Elektrisko piedziņu griešanās frekvences regulēšana ir viens no svarīgākajiem mūsdienu elektrotehnikas uzdevumiem. Racionālu regulēšanas metožu izstrāde un pielietošana var palielināt mehānismu veiktspēju, uzlabot produktu kvalitāti, vienkāršot piedziņas mehānisko daļu, samazināt enerģijas patēriņu utt.
Kustības atturības dēļ dzinējam ir tendence rezonēt. Jo mazāks elementārais solis, jo mazāka ir rezonanses tendence. Rezonanse ir atkarīga arī no slodzes rakstura – jo inerciālāka un mazāk biedējoša, jo lielāka ir tendence rezonēt noteiktās frekvencēs. Ārkārtējā rezonanses gadījumā motors sabojājas un apstājas vai darbojas nekontrolējami, neveicot pareizas kustības. Šāda motora darbība parasti tiek novērota tikai tad, kad tiek pārvietots pilns solis vairākās frekvencēs zem 300 Hz.
Darbojoties pusātruma un mikromanuālā režīmā, motors vienmēr seko iestatītajam ātrumam un pozīcijai, palielinot troksni un vibrācijas tā rezonanses frekvencēs. Jo augstāka ir mikroskopija, jo zemākas ir rezonanses frekvences. J: Nepieciešama mana konkrēta lietojumprogramma liels ātrums spin. Vislabāk ir eksperimentēt ar soļu komandām, sākot ar zemu vērtību un pakāpeniski palielinot frekvenci līdz vajadzīgajai vērtībai. Lūdzu, ņemiet vērā, ka pakāpeniskajai maksimālās frekvences palielināšanai ir jābūt simetriskai un pārejas procesā uz start-stop.
Ar ātruma regulēšanu nevajadzētu jaukt dabiskās elektromotora apgriezienu izmaiņas atbilstoši tā mehāniskajām īpašībām, mainoties slodzei uz piedziņas vārpstu. Regulēšana ir elektriskās piedziņas griešanās ātruma piespiedu maiņa atkarībā no piedziņas mehānisma prasībām.
Vispirms nosakiet piemērotu starta-stop frekvenci. Pēc tam palieliniet to līdz vajadzīgajai frekvencei. Ja situācija jau ir apmierinoša, pirms apstāšanās sākšanas pārliecinieties, ka frekvence vienmērīgi samazinās. Tā ir patiesība. "Trapecveida" ātruma profils. Ja rezultāti nav sasniegti ātrumā, mēģiniet.
Modulis tiek piegādāts ar augstāku spriegumu, kā norādīts iepriekš; Atcerieties, ka pēc katras kustības nākamajai ir nepieciešams papildu laiks, lai nomierinātu rotoru, kas ir milisekundes. Gaidāmajai maiņai šim laikam vajadzētu būt garākam; Izmēģiniet to pašu ar jaudīgāku velosipēdu. Pie lielākām vērtībām lielāka turēšanas strāva izraisīs lielāku motora un vadības moduļa siltumu, un var būt nepieciešama papildu piespiedu dzesēšana ar moduļa ventilatoru un pat ar motoru.
Jebkuru regulēšanas metodi raksturo šādi galvenie rādītāji:
regulēšanas diapazons - maksimālā ātruma attiecība pret minimālo, ko var iegūt piedziņā t.i. ;
regulēšanas vienmērīgums - stabilo ātrumu skaits, kas iegūts noteiktā regulēšanas diapazonā;
efektivitāte - ņemot vērā izmaksas, kas saistītas ar pašas vadības metodes izveidi, un papildu enerģijas zudumus, kas rodas piedziņā;
Maksimālais griešanās ātrums
Sazinieties ar jūsu izvēlētā vadības moduļa ražotāju! Piedziņas darbības laikā iespējamo ietaupījumu diapazons bieži ir saistīts ar slodzes griezes momenta īpašībām. Sistēmās ar fiksētu enerģijas īpašības enerģijas patēriņš ir tieši proporcionāls griezes momenta un vārpstas ātruma samazinājumam, savukārt mainīga griezes momenta lietojumos ar kvadrātveida slodzes raksturlielumiem enerģijas patēriņš mainās trešajā jaudā uz griešanās ātrumu.
piedziņas stabilitāte - rotācijas ātruma izmaiņas, mainoties griezes momentam uz motora vārpstas. Darba stabilitāti pilnībā nosaka mehānisko īpašību stingrība;
regulēšanas virziens norāda, ka ātrums mainās tikai uz leju vai tikai uz augšu no piedziņas galvenā ātruma, vai ir iespējama gan augšup, gan lejup regulēšana.
Šī iemesla dēļ mašīnu motoru ātruma regulēšana bieži vien rada jaudas ieguvumus, ko var ātri redzēt elektrības rēķinā. Tomēr vienkārša ātruma maiņa negarantē cerētos ietaupījumus. Trīsfāzu veiktspējas faktori indukcijas motori parasti tiek dota tikai par nominālo punktu. Ja motors tiek darbināts tieši no tīkla ar nominālo slodzi, tā veiktspēja ievērojami samazinās pastāvīgu mehānisko un elektromagnētisko zudumu dēļ.
Strādā ar frekvences pārveidotāji nodrošina optimālu motora magnetizāciju atkarībā no vadības metodes kvalitātes. Tāpēc, izmantojot pārveidotāju, koeficients noderīga darbība no visas spēkstacijas nekrīt tik daudz, strādājot ar mazjaudas dzinēju. Ievērojams uzlabojums parasti ir redzams motoriem, kas pārsniedz 11 kW.
Asinhronā motora rotora ātrumu nosaka pēc formulas:
kur f ir maiņstrāvas frekvence; p ir statora tinumu polu pāru skaits; s - slīdēšana.
No iepriekš minētās formulas mēs varam secināt, ka asinhronā motora ātrumu var kontrolēt, mainot vienu no trim vērtībām:
Tā rezultātā tiek samazināti strāvas kabeļu zudumi. Praktisks piemērs: līdz ar rotējošo piedziņu nodošanu ekspluatācijā ceturksnī ievērojami samazinājās palaišana un līdz ar to arī sistēmas mehāniskā slodze. Lietojumprogrammās, kurās nav strauju slodzes izmaiņu, lietotājs var pielietot automātisku enerģijas optimizāciju. Pēc tam invertors samazina motora magnetizāciju līdz optimālajam minimumam. Rezultāts ir papildu ietaupījums enerģijas patēriņā, salīdzinot ar apgrozījuma samazinājumu.
Šī funkcija labi darbojas visiem lēnajiem regulējumiem, kas parasti ir sastopami sūkņu un ventilatoru automatizācijā. Samazināti palaišanas cikli Ātruma kontrole var samazināt palaišanas reižu skaitu daudzās lietojumprogrammās. Jebkurš neregulēts elektromotora iedarbinājums prasa papildu enerģiju. Sūkņu gadījumā enerģijas patēriņš iedarbināšanai parasti ir 5-10% no kopējā patēriņa, taču ir piemēri, ka iedarbināšanai nepieciešams līdz 40% enerģijas.
paslīd;
Statora magnētiskās plūsmas p polu pāru skaits;
Statora strāvas frekvences f.
Apsvērsim iespēju regulēt rotora ātrumu, mainot slīdēšanu. Slīdēšana ir daudzu dzinēja parametru funkcija:
s = f(R1, X1;R2; X2; U),
kur R 1 X 1 - statora ķēdes aktīvā un induktīvā pretestība,; R 2 , X 2 - tas pats, rotors;
Turklāt tiek samazinātas maksimālās strāvas un mehāniskās triecienslodzes palaišanas laikā. Citas priekšrocības, ko sniedz ilgāks kalpošanas laiks, jo ir samazināts komponentu mehāniskais spriegums. Visas šīs iespējas ir pieejamas ar mūsdienu frekvences pārveidotāju iebūvētajām programmatūras funkcijām.
Optimizējot griezes momentu un rotācijas ātrumu, energoefektivitāti var palielināt daudzos konstanta griezes momenta lietojumos. Pieteikumiem ar nemainīgas īpašības slodzes griezes moments, piemēram, ar nelielām slodzes izmaiņām, mainoties rotācijas ātrumam plašākā diapazonā. Cita starpā ir ražošanas līniju konveijeri, konveijeri, lifti, maisītāji, dzirnavas.
U - motora barošanas spriegums.
No formulas var redzēt, ka, lai mainītu slīdēšanu, statora vai rotora tinumu ķēdēs var ievadīt papildu rezistorus vai induktivitātes vai samazināt motora barošanas spriegumu.
Sprieguma maiņa.
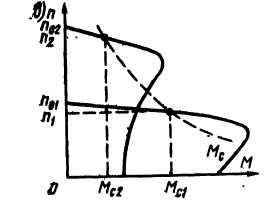
Ir zināms, ka asinhronā motora maksimālais griezes moments ir proporcionāls tīkla sprieguma kvadrātam un mehāniskie raksturlielumi pie dažādiem spriegumiem ir tādi, kādi parādīti 5.8. att., a. Šo raksturlielumu analīze kopā ar pacelšanas ierīces pretestības momenta Ms.g raksturlielumu parāda, ka ātruma regulēšana ir iespējama ļoti šaurā diapazonā. Pie 0,6 U n sprieguma dzinējs neiedarbināsies, jo Mp<Мс.г, а при снижении напряжения ниже 0,6 UB работающий двигатель остановится.
Ņemot vērā padevēja pielietojuma piemēru, kad automašīnai uzstādītais motora korpuss atrodas uz darba jostas, ir acīmredzams, ka virsbūves svars vienmēr ir vienāds neatkarīgi no tā, vai siksna kustas ātri vai lēni. Tātad laiks, kas nepieciešams šī bloka pārvietošanai, vienmēr ir vienāds. Protams, berzes un paātrinājuma laiki mainās atkarībā no ekspluatācijas apstākļiem, taču slodzes pieprasījums ir nemainīgs. Šai sistēmai nepieciešamā jauda ir proporcionāla nepieciešamajam griezes momentam un dzinēja apgriezieniem.
Ja pie nemainīgas slodzes var samazināt griešanās ātrumu, uzreiz būs redzams arī enerģijas ietaupījums. Bieži vien uz lentes pārvadāto preču daudzums nav nemainīgs. Ja lentes ātrums atbilst pārvadājamā materiāla daudzumam, tas nodrošinās ne tikai vienmērīgu un nepārtrauktu transportēšanu, bet arī nepieciešamo enerģiju. Tomēr, ja ātruma regulēšana nav iespējama vai vēlama, lielākajai daļai frekvences pārveidotāju var ietaupīt enerģiju. Tie regulē motora izejas spriegumu atkarībā no slodzes.
Nedaudz vēlams vadīt motoru, kas rotē mehānismu ar ventilatora pretestības momentu Ms.v - vadības diapazons paplašinās.
Mainot parametrus R 1 , X 1 , X 2 .
Šo parametru palielināšanai ir gandrīz tāda pati ietekme uz motora mehāniskajām īpašībām kā sprieguma samazināšanās, un pretestības R 1 palielināšanās palielina arī enerģijas zudumus statora ķēdē.
Slodze palielinās, palielinoties spriegumam. Šīs vadības kvalitāti nosaka invertora kvalitāte. Tomēr ar to pašu enerģijas ietaupījumu, ko varat iegūt ar šo funkciju, nepietiek, lai attaisnotu ieguldījumu frekvences pārveidotājā. Pie samazināta griešanās ātruma enerģijas nepieciešamība tiek samazināta atkarībā no trešās jaudas; Frekvences pārveidotāju izmantošana ventilatoru un centrbēdzes sūkņu vadīšanai daudzos gadījumos ir samazināta mazāk nekā divu gadu laikā.
Sūkņu un ventilatora ātruma kontroles sistēmas ir visizplatītākās pielietojums mainīga griezes momenta piedziņām ar kvadrātveida raksturlielumiem. Tomēr sūkņu gadījumā ir svarīgi atšķirt plaši izmantotos perifēros sūkņus ar mainīgu griezes momenta raksturlielumiem no ekscentriskajiem, vakuuma vai pozitīvā darba tilpuma sūkņiem, kuriem ir nemainīga griezes momenta slodze.
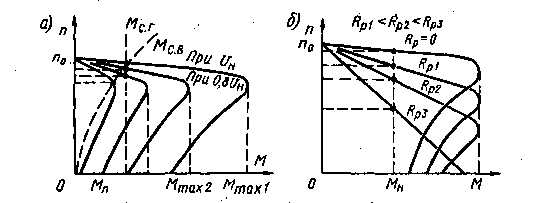
5.8. att. Asinhronā motora mehāniskie raksturlielumi mainot
rotora ķēdes spriegums un pretestība
50. gadu beigās zināmu sadalījumu ieguva tā sauktā droseļvārsta elektriskā piedziņa, kurā tika panākts pretestības pieaugums X 1, statora ķēdē iekļaujot magnētisko pastiprinātāju (piesātinājuma induktors). Galvenais šādu elektrisko piedziņu trūkums (arī mainoties spriegumam U) ir tas, ka slīdošā jauda rotorā pilnībā pārvēršas siltumā, palielinot motora pārkaršanu. Droseles piedziņās samazinās arī jaudas koeficients cosf.
Sūkņu un ventilatoru skaits ir milzīgs. Aptuveni 70% no rūpnieciskiem mērķiem izmantotās enerģijas visā Eiropas Savienībā ir elektromotori, savukārt sūkņi un ventilatori veido aptuveni 37%. Vienkāršs, bet ļoti efektīvs veids, kā ietaupīt enerģiju mainīga ātruma mašīnās, ir ātruma kontrole. Pie samazināta griešanās ātruma enerģijas pieprasījums tiek samazināts līdz trešajai jaudai. Šis augstais izmaksu efektivitātes potenciāls padara visas kvadrātmetru lietojumprogrammas ideāli piemērotas energoefektivitātes analīžu veikšanai.
Papildus sūkņa un sistēmas raksturlielumiem raksturlīkne kopā ar sūkņa un sistēmas raksturlielumiem parāda arī vairākas efektivitātes līknes; Gan droseles, gan ātruma regulēšanā darbības punkts ir ārpus optimālā efektivitātes koeficienta.
No iepriekš minētā izriet, ka parametru R 1 X 1 X 2 palielināšana vai U samazināšanās ne tikai ātruma kontroles dēļ, bet arī dažu citu iemeslu dēļ (piemēram, tīkla parametru ietekme) ļoti nevēlams asinhronajam motoram.
Rotora ķēdes aktīvās pretestības maiņa.
Vienīgais asinhronā motora parametrs, no kura nav atkarīgs maksimālais motora griezes moments, ir pretestība R 2. . Līdz ar to, rotora ķēdē ievadot papildu rezistorus, tiek saglabāta motora mehāniskā pārslodzes spēja un, kas ir ļoti svarīgi, enerģijas zudumi tiek atbrīvoti galvenokārt uz rezistoriem, t.i., ārpus motora.
Lai izvairītos no pārsteigumiem, iestatot sūkņu un ventilatoru ātrumu, lietotājam jau projektēšanas stadijā ir jāatceras, ka pārslēgšanas ātrums maina arī darbības punktu un līdz ar to plūsmas iekārtas lietderības koeficientu. Plūsmas mašīnas montāža un mainīga ātruma mainīga ātruma piedziņa ir sistēma, kas taupa enerģiju. Ja starpība starp maksimālo jaudu un vidējo darba slodzi ar nepietiekamu motoru ir pārāk liela, kaskādes sistēma ir labs risinājums.
Šī metode ir piemērojama tikai motoriem ar fāzes rotoru un gredzeniem. Ir gandrīz neiespējami mainīt vāveres būra rotora pretestību. Mehāniskie raksturlielumi dažādām rotoru pretestībām parādīti 5.8. att., b.
Īsumā regulēšanas process ir šāds: M=Ms, n=const;  -
- -
- -
- -
- -
- -
- -
- .Ieraksts ir izskaidrots ar formulām (2-6).
.Ieraksts ir izskaidrots ar formulām (2-6).
Tāpat, pārstrukturējot esošu sistēmu, šādas investīcijas pēc neilga laika atgriežas. Kaskādes sistēmā ātruma regulēšanas sūknis nodrošina pamata pieprasījumu. Tiklīdz pieprasījums palielinās, frekvences pārveidotājs pārslēdzas uz nākamo sūkni. Tādā veidā sūkņi strādā optimāli ar optimālu efektivitāti. Sūkņa vadība vienmēr nodrošina vislabāko sistēmas izmantošanu enerģijas ziņā. To pašu dizainu var līdzīgi pielietot ventilatora komplektam.
Atkarībā no ražotāja un versijas kaskādes vadības ierīces jau ir iebūvētas pārveidotājā vai ir pieejamas kā ārējie moduļi. Līkne parāda izvēlētā sūkņa jaudas patēriņu pie ātruma regulēšanas - pie mazāk nekā 32 Hz papildu sūkņa zudumi atsver ietaupījumus; Prezentētajā ierīcē optimālā enerģijas frekvence ir 38 Hz - ja sūknim nebūtu ātruma kontroles, enerģijas bilance būtu daudz sliktāka.
No regulēšanas diapazona, gluduma, efektivitātes viedokļa šī metode ir līdzīga līdzstrāvas motora ātruma regulēšanai, mainot armatūras ķēdes pretestību. To izmanto Andižānas un Povenets kuģu vējstieņa un stūres elektriskajās piedziņās.
Izmaiņas stabu pāru skaitā.
Asinhronie motori, kuros trīsfāzu statora tinums var radīt rotējošu magnētisko lauku ar atšķirīgu polu pāru skaitu,
Lielākajā daļā sūkņu vai ventilācijas sistēmu tiek izmantoti vārsti, žalūzijas, droseļvārsti vai trīsceļu vārsti, lai kontrolētu spiedienu vai plūsmu. Ja rotācijas sūkņa vadību kontrolē droseļvārsts, darba punkts pārvietojas pa sūkņa darbības līkni.
Nepieciešams minimāls vajadzīgās enerģijas samazinājums salīdzinājumā ar nepieciešamību sūkņa nominālajā darba punktā. Regulējot sūkņa jaudu, mainot griešanās ātrumu, darba punkts pārvietojas pa sistēmas līkni. Izmantojot šo vadības metodi, enerģijas pieprasījums samazinās līdz trešajai pakāpei salīdzinājumā ar droseles vadību! Piemēram, sūknim ir nepieciešama puse no rotācijas ātruma, kas ir tikai viena astotā daļa no enerģijas patēriņa.
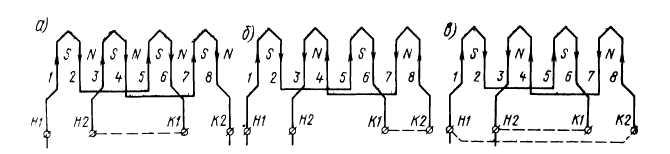
5.9.att. Diagramma, kas izskaidro polu komutācijas iegūšanas principu
sauc par polu pārslēdzamiem. Ir izstrādāti trīsfāzu tinumi, kurus var pārslēgt uz dažādu polu pāru skaitu attiecībās: 2:1, 5:2, 7:3, 3:1 utt.
Izskaidrosim polu komutācijas tinuma izveides principu, izmantojot astoņās rievās ieliktas vienfāzes tinuma piemēru. Tinums sastāv no diviem pustinumiem. Ja pustinumi ir savienoti virknē, tas ir, džemperis atradīsies starp spailēm K 1 un H 2 (5.9. att., a), tad šāds tinums izveidos četrus polu pārus (p = 4). Tinuma izveidoto stabu skaitu var atrast, norādot tajā esošās strāvas virzienu un piemērojot karkasa likumu, lai noteiktu spēka līniju virzienu ap spraugām.
Ja pustinumi ir savienoti viens pret otru, t.i. džemperis starp spailēm K 1 un K 2 (9. att., b), tad šāds tinums radīs divus stabu pārus (p \u003d 2). Ar atlasīto strāvas virzienu lauks starp slotiem 2 un 3, 4 un 5, 6 un 7, 8 un 1 viens otru atceļ.
Pustinumus var savienot ar aizmuguri pret aizmuguri, t.i. džemperi starp spailēm H 1 un K 2, H 2 un K 1 (9. att., c), tad tinums radīs arī divus stabu pārus (p = 2).
Tādējādi ir divi veidi, kā pārslēgt tinumu uz mazāku skaitu polu pāru proporcijā 2:1. Pirmā metode ir pārslēgšanās no pustinumu seriālā savienojuma uz antiseriālo savienojumu, otrā metode ir pārslēgšana no seriālā savienojuma uz antiparalēlo savienojumu. Apsveriet katru metodi saistībā ar trīsfāzu motora tinumu.
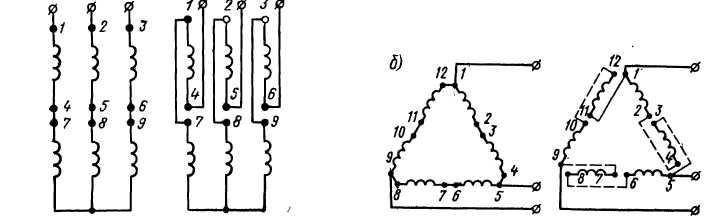
Ar pirmo komutācijas metodi tinumam, kas savienots ar zvaigzni, uz vairoga jābūt 9 spailēm (5.10. att., a), un, ja tas ir savienots ar trīsstūri, 12 spailēm (5.10. att., b). Pēc pārslēgšanas tinumu savienojuma raksturs nemainās, tas ir, zvaigzne pārslēdzas uz zvaigzni, bet trīsstūris - uz trīsstūri.
Dzinēja jauda pirmajā pārslēgšanas metodē paliek nemainīga, tāpēc mainās nominālais un maksimālais motora griezes moments. Dzinēja un dažādu mehānismu mehānisko īpašību kopīgs apsvērums (5.10. att., c) parāda, ka šī pārslēgšanas metode ir vispiemērotākā metāla griešanas darbgaldu ātruma regulēšanai.
Jūras pacelšanas ierīču elektriskajās piedziņās plaši tiek izmantoti trīs ātrumu asinhronie motori ar trim atsevišķiem tinumiem uz statora dažādam polu pāru skaitam.
Otrajā komutācijas metodē ar zvaigzni savienotajam tinumam ir tikai 6 vadi (5.11. att., a). Pēc pārslēgšanas tiek iegūts dubultās zvaigznes tinuma savienojums. Motora jauda šajā gadījumā tiek dubultota, un nominālais griezes moments paliek nemainīgs.
Kopīga dzinēja un dažādu mehānismu mehānisko īpašību apskate (5.11. att., b) parāda, ka kravas pacelšanas ierīču rotācijas ātruma regulēšanai ir ieteicams izmantot otro pārslēgšanas metodi.
Ja tinums ir savienots trīsstūrī, tad pēc pārslēgšanas pēc otrās metodes tiek iegūts dubultās zvaigznes savienojums. Dzinēja jauda palielināta par 15%.
Tiek apskatīti vienkāršākie tinumu pārslēgšanas veidi, kas dod divus ātruma pakāpienus. Ar sarežģītāku trīsfāzu tinuma pārslēgšanu jūs varat iegūt trīs vai pat četrus ātruma soļus ar lielāko daļu. dažādas stabu attiecības. Piemēram, MAP sērijas sadzīves motoriem ar vienu trīsfāzu tinumu ir trīs ātrumi (MAP-42/8-4-2, jauda 0,8/1, 8/2 kW, rotācijas ātrums 700/1400/2800 apgr./min.) ( MAP-52/8-6-4-2, jauda 1,2/2,5/3/4 kW, griešanās ātrums 460/700/920/1440 apgr./min.). Vairāk nekā četri ātrumi praksē nenotiek, jo tinums un tā pārslēgšana ir daudz sarežģītāka. Dzinējam MAP-52/8-6-4-2 spaiļu panelī ir 22 pievadi.
Jūras pacelšanas ierīču elektriskajās piedziņās plaši tiek izmantoti trīs ātrumu asinhronie motori ar trim atsevišķiem tinumiem uz statora dažādam polu pāru skaitam. Rotācijas biežums
Att.5.10. Pirmais veids, kā pārslēgt trīsfāzu tinumu, kas savienots ar zvaigzni,
un trīsstūris, un attiecīgie asinsspiediena mehāniskie raksturlielumi.
tiek regulēts, ieslēdzot vienu vai otru tinumu, bet paši tinumi nepārslēdzas.
Iekšzemes rūpniecība ražo MAP sērijas daudzpakāpju asinhronos motorus kuģu elektriskajām piedziņām, kuru ātruma regulēšanas diapazons ir 6: 1 vai 7: 1. Pirmajā ātruma tinumā parasti ir 26 vai 28 stabi.
Polu pāru komutācijas regulēšana ir ļoti ekonomiska, jo rotors griežas ar vienmērīgu frekvenci ar slīdēšanu nominālajā diapazonā un motora ķēdē nav iekļauti papildu rezistori. Šīs metodes nopietns trūkums ir gradācija un ierobežotais ātrumu skaits.
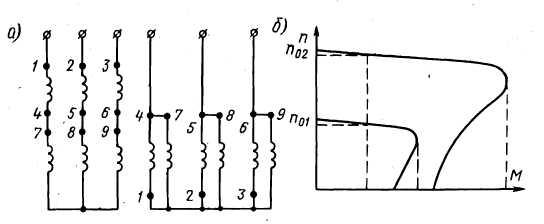
5.11.att. Otrs veids, kā pārslēgt trīsfāzu tinumu, kas savienots ar zvaigzni, un
asinhronā motora atbilstošās mehāniskās īpašības
Rotācijas ātruma regulēšana, mainot barošanas tīkla strāvas frekvenci (frekvences regulēšana).
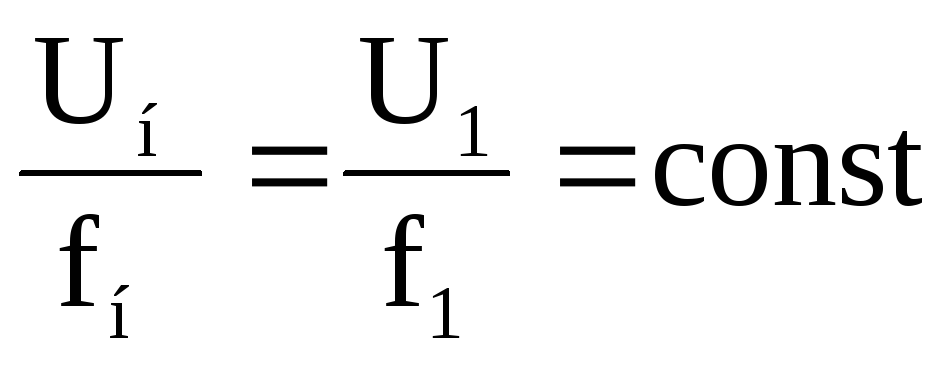
Šīs vadības metodes pamatā ir sinhronā ātruma n 0 maiņa, kas ir proporcionāla strāvas frekvencei statora tinumā. Šim regulējumam ir nepieciešams mainīgas frekvences barošanas avots f. Kā avots tiek izmantoti elektromagnētiskie un pusvadītāju frekvences pārveidotāji. Tomēr jāpatur prātā, ka vienlaikus ar barošanas sprieguma f frekvences maiņu mainīsies arī motora maksimālais elektromagnētiskais griezes moments. Tāpēc, lai uzturētu motora pārslodzes jaudu, jaudas koeficientu un efektivitāti vajadzīgajā līmenī, vienlaikus ar frekvences maiņu f. jāmaina tīkla spriegums U, lai to attiecība paliktu nemainīga:
 ;
;
Frekvences kontrole ļauj vienmērīgi mainīt dzinēju apgriezienus plašā diapazonā (līdz 12:1).
Ātruma kontrole, mainot pašreizējo frekvenci, ir racionālākais un ekonomiskākais veids. Tās galvenās priekšrocības:
Tiek izmantots parasts vāveres būra motors;
Regulēšana motora zudumu ziņā ir ekonomiska;
Tiek panākts liels regulēšanas diapazons un vienmērīgums;
Tiek saglabāta mehānisko īpašību stingrība un līdz ar to arī piedziņas stabilitāte;
Reģeneratīvo bremzēšanu var veikt gandrīz līdz pilnīgai apstāšanās brīdim.
Tajā pašā laikā ir zināms, ka kuģa spēkstacijas pašreizējā frekvence tiek uzturēta nemainīga un ir nepieciešams atsevišķs frekvences pārveidotājs, lai kontrolētu dzinēja apgriezienus.
Mūsdienīga frekvences vadīta elektriskā piedziņa sastāv no asinhronā jeb sinhronā elektromotora un frekvences pārveidotāja (5.12. att.).
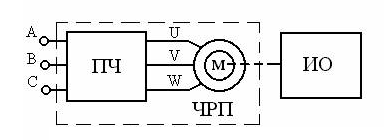
5.12. att. Mainīgas frekvences piedziņa
Frekvences pārveidotājs darbina elektromotoru un ir elektroniska statiska ierīce. Pārveidotāja izejā tiek ģenerēts elektriskais spriegums ar mainīgu amplitūdu un frekvenci. Nosaukums "mainīgas frekvences elektriskā piedziņa" ir saistīts ar faktu, ka motora ātruma regulēšana tiek veikta, mainot barošanas sprieguma frekvenci, kas tiek piegādāta motoram no frekvences pārveidotāja.
Pēdējo gadu laikā uz kuģiem ir plaši un veiksmīgi ieviesta frekvences vadīta elektropiedziņa gan dažādu tehnoloģisku problēmu risināšanai, gan elektropiedziņas sistēmās. Tas galvenokārt ir saistīts ar frekvenču pārveidotāju izstrādi un izveidi, pamatojoties uz principiāli jaunu elementu bāzi, galvenokārt uz IGBT izolētu vārtu bipolāriem tranzistoriem.
Sinhronā elektromotorā rotora ātrums līdzsvara stāvoklī ir vienāds ar statora magnētiskā lauka ātrumu.
Asinhronajā elektromotorā rotora ātrums līdzsvara stāvoklī atšķiras no ātruma ar slīdēšanas lielumu.
Magnētiskā lauka rotācijas frekvence ir atkarīga no barošanas sprieguma frekvences. Kad elektromotora statora tinumu piegādā ar trīsfāzu spriegumu ar frekvenci, tiek izveidots rotējošs magnētiskais lauks. Šī lauka rotācijas ātrumu nosaka pēc labi zināmās formulas
kur ir statora polu pāru skaits.
Pāreju no lauka rotācijas ātruma, ko mēra radiānos, uz griešanās frekvenci, kas izteikta apgriezienos minūtē, veic saskaņā ar šādu formulu
kur 60 ir kategorijas konversijas koeficients.
Aizvietojot lauka rotācijas ātrumu šajā vienādojumā, mēs iegūstam to
Tādējādi sinhrono un asinhrono motoru rotora ātrums ir atkarīgs no barošanas sprieguma frekvences.
Frekvences regulēšanas metode ir balstīta uz šo atkarību.
Mainot frekvenci ar pārveidotāju pie motora ieejas mēs regulējam rotora ātrumu.
Visizplatītākajā frekvences vadītajā piedziņā, kuras pamatā ir asinhronie vāveres dzinēji, tiek izmantota skalārā un vektora frekvences vadība.
Ar skalāro vadību saskaņā ar noteiktu likumu tie maina motoram pievadītā sprieguma amplitūdu un frekvenci. Barošanas sprieguma frekvences maiņa izraisa novirzi no aprēķinātajām motora maksimālā un starta griezes momenta vērtībām, efektivitātes, jaudas koeficienta. Tāpēc, lai saglabātu nepieciešamos dzinēja darbības raksturlielumus, vienlaikus ir jāmaina sprieguma amplitūda ar frekvences izmaiņām.
Esošajos frekvences pārveidotājos ar skalāro vadību motora maksimālā griezes momenta attiecība pret pretestības momentu uz vārpstas visbiežāk tiek uzturēta nemainīga. Tas ir, mainoties frekvencei, sprieguma amplitūda mainās tā, ka maksimālā motora griezes momenta attiecība pret pašreizējo slodzes griezes momentu paliek nemainīga. Šo attiecību sauc par motora pārslodzes jaudu.
Ar pastāvīgu pārslodzes jaudu, nominālās jaudas koeficientu un efektivitāti dzinējs visā ātruma kontroles diapazonā praktiski nemainās.
Dzinēja radīto maksimālo griezes momentu nosaka šāda attiecība
kur ir nemainīgs koeficients.
Tāpēc barošanas sprieguma atkarību no frekvences nosaka elektromotora vārpstas slodzes raksturs.
Pastāvīgam slodzes griezes momentam tiek saglabāta attiecība U/f = const, un faktiski maksimālais motora griezes moments ir nemainīgs. Barošanas sprieguma atkarības no frekvences raksturs gadījumam ar nemainīgu slodzes griezes momentu ir parādīts attēlā. 5.13(a). Taisnas līnijas slīpuma leņķis grafikā ir atkarīgs no pretestības momenta vērtībām un motora maksimālā griezes momenta.
Tajā pašā laikā zemās frekvencēs, sākot no noteiktas frekvences vērtības, maksimālais motora griezes moments sāk kristies. Lai to kompensētu un palielinātu palaišanas griezes momentu, tiek izmantots barošanas sprieguma līmeņa paaugstinājums.
Ventilatora slodzes gadījumā tiek realizēta atkarība U/f 2 = const. Barošanas sprieguma atkarības no frekvences raksturs šajā gadījumā ir parādīts 5.13 (b) attēlā.
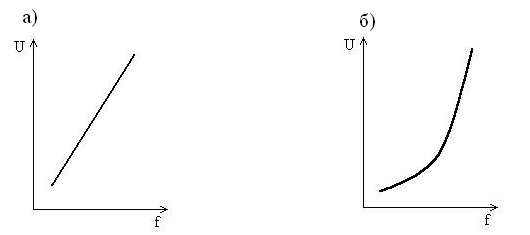
5.13. att. Barošanas sprieguma atkarības raksturs no frekvences gadījumam:
a) ar nemainīgu slodzes griezes momentu
b) ar ventilatora slodzes griezes momentu
Regulējot zemo frekvenču reģionā, samazinās arī maksimālais griezes moments, taču šāda veida slodzei tas nav kritiski.
Izmantojot maksimālā griezes momenta atkarību no sprieguma un frekvences, ir iespējams attēlot U pret f jebkura veida slodzei.
Svarīga skalārās metodes priekšrocība ir iespēja vienlaicīgi vadīt elektromotoru grupu.
Skalārā kontrole ir pietiekama lielākajai daļai mainīgas frekvences piedziņas praktisko lietojumu ar motora ātruma regulēšanas diapazonu līdz 1:40.
vektora kontroleļauj ievērojami palielināt vadības diapazonu, vadības precizitāti, palielināt elektriskās piedziņas ātrumu. Šī metode nodrošina tiešu motora griezes momenta kontroli.
Griezes momentu nosaka statora strāva, kas rada aizraujošu magnētisko lauku. Izmantojot tiešu griezes momenta vadību, papildus statora strāvas amplitūdai un fāzei ir jāmaina, tas ir, strāvas vektors. Tas ir iemesls terminam "vektoru kontrole".
Lai kontrolētu strāvas vektoru un līdz ar to statora magnētiskās plūsmas stāvokli attiecībā pret rotējošo rotoru, jebkurā laikā ir jāzina precīza rotora pozīcija. Problēma tiek atrisināta vai nu ar attālināta rotora pozīcijas sensora palīdzību, vai arī nosakot rotora stāvokli, aprēķinot citus dzinēja parametrus. Kā šie parametri tiek izmantoti statora tinumu strāvas un spriegumi.
VFD ar vektora vadību bez ātruma atgriezeniskās saites sensora ir lētāks, bet vektora kontrolei ir nepieciešams liels daudzums un liels aprēķinu ātrums no frekvences pārveidotāja.
Turklāt, lai tieši kontrolētu griezes momentu pie zemiem, tuvu nullei griešanās ātrumiem, frekvences vadītas elektriskās piedziņas darbība bez ātruma atgriezeniskās saites nav iespējama.
Vektorvadība ar ātruma atgriezeniskās saites sensoru nodrošina vadības diapazonu līdz 1:1000 un lielāku, ātruma regulēšanas precizitāte - procenta simtdaļas, griezes momenta precizitāte - daži procenti.
Frekvences pārveidotājs ir ierīce, kas paredzēta, lai vienas frekvences maiņstrāvu (spriegumu) pārveidotu par citas frekvences maiņstrāvu (spriegumu).
Mūsdienu pārveidotāju izejas frekvence var atšķirties plašā diapazonā un būt gan augstāka, gan zemāka par tīkla frekvenci.
Jebkura frekvences pārveidotāja ķēde sastāv no jaudas un vadības daļām. Pārveidotāju jaudas daļa parasti tiek izgatavota uz tiristoriem vai tranzistoriem, kas darbojas elektroniskā slēdža režīmā. Vadības daļa tiek izpildīta uz digitālajiem mikroprocesoriem un nodrošina jaudas elektronisko atslēgu vadību, kā arī lielu skaitu palīguzdevumu risināšanu (kontrole, diagnostika, aizsardzība).
Frekvences pārveidotājus, ko izmanto vadāmajās elektriskajās piedziņās, atkarībā no spēka agregāta struktūras un darbības principa iedala divās klasēs:
1. Frekvences pārveidotāji ar izteiktu starpposmu līdzstrāvas saiti.
2. Frekvences pārveidotāji ar tiešu pieslēgumu (bez starpposma līdzstrāvas posma).
Katrai no esošajām pārveidotāju klasēm ir savas priekšrocības un trūkumi, kas nosaka katras no tām racionālas pielietošanas jomu.
Pārveidotājiem ar tiešu pieslēgumu (5.14. att.) barošanas daļa ir vadāms taisngriezis un tiek izgatavots uz nebloķējamiem tiristoriem. Vadības sistēma pēc kārtas atbloķē tiristoru grupas un savieno motora statora tinumus ar elektrotīklu.
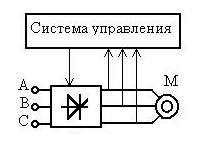
Rīsi. 5.14 Frekvences pārveidotājs ar tiešu savienojumu
Tādējādi pārveidotāja izejas spriegums veidojas no ieejas sprieguma sinusoīdu "nogrieztajām" sekcijām. 5.15. attēlā parādīts izejas sprieguma ģenerēšanas piemērs vienai no slodzes fāzēm.
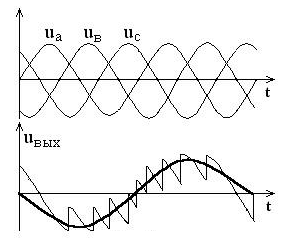
5.15. att. Izejas sprieguma veidošanās vienai no slodzes fāzēm
Pārveidotāja ieejā darbojas trīsfāzu sinusoidālais spriegums u a, u v, u s. Izejas spriegumam u out ir nesinusoidāla "zāģa zoba" forma, ko nosacīti var tuvināt ar sinusoīdu (biezu līniju). No attēla redzams, ka izejas sprieguma frekvence nevar būt vienāda vai lielāka par barošanas tīkla frekvenci. Tas ir diapazonā no 0 līdz 30 Hz. Rezultātā neliels motora apgriezienu kontroles diapazons (ne vairāk kā 1:10). Šis ierobežojums neļauj izmantot šādus pārveidotājus mūsdienu frekvences vadāmās piedziņās ar plašu tehnoloģisko parametru kontroles klāstu.
Nebloķējamo tiristoru izmantošanai ir nepieciešamas salīdzinoši sarežģītas vadības sistēmas, kas palielina pārveidotāja izmaksas.
“Nogrieztais” sinusoidālais vilnis pie pārveidotāja izejas ir augstāku harmoniku avots, kas rada papildu zudumus elektromotorā, elektromašīnas pārkaršanu, griezes momenta samazināšanos un ļoti spēcīgus traucējumus barošanas tīklā. Kompensācijas ierīču izmantošana palielina izmaksas, svaru, izmērus un samazina efektivitāti. sistēmas kopumā.
Kopā ar uzskaitītajiem tieši savienoto pārveidotāju trūkumiem tiem ir noteiktas priekšrocības. Tie ietver:
Praktiski augstākā efektivitāte salīdzinājumā ar citiem pārveidotājiem (98,5% un vairāk),
Spēja strādāt ar augstiem spriegumiem un strāvām, kas ļauj tos izmantot jaudīgos augstsprieguma piedziņās,
Relatīvais lētums, neskatoties uz absolūto izmaksu pieaugumu vadības ķēžu un papildu aprīkojuma dēļ.
Līdzīgas pārveidotāju shēmas tiek izmantotas vecajos piedziņās, un jauni dizaini praktiski nav izstrādāti.
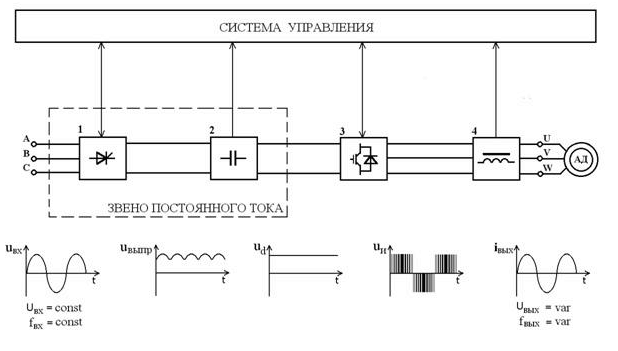
Mūsdienu mainīgās frekvences piedziņās visplašāk izmantotie ir pārveidotāji ar izteiktu līdzstrāvas saiti (5.16. att.).
Šīs klases pārveidotājos tiek izmantota dubultā elektriskās enerģijas pārveidošana: ieejas sinusoidālais spriegums ar nemainīgu amplitūdu un frekvenci tiek iztaisnots taisngriežā (V), filtrēts ar filtru (F), izlīdzināts un pēc tam atkārtoti pārveidots ar invertoru (I). ) mainīgas frekvences un amplitūdas maiņspriegumā. Divkārša enerģijas pārveidošana noved pie efektivitātes samazināšanās. kā arī svara un izmēra rādītāju pasliktināšanās attiecībā pret pārveidotājiem ar tiešu savienojumu.
Attēls 5.16 Frekvences pārveidotājs ar līdzstrāvas saiti
Lai izveidotu sinusoidālu maiņspriegumu, tiek izmantoti autonomie sprieguma invertori un autonomie strāvas invertori.
Kā elektroniskie slēdži invertoros tiek izmantoti slēdzamie tiristori GTO un to uzlabotās modifikācijas GCT, IGCT, SGCT un izolēto vārtu bipolārie tranzistori IGBT.
Tiristoru frekvences pārveidotāju galvenā priekšrocība, tāpat kā tiešā savienojuma ķēdē, ir spēja strādāt ar lielu strāvu un spriegumu, vienlaikus izturot nepārtrauktu slodzi un impulsu efektus.
Viņiem ir augstāka efektivitāte (līdz 98%) salīdzinājumā ar pārveidotājiem uz IGBT tranzistoriem (95 - 98%).
Uz tiristoriem balstīti frekvences pārveidotāji pašlaik ieņem dominējošu stāvokli augstsprieguma piedziņā jaudas diapazonā no simtiem kilovatu līdz desmitiem megavatu ar izejas spriegumu 3-10 kV un augstāku. Tomēr to cena par izejas jaudas kW ir augstākā augstsprieguma pārveidotāju klasē.
Vēl nesen frekvences pārveidotāji uz GTO bija galvenā zemsprieguma mainīgās frekvences piedziņas daļa. Bet līdz ar IGBT tranzistoru parādīšanos notika “dabiskā atlase”, un mūsdienās uz tiem balstītie pārveidotāji ir vispāratzīti līderi zemsprieguma mainīgas frekvences piedziņas jomā.
Tiristors ir daļēji vadāma ierīce: lai to ieslēgtu, pietiek ar īsu impulsu uz vadības izeju, bet, lai to izslēgtu, tam vai nu jāpieliek reversais spriegums vai jāsamazina pārslēgtā strāva līdz nullei. Tam ir nepieciešama sarežģīta un apgrūtinoša tiristoru frekvences pārveidotāja vadības sistēma.
Izolētie vārtu bipolārie tranzistori IGBT atšķiras no tiristoriem ar pilnu vadāmību, vienkāršu mazjaudas vadības sistēmu, visaugstāko darba frekvenci
Rezultātā uz IGBT balstīti frekvences pārveidotāji ļauj paplašināt motora ātruma regulēšanas diapazonu un palielināt piedziņas ātrumu kopumā.
Asinhronai vektora vadītai piedziņai IGBT pārveidotāji ļauj darboties ar mazu ātrumu bez atgriezeniskās saites sensora.
IGBT izmantošana ar augstāku pārslēgšanas frekvenci kopā ar mikroprocesora vadības sistēmu frekvences pārveidotājos samazina tiristoru pārveidotājiem raksturīgo augstāko harmoniku līmeni. Tā rezultātā ir mazāki papildu zudumi elektromotora tinumos un magnētiskajā ķēdē, samazinās elektriskās mašīnas sildīšana, samazinās griezes momenta viļņi un tiek izslēgta tā sauktā rotora "staigāšana". zemfrekvences reģionā. Tiek samazināti zudumi transformatoros, kondensatoru bankās, palielināts to kalpošanas laiks un vadu izolācija, samazināts aizsargierīču viltus trauksmes un indukcijas mērinstrumentu kļūdu skaits.
Pārveidotāji, kuru pamatā ir IGBT tranzistori, salīdzinot ar tiristoru pārveidotājiem ar vienādu izejas jaudu, ir mazāki pēc izmēra, svara, ir palielināta uzticamība elektronisko slēdžu modulārās konstrukcijas dēļ, labāka siltuma noņemšana no moduļa virsmas un mazāk konstrukcijas elementu.
Tie nodrošina pilnīgāku aizsardzību pret pārsprieguma strāvu un pārspriegumu, kas ievērojami samazina atteices un piedziņas bojājumu iespējamību.
Šobrīd zemsprieguma IGBT pārveidotājiem ir augstāka cena par izejas jaudas vienību tranzistoru moduļu ražošanas relatīvās sarežģītības dēļ. Tomēr cenas / kvalitātes attiecības ziņā, pamatojoties uz uzskaitītajām priekšrocībām, tie nepārprotami pārspēj tiristoru pārveidotājus, turklāt pēdējo gadu laikā ir vērojams stabils IGBT moduļu cenu kritums.
Galvenais šķērslis to izmantošanai augstsprieguma piedziņās ar tiešu frekvences pārveidi un jaudām virs 1 - 2 MW šobrīd ir tehnoloģiskie ierobežojumi. Pārslēgšanas sprieguma un darba strāvas palielināšanās palielina tranzistora moduļa izmēru, kā arī prasa efektīvāku siltuma atdalīšanu no silīcija kristāla.
Jaunās bipolāro tranzistoru ražošanas tehnoloģijas ir vērstas uz šo ierobežojumu pārvarēšanu, un solījums izmantot IGBT ir ļoti augsts arī augstsprieguma piedziņās. Pašlaik IGBT tranzistori tiek izmantoti augstsprieguma pārveidotājos vairāku sērijveidā savienotu atsevišķu moduļu veidā.
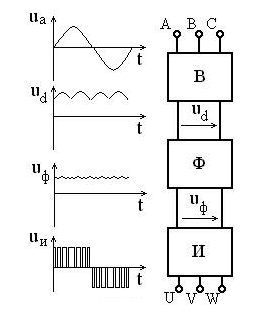
Tipiska zemsprieguma IGBT frekvences pārveidotāja diagramma ir parādīta attēlā. 5.17 Attēla apakšā ir grafiki ar spriegumiem un strāvām pie katra pārveidotāja elementa izejas.
Barošanas tīkla maiņspriegums (u in) ar nemainīgu amplitūdu un frekvenci (U in = const, f in = const) tiek piegādāts vadāmam vai nekontrolējamam taisngriezim (1).
Filtru (2) izmanto, lai izlīdzinātu rektificētā sprieguma (u rect.) viļņus. Taisngriezis un kapacitatīvā filtrs (2) veido līdzstrāvas saiti.
No filtra izejas pastāvīgs spriegums u d tiek padots uz autonomā impulsa invertora (3) ieeju.
Mūsdienu zemsprieguma pārveidotāju autonomais invertors, kā minēts, ir balstīts uz jaudas bipolāriem tranzistoriem ar izolētu aizbīdni IGBT. Attiecīgajā attēlā kā visplašāk izmantotā parādīta frekvences pārveidotāja ķēde ar autonomu sprieguma invertoru.
Rīsi. 5.17. Tipiska IGBT frekvences pārveidotāja ķēde
Invertors pārveido līdzstrāvas spriegumu u d trīsfāzu (vai vienfāzes) impulsa spriegumā u un mainīgu amplitūdu un frekvenci. Saskaņā ar vadības sistēmas signāliem katrs elektromotora tinums caur attiecīgajiem invertora jaudas tranzistoriem ir savienots ar līdzstrāvas posma pozitīvajiem un negatīvajiem poliem. Katra tinuma savienojuma ilgums impulsa atkārtošanās periodā tiek modulēts saskaņā ar sinusoidālo likumu. Lielākais impulsa platums tiek nodrošināts puscikla vidū un samazinās puscikla sākumā un beigās. Tādējādi vadības sistēma nodrošina motora tinumiem pievadītā sprieguma impulsa platuma modulāciju (PWM). Sprieguma amplitūdu un frekvenci nosaka modulējošās sinusoidālās funkcijas parametri.
Pie augstas PWM nesējfrekvences (2 ... 15 kHz) motora tinumi darbojas kā filtrs to augstās induktivitātes dēļ. Tāpēc tajās plūst gandrīz sinusoidālas strāvas.
Pārveidotāju ķēdēs ar vadāmu taisngriezi (1) sprieguma amplitūdas izmaiņas u un to var panākt, regulējot pastāvīgā sprieguma lielumu u d , un frekvences maiņa ir invertora darbības režīms.
Ja nepieciešams, autonomā invertora izejā tiek uzstādīts filtrs (4), lai izlīdzinātu strāvas viļņus. (IGBT pārveidotāju shēmās zemā augstāko harmoniku līmeņa dēļ izejas spriegumā filtrs praktiski nav nepieciešams.)
Tādējādi frekvences pārveidotāja izejā veidojas trīsfāžu (vai vienfāzes) mainīgas frekvences un amplitūdas maiņspriegums (U out = var, f out = var).
Garums un attālums Masa beztaras produktu un pārtikas produktu tilpuma mēri Laukums Tilpums un mērvienības kulinārijas receptēs Temperatūra Spiediens, mehāniskais spriegums, Janga modulis Enerģija un darbs Jauda Spēks Laiks Lineārais ātrums Plakans leņķis Termiskā efektivitāte un degvielas efektivitāte Skaitļi Mērvienības informācijas apjoms Valūtas kursi Izmēri sieviešu apģērbi un apavi Vīriešu apģērba un apavu izmēri Leņķiskais ātrums un griešanās ātrums Paātrinājums Leņķiskais paātrinājums Blīvums Īpatnējais tilpums Inerces moments Spēka moments Griezes moments Īpašā siltumspēja (pēc masas) Enerģijas blīvums un degvielas īpatnējā siltumspēja ( pēc tilpuma) Temperatūras starpība Termiskās izplešanās koeficients Siltumizturība Siltumvadītspēja Īpatnējā siltumietilpība Enerģijas iedarbība, termiskā starojuma jauda Siltuma plūsmas blīvums Siltuma pārneses koeficients Tilpuma plūsma Masas plūsma Molārā plūsma Masas plūsmas blīvums Molārā koncentrācija Masa k koncentrācija šķīdumā Dinamiskā (absolūtā) viskozitāte Kinemātiskā viskozitāte Virsmas spraigums Tvaika caurlaidība Tvaika caurlaidība, tvaika pārneses ātrums Skaņas līmenis Mikrofona jutība Skaņas spiediena līmenis (SPL) Spilgtums Gaismas intensitāte Apgaismojums Izšķirtspēja datorgrafikā Frekvence un viļņa garums Optiskā jauda dioptrijās un fokusa attālums Opt dioptrijās un lēcas palielinājumā (×) Elektriskais lādiņš Lineārais lādiņa blīvums Virsmas lādiņa blīvums Tilpnes lādiņa blīvums Elektriskā strāva Lineārā strāvas blīvums Virsmas strāvas blīvums Elektriskā lauka stiprums Elektrostatiskais potenciāls un spriegums Elektriskā pretestība Elektriskā pretestība Elektriskā vadītspēja Elektrovadītspēja Elektriskā kapacitāte Induktivitāte Amerikāņu stieples mērītājs Līmeņi in dBm (dBm vai dBmW), dBV (dBV), vati utt. vienības Magnetomotīves spēks Magnētiskā lauka stiprums Magnētiskais sviedri ok Magnētiskā indukcija Jonizējošā starojuma absorbētās dozas jauda Radioaktivitāte. Radioaktīvā sabrukšana Radiācija. Ekspozīcijas deva Radiācija. Absorbētā deva Decimālie prefiksi Datu pārraide Tipogrāfija un attēlu apstrāde Kokmateriālu tilpuma vienības Molārās masas aprēķināšana D. I. Mendeļejeva ķīmisko elementu periodiskā sistēma
1 apgrieziens minūtē [apgr./min.] = 6,00000000000002 grādi sekundē [°/s]
Sākotnējā vērtība
Konvertētā vērtība
radiāni sekundē radiāni dienā radiāni stundā radiāni minūtē grādi dienā grādi stundā grādi minūtē grādi sekundē apgriezieni dienā apgriezieni stundā apgriezieni minūtē apgriezieni sekundē apgriezieni gadā apgriezieni mēnesī apgriezieni nedēļā grādi gadā grādi vienā mēnesis grādi nedēļā radiāni gadā radiāni mēnesī radiāni nedēļā
Vairāk par leņķisko ātrumu

Galvenā informācija
Leņķiskais ātrums ir vektora lielums, kas nosaka ķermeņa griešanās ātrumu attiecībā pret rotācijas asi. Šis vektors ir vērsts perpendikulāri rotācijas plaknei, un to nosaka, izmantojot gimlet likumu. Leņķisko ātrumu mēra kā attiecību starp leņķi, kurā ķermenis ir pārvietojies, tas ir, leņķisko nobīdi, un tam pavadīto laiku. SI sistēmā leņķiskais paātrinājums tiek mērīts radiānos sekundē.
Leņķiskais ātrums sportā
Leņķiskais ātrums bieži tiek izmantots sportā. Piemēram, sportisti samazina vai palielina golfa nūjas, nūjas vai raketes leņķisko ātrumu, lai uzlabotu sniegumu. Leņķiskais ātrums ir saistīts ar lineāro ātrumu tā, ka no visiem segmenta punktiem, kas rotē ap punktu šajā segmentā, tas ir, ap rotācijas centru, tālākais punkts no šī centra pārvietojas ar vislielāko lineāro ātrumu. Tā, piemēram, ja golfa nūja griežas, tad tās nūjas gals, kas atrodas vistālāk no griešanās centra, kustas ar lielāko lineāro ātrumu. Tajā pašā laikā visi šī segmenta punkti pārvietojas ar vienādu leņķisko ātrumu. Tāpēc, pagarinot nūju, nūju vai raketi, sportists palielina arī lineāro ātrumu un attiecīgi trieciena ātrumu, kas tiek pārraidīts uz bumbu, lai tā varētu lidot lielāku attālumu. Raketes vai nūjas saīsināšana, pat pārtveršana zemāk nekā parasti, gluži pretēji, palēnina trieciena ātrumu.


Gariem cilvēkiem ar garām ekstremitātēm ir priekšrocības lineārā ātruma ziņā. Tas ir, pārvietojot kājas ar tādu pašu leņķisko ātrumu, tās pārvieto kājas ar lielāku lineāro ātrumu. Tas pats notiek ar viņu rokām. Šī priekšrocība var būt viens no iemesliem, kāpēc primitīvās sabiedrībās vīrieši medīja vairāk nekā sievietes. Visticamāk, ka tāpēc evolūcijas procesā ieguvēji bija arī garāki cilvēki. Garās ekstremitātes palīdzēja ne tikai skriešanā, bet arī medībās - garās rokas ar lielāku lineāro ātrumu meta šķēpus un akmeņus. No otras puses, garas rokas un kājas var radīt neērtības. Garām ekstremitātēm ir lielāks svars, un to pārvietošanai ir nepieciešama papildu enerģija. Turklāt, cilvēkam ātri skrienot, garās kājas kustas ātrāk, kas nozīmē, ka, saduroties ar šķērsli, trieciens būs spēcīgāks nekā cilvēkiem ar īsām kājām, kuri pārvietojas ar tādu pašu lineāro ātrumu.
Leņķiskais ātrums tiek izmantots arī vingrošanā, daiļslidošanā un niršanā. Ja sportists zina leņķisko ātrumu, tad ir viegli aprēķināt sitienu skaitu un citu akrobātiku lēciena laikā. Salto laikā sportisti parasti tur kājas un rokas pēc iespējas tuvāk ķermenim, lai samazinātu inerci un palielinātu paātrinājumu un līdz ar to arī leņķisko ātrumu. Savukārt niršanas vai piezemēšanās laikā tiesneši skatās, vai sportists ir piezemējies taisni. Lielā ātrumā ir grūti kontrolēt lidojuma virzienu, tāpēc sportisti apzināti palēnina leņķisko ātrumu, nedaudz izstiepjot rokas un kājas no ķermeņa.
Sportisti, kuri met disku vai āmuru, kontrolē arī lineāro ātrumu ar leņķiskā palīdzību. Ja jūs vienkārši iemetat āmuru, negriežot to aplī pa garu tērauda stiepli, kas palielina lineāro ātrumu, tad metiens nebūs tik spēcīgs, tāpēc vispirms tiek vērpta āmura. Olimpiskie sportisti griežas ap savu asi trīs līdz četras reizes, lai maksimāli palielinātu leņķisko ātrumu.
Leņķiskais ātrums un datu glabāšana optiskajos datu nesējos

Kad dati tiek ierakstīti optiskajos datu nesējos, piemēram, kompaktdiskos (CD), diskdzinis izmanto arī leņķisko un lineāro ātrumu, lai izmērītu datu rakstīšanas un lasīšanas ātrumu. Ir vairāki datu ierakstīšanas veidi, kuru laikā tiek izmantots mainīgs vai nemainīgs lineārais vai leņķiskais ātrums. Tā, piemēram, režīms pastāvīgs lineārais ātrums(angļu valodā - Constant Linear Velocity jeb CVL) - viena no galvenajām disku ierakstīšanas metodēm, kurā dati tiek ierakstīti vienā ātrumā pa visu diska virsmu. Ierakstīšanas laikā zonālais konstants lineārais ātrums(angļu valodā - Zone Constant Linear Velocity vai ZCLV) ierakstīšanas laikā tiek uzturēts nemainīgs ātrums noteiktā daļā, tas ir, diska zonā. Šādā gadījumā disks palēnināsies, ierakstot ārējās zonās. Režīms daļēji nemainīgs leņķiskais ātrums(Partial Constant Angular Velocity jeb PCAV) ļauj ierakstīt, pakāpeniski palielinot leņķisko ātrumu, līdz tas sasniedz noteiktu slieksni. Pēc tam leņķiskais ātrums kļūst nemainīgs. Pēdējais ierakstīšanas režīms - režīms pastāvīgs leņķiskais ātrums(Constant Angular Velocity jeb CAV). Šajā režīmā ierakstīšanas laikā visā diska virsmā tiek uzturēts vienāds leņķiskais ātrums. Šajā gadījumā lineārais ātrums palielinās, ierakstīšanas galviņai virzoties arvien tālāk uz diska malas pusi. Šis režīms tiek izmantots arī ierakstu un datora cieto disku ierakstīšanai.
Leņķiskais ātrums telpā
35 786 kilometru (22 236 jūdzes) attālumā no Zemes atrodas orbīta, kurā rotē satelīti. Šī ir īpaša orbīta, jo ķermeņi, kas riņķo ap to tajā pašā virzienā kā Zeme, visu orbītu veic aptuveni tādā pašā laikā, cik nepieciešams, lai Zeme veiktu pilnu apli ap savu asi. Tas ir nedaudz mazāk par 24 stundām, tas ir, viena siderāla diena. Tā kā ķermeņu griešanās leņķiskais ātrums šajā orbītā ir vienāds ar Zemes griešanās leņķisko ātrumu, novērotājiem no Zemes šķiet, ka šie ķermeņi nekustas. Tādu orbītu sauc ģeostacionārs.
Šo orbītu parasti palaiž satelīti, kas uzrauga laika apstākļu izmaiņas (meteoroloģiskie satelīti), satelīti, kas uzrauga izmaiņas okeānā, un sakaru satelīti, kas nodrošina televīzijas un radio pārraides, telefona sakarus un satelītu internetu. Ģeostacionāro orbītu bieži izmanto satelītiem, jo antenas, kas vienreiz ir vērstas uz satelītu, nav jānovirza vēlreiz. No otras puses, šādas neērtības ir saistītas ar to lietošanu, piemēram, nepieciešamība pēc tieša redzes lauka starp antenu un satelītu. Turklāt ģeostacionārā orbīta atrodas tālu no Zemes un ir nepieciešams izmantot jaudīgākus raidītājus, lai pārraidītu signālu nekā tie, kas tiek izmantoti, lai pārraidītu no zemākām orbītām. Signāls pienāk ar aptuveni 0,25 sekunžu aizkavi, kas ir pamanāma lietotājiem. Piemēram, ziņu pārraides laikā korespondenti attālos apgabalos parasti sazinās ar studiju, izmantojot satelīta savienojumu; tajā pašā laikā ir manāms, ka tad, kad televīzijas vadītājs uzdod viņiem jautājumu, viņi atbild ar nokavēšanos. Neskatoties uz to, satelīti ģeostacionārā orbītā tiek plaši izmantoti. Piemēram, vēl nesen sakari starp kontinentiem tika veikti galvenokārt ar satelītu palīdzību. Tagad tas lielā mērā ir aizstāts ar starpkontinentāliem kabeļiem, kas iet gar okeāna dibenu; tomēr satelītsakari joprojām tiek izmantoti attālos apgabalos. Pēdējo divdesmit gadu laikā sakaru satelīti ir nodrošinājuši arī piekļuvi internetam, īpaši attālās vietās, kur nav zemes sakaru infrastruktūras.

Satelīta kalpošanas laiku galvenokārt nosaka uz borta esošās degvielas daudzums, kas nepieciešams periodiskai orbītas korekcijai. Degvielas daudzums satelītos ir ierobežots, tāpēc, kad tas beidzas, satelīti tiek pārtraukti. Visbiežāk tie tiek pārnesti uz kapsētas orbītu, tas ir, orbītu, kas ir daudz augstāka par ģeostacionāro. Tas ir dārgs process; tomēr, ja nevajadzīgi satelīti tiek atstāti ģeostacionārā orbītā, tas apdraud sadursmes ar citiem satelītiem iespējamību. Vieta ģeostacionārajā orbītā ir ierobežota, tāpēc vecie satelīti, kas palikuši orbītā, aizņems vietu, ko varētu izmantot jauns satelīts. Šajā sakarā daudzās valstīs ir noteikumi, kas nosaka, ka satelītu īpašniekiem ir jāparaksta līgums, ka pēc darbības beigām satelīts tiks novietots kapsētas orbītā.
Vienības pārveidotāja rakstus rediģēja un ilustrēja Anatolijs Zolotkovs
Vai jums ir grūti pārtulkot mērvienības no vienas valodas uz citu? Kolēģi ir gatavi jums palīdzēt. Publicējiet jautājumu TCTerms un dažu minūšu laikā saņemsi atbildi.
Aprēķini vienību konvertēšanai pārveidotājā " Leņķiskais ātrums un griešanās ātrums' tiek veiktas, izmantojot unitconversion.org funkcijas.