Tiesioginis paleidimas yra labiausiai paplitęs indukcinio variklio užvedimo būdas voverės narvelio rotorius. Variklis yra tiesiogiai prijungtas prie elektros tinklo per starterį. Šiuo atveju asinchroninis variklis su voverės narveliu sukuria didelį paleidimo momentą ir gana trumpą pagreičio laiką. Šis metodas dažniausiai taikomas mažos ir vidutinės galios varikliams, kurie per trumpą laiką pasiekia visą darbo greitį.
Tiesioginis startas. Šis metodas naudojamas pradėti indukciniai varikliai su voverės narvelio rotoriumi. Šio tipo mažos ir vidutinės galios varikliai dažniausiai projektuojami taip, kad statoriaus apviją tiesiogiai prijungus prie tinklo, susidariusios paleidimo srovės nesudarytų pernelyg didelių elektrodinaminių jėgų ir temperatūros kilimo, kuris yra pavojingas mechaniniu ir pagrindinių mašinos elementų šiluminis stiprumas.
Asinchroniniuose varikliuose L/R santykis yra santykinai mažas (ypač mažuose varikliuose), todėl pereinamasis įjungimo momentu pasižymi labai greitu laisvosios srovės susilpnėjimu. Tai leidžia nepaisyti laisvosios srovės ir atsižvelgti tik į pastovią pereinamosios srovės vertę.
Varikliai dažniausiai paleidžiami naudojant elektromagnetinį jungiklį K - magnetinį starterį (4.27 pav., a) ir įsibėgėja automatiškai pagal natūralią mechaninę charakteristiką M (4.27.6 pav.) iš taško P, atitinkančio pradinį paleidimo momentą, į tašką. P, atitinkanti sąlygą M = Mst . Pagreitis pagreičio metu nustatomas pagal skirtumą tarp M ir Mst kreivių abscisių ir variklio rotoriaus bei sukimosi mechanizmo inercijos momento. Jei pradiniu paleidimo momentu Mp< Мст, двигатель разогнаться не сможет.
Pradinio paleidimo momento reikšmę galima gauti iš (4.46a) formulės, darant prielaidą, kad
Mn \u003d m1 U12R "2 / (w1 [(R1 + R" 2) 2 + (X1 + X "2) 2]).
Momentų santykis Mp / Mnom = kp.m vadinamas pradinio paleidimo momento dauginimu. Varikliams su voverės narvelio rotoriumi, kurių galia 0,6-100 kW, GOST nustato kp.m = 1,0÷2,0; galia 100-1000 kW - kp.m = 0,7÷1,0.
Paprastai nepageidautina, kad pradinis sukimo momento santykis būtų didesnis nei reguliuojamas GOST, nes tai yra dėl padidėjusio aktyvus pasipriešinimas rotorius (žr. 4.58), arba pakeitus rotoriaus konstrukciją (žr. § 4.11), dėl ko pablogėja variklio energinis naudingumas.
Šio paleidimo būdo trūkumas, be palyginti mažo paleidimo momento, yra ir didelis metimas paleidimo srovė, nuo penkių iki septynių kartų didesnė už vardinę srovę.
Nepaisant šių trūkumų, variklio užvedimas tiesiogiai prijungus statoriaus apviją prie tinklo yra plačiai naudojamas dėl paprastumo ir gerų voverės narvelio variklio techninių ir ekonominių savybių - mažos kainos ir didelio energetinio naudingumo (η, cos φ1, km, ir tt).
Žemos įtampos paleidimas. Toks paleidimas naudojamas asinchroniniams varikliams su didelės galios voverės narvelio rotoriumi, taip pat vidutinės galios varikliams su nepakankamai galingais elektros tinklais. Įtampos mažinimas gali būti atliekamas šiais būdais:
a) perjungiant statoriaus apviją jungikliu iš įprastos grandinės Δ į paleidimo grandinę Y. Šiuo atveju statoriaus apvijos fazių įtampa sumažėja √3 kartus, dėl to fazių srovės sumažėja √3 kartus ir tiesinės srovės 3 kartus. Pasibaigus variklio užvedimo ir pagreitinimo iki vardinio apsisukimų dažnio procesui, statoriaus apvija vėl perjungiama į įprastą grandinę;
b) įtraukimas į statoriaus apvijos grandinę paleidimo laikotarpiui papildomų aktyviųjų (rezistorių) arba reaktyviųjų (reaktorių) varžų (4.28 pav., a). Tokiu atveju ant nurodytų varžų sukuriami tam tikri įtampos kritimai ΔUadd, kurie yra proporcingi paleidimo srovei, dėl to statoriaus apvijai patenka sumažinta įtampa. Varikliui įsibėgėjant, mažėja rotoriaus apvijoje indukuota EDSE2, taigi, ir paleidimo srovė. Dėl to sumažėja įtampos kritimas ΔUadd esant nurodytoms varžoms, o varikliui tiekiama įtampa automatiškai didėja. Pasibaigus pagreitinimui, papildomi rezistoriai arba reaktoriai trumpai jungiami kontaktoriumi K1;
c) variklio prijungimas prie tinklo per laipsninį autotransformatorių ATP (4.28.6 pav.), kuris paleidimo metu gali turėti keletą pakopų, perjungiamų atitinkama įranga.
Šių užvedimo mažinant įtampą metodų trūkumas yra žymiai sumažėjęs variklio paleidimo ir maksimalus sukimo momentas, kuris yra proporcingas taikomos įtampos kvadratui, todėl juos galima naudoti tik paleidžiant variklius be apkrovos.
Ant pav. Pavyzdžiui, 4.29 parodytos variklio mechaninės charakteristikos esant vardinei ir sumažintai įtampai, t.y. kai statoriaus apvija prijungta pagal Y ir Δ schemas, taip pat srovės I1 ir sukimo momento M grafikai užvedant variklį statoriaus apvijos perjungimas iš Y į Δ. Sujungus pagal Y schemą, maksimalus ir paleidimo momentas sumažėja tris kartus, dėl to variklis negali paleisti mechanizmo apkrovos sukimo momentu Mn.
Asinchroninio variklio paleidimas
Paleidimo metu n=0, t.y. slydimas S=1. Nes srovės rotoriaus ir statoriaus apvijose priklauso nuo slydimo ir didėja jam didėjant, variklio paleidimo srovė yra 5 ÷ 8 kartus didesnė už vardinę srovę
Istart=(5÷8)In.
Kaip aptarta anksčiau, dėl didelio rotoriaus EMF dažnio indukciniai varikliai turi ribotą paleidimo momentą.
Mstart=(0,8÷1,8)Mn.
Norint užvesti variklį, būtina, kad jo sukurtas paleidimo sukimo momentas viršytų veleno apkrovos momentą. Priklausomai nuo maitinimo šaltinių galios ir paleidimo sąlygų, naudojami skirtingi paleidimo būdai, kurių tikslai: sumažinti paleidimo srovę ir padidinti paleidimo momentą.
Yra šie indukcinių variklių paleidimo būdai: tiesioginis ryšysį grandinę, žemos įtampos paleidimas, pasipriešinimo paleidimas, patobulintų paleidimo savybių variklių naudojimas.
2.11.1. Tiesioginis prisijungimas prie tinklo
Tai lengviausias ir pigiausias būdas pradėti. Variklis vardine įtampa tiekiamas rankiniu būdu arba nuotolinio valdymo pultu. Tiesioginis prisijungimas prie tinklo leidžiamas, jei variklio galia neviršija 5% transformatoriaus galios, jei iš jo maitinamas ir apšvietimo tinklas. Galios apribojimas paaiškinamas srovės šuoliais paleidimo momentu, dėl kurio sumažėja įtampa antrinių transformatoriaus apvijų gnybtuose. Jei apšvietimo tinklas nėra tiekiamas iš transformatoriaus, tada tiesioginis prijungimas prie tinklo gali būti naudojamas varikliams, kurių galia neviršija 25% transformatoriaus galios.
2.11.2. Sumažėjusios įtampos paleidimas
Šis metodas naudojamas paleidžiant galingus variklius, kuriems tiesioginis prisijungimas prie tinklo yra nepriimtinas. Norint sumažinti įtampą, tiekiamą į statoriaus apviją, naudojami droseliai ir automatiniai transformatoriai. Po paleidimo į statoriaus apviją tiekiama tinklo įtampa.
Įtampa sumažinama siekiant sumažinti paleidimo srovę, tačiau tuo pačiu metu, kaip parodyta Fig. 2.17 ir 2.17.b, paleidimo momentas mažėja. Jei įtampa paleidimo metu sumažinama koeficientu, paleidimo momentas sumažės 3 kartus. Todėl šis paleidimo būdas gali būti naudojamas tik tada, kai velenui nėra apkrovos, t.y. tuščiosios eigos režimu.
Jei pagal paso duomenis variklis turi būti prijungtas prie tinklo pagal trikampio schemą, tada norint sumažinti paleidimo srovę paleidimo metu, statoriaus apvija prijungiama pagal žvaigždžių schemą.
Pagrindiniai šio paleidimo būdo trūkumai yra didelė paleidimo įrangos kaina ir neįmanoma užvesti esant apkrovai ant veleno.
Veikiant daugeliui mechanizmų, varomų asinchroniniais varikliais, laikantis technologinių reikalavimų, atsiranda būtinybė reguliuoti šių mechanizmų sukimosi greitį. Asinchroninių variklių sukimosi dažnio (greičio) valdymo metodai atskleidžia santykį:
n=(1-S)n0=(1-S)60f/p.
Iš to išplaukia, kad esant tam tikrai veleno apkrovai, rotoriaus greitį galima reguliuoti:
slydimo keitimas;
stulpų porų skaičiaus pokytis;
keičiant maitinimo dažnį.
2.12.1. Slydimo keitimas
Šis metodas naudojamas varant tuos mechanizmus, kuriuose sumontuoti asinchroniniai varikliai su faziniu rotoriumi. Pavyzdžiui, vairuojant kėlimo ir transportavimo mašinas. Į fazinio rotoriaus grandinę įvedamas reguliavimo reostatas. Rotoriaus aktyviosios varžos padidėjimas neturi įtakos kritinio momento dydžiui, bet padidina kritinį slydimą (2.21 pav.).
Ant pav. 2.21 parodytos asinchroninio variklio su skirtingomis reguliavimo reostato varžomis mechaninės charakteristikos Rp3> Rp2> 0, Rp1=0.
Kaip matyti iš Fig. 2.21 Naudodami šį metodą galite sumažinti didelį greičio valdymo diapazoną. Pagrindiniai šio metodo trūkumai:
Dėl didelių nuostolių ant reguliavimo reostato sumažėja efektyvumas, t.y. neekonomiškas būdas.
Asinchroninio variklio mechaninė charakteristika tampa minkštesnė, padidėjus aktyviajai rotoriaus varžai, t.y. sumažėja variklio stabilumas.
Neįmanoma sklandžiai reguliuoti greičio.
Dėl šių trūkumų šis metodas naudojamas trumpalaikiam sukimosi greičio mažinimui.
Asinchroninių variklių greičio reguliavimas
Iš formulės išplaukia, kad asinchroninio variklio rotoriaus sukimosi greitį galima valdyti šiais būdais: keičiant maitinimo įtampos dažnį f1, polių porų skaičių p ir slydimo dydį s.
Dažnio reguliavimas. Šis metodas leidžia sklandžiai keisti greitį plačiame diapazone. Jai įgyvendinti būtina, kad variklis būtų maitinamas iš atskiro šaltinio (2.18 pav.). 
Kaip toks šaltinis, šiuo metu plačiausiai naudojami puslaidininkiniai statiniai dažnio keitikliai.
Priklausomai nuo reikalavimų asinchroninio variklio mechaninėms charakteristikoms reguliuojant dažnį, kartu su dažnio f1 pasikeitimu, pagal tam tikrą dėsnį būtina pakeisti į statoriaus apviją tiekiamą įtampą U1.
Didžiausias variklio sukimo momentas yra apytiksliai (neatsižvelgiant į pasipriešinimą r1) nustatomas pagal (2.40),
![]() .
.
Atsižvelgdami į tai, gauname
Jei, valdant greitį, reikalaujama, kad bet kuriuo dažniu f1 didžiausias sukimo momentas liktų nepakitęs (reguliavimas su), tada gauname
iš kur išplaukia, kad norint reguliuoti n2 ties reikia keisti į statoriaus apviją tiekiamą įtampą U1 proporcingai jos dažniui. Šiuo atveju pagrindinis mašinos magnetinis srautas esant skirtingoms dažnio f1 reikšmėms išlieka nepakitęs, t.y.
![]() (2.56)
(2.56)
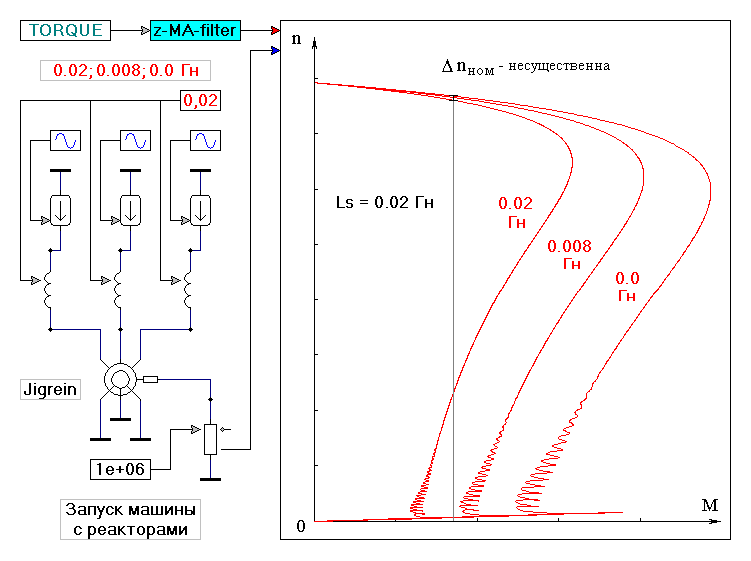
Asinchroninio variklio mechaninės charakteristikos reguliuojant Mmax = const parodytos 2.19 pav. 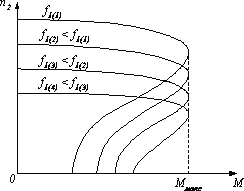
Dažnio reguliavimo trūkumas yra gana didelė keitiklių įrengimo kaina.
Greičio reguliavimas keičiant statoriaus apvijų polių porų skaičių. Norint įgyvendinti šį reglamentą, ant statoriaus bendruose grioveliuose dedamos ne viena, o dvi apvijos 
skirtingam aukščiui, taigi ir skirtingam polių porų skaičiui. Priklausomai nuo reikalingo greičio, viena ar kita apvija prijungiama prie tinklo. Šis metodas naudojamas palyginti retai, nes taip yra reikšmingas trūkumas- mažas apvijos vielos naudojimas (veikia tik viena iš apvijų).
Daug dažniau polių porų skaičiaus pokytis pasiekiamas pakeitus (perjungiant) statoriaus apvijos jungimo schemą. Tokio perjungimo principas parodytas 2.20 pav.
Perjungiant nuo nuoseklaus dviejų ritių jungimo prie lygiagrečios, polių porų skaičius pasikeičia nuo 2 iki 1. Jei ant rotoriaus yra fazinė apvija, ją taip pat reikia perjungti kartu su statoriaus apvija, kuri yra didelis trūkumas. Todėl šis greičio reguliavimo būdas naudojamas tik varikliams su voverės narvelio rotoriumi.
Asinchroniniai varikliai, perjungiantys polių porų skaičių, vadinami kelių greičių varikliais. Jie yra dviejų, trijų ir keturių greičių. Yra žinoma daug grandinių, leidžiančių perjungti polių porų skaičių. Šios schemos skirstomos į pastovaus sukimo momento valdymo schemas ir pastovios galios valdymo schemas. Dviejų greičių variklių mechaninės charakteristikos parodytos 2.21 pav.

2.20 pav. Polių porų skaičiaus keitimas perjungiant apvijų ritinius:
a – dvi poros stulpų; b - viena stulpų pora
2.21 pav. Dviejų greičių variklio mechaninės charakteristikos
su polių porų skaičiaus perjungimu santykiu 2:1
esant pastoviam sukimo momentui (a) ir pastoviai galiai (b)
Iš visų būdų, kaip valdyti asinchroninių variklių greitį, polių porų skaičiaus perjungimo būdas yra ekonomiškiausias, nors jis taip pat turi trūkumų:
- varikliai turi palyginti didelius matmenis ir svorį, palyginti su įprastos konstrukcijos varikliais;
– žingsnio greičio valdymas.
Staklėms ir įvairiems mechanizmams varyti naudojami kelių greičių varikliai, kurių sukimosi greitis turi būti reguliuojamas plačiu diapazonu (pavyzdžiui, liftų asinchroniniai varikliai).
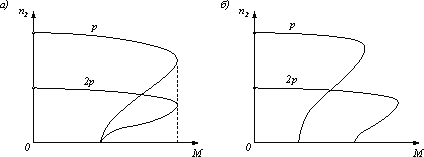
Greičio reguliavimas keičiant maitinimo įtampą. Nurodytas reguliavimas gali būti atliekamas naudojant tiristoriaus įtampos reguliatorių PH (2.22 pav.). 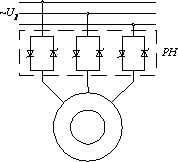
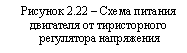
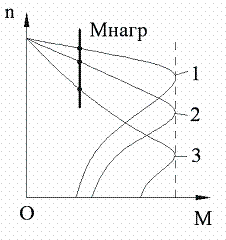
Kadangi asinchroninio variklio sukimo momentas yra proporcingas, mechaninės charakteristikos esant žemesnei nei vardinei įtampai bus mažesnės už natūraliąją (2.23 pav.). 
Jei pasipriešinimo momentas MC išlieka pastovus, tai, kaip matyti iš 2.23 pav., nukritus įtampai, variklio slydimas
dideja.
Tokiu atveju rotoriaus greitis mažėja.
Tokiu būdu slydimo reguliavimas yra įmanomas viduje
0 < s < sкр.
Tolesnis įtampos sumažėjimas (žemiau U1(2)) yra nepriimtinas, nes šiuo atveju Mmax< MС и двигательостановится.
Variklių greičio reguliavimas keičiant įėjimo įtampą U1 turi reikšmingą trūkumą: tokiu atveju didėja nuostoliai, taigi ir sumažėja variklio efektyvumas. Kai įtampa proporcingai mažėja U1, sumažėja pagrindinis mašinos magnetinis srautas, dėl to, esant M = MС = const, padidėja srovė rotoriaus apvijoje ir atitinkamai elektros nuostoliai rotoriuje. Sumažėja statoriaus plieno magnetiniai nuostoliai. Paprastai, kai variklio apkrovos yra artimos vardinėms, U1 sumažėjimas padidina bendruosius nuostolius ir padidina variklių įkaitimą. Todėl aptariamas greičio reguliavimo būdas daugiausia naudojamas mažos galios mašinoms.
Asinchroninių variklių greičio valdymas įtraukiant papildomą aktyvią varžą į rotoriaus grandinę. Šis valdymo būdas naudojamas tik varikliuose su faziniu rotoriumi. Tai leidžia sklandžiai keisti greitį plačiame diapazone (2.24 pav.). Jo trūkumai: dideli energijos nuostoliai esant papildomoms varžoms, pernelyg „minkštos“ mechaninės variklio charakteristikos su dideliu pasipriešinimu rotoriaus grandinėje. Kai kuriais atvejais pastarasis yra nepriimtinas, nes nedidelis apkrovos sukimo momento pokytis atitinka reikšmingą greičio pokytį. Praktikoje šis metodas daugiausia naudojamas mažų variklių greičiui valdyti, pavyzdžiui, kėlimo įrenginiuose. 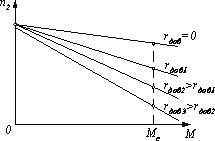
![]()
Taikant šį variklio sūkių skaičiaus valdymo būdą, į rotoriaus grandinę įtrauktas reguliavimo reostatas (papildoma aktyvioji varža) turi būti suprojektuotas ilgalaikiam darbui. Todėl paleidimo reostatai, skirti trumpalaikiam srovės tekėjimui paleidimo metu, negali būti naudojami kaip reguliuojantys.
Tiesioginis paleidimas yra labiausiai paplitęs voverės narvelio asinchroninio variklio užvedimo būdas. Variklis yra tiesiogiai prijungtas prie elektros tinklo per starterį. Šiuo atveju asinchroninis variklis su voverės narveliu sukuria didelį paleidimo momentą ir gana trumpą pagreičio laiką. Šis metodas dažniausiai taikomas mažos ir vidutinės galios varikliams, kurie per trumpą laiką pasiekia visą darbo greitį.
Tiesioginis startas. Šis metodas naudojamas asinchroniniams varikliams su voverės narvelio rotoriumi paleisti. Šio tipo mažos ir vidutinės galios varikliai dažniausiai projektuojami taip, kad statoriaus apviją tiesiogiai prijungus prie tinklo, susidariusios paleidimo srovės nesudarytų pernelyg didelių elektrodinaminių jėgų ir temperatūros kilimo, kuris yra pavojingas mechaniniu ir pagrindinių mašinos elementų šiluminis stiprumas.
Asinchroniniuose varikliuose L/R santykis yra santykinai mažas (ypač mažuose varikliuose), todėl pereinamasis įjungimo momentu pasižymi labai greitu laisvosios srovės susilpnėjimu. Tai leidžia nepaisyti laisvosios srovės ir atsižvelgti tik į pastovią pereinamosios srovės vertę.
Varikliai dažniausiai paleidžiami naudojant elektromagnetinį jungiklį K - magnetinį starterį (4.27 pav., a) ir įsibėgėja automatiškai pagal natūralią mechaninę charakteristiką M (4.27.6 pav.) iš taško P, atitinkančio pradinį paleidimo momentą, į tašką. P, atitinkanti sąlygą M = Mst . Pagreitis pagreičio metu nustatomas pagal skirtumą tarp M ir Mst kreivių abscisių ir variklio rotoriaus bei sukimosi mechanizmo inercijos momento. Jei pradiniu paleidimo momentu Mp< Мст, двигатель разогнаться не сможет.
Pradinio paleidimo momento reikšmę galima gauti iš (4.46a) formulės, darant prielaidą, kad
Mn \u003d m1 U12R "2 / (w1 [(R1 + R" 2) 2 + (X1 + X "2) 2]).
Momentų santykis Mp / Mnom = kp.m vadinamas pradinio paleidimo momento dauginimu. Varikliams su voverės narvelio rotoriumi, kurių galia 0,6-100 kW, GOST nustato kp.m = 1,0÷2,0; galia 100-1000 kW - kp.m = 0,7÷1,0.
Paprastai nepageidautina pasiekti didesnius nei reguliuojamus GOST paleidimo sukimo momento santykius, nes tai yra susiję arba su rotoriaus aktyviosios varžos padidėjimu (žr. 4.58), arba su rotoriaus konstrukcijos pasikeitimu (žr. § 4.11), kuris pablogina variklio energetines savybes.
Šio paleidimo metodo trūkumas, be santykinai mažo paleidimo momento, taip pat yra didelė įsijungimo srovė, nuo penkių iki septynių kartų didesnė už vardinę srovės vertę.
Nepaisant šių trūkumų, variklio užvedimas tiesiogiai prijungus statoriaus apviją prie tinklo yra plačiai naudojamas dėl paprastumo ir gerų voverės narvelio variklio techninių ir ekonominių savybių - mažos kainos ir didelio energetinio naudingumo (η, cos φ1, km, ir tt).
Žemos įtampos paleidimas. Toks paleidimas naudojamas asinchroniniams varikliams su didelės galios voverės narvelio rotoriumi, taip pat vidutinės galios varikliams su nepakankamai galingais elektros tinklais. Įtampos mažinimas gali būti atliekamas šiais būdais:
a) perjungiant statoriaus apviją jungikliu iš įprastos grandinės Δ į paleidimo grandinę Y. Šiuo atveju statoriaus apvijos fazių įtampa sumažėja √3 kartus, dėl to fazių srovės sumažėja √3 kartus ir tiesinės srovės 3 kartus. Pasibaigus variklio užvedimo ir pagreitinimo iki vardinio apsisukimų dažnio procesui, statoriaus apvija vėl perjungiama į įprastą grandinę;
b) įtraukimas į statoriaus apvijos grandinę paleidimo laikotarpiui papildomų aktyviųjų (rezistorių) arba reaktyviųjų (reaktorių) varžų (4.28 pav., a). Tokiu atveju ant nurodytų varžų sukuriami tam tikri įtampos kritimai ΔUadd, kurie yra proporcingi paleidimo srovei, dėl to statoriaus apvijai patenka sumažinta įtampa. Varikliui įsibėgėjant, mažėja rotoriaus apvijoje indukuota EDSE2, taigi, ir paleidimo srovė. Dėl to sumažėja įtampos kritimas ΔUadd esant nurodytoms varžoms, o varikliui tiekiama įtampa automatiškai didėja. Pasibaigus pagreitinimui, papildomi rezistoriai arba reaktoriai trumpai jungiami kontaktoriumi K1;
c) variklio prijungimas prie tinklo per laipsninį autotransformatorių ATP (4.28.6 pav.), kuris paleidimo metu gali turėti keletą pakopų, perjungiamų atitinkama įranga.
Šių užvedimo mažinant įtampą metodų trūkumas yra žymiai sumažėjęs variklio paleidimo ir maksimalus sukimo momentas, kuris yra proporcingas taikomos įtampos kvadratui, todėl juos galima naudoti tik paleidžiant variklius be apkrovos.
Ant pav. Pavyzdžiui, 4.29 parodytos variklio mechaninės charakteristikos esant vardinei ir sumažintai įtampai, t.y. kai statoriaus apvija prijungta pagal Y ir Δ schemas, taip pat srovės I1 ir sukimo momento M grafikai užvedant variklį statoriaus apvijos perjungimas iš Y į Δ. Sujungus pagal Y schemą, maksimalus ir paleidimo momentas sumažėja tris kartus, dėl to variklis negali paleisti mechanizmo apkrovos sukimo momentu Mn.
Asinchroninio variklio paleidimas
Paleidimo metu n=0, t.y. slydimas S=1. Nes srovės rotoriaus ir statoriaus apvijose priklauso nuo slydimo ir didėja jam didėjant, variklio paleidimo srovė yra 5 ÷ 8 kartus didesnė už vardinę srovę
Istart=(5÷8)In.
Kaip aptarta anksčiau, dėl didelio rotoriaus EMF dažnio indukciniai varikliai turi ribotą paleidimo momentą.
Mstart=(0,8÷1,8)Mn.
Norint užvesti variklį, būtina, kad jo sukurtas paleidimo sukimo momentas viršytų veleno apkrovos momentą. Priklausomai nuo maitinimo šaltinių galios ir paleidimo sąlygų, naudojami skirtingi paleidimo būdai, kurių tikslai: sumažinti paleidimo srovę ir padidinti paleidimo momentą.
Yra tokie asinchroninių variklių paleidimo būdai: tiesioginis prijungimas prie grandinės, paleidimas nuo žemos įtampos, reostatinis paleidimas, patobulintų paleidimo savybių variklių naudojimas.
2.11.1. Tiesioginis prisijungimas prie tinklo
Tai lengviausias ir pigiausias būdas pradėti. Variklis vardine įtampa tiekiamas rankiniu būdu arba nuotolinio valdymo pultu. Tiesioginis prisijungimas prie tinklo leidžiamas, jei variklio galia neviršija 5% transformatoriaus galios, jei iš jo maitinamas ir apšvietimo tinklas. Galios apribojimas paaiškinamas srovės šuoliais paleidimo momentu, dėl kurio sumažėja įtampa antrinių transformatoriaus apvijų gnybtuose. Jei apšvietimo tinklas nėra tiekiamas iš transformatoriaus, tada tiesioginis prijungimas prie tinklo gali būti naudojamas varikliams, kurių galia neviršija 25% transformatoriaus galios.
2.11.2. Sumažėjusios įtampos paleidimas
Šis metodas naudojamas paleidžiant galingus variklius, kuriems tiesioginis prisijungimas prie tinklo yra nepriimtinas. Norint sumažinti įtampą, tiekiamą į statoriaus apviją, naudojami droseliai ir automatiniai transformatoriai. Po paleidimo į statoriaus apviją tiekiama tinklo įtampa.
Įtampa sumažinama siekiant sumažinti paleidimo srovę, tačiau tuo pačiu metu, kaip parodyta Fig. 2.17 ir 2.17.b, paleidimo momentas mažėja. Jei įtampa paleidimo metu sumažinama koeficientu, paleidimo momentas sumažės 3 kartus. Todėl šis paleidimo būdas gali būti naudojamas tik tada, kai velenui nėra apkrovos, t.y. tuščiosios eigos režimu.
Jei pagal paso duomenis variklis turi būti prijungtas prie tinklo pagal trikampio schemą, tada norint sumažinti paleidimo srovę paleidimo metu, statoriaus apvija prijungiama pagal žvaigždžių schemą.
Pagrindiniai šio paleidimo būdo trūkumai yra didelė paleidimo įrangos kaina ir neįmanoma užvesti esant apkrovai ant veleno.
Veikiant daugeliui mechanizmų, varomų asinchroniniais varikliais, laikantis technologinių reikalavimų, atsiranda būtinybė reguliuoti šių mechanizmų sukimosi greitį. Asinchroninių variklių sukimosi dažnio (greičio) valdymo metodai atskleidžia santykį:
n=(1-S)n0=(1-S)60f/p.
Iš to išplaukia, kad esant tam tikrai veleno apkrovai, rotoriaus greitį galima reguliuoti:
slydimo keitimas;
stulpų porų skaičiaus pokytis;
keičiant maitinimo dažnį.
2.12.1. Slydimo keitimas
Šis metodas naudojamas varant tuos mechanizmus, kuriuose sumontuoti asinchroniniai varikliai su faziniu rotoriumi. Pavyzdžiui, vairuojant kėlimo ir transportavimo mašinas. Į fazinio rotoriaus grandinę įvedamas reguliavimo reostatas. Rotoriaus aktyviosios varžos padidėjimas neturi įtakos kritinio momento dydžiui, bet padidina kritinį slydimą (2.21 pav.).
Ant pav. 2.21 parodytos asinchroninio variklio su skirtingomis reguliavimo reostato varžomis mechaninės charakteristikos Rp3> Rp2> 0, Rp1=0.
Kaip matyti iš Fig. 2.21 Naudodami šį metodą galite sumažinti didelį greičio valdymo diapazoną. Pagrindiniai šio metodo trūkumai:
Dėl didelių nuostolių ant reguliavimo reostato sumažėja efektyvumas, t.y. neekonomiškas būdas.
Asinchroninio variklio mechaninė charakteristika tampa minkštesnė, padidėjus aktyviajai rotoriaus varžai, t.y. sumažėja variklio stabilumas.
Neįmanoma sklandžiai reguliuoti greičio.
Dėl šių trūkumų šis metodas naudojamas trumpalaikiam sukimosi greičio mažinimui.
Asinchroninių variklių greičio reguliavimas
Iš formulės išplaukia, kad asinchroninio variklio rotoriaus sukimosi greitį galima valdyti šiais būdais: keičiant maitinimo įtampos dažnį f1, polių porų skaičių p ir slydimo dydį s.
Dažnio reguliavimas. Šis metodas leidžia sklandžiai keisti greitį plačiame diapazone. Jai įgyvendinti būtina, kad variklis būtų maitinamas iš atskiro šaltinio (2.18 pav.).
Kaip toks šaltinis, šiuo metu plačiausiai naudojami puslaidininkiniai statiniai dažnio keitikliai.
Priklausomai nuo reikalavimų asinchroninio variklio mechaninėms charakteristikoms reguliuojant dažnį, kartu su dažnio f1 pasikeitimu, pagal tam tikrą dėsnį būtina pakeisti į statoriaus apviją tiekiamą įtampą U1.
Didžiausias variklio sukimo momentas yra apytiksliai (neatsižvelgiant į pasipriešinimą r1) nustatomas pagal (2.40),
![]() .
.
Atsižvelgdami į tai, gauname
Jei, valdant greitį, reikalaujama, kad bet kuriuo dažniu f1 didžiausias sukimo momentas liktų nepakitęs (reguliavimas su), tada gauname
iš kur išplaukia, kad norint reguliuoti n2 ties reikia keisti į statoriaus apviją tiekiamą įtampą U1 proporcingai jos dažniui. Šiuo atveju pagrindinis mašinos magnetinis srautas esant skirtingoms dažnio f1 reikšmėms išlieka nepakitęs, t.y.
![]() (2.56)
(2.56)
Asinchroninio variklio mechaninės charakteristikos reguliuojant Mmax = const parodytos 2.19 pav.
Dažnio reguliavimo trūkumas yra gana didelė keitiklių įrengimo kaina.
Greičio reguliavimas keičiant statoriaus apvijų polių porų skaičių. Norint įgyvendinti šį reglamentą, ant statoriaus bendruose grioveliuose dedamos ne viena, o dvi apvijos
skirtingam aukščiui, taigi ir skirtingam polių porų skaičiui. Priklausomai nuo reikalingo greičio, viena ar kita apvija prijungiama prie tinklo. Šis metodas naudojamas palyginti retai, nes jis turi reikšmingą trūkumą - mažas apvijos vielos naudojimas (veikia tik viena iš apvijų).
Daug dažniau polių porų skaičiaus pokytis pasiekiamas pakeitus (perjungiant) statoriaus apvijos jungimo schemą. Tokio perjungimo principas parodytas 2.20 pav.
Perjungiant nuo nuoseklaus dviejų ritių jungimo prie lygiagrečios, polių porų skaičius pasikeičia nuo 2 iki 1. Jei ant rotoriaus yra fazinė apvija, ją taip pat reikia perjungti kartu su statoriaus apvija, kuri yra didelis trūkumas. Todėl šis greičio reguliavimo būdas naudojamas tik varikliams su voverės narvelio rotoriumi.
Asinchroniniai varikliai, perjungiantys polių porų skaičių, vadinami kelių greičių varikliais. Jie yra dviejų, trijų ir keturių greičių. Yra žinoma daug grandinių, leidžiančių perjungti polių porų skaičių. Šios schemos skirstomos į pastovaus sukimo momento valdymo schemas ir pastovios galios valdymo schemas. Dviejų greičių variklių mechaninės charakteristikos parodytos 2.21 pav.
2.20 pav. Polių porų skaičiaus keitimas perjungiant apvijų ritinius:
a – dvi poros stulpų; b - viena stulpų pora
2.21 pav. Dviejų greičių variklio mechaninės charakteristikos
su polių porų skaičiaus perjungimu santykiu 2:1
esant pastoviam sukimo momentui (a) ir pastoviai galiai (b)
Iš visų būdų, kaip valdyti asinchroninių variklių greitį, polių porų skaičiaus perjungimo būdas yra ekonomiškiausias, nors jis taip pat turi trūkumų:
- varikliai turi palyginti didelius matmenis ir svorį, palyginti su įprastos konstrukcijos varikliais;
– žingsnio greičio valdymas.
Staklėms ir įvairiems mechanizmams varyti naudojami kelių greičių varikliai, kurių sukimosi greitis turi būti reguliuojamas plačiu diapazonu (pavyzdžiui, liftų asinchroniniai varikliai).
Greičio reguliavimas keičiant maitinimo įtampą. Nurodytas reguliavimas gali būti atliekamas naudojant tiristoriaus įtampos reguliatorių PH (2.22 pav.).
Kadangi asinchroninio variklio sukimo momentas yra proporcingas, mechaninės charakteristikos esant žemesnei nei vardinei įtampai bus mažesnės už natūraliąją (2.23 pav.).
Jei pasipriešinimo momentas MC išlieka pastovus, tai, kaip matyti iš 2.23 pav., nukritus įtampai, variklio slydimas
dideja.
Tokiu atveju rotoriaus greitis mažėja.
Tokiu būdu slydimo reguliavimas yra įmanomas viduje
0 < s < sкр.
Tolesnis įtampos sumažėjimas (žemiau U1(2)) yra nepriimtinas, nes šiuo atveju Mmax< MС и двигательостановится.
Variklių greičio reguliavimas keičiant įėjimo įtampą U1 turi reikšmingą trūkumą: tokiu atveju didėja nuostoliai, taigi ir sumažėja variklio efektyvumas. Kai įtampa proporcingai mažėja U1, sumažėja pagrindinis mašinos magnetinis srautas, dėl to, esant M = MС = const, padidėja srovė rotoriaus apvijoje ir atitinkamai elektros nuostoliai rotoriuje. Sumažėja statoriaus plieno magnetiniai nuostoliai. Paprastai, kai variklio apkrovos yra artimos vardinėms, U1 sumažėjimas padidina bendruosius nuostolius ir padidina variklių įkaitimą. Todėl aptariamas greičio reguliavimo būdas daugiausia naudojamas mažos galios mašinoms.
Asinchroninių variklių greičio valdymas įtraukiant papildomą aktyvią varžą į rotoriaus grandinę. Šis valdymo būdas naudojamas tik varikliuose su faziniu rotoriumi. Tai leidžia sklandžiai keisti greitį plačiame diapazone (2.24 pav.). Jo trūkumai: dideli energijos nuostoliai esant papildomoms varžoms, pernelyg „minkštos“ mechaninės variklio charakteristikos su dideliu pasipriešinimu rotoriaus grandinėje. Kai kuriais atvejais pastarasis yra nepriimtinas, nes nedidelis apkrovos sukimo momento pokytis atitinka reikšmingą greičio pokytį. Praktikoje šis metodas daugiausia naudojamas mažų variklių greičiui valdyti, pavyzdžiui, kėlimo įrenginiuose. ![]()
Taikant šį variklio sūkių skaičiaus valdymo būdą, į rotoriaus grandinę įtrauktas reguliavimo reostatas (papildoma aktyvioji varža) turi būti suprojektuotas ilgalaikiam darbui. Todėl paleidimo reostatai, skirti trumpalaikiam srovės tekėjimui paleidimo metu, negali būti naudojami kaip reguliuojantys.
Iš elektros inžinerijos kurso žinoma, kad paleidžiant asinchroninius elektros variklius suvartojama didelė paleidimo srovė iš maitinimo tinklo. Iš tiesų, paleidimo momentu slysta asinchroninis variklis s=1, vardiniu režimu neviršija 0,05. Tai reiškia, kad paleidimo momentu statoriaus besisukantis magnetinis laukas rotoriaus apviją kerta 20 kartų dažniau.
Tačiau pradinė srovė statoriuje ir rotacinės apvijos paprastai neviršija vardinė srovė daugiau nei 7-8 kartus, nes paleidimo metu rotoriaus grandinės indukcinė varža smarkiai padidėja dėl srovės dažnio padidėjimo. Yra žinoma, kad bet kurios grandinės indukcinę reaktyvumą galima nustatyti pagal šią išraišką:
kur L- grandinės induktyvumas.
Paleidimo momentu srovės dažnis rotoriaus apvijoje aukščiau nurodytomis sąlygomis ( s pradėti = 1; s nom = 0,05) yra 20 kartų didesnis nei vardiniame režime. Todėl bendra rotoriaus grandinės varža Z = ?R 2 + x L 2 paleidimo metu yra daug didesnis, palyginti su vardiniu režimu. Tai paaiškina faktą, kad srovė paleidimo metu yra ne 20 kartų didesnė už nominalią vertę, o tik 7-8 kartus.
Pačiam elektros varikliui padidėjusios paleidimo srovės didelio pavojaus nekelia, nes jos teka palyginti trumpą laiką ir nespėja perkaisti apvijų. Tačiau padidėjusios paleidimo srovės lemia didelius įtampos kritimus tiekimo tinkle, o tai neigiamai veikia kitų vartotojų darbą. Tai verčia naudoti daugybę specialių priemonių, kurios riboja asinchroninių variklių paleidimo sroves.
Reikėtų nepamiršti, kad asinchroniniai elektros varikliai, turintys didelę paleidimo srovę, turi palyginti mažą paleidimo momentas, kadangi paleidimo momentu rotacinio lusto galios koeficientas ir yra labai mažas. Asinchroninio elektros variklio sukuriamas sukimo momentas pagal (96) išraišką yra proporcingas ne tik rotoriaus srovei, bet ir rotoriaus grandinės galios koeficientui.
Todėl toliau aptariamos dirbtinės asinchroninių elektros variklių paleidimo grandinės dažnai turi tikslą ne tik sumažinti paleidimo sroves, bet ir padidinti paleidimo momentus.
Variklių paleidimas su faziniu rotoriumi . Asinchroniniai elektros varikliai su faziniu rotoriumi, ty su rotoriumi su slydimo žiedais, paleidžiami į OS naudojant paleidimo reostatą, įtrauktą į rotoriaus grandinę (žr. pav. 40, a ). Reostato įvedimas sumažina paleidimo srovę ir leidžia pasiekti reikiamą paleidimo sukimo momentą iki M Kreta . Išraiška (93)rodo, kad slydimo kiekis s Kreta , kuriai esant atsiranda didžiausias sukimo momentas, priklauso nuo rotoriaus fazės aktyviosios varžos. Todėl pasirinkus atitinkamą šio pasipriešinimo vertę, galima gauti momentą, artimą dydžiui M Kreta (žr. 43 ir 44 pav.).
Patogu apskaičiuoti paleidimo reostatą naudojant grafinį analitinį metodą, kuris turi daug bendro su metodais, kurie anksčiau buvo svarstomi nuolatinės srovės varikliams.
Norint apskaičiuoti paleidimo reostatą, būtina žinoti vardinius elektros variklio duomenis ir turėti jo natūralų mechaninė charakteristika P = f(M): Pastarąjį nesunkiai galima pastatyti, kaip žinia, dviem taškais – pagal sinchroninį greitį esant nuliniam sukimo momentui ir pagal vardinį greitį esant vardiniam (sukimo momentas. Turėdami šiuos duomenis galite paskaičiuoti paleidimo reostatą tokiu būdu.
1. Parenkamos sukimo momento kitimo ribos paleidžiant M m Oi ir M min ir yra pavaizduoti pradinėje diagramoje (47 pav.). Renkantis momentus, reikia vadovautis tuo, kad didžiausias paleidimo momentas turi būti šiek tiek mažesnis už apvertimo momentą, o minimalus – šiek tiek didesnis už statinio pasipriešinimo momentą. M Su , ir kuo mažesnis pasirinktas skirtumas ( M m Oi -M min ), tuo daugiau žingsnių veiks paleidimo reostatas ir tuo sklandžiau bei greičiau užsives variklis.
2. Elektros variklio paleidimas turi prasidėti nuo taško 1 , nes pajudėdamas elektros variklis pagal pirmiau priimtą sąlygą turi veikti akimirką M m Oi adresu n= 0. Todėl pirmoji pradinė charakteristika a, atitinkantis visiškai įjungtą paleidimo reostatą, turi praeiti per taškus P 0 ir 1 . Variklio greitis padidės kaip M m Oi > M c , t.y., yra perteklinis momentas, kuris suteikia mechanizmui pagreitį. Didėjant greičiui, sukimo momentas mažės, o kai pasieks vertę M min (taškas2 ) pirmoji paleidimo reostato pakopa turi būti išjungta.
3. Išjungus pirmąjį etapą, elektros variklis persijungia į darbą iš charakteristikų a už savybę b atitinkantį komplekte esantį paleidimo reostatą be pirmosios pakopos. Pirmojo etapo išjungimo metu elektros variklio greitis praktiškai neturi laiko keistis, todėl galime manyti, kad perėjimas iš vienos charakteristikos į kitą vyksta horizontalia tiesia linija. 2 -3 ir būdingas b eina per taškus P 0 ir 3.
4. Tolesnis elektros variklio pagreitėjimas vyksta jau pagal charakteristiką b kol sukimo momentas vėl nukris iki vertės M min . Tokiu atveju antrasis reostato etapas turi būti išjungtas ir elektros variklis įsijungs pagal charakteristiką. Su. Perėjimas yra horizontalioje linijoje. 4 -5 , o charakteristika c eina per taškus n 0 ir 5 .
5. Kai, dirbant su charakteristika, momentas vėl sumažėja iki vertės M min , trečia paskutinė paleidimo reostato pakopa išjungiama ir elektros variklis įsijungia dirbti pagal natūralią charakteristiką d. Pagal šią charakteristiką elektros variklio pagreitis tęsiasi tol, kol jo sukimo momentas tampa lygus statinio pasipriešinimo momentui. Po to pagreitis sustos ir variklis dirbs pastoviu greičiu.
Pažymėtina, kad nagrinėjamu atveju paleidimo reostato pakopų skaičius yra iš anksto pasirinktas. Todėl akimirkos M m Oi ir M min turi būti parinktas taip, kad išjungus trečią pakopą elektros variklis persijungtų į natūralią charakteristiką d. Jei taip neatsitiks, reikia šiek tiek pakeisti momentų reikšmes M maks ir M min ir pakartokite statybą. Tuo atveju, kai žingsnių skaičius neribojamas, statyba atliekama tol, kol įvyks perėjimas prie natūralios charakteristikos. Reostato žingsnių skaičius šiuo atveju nustatomas pagal paleidimo diagramą.
6. Naudojant paleidimo diagramą (žr. 47 pav.), nesunku nustatyti tiek viso reostato, tiek atskirų jo žingsnių varžą. Nesunku įrodyti, kad segmentas 7 -9 varžų skalėje rodo aktyviąją rotoriaus apvijos fazės varžą ir segmentą 1 - 7 toje pačioje skalėje - paleidimo reostato fazės bendra aktyvioji varža. Segmentai 1 -3 , 3 -5 ir 5 -7 atitinkamai reiškia pirmojo, antrojo ir trečiojo paleidimo reostato pakopų aktyviųjų varžų vertes.
Atsparumo skalę galima nustatyti pagal išraišką
kur 7 -9 - segmentas diagramoje ilgio vienetais;
R 2 - vienos rotoriaus fazės aktyvioji varža, kurią galima paimti iš elektros variklio vardinės lentelės duomenų arba nustatyti išmatuojant arba apytiksliai apskaičiuojant pagal formulę
kur s- vardinis slydimas;
t 2 - rotoriaus fazių skaičius;
aš 2 - nominali srovė rotoriaus fazėje;
M- vardinis sukimo momentas.
Apsvarstytas asinchroninių elektros variklių su faziniu rotoriumi paleidimo būdas yra paprastas ir patikimas. Tai leidžia sumažinti paleidimo srovę ir, jei reikia, padidinti paleidimo momentą iki apvertimo momento. Šio metodo trūkumu reikėtų laikyti didelius energijos nuostolius pradiniuose reostatuose, taip pat didelius pastarųjų matmenis su daugybe žingsnių. Kad būtų išvengta pernelyg didelių paleidimo reostatų naudojimo, krano grandinėse dažnai naudojami reostatai su vadinamąja asimetrine grandine, kai varža išvedama ne vienu metu iš trijų rotoriaus grandinės fazių, o palaipsniui.
Pradiniu paleidimo momentu visa varža įvedama į elektros variklio rotoriaus grandinę. Tada pamažu, elektros varikliui įsibėgėjant, būgno arba kumštelio valdiklio pagalba iš pirmosios fazės grandinės pašalinama pirmoji varžos pakopa, vėliau – antroji, po to – trečioji; kitoje reguliatoriaus padėtyje antroji varžos pakopa pašalinama iš pirmosios fazės grandinės ir taip toliau, kol paskutinėje valdiklio padėtyje pašalinama visa varža ir trumpai sujungiama rotoriaus grandinė.
Šis užvedimo būdas sukuria tam tikrą rotoriaus grandinės srovių asimetriją, tačiau tai nekelia pavojaus elektros varikliui ir tuo pačiu leidžia šiek tiek sumažinti paleidimo reostatų ir valdiklių matmenis.
Elektrinių variklių paleidimas su voverės narvelio rotoriumi.
Galingų asinchroninių elektros variklių su voverės narvelio rotoriumi paleidimas yra susijęs su daugybe sunkumų, nes paleidimo srovių ribojimas įvedant papildomas varžas. šiuo atveju negalima naudoti rotoriaus grandinės. Paprastai kėlimo ir transportavimo mašinose naudojami elektriniai varikliai su santykinai mažos galios rotoriumi, todėl paprastai nereikia riboti paleidimo srovių.
Kai voverės narvelio asinchroninis variklis maitinamas iš tinklo, daugeliu atvejų paleidimas atliekamas prijungus statoriaus apviją prie visos tinklo įtampos, kaip parodyta pav. 48, a.
Jei elektros variklio galia yra proporcinga tinklo galiai, paleidimo srovės sukelia neleistinai didelius įtampos kritimus, o tai pablogina kitų vartotojų, maitinamų tuo pačiu tinklu, darbo sąlygas; šiuo atveju būtina imtis priemonių paleidimo srovėms apriboti.
Paleidžiant tiesioginiu perjungimu į pilną įtampą, statoriaus apvija prijungiama prie tinklo tiesiog įjungiant atitinkamą įrenginį – peiliinį jungiklį, kontaktorių, magnetinį starterį ir pan.. Tokiu atveju atsiranda paleidimo srovės viršįtampis, kuris yra 7 -8 kartus didesnė už vardinę elektros variklio srovę. Reikia turėti omenyje, kad srovės viršįtampis paleidimo momentu priklauso ne nuo apkrovos, o nuo variklio apvijų varžos vertės ir tinklo įtampos. Atsižvelgiant į tai, jei reikia sumažinti paleidimo sroves, paleidimo metu į elektros variklį tiekiama sumažinta įtampa.
Įtampą, tiekiamą į statoriaus apviją, galima sumažinti:
a) statoriaus apvijos perjungimas iš žvaigždės į trikampį;
b) aktyviosios varžos, įtrauktos į statoriaus grandinę, pagalba;
c) naudojant autotransformatorių.
Bendra visiems šiems metodams yra sumažinti variklio paleidimo srovę, tuo pačiu sumažinant jo paleidimo momentą, kuris, kaip žinote, yra proporcingas įtampos kvadratui. Tai reiškia, kad nagrinėjamas paleidimo būdas taikomas tik esant mažiems pasipriešinimo momentams.
Pradedant perjungti statoriaus apviją iš žvaigždės į trikampį, dažniausiai naudojama asinchroniniams elektros varikliams su voverės narvelio rotoriumi, kuriuose normaliai veikiant statoriaus apvija jungiama trikampiu. Grandinės veikimo principas (48 pav., b) susideda iš to, kad pradiniu paleidimo laikotarpiu statoriaus apvija įjungiama žvaigždute ir prijungiama prie tinklo. Kai elektros variklis išvysto tam tikrą greitį, apvija perjungiama į trikampį. Akivaizdu, kad paleidimo srovės vertė prijungus su žvaigžde yra 3 kartus mažesnė nei prijungus trikampiu, nes įtampa, tiekiama kiekvienai elektros variklio fazei, pirmuoju atveju yra 3 kartus mažesnė, palyginti su antrasis atvejis. Tiesa, pradinis sukimo momentas bus tris kartus mažesnis. Kaip parodyta pav. 48, b, norint tokiu būdu paleisti elektros variklį, nereikia jokios sudėtingos įrangos. Elektros variklio paleidimas atliekamas įprastu trijų polių jungikliu R.
Palyginti retai naudojamas neekonomiškas paleidimo būdas, naudojant aktyviąją varžą, įtrauktą į statoriaus apvijos grandinę. Šis paleidimo būdas naudojamas tik tais atvejais, kai elektros variklio statoriaus apvija normaliai veikiant turi būti įjungta žvaigždute. Paleidžiant pirmiausia užsidaro jungiklis R 1 (48 pav., in). Šiuo atveju statoriaus apvija prijungiama prie tinklo per reostatą R. Kai elektros variklis sukuria tam tikrą apsisukimų skaičių, peilio jungiklis užsidaro R 2 ir reostatas yra manevruojamas.
Gana retai naudojamas ir asinchroninių elektros variklių paleidimas naudojant autotransformatorių. Tokiu atveju per pirmąjį paleidimo laikotarpį šešių polių jungiklis P(48 pav., G) yra įdėtas į vietą 1 ir į statoriaus gnybtus per autotransformatorių T taikoma per maža įtampa. Kai elektros variklis įsibėgėja, jungiklis pastatomas į padėtį 2 o statoriuje yra visa tinklo įtampa.
Bendras visų svarstomų asinchroninių elektros variklių su voverės narvelio rotoriumi paleidimo būdų trūkumas žemos įtampos yra žymiai sumažintas paleidimo momentas.
Norint apriboti paleidimo srovę, tuo pat metu nemažinant paleidimo momento, paleidimo metu būtina padidinti rotoriaus apvijos varžą. Tam ant rotoriaus dedamos ne viena, o dvi trumpojo jungimo apvijos (dviejų elementų elektros varikliai) arba daromi rotoriai su vadinamuoju giliu grioveliu.
Dviejų elementų asinchroniniai varikliai ir varikliai su giliais plyšiais turi didelį paleidimo momentą ir mažesnį paleidimo srovės santykį nei varikliai su voverės narveliaisĮprastas vykdymas, tačiau pirmųjų kaina yra daug didesnė ir jie naudojami palyginti retai.