Elektromotori līdzstrāva var būt neatkarīga, paralēla, seriāla vai jaukta ierosme (6.1. att.).
Rīsi. 6.1. Neatkarīgas līdzstrāvas motora ķēdes ( a),
paralēli ( b), secīgi ( iekšā) un sajaukts ( G) uzbudinājums
(shēmas "c" augšējā daļa pieder shēmai "a")
Paralēlā ierosmes motorā lauka tinums ir savienots paralēli armatūras spailēm. Bet strāva, kas plūst caur šo tinumu, atšķirībā no armatūras strāvas, nav atkarīga no slodzes, un to nosaka armatūrai pievadītais spriegums un ierosmes ķēdes kopējā pretestība. Šī iemesla dēļ šunta ierosmes motoru sauc arī par neatkarīgas ierosmes motoru.
Griezes moments M Līdzstrāvas motors un tā EMF E tiek noteiktas pēc formulām
M= uz F es es; E= kФω,
kur k ir dzinēja projektētais koeficients;
Ф – magnētiskā plūsma, Wb;
es i - armatūras strāva, A.
ω ir leņķiskais ātrums, rad/s.
Elektromehāniskie vienādojumi ω = ƒ ( es i) un mehāniskā ω = ƒ ( M) raksturlielumiem ir forma
ω = U/(kF) – ( R es + R p) / (k F) es es;
ω = U/(kF) – ( R es + R p) / (līdz 2 F2) M.
Ideālās tukšgaitas leņķiskais ātrums (pie es i = 0 vai M = 0)
ω 0 = U/(kF).
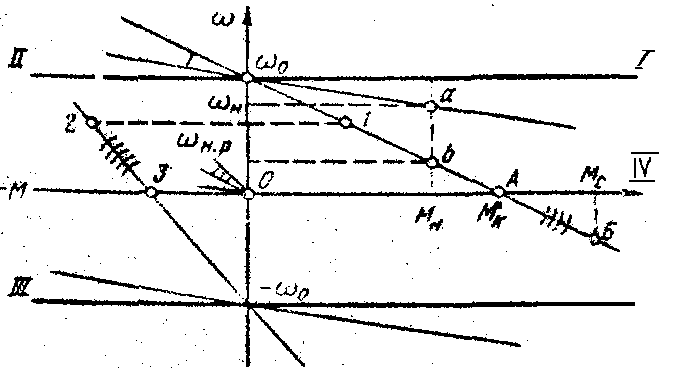
Uz att. 6.2 parāda līdzstrāvas motora ar neatkarīgu ierosmi (DPT NV) mehāniskās īpašības visos darbības režīmos. Motora režīma raksturlielumu raksturīgie punkti ir: ideālās tukšgaitas punkts (ω 0, M= 0); nominālā režīma punkts (ω n, M n); punkts īssavienojums (ω = 0, M = M uz).
Mehāniskā raksturlieluma stingrību nosaka ierosmes plūsma un enkura ķēdes pretestība:
β = d M/dω = - līdz 2 Ф 2 / ( R es + R p) = - M uz / ω.
Rīsi. 6.2. Līdzstrāvas motora ar neatkarīgu ierosmi kombinētie mehāniskie raksturlielumi
Augstākā stinguma moduļa vērtība atbilst dabiskajam mehāniskajam raksturlielumam, jo ierosmes strāva ir vienāda ar nominālo strāvu un vadības pretestību R p \u003d 0. Palielinoties reostata pretestībai R p palielinās mehāniskā raksturlieluma slīpums un samazinās leņķiskais ātrums. Par noteiktu pretestības vērtību R p un nominālais griezes moments M n dzinēja leņķiskais ātrums
ω n.r = ω 0 (1 – es n ( R es + R R) / U n.
Lai aprēķinātu mehāniskos raksturlielumus, ir jāzina motora armatūras pretestība R i, kas ir norādīts katalogos. Ja nav rūpnīcas datu, vērtība R Es atrodu aptuveni pēc formulas
R i \u003d 0,5 (1 - ŋ n) ( U n/ es n).
Tā kā DPT NV mehāniskie raksturlielumi ir nepārprotami, to attēlošanai pietiek ar diviem punktiem:
1) ω = ω 0 un M = 0,
2) ω = ω n (vai ω = ω n.r) un M = M n.
DPT NV ir iespējami šādi trīs elektriskās bremzēšanas režīmi.
1. Reģeneratīvā bremzēšana, kas rodas, ja dzinēja apgriezieni pārsniedz ideālos tukšgaitas apgriezienus. Tas ir visekonomiskākais, jo bremzēšanas enerģija tiek nodota elektrotīklam. Mehāniskie raksturlielumi šajā režīmā ir atbilstošo motora režīma raksturlielumu turpinājums II kvadrantā. Reģeneratīvās bremzēšanas laikā motora ķēde nemainās.
2. Dinamiskā bremzēšana. Motora armatūra ir atvienota no tīkla un īssavienojums ar pretestību. Šajā gadījumā kustīgo daļu (mehānisma un motora armatūras) mehāniskā enerģija tiek pārveidota par elektroenerģiju, kas tiek zaudēta siltumenerģijas veidā enkura ķēdes pretestībā. Mehāniskie raksturlielumi šajā bremzēšanas režīmā iet caur izcelsmi (6.2. attēlā - līnijas ar trim iecirtumiem).
3. Reversā bremzēšana veic divos veidos:
1) augstas pretestības ieviešana armatūras ķēdē.Šajā gadījumā motora griezes moments kļūst mazāks par statiskās slodzes griezes momentu. M Ar. Dzinējs apstājas (punktā A) un pēc tam griezes momenta ietekmē M c sāk griezties otrā virzienā, attīstot bremzēšanas momentu; punktā B iestājas līdzsvara stāvoklis. Mehāniskie raksturlielumi ir motora režīma atbilstošo raksturlielumu turpinājums (6.2. att. - līnijas ar četriem serifiem);
2) bremzēšana, pa ceļam pārslēdzot armatūras tinuma polaritāti. Motors darbojas punktā 1 , pēc pārslēgšanas tas pārslēgsies uz reostatisko raksturlielumu punktā 2. Gar līniju 2–3 notiek palēninājums (līnija ar pieciem serifiem). Punktā 3 motors apstājas un ir jāatvieno no elektrotīkla, lai izvairītos no pārslēgšanās uz motora režīmu ar apgrieztu griešanos.
AT Līdzstrāvas motors ar virknes ierosmide-niem armatūras strāva ir arī ierosmes strāva. Ierosinājuma magnētiskā plūsma palielinās, palielinoties slodzei, kā rezultātā leņķiskais ātrums samazinās saskaņā ar vienādojumu (6.1) un mehāniskās īpašības dzinējs būs mīksts (6.3. att.). Pateicoties tam, NV DPT salīdzinoši viegli un vienmērīgi pārvar pārslodzes, un tam ir augsts palaišanas griezes moments. Šīs dzinēja īpašības ļauj to plaši izmantot transporta mehānismu piedziņā. Dzinēja mehāniskās īpašības ievērojami mīkstina, ja armatūras ķēdē tiek ievadīts reostats (6.3. att., līnijas ar vienu iecirtumu).
Rīsi. 6.3. Līdzstrāvas motora mehāniskie parametri
ar secīgu ierosmi
DPT PV nav iespējams ieviest reģeneratīvās bremzēšanas režīmu, jo tajā nav ideāla tukšgaitas ātruma.
Dinamiskā bremzēšana var veikt saskaņā ar shēmu ar pašiedrošanos un ar neatkarīgu ierosmi. Pirmajā gadījumā armatūra un ierosmes tinums tiek atvienoti no tīkla un slēgti reostatam. Uz izvairieties no iekārtas atgaisošanas, nepieciešams pārslēgt ierosmes tinumu (vai enkuru), lai nemainās strāvas virziens ierosmes tinumā. Šajā gadījumā iekārta pati par sevi tiek ierosināta pie noteiktas armatūras ķēdes pretestības tikai noteiktā vērtībā leņķiskais ātrums; satraukti, tas rada bremzēšanas momentu. Mehāniskie raksturlielumi ir nelineāri (6.3. attēlā - līknes ar četriem iecirtumiem).
Dzinēja mehāniskie raksturlielumi dinamiskā bremzēšanas režīmā ar neatkarīgu ierosmi ir līdzīgi dzinēja ar neatkarīgu ierosmi atbilstošajiem raksturlielumiem (6.3. att. - līnijas ar diviem iegriezumiem). Šī bremzēšanas metode atrasta plašs pielietojums, un pirmo metodi izmanto reti, galvenokārt avārijas gadījumā, piemēram, ja tīkla spriegums neizdodas.
Bremzēšana ar opozīciju, tāpat kā DPT NV, tiek veikta divos veidos:
1) iekļaušana augstas pretestības armatūras ķēdē;
2) mainot armatūras tinuma polaritāti, atstājot nemainīgu strāvas virzienu ierosmes tinumā.
Ar pirmo metodi mehāniskais raksturlielums būs motora režīmam atbilstošā raksturlieluma turpinājums (6.3. attēlā - līnija ar trim iecirtumiem). Otrajā metodē bremzēšanu veic pa līniju 1 –2–3 .
Līdzstrāvas elektrisko piedziņu ātruma kontrole. DPT NV ātrumu var regulēt:
1) mainot pretestību armatūras ķēdē;
2) ierosmes plūsmas izmaiņas;
3) mainot armatūrai pievadīto spriegumu.
regula saskaņā ar pirmo metodi ir būtiski trūkumi:
- mehānisko raksturlielumu stingrība samazinās, samazinoties leņķiskajam ātrumam, un palielinās jaudas zudumi galvenajā ķēdē;
- kontroles diapazons ir ierobežots, it īpaši pie zemām slodzēm;
– neliels regulēšanas gludums un precizitāte.
Šo iemeslu dēļ šāda veida regulēšana tiek reti izmantota līdzstrāvas piedziņā.
Autors otrais veids magnētisko plūsmu iespējams regulēt tikai samazināšanās virzienā (jo nominālajā režīmā motora magnētiskā ķēde ir piesātināta), kas atbilst ātruma palielinājumam virs nominālā. Iespējamais ātruma regulēšanas diapazons standarta motoram nepārsniedz 2. Augšējo ātruma ierobežojumu ierobežo dzinēja armatūras elementu mehāniskā izturība - armatūras tinumu pārsēji, kolektors.
Galvenais veids, kā kontrolēt DPT NV ātrumu, ir metode, kuras pamatā ir armatūrai piegādātā sprieguma maiņa, ko veic, izmantojot īpašu regulējamu pārveidotāju. Tiristoru pārveidotājus galvenokārt izmanto kā atsevišķus strāvas avotus. Piedziņas mehānisko īpašību stingrība saskaņā ar sistēmu "pārveidotājs - DCT NV" ir gandrīz nemainīga. Mehāniskie raksturlielumi ir viena otrai paralēlu taisnu līniju saime. Šeit regulēšanas diapazons, gludums un precizitāte ir augstāka nekā ar citām regulēšanas metodēm. Tāpēc šī piedziņas sistēma tiek izmantota mehānismiem, kuriem nepieciešama dziļa un vienmērīga ātruma kontrole.
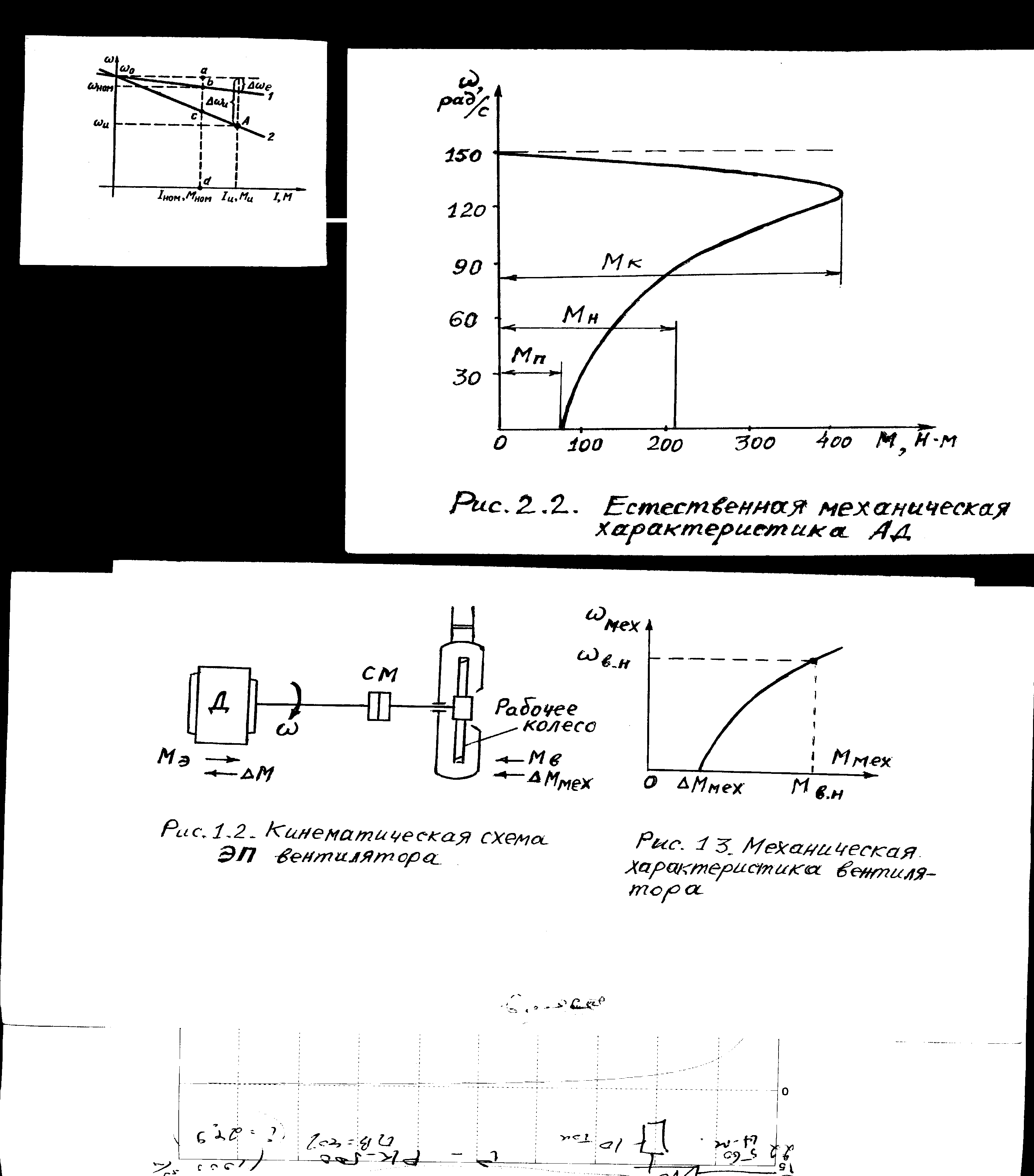
Papildu rezistoru aprēķins DPT NV armatūras ķēdē. Ja ir zināms dabiskais elektromehāniskais vai mehāniskais raksturlielums 1 dzinējs (6.4. att.) un tā pases dati, tad pretestības aprēķins R d, ja tas ir iekļauts armatūras ķēdē, vēlamais mākslīgais raksturlielums 2 šķērsos punktu A ar norādītajām koordinātām ω un, es un vai ω un, M un, var veikt ar šādām visizplatītākajām metodēm.
Rīsi. 6.4. DPT HB raksturlielumi vērtības aprēķināšanai
vadības rezistori
Proporciju metode. Uzrakstīsim ātruma kritumu attiecību pie strāvas es un vai brīdis M un uz dabisko Δω e un vēlamo mākslīgo Δω un raksturlielumiem:
Δω e / Δω u = es un R es / ( es un ( R es + R e)) = R es / ( R es + R e).
Pēc tam vēlamā vērtība
R d = R i (Δω un / Δω e - 1).
Segmentu metode neprasa zināšanas par motora iekšējās pretestības vērtību R i (turklāt tā vērtību var noteikt pēc zināmas dabas īpašības).
Uz dotā mākslīgā raksturlīknes (skat. 6.4. att.) uzrakstīsim izteiksmi motora apgriezieniem pie nominālās strāvas. es n, brīdis M n, magnētiskā plūsma F n un spriegums U n:
ω un = U n / (kF n) (1 - es n R/ U n),
kur U n / (kF n) \u003d ω 0.
ω un = ω 0 (1 – R / R n).
Šeit R n = U n/ es n - tā sauktā nominālā pretestība, kas ir bāzes vērtība aprēķinos, Ohm.
Attiecība
R / U n \u003d (ω 0 - ω un) / ω 0 \u003d δ
atspoguļo svarīgu NV DPT īpašību: relatīvā ātruma starpība δ \u003d Δω / ω 0 ir vienāda ar armatūras ķēdes relatīvo aktīvo pretestību R / R n.
Norādīsim attēlā. 6.4 raksturīgie punkti a, b,Ar, d un ņemiet vērā, ka ω 0 – ω un = Δω = dūzis, ω 0 = reklāma. Tad R = R n Δω / ω 0 = R n dūzis/reklāma; R d = R n bAr/reklāma; R i = R n ab /reklāma.
Tādējādi, lai atrastu R d vispirms ir jānosaka segmentu garums atbilstoši raksturlielumiem bAr un reklāma plkst nominālā strāva vai griezes momentu un aprēķināt nominālo pretestību R n = U n/ es n.
Papildu rezistoru aprēķinu var veikt arī, izmantojot šādas formulas noteiktai pieļaujamajai strāvai es papildu, ko nosaka pieļaujamā momenta vērtība M papildu vai nosacījumi iedarbināšanai, atpakaļgaitai un bremzēšanai.
Rezistoru pretestība R d1 sākumā ( E = 0)
R q1 = ( U / es pievienot) - R es
Rezistoru pretestība R d2 dinamiskās bremzēšanas laikā
R q2 = ( E / es pievienot) - R es ≈ ( U / es pievienot) - R I).
Rezistoru pretestība R d3, braucot atpakaļgaitā vai bremzējot ar pretpārslēgšanos
R d3 = (( U + E) / es pievienot) - R i ≈ (2 U / es pievienot) - R es
Piemērs . DPT NV tipam PBST-53 ir šādi pases dati: R n = 4,8 kW; n n = 1500 apgr./min; U n = 220 V; es n = 24,2 A; R i = 0,38 omi; es v.n = 0,8 A. Ir jānosaka:
1) rezistora pretestība, kuras iekļaušana motora armatūras ķēdē nodrošinās mākslīgā mehāniskā raksturlīknes pāreju caur punktu ar koordinātām ω un = 90 rad/s, M n = 25 Nm;
2) rezistoru pretestība, kuru iekļaušana ierobežos strāvu palaišanas un bremzēšanas laikā, pretēji līmenim es pievienot = 3 es n.
Līdzstrāvas iekārtā armatūras tinumam ir zema pretestība un, kad tas ir savienots ar tīklu, sākuma strāvas, kas var sasniegt 15...20I nom. Armatūras strāvu palielināšanās virs vērtības 2...2,5I nom noved pie pārslēgšanas pasliktināšanās.
Turklāt radušies dinamiskie spēki var pakāpeniski iznīcināt armatūras tinumu, izraisīt atslēgu bīdīšanu, vārpstu sagriešanos utt. Starta strāvu ierobežošana tiek veikta ar pretestību r 1, r 2, r 3 palīdzību, kas iekļautas enkura ķēdē (2.12. att.). Motoram paātrinoties, EMF palielinās un strāva samazinās. Secīgi saīsinot pretestības ar kontaktiem KM1, KM2, KMZ, tās veic (veic) iedarbināšanu. Dzinēja palaišanas shēma ir parādīta attēlā. 2.13.
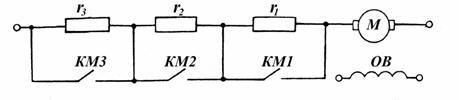
Rīsi. 2.13. Shēma palaišanas rezistoru ieslēgšanai ..
Pārslēgšanas strāvu I 1 un I 2 vērtības tiek izvēlētas, pamatojoties uz elektriskās piedziņas tehnoloģijas prasībām un motora pārslēgšanas jaudu. Tātad tie ņem I 1 \u003d (2,0 ... 2,5) I H un I 2 \u003d (1,2 ... 1,3) I H gadījumos, kad dzinēja iedarbināšanas ilgums ietekmē bieži ieslēgtas mašīnas veiktspēju.
Ja Tu gribi vienmērīgs sākums piemēram, pasažieru lifti, tad pārslēgšanas strāvu vērtības noteiks pieļaujamie elektriskās piedziņas paātrinājumi. Gadījumos, kad iedarbināšana ir reta un palaišanas apstākļi nav ierobežoti, strāvu I 1 un I 2 vērtības var ņemt nedaudz vairāk nekā darba strāvas (bet daudz mazāk nekā pirmajā gadījumā, kad I 1 = (2 ... 2,5) I N.
Vērtības starta pretestības aprēķināts ar analītiskām un grafiskām metodēm. Ja ir iestatīts soļu skaits, tas nozīmē, ka aprēķins tiek veikts jau zināmam standarta kontaktora panelim. Ja soļu skaits nav zināms, tas ir jāizvēlas
Analītiskā metode palaišanas pretestības aprēķināšanai
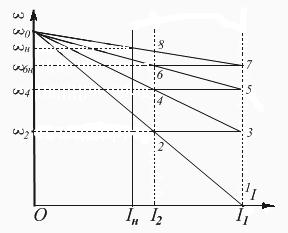
Kad dzinējs ir pievienots tīklam, paātrinājums sākas ar starta pretestību R 3 \u003d r I + r 1 + r 2 + r 3 (2.13. att.). Šīs pretestības atbilst mākslīgam elektromehāniskajam raksturlielumam
1 - 2 - ω 0 (2.14. att.). Pie strāvas I 2 un ātruma ω 2 (2. punkts) papildu pretestība r 3 tiek manevrēta ar KMZ kontaktiem, un motora strāva atkal palielinās līdz I 1 (3. punkts). Sākums turpinās ar pretestību R 3 \u003d r I + r 1 + r 2 saskaņā ar raksturlielumu Z - 4 - ω o. Šī raksturlieluma 4. punktā r 2 tiek izslēgts ar kontaktu KM2. Ar pretestību
R 3 \u003d r I + r 1 dzinējs paātrina atbilstoši raksturlielumam 5 - 6 - ω o. Pie ātruma ω 6 (6. punkts) pēdējā pretestība r 1 tiek izslēgta, un dzinējs sasniedz dabisko elektromehānisko raksturlielumu 7 - 8 - ω o, pa kuru tas paātrinās līdz ātrumam, kas atbilst vārpstas slodzei.
Lai noteiktu papildu pretestības vērtības, mēs ņemam strāvu attiecību, kas atbilst punktiem 3 un 2 pie sākuma diagrammas leņķiskā ātruma ω 2:
![]() . (2.31)
. (2.31)
Rīsi. 2.14. Sākuma shēma DPT NV.
Motora EMF vērtības šajos punktos ir vienādas, jo griešanās ātrums ω 2 NEMAINA
Pēc sprieguma samazināšanas mēs iegūstam:
![]() .
.
Pie leņķiskā ātruma ω 4 punktiem 4-5 mēs rakstām:
![]() ;
;
šeit E 4 \u003d E 5 un strāvas I 5 \u003d I 1, I 4 \u003d I 2, tāpēc:
![]() .
.
Līdzīgi leņķiskajam ātrumam ω 6 (6. un 7. punkts):
![]()
vai ![]() .
.
Apzīmēsim pārslēgšanas strāvu attiecību: , tad
Ja būtu m soļi, tad pēc analoģijas:
Šajā izteiksmē sākuma posmu skaits m un starta strāvu daudzveidība ir savstarpēji saistīti:
![]() (2.34) vai . (2,35)
(2.34) vai . (2,35)
Katra posma pretestības vērtību var noteikt šādi:
Palaišanas pretestības aprēķināšanas procedūra
Ja ir norādīts soļu skaits m, tad pretestības aprēķinu veic šādi:
1) iestatiet pašreizējo vērtību I 1 un nosakiet R m:
2) atrodiet pārslēgšanas strāvu attiecību:
![]() , (2.37)
, (2.37)
kur; P n, U n, I n, η n - dzinēja pases dati;
3) aprēķina otrās pārslēgšanas strāvas vērtību I 2:
un salīdziniet to ar motora darba strāvu I s, kas atbilst darba mašīnas maksimālajam griezes momentam palaišanas brīdī.
Ja ir zināms darba moments M s, tad
![]() ,
,
un ja jauda uz darba mašīnas vārpstas ir dota P V.r.m. , tad
![]() .
.
I 2 > (1.1...1.2) I c nosaka katra posma pretestību:
...![]() . (2.38)
. (2.38)
Ja nosacījums I 2 > 1,1I c nav izpildīts, tad izvēlamies jaunu
(lielāku) vērtību I 1 un atkārtojiet aprēķinu.
Ja pretestības pakāpienu skaits nav zināms, tad aprēķinu veic šādā secībā:
1) mēs iestatām pārslēgšanas strāvu I 1, I 2 vērtības un nosaka λ:
2) noteikt soļu skaitu:
kur; ![]() .
.
Iegūtā m vērtība (ja tā ir daļēja) tiek noapaļota līdz
tuvākais veselais skaitlis un norādiet λ un strāvu I 2:
![]() ; .
; .
Papildu aprēķins tiek veikts tāpat kā pirmajā gadījumā. Pēc pirmās vai otrās iespējas aprēķinu pabeigšanas ir jāpārbauda aprēķinu pareizība. Lai to izdarītu, mēs nosakām kopējo summu
pretestība:
un salīdziniet ar oriģinālu. Novirzei aprēķinos jābūt pieļaujamās kļūdas robežās - 5 ... 7%.
Grafiskā metode palaišanas pretestību aprēķināšanai
Šī aprēķina metode sniedz vizuālu papildu pretestības vērtību attēlojumu, taču tā ir ievērojams trūkums -
aprēķinu precizitāte ir atkarīga no dzinēja palaišanas shēmas veidošanas precizitātes.
Elektromehāniskās īpašības līdzstrāvas motoram ar papildu pretestību R ext., kas iekļauts armatūras ķēdē. attēlā parādīts. 2.15.
2.15.att. DPT NV elektromehāniskās īpašības ar papildu rezistoru ieviešanu armatūras ķēdē.
EML vienādojums nominālajai strāvai un ātrumam ω
(punkts at):
Mēs sadalām pēdējo izteiksmi sf n:
![]() . (2.39)
. (2.39)
No 2.15. att. mums ir:
 (2.40)
(2.40)
Salīdzinot izteiksmes (2.39) un (2.40), mēs rakstām:
tāpēc I n un sf n nemainīgām vērtībām segmenta ab vērtība ir proporcionāla . Ja raksturlielums iet caur punktu r , tad viss pielietotais U n tiek līdzsvarots ar iekrišanu
pretestība Rn:
R n nes vārdu nominālā pretestība,![]() . Nominālā motora pretestība - e tad šī ir armatūras ķēdes pretestība, pie kuras ieslēgšanas brīdī (pie ω = 0) enkura tinumā plūst nominālā strāva. Segments ag ir proporcionāls R n. Tādējādi atbilstoši segmenta vērtībai, kas nogriezta ar raksturlielumu nominālās strāvas līnijā, ir iespējams aprēķināt armatūras ķēdes pretestību. Bet šim jums jāzina mērogs
. Nominālā motora pretestība - e tad šī ir armatūras ķēdes pretestība, pie kuras ieslēgšanas brīdī (pie ω = 0) enkura tinumā plūst nominālā strāva. Segments ag ir proporcionāls R n. Tādējādi atbilstoši segmenta vērtībai, kas nogriezta ar raksturlielumu nominālās strāvas līnijā, ir iespējams aprēķināt armatūras ķēdes pretestību. Bet šim jums jāzina mērogs
pretestība:
kur; U n, I n, R n, - nominālais spriegums, motora strāva un jauda.
Pirmais skalas noteikšanas veids ir precīzāks, jo
segments ag ir lielāks par segmentu ab.
Aprēķinot līdzstrāvas motora palaišanas pretestību ar grafisku metodi, ir iespējamas divas iespējas.
1. Ir iestatīts starta posmu skaits m.
Saskaņā ar mašīnas pases datiem mēs veidojam dabisku elektromehānisko raksturlielumu, izmantojot divus punktus (ω o, M = 0) un (I n, ω n)
(2.16. att.). Novietojiet pārslēgšanas strāvu I 1 un I 2 vērtības.
To vērtībām jābūt pamatotām, pamatojoties uz tehnoloģiju prasībām attiecībā uz elektrisko piedziņu un motora pārslēgšanas jaudu. Strāvas I 1 ierobežojošā vērtība tiek pieņemta vienāda ar (2 ... 2,5) I n. Pašreizējais I 2 \u003d (1,2 ... 1,3) I n. Caur punktiem, kas atbilst I 1 un I 2 vērtībām uz strāvu ass, mēs novelkam divas taisnas līnijas, kas ir paralēlas rotācijas frekvences asij. Punktus 1 un ω o savienojam ar taisni, kas 2. punktā krustojas ar strāvu I 2 .
Tālākā būvniecības kārtība no 2. līdz 3.punktam utt. redzams no att. 2.16. Konstrukcijas rezultātā nepieciešams nokļūt dabiskā elektromehāniskā raksturlīknes un pārslēgšanas strāvas līnijas I 1 krustpunktā (7. punkts). Ja sakritība neizdevās vai pēdu skaits nav vienāds ar norādīto, tad jāmaina strāvas I 2 vai I 1 vērtība un jāatkārto konstrukcija.

Rīsi. 2.16. Grafiskā metode palaišanas pretestību aprēķināšanai
Tādējādi dzinēja iedarbināšanas process vairākos posmos, kas parādīts attēlā. 2.16 raksturo fakts, ka motora strāva palaišanas laikā svārstās no . Iedarbināšanas sākumā, motoram paātrinoties, palielinās tā EMF, kā rezultātā motora armatūras ķēdē sāk samazināties strāva un līdz ar to arī motora griezes moments. Kad strāva sasniedz, daļa palaišanas reostata tiek izslēgta, lai motora strāva atkal sasniegtu vērtību utt.
Noņemot palaišanas rezistorus, armatūras ķēdes pretestība samazinās, un līdz ar to samazinās arī elektromehāniskās konstantes vērtība, kas noved pie starta ilguma samazināšanās katrā nākamajā posmā.
Līdzstrāvas motoriem var būt neatkarīga, paralēla, virknes vai jaukta ierosme (6.1. att.).
Rīsi. 6.1. Neatkarīgas līdzstrāvas motora ķēdes ( a),
paralēli ( b), secīgi ( iekšā) un sajaukts ( G) uzbudinājums
(shēmas "c" augšējā daļa pieder shēmai "a")
Paralēlā ierosmes motorā lauka tinums ir savienots paralēli armatūras spailēm. Bet strāva, kas plūst caur šo tinumu, atšķirībā no armatūras strāvas, nav atkarīga no slodzes, un to nosaka armatūrai pievadītais spriegums un ierosmes ķēdes kopējā pretestība. Šī iemesla dēļ šunta ierosmes motoru sauc arī par neatkarīgas ierosmes motoru.
Griezes moments M Līdzstrāvas motors un tā EMF E tiek noteiktas pēc formulām
M= uz F es es; E= kФω,
kur k ir dzinēja projektētais koeficients;
Ф – magnētiskā plūsma, Wb;
es i - armatūras strāva, A.
ω ir leņķiskais ātrums, rad/s.
Elektromehāniskie vienādojumi ω = ƒ ( es i) un mehāniskā ω = ƒ ( M) raksturlielumiem ir forma
ω = U/(kF) – ( R es + R p) / (k F) es es;
ω = U/(kF) – ( R es + R p) / (līdz 2 F2) M.
Ideālās tukšgaitas leņķiskais ātrums (pie es i = 0 vai M = 0)
ω 0 = U/(kF).
Uz att. 6.2 parāda līdzstrāvas motora ar neatkarīgu ierosmi (DPT NV) mehāniskās īpašības visos darbības režīmos. Motora režīma raksturlielumu raksturīgie punkti ir: ideālās tukšgaitas punkts (ω 0, M= 0); nominālā režīma punkts (ω n, M n); īssavienojuma punkts (ω = 0, M = M uz).
Mehāniskā raksturlieluma stingrību nosaka ierosmes plūsma un enkura ķēdes pretestība:
β = d M/dω = - līdz 2 Ф 2 / ( R es + R p) = - M uz / ω.
Rīsi. 6.2. Līdzstrāvas motora ar neatkarīgu ierosmi kombinētie mehāniskie raksturlielumi
Augstākā stinguma moduļa vērtība atbilst dabiskajam mehāniskajam raksturlielumam, jo ierosmes strāva ir vienāda ar nominālo strāvu un vadības pretestību R p \u003d 0. Palielinoties reostata pretestībai R p palielinās mehāniskā raksturlieluma slīpums un samazinās leņķiskais ātrums. Par noteiktu pretestības vērtību R p un nominālais griezes moments M n dzinēja leņķiskais ātrums
ω n.r = ω 0 (1 – es n ( R es + R R) / U n.
Lai aprēķinātu mehāniskos raksturlielumus, ir jāzina motora armatūras pretestība R i, kas ir norādīts katalogos. Ja nav rūpnīcas datu, vērtība R Es atrodu aptuveni pēc formulas
R i \u003d 0,5 (1 - ŋ n) ( U n/ es n).
Tā kā DPT NV mehāniskie raksturlielumi ir nepārprotami, to attēlošanai pietiek ar diviem punktiem:
1) ω = ω 0 un M = 0,
2) ω = ω n (vai ω = ω n.r) un M = M n.
DPT NV ir iespējami šādi trīs elektriskās bremzēšanas režīmi.
1. Reģeneratīvā bremzēšana, kas rodas, ja dzinēja apgriezieni pārsniedz ideālos tukšgaitas apgriezienus. Tas ir visekonomiskākais, jo bremzēšanas enerģija tiek nodota elektrotīklam. Mehāniskie raksturlielumi šajā režīmā ir atbilstošo motora režīma raksturlielumu turpinājums II kvadrantā. Reģeneratīvās bremzēšanas laikā motora ķēde nemainās.
2. Dinamiskā bremzēšana. Motora armatūra ir atvienota no tīkla un īssavienojums ar pretestību. Šajā gadījumā kustīgo daļu (mehānisma un motora armatūras) mehāniskā enerģija tiek pārveidota par elektroenerģiju, kas tiek zaudēta siltumenerģijas veidā enkura ķēdes pretestībā. Mehāniskie raksturlielumi šajā bremzēšanas režīmā iet caur izcelsmi (6.2. attēlā - līnijas ar trim iecirtumiem).
3. Reversā bremzēšana veic divos veidos:
1) augstas pretestības ieviešana armatūras ķēdē.Šajā gadījumā motora griezes moments kļūst mazāks par statiskās slodzes griezes momentu. M Ar. Dzinējs apstājas (punktā A) un pēc tam griezes momenta ietekmē M c sāk griezties otrā virzienā, attīstot bremzēšanas momentu; punktā B iestājas līdzsvara stāvoklis. Mehāniskie raksturlielumi ir motora režīma atbilstošo raksturlielumu turpinājums (6.2. att. - līnijas ar četriem serifiem);
2) bremzēšana, pa ceļam pārslēdzot armatūras tinuma polaritāti. Motors darbojas punktā 1 , pēc pārslēgšanas tas pārslēgsies uz reostatisko raksturlielumu punktā 2. Gar līniju 2–3 notiek palēninājums (līnija ar pieciem serifiem). Punktā 3 motors apstājas un ir jāatvieno no elektrotīkla, lai izvairītos no pārslēgšanās uz motora režīmu ar apgrieztu griešanos.
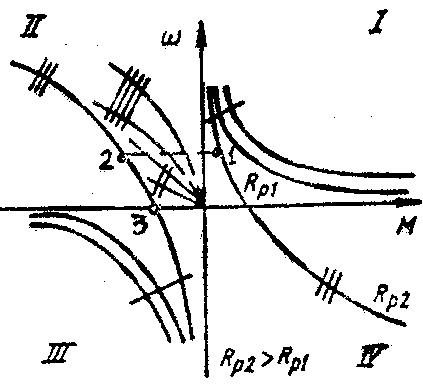
AT Līdzstrāvas motors ar virknes ierosmide-niem armatūras strāva ir arī ierosmes strāva. Palielinoties slodzei, palielinās ierosmes magnētiskā plūsma, kā rezultātā leņķiskais ātrums samazinās atbilstoši vienādojumam (6.1) un motora mehāniskais raksturlielums būs mīksts (6.3. att.). Pateicoties tam, NV DPT salīdzinoši viegli un vienmērīgi pārvar pārslodzes, un tam ir augsts palaišanas griezes moments. Šīs dzinēja īpašības ļauj to plaši izmantot transporta mehānismu piedziņā. Dzinēja mehāniskās īpašības ievērojami mīkstina, ja armatūras ķēdē tiek ievadīts reostats (6.3. att., līnijas ar vienu iecirtumu).
Rīsi. 6.3. Līdzstrāvas motora mehāniskie parametri
ar secīgu ierosmi
DPT PV nav iespējams ieviest reģeneratīvās bremzēšanas režīmu, jo tajā nav ideāla tukšgaitas ātruma.
Dinamiskā bremzēšana var veikt saskaņā ar shēmu ar pašiedrošanos un ar neatkarīgu ierosmi. Pirmajā gadījumā armatūra un ierosmes tinums tiek atvienoti no tīkla un slēgti reostatam. Uz izvairieties no iekārtas atgaisošanas, nepieciešams pārslēgt ierosmes tinumu (vai enkuru), lai nemainās strāvas virziens ierosmes tinumā. Šajā gadījumā mašīna tiek pašierināta pie noteiktas armatūras ķēdes pretestības tikai pie noteiktas leņķiskā ātruma vērtības; satraukti, tas rada bremzēšanas momentu. Mehāniskie raksturlielumi ir nelineāri (6.3. attēlā - līknes ar četriem iecirtumiem).
Dzinēja mehāniskie raksturlielumi dinamiskā bremzēšanas režīmā ar neatkarīgu ierosmi ir līdzīgi dzinēja ar neatkarīgu ierosmi atbilstošajiem raksturlielumiem (6.3. att. - līnijas ar diviem iegriezumiem). Šī bremzēšanas metode ir atradusi plašu pielietojumu, un pirmo metodi izmanto reti, galvenokārt avārijas gadījumā, piemēram, ja elektrotīkla spriegums neizdodas.
Bremzēšana ar opozīciju, tāpat kā DPT NV, tiek veikta divos veidos:
1) iekļaušana augstas pretestības armatūras ķēdē;
2) mainot armatūras tinuma polaritāti, atstājot nemainīgu strāvas virzienu ierosmes tinumā.
Ar pirmo metodi mehāniskais raksturlielums būs motora režīmam atbilstošā raksturlieluma turpinājums (6.3. attēlā - līnija ar trim iecirtumiem). Otrajā metodē bremzēšanu veic pa līniju 1 –2–3 .
Līdzstrāvas elektrisko piedziņu ātruma kontrole. DPT NV ātrumu var regulēt:
1) mainot pretestību armatūras ķēdē;
2) ierosmes plūsmas izmaiņas;
3) mainot armatūrai pievadīto spriegumu.
regula saskaņā ar pirmo metodi ir būtiski trūkumi:
- mehānisko raksturlielumu stingrība samazinās, samazinoties leņķiskajam ātrumam, un palielinās jaudas zudumi galvenajā ķēdē;
- kontroles diapazons ir ierobežots, it īpaši pie zemām slodzēm;
– neliels regulēšanas gludums un precizitāte.
Šo iemeslu dēļ šāda veida regulēšana tiek reti izmantota līdzstrāvas piedziņā.
Autors otrais veids magnētisko plūsmu iespējams regulēt tikai samazināšanās virzienā (jo nominālajā režīmā motora magnētiskā ķēde ir piesātināta), kas atbilst ātruma palielinājumam virs nominālā. Iespējamais ātruma regulēšanas diapazons standarta motoram nepārsniedz 2. Augšējo ātruma ierobežojumu ierobežo dzinēja armatūras elementu mehāniskā izturība - armatūras tinumu pārsēji, kolektors.
Galvenais veids, kā kontrolēt DPT NV ātrumu, ir metode, kuras pamatā ir armatūrai piegādātā sprieguma maiņa, ko veic, izmantojot īpašu regulējamu pārveidotāju. Tiristoru pārveidotājus galvenokārt izmanto kā atsevišķus strāvas avotus. Piedziņas mehānisko īpašību stingrība saskaņā ar sistēmu "pārveidotājs - DCT NV" ir gandrīz nemainīga. Mehāniskie raksturlielumi ir viena otrai paralēlu taisnu līniju saime. Šeit regulēšanas diapazons, gludums un precizitāte ir augstāka nekā ar citām regulēšanas metodēm. Tāpēc šī piedziņas sistēma tiek izmantota mehānismiem, kuriem nepieciešama dziļa un vienmērīga ātruma kontrole.
Papildu rezistoru aprēķins DPT NV armatūras ķēdē. Ja ir zināms dabiskais elektromehāniskais vai mehāniskais raksturlielums 1 dzinējs (6.4. att.) un tā pases dati, tad pretestības aprēķins R d, ja tas ir iekļauts armatūras ķēdē, vēlamais mākslīgais raksturlielums 2 šķērsos punktu A ar norādītajām koordinātām ω un, es un vai ω un, M un, var veikt ar šādām visizplatītākajām metodēm.
Rīsi. 6.4. DPT HB raksturlielumi vērtības aprēķināšanai
vadības rezistori
Proporciju metode. Uzrakstīsim ātruma kritumu attiecību pie strāvas es un vai brīdis M un uz dabisko Δω e un vēlamo mākslīgo Δω un raksturlielumiem:
Δω e / Δω u = es un R es / ( es un ( R es + R e)) = R es / ( R es + R e).
Pēc tam vēlamā vērtība
R d = R i (Δω un / Δω e - 1).
Segmentu metode neprasa zināšanas par motora iekšējās pretestības vērtību R i (turklāt tā vērtību var noteikt pēc zināmas dabas īpašības).
Uz dotā mākslīgā raksturlīknes (skat. 6.4. att.) uzrakstīsim izteiksmi motora apgriezieniem pie nominālās strāvas. es n, brīdis M n, magnētiskā plūsma F n un spriegums U n:
ω un = U n / (kF n) (1 - es n R/ U n),
kur U n / (kF n) \u003d ω 0.
ω un = ω 0 (1 – R / R n).
Šeit R n = U n/ es n - tā sauktā nominālā pretestība, kas ir bāzes vērtība aprēķinos, Ohm.
Attiecība
R / U n \u003d (ω 0 - ω un) / ω 0 \u003d δ
atspoguļo svarīgu NV DPT īpašību: relatīvā ātruma starpība δ \u003d Δω / ω 0 ir vienāda ar armatūras ķēdes relatīvo aktīvo pretestību R / R n.
Norādīsim attēlā. 6.4 raksturīgie punkti a, b,Ar, d un ņemiet vērā, ka ω 0 – ω un = Δω = dūzis, ω 0 = reklāma. Tad R = R n Δω / ω 0 = R n dūzis/reklāma; R d = R n bAr/reklāma; R i = R n ab /reklāma.
Tādējādi, lai atrastu R d vispirms ir jānosaka segmentu garums atbilstoši raksturlielumiem bAr un reklāma pie nominālās strāvas vai griezes momenta un aprēķiniet nominālo pretestību R n = U n/ es n.
Papildu rezistoru aprēķinu var veikt arī, izmantojot šādas formulas noteiktai pieļaujamajai strāvai es papildu, ko nosaka pieļaujamā momenta vērtība M papildu vai nosacījumi iedarbināšanai, atpakaļgaitai un bremzēšanai.
Rezistoru pretestība R d1 sākumā ( E = 0)
R q1 = ( U / es pievienot) - R es
Rezistoru pretestība R d2 dinamiskās bremzēšanas laikā
R q2 = ( E / es pievienot) - R es ≈ ( U / es pievienot) - R I).
Rezistoru pretestība R d3, braucot atpakaļgaitā vai bremzējot ar pretpārslēgšanos
R d3 = (( U + E) / es pievienot) - R i ≈ (2 U / es pievienot) - R es
Piemērs . DPT NV tipam PBST-53 ir šādi pases dati: R n = 4,8 kW; n n = 1500 apgr./min; U n = 220 V; es n = 24,2 A; R i = 0,38 omi; es v.n = 0,8 A. Ir jānosaka:
1) rezistora pretestība, kuras iekļaušana motora armatūras ķēdē nodrošinās mākslīgā mehāniskā raksturlīknes pāreju caur punktu ar koordinātām ω un = 90 rad/s, M n = 25 Nm;
2) rezistoru pretestība, kuru iekļaušana ierobežos strāvu palaišanas un bremzēšanas laikā, pretēji līmenim es pievienot = 3 es n.