- Кутове прискорення, виражене через обороти, число оборотів можна подати у вигляді nдо = n 0 + e"tі тоді
http://pandia.ru/text/80/153/images/image553.gif" width="201" height="37 src=">
що відповідає
n1 = 2 × 60 = 120 об/хв.
Тепер знаходимо при цій швидкості обертання маховика швидкість точок на його обід:
http://pandia.ru/text/80/153/images/image555.gif" width="236" height="20 src=">
Завдання 45.Вал, що обертається рівноприскорено зі стану спокою, в перші 12 з 95,5 обороту. З яким кутовим прискоренням обертається вал і яку кутову швидкість він набуває?
Рішення.
1. Кутове переміщення за час t=12 із рівноприскореного руху становить
http://pandia.ru/text/80/153/images/image557.gif" width="197" height="39 src=">
3. До кінця 12-ї секунди вал набуває кутової швидкості:
http://pandia.ru/text/80/153/images/image559.gif" width="180" height="37 src=">
Завдання 46.Колесо, що обертається з частотою 1500 об/хв, при гальмуванні починає обертатися рівногайно і через 30 зупиняється. Визначити кутове прискорення та кількість обертів колеса з початку гальмування до зупинки.
Рішення.
1. Виразимо початкову кутову швидкість рад/с:
http://pandia.ru/text/80/153/images/image561.gif" width="208" height="37 src=">
2. Визначимо кількість оборотів у вигляді
http://pandia.ru/text/80/153/images/image563.gif" width="263" height="36 src=">
Завдання 47.Обертання валу протягом перших 20с відбувається відповідно до рівняння j = 0,8t3.
Визначити кутову швидкість валу наприкінці 20 секунди; кутове прискорення на початку руху, наприкінці 10-ї та 20-ї секунд; скільки всього обертів робить вал за 20 с .
Рішення.
1. Визначимо кількість оборотів валу за 20с . Для цього попередньо знайдемо кут повороту за t= 20 с :
http://pandia.ru/text/80/153/images/image565.gif" width="199" height="37 src=">
2. Визначимо рівняння кутовий швидкостівалу:
http://pandia.ru/text/80/153/images/image567.gif" width="195" height="23 src=">
Якщо виразити цю кутову швидкість об/хв , то
http://pandia.ru/text/80/153/images/image569.gif" width="132" height="37 src=">
5. Знайдемо кутове прискорення на початку руху ( t 0= 0), наприкінці 10-ї ( t1= 10 с) та 20-й секунд ( t2= 20 с):
http://pandia.ru/text/80/153/images/image571.gif" width="187" height="23 src=">
Глава 5. СКЛАДНИЙ РУХ ТОЧКИ
§ 20. Абсолютний рух та його складові
У попередніх розділах ми розглядали рух точки та тіла щодо системи відліку, пов'язаної із Землею, яку умовно вважали нерухомою. Рух щодо цієї «нерухомої» системи координат прийнято називати абсолютним. Але іноді доводиться розглядати рух точки щодо системи, пов'язаної з тілом, яке саме рухається щодо Землі або тіл, що нерухомо скріплені з нею (стіни будівлі, рейки, машини тощо). У цьому випадку абсолютний рух точки зручно уявити як складний рух, що складається з двох (або більше) незалежних рухів.
Отримати повний текстРух точки щодо рухомої системи відліку називають відносним, а рух точки разом із рухомою системою відліку щодо нерухомої системи відліку називають переносним.
Для прикладу розглянемо рух вантажу, що піднімається за допомогою крана в умовах, коли стріла крана одночасно повертається навколо своєї осі. Системою відліку, що рухається, в цьому випадку є стріла крана. Щодо неї вантаж рухається прямолінійно вгору – це відносний рух. Одночасно разом зі стрілою вантаж здійснює рух дугою кола щодо «нерухомої» Землі – це переносний рух вантажу.
Спостерігач, що стоїть на Землі, бачить абсолютний рух вантажу, що складається з двох рухів, що відбуваються одночасно.
Складним також є рух людини по сходах ескалатора, що рухаються: рух людини по відношенню до сходів є відносним, а переміщення його разом зі сходами щодо нерухомих стін тунелю є переносним. Абсолютним буде рух людини щодо нерухомих стін.
Таким чином, абсолютний рух точки - сукупність двох рухів: відносного та переносного. При цьому розрізняють абсолютну, відносну та переносну траєкторії і відповідно такі ж швидкості та прискорення точки.
§21. Складання швидкостей та прискорень точки
у складному русі
У ряді випадків за заданим відносним і переносним рухами визначають абсолютний рух точки. Іноді задані абсолютний і один із складових рухів, а необхідно визначити інший складовий рух.
Розглянемо, як визначають абсолютний рух точки (тобто абсолютні переміщення, швидкість і прискорення), якщо її відносне та переносне рухи прямолінійні та спрямовані під кутом один до одного. Нехай вантаж Мрухається вниз по похилій площині та за проміжок часу D tпереміщається щодо неї на D Sотн (рис. 72).
/text/categ/nauka.php" class="myButtonNauka">Отримати повний текст
http://pandia.ru/text/80/153/images/image574.jpg" width="268" height="83 src=">
Розділимо кожен член рівняння (37) на час D t, протягом якого відбувався рух, і спрямовуючи D t® 0, отримаємо вираз:
http://pandia.ru/text/80/153/images/image576.gif" width="101" height="24 src=">. (38)
Отже, якщо відносне і переносне руху прямолінійні, абсолютна швидкість точки в кожен момент часу визначається як геометрична сума відносної і переносної швидкостей. Графічно абсолютна швидкість точки може бути визначена за правилом паралелограма або трикутника (рис. 74 а і б ).
http://pandia.ru/text/80/153/images/image578.gif" width="251" height="31 src=">
МЕТОДИЧНІ ВКАЗІВКИ ТА ПРИКЛАДИ РІШЕННЯ ЗАВДАНЬ З КИНЕМАТИКИ
Кінематика обертання тіла навколо нерухомої осі
1. Короткі відомості з теорії
Рівняння обертального рухутвердого тіла навколо нерухомої осі має вигляд
Відлік кута ведеться від обраного початку. При цьому кутам, відкладеним у напрямку руху годинникової стрілки, надається знак мінус, а кутам протилежного напрямку - знак плюс.
Кут повороту виявляється у радіанах. Іноді кут повороту визначається кількістю оборотів N. Залежність між і Nнаступна.
Кутова швидкість тіла:
Знак похідної дає можливість встановити відбувається обертання тіла в позитивному напрямку відліку кута повороту (знак "плюс") або у зворотний бік (знак "мінус"). Одиниця виміру кутової швидкості – радіан за секунду (або 1/с).
Іноді кутову швидкість характеризують числом оборотів за хвилину і позначають буквою n. Залежність між і nмає вигляд
Кутове прискорення тіла:
![]() (42)
(42)
Знак похідної дає можливість встановити, чи є обертання тіла в даний момент часу прискореним або сповільненим. Якщо знаки однакові, тіло обертається прискорено, і якщо їх знаки різні – уповільнено. Одиниця виміру кутового прискорення– радіан на секунду у квадраті (або 1/с 2 ).
Траєкторіями точок тіла, що не лежать на осі обертання, є кола з центрами на осі обертання та радіусами, рівними найкоротшій відстані від цих точок до осі обертання.
Модуль швидкості будь-якої точки тіла, що знаходиться на відстані h від осі обертання (рис. 18), визначається за формулою
. (43)
Направлена швидкість точки по дотичній до описуваної точкою кола у бік руху.
Прискорення будь-якої точки тіла складається з двох складових – обертального та загострювальногоприскорень:
Модуль обертального прискорення крапки визначається за формулою
Рис. 18
Обертальне прискорення спрямоване по дотичній до описуваної точкою кола в той же бік, що і його швидкість, якщо прискорене обертання тіла (рис. 18, а) і в бік, протилежну швидкості, якщо обертання уповільнене (рис.18, б).
Модуль загострювальногоприскорення визначається за формулою
Загострювальнеприскорення завжди спрямоване по радіусу кола від точки до центру кола (рис. 18).
Модуль повного прискорення крапки визначається за формулою
![]() (46)
(46)
2. Основні типи задач кінематики обертання тіла навколо осі
Залежно від того, що задано в умові завдання та що потрібно визначити, розрізняють такі два основні типи задач.
1. Досліджується рух тіла загалом. У цих завданнях спочатку необхідно отримати закони (40)–(42) і, використовуючи зв'язок між ними, визначити необхідну величину (див. приклади 17 та 18).
2. Потрібно визначити швидкості та прискорення окремих точок тіла. Для вирішення завдань цього спочатку треба встановити кінематичні характеристики руху всього тіла загалом, тобто. знайти , і . Після чого за формулами (43), (44), (45), (46) визначити швидкості та прискорення точок тіла (див. приклад 19).
Приклад 17Пропелер літака, що робить 1200 об / хв після вимкнення двигуна зупиняється через 8 с. Скільки оборотів зробив пропелер за цей час, якщо вважати його обертання рівноуповільненим?
Рішення:
Спочатку отримаємо закони обертання пропелера (40), (41) та (42). За умовою завдання пропелер обертається рівногайно, з цього виходить що
Тому
![]() (48)
(48)
Початковою кутовою швидкістю при уповільненому обертанні буде та, яку пропелер мав до вимкнення двигуна. Отже, . У момент зупинки при t 1 = 8 сек. кутова швидкість тіла. Підставляючи ці значення рівняння (47), отримаємо
Звідси
Якщо позначити кількість зроблених пропелером за час t 1 оборотів через N 1 , то кут повороту за той же час дорівнюватиме
Підставляючи знайдені значення і рівняння (48), отримаємо
![]()
Звідси ![]() оборотів.
оборотів.
приклад 18.Знайти закон обертання тіла навколо осі, якщо відомі такі дані: кутова швидкість змінюється пропорційно t 2 , початковий кут повороту ради, заданого моментучасу t 1 = 3 с кутове прискорення 1/с2.
Рішення:
За умовою задачі модуль кутової швидкості змінюється пропорційно t 2 . Позначаючи невідомий коефіцієнт пропорційності буквою k, маємо
Знайдемо , беручи похідні часу від обох частин рівності (49),
Визначимо коефіцієнт kз умови, що за t 1 = 3 сек. кутове прискорення 1/с 2: або
Підставляючи значення kв рівняння (49), отримаємо
Враховуючи, що , будемо мати
Помножуючи обидві частини цього рівняння на dtта інтегруючи, знаходимо
![]()
У початковий момент при t = 0, = 2 радий, отже, c = 2.
Таким чином, ![]() радіан.
радіан.
Приклад 19.У період розгону ротор електродвигуна обертається за законом, де t у сік, у рад.
Визначити наприкінці 4-ї секунди лінійну швидкість, обертальне, загострювальнеі повне прискорення точки, що лежить на обід ротора, якщо діаметр ротора D= 40 см.
Рішення:
За заданим рівнянням обертання ротора знаходимо його кутову швидкість і кутове прискорення .
Підставляючи значення t 1 = 4 сек у вираз для і знайдемо
![]() 1/с,
1/с,
![]() 1/с2.
1/с2.
Визначимо модулі лінійної швидкості, обертального та загострювальногоприскорень у цей момент часу за формулами (43), (44) і (45)
![]()
![]()
Модуль повного прискорення точки обода ротора визначимо за формулою (46)
3. Визначення швидкостей і прискорень у випадках, коли тіло, що обертається, входить до складу різних механізмів
Розглянемо механізми з поступальним та обертальним рухом ланок. Розв'язання задачі починають із визначення швидкостей точок тієї ланки, для якої рух заданий. Потім розглядають ланку, яка приєднана до першої ланки і т.д. В результаті визначають швидкості точок усіх ланок механізму. У такій послідовності визначають і прискорення точок.
Передача обертання від одного тіла, що обертається, званого ведучим, до іншого, званого веденим, може здійснюватися за допомогою фрикційної або зубчастої передачі (рис. 19).
Рис. 19
У фрикційної передачі обертання передається внаслідок дії сили тертя місці контакту стикаються коліс, в зубчастої передачі – від зачеплення зубів. Осі обертання ведучого та веденого коліс можуть бути паралельними (рис. 19, а, б) або перетинатися (рис. 19, в). У розглянутих випадках лінійні швидкості точок А дотику коліс однакові, їх модулі визначаються так:
![]() .
(50)
.
(50)
Звідси. (51)
Тобто кутові швидкості коліс фрикційної або зубчастої передачі обернено пропорційні радіусам коліс.
При перетворенні обертального руху на поступальне (або навпаки) часто використовують зачеплення зубчастого колеса із зубчастою рейкою (рис. 20). Для цієї передачі виконується умова: .
Крім фрикційної та зубчастої передач, існує передача обертання за допомогою гнучкого зв'язку (ременя, троса, ланцюга) (рис. 21).
Рис. 20 Мал. 21
Так як модулі швидкостей всіх точок ременя однакові і ремінь не ковзає поверхнями шківів, то співвідношення (50) і (51) відносяться і до ременной передачі.
Приклад 20У механізмі домкрата при обертанні рукоятки ОАшестерні 1, 2, 3, 4, 5 рухають зубчасту рейку НДдомкрата (рис. 22).
Визначити швидкість рейки, якщо ручка ОАробить 30 оборотів на хвилину ( n = 30 об/хв). Числа зубців шестерень: z 1 = 6,z 2 = 24,z 3 = 8,z 4 = 32; радіус п'ятої шестерні r 5 = 4 см.
Рис. 22
Рішення:
Бо ручка ОАжорстко з'єднана з шестернею 1, то остання робить також 30 об /хв або
![]()
Модулі швидкостей точок дотику зубчастих коліс 1 і 2 однакові для точок обох коліс і визначаються за формулою (50)
![]()
Звідси (див. також (51)).
Оскільки числа зубів пропорційні радіусам коліс, то .
Звідси
Шестерні 2 і 3 жорстко з'єднані між собою, тому
![]()
Для коліс 3 і 4, що знаходяться в зачепленні, на підставі (51) можна записати
Звідси ![]()
Шестерні 4 і 5 жорстко з'єднані між собою, тому
![]()
Модулі швидкостей точок зіткнення зубчастої рейки НДта шестерні 5 однакові, тому
![]()
або ![]()
Приклад 21.Рейка 1, ступінчасте колесо 2 з радіусамиR 2 та r 2 іколесо 3 радіусиR 3 , скріплене з валом радіусу r 3, знаходяться в зачепленні; на вал намотана нитка з вантажем 4 на кінці (рис.23). Рейка рухається згідно із законом
Дано:R 2 = 6 см, r 2 = 4 см, R 3 = 8 см, r 3 = 3 см, (S- в сантиметрах, t- У секундах), А- точка обода колеса 3,t 1 =3 с. Визначити: , , , у момент часу t = t 1 .
Розглянемо тверде тіло, що обертається навколо нерухомої осі. Тоді окремі точки цього тіла описуватимуть кола різних радіусів, центри яких лежать на осі обертання. Нехай деяка точка рухається по колу радіусу R(Рис. 6). Її положення через проміжок часу Dr задамо кутом Dj. Елементарні (нескінченно малі) повороти можна як вектори (вони позначаються чи ). Модуль вектора дорівнює куту повороту, яке напрям збігається з напрямом поступального руху вістря гвинта, головка якого обертається у бік руху точки по колу, т. е. підпорядковується правилу правого гвинта (рис. 6). Вектори, напрями яких зв'язуються з напрямом обертання, називаються псевдовекторами або векторами аксіальними. Ці вектори не мають певних точок застосування: вони можуть відкладатися з будь-якої точки осі обертання.
Кутовою швидкістю називається векторна величина, що дорівнює першій похідній кута повороту тіла за часом:
Вектор спрямований уздовж осі обертання за правилом правого гвинта, тобто так само, як і вектор (рис. 7). Розмірність кутової швидкості ![]() , а її одиниця - радіан за секунду (рад/с).
, а її одиниця - радіан за секунду (рад/с).

Рис. 6 Мал. 7
Лінійна швидкість точки (див. рис. 6)
. 
У векторному вигляді формулу для лінійної швидкості можна написати як векторний добуток:
![]()
При цьому модуль векторного твору, за визначенням, дорівнює еаКяп(шК) а напрямок збігається з напрямком поступального руху правого гвинта при його обертанні R.
Якщо w = const, то обертання рівномірне і його можна характеризувати періодом обертання Т- часом, протягом якого точка робить один повний оборот, тобто повертається на кут 2p.Так як проміжок часу Dt = Твідповідає Dj = 2p, то w = 2p/Т, звідки
![]()
Число повних оборотів, що здійснюються тілом при рівномірному його русі пс окоужності, в одиницю часу називається частотою обертання:
![]()
![]()
Кутовим прискоренням називається векторна величина, що дорівнює першій похідній кутової швидкості за часом:
 |
 |
Тангенційна складова прискорення
Нормальна складова прискорення

При обертанні тіла навколо нерухомої осі вектор кутового прискорення спрямую уздовж осі обертання у бік вектора елементарного збільшення кутової швидкості. При прискореному русі вектор сонаправлен вектору (рис. 8), при уповільненому - протиспрямований йому (рис. 9).

Рис. 8 Мал. 9
Таким чином, зв'язок між лінійними (довжина шляху s,пройденого точкою по дузі кола радіусу R,лінійна швидкість v, тангенціальне прискорення а t,нормальне прискорення а n)та кутовими величинами (кут повороту j , кутова швидкість w , кутове прискорення e) виражається такими формулами:
У разі рівнозмінного руху точки по колу (e-const)
де w 0 - Початкова кутова швидкість.
Завдання
1.1.Залежність пройденого тілом шляху від часу задається рівнянням s=A+Bt+Ct 2 +Dt 3(З=0,1 м/с 2 D=0,03м/с 3). Визначити: 1) час після початку руху через який прискорення атіла дорівнюватиме 2 м/с 2 ;
2) середнє прискорення<а>тіла за цей проміжок часу.
1.2. Нехтуючи опором повітря, визначити кут, під яким тіло кинуто до горизонту, якщо максимальна висота підйому тіла дорівнює 1/4 дальності його польоту.
1.3.Колесо радіусом R = 0,1 м обертається так, що залежність кутової швидкості від часу задається рівнянням w = 2At+ 5Bt 4 (А = 2 рад/с 2 та У= 1 рад/с 5). Визначити повне прискорення точок обода колеса через t = 1 з після початку обертання та кількість обертів, зроблених колесом за цей час. [а=8,5 м/с 2; N = 0,48]
1.4.Нормальне прискорення точки, що рухається по колу радіусом г = 4 м, задається рівнянням a n =A+Bt+Ct 2(A = 1 м/с 2, B = 6 м/с 2, С = 3 м/с 2). Визначити: 1) тангенційне прискорення крапки; 2) шлях, пройдений точкою за час t 1 =5з початку руху; 3) повне прискорення на момент часу t 2 =1 з.
1.5.Частота обертання колеса при рівноуповільненому русі за t = 1 хв зменшилася від 300 до 180 хв -1. Визначити: 1) кутове прискорення колеса; 2) число повних оборотів, зроблених колесом цей час.
1.6.Диск радіусом R=10 см обертається навколо нерухомої осі так, що залежність кута повороту радіуса диска від часу визначається рівнянням j =A+3t+Ct 2 +Dt 3(B = 1 рад/с, С = 1 рад/с 2, D = 1 рад/с 3). Визначити для точок на обід колеса до кінця другої секунди після початку руху: 1) тангенціальне прискорення %; 2) нормальне прискорення а n; 3) повне прискорення а.
1.56. Крапка рухається по колу радіусом R = 2см. Залежність шляху іноді дається рівнянням s = З/3, де З = 0,1 див/с3. Знайти нормальне аn та тангенціальне аt прискорення точки в момент, коли лінійна швидкість точки v = 0,3 м/с.
Рішення:
1.57. Точка рухається по колу отже залежність шляху від часу дається рівнянням s = A-Bt + Ct^2, де У = 2 м/с і З = 1 м/с2. Знайти лінійну швидкість v точки, її тангенціальне at, нормальне an і повне а прискорення через час t = 3 с після початку руху, якщо відомо, що при t' = 2 с нормальне прискорення точки а н = 0,5 м/с2.
Рішення: 
1.58. Знайти кутове прискорення колеса s, якщо відомо, що через час t = 2 с після початку руху вектор повного прискорення точки, що лежить на обіді, становить кут а = 60 ° з вектором її лінійної швидкості.
Рішення: 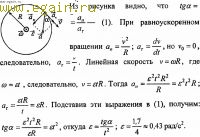
1.59. Колесо обертається з кутовим прискоренням E=2 рад/с2. Через час t = 0,5 з після початку руху повне прискорення колеса а = 13,6 см/с". Знайти радіус R колеса.
Рішення: 
1.60. Колесо радіусом R = 0,1м обертається так, що залежність кута повороту радіуса колеса від часу дається рівнянням (р = А + Bt + Сt^2, де =2рад/с і С = 1 рад/с^3. Для точок, лежать на обід колеса, знайти через час t = 2 з після початку руху:
а) кутову швидкість w;
б) лінійну швидкість v;
в) кутове прискорення E;
г) тангенціальне at та нормальне an прискорення.
Рішення: 