках, коли в перший момент після відновлення напруги значення його становить При цьому загальний час самозапуску не перевищує 30-35 с, що припустимо їх нагрівання.
У разі обриву однієї із фаз обмотки статора електродвигун продовжує працювати. Частота обертання ротора при цьому дещо зменшується, а обмотки двох фаз, що залишилися в роботі, перевантажуються струмом в 1,5-2 рази більшим за номінальний. Захист від роботи на двох фазах застосовувався раніше лише на електродвигунах напругою до 500 В, захищених запобіжниками, якщо двофазний режим роботи може спричинити пошкодження електродвигуна. В даний час у зв'язку з високою вартістю двигунів високої напруги і високою ймовірністю не-повнофазних режимів в мережі живлення вважається доцільним, не вводячи спеціальний захиствід режиму роботи двома фазами, відключати двигуни захистом від перевантаження, яка має відповідні для цієї мети уставку. Токові органи захисту від перевантаження в цьому випадку повинні включатися не менше ніж у 2 фази трансформаторів струму двигунів.
Аналіз пошкоджень асинхронних двигунів показує, що основною причиною їхнього виходу з ладу є руйнування ізоляції через перегрівання.
Перевантаження електротехнічного виробу (пристрою)- перевищення фактичного значення потужності чи струму електротехнічного виробу (пристрою) над номінальним значенням. (ГОСТ 18311-80).
Температура нагрівання обмоток електродвигунаготелюзалежить від теплотехнічних характеристик двигуна та параметрів навколишнього середовища. Частина тепла, що виділяється в двигуні, йде на нагрівання обмоток, а решта віддається в навколишнє середовище. На процес нагрівання впливають такі фізичні параметри, як теплоємність та тепловіддача .
Залежно від теплового стану електродвигуна та навколишнього повітряступінь їхнього впливу може бути різною. Якщо різниця температур двигуна і навколишнього середовища невелика, а енергія, що виділяється значна, то її основна частина поглинається обмоткою, сталлю статора і ротора, корпусом двигуна та іншими його частинами. Відбувається інтенсивне зростання температури ізоляції. У міру нагрівання дедалі більше проявляється вплив тепловіддачі. Процес встановлюється після досягнення рівноваги між теплом і теплом, що виділяється в навколишнє середовище.
Підвищення струму понад допустиме значення не відразу призводить до аварійного стану. Потрібно деякий час, перш ніж статор та ротор нагріються до граничної температури. Тому немає потреби у тому, щоб захист реагував на кожне перевищення струму. Вона повинна відключати машину тільки у випадках, коли виникає небезпека швидкого зносу ізоляції.
З погляду нагріву ізоляції велике значення мають величина і тривалість перебігу струмів, що перевищують номінальне значення. Ці параметри залежать передусім від характеру технологічного процесу.
Перевантаження електродвигуна технологічного походження
 Перевантаження електродвигуна, спричинені періодичним збільшенням моменту на валу робочої машини.У таких верстатах та установках потужність електродвигуна постійно змінюється. Важко помітити скільки-небудь тривалий проміжок часу, протягом якого струм залишався б незмінним за величиною. На валу двигуна періодично виникають короткочасні великі моменти опору, що створюють кидки струму.
Перевантаження електродвигуна, спричинені періодичним збільшенням моменту на валу робочої машини.У таких верстатах та установках потужність електродвигуна постійно змінюється. Важко помітити скільки-небудь тривалий проміжок часу, протягом якого струм залишався б незмінним за величиною. На валу двигуна періодично виникають короткочасні великі моменти опору, що створюють кидки струму.
Такі навантаження зазвичай не викликають перегріву обмоток електродвигуна, що мають порівняно велику теплову інерцію. Однак при досить великій тривалості та неодноразовій повторності створюється. Захист має "розрізняти" ці режими. Вона має реагувати на короткочасні поштовхи навантаження.
В інших машинах можуть виникати порівняно невеликі, але тривалі навантаження. Обмотки електродвигуна поступово нагріваються до температури, близької до гранично допустимого значення. Зазвичай електродвигун має деякий запас нагрівання, і невеликі перевищення струму, незважаючи на тривалість дії, не можуть створити небезпечної ситуації. І тут відключення необов'язково. Таким чином, і тут захист електродвигуна повинен "розрізняти" небезпечне навантаження від безпечного.
Крім перевантажень технологічного походження, можуть бути аварійні навантаження, що виникають з інших причин (аварія в лінії живлення, заклинювання робочих органів, зниження напруги та ін). Вони створюють своєрідні режими роботи асинхронного двигунаі висувають свої вимоги до засобів захисту. Розглянемо поведінку асинхронного двигуна у характерних аварійних режимах.
Перевантаження при тривалому режимі роботи з постійним навантаженням
Зазвичай електродвигуни вибирають із деяким запасом за потужністю. Крім того, велику частинучасу машини працюють із недовантаженням. В результаті струм двигуна часто значно нижчий за номінальне значення. Перевантаження виникають, як правило, при порушеннях технології, поломках, заїданні та заклинювання в робочій машині.
Такі машини, як вентилятори, відцентрові насоси, стрічкові та шнекові транспортери, мають спокійне постійне або слабке навантаження. Короткочасні зміни подачі матеріалу практично не впливають на нагрівання електродвигуна. Їх можна не брати до уваги. Інша річ, якщо порушення нормальних умов роботи залишаються на тривалий час.
Більшість електроприводів мають певний запас потужності. Механічні навантаження передусім викликають поломки деталей машини. Однак, зважаючи на випадковий характер їх виникнення, не можна бути впевненим, що за певних обставин виявиться перевантаженим і електродвигун. Наприклад, це може статися з двигунами шнекових транспортерів. Зміна фізико-механічних властивостей матеріалу, що транспортується (вологість, крупність частинок і т. д.) негайно відбивається на потужності, необхідної на його переміщення. Захист повинен відключати електродвигун у разі перевантажень, що викликають небезпечний перегрів обмоток.

З точки зору впливу тривалих перевищень струму на ізоляцію слід розрізняти два види навантажень за величиною: порівняно невеликі (до 50%) і великі (більше 50%).
Дія перших проявляється не відразу, а поступово, тоді як наслідки других проявляються через короткий час. Якщо перевищення температури над допустимим значенням невелике, старіння ізоляції відбувається повільно. Невеликі зміни у структурі ізолюючого матеріалу накопичуються поступово. У міру підвищення температури процес старіння значно прискорюється.
Вважають що перегрів понад допустиме на кожні 8 - 10°С скорочує термін служби ізоляції обмоток електродвигуна вдвічі.Таким чином, перегрів на 40 ° С скорочує термін служби ізоляції в 32 рази!Хоч це і багато, але виявляється воно після багатьох місяців експлуатації.
При великих перевантаженнях (понад 50%) ізоляція швидко руйнується під впливом високої температури.
Для аналізу процесу нагрівання скористаємося спрощеною моделлю двигуна. Підвищення струму викликає збільшення змінних втрат. Обмотка починає нагріватись. Температура ізоляції змінюється відповідно до графіка малюнку. Величина перевищення температури, що встановилося, залежить від величини струму.
Через деякий час після виникнення навантаження температура обмоток досягає допустимого для даного класу ізоляції значення. При великих перевантаженнях воно буде коротшим, при малих - довшим. Таким чином, кожному значенню навантаження буде відповідати своє допустимий час, Яке можна вважати безпечним для ізоляції.
Залежність допустимої тривалості навантаження від її величини називається перевантажувальною характеристикою електродвигуна. Теплофізичні властивості мають деякі відмінності, також відрізняються їх характеристики. На малюнку суцільною лінією показано одну з таких характеристик.

З наведеної характеристики можна сформулювати одна з основних вимог. Вона має спрацьовувати залежно від величини навантаження. Е дозволяє виключити помилкові спрацьовування при безпечних кидках струму, що виникають, наприклад, при пуску двигуна. Захист повинен спрацьовувати лише при попаданні в область неприпустимих значень струму та тривалості його протікання. Її бажана характеристика, показана на малюнку пунктирною лінією, повинна розташовуватися під перевантажувальною характеристикою двигуна.
На роботу захисту впливає ряд факторів (неточність налаштування, розкид параметрів та ін.), внаслідок дії яких спостерігаються відхилення від середніх значень часу спрацьовування. Тому пунктирну криву на графіку слід розглядати як середню характеристику. Для того щоб у результаті дії випадкових факторів характеристики не перетнулися, що викличе неправильне відключення двигуна, необхідно забезпечити певний запас. Фактично доводиться мати справу не з окремою характеристикою, а із захисною зоною, що враховує розкид часу спрацьовування захисту.
 З погляду точного дії захисту електродвигунабажано, щоб обидві характеристики були по можливості близькі одна до одної. Це дозволить уникнути непотрібного відключення при перевантаженнях, близьких до допустимих. Однак за наявності великого розкиду обох характеристик досягти цього неможливо. Щоб не потрапити в зону неприпустимих значень струму при випадкових відхиленнях від розрахункових параметрів, необхідно забезпечити певний запас.
З погляду точного дії захисту електродвигунабажано, щоб обидві характеристики були по можливості близькі одна до одної. Це дозволить уникнути непотрібного відключення при перевантаженнях, близьких до допустимих. Однак за наявності великого розкиду обох характеристик досягти цього неможливо. Щоб не потрапити в зону неприпустимих значень струму при випадкових відхиленнях від розрахункових параметрів, необхідно забезпечити певний запас.
Характеристика захисту повинна розташовуватися на деякій відстані від перевантажувальної характеристики двигуна, щоб унеможливити їх взаємне перетин. Але при цьому виходить програш у точності дії захисту електродвигуна.
У сфері струмів, близьких до номінального значення, утворюється зона невизначеності. При попаданні в цю зону не можна точно сказати, чи спрацює захист чи ні.
Такий недолік відсутній у . На відміну від струмового захисту вона діє залежно від причини, що викликає старіння ізоляції, її нагрівання. При досягненні небезпечної для обмотки температури вона відключає двигун незалежно від причини, що спричинила нагрівання. Це - одна з головних переваг температурного захисту.
Однак не слід перебільшувати нестачу струмового захисту. Справа в тому, що двигуни мають певний запас струму. Номінальний струмелектродвигуна завжди нижче за той струм, при якому температура обмоток досягає допустимого значення. Його встановлюють, керуючись економічними розрахунками. Тому при номінальному навантаженні температура обмоток двигуна нижче за допустиме значення. За рахунок цього і створюється тепловий резерв двигуна, який певною мірою компенсує нестачу.
Багато чинників, яких залежить тепловий стан ізоляції, мають випадкові відхилення. У зв'язку з цим уточнення характеристик який завжди дають бажаний результат.
Перевантаження при змінному тривалому режимі роботи
 Деякі робочі органи та механізми створюють навантаження, що змінюється у великих межах, як, наприклад, машини для дроблення, подрібнення та інших аналогічних операцій. Тут періодичні навантаження супроводжуються недовантаженнями аж до роботи на холостому ході. Кожне збільшення струму, взяте окремо, не призводить до небезпечного зростання температури. Однак, якщо їх багато і вони повторюються досить часто, вплив підвищеної температури на ізоляцію швидко накопичується.
Деякі робочі органи та механізми створюють навантаження, що змінюється у великих межах, як, наприклад, машини для дроблення, подрібнення та інших аналогічних операцій. Тут періодичні навантаження супроводжуються недовантаженнями аж до роботи на холостому ході. Кожне збільшення струму, взяте окремо, не призводить до небезпечного зростання температури. Однак, якщо їх багато і вони повторюються досить часто, вплив підвищеної температури на ізоляцію швидко накопичується.
Процес нагрівання електродвигунапри змінному навантаженні відрізняється від процесу нагрівання при постійному або слабко вираженому змінному навантаженні. Відмінність проявляється як під час зміни температури, і у характері нагрівання окремих частин машини.
Після змінами навантаження змінюється і температура обмоток. Через теплову інерцію двигуна коливання температури мають менший розмах. При достатньо високій частотіНавантаження температуру обмоток можна вважати практично незмінною. Такий режим роботи буде еквівалентний тривалому режиму з постійним навантаженням. При низькій частоті (порядку сотих часток герца і нижче) коливання температури стають відчутними. Періодичні перегріви обмотки можуть скоротити термін служби ізоляції.
При великих коливаннях навантаження з низькою частотою електродвигун постійно перебуває у перехідному процесі. Температура його обмотки змінюється за коливаннями навантаження. Так як окремі частини машини мають різні теплофізичні параметри, то кожна з них нагрівається по-своєму.
Перебіг теплових перехідних процесів при навантаженні, що змінюється - явище складне і не завжди піддається розрахунку. Тому про температуру обмоток двигуна не можна судити за струмом, що протікає в даний момент часу. Зважаючи на те, що окремі частини електродвигуна нагріваються по-різному, усередині електродвигуна відбуваються перетікання тепла з однієї її частини до інших. Можливо і так, що після відключення електродвигуна температура обмоток статора зростатиме за рахунок тепла, що надходить від ротора. Таким чином, величина струму може не відображати ступінь нагрівання ізоляції. Слід також взяти до уваги, що при деяких режимах ротор нагріватиметься інтенсивніше, а охолоджуватиметься менш інтенсивно, ніж статор.
Складність процесів теплообміну ускладнює контроль нагрівання електродвигуна. Навіть безпосередній вимір температури обмоток може за певних умов дати похибку. Справа в тому, що при теплових процесах, що не встановилися, температура нагрівання різних частин машини може бути різною і вимірювання в одній точці не може дати істинної картини. Проте, порівняно з іншими методами, вимірювання температури обмотки дає більш точний результат.
Можна віднести до найбільш несприятливого з погляду дії захисту. Періодичне включення в роботу передбачає можливість короткочасного навантаження двигуна. При цьому величина перевантаження повинна бути обмежена за умовою нагрівання обмоток не вище за допустиме значення.
Захист, що "стежить" за станом нагріву обмотки, повинен отримувати відповідний сигнал. Так як в перехідних режимах струм і температура можуть не відповідати один одному, то захист, дія якого заснована на вимірюванні струму, не може виконувати належним чином свою роль.
Час пуску є одним із головних факторів при виборі двигуна. У момент пуску двигун споживає з мережі пусковий струм, що перевищує номінальний у 5-7 разів (для асинхронних двигунів із коротко-замкненим ротором). При цьому відбувається посилене нагрівання обмоток, і якщо час пуску затягується, температура обмоток може перевищити допустиму.
Отже, велике значення для часу розгону має кратність пускового моменту. Тому для компресорних приводів рекомендується використовувати електродвигуни з підвищеним пусковим моментом (АОП).
Для агрегатів малої та середньої потужностічас пуску при порівняно рідкісних пусках зазвичай вбирається у 3-5 з, для потужних агрегатів - 20-30 з.
Момент на валу асинхронного двигуна пропорційний квадрату напруги. Таким чином, навіть невелике пониження напруги в момент пуску різко знижує пусковий момент. Можливі випадки в мережах невеликих потужностей, коли агрегат не може бути пущений у хід при повному навантаженні. Тому, вибираючи двигун, визначають величину мінімально допустимої напруги, при якому агрегат може бути пущений у хід.
Мінімальний надлишковий момент, що забезпечує розгін приводу, має бути не менше 0,1 номінального моментуелектродвигуна. Статичний момент компресора приймається постійним за час пуску та рівним номінальному (пуск без розвантаження). Якщо мережа має недостатню потужність і зниження напруги може виявитися при пуску більше за розрахунковий, то пуск слід проводити при розвантаженому компресорі. Якщо такий пуск неможливий, двигун із коротко-замкненим ротором треба замінити на двигун із фазним ротором або змінити схему пуску (застосувати схему з обмеженням пускового струму).
Електротехніка схеми управління електроприводом враховує вплив зниження напруги працювати апаратури пуску і управління (пускачі, реле тощо.). Розвиток сучасних компресорів спрямовано використання їх приводу вбудованих електродвигунів для малих, середніх і великих машин.
Дослідження пускових моментів поршневих холодильних компресорів з вбудованими електродвигунами дозволили зробити певні висновки щодо використання останніх приводу деяких типів компресорів. Так, застосування вбудованих електродвигунів дозволяє досягти повної герметизації холодильного компресора, відмовитися від використання проміжних ланок (привідні ремені, муфти тощо), що підвищує надійність установки та зменшує кількість металу, що використовується. Крім того, охолодження обмотки електродвигуна парами холодильного агента знижує його габарити за рахунок підвищення питомого навантаження.
Вбудовані електродвигуни мають меншу вартість, порівняно з електродвигунами звичайного виконання.
Робота компресорів у широкому діапазоні температур кипіння та конденсації вимагає від вбудованих електродвигунів високих к.п.д. та коефіцієнта потужності cos Ф при зміні навантаження у значних межах. Необхідні також хороше охолодження обмоток електродвигуна та надійний запуск компресора у всьому діапазоні робочих температур.
Зі зменшенням пускового моменту двигуна подовжується процес пуску, відбувається перегрів ізоляції, скорочення терміну її служби. Завищення пускового моменту зменшує к.п.д. та cos Ф двигуна та його перевантажувальну здатність.
Таким чином, завдання підбору електродвигуна за пусковим моментом тісно пов'язане з надійністю та економічністю холодильної установки.
Дослідження показали, що зі збільшенням числа циліндрів компресора, махового моменту зменшення ступеня стиснення кратність пускового моменту зменшується.
Експериментальні дані дозволяють деяким близьким по конструкції компресорів (герметичних, безсальникових) встановити таке:
- визначаючи пусковий момент електродвигуна, необхідно враховувати дію махових мас електродвигуна та компресора, витік газу з циліндрів при малих швидкостях та номінальних оборотах;
- чим менше число циліндрів компресора і вище ступінь стиснення, тим більша кратність пускового моменту електродвигуна більша;
- якщо число циліндрів компресора більше чотирьох і пуск проводиться при малих ступенях стиснення, можна використовувати електродвигун нормального виконання, а не з підвищеною кратністю моменту пуску.
Ці дані можуть бути поширені і на компресори, близькі конструкції до випробуваних.