Variklio mechaninė charakteristika vadinama rotoriaus apsisukimų dažnio priklausomybe nuo veleno sukimo momento n = f (M2). Kadangi esant apkrovai tuščiosios eigos sukimo momentas yra mažas, tada M2 ≈ M ir mechaninė charakteristika pavaizduota priklausomybe n = f (M). Jeigu atsižvelgsime į ryšį s = (n1 - n) / n1, tai mechaninę charakteristiką galima gauti pateikus grafinę jos priklausomybę koordinatėse n ir M (1 pav.).
Ryžiai. 1. Asinchroninio variklio mechaninė charakteristika
Natūrali mechaninė indukcinio variklio charakteristika atitinka pagrindinę (paso) jos įtraukimo grandinę ir vardinius maitinimo įtampos parametrus. Dirbtinės savybės gaunami, jei yra papildomi elementai: rezistoriai, reaktoriai, kondensatoriai. Kai variklis veikia vardinė įtampa charakteristikos taip pat skiriasi nuo natūralios mechaninės charakteristikos.
Mechaninės charakteristikos yra labai patogus ir naudingas įrankis analizuojant elektros pavaros statinius ir dinaminius režimus.
Pagrindiniai mechaninių charakteristikų taškai: kritinis slydimas ir dažnis, maksimalus sukimo momentas, paleidimo momentas, vardinis sukimo momentas.
Mechaninė charakteristika yra sukimo momento priklausomybė nuo slydimo arba, kitaip tariant, nuo apsisukimų skaičiaus:
![]()
Iš išraiškos  matyti, kad ši priklausomybė yra labai sudėtinga, nes, kaip rodo formulės)
matyti, kad ši priklausomybė yra labai sudėtinga, nes, kaip rodo formulės)  ir
ir  , slydimas taip pat įtrauktas į išraiškas aš 2
ir cos? 2. Indukcinio variklio mechaninė charakteristika dažniausiai pateikiama grafiškai.
, slydimas taip pat įtrauktas į išraiškas aš 2
ir cos? 2. Indukcinio variklio mechaninė charakteristika dažniausiai pateikiama grafiškai.
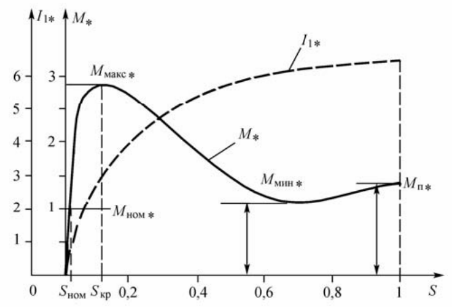
Charakteristikos pradžios taškas atitinka n= 0 ir s= 1: tai yra pirmasis variklio užvedimo momentas. Pradinis sukimo momentas M n - labai svarbi variklio eksploatacinių savybių charakteristika. Jeigu M n yra mažas, mažesnis už vardinį darbinį sukimo momentą, variklį galima užvesti tik tuščiąja eiga arba atitinkamai sumažinus mechaninę apkrovą.
Pažymėkite simboliu Mnp priešpriešinis (stabdymo) momentas, atsirandantis dėl mechaninės veleno apkrovos, kuriuo užvedamas variklis. Akivaizdi sąlyga norint užvesti variklį yra: M n > Mnp . Jei ši sąlyga bus įvykdyta, variklio rotorius pradės judėti, apsisukimų skaičius n padidės, ir slydimas s mažinti. Kaip matote iš aukščiau esančio paveikslėlio, variklio sukimo momentas didėja nuo M n iki maksimumo M m atitinkantis kritinį slydimą s kp, todėl išauga ir turimos variklio galios perteklius, nulemtas sukimo momentų skirtumo M ir Mnp .
Kuo didesnis skirtumas tarp turimo variklio sukimo momento (galima esant tam tikram veikimo kreivės slydimui) M ir prieštaraujantys M np , tuo lengvesnis užvedimo režimas ir tuo greičiau variklis pasiekia pastovų sukimosi greitį.
Kaip rodo mechaninė charakteristika, esant tam tikram apsisukimų skaičiui (at s = s kp) turimas variklio sukimo momentas pasiekia didžiausią galimą šis variklis(esant tam tikrai įtampai U ) vertybes M t . Be to, variklis ir toliau didina sukimosi greitį, tačiau turimas sukimo momentas greitai mažėja. Dėl kai kurių vertybių n ir s variklio sukimo momentas tampa lygus priešingam: variklio užvedimas baigiasi, jo apsisukimų skaičius nustatomas į vertę, atitinkančią santykį:
![]()
Šis santykis yra privalomas visiems variklio apkrovos režimams, tai yra visoms vertėms Mnp , neviršijant didžiausio galimo variklio sukimo momento M t . Šiose ribose pats variklis automatiškai prisitaiko prie visų apkrovos svyravimų: jei variklio veikimo metu padidėja jo mechaninė apkrova, akimirką M np bus didesnis variklio sukurtas sukimo momentas. Variklio greitis pradės mažėti, o sukimo momentas padidės.
Sukimosi greitis bus nustatytas naujame lygyje, atitinkančiame lygybę M ir Mnp . Kai apkrova sumažėja, perėjimo į naują apkrovos režimą procesas bus atvirkštinis.
Jei apkrovos momentas Mnp viršys M t , variklis iš karto sustos, nes toliau mažėjant greičiui mažėja variklio sukimo momentas.
Todėl didžiausias variklio sukimo momentas M t taip pat vadinamas apvertimu arba kritiniu momentu.
Jei momento formulėje ![]() pakaitalas:
pakaitalas:
tada gauname:
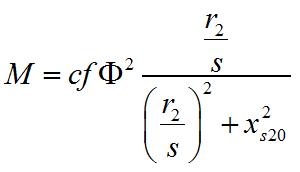
Imant pirmąjį išvestinį iš M ir prilygindami jį nuliui, nustatome, kad didžiausia sukimo momento vertė atsiranda esant sąlygai:
tai yra su tokiu slydimu s = s kp , kuriai esant aktyvioji rotoriaus varža lygi indukcinei varžai
![]()
Vertybės s kp dauguma indukcinių variklių yra 10–25% diapazone.
Jei aukščiau parašyta momento formulėje, vietoj aktyvus pasipriešinimas r 2 pakeiskite indukcinį pagal formulę
![]()
Didžiausias indukcinio variklio sukimo momentas yra proporcingas magnetinio srauto kvadratui (taigi ir įtampos kvadratui) ir atvirkščiai proporcingas rotoriaus apvijos nuotėkio induktyvumui.
Esant pastoviai varikliui tiekiamai įtampai, jo srautas F išlieka beveik nepakitęs.
Rotoriaus grandinės nuotėkio induktyvumas taip pat praktiškai pastovus. Todėl, kai rotoriaus grandinėje pasikeičia aktyvioji varža, didžiausia sukimo momento vertė M t nepasikeis, bet atsiras esant skirtingiems slydimams (padidėjus aktyviajam rotoriaus pasipriešinimui – esant didelėms slydimo reikšmėms).
Akivaizdu, kad maksimalią galimą variklio apkrovą lemia jo vertė M t . Darbinė variklio charakteristikos dalis yra siaurame apsisukimų diapazone nuo n atitinkamas M t , prieš. At n = n 1 (būdingas pabaigos taškas) M = 0, nes esant sinchroniniam rotoriaus greičiui s = 0 ir aš 2 = 0.
Vardinis sukimo momentas, kuris lemia vardinės variklio galios vertę, paprastai yra lygus 0,4–0,6 M t . Taigi asinchroniniai varikliai leidžia trumpalaikes perkrovas 2 - 2,5 karto.
Pagrindinis parametras, apibūdinantis asinchroninio variklio veikimo režimą, yra slydimas s - santykinis skirtumas tarp variklio rotoriaus sukimosi dažnio n ir jo lauko n o: s = (n o - n) / n o .
Mechaninės charakteristikos plotas, atitinkantis 0 ≤ s ≤ 1, yra variklio režimų plotas, o esant s< s кр работа двигателя устойчива, при s >s cr – nestabilus. Dėl s< 0 и s >1 variklio sukimo momentas nukreiptas prieš jo rotoriaus sukimosi kryptį (atitinkamai regeneracinis stabdymas ir atbulinės srovės stabdymas).
Stabili variklio mechaninės charakteristikos atkarpa dažnai apibūdinama Kloso formule, pakeičiant vardinio režimo parametrus, į kuriuos galima nustatyti kritinį slydimą s cr:
 ,
,
čia: λ = M kp / M n - variklio perkrovos galia.
Mechaninė charakteristika pagal žinyno ar katalogo duomenis gali būti sudaryta maždaug iš keturių taškų (7.1 pav.):
1 punktas – tobula tuščiąja eiga, n \u003d n o \u003d 60 f / p, M \u003d 0, kur: p yra polių porų skaičius magnetinis laukas variklis;
2 taškas – vardinis, režimas: n = n n, M = M n = 9550 P n / n n, kur P n - vardinė galia variklis kW;
3 taškas – kritinis režimas: n = n cr, M = M cr =λ M n;
4 taškas – paleidimo režimas: n = 0, M = M start = β M n.
Analizuojant variklio darbą apkrovų diapazone iki M n ir šiek tiek daugiau, stabilią mechaninės charakteristikos atkarpą galima apytiksliai apibūdinti tiesės lygtimi n = n 0 - vM, kur koeficientas „v“ nesunkiai nustatomas į lygtį pakeičiant vardinio režimo n n ir M n parametrus.
Statoriaus apvijų konstrukcija. Vieno sluoksnio ir dvisluoksnės kilpos apvijos.
Pagal ritių konstrukciją apvijos skirstomos į laisvus ritinius su minkštais ritėmis ir apvijas su kietomis arba pusritėmis. Minkštos ritės yra pagamintos iš apvalios izoliuotos vielos. Norint suteikti reikiamą formą, jie iš anksto suvyniojami ant šablonų ir dedami į izoliuotus trapecijos griovelius (žr. 3.4 pav., in, G ir 3,5, in); apvijų klojimo metu įrengiamos fazinės izoliacinės tarpinės. Tada ritės grioveliuose sutvirtinamos pleištų ar dangčių pagalba, suteikiama galutinė forma (formuojamos priekinės dalys), apvija tvarstoma ir impregnuojama. Visas palaidų apvijų gamybos procesas gali būti visiškai mechanizuotas.
Standžios ritės (pusinės ritės) yra pagamintos iš stačiakampio izoliuoto laido. Prieš klojant į griovelius, jiems suteikiama galutinė forma; tuo pačiu metu jiems taikoma korpuso ir fazės izoliacija. Tada ritės dedamos į iš anksto izoliuotus atvirus arba pusiau atvirus griovelius. , sustiprinti ir impregnuoti.
1. Vieno sluoksnio apvijos- labiausiai tinka mechanizuotam klojimui, nes tokiu atveju apvija turi būti koncentriška ir vienu metu tilpti į statoriaus angas abiejose ritės pusėse. Tačiau jų naudojimas padidina apvijos vielos suvartojimą dėl didelio priekinių dalių ilgio. Be to, tokiose apvijose neįmanoma sutrumpinti žingsnio, dėl ko pablogėja oro tarpo magnetinio lauko forma, padidėja papildomi nuostoliai ir nukrenta. mechaninė charakteristika ir padidėjęs triukšmas. Tačiau dėl savo paprastumo ir mažos kainos tokios apvijos yra plačiai naudojamos asinchroniniai varikliai maža galia iki 10-15 kW.
2. Dvisluoksnės apvijos- leidžia sutrumpinti apvijos žingsnį bet kokiu dantų padalijimų skaičiumi, o tai pagerina apvijos sukuriamo magnetinio lauko formą ir slopina aukštesnes harmonikas EML kreivėje. Be to, naudojant dvisluoksnes apvijas, gaunama paprastesnė galinių jungčių forma, kuri supaprastina apvijų gamybą. Tokios apvijos naudojamos didesnės nei 100 kW galios varikliams su standžiais ritėmis, klojamais rankomis.
Statoriaus apvijos. Vieno ir dviejų sluoksnių bangų apvijos
Statoriaus šerdies grioveliuose dedama daugiafazė apvija, kuri prijungiama prie tinklo kintamoji srovė. Daugiafazės simetriškos apvijos su fazių skaičiumi tįtraukti t fazinės apvijos, kurios yra sujungtos žvaigždute arba daugiakampiu. Taigi, pavyzdžiui, byloje trifazė apvija statoriaus fazių skaičius t = 3, o apvijas galima sujungti žvaigždute arba trikampiu. Fazinės apvijos tarpusavyje pasislenka 360 / t kruša; trifazei apvijai šis kampas yra 120°.
Fazinės apvijos gaminamos iš atskirų ritinių, sujungtų nuosekliai, lygiagrečiai arba nuosekliai lygiagrečiai. Šiuo atveju pagal ritė keli statoriaus apvijos apsisukimai yra sujungti nuosekliai, dedami į tuos pačius griovelius ir turi bendrą izoliaciją griovelio sienelių atžvilgiu. Savo ruožtu ritė nagrinėjami du aktyvūs (t. y. esantys pačioje statoriaus šerdyje) laidininkai, nutiesti į du griovelius po gretimais priešingais poliais ir sujungti vienas su kitu nuosekliai. Laidai, esantys už statoriaus šerdies ir jungiantys aktyvius laidininkus vienas su kitu, vadinami priekinėmis apvijos dalimis. Apvijų ričių tiesios dalys, išklotos grioveliuose, vadinamos ričių šonais arba griovelio dalimis.
Statoriaus grioveliai, kuriuose telpa apvijos, sudaro vadinamuosius dantis statoriaus vidinėje pusėje. Atstumas tarp dviejų gretimų statoriaus šerdies dantų centrų, matuojamas išilgai jo paviršiaus, nukreipto į oro tarpą, vadinamas dantų padalijimas arba griovelių padalijimas.
Daugiasluoksnės cilindrinės ritės apvijos (3 pav.) yra suvyniotos iš apvalios vielos ir susideda iš daugiasluoksnių diskinių ritinių, esančių išilgai strypo. Tarp gyvatukų (per kiekvieną ritę arba per dvi ar tris rites) galima palikti radialinius aušinimo kanalus. Tokios apvijos naudojamos aukštesnės įtampos pusėje ties S st ≤ 335 kV×A, aš st ≤ 45 A ir U l.n ≤ 35 kV.
Vieno sluoksnio ir dvisluoksnės cilindrinės apvijos (4 pav.) yra apvyniotos iš vieno ar daugiau (iki keturių) lygiagrečių stačiakampių laidininkų ir naudojamos S st ≤ 200 kV×A, aš st ≤ 800 A ir U l.n ≤ 6 kV.
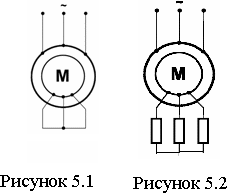
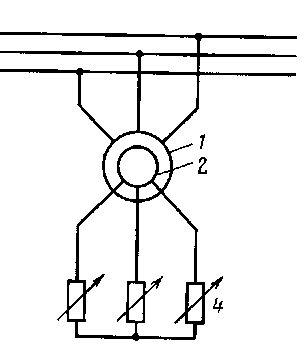
Asinchroninis voverės narvelinis variklis (5.1 pav.) ir IM su faziniu rotoriumi (5.2 pav.) plačiai naudojami elektrinėje pavaroje dėl didelio veikimo laiko, didelio našumo, gerų valdymo savybių.
5.3 paveiksle parodyta elektros variklio vienos fazės ekvivalentinė grandinė, atsižvelgiant į įmagnetinimo grandinės su aktyvia parametrus r m ir indukcinis x m pasipriešinimai.
Pakeitimo grandinėje:
r 1 - statoriaus apvijos fazės aktyvioji varža;
r 2 ′ - į statorių nukreiptos rotoriaus apvijos fazės aktyvioji varža;
x 1 - statoriaus apvijos fazės indukcinė varža;
x 2 ′ - sumažintas iki rotoriaus apvijos fazės statoriaus indukcinės varžos;
x m- įmagnetinimo grandinės indukcinė varža.
Pagal lygiavertę grandinę, rotoriaus srovė aš 2 ' turi prasmę
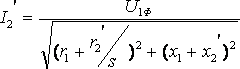
Iš (5.1) išplaukia, kad rotoriaus srovė aš 2 ’ priklauso nuo slydimo s, t.y. dėl mašinos rotoriaus greičio, nes
Atkreipkite dėmesį, kad paleidimo metu slydimas s = 1(dabartinė greičio vertė w = 0), ir sukimosi dažniu w=w 0 idealus tuščiosios eigos slydimas yra lygus s = 0. Iš santykio taip pat išplaukia, kad paleidimo metu rotoriaus srovė pasiekia didžiausią vertę aš 2k ’ @ (8¸10)I nom ir turėtų būti ribojamas.
Rotoriaus srovės dažnis f p dažnio verte f c tinklo įtampa f p = f c ×s, todėl pradedant s = 1 o asinchroninę mašiną galima pavaizduoti įtampos transformatoriumi, nes f p =f c =50 Hz. Varikliui įsibėgėjant ir veikiant vardiniu slydimu s n, kuris neviršija s n 0,1 ; krenta ir rotoriaus srovės dažnis f p = 1...5Hz.
Galia R 1 , kurį AD suvartoja iš tinklo, išleidžiama magnetizacijos grandinės nuostoliams padengti ∆Р m ir statoriaus apvijoje ∆Р 1 , likusi jo dalis paverčiama elektromagnetine galia R E , kuri yra lygi
![]()
Savo ruožtu, , ir, spręsdami kartu ir suraskite elektromagnetinio momento vertę
 .
.
Priklausomybė (5.4) yra IV mechaninės charakteristikos aprašymas ir yra sudėtinga IV momento priklausomybė nuo slydimo. Išnagrinėjame jį dėl ekstremumo, paimdami išvestinę ir prilygindami ją nuliui:
Priklausomybė turi didžiausią vertę esant kritinei slydimo vertei, lygiai
ir kritinis (maksimalus) momentas
Atkreipkite dėmesį, kad ženklas (+) reiškia variklio režimą, o ženklas (-) – mašinos generatoriaus režimą.
Praktiniams skaičiavimams patogiau naudoti Kloso formulę, gautą iš išraiškų
 , kur.
, kur.
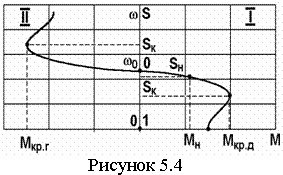
Didelėse asinchroninėse mašinose r 1 << r 2 ’ , ir ε ≈0. IM mechaninė charakteristika yra tokia, kaip parodyta 2.4 paveiksle. Būdingi charakteristikos taškai:
1- s = 0; M = 0, o variklio greitis lygus sinchroniniam;
2- s=s nom , M=M nom- vardinis
variklio darbo režimas;
3- s = s į , M = M kr.D- didžiausias sukimo momentas variklio režimu;
4- s = 1, M = M P- inicialus Pradinis sukimo momentas;
5- s=-s į , M = M kr.G- maksimalus sukimo momentas generatoriaus režimu.
Analizuojant maitinimo įtampos įtaka U apie mechanines elektros variklio charakteristikas, remdamiesi (5.6) ir (5.7) santykiais, turime, kad kritinis slydimas s į išlieka pastovus, kai įtampa mažėja, o kritinis momentas M kr.d mažėja proporcingai maitinimo įtampos kvadratui (5.5 pav.).
Kai tinklo įtampa nukrenta iki vertės 0,9 × U nom, t.y. 10% nuolaida U nom, kritinis momentas M kr.d sumažėja 19 proc. Sumažėjus maitinimo įtampai, norint sukurti ankstesnę sukimo momento vertę, variklis turi veikti didelėmis rotoriaus srovėmis. 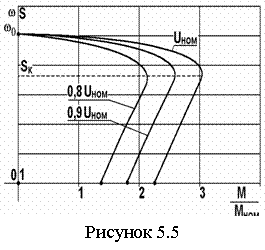
Projektuodami elektros variklį įsitikinkite, kad pradinė vertė ( s = 1) ir kritiniais momentais ( s = s į) esant žemesnei įmanomai įtampai, atitinka darbo mašinos reikalavimus.
Analizuojant aktyvaus pasipriešinimo įtaka, įvestas į rotoriaus grandinę, remiantis santykiais (5.5) - (5.6), kurie padidėjus rotoriaus 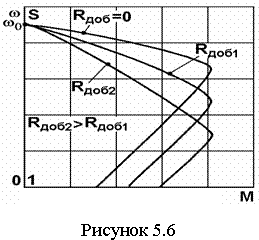
pasipriešinimas, kuris tampa lygus ( r 2 ’ + R ext), didėja kritinis slydimas S į, bet variklio kritinio momento reikšmė M kr.d lieka nepakitęs.
Mechaninės charakteristikos parodytos 12 paveiksle. Metodas naudojamas mašinai paleisti, kai paleidimo metu į rotoriaus grandinę įtraukiama reikšminga vertė. R ext . Paleidimo schema yra panaši į nepriklausomai sužadinto nuolatinės srovės variklio. Apskaičiuoti dirbtines mechanines charakteristikas įvedant atsparumą R ext santykis naudojamas sukamojoje grandinėje
![]()
kur s ir ir s e- slydimas atitinkamai ant dirbtinių ir natūralių savybių.
Žinant dydį R ext, įvestas į rotoriaus grandinę, toms pačioms momento reikšmėms pagal santykį (5.8) apskaičiuojami slydimai s ir dėl dirbtinių savybių.
Aktyvių – indukcinių varžų įvedimas mašinos rotoriaus grandinėje (14 pav.) naudojamas didesniam mašinos paleidimo momento pastovumui palaikyti, palyginti su natūralia mašinos charakteristika – mašinos mechanine charakteristika slydimo metu. plotas 1
Kritinis mašinos momentas M kr.d ir kritinis slydimas s į
mašinos keičiasi pagal santykius. Aktyviosios ir indukcinės varžos įvedimas į mašinos statoriaus grandinę (pav.) naudojamas mašinos įsijungimo srovei sumažinti, nes įtampa tiesiai statoriaus gnybtuose tampa srovės funkcija, o paleidimo srovei mažėjant (pagreitis). ), nurodyta įtampa auga ir atsistato iki vertės, artimos U nom .
Aktyvių ir indukcinių varžų išvestis iš mašinos statoriaus grandinės atliekama relė - kontaktorius arba bekontaktė grandinė. 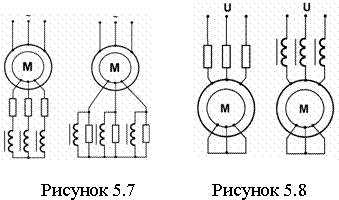
Asinchroniniai varikliai (IM) yra labiausiai paplitęs variklių tipas, nes Jie yra paprastesni ir patikimesni, su vienoda galia turi mažesnį svorį, matmenis ir kainą, palyginti su DPT. Kraujo spaudimo įjungimo diagramos parodytos fig. 2.14.
Dar visai neseniai IM su voverės narvelio rotoriumi buvo naudojamas nereguliuojamose elektrinėse pavarose. Tačiau atsiradus tiristoriniams dažnio keitikliams (TFC), tiekiant įtampą IM statoriaus apvijose, valdomose elektrinėse pavarose pradėti naudoti varikliai su voverės narveliais. Šiuo metu dažnio keitikliuose naudojami galios tranzistoriai ir programuojami valdikliai. Greičio valdymo metodas vadinamas impulsiniu ir jo tobulinimas yra svarbiausia elektros pavaros plėtros kryptis.
Ryžiai. 2.14. a) IM perjungimo grandinė su voverės narvelio rotoriumi;
b) IM perjungimo grandinė su faziniu rotoriumi.
IM mechaninės charakteristikos lygtis gali būti gauta remiantis lygiaverte IM grandine. Jei nepaisysime aktyviosios statoriaus varžos šioje grandinėje, tada mechaninės charakteristikos išraiška atrodys taip:
![]() ,
,
Čia M iki - kritinis momentas; S į- jį atitinkantį kritinį slydimą; U f- tinklo fazinės įtampos efektyvioji vertė; ω 0 =2πf/p yra IM besisukančio magnetinio lauko kampinis greitis (sinchroninis greitis); f– maitinimo įtampos dažnis; p- kraujospūdžio polių porų skaičius; x k- trumpojo jungimo indukcinė fazinė varža (nustatoma pagal ekvivalentinę grandinę); S \u003d (ω 0 -ω) / ω 0- slydimas (rotoriaus greitis, palyginti su besisukančio lauko greičiu); R21 yra bendra rotoriaus fazės aktyvioji varža.
IM su voverės narvelio rotoriumi mechaninė charakteristika parodyta fig. 2.15.
Ryžiai. 2.15. IM su voverės narvelio rotoriumi mechaninės charakteristikos.
Ant jo galima išskirti tris būdingus taškus. Pirmojo taško koordinatės ( S = 0; ω=ω 0; M = 0). Tai atitinka idealų tuščiosios eigos režimą, kai rotoriaus greitis yra lygus besisukančio magnetinio lauko greičiui. Antrojo taško koordinatės ( S=S į; M=M iki). Variklis dirba maksimaliu sukimo momentu. At M c > M k variklio rotorius bus priverstinai sustabdytas, o tai yra variklio trumpojo jungimo režimas. Todėl variklio sukimo momentas šiuo metu vadinamas kritiniu. M iki. Trečiojo taško koordinatės ( S = 1; ω = 0; M=M p). Šiuo metu variklis dirba paleidimo režimu: rotoriaus greitis ω=0 ir paleidimo momentas veikia nejudantį rotorių M p. Mechaninės charakteristikos atkarpa, esanti tarp pirmojo ir antrojo charakteristikų taškų, vadinama darbo dalimi. Ant jo variklis dirba pastoviai. IM su voverės narvelio rotoriu tokiomis sąlygomis U = U n ir f = f n mechaninė charakteristika vadinama natūralia. Tokiu atveju charakteristikos darbinėje dalyje yra taškas, atitinkantis vardinį variklio veikimo režimą ir turintis koordinates ( S n; ω n; M n).
Elektromechaninė kraujospūdžio charakteristika ω=f(I f), kuri 2.15 pav. pavaizduota punktyrine linija, priešingai nei DPT elektromechaninė charakteristika, su mechanine charakteristika sutampa tik savo darbinėje srityje. Taip yra dėl to, kad paleidimo metu dėl kintančio emf dažnio. rotoriaus apvijoje E 2 keičiasi srovės dažnis ir apvijos indukcinių ir aktyviųjų varžų santykis: paleidimo pradžioje srovės dažnis yra didelis, o indukcinė varža didesnė už aktyviąją; didėjant rotoriaus greičiui ω rotoriaus srovės dažnis, taigi ir jo apvijos indukcinė varža, mažėja. Todėl IM paleidimo srovė tiesioginio paleidimo režimu yra 5÷7 kartus didesnė už vardinę vertę aš fn, ir paleidimo momentą M p lygus vardiniam M n. Skirtingai nuo DCT, kur paleidimo metu reikia apriboti paleidimo srovę ir paleidimo momentą, paleidžiant IM, paleidimo srovė turi būti ribojama, o paleidimo momentas turi būti padidintas. Paskutinė aplinkybė yra pati svarbiausia, nes DPT su nepriklausomu sužadinimu prasideda nuo M s<2,5М н , DCT su nuosekliu sužadinimu ties M s<5М н , ir kraujospūdį dirbant su natūralia charakteristika prie M s<М н .
IM su voverės narvelio rotoriumi padidinimas M p suteikia speciali rotoriaus apvijos konstrukcija. Rotoriaus apvijos griovelis padarytas giliai, o pati apvija dedama dviem sluoksniais. Užvedus variklį, dažnis E 2 o rotoriaus srovės didelės, dėl to atsiranda srovės poslinkio efektas – srovė teka tik viršutiniame apvijos sluoksnyje. Todėl padidėja apvijos varža ir variklio paleidimo momentas. M P. Jo vertė gali siekti 1,5 mln.
IM su faziniu rotoriumi padidinimas M P teikiama keičiant jo mechanines charakteristikas. Jei pasipriešinimas R P, įtrauktas į rotoriaus srovės grandinę, yra lygus nuliui - variklis veikia pagal natūralią charakteristiką ir M P \u003d M N. At R P >0 didėja rotoriaus fazės bendra aktyvioji varža R21. Kritinis slydimas S į kaip jūs didinate R21 taip pat didėja. Dėl to IM su faziniu rotoriumi įvedimas R Pį grandinę rotoriaus srovės srautas sukelia poslinkį M K didelių slydimų kryptimi. At S K \u003d 1 M P \u003d M K. IM su faziniu rotoriumi mechaninės charakteristikos R P >0 vadinamas dirbtiniu arba reostatu. Jie parodyti fig. 2.16.
Ryžiai. 2.16. IM su faziniu rotoriumi mechaninės charakteristikos.
Voverės narvelio indukcinis variklis įsijungs, kai M p > M s ir dirbs taške A (žr. 2.15 pav.). Po šio pasipriešinimo momento M s gali būti padidintas iki M K. HELL, taip pat nuolatinės srovės varikliai, su padidėjimu M s automatiškai, be pašalinio įsikišimo, sumažins greitį ω ir padidinti sukimo momentą M iki M ir M s nėra vienodo dydžio, t.y. iš pastovios būsenos didesniu greičiu į pastovią būseną esant lėtesniam greičiui. Kai mažėja M s bus pastebėta priešingai – variklis automatiškai persijungs iš pastovios būsenos esant mažesniam greičiui į pastovią būseną esant didesniam greičiui. IM mechaninės charakteristikos darbinė dalis yra panaši į mechaninę DPT charakteristiką su nepriklausomu sužadinimu - tiesi linija, pasvirusi į abscisių ašį.
AD turi tokių savybių dėl emf. E 2, kurį sukelia rotoriaus apvijoje besisukantis statoriaus magnetinis laukas. At M c > M dinamiškas momentas M d<0 ir rotoriaus greitis ω mažėja. Statoriaus magnetinis laukas, besisukantis pastoviu greičiu ω 0 (sinchroninis greitis) dideliu dažniu kirs rotoriaus apviją. Todėl jis padidės E 2, srovė rotoriaus apvijoje, jo posūkius veikianti ampero jėga, taigi ir sukimo momentas M.
IM perkrovos geba pagal momentą nustatoma pagal kritinio momento santykį M K iki nominalaus laiko M N. Įprastam IM su voverės narvelio rotoriumi M K / M N \u003d 1,7, su faziniu rotoriumi M K / M N \u003d 1,8. Specialiems kranų IM su MTK tipo voverės narvelio rotoriumi ir MTKF tipo faziniu rotoriumi santykis M K / M N \u003d 2,3 ÷ 3,4.
Dėl magnetinio lauko sąveikos su srovėmis asinchroninio variklio rotoriuje susidaro besisukantis elektromagnetinis momentas, kuris linkęs išlyginti statoriaus ir rotoriaus magnetinio lauko sukimosi greitį.
Statoriaus ir rotoriaus magnetinio lauko sukimosi greičių skirtumas indukcinis variklis charakterizuojamas slydimo vertė s = (n1 - n2 ) / n2, kur n1 - sinchroninio lauko sukimosi greitis, aps./min. n2- asinchroninio variklio rotoriaus sukimosi greitis, aps./min. Dirbant su vardine apkrova, slydimas dažniausiai yra mažas, todėl, pavyzdžiui, elektros varikliui, kai n1 = 1500 aps./min., n2 = 1460 aps./min., slydimas yra: s = ((1500 - 1460) / 1500) x 100 = 2,7 %
Jis negali pasiekti net trijų atjungtų mechanizmų, nes su juo rotoriaus laidininkų nekirs magnetinis laukas, juose nesukels EML ir nebus srovės. Asinchroninis momentas, kai s = 0, bus lygus nuliui.
Pradiniu paleidimo momentu rotoriaus apvijose teka srovė tinklo dažniu. Rotoriui įsibėgėjant, bus nustatytas jame esančios srovės dažnis stumdomas indukcinis variklis: f2 = s x f1, kur f1 yra į statorių tiekiamos srovės dažnis.
Rotoriaus varža priklauso nuo jame esančios srovės dažnio, o kuo didesnis dažnis, tuo didesnė jo indukcinė varža. Padidėjus rotoriaus indukcinei varžai, fazės poslinkis tarp įtampos ir srovės statoriaus apvijose didėja.
Todėl paleidžiant indukcinius variklius galios koeficientas yra žymiai mažesnis nei įprasto veikimo metu. Nustatyta dabartinė vertė ekvivalentinė variklio varžos vertė ir taikoma įtampa.
Asinchroninio variklio ekvivalentinės varžos vertė, pasikeitus slydimui, kinta pagal sudėtingą dėsnį. Sumažėjus slydimui per 1–0,15, pasipriešinimas, kaip taisyklė, padidėja ne daugiau kaip 1,5 karto, diapazone nuo 0,15 iki sn om 5–7 kartus, palyginti su pradine verte paleidimo metu.
Srovės dydis kinta atvirkščiai proporcingai lygiavertės varžos pokyčiui.Taigi, užvedus iki maždaug 0,15 slydimo, srovė šiek tiek krenta, o vėliau greitai mažėja.
Variklio sukimo momentas yra nustatomas pagal magnetinio srauto dydį, srovę ir kampinį poslinkį tarp EML ir srovės rotoriuje. Kiekvienas iš šių dydžių savo ruožtu priklauso nuo slydimo, todėl, norint ištirti asinchroninių variklių veikimą, nustatoma sukimo momento priklausomybė nuo slydimo ir tiekiamos įtampos bei dažnio įtaka jam.
Sukimo momentą taip pat galima nustatyti pagal veleno elektromagnetinę galią kaip šios galios ir rotoriaus kampinio greičio santykį. Sukimo momento dydis yra proporcingas įtampos kvadratui ir atvirkščiai proporcingas dažnio kvadratui.
Būdingos momento reikšmės, priklausomai nuo slydimo (arba greičio), yra pradinė sukimo momento vertė(kai variklis vis dar stovi), maksimali sukimo momento vertė(ir atitinkamas slydimas, vadinamas kritiniu) ir minimali leistino greičio momento reikšmė iš nejudančios būsenos į vardinį.
Vardinės įtampos sukimo momento vertės pateiktos elektros mašinų kataloguose. Žinios apie minimalų sukimo momentą yra būtinos apskaičiuojant leistinumą paleisti arba savaime paleisti mechanizmą esant pilnai apkrovai. Todėl jo vertė konkretiems skaičiavimams turi būti nustatyta arba gauta iš tiekiančios įmonės.
Didžiausios sukimo momento vertės dydis nustatomas pagal statoriaus ir rotoriaus indukcinį atsparumą nuotėkiui ir nepriklauso nuo rotoriaus varžos dydžio.
Kritinis slydimas nustatomas pagal rotoriaus varžos ir ekvivalentinės varžos santykį (dėl aktyviosios statoriaus varžos ir statoriaus bei rotoriaus indukcinio atsparumo nuotėkiui).
Padidėjus tik aktyviam rotoriaus pasipriešinimui, padidėja kritinis slydimas ir didžiausias sukimo momentas pasislenka į didesnių slydimų sritį (mažesnis sukimosi greitis). Tokiu būdu galima pasiekti momentų savybių pasikeitimą.
Slydimą galima pakeisti padidinus rotoriaus arba srauto pasipriešinimą. Pirmasis variantas yra įmanomas tik asinchroniniams varikliams su faziniu rotoriumi (nuo S = 1 iki S = Snom), tačiau nėra ekonomiškas. Antrasis variantas yra įmanomas, kai keičiasi maitinimo įtampa, bet tik mažėjimo kryptimi. Valdymo diapazonas yra mažas, nes S didėja, tačiau tuo pat metu sumažėja asinchroninio variklio perkrovos pajėgumas. Kalbant apie efektyvumą, abu variantai yra maždaug lygiaverčiai.
Sukimo momento pokytis esant įvairiems slydimams atliekamas naudojant pasipriešinimą, įvestą į rotoriaus apvijos grandinę. AT asinchroniniai varikliai su voverės narvelio rotoriumi sukimo momento pokytis gali būti pasiektas naudojant kintamų parametrų variklius arba naudojant.
Tinkamas elektros variklio pasirinkimas gamybos mechanizmui yra normalaus ir ekonomiško jo veikimo raktas. Jei elektros variklis pasirinktas teisingai, tai supaprastins elektros pavaros valdymo sistemą ir galbūt sumažins elektros pavaros kainą. Kaip žinote, elektrinė pavara turi užtikrinti ne tik pastovių dydžių (greičių, sukimo momento), bet ir dinaminių (pereinamųjų procesų, tokių kaip pagreitis, stabdymo momentas, paleidimo momentas ir kt.) pastovumą.
Pagrindinis elektros variklių pasirinkimo kriterijus yra priklausomybė, kuri parodo elektros variklio momento M reikšmę ir veleno sukimosi greitį n veikiant šiam momentui. Ši priklausomybė vadinama mechanine charakteristika n=f(M). Pagal mechanines charakteristikas atliekama variklio elektromechaninių savybių analizė, taip pat įvertinamas jo panaudojimo įvairių rūšių mechanizmams ir įrenginiams tikslingumas. Jie gali būti dviejų tipų: natūralūs ir dirbtiniai.
Natūralios mechaninės charakteristikos: jos pašalinamos, kai vardiniai parametrai veikia variklį (vardinė srovė, apvijos varža, įtampa, varžinis momentas ir kt.). Tai yra, variklis yra prijungtas prie maitinimo šaltinio be jokių keitiklių - tiesioginis prijungimas.
Dirbtinės mechaninės charakteristikos: jos pašalinamos, kai į variklio grandinę įvedami papildomi elementai (papildomas rezistorius) arba esant sumažintai maitinimo įtampai, dažniui (jei variklis yra kintamos įtampos) ir kt. Tai yra, dirbtinai įtakojamos variklio mechaninės charakteristikos.
Mechaninės charakteristikos taip pat išsiskiria keičiant veleno sukimosi greitį, priklausomai nuo sukimo momento padidėjimo. Jie yra įvertinti pagal kietumą.
ir nuolydžio statumas:
Norint nustatyti mechaninės charakteristikos standumą, reikia žinoti greičio ir sukimo momento kitimą tam tikroje priklausomybės n=f(M) atkarpoje. Atitinkamai, visi standumo skaičiavimai atliekami procentais arba santykiniais vienetais.
Be to, mechanines charakteristikas galima suskirstyti į grupes:
- Kietas – kai greitis šiek tiek sumažėja didėjant apkrovos momentui. Pavyzdžiui, nepriklausomo sužadinimo DCT NV nuolatinės srovės varikliai arba asinchroninio variklio charakteristikos tiesinė dalis.
- Minkštas - padidėjus apkrovos sukimo momentui, sukimosi greičio pokyčiai yra gana dideli. Tai apima nuoseklaus sužadinimo DPT PV nuolatinės srovės variklius.
Žemiau pateikiamas įvairių elektros variklių mechaninių charakteristikų grafikas:
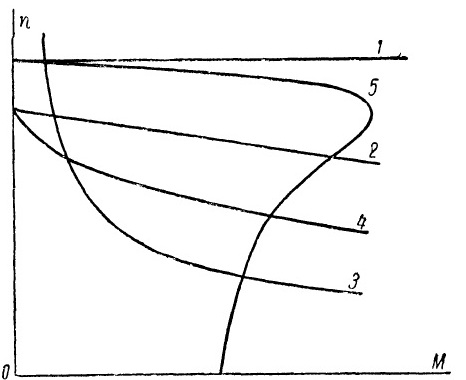
- yra absoliučiai standi sinchroninė mašina
- – standus DPT NV
- - minkštas DPT PV
- – minkštas mišraus sužadinimo DPT
- - asinchroninis variklis
Elektros variklio pasirinkimą lemia gamybos mechanizmų reikalavimai. Tokiose pramonės šakose kaip metalo valcavimas, popieriaus ar kartono gamyba, reikalingas tikslus pastovaus greičio palaikymas, o tokie mechanizmai kaip kėlimas ir transportavimas nereikalauja standžių charakteristikų (DPT PV naudojamas traukos elektrinėse pavarose, taip pat kai kurie krano mechanizmai).