Automobilyje nuolatinė srovė armatūros apvija turi mažą varžą ir prijungus prie tinklo atsiranda paleidimo srovės, kurios gali siekti 15 ... 20I nom. Armatūros srovių padidėjimas virš 2...2,5I nom vertės lemia perjungimo pablogėjimą.
Be to, atsirandančios dinaminės jėgos gali palaipsniui ardyti armatūros apviją, sukelti raktų kirpimą, velenų sukimąsi ir pan. Paleidimo srovių ribojimas atliekamas varžų r 1, r 2, r 3 pagalba, įtrauktų į inkaro grandinę (2.12 pav.). Varikliui įsibėgėjant, EMF didėja, o srovė mažėja. Paeiliui trumpindami varžas su kontaktais KM1, KM2, KMZ, jie atlieka (atlieka) paleidimą. Variklio paleidimo schema parodyta fig. 2.13.
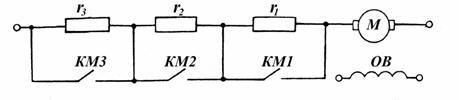
Ryžiai. 2.13. Paleidimo rezistorių įjungimo schema ..
Perjungimo srovių I 1 ir I 2 reikšmės parenkamos atsižvelgiant į elektros pavaros technologijos reikalavimus ir variklio perjungimo galią. Taigi, jie ima I 1 \u003d (2,0 ... 2,5) I H ir I 2 \u003d (1,2 ... 1,3) I H tais atvejais, kai variklio užvedimo trukmė turi įtakos dažnai įjungiamos mašinos veikimui.
Jeigu nori sklandi pradžia Pavyzdžiui, keleiviniai liftai, tada perjungimo srovių reikšmės bus nustatomos pagal leistinus elektros pavaros pagreičius. Tais atvejais, kai paleidimas yra retas ir paleidimo sąlygos nėra ribojamos, srovių I 1 ir I 2 reikšmės gali būti paimtos šiek tiek daugiau nei darbinės srovės (bet daug mažesnės nei pirmuoju atveju, kai I 1 = (2 ... 2,5) I N.
Vertybės paleidimo varžos apskaičiuojamas analitiniais ir grafiniais metodais. Jei yra nustatytas žingsnių skaičius, tai reiškia, kad skaičiavimas atliekamas jau žinomam standartiniam kontaktorių skydui. Jei žingsnių skaičius nežinomas, reikia pasirinkti
Analitinis paleidimo varžų skaičiavimo metodas
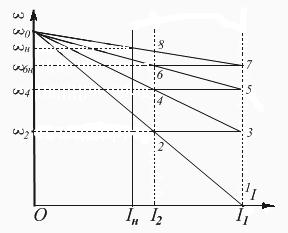
Kai variklis prijungtas prie tinklo, įsibėgėjimas prasideda nuo paleidimo pasipriešinimo R 3 \u003d r I + r 1 + r 2 + r 3 (2.13 pav.). Šios varžos atitinka dirbtinę elektrinę mechaninė charakteristika
1 - 2 - ω 0 (2.14 pav.). Esant srovei I 2 ir greičiui ω 2 (taškas 2), papildoma varža r 3 yra šuntuojama KMZ kontaktais, ir variklio srovė vėl padidėja iki I 1 (taškas 3). Pradžia tęsiama su pasipriešinimu R 3 \u003d r I + r 1 + r 2 pagal charakteristiką Z - 4 - ω o. Šios charakteristikos 4 taške r 2 išjungiamas kontaktu KM2. Su pasipriešinimu
R 3 \u003d r I + r 1 variklis įsibėgėja pagal charakteristiką 5 - 6 - ω o. Esant greičiui ω 6 (6 taškas), paskutinė varža r 1 išjungiama, o variklis patenka į natūralią elektromechaninę charakteristiką 7 - 8 - ω o, išilgai kurios jis įsibėgėja iki greičio, atitinkančio veleno apkrovą.
Norėdami nustatyti papildomų varžų reikšmes, imame srovių santykį, atitinkantį taškus 3 ir 2, esant pradinės diagramos kampiniam greičiui ω 2:
![]() . (2.31)
. (2.31)
Ryžiai. 2.14. Pradinė schema DPT NV.
Variklio EMF reikšmės šiuose taškuose yra lygios, nes sukimosi greitis ω 2 NEKEINTA
Sumažinus įtampą, gauname:
![]() .
.
Esant kampiniam greičiui ω 4 taškams 4-5 rašome:
![]() ;
;
čia E 4 \u003d E 5, o srovės I 5 \u003d I 1, I 4 \u003d I 2, todėl:
![]() .
.
Panašiai ir kampiniam greičiui ω 6 (6 ir 7 taškai):
![]()
arba ![]() .
.
Pažymėkime perjungimo srovių santykį: , tada
Jei būtų m žingsnių, tada pagal analogiją:
Šioje išraiškoje paleidimo etapų skaičius m ir paleidimo srovių daugumas yra tarpusavyje susiję:
![]() (2.34) arba . (2,35)
(2.34) arba . (2,35)
Kiekvienos pakopos pasipriešinimo vertę galima nustatyti taip:
Paleidimo varžų skaičiavimo tvarka
Jei nurodytas žingsnių skaičius m, tada pasipriešinimas apskaičiuojamas taip:
1) nustatykite dabartinę vertę I 1 ir nustatykite R m:
2) Raskite perjungimo srovių santykį:
![]() , (2.37)
, (2.37)
Kur; P n, U n, I n, η n - variklio paso duomenys;
3) apskaičiuokite antrosios perjungimo srovės I 2 vertę:
ir palyginkite su variklio darbine srove I s, atitinkančia didžiausią darbinės mašinos sukimo momentą paleidžiant.
Jei žinomas darbo momentas M s, tada
![]() ,
,
o jei darbinės mašinos veleno galia duota P V.r.m. , Tai
![]() .
.
Jei I 2 > (1.1...1.2) I c, nustatome kiekvienos pakopos varžą:
...![]() . (2.38)
. (2.38)
Jeigu netenkinama sąlyga I 2 > 1,1I c, tada pasirenkame naują
(didesnę) reikšmę I 1 ir pakartokite skaičiavimą.
Jei pasipriešinimo žingsnių skaičius nežinomas, skaičiavimas atliekamas tokia seka:
1) nustatome perjungimo srovių I 1, I 2 reikšmes ir nustatome λ:
2) nustatyti žingsnių skaičių:
Kur; ![]() .
.
Gauta m reikšmė (jei ji yra trupmeninė dalis) suapvalinama iki
artimiausią sveikąjį skaičių ir nurodykite λ ir srovę I 2:
![]() ; .
; .
Tolesnis skaičiavimas atliekamas kaip ir pirmuoju atveju. Atlikus pirmojo ar antrojo varianto skaičiavimus, būtina patikrinti skaičiavimų teisingumą. Norėdami tai padaryti, nustatome bendrą sumą
atsparumas:
ir palyginkite su originalu. Skaičiavimų nuokrypis turėtų būti leistinos paklaidos ribose - 5 ... 7%.
Grafinis paleidimo varžų skaičiavimo metodas
Šis skaičiavimo metodas vizualiai parodo papildomų varžų vertes, tačiau turi reikšmingas trūkumas -
skaičiavimų tikslumas priklauso nuo variklio paleidimo schemos sudarymo tikslumo.
Elektromechaninės charakteristikos nuolatinės srovės varikliui su papildoma varža R išorinė, įtraukta į armatūros grandinę. parodyta pav. 2.15.
2.15 pav. DPT NV elektromechaninės charakteristikos su papildomų rezistorių įvedimu armatūros grandinėje.
Vardinės srovės ir greičio ω EML lygtis
(taškas ties):
Paskutinę išraišką padalijame į sf n:
![]() . (2.39)
. (2.39)
Iš 2.15 pav. turime:
 (2.40)
(2.40)
Lyginant išraiškas (2.39) ir (2.40), rašome:
todėl, esant pastovioms I n ir sf n reikšmėms, atkarpos ab reikšmė yra proporcinga . Jei charakteristika eina per tašką r , tada viską, kas taikoma U n, subalansuoja kritimas
atsparumas Rn:
R n turi pavadinimą vardinė varža,![]() . Vardinė variklio varža – e tada tai yra armatūros grandinės varža, kuriai esant įjungimo momentu (esant ω = 0) inkaro apvija teka vardinė srovė. Atkarpa ag yra proporcinga R n. Taigi, atsižvelgiant į vardinės srovės linijos charakteristikos atkirsto segmento vertę, galima apskaičiuoti armatūros grandinės varžą. Tačiau tam reikia žinoti mastą
. Vardinė variklio varža – e tada tai yra armatūros grandinės varža, kuriai esant įjungimo momentu (esant ω = 0) inkaro apvija teka vardinė srovė. Atkarpa ag yra proporcinga R n. Taigi, atsižvelgiant į vardinės srovės linijos charakteristikos atkirsto segmento vertę, galima apskaičiuoti armatūros grandinės varžą. Tačiau tam reikia žinoti mastą
atsparumas:
Kur; U n, I n, R n, - vardinė įtampa, variklio srovė ir galia.
Pirmasis būdas nustatyti skalę yra tikslesnis, nes
segmentas ag yra didesnis nei segmentas ab.
Skaičiuojant nuolatinės srovės variklio paleidimo varžą grafiniu metodu, galimi du variantai.
1. Nustatomas starto etapų skaičius m.
Pagal mašinos paso duomenis mes sukuriame natūralią elektromechaninę charakteristiką, naudodami du taškus (ω o, M = 0) ir (I n, ω n)
(2.16 pav.). Atidėkite perjungimo srovių I 1 ir I 2 reikšmes.
Jų vertės turi būti pagrįstos elektros pavaros technologijos reikalavimais ir variklio perjungimo galia. Srovės I 1 ribinė vertė imama lygi (2 ... 2,5) I n. Srovė I 2 \u003d (1,2 ... 1,3) I n. Per taškus, atitinkančius I 1 ir I 2 reikšmes srovių ašyje, nubrėžiame dvi tiesias linijas, lygiagrečias sukimosi dažnio ašiai. Taškus 1 ir ω o sujungiame tiesia linija, kuri taške 2 kerta srovę I 2 .
Tolesnė statybų tvarka nuo 2 punkto iki 3 ir kt. matomas iš fig. 2.16. Dėl konstrukcijos reikia patekti į natūralios elektromechaninės charakteristikos ir perjungimo srovės linijos I 1 susikirtimo tašką (7 taškas). Jei degtukas nepasiteisino arba pėdų skaičius nėra lygus nurodytam, tuomet reikia pakeisti srovės I 2 arba I 1 reikšmę ir pakartoti konstrukciją.

Ryžiai. 2.16. Grafinis paleidimo varžų skaičiavimo metodas
Taigi, variklio užvedimo procesas keliais etapais, parodytas Fig. 2.16 pasižymi tuo, kad variklio srovė paleidimo metu skiriasi nuo . Paleidimo pradžioje, tada, kai variklis įsibėgėja, jo EMF didėja, dėl to variklio armatūros grandinėje pradeda mažėti srovė, taigi ir variklio sukimo momentas. Kai pasiekia srovę, dalis paleidimo reostato išjungiama, kad variklio srovė vėl pasiektų vertę ir pan.
Pašalinus paleidimo rezistorius, mažėja armatūros grandinės varža, todėl mažėja ir elektromechaninės konstantos vertė, o tai lemia kiekvieno paskesnio etapo paleidimo trukmės sumažėjimą.
Nuolatinės srovės varikliai gali turėti nepriklausomą, lygiagretų, nuoseklų arba mišrų žadinimą (6.1 pav.).
Ryžiai. 6.1. Nepriklausomos nuolatinės srovės variklio grandinės ( A),
lygiagretus ( b), nuoseklus ( V) ir sumaišytas ( G) sužadinimas
(viršutinė schemos "c" dalis priklauso schemai "a")
Lygiagrečiame žadinimo variklyje lauko apvija yra lygiagrečiai sujungta su armatūros gnybtais. Bet per šią apviją tekanti srovė, skirtingai nuo armatūros srovės, nepriklauso nuo apkrovos ir yra nulemta armatūrai taikomos įtampos bei bendros sužadinimo grandinės varžos. Dėl šios priežasties šunto sužadinimo variklis taip pat vadinamas nepriklausomo sužadinimo varikliu.
Sukimo momentas M Nuolatinės srovės variklis ir jo EMF E nustatomi pagal formules
M= į F aš aš; E= kФω,
čia k yra variklio projektinis koeficientas;
Ф – magnetinis srautas, Wb;
aš i - armatūros srovė, A.
ω yra kampinis greitis, rad/s.
Elektromechaninės lygtys ω = ƒ ( aš i) ir mechaninis ω = ƒ ( M) charakteristikos turi formą
ω = U/(kF) – ( R aš + R p) / (k F) aš aš;
ω = U/(kF) – ( R aš + R p) / (iki 2 F 2) M.
Idealios tuščiosios eigos kampinis greitis (at aš i = 0 arba M = 0)
ω 0 = U/(kF).
Ant pav. 6.2 pateikiamos nuolatinės srovės variklio su nepriklausomu žadinimu (DPT NV) mechaninės charakteristikos visais darbo režimais. Variklio režimo charakteristikų taškai yra šie: idealios tuščiosios eigos taškas (ω 0, M= 0); vardinis režimo taškas (ω n, M n); taškas trumpas sujungimas (ω = 0, M = MĮ).
Mechaninės charakteristikos standumą lemia sužadinimo srautas ir inkaro grandinės varža:
β = d M/dω = - iki 2 Ф 2 / ( R aš + R p) = - Mį / ω.
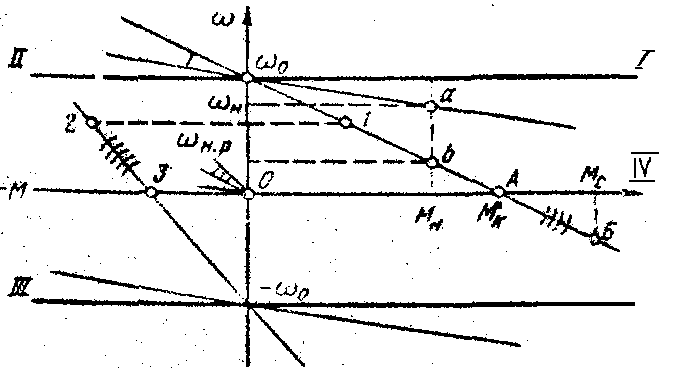
Ryžiai. 6.2. Kombinuotos nuolatinės srovės variklio su nepriklausomu sužadinimu mechaninės charakteristikos
Didžiausia standumo modulio vertė atitinka natūralią mechaninę charakteristiką, nes žadinimo srovė yra lygi vardinei srovei ir valdymo varžai R p \u003d 0. Didėjant reostato varžai R p didėja mechaninės charakteristikos nuolydis, o kampinis greitis mažėja. Už nurodytą pasipriešinimo vertę R p ir vardinis sukimo momentas M n variklio kampinis greitis
ω n.r = ω 0 (1 – aš n ( R aš + R R) / U n.
Norint apskaičiuoti mechanines charakteristikas, būtina žinoti variklio armatūros varžą R i, kuris nurodytas kataloguose. Jei nėra gamyklinių duomenų, vertė R Aš randu maždaug pagal formulę
R i \u003d 0,5 (1 - ŋ n) ( U n/ aš n).
Kadangi DPT NV mechaninės charakteristikos yra paprastos, pakanka turėti du taškus joms nubraižyti:
1) ω = ω 0 ir M = 0,
2) ω = ω n (arba ω = ω n.r) ir M = M n.
DPT NV galimi šie trys elektrinio stabdymo režimai.
1. Regeneracinis stabdymas, kuris atsiranda, kai variklio sūkiai viršija idealų tuščiosios eigos greitį. Tai ekonomiškiausia, nes stabdymo energija perduodama į elektros tinklą. Šio režimo mechaninės charakteristikos yra atitinkamų II kvadranto variklio režimo charakteristikų tęsinys. Regeneracinio stabdymo metu variklio grandinė nesikeičia.
2. Dinaminis stabdymas. Variklio armatūra yra atjungta nuo tinklo ir sutrumpinta iki varžos. Šiuo atveju judančių dalių (mechanizmo ir variklio armatūros) mechaninė energija paverčiama elektros energija, kuri prarandama šiluminės energijos pavidalu inkaro grandinės varžoje. Mechaninės charakteristikos šiuo stabdymo režimu eina per pradinę vietą (6.2 pav. - linijos su trimis įpjovomis).
3. Atbulinis stabdymas atliekama dviem būdais:
1) didelio pasipriešinimo įvedimas armatūros grandinėje. Tokiu atveju variklio sukimo momentas tampa mažesnis už statinės apkrovos sukimo momentą. M Su. Variklis sustoja (taške A), o tada veikiamas sukimo momento M c pradeda suktis kita kryptimi, sukurdamas stabdymo momentą; taške B susidaro pastovi būsena. Mechaninės charakteristikos yra atitinkamų variklio režimo charakteristikų tęsinys (6.2 pav. - eilutės su keturiais serifais);
2) stabdymas pakeliui keičiant armatūros apvijos poliškumą. Variklis veikia taške 1 , po perjungimo jis persijungs į reostatinę charakteristiką taške 2. Išilgai linijos 2–3 įvyksta lėtėjimas (linija su penkiais serifais). Taške 3 variklis sustoja ir turi būti atjungtas nuo elektros tinklo, kad būtų išvengta perjungimo į variklio režimą su atvirkštine sukimosi eiga.
IN Nuolatinės srovės variklis su nuosekliu sužadinimude-niem armatūros srovė taip pat yra žadinimo srovė. Sužadinimo magnetinis srautas didėja didėjant apkrovai, dėl to kampinis greitis mažėja pagal (6.1) lygtį ir variklio mechaninė charakteristika bus minkšta (6.3 pav.). Dėl šios priežasties NV DPT gana lengvai ir sklandžiai įveikia perkrovas ir turi didelį paleidimo momentą. Šios variklio savybės leidžia jį plačiai naudoti transporto mechanizmų pavaroje. Variklio mechaninės charakteristikos gerokai sušvelnėja, kai į armatūros grandinę įvedamas reostatas (6.3 pav., linijos su viena įpjova).
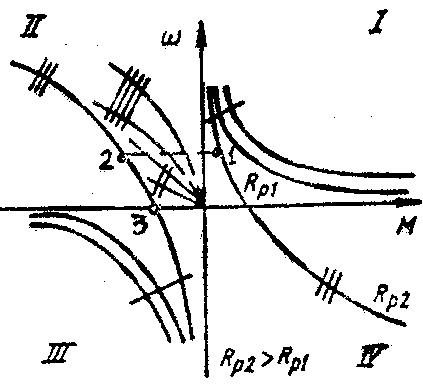
Ryžiai. 6.3. Nuolatinės srovės variklio mechaninės charakteristikos
su nuosekliu sužadinimu
DPT PV neįmanoma įdiegti regeneracinio stabdymo režimo, nes jame nėra idealaus tuščiosios eigos greičio.
Dinaminis stabdymas gali būti atliekamas pagal schemą su savaiminiu sužadinimu ir su nepriklausomu sužadinimu. Pirmuoju atveju inkaras ir žadinimo apvija atjungiami nuo tinklo ir uždaromi prie reostato. Į venkite mašinos išdeginimo, reikia perjungti žadinimo apviją (arba inkarą), kad srovės kryptis žadinimo apvijoje nesikeistų. Šiuo atveju mašina savaime sužadinama esant tam tikrai armatūros grandinės varžai tik esant tam tikrai kampinio greičio vertei; susijaudinęs sukuria stabdymo momentą. Mechaninės charakteristikos yra nelinijinės (6.3 pav. - kreivės su keturiomis išpjovomis).
Variklio mechaninės charakteristikos dinaminio stabdymo su nepriklausomu žadinimu režimu yra panašios į atitinkamas variklio su nepriklausomu žadinimu charakteristikas (6.3 pav. - linijos su dviem įpjovomis). Šis stabdymo būdas rastas platus pritaikymas, o pirmasis metodas naudojamas retai, daugiausia avariniu atveju, pavyzdžiui, kai nutrūksta tinklo įtampa.
Stabdymas opozicijoje, kaip ir DPT NV, atliekamas dviem būdais:
1) įtraukimas į didelio pasipriešinimo armatūros grandinę;
2) keičiant armatūros apvijos poliškumą, paliekant nepakitusią srovės kryptį žadinimo apvijoje.
Pirmuoju metodu mechaninė charakteristika bus charakteristikos, atitinkančios variklio režimą, tęsinys (6.3 pav. - linija su trimis įpjovomis). Antruoju metodu stabdymas atliekamas išilgai linijos 1 –2–3 .
Nuolatinės srovės elektros pavarų greičio reguliavimas. DPT NV greitis gali būti reguliuojamas:
1) keičiant varžą armatūros grandinėje;
2) sužadinimo srauto pokytis;
3) keičiant į armatūrą tiekiamą įtampą.
reglamentas pagal pirmąjį metodą turi didelių trūkumų:
- mažėjant kampiniam greičiui mažėja mechaninių charakteristikų standumas, didėja galios nuostoliai pagrindinėje grandinėje;
- valdymo diapazonas yra ribotas, ypač esant mažoms apkrovoms;
– mažas reguliavimo lygumas ir tikslumas.
Dėl šių priežasčių tokio tipo reguliavimas retai naudojamas nuolatinės srovės pavaroje.
Autorius antras būdas galima reguliuoti magnetinį srautą tik mažėjimo kryptimi (kadangi vardiniame režime variklio magnetinė grandinė yra prisotinta), o tai atitinka greičio padidėjimą virš vardinio. Galimas greičio reguliavimo diapazonas standartiniam varikliui neviršija 2. Viršutinę greičio ribą riboja variklio armatūros elementų - armatūros apvijų tvarsčių, kolektoriaus - mechaninis stiprumas.
Pagrindinis būdas valdyti DPT NV greitį yra metodas, pagrįstas armatūrai tiekiamos įtampos keitimu, kuris atliekamas naudojant specialų reguliuojamą keitiklį. Tiristorių keitikliai dažniausiai naudojami kaip atskiri maitinimo šaltiniai. Pavaros mechaninių charakteristikų standumas pagal sistemą "keitiklis - DCT NV" yra beveik pastovus. Mechaninės charakteristikos yra lygiagrečių viena kitai tiesių linijų šeima. Reguliavimo diapazonas, lygumas ir tikslumas čia yra didesni nei naudojant kitus reguliavimo būdus. Todėl ši pavaros sistema naudojama mechanizmams, kuriems reikalingas gilus ir sklandus greičio reguliavimas.
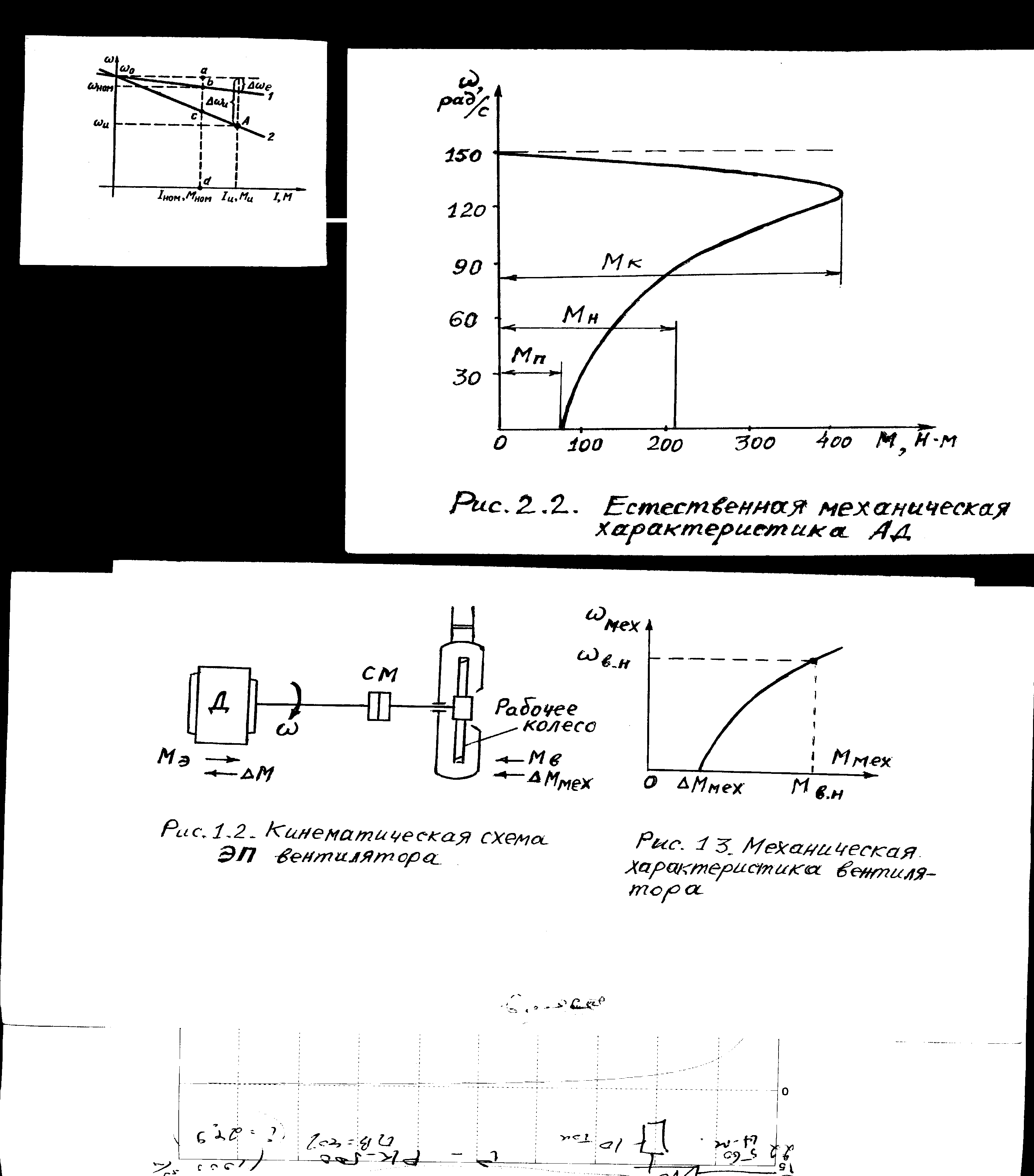
Papildomų rezistorių skaičiavimas DPT NV armatūros grandinėje. Jei žinoma natūrali elektromechaninė arba mechaninė charakteristika 1 variklis (6.4 pav.) ir jo paso duomenys, tada varžos skaičiavimas R d, įtraukus į armatūros grandinę, norima dirbtinė charakteristika 2 eis per tašką A su nurodytomis koordinatėmis ω ir, aš ir arba ω ir, M ir, gali būti atliekami šiais dažniausiai pasitaikančiais metodais.
Ryžiai. 6.4. DPT HB charakteristikos vertei skaičiuoti
valdymo rezistoriai
Proporcinis metodas. Parašykime greičio kritimų prie srovės santykį aš ir arba momentas M ir apie natūralų Δω e bei norimą dirbtinį Δω ir charakteristikas:
Δω e / Δω u = aš Ir R aš/( aš Ir ( R aš + R e)) = R aš/( R aš + R e).
Tada norima vertė
R d = R i (Δω ir / Δω e - 1).
Segmento metodas nereikia žinoti variklio vidinės varžos vertės R i (be to, jo reikšmę galima nustatyti pagal žinomą gamtinę charakteristiką).
Parašykime variklio greičio išraišką ant duotosios dirbtinės charakteristikos (žr. 6.4 pav.) esant vardinei srovei aš n, momentas M n, magnetinis srautas F n ir įtampa U n:
ω ir = U n / (kF n) (1 - aš n R/ U n),
Kur U n / (kF n) \u003d ω 0.
ω ir = ω 0 (1 – R / R n).
Čia R n = U n/ aš n - vadinamoji nominali varža, kuri yra bazinė vertė skaičiavimuose, Ohm.
Santykis
R / U n \u003d (ω 0 – ω ir) / ω 0 \u003d δ
atspindi svarbią NV DPT savybę: santykinis greičio skirtumas δ \u003d Δω / ω 0 yra lygus santykinei armatūros grandinės aktyviajai varžai R / R n.
Pažymime pav. 6.4 būdingi taškai A, b,Su, d ir atkreipkite dėmesį, kad ω 0 – ω ir = Δω = tūzas, ω 0 = Reklama. Tada R = R n Δω / ω 0 = R n tūzas/Reklama; R d = R n bSu/Reklama; R aš = R n Ab /Reklama.
Taigi, norint rasti R d pirmiausia turite nustatyti atkarpų ilgį pagal charakteristikas bSu Ir Reklama adresu vardinė srovė arba sukimo momentą ir apskaičiuokite vardinę varžą R n = U n/ aš n.
Papildomų rezistorių skaičiavimas taip pat gali būti atliekamas naudojant šias formules tam tikrai leistinai srovei aš papildomas, kuris nustatomas pagal leistino momento reikšmę M papildomos arba sąlygos užvedimui, atbuline eiga ir stabdymui.
Rezistoriaus varža R d1 pradžioje ( E = 0)
R q1 = ( U / aš papildyti) - R aš.
Rezistoriaus varža R d2 dinaminio stabdymo metu
R q2 = ( E / aš papildyti) - R aš ≈ ( U / aš papildyti) - R I).
Rezistoriaus varža R d3 važiuojant atbuline eiga arba stabdant antiperjungimo būdu
R d3 = (( U + E) / aš papildyti) - R i ≈ (2 U / aš papildyti) - R aš.
Pavyzdys . DPT NV tipo PBST-53 turi šiuos paso duomenis: R n = 4,8 kW; n n = 1500 aps./min.; U n = 220 V; aš n = 24,2 A; R i = 0,38 omo; aš v.n = 0,8 A. Būtina nustatyti:
1) rezistoriaus varža, kurios įtraukimas į variklio armatūros grandinę užtikrins dirbtinės mechaninės charakteristikos praėjimą per tašką, kurio koordinatės ω ir = 90 rad/s, M n = 25 Nm;
2) rezistorių varža, kurių įtraukimas apribos srovę paleidimo ir stabdymo metu, prieštaraudamas lygiui aš pridėti = 3 aš n.
Jei sužadinimo apvija ir variklio armatūra yra prijungti prie nuolatinės srovės tinklo su įtampa U, tada atsiranda elektromagnetinis sukimo momentas M em. Variklio veleno naudingas sukimo momentas M yra mažesnis už elektromagnetinį priešpriešinio momento, kurį mašinoje sukuria trinties jėgos, verte ir lygus momentui M x x.x režimu, t.y. M \u003d M em -M x.
Pradinis sukimo momentas variklis turi būti didesnis už statinį stabdį M t likusioje rotoriaus dalyje, kitaip variklio armatūra nepradės suktis. Pastovioje būsenoje (n = const) yra sukimosi M ir stabdymo M t momentų pusiausvyra:
M \u003d M em - M x \u003d M t (8)
Iš mechanikos žinoma, kad mechaninė galia variklis gali būti išreikštas sukimo momentu ir kampinis greitis
Todėl naudingas variklio sukimo momentas M (N m), išreiškiamas naudingąja galia P (kW) ir sukimosi greičiu n (rpm),
M=9550P/n (10)
Aptarkime keletą svarbių nuolatinės srovės variklių paleidimo ir veikimo klausimų. Iš lygties elektros būklė variklis iš to seka
I i \u003d (U - E) / R i (11)
Darbo režime armatūros srovė I I yra ribojama e. d.s. E jei n apytiksliai lygus n nom. Paleidimo metu n = 0, e. d.s. E = 0 ir paleidimo srovė I p \u003d U / R i yra 10–30 kartų didesnis nei nominalus. Todėl tiesioginis variklio užvedimas, ty tiesioginis armatūros prijungimas prie tinklo įtampos, yra nepriimtinas. Norint apriboti didelę armatūros paleidimo srovę, prieš paleidimą nuosekliai su armatūra įjungiamas paleidimo reostatas R p su maža varža. Šiuo atveju, kai E = O
I p \u003d U / (R i - R p)<< U/R я (12)
Reostato varža Rp parenkama pagal leistiną armatūros srovę.
Varikliui įsibėgėjant iki vardinio greičio e. d.s. E didėja, o srovė mažėja ir paleidimo reostatas palaipsniui ir visiškai pašalinamas (paleidimo reostatai skaičiuojami trumpalaikiam įjungimui). Reguliuojantis reostatas R reg žadinimo grandinėje su santykinai dideliu pasipriešinimu (dešimtys ir šimtai omų) prieš užvedant variklį visiškai pašalinamas, kad paleidžiant žadinimo srovė ir statoriaus magnetinis srautas F būtų vardinis. Dėl to padidėja užvedimo momentas, o tai užtikrina greitą ir lengvą variklio įsibėgėjimą.
Užvedus ir įsibėgėjus, variklis veikia pastoviai, kai stabdymo momentas ant veleno Mt bus subalansuotas pagal variklio sukurtą momentą M em. , y., M em == M t ( už n = konst.)
Nuolatinės srovės varikliai gali atkurti pastovią veikimo būseną, sutrikdytą dėl stabdymo momento pasikeitimo, t. y. jie gali sukurti sukimo momentą M , lygi naujai stabdymo momento M t vertei esant atitinkamai naujam greičiui n .
Iš tiesų, jei apkrovos M t stabdymo momentas pasirodys didesnis nei variklio sukimo momentas M em, tada armatūros greitis sumažės. Esant pastoviai įtampai U ir srautui F, tai sumažins e. d.s. E armatūra, armatūros srovės ir sukimo momento padidėjimas, kol pasiekiama pusiausvyra, kuriai esant M em \u003d M t ir n "
Dažnio valdymas
Nuolatinės srovės variklio armatūros greitis nustatomas pagal elektros būsenos U = E + R I I I lygtį, į ją pakeitus e. d.s. E = cfn:
 (13)
(13)
Įtampos kritimas armatūroje R I I I mažas: esant vardinei apkrovai neviršija 0,03 - 0,07 U nom.
Taigi nuolatinės srovės variklio greitis yra tiesiogiai proporcingas naudojamai tinklo įtampai ir atvirkščiai proporcingas statoriaus magnetiniam srautui . Iš (13) lygties matyti, kad variklio sūkius galima valdyti dviem būdais: keičiant statoriaus srautą Ф arba varikliui tiekiamą įtampą U. Greičio reguliavimas keičiant mašinos magnetinį lauką atliekamas naudojant reguliavimo reostatą variklio sužadinimo grandinėje. Varikliui tiekiama įtampa keičiama reguliuojant šaltinio įtampą.
Prie armatūros grandinės galite pridėti papildomą reostatą. Šiuo atveju paleidimo reostatas pakeičiamas paleidimo reostatu. Tada (13) lygtis turi formą
 (14)
(14)
Iš to išplaukia, kad variklio sūkius galima reguliuoti keičiant tinklo įtampą, balasto reostato varžą arba statoriaus srautą.
Variklio apsisukimas. Iš variklio sukimo momento M em \u003d kFI i lygties išplaukia, kad apsukimas, ty pakeitus armatūros sukimosi kryptį, gali būti atliktas keičiant srovės kryptį sužadinimo apvijoje (srauto Ф) arba armatūros srovė.
Norint pakeisti variklį „važiuojant“, pakeičiama armatūros srovės kryptis (perjungiant armatūros laidus), o sužadinimo apvija neperjungiama, nes ji turi didelę induktyvumą ir jos grandinės nutraukimas srove yra nepriimtinas. Atjungto variklio atsukimas taip pat atliekamas keičiant srovės kryptį lauko apvijoje (perjungiant jo išėjimus).
Rusijos Federacijos švietimo ir mokslo ministerija
SEI VPO Pietų Uralo valstybinis universitetas
Filialas Zlatoust mieste
DC varikliai
ZD-431.583.270102
Užbaigė: Sharipova Yu.R.
Grupė: ZD-431
Patikrintas: Rumyantsev.E.
1. Įvadas
2. Nuolatinės srovės variklių įtaisas ir veikimo principas
3. Variklių užvedimas
4. Variklių techniniai duomenys
5. Nuolatinės srovės variklių efektyvumas
6 DC variklio charakteristikos
6.1 Veiklos duomenys
6.2 Mechaninė charakteristika
7. Naudotos literatūros sąrašas
1. Įvadas
Nuolatinės srovės elektros mašinos yra plačiai naudojamos įvairiose pramonės šakose.
Reikšmingas nuolatinės srovės elektros variklių pasiskirstymas paaiškinamas vertingomis jų savybėmis: dideliais paleidimo, stabdymo ir perkrovos momentais, santykinai dideliu greičiu, kuris svarbus važiuojant atbuline eiga ir stabdant, galimybe plačiai ir sklandžiai valdyti greitį.
Nuolatinės srovės varikliai naudojami reguliuojamoms pavaroms, pavyzdžiui, įvairių mašinų ir mechanizmų pavaroms. Šių elektros variklių galia siekia šimtus kilovatų. Dėl gamybos procesų ir mechanizmų valdymo automatizavimo plečiasi mažos galios bendrosios paskirties nuolatinės srovės variklių, kurių galia nuo vienetų iki šimtų vatų, taikymo sritis.
Priklausomai nuo maitinimo grandinės, nuolatinės srovės mašinos žadinimo apvijos skirstomos į keletą tipų (su nepriklausomu, lygiagrečiu, nuosekliu ir mišriu sužadinimu).
Metinė nuolatinės srovės mašinų produkcija Rusijos Federacijoje yra daug mažesnė nei kintamosios srovės mašinų, o tai lemia didelė nuolatinės srovės variklių kaina.
Iš pradžių buvo sukurtos nuolatinės srovės mašinos. Ateityje juos iš esmės pakeitė kintamosios srovės aparatai. Dėl galimybės sklandžiai ir ekonomiškai reguliuoti sukimosi greitį nuolatinės srovės varikliai išlaiko dominuojantį vaidmenį transporte, varant metalurgijos mašinas, kranuose ir kėlimo bei transportavimo mechanizmuose. Automatikos sistemose nuolatinės srovės mašinos plačiai naudojamos kaip vykdomieji varikliai, varikliai, skirti valdyti savirašomus juostinius mechanizmus, kaip tachogeneratoriai ir elektrinių mašinų stiprintuvai.
2. Nuolatinės srovės variklių įtaisas ir veikimo principas
Nuolatinės srovės mašinų (generatorių ir variklių) įtaisas supaprastinta forma parodytas 1 pav. Pagrindiniai 2 ir papildomi 4 poliai yra pritvirtinti prie mašinos statoriaus plieno korpuso 1. Ant pagrindinių polių yra sužadinimo apvija 3, ant papildomų polių – papildomų polių apvija 5. Sužadinimo apvija sukuria mašinos magnetinį srautą F.
1 pav
Ant variklio veleno 10 pritvirtinta cilindrinė magnetinė grandinė 6, kurios grioveliuose yra armatūros apvija 7. Armatūros apvijos sekcijos pritvirtintos prie kolektoriaus 9. Spyruoklėmis prie jo prispaudžiami fiksuoti šepečiai 8. Kolektorius pritvirtintas prie variklio veleno susideda iš keleto varinių plokščių. Kolektoriaus ir šepečių pagalba armatūros apvija prijungiama prie išorinės elektros grandinės. Varikliuose jie taip pat padeda konvertuoti išorinės grandinės srovę, kurios kryptis yra pastovi, į srovę, kuri keičia kryptį armatūros apvijos laiduose.
Ant jų esantys papildomi poliai su apvija sumažina kibirkštis tarp šepečių ir mašinos komutatoriaus. Papildomų polių apvija yra nuosekliai sujungta su armatūros apvija ir dažnai nerodoma elektros grandinėse.
Siekiant sumažinti galios nuostolius, armatūros magnetinė šerdis yra pagaminta iš atskirų plieno lakštų. Visos apvijos pagamintos iš izoliuotos vielos. Be variklių su dviem pagrindiniais poliais, yra nuolatinės srovės mašinos su keturiais ar daugiau pagrindinių polių. Tokiu atveju atitinkamai padidėja papildomų polių ir šepečių komplektų skaičius.
Jei variklis prijungtas prie nuolatinės įtampos tinklo, sužadinimo apvijos sukuriamo magnetinio lauko ir armatūros laidininkų srovės sąveika sukelia armatūrą veikiantį sukimo momentą:
![]() (1)
(1)
kur K M yra koeficientas, priklausantis nuo mašinos projektinių parametrų; Ф - vieno poliaus magnetinis srautas; I I - armatūros srovė.
Jei variklio sukimo momentas, kai n = 0, viršija stabdymo momentą, kuriuo variklis yra apkrautas, armatūra pradės suktis. Didėjant sukimosi greičiui n, didėja armatūroje sukeltas EML. Dėl to sumažėja armatūros srovė:
![]() (3)
(3)
kur r I – armatūros varža.
Srovės I I sumažėjimo pasekmė yra variklio sukimo momento sumažėjimas. Kai variklio ir apkrovos sukimo momentai yra vienodi, sukimosi greitis nustoja keistis.
Variklio sukimo momento kryptis, taigi ir armatūros sukimosi kryptis, priklauso nuo magnetinio srauto ir srovės krypties armatūros apvijos laiduose. Norint pakeisti variklio sukimosi kryptį, reikia pakeisti armatūros srovės arba lauko srovės kryptį.
3. Variklių užvedimas
Iš (3) formulės išplaukia, kad pirmuoju momentu po variklio įjungimo nuolatinės įtampos tinkle, t.y. kada ir,
Kadangi varža r I yra maža, armatūros srovė gali būti 10 ... 30 kartų didesnė už vardinę variklio srovę, o tai yra nepriimtina, nes tai sukels stiprią kibirkštis ir kolektoriaus sunaikinimą. Be to, esant tokiai srovei, atsiranda nepriimtinai didelis variklio sukimo momentas, o dažnai paleidžiant, galimas armatūros apvijos perkaitimas.
Norėdami sumažinti paleidimo srovę armatūros grandinėje, įtraukiamas paleidimo rezistorius, kurio varža, didėjant variklio sūkiams, sumažėja iki nulio. Jei variklio užvedimas yra automatizuotas, paleidimo rezistorius susideda iš kelių etapų, kurie, didėjant greičiui, išjungiami nuosekliai.
Armatūros paleidimo srovė
![]()
Varikliui įsibėgėjant, EMF didėja armatūros apvijoje, ir, kaip matyti iš (3) formulės, sumažėja armatūros srovė I I. Todėl didėjant variklio sūkių dažniui, armatūros grandinės varža mažėja. Norint gauti didelį paleidimo momentą esant santykinai mažai paleidimo srovei, variklis paleidžiamas didžiausiu magnetiniu srautu. Todėl paleidimo metu žadinimo srovė turėtų būti didžiausia leistina, t.y. nominalus.
4.Techniniai variklių duomenys
Variklio pase ir nuolatinės srovės variklių informacinėje literatūroje nurodyti šie techniniai duomenys: vardinė įtampa U ir galia P n, sukimosi greitis n n, srovė I n, efektyvumas.
Pagal vardinę U n įtampą, kuriai suprojektuota armatūros apvija ir kolektorius, taip pat daugeliu atvejų lygiagrečiojo lauko apvija. Atsižvelgiant į vardinę įtampą, parenkamos variklio elektros izoliacinės medžiagos.
Nominali srovė I n - didžiausia leistina srovė (suvartota iš tinklo), kuriai esant variklis įkaista iki aukščiausios leistinos temperatūros, veikiantis tokiu režimu (ilgalaikis, pertraukiamas, trumpalaikis), kuriam jis skirtas:
![]()
kur I yan - armatūros srovė esant vardinei apkrovai; I ext - žadinimo apvijos srovė esant vardinei įtampai.
Pažymėtina, kad lygiagretaus žadinimo variklio žadinimo srovė I vn yra santykinai maža, todėl, esant vardinei apkrovai, dažniausiai imama
Nominali galia R n – variklio ant veleno išvystyta galia, kai jis veikia vardine apkrova (sukimo momentu) ir vardiniu greičiu n n.
Sukimosi greitis n n, o naudingumo koeficientas atitinka variklio darbą su srove I n, įtampa U n be papildomų rezistorių variklio grandinėse.
Bendruoju atveju galia ant veleno P 2, momentas M ir sukimosi greitis n yra susiję su ryšiu:
Variklio sunaudota galia iš tinklo P 1, reikšmės P 2, efektyvumas, U, I yra susietos ryšiais:
Akivaizdu, kad šie santykiai galioja ir vardiniam variklio darbo režimui.
5. Nuolatinės srovės variklių efektyvumas
Efektyvumas yra svarbiausias nuolatinės srovės variklių rodiklis. Kuo jis didesnis, tuo mažiau galios P ir srovės I sunaudoja variklis iš tinklo esant tokiai pačiai mechaninei galiai. Apskritai priklausomybė yra tokia:
![]() (9)
(9)
kur - nuostoliai armatūros apvijoje; - nuostoliai sužadinimo apvijoje; - nuostoliai armatūros magnetinėje grandinėje; - mechaniniai nuostoliai.
Galios nuostoliai nepriklauso ir mažai priklauso nuo variklio apkrovos.
Varikliai apskaičiuojami taip, kad didžiausia naudingumo vertė būtų srityje, artima vardinei galiai. Variklių veikimas esant mažoms apkrovoms yra nepageidautinas dėl mažų r i verčių. Variklių su skirtingais sužadinimo būdais ir galia nuo 1 iki 100 kW, esant vardinei apkrovai, naudingumo vertės skiriasi ir vidutiniškai yra 0,8.
6. Nuolatinės srovės variklių charakteristikos
6.1. Veikimo charakteristikos
Darbuotojai vadinami reguliuojančiais, dideliu greičiu, sukimo momentu ir efektyvumu. charakteristikos.
Valdymo charakteristika
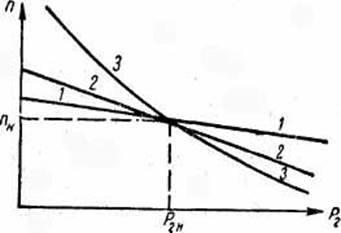
Valdymo charakteristika parodo sukimosi greičio P priklausomybę nuo žadinimo srovės Ib, jei armatūros srovė Ia ir tinklo įtampa U išlieka nepakitusios, ty n=f(Iv), kai Ia=const ir U=const.
Kol mašinos magnetinės pavaros plienas nėra prisotintas, srautas Ф kinta proporcingai sužadinimo srovei Iв. Šiuo atveju valdymo charakteristika yra hiperbolinė. Esant prisotinimui esant didelėms srovėms Iv, charakteristika artėja prie tiesinės (2 pav.). Esant mažoms srovės Iv vertėms, sukimosi greitis smarkiai padidėja. Todėl, kai variklio sužadinimo grandinė nutrūksta (Iv \u003d 0) lygiagrečiai sužadinant, jo sukimosi greitis pasiekia nepriimtinas ribas, kaip sakoma: „Variklis veikia beprotiškai“. Išimtis gali būti mikrovarikliai, kurių tuščiosios eigos sukimo momentas yra gana didelis M0.

Ryžiai. 2. Variklio reguliavimo charakteristika
Serijiniuose sužadinimo varikliuose Iv \u003d Ia. Esant mažoms apkrovoms, armatūros srovė Ia yra maža, o sukimosi greitis gali būti per didelis, todėl paleidimas ir veikimas esant mažoms apkrovoms yra nepriimtinas. Mikrovarikliai taip pat. ankstesniu atveju gali būti išimtis.
greičio charakteristikos.
Greičio charakteristikos suteikia sukimosi greičio n priklausomybę nuo variklio veleno naudingosios galios P2, jei tinklo įtampa U ir žadinimo grandinės valdymo reostato varža rv išlieka nepakitusi, t.y. n=f(P2), su U=const ir rв = const .
Ryžiai. 3. Greičio charakteristikos
Padidėjus armatūros srovei, didėjant šunto variklio mechaninei apkrovai, tuo pačiu metu didėja įtampos kritimas armatūroje ir vyksta armatūros reakcija, kuri dažniausiai veikia išmagnetindama. Pirmoji priežastis siekia sumažinti variklio sukimosi greitį, antroji – padidinti. Įtampos kritimo armatūroje poveikis paprastai turi didesnį poveikį. Todėl lygiagretaus žadinimo variklio greičio charakteristika yra šiek tiek krentanti (1 kreivė, 3 pav.).
Serijiniame žadinimo variklyje armatūros srovė yra žadinimo srovė. Dėl to variklio su nuosekliu sužadinimo greičio charakteristika yra artima hiperboliniam greičiui. Didėjant apkrovai, kai magnetinė grandinė tampa prisotinta, charakteristika tampa aiškesnė (3 pav. 3 kreivė).
Sudėtiniame variklyje, kai apvijos įjungiamos sutartinai, greičio charakteristika užima tarpinę padėtį tarp lygiagretaus ir nuoseklaus žadinimo variklio charakteristikų (2 kreivė).
Momento charakteristikos.
Sukimo momento charakteristikos parodo, kaip keičiasi momentas M, pasikeitus variklio veleno naudingajai galiai P2, jei tinklo įtampa U ir valdymo reostato varža rv žadinimo grandinėje išlieka nepakitusi, t.y. M = f(P2) ), kai U = const, rv = const.
Naudingas momentas ant variklio veleno
Jei lygiagretaus žadinimo variklio sukimosi greitis nesikeistų su apkrova, tada momento Mmex priklausomybė nuo naudingosios galios grafiškai reikštų tiesią liniją, einančią per pradžią. Tiesą sakant, sukimosi greitis mažėja didėjant apkrovai. Todėl naudingojo momento charakteristika yra šiek tiek išlenkta į viršų (2 kreivė, 4 pav.). Šiuo atveju elektromagnetinio momento M kreivė eina virš naudingojo momento Mmex kreivės pastovia verte, lygia tuščiosios eigos momentui M0 (kreivė 1).
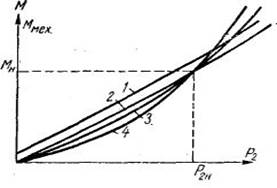
Ryžiai. 4. Momento charakteristikos
Serijinio žadinimo variklyje sukimo momento charakteristikos tipas artėja prie parabolinės, nes sukimo momento pokytis nuo apkrovos srovės vyksta pagal parabolės dėsnį tol, kol plienas yra prisotintas. Esant prisotinimui, priklausomybė tampa aiškesnė (4 kreivė). Sudėtiniame variklyje sukimo momento charakteristika (3 kreivė) užima tarpinę padėtį tarp lygiagretaus ir nuoseklaus žadinimo variklio charakteristikų.
Efektyvumo kitimo charakteristikos.
Efektyvumo priklausomybės nuo apkrovos kreivė turi visiems varikliams būdingą formą (5 pav.). Kreivė eina per pradinę vietą ir greitai auga, kai naudingoji galia padidėja iki 1/4 vardinės galios. Esant galiai P2, lygiai maždaug 2/3 vardinės galios, efektyvumas paprastai pasiekia didžiausią vertę. Kai apkrova padidėja iki nominalaus efektyvumo, ji išlieka pastovi arba šiek tiek sumažėja.
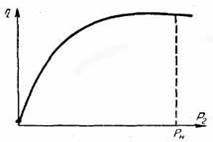
Ryžiai. 5. Variklio efektyvumo pokytis
6.2 Mechaninė charakteristika
Svarbiausia variklio charakteristika yra mechaninė n(M). Tai parodo, kaip variklio sūkiai priklauso nuo sukurto sukimo momento. Jei variklio apvijose yra įvestos vardinės įtampos, o jo grandinėse nėra papildomų rezistorių, tai variklis turi mechaninę charakteristiką, vadinamą natūralia. Ant natūralios charakteristikos yra taškas, atitinkantis vardinius variklio duomenis (M n, P i ir kt.). Jei įtampa ant armatūros apvijos yra mažesnė už vardinę, arba I in< I вн, то двигатель будет иметь различные искусственные механические характеристики. На этих характеристиках двигатель работает при пуске, торможении, реверсе и регулировании частоты вращения.
Transformuodami išraišką (3) sukimosi dažnio atžvilgiu, gauname elektromechaninės charakteristikos n(I i) lygtį:
![]() (7)
(7)
Pakeitę srovę I i (7) lygtyje pagal (1) formulę, gauname mechaninės charakteristikos n (M) lygtį:
![]() (8)
(8)
Kai Ф = const, lygiagretaus žadinimo variklio elektromechaninės n (I I) ir mechaninės n (M) charakteristikos yra tiesios. Kadangi magnetinis srautas šiek tiek keičiasi dėl armatūros reakcijos, charakteristikos iš tikrųjų šiek tiek skiriasi nuo tiesių linijų.
Kai variklis veikia tuščiąja eiga (M = 0), variklio tuščiosios eigos greitis nustatomas pagal pirmąjį (8) lygties narį. Didėjant apkrovai, n mažėja. Kaip matyti iš (8) lygties, taip yra dėl armatūros pasipriešinimo r i.
Kadangi r i nėra didelis, didėjant sukimo momentui, variklio sūkiai kinta mažai, o variklis turi standžią natūralią mechaninę charakteristiką (6 pav., charakteristika 1).
Iš (8) lygties matyti, kad yra trys būdai, kaip valdyti sukimosi greitį esant tam tikrai pastoviai apkrovai (M = const):
a) armatūros grandinės varžos pokytis;
b) variklio magnetinio srauto pokytis;
c) įtampos pokytis armatūros gnybtuose.

Ryžiai. 6 Mechaninės charakteristikos
Pirmuoju būdu valdyti sukimosi greitį armatūros grandinėje. turi būti įtraukta papildoma varža r d Tada varža (8) lygtyje turi būti pakeista r i + r d.
Kaip matyti iš (8) lygties, sukimosi greitis n yra susijęs su armatūros grandinės varža r i + r d esant pastoviai apkrovai (M = const) tiesiniu ryšiu, t.y. didėjant pasipriešinimui, greitis mažėja. Skirtingos varžos r d atitinka įvairias dirbtines mechanines charakteristikas, kurių viena parodyta 2 pav. (2 charakteristika). Naudodamiesi charakteristika 2, esant tam tikram sukimo momentui M1, galite gauti greitį n2.
Greičio keitimas antruoju būdu atliekamas naudojant reguliuojamą įtampos šaltinį UD2. Keičiant jo įtampą reguliatoriumi R2, galima pakeisti žadinimo srovę I V ir tuo pačiu variklio magnetinį srautą. Kaip matyti iš (8) lygties, esant pastoviai apkrovai (M = const), sukimosi dažnis yra kompleksiškai priklausomas nuo magnetinio srauto Ф. (8) lygties analizė rodo, kad tam tikrame magnetinio srauto diapazone Ф , pastarojo sumažėjimas padidina sukimosi dažnį. Būtent šis srauto kitimo diapazonas naudojamas greičio valdymui.
Kiekviena magnetinio srauto reikšmė atitinka dirbtinę mechaninę variklio charakteristiką, iš kurių viena parodyta 2 pav. (4 charakteristika). Naudodamiesi charakteristika 4 šiuo metu M1, galite gauti greitį n4.
Norint reguliuoti sukimosi greitį keičiant įtampą armatūros gnybtuose, būtina turėti gana galingą reguliuojamos įtampos šaltinį. Kiekviena įtampos reikšmė atitinka dirbtinę mechaninę variklio charakteristiką, iš kurių viena parodyta pav.2(3 charakteristika). Naudodamiesi charakteristika 3, esant tam tikram sukimo momentui M1, galite gauti greitį n3.
Bibliografija
1. Katsman M.M. Elektromobiliai. -M.: Aukštesnis. mokykla, 1993 m.
2. Kopylovas I.P. Elektromobiliai. -M.: Energoatomizdat, 1986 m
Nuolatinės srovės varikliai gali turėti nepriklausomą, lygiagretų, nuoseklų arba mišrų žadinimą (6.1 pav.).
Ryžiai. 6.1. Nepriklausomos nuolatinės srovės variklio grandinės ( A),
lygiagretus ( b), nuoseklus ( V) ir sumaišytas ( G) sužadinimas
(viršutinė schemos "c" dalis priklauso schemai "a")
Lygiagrečiame žadinimo variklyje lauko apvija yra lygiagrečiai sujungta su armatūros gnybtais. Bet per šią apviją tekanti srovė, skirtingai nuo armatūros srovės, nepriklauso nuo apkrovos ir yra nulemta armatūrai taikomos įtampos bei bendros sužadinimo grandinės varžos. Dėl šios priežasties šunto sužadinimo variklis taip pat vadinamas nepriklausomo sužadinimo varikliu.
Sukimo momentas M Nuolatinės srovės variklis ir jo EMF E nustatomi pagal formules
M= į F aš aš; E= kФω,
čia k yra variklio projektinis koeficientas;
Ф – magnetinis srautas, Wb;
aš i - armatūros srovė, A.
ω yra kampinis greitis, rad/s.
Elektromechaninės lygtys ω = ƒ ( aš i) ir mechaninis ω = ƒ ( M) charakteristikos turi formą
ω = U/(kF) – ( R aš + R p) / (k F) aš aš;
ω = U/(kF) – ( R aš + R p) / (iki 2 F 2) M.
Idealios tuščiosios eigos kampinis greitis (at aš i = 0 arba M = 0)
ω 0 = U/(kF).
Ant pav. 6.2 pateikiamos nuolatinės srovės variklio su nepriklausomu žadinimu (DPT NV) mechaninės charakteristikos visais darbo režimais. Variklio režimo charakteristikų taškai yra šie: idealios tuščiosios eigos taškas (ω 0, M= 0); vardinis režimo taškas (ω n, M n); trumpojo jungimo taškas (ω = 0, M = MĮ).
Mechaninės charakteristikos standumą lemia sužadinimo srautas ir inkaro grandinės varža:
β = d M/dω = - iki 2 Ф 2 / ( R aš + R p) = - Mį / ω.
Ryžiai. 6.2. Kombinuotos nuolatinės srovės variklio su nepriklausomu sužadinimu mechaninės charakteristikos
Didžiausia standumo modulio vertė atitinka natūralią mechaninę charakteristiką, nes žadinimo srovė yra lygi vardinei srovei ir valdymo varžai R p \u003d 0. Didėjant reostato varžai R p didėja mechaninės charakteristikos nuolydis, o kampinis greitis mažėja. Už nurodytą pasipriešinimo vertę R p ir vardinį sukimo momentą M n variklio kampinis greitis
ω n.r = ω 0 (1 – aš n ( R aš + R R) / U n.
Norint apskaičiuoti mechanines charakteristikas, būtina žinoti variklio armatūros varžą R i, kuris nurodytas kataloguose. Jei nėra gamyklinių duomenų, vertė R Aš randu maždaug pagal formulę
R i \u003d 0,5 (1 - ŋ n) ( U n/ aš n).
Kadangi DPT NV mechaninės charakteristikos yra paprastos, pakanka turėti du taškus joms nubraižyti:
1) ω = ω 0 ir M = 0,
2) ω = ω n (arba ω = ω n.r) ir M = M n.
DPT NV galimi šie trys elektrinio stabdymo režimai.
1. Regeneracinis stabdymas, kuris atsiranda, kai variklio sūkiai viršija idealų tuščiosios eigos greitį. Tai ekonomiškiausia, nes stabdymo energija perduodama į elektros tinklą. Šio režimo mechaninės charakteristikos yra atitinkamų II kvadranto variklio režimo charakteristikų tęsinys. Regeneracinio stabdymo metu variklio grandinė nesikeičia.
2. Dinaminis stabdymas. Variklio armatūra yra atjungta nuo tinklo ir sutrumpinta iki varžos. Šiuo atveju judančių dalių (mechanizmo ir variklio armatūros) mechaninė energija paverčiama elektros energija, kuri prarandama šiluminės energijos pavidalu inkaro grandinės varžoje. Mechaninės charakteristikos šiuo stabdymo režimu eina per pradinę vietą (6.2 pav. - linijos su trimis įpjovomis).
3. Atbulinis stabdymas atliekama dviem būdais:
1) didelio pasipriešinimo įvedimas armatūros grandinėje. Tokiu atveju variklio sukimo momentas tampa mažesnis už statinės apkrovos sukimo momentą. M Su. Variklis sustoja (taške A), o tada veikiamas sukimo momento M c pradeda suktis kita kryptimi, sukurdamas stabdymo momentą; taške B susidaro pastovi būsena. Mechaninės charakteristikos yra atitinkamų variklio režimo charakteristikų tęsinys (6.2 pav. - eilutės su keturiais serifais);
2) stabdymas pakeliui keičiant armatūros apvijos poliškumą. Variklis veikia taške 1 , po perjungimo jis persijungs į reostatinę charakteristiką taške 2. Išilgai linijos 2–3 įvyksta lėtėjimas (linija su penkiais serifais). Taške 3 variklis sustoja ir turi būti atjungtas nuo elektros tinklo, kad būtų išvengta perjungimo į variklio režimą su atvirkštine sukimosi eiga.
IN Nuolatinės srovės variklis su nuosekliu sužadinimude-niem armatūros srovė taip pat yra žadinimo srovė. Sužadinimo magnetinis srautas didėja didėjant apkrovai, dėl to kampinis greitis mažėja pagal (6.1) lygtį ir variklio mechaninė charakteristika bus minkšta (6.3 pav.). Dėl šios priežasties NV DPT gana lengvai ir sklandžiai įveikia perkrovas ir turi didelį paleidimo momentą. Šios variklio savybės leidžia jį plačiai naudoti transporto mechanizmų pavaroje. Variklio mechaninės charakteristikos gerokai sušvelnėja, kai į armatūros grandinę įvedamas reostatas (6.3 pav., linijos su viena įpjova).
Ryžiai. 6.3. Nuolatinės srovės variklio mechaninės charakteristikos
su nuosekliu sužadinimu
DPT PV neįmanoma įdiegti regeneracinio stabdymo režimo, nes jame nėra idealaus tuščiosios eigos greičio.
Dinaminis stabdymas gali būti atliekamas pagal schemą su savaiminiu sužadinimu ir su nepriklausomu sužadinimu. Pirmuoju atveju inkaras ir žadinimo apvija atjungiami nuo tinklo ir uždaromi prie reostato. Į venkite mašinos išdeginimo, reikia perjungti žadinimo apviją (arba inkarą), kad srovės kryptis žadinimo apvijoje nesikeistų. Šiuo atveju mašina savaime sužadinama esant tam tikrai armatūros grandinės varžai tik esant tam tikrai kampinio greičio vertei; susijaudinęs sukuria stabdymo momentą. Mechaninės charakteristikos yra nelinijinės (6.3 pav. - kreivės su keturiomis išpjovomis).
Variklio mechaninės charakteristikos dinaminio stabdymo su nepriklausomu žadinimu režimu yra panašios į atitinkamas variklio su nepriklausomu žadinimu charakteristikas (6.3 pav. - linijos su dviem įpjovomis). Šis stabdymo būdas buvo plačiai pritaikytas, o pirmasis metodas naudojamas retai, daugiausia kaip avarinis, pavyzdžiui, kai nutrūksta tinklo įtampa.
Stabdymas opozicijoje, kaip ir DPT NV, atliekamas dviem būdais:
1) įtraukimas į didelio pasipriešinimo armatūros grandinę;
2) keičiant armatūros apvijos poliškumą, paliekant nepakitusią srovės kryptį žadinimo apvijoje.
Pirmuoju metodu mechaninė charakteristika bus charakteristikos, atitinkančios variklio režimą, tęsinys (6.3 pav. - linija su trimis įpjovomis). Antruoju metodu stabdymas atliekamas išilgai linijos 1 –2–3 .
Nuolatinės srovės elektros pavarų greičio reguliavimas. DPT NV greitis gali būti reguliuojamas:
1) keičiant varžą armatūros grandinėje;
2) sužadinimo srauto pokytis;
3) keičiant į armatūrą tiekiamą įtampą.
reglamentas pagal pirmąjį metodą turi didelių trūkumų:
- mažėjant kampiniam greičiui mažėja mechaninių charakteristikų standumas, didėja galios nuostoliai pagrindinėje grandinėje;
- valdymo diapazonas yra ribotas, ypač esant mažoms apkrovoms;
– mažas reguliavimo lygumas ir tikslumas.
Dėl šių priežasčių tokio tipo reguliavimas retai naudojamas nuolatinės srovės pavaroje.
Autorius antras būdas galima reguliuoti magnetinį srautą tik mažėjimo kryptimi (kadangi vardiniame režime variklio magnetinė grandinė yra prisotinta), o tai atitinka greičio padidėjimą virš vardinio. Galimas greičio reguliavimo diapazonas standartiniam varikliui neviršija 2. Viršutinę greičio ribą riboja variklio armatūros elementų - armatūros apvijų tvarsčių, kolektoriaus - mechaninis stiprumas.
Pagrindinis būdas valdyti DPT NV greitį yra metodas, pagrįstas armatūrai tiekiamos įtampos keitimu, kuris atliekamas naudojant specialų reguliuojamą keitiklį. Tiristorių keitikliai dažniausiai naudojami kaip atskiri maitinimo šaltiniai. Pavaros mechaninių charakteristikų standumas pagal sistemą "keitiklis - DCT NV" yra beveik pastovus. Mechaninės charakteristikos yra lygiagrečių viena kitai tiesių linijų šeima. Reguliavimo diapazonas, lygumas ir tikslumas čia yra didesni nei naudojant kitus reguliavimo būdus. Todėl ši pavaros sistema naudojama mechanizmams, kuriems reikalingas gilus ir sklandus greičio reguliavimas.
Papildomų rezistorių skaičiavimas DPT NV armatūros grandinėje. Jei žinoma natūrali elektromechaninė arba mechaninė charakteristika 1 variklis (6.4 pav.) ir jo paso duomenys, tada varžos skaičiavimas R d, įtraukus į armatūros grandinę, norima dirbtinė charakteristika 2 eis per tašką A su nurodytomis koordinatėmis ω ir, aš ir arba ω ir, M ir, gali būti atliekami šiais dažniausiai pasitaikančiais metodais.
Ryžiai. 6.4. DPT HB charakteristikos vertei skaičiuoti
valdymo rezistoriai
Proporcinis metodas. Parašykime greičio kritimų prie srovės santykį aš ir arba momentas M ir apie natūralų Δω e bei norimą dirbtinį Δω ir charakteristikas:
Δω e / Δω u = aš Ir R aš/( aš Ir ( R aš + R e)) = R aš/( R aš + R e).
Tada norima vertė
R d = R i (Δω ir / Δω e - 1).
Segmento metodas nereikia žinoti variklio vidinės varžos vertės R i (be to, jo reikšmę galima nustatyti pagal žinomą gamtinę charakteristiką).
Parašykime variklio greičio išraišką ant duotosios dirbtinės charakteristikos (žr. 6.4 pav.) esant vardinei srovei aš n, momentas M n, magnetinis srautas F n ir įtampa U n:
ω ir = U n / (kF n) (1 - aš n R/ U n),
Kur U n / (kF n) \u003d ω 0.
ω ir = ω 0 (1 – R / R n).
Čia R n = U n/ aš n - vadinamoji nominali varža, kuri yra bazinė vertė skaičiavimuose, Ohm.
Santykis
R / U n \u003d (ω 0 – ω ir) / ω 0 \u003d δ
atspindi svarbią NV DPT savybę: santykinis greičio skirtumas δ \u003d Δω / ω 0 yra lygus santykinei armatūros grandinės aktyviajai varžai R / R n.
Pažymime pav. 6.4 būdingi taškai A, b,Su, d ir atkreipkite dėmesį, kad ω 0 – ω ir = Δω = tūzas, ω 0 = Reklama. Tada R = R n Δω / ω 0 = R n tūzas/Reklama; R d = R n bSu/Reklama; R aš = R n Ab /Reklama.
Taigi, norint rasti R d pirmiausia turite nustatyti atkarpų ilgį pagal charakteristikas bSu Ir Reklama esant vardinei srovei arba sukimo momentui ir apskaičiuoti vardinę varžą R n = U n/ aš n.
Papildomų rezistorių skaičiavimas taip pat gali būti atliekamas naudojant šias formules tam tikrai leistinai srovei aš papildomas, kuris nustatomas pagal leistino momento reikšmę M papildomos arba sąlygos užvedimui, atbuline eiga ir stabdymui.
Rezistoriaus varža R d1 pradžioje ( E = 0)
R q1 = ( U / aš papildyti) - R aš.
Rezistoriaus varža R d2 dinaminio stabdymo metu
R q2 = ( E / aš papildyti) - R aš ≈ ( U / aš papildyti) - R I).
Rezistoriaus varža R d3 važiuojant atbuline eiga arba stabdant antiperjungimo būdu
R d3 = (( U + E) / aš papildyti) - R i ≈ (2 U / aš papildyti) - R aš.
Pavyzdys . DPT NV tipo PBST-53 turi šiuos paso duomenis: R n = 4,8 kW; n n = 1500 aps./min.; U n = 220 V; aš n = 24,2 A; R i = 0,38 omo; aš v.n = 0,8 A. Būtina nustatyti:
1) rezistoriaus varža, kurios įtraukimas į variklio armatūros grandinę užtikrins dirbtinės mechaninės charakteristikos praėjimą per tašką, kurio koordinatės ω ir = 90 rad/s, M n = 25 Nm;
2) rezistorių varža, kurių įtraukimas apribos srovę paleidimo ir stabdymo metu, prieštaraudamas lygiui aš pridėti = 3 aš n.