Прямий пуск - найпоширеніший метод пуску асинхронного двигуна короткозамкненим ротором. Двигун підключається безпосередньо до мережі живлення через пускач. При цьому асинхронний двигун з короткозамкненим ротором розвиває високий пусковий момент, що крутить, з відносно малим часом розгону. Цей метод зазвичай використовується для двигунів малої та середньої потужності, які досягають повної робочої частоти обертання за короткий час.
Прямий запуск. Цей спосіб застосовують для запуску асинхронних двигунівіз короткозамкненим ротором. Двигуни цього типу малої та середньої потужності зазвичай проектують так, щоб при безпосередньому підключенні обмотки статора до мережі пускові струми, що виникають, не створювали надмірних електродинамічних зусиль і перевищень температури, небезпечних з точки зору механічної і термічної міцності основних елементів машини.
В асинхронних двигунах відношення L/R порівняно мало (особливо у малих двигунах), тому перехідний процес у момент включення характеризується дуже швидким згасанням вільного струму. Це дозволяє знехтувати вільним струмом і враховувати тільки значення струму перехідного процесу, що встановилося.
Двигуни зазвичай пускають за допомогою електромагнітного вимикача - магнітного пускача (рис. 4.27, а) і розганяють автоматично за природною механічною характеристикою М (рис. 4.27,6) від точки П, що відповідає початковому моменту пуску, до точки Р, що відповідає умові М = Мст . Прискорення при розгоні визначається різницею абсцис кривих М і Мст і моментом інерції ротора двигуна та механізму, що приводиться у обертання. Якщо початковий момент пуску Мп< Мст, двигатель разогнаться не сможет.
Значення початкового пускового моменту можна одержати з формули (4.46а), прийнявши
Мп = m1 U12R"2 / (w1 [(R1 + R"2)2 + (X1 + Х"2)2]).
Відношення моментів Мп / Мном = kп.м називають кратністю початкового пускового моменту. Для двигунів з короткозамкненим ротором потужністю 0,6-100 кВт ГОСТ встановлено kп.м= 1,0÷2,0; потужністю 100-1000 кВт – kп.м = 0,7÷1,0.
Отримання кратностей пускового моменту, великих регламентованих ГОСТом, зазвичай небажано, оскільки це пов'язано з збільшенням активного опоруротора (див. 4.58) або зі зміною конструкції ротора (див. § 4.11), що погіршує енергетичні показники двигуна.
Недоліком даного способу пуску, крім порівняно невеликого пускового моменту, є також великий кидок пускового струмув п'ять - сім разів перевищує номінальне значення струму.
Незважаючи на зазначені недоліки, пуск двигуна шляхом безпосереднього підключення обмотки статора до мережі широко застосовують завдяки простоті та хорошим техніко-економічним властивостям двигуна з короткозамкненим ротором - низькою вартістю та високим енергетичним показниками (η, cos φ1, kм та ін.).
Пуск при зниженій напрузі. Такий пуск застосовують для асинхронних двигунів з короткозамкненим ротором великої потужності, а також двигунів середньої потужності при недостатньо потужних електричних мережах. Зниження напруги може здійснюватися такими шляхами:
а) перемиканням обмотки статора за допомогою перемикача з нормальної схеми на пускову схему Y. При цьому напруга, що подається на фази обмотки статора, зменшується в √3раз, що обумовлює зменшення фазних струмів у √3 разів і лінійних струмів у 3 рази. Після закінчення процесу пуску та розгону двигуна до номінальної частоти обертання обмотку статора перемикають назад на нормальну схему;
б) включенням до ланцюга обмотки статора на період пуску додаткових активних (резисторів) або реактивних (реакторів) опорів (рис. 4.28, а). При цьому на зазначених опорах створюються деякі падіння напруги ΔUдоб, пропорційні пусковому струму, внаслідок чого до обмотки статора подається знижена напруга. У міру розгону двигуна знижується ЕДСЕ2s, індукована в обмотці ротора, а отже, і пусковий струм. В результаті зменшується падіння напруги ΔUдоб на зазначених опорах і автоматично зростає прикладена до двигуна напруга. Після закінчення розгону додаткові резистори або реактори замикаються коротко контактором К1 ;
в) підключенням двигуна до мережі через знижувальний автотрансформатор АТр (рис. 4.28,6), який може мати кілька ступенів, що перемикаються у процесі запуску відповідною апаратурою.
Недоліком зазначених методів пуску шляхом зниження напруги є значне зменшення пускового та максимального моментів двигуна, які пропорційні квадрату напруги, тому їх можна використовувати тільки при пуску двигунів без навантаження.
На рис. 4.29 для прикладу наведено механічні характеристики двигуна при номінальній та зниженій напрузі, тобто при з'єднанні обмотки статора за схемами Y і Δ, а також графіки зміни струму I1 та моменту М при пуску двигуна шляхом перемикання обмотки статора з Y на Δ. При з'єднанні за схемою Y максимальний і пусковий момент зменшуються втричі, внаслідок чого двигун не в змозі здійснити пуск механізму з моментом навантаження Мн.
Пуск у хід асинхронного двигуна
У момент запуску n=0, тобто. ковзання S=1. Т.к. струми в обмотках ротора і статора залежать від ковзання і зростають при його збільшенні, пусковий струм двигуна в 5 ÷ 8 разів більший за його номінальний струм
Iпуск=(5÷8)Ін.
Як розглядалося раніше, через велику частоту ЕРС ротора асинхронні двигуни мають обмежений пусковий момент.
Mпуск=(0,8÷1,8)Mн.
Для пуску в хід двигуна необхідно, щоб пусковий момент, що розвивається, перевищуючи момент навантаження на валу. Залежно від потужності джерел живлення та умов пуску використовують різні способи пуску, які мають на меті: зменшення пускового струму та збільшення пускового моменту.
Розрізняють такі способи пуску в хід асинхронних двигунів: пряме включенняланцюг, пуск при зниженій напрузі, реостатний пуск, використання двигунів з поліпшеними пусковими властивостями.
2.11.1. Пряме включення до мережі
Це найпростіший і найдешевший спосіб запуску. На двигун вручну або за допомогою дистанційного керування подається номінальна напруга. Пряме включення в мережу допускається, якщо потужність двигуна не перевищує 5% потужності трансформатора, якщо від нього живиться і освітлювальна мережа. Обмеження потужності пояснюється кидками струму в момент пуску, що призводить до зниження напруги на затискачах вторинних обмоток трансформатора. Якщо трансформатора не живиться освітлювальна мережу, то пряме включення в мережу можна застосовувати для двигунів, потужність яких не перевищує 25% від потужності трансформатора.
2.11.2. Пуск при зниженій напрузі
Цей спосіб застосовують при пуску в хід потужних двигунів, для яких неприпустимим є пряме включення в мережу. Для зниження підводиться до обмотки статора напруги використовують дроселі та знижувальні автотрансформатори. Після пуску на обмотку статора подається напруга мережі.
Зниження напруги роблять з метою зменшення пускового струму, але одночасно, як це випливає з рис. 2.17 та 2.17.б, відбувається зменшення пускового моменту. Якщо напруга при пуску зменшити в раз, пусковий момент знизиться в 3 рази. Тому цей метод пуску можна використовувати лише за відсутності навантаження на валу, тобто. у режимі холостого ходу.
Якщо згідно з паспортними даними двигун повинен включатися в мережу за схемою трикутник, то для зниження пускового струму на час пуску в хід обмотку статора включають за схемою зірка.
Основні недоліки цього способу пуску: висока вартість пускової апаратури та неможливість пуску з навантаженням на валу.
Працюючи багатьох механізмів, що приводяться у обертання асинхронними двигунами, відповідно до технологічними вимогами виникає необхідність регулювати швидкість обертання цих механізмів. Способи регулювання частоти (швидкості) обертання асинхронних двигунів розкриває співвідношення:
n=(1−S)n0=(1−S)60f/p.
Звідси випливає, що при заданому навантаженні на валу частоту обертання ротора можна регулювати:
зміною ковзання;
зміною числа пар полюсів;
зміною частоти джерела живлення.
2.12.1. Зміна ковзання
Цей спосіб використовують у приводі механізмів, де встановлені асинхронні двигуни з фазним ротором. Наприклад, у приводі підйомно-транспортних машин. У ланцюг фазного ротора вводиться регулювальний реостат. Збільшення активного опору ротора впливає величину критичного моменту, але збільшує критичне ковзання (рис. 2.21).
На рис. 2.21 наведено механічні характеристики асинхронного двигуна при різних опорах регулювального реостата Rр3> Rр2> 0, Rр1 = 0.
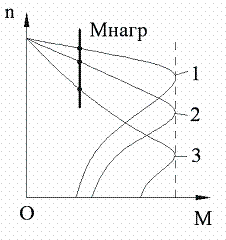
Як випливає з рис. 2.21 при цьому способі можна отримати великий діапазон регулювання частоти обертання у бік зниження. Основні недоліки цього способу:
Через великі втрати на регулювальному реостаті знижується коефіцієнт корисної дії, тобто. спосіб неекономічний.
Механічна характеристика асинхронного двигуна із збільшенням активного опору ротора стає м'якшою, тобто. знижується стійкість роботи двигуна.
Неможливо плавно регулювати частоту обертання.
Через перераховані недоліки цей спосіб застосовують для короткочасного зниження частоти обертання.
Регулювання частоти обертання асинхронних двигунів
З формули слід, що частоту обертання ротора асинхронного двигуна можна регулювати наступними способами: зміною частоти f1 напруги живлення, числа пар полюсів p і величини ковзання s.
Частотне регулювання. Цей спосіб дозволяє плавно змінювати частоту обертання широкому діапазоні. Для його здійснення потрібно, щоб двигун отримував живлення окремого джерела (рисунок 2.18). 
В якості такого джерела в даний час найбільше застосовують напівпровідникові статичні перетворювачі частоти.
Залежно від вимог до механічних характеристик асинхронного двигуна при частотному регулюванні одночасно зі зміною частоти f1 доводиться за певним законом змінювати напругу U1, що підводиться до обмотки статора.
Максимальний момент двигуна приблизно (без урахування опору r1) визначається (2.40),
![]() .
.
Враховуючи, що ,,, отримаємо
Якщо при регулюванні частоти обертання потрібно, щоб за будь-якої частоти f1 максимальний момент залишався незмінним (регулювання з ), то отримаємо
звідки випливає, що для регулювання n2 при необхідно напруга U1, що підводиться до обмотки статора, змінювати пропорційно його частоті. У цьому основний магнітний поток машины при різних значеннях частоти f1 залишається незмінним, тобто.
![]() (2.56)
(2.56)
Механічні характеристики асинхронного двигуна при регулюванні сMмакс = const показані малюнку 2.19. 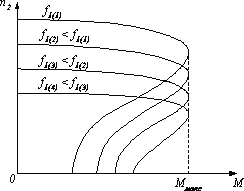
Недоліком частотного регулювання є відносно висока вартість перетворювальних установок.
Регулює частоту обертання зміною числа пар полюсів статорної обмотки. Для здійснення цього регулювання на статорі в загальних пазах розміщують не одну, а дві обмотки, маю- 
різні кроки і, отже, різна кількість пар полюсів. Залежно від необхідної частоти обертання до мережі підключається та чи інша обмотка. Цей спосіб застосовується порівняно рідко, тому що має істотний недолік- мале використання обмотувального дроту (в роботі знаходиться лише одна з обмоток).
Значно частіше зміна числа пар полюсів досягається зміною (перемиканням) схеми з'єднань статора обмотки. Принцип такого перемикання показано малюнку 2.20.
При переході з послідовного з'єднання двох котушок на паралельне число пар полюсів змінюється з 2 на 1. За наявності фазної обмотки на роторі її також необхідно перемикати одночасно з обмоткою статора, що є великим недоліком. Тому даний спосіб регулювання частоти обертання застосовується лише у двигунів із короткозамкненим ротором.
Асинхронні двигуни з перемиканням числа пар полюсів називають багатошвидкісними. Вони випускаються на дві, три та чотири частоти обертання. Відомо велике число схем, що дозволяє здійснювати перемикання пар полюсів. Ці схеми поділяються на схеми регулювання з постійним моментом та схеми регулювання з постійною потужністю. Механічні характеристики двошвидкісних двигунів показано малюнку 2.21.

Рисунок 2.20 – Зміна числа пар полюсів перемиканням котушок обмотки:
а – дві пари полюсів; б – одна пара полюсів
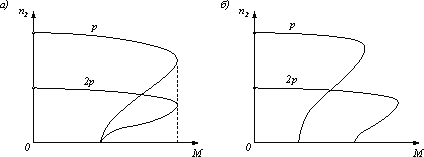
Малюнок 2.21 – Механічні характеристики двошвидкісного двигуна
з перемиканням числа пар полюсів щодо 2:1
при постійному моменті (а) та при постійній потужності (б)
З усіх способів регулювання частоти обертання асинхронних двигунів спосіб перемикання числа пар полюсів є найбільш економічним, хоча він має недоліки:
– двигуни мають відносно великі габарити та масу порівняно з двигунами нормального виконання;
- Регулювання частоти обертання ступінчасте.
Багатошвидкісні двигуни застосовують для електроприводу верстатів та різних механізмів, частоту обертання яких потрібно регулювати в широких межах (наприклад, ліфтові асинхронні двигуни).
Регулює частоту обертання за рахунок зміни напруги живлення. Зазначене регулювання можна здійснити за допомогою тиристорного регулятора напруги РН (рисунок 2.22). 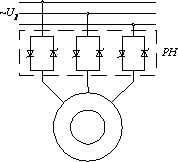
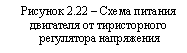
Так як крутний момент асинхронного двигуна пропорційний, то механічні характеристики при напругах, менших за номінальний, підуть нижче природної (рисунок 2.23). 
Якщо момент опору MС залишається постійним, то як випливає з малюнка 2.23, при зниженні напруги ковзання двигуна
збільшується.
Частота обертання ротора у своїй зменшується.
Регулювання ковзання цим способом можливе в межах
0 < s < sкр.
Подальше зниження напруги (нижче U1(2)) неприпустимо, тому що при цьому Mмакс< MС и двигательостановится.
Регулювання частоти обертання двигунів зміною напруги U1, що підводиться, має істотний недолік: в цьому випадку збільшуються втрати і, таким чином, знижується ККД двигуна. При зниженні напруги пропорційно U1 зменшується основний магнітний потік машини, внаслідок чого при M = MС = const зростають струм в обмотці ротора і, отже, електричні втрати в роторі. Магнітні втрати сталі статора зменшуються. Зазвичай при навантаженнях двигунів, близьких до номінальної, зниження U1 призводить до збільшення сумарних втрат та підвищення нагрівання двигунів. Тому аналізований спосіб регулювання частоти обертання знаходить застосування головним чином для машин невеликої потужності.
Регулює частоту обертання асинхронних двигунів шляхом включення в ланцюг ротора додаткового активного опору. Даний спосіб регулювання застосовується лише у двигунах із фазним ротором. Він дозволяє плавно змінювати частоту обертання у межах (малюнок 2.24). Недоліками його є великі втрати енергії в додаткових опорах, надмірно «м'яка» механічна характеристика двигуна при великому опорі в ланцюгу ротора. У деяких випадках останнє є неприпустимим, оскільки невеликій зміні навантажувального моменту відповідає істотна зміна частоти обертання. Насправді цей спосіб застосовується, головним чином, регулювання частоти обертання невеликих двигунів, наприклад, в підйомних пристроях. 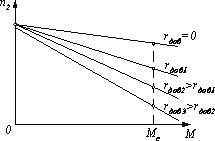
![]()
При цьому способі регулювання частоти обертання двигуна регулювальний реостат (додатковий активний опір), що включається в ланцюг ротора, повинен бути розрахований на тривалий режим роботи. Тому пускові реостати, розраховані на короткочасне проходження струму під час пуску, що неспроможні використовуватися як регулювальні.
Прямий пуск - найпоширеніший метод пуску асинхронного двигуна із короткозамкненим ротором. Двигун підключається безпосередньо до мережі живлення через пускач. При цьому асинхронний двигун з короткозамкненим ротором розвиває високий пусковий момент, що крутить, з відносно малим часом розгону. Цей метод зазвичай використовується для двигунів малої та середньої потужності, які досягають повної робочої частоти обертання за короткий час.
Прямий запуск. Цей спосіб застосовують для пуску асинхронних двигунів із короткозамкненим ротором. Двигуни цього типу малої та середньої потужності зазвичай проектують так, щоб при безпосередньому підключенні обмотки статора до мережі пускові струми, що виникають, не створювали надмірних електродинамічних зусиль і перевищень температури, небезпечних з точки зору механічної і термічної міцності основних елементів машини.
В асинхронних двигунах відношення L/R порівняно мало (особливо у малих двигунах), тому перехідний процес у момент включення характеризується дуже швидким згасанням вільного струму. Це дозволяє знехтувати вільним струмом і враховувати тільки значення струму перехідного процесу, що встановилося.
Двигуни зазвичай пускають за допомогою електромагнітного вимикача - магнітного пускача (рис. 4.27, а) і розганяють автоматично за природною механічною характеристикою М (рис. 4.27,6) від точки П, що відповідає початковому моменту пуску, до точки Р, що відповідає умові М = Мст . Прискорення при розгоні визначається різницею абсцис кривих М і Мст і моментом інерції ротора двигуна та механізму, що приводиться у обертання. Якщо початковий момент пуску Мп< Мст, двигатель разогнаться не сможет.
Значення початкового пускового моменту можна одержати з формули (4.46а), прийнявши
Мп = m1 U12R"2 / (w1 [(R1 + R"2)2 + (X1 + Х"2)2]).
Відношення моментів Мп / Мном = kп.м називають кратністю початкового пускового моменту. Для двигунів з короткозамкненим ротором потужністю 0,6-100 кВт ГОСТ встановлено kп.м= 1,0÷2,0; потужністю 100-1000 кВт – kп.м = 0,7÷1,0.
Отримання кратностей пускового моменту, великих регламентованих ГОСТом, зазвичай небажано, оскільки це пов'язано або зі збільшенням активного опору ротора (див. 4.58), або зі зміною конструкції ротора (див. § 4.11), що погіршує енергетичні показники двигуна.
Недоліком даного способу пуску крім порівняно невеликого пускового моменту є великий кидок пускового струму, в п'ять - сім разів перевищує номінальне значення струму.
Незважаючи на зазначені недоліки, пуск двигуна шляхом безпосереднього підключення обмотки статора до мережі широко застосовують завдяки простоті та хорошим техніко-економічним властивостям двигуна з короткозамкненим ротором - низькою вартістю та високим енергетичним показниками (η, cos φ1, kм та ін.).
Пуск при зниженій напрузі. Такий пуск застосовують для асинхронних двигунів з короткозамкненим ротором великої потужності, а також двигунів середньої потужності при недостатньо потужних електричних мережах. Зниження напруги може здійснюватися такими шляхами:
а) перемиканням обмотки статора за допомогою перемикача з нормальної схеми на пускову схему Y. При цьому напруга, що подається на фази обмотки статора, зменшується в √3раз, що обумовлює зменшення фазних струмів у √3 разів і лінійних струмів у 3 рази. Після закінчення процесу пуску та розгону двигуна до номінальної частоти обертання обмотку статора перемикають назад на нормальну схему;
б) включенням до ланцюга обмотки статора на період пуску додаткових активних (резисторів) або реактивних (реакторів) опорів (рис. 4.28, а). При цьому на зазначених опорах створюються деякі падіння напруги ΔUдоб, пропорційні пусковому струму, внаслідок чого до обмотки статора подається знижена напруга. У міру розгону двигуна знижується ЕДСЕ2s, індукована в обмотці ротора, а отже, і пусковий струм. В результаті зменшується падіння напруги ΔUдоб на зазначених опорах і автоматично зростає прикладена до двигуна напруга. Після закінчення розгону додаткові резистори або реактори замикаються коротко контактором К1 ;
в) підключенням двигуна до мережі через знижувальний автотрансформатор АТр (рис. 4.28,6), який може мати кілька ступенів, що перемикаються у процесі запуску відповідною апаратурою.
Недоліком зазначених методів пуску шляхом зниження напруги є значне зменшення пускового та максимального моментів двигуна, які пропорційні квадрату напруги, тому їх можна використовувати тільки при пуску двигунів без навантаження.
На рис. 4.29 для прикладу наведено механічні характеристики двигуна при номінальній та зниженій напрузі, тобто при з'єднанні обмотки статора за схемами Y і Δ, а також графіки зміни струму I1 та моменту М при пуску двигуна шляхом перемикання обмотки статора з Y на Δ. При з'єднанні за схемою Y максимальний і пусковий момент зменшуються втричі, внаслідок чого двигун не в змозі здійснити пуск механізму з моментом навантаження Мн.
Пуск у хід асинхронного двигуна
У момент запуску n=0, тобто. ковзання S=1. Т.к. струми в обмотках ротора і статора залежать від ковзання і зростають при його збільшенні, пусковий струм двигуна в 5 ÷ 8 разів більший за його номінальний струм
Iпуск=(5÷8)Ін.
Як розглядалося раніше, через велику частоту ЕРС ротора асинхронні двигуни мають обмежений пусковий момент.
Mпуск=(0,8÷1,8)Mн.
Для пуску в хід двигуна необхідно, щоб пусковий момент, що розвивається, перевищуючи момент навантаження на валу. Залежно від потужності джерел живлення та умов пуску використовують різні способи пуску, які мають на меті: зменшення пускового струму та збільшення пускового моменту.
Розрізняють такі способи пуску в хід асинхронних двигунів: пряме включення в ланцюг, пуск при зниженій напрузі, реостатний пуск використання двигунів з поліпшеними пусковими властивостями.
2.11.1. Пряме включення до мережі
Це найпростіший і найдешевший спосіб запуску. На двигун вручну або за допомогою дистанційного керування подається номінальна напруга. Пряме включення в мережу допускається, якщо потужність двигуна не перевищує 5% потужності трансформатора, якщо від нього живиться і освітлювальна мережа. Обмеження потужності пояснюється кидками струму в момент пуску, що призводить до зниження напруги на затискачах вторинних обмоток трансформатора. Якщо трансформатора не живиться освітлювальна мережу, то пряме включення в мережу можна застосовувати для двигунів, потужність яких не перевищує 25% від потужності трансформатора.
2.11.2. Пуск при зниженій напрузі
Цей спосіб застосовують при пуску в хід потужних двигунів, для яких неприпустимим є пряме включення в мережу. Для зниження підводиться до обмотки статора напруги використовують дроселі та знижувальні автотрансформатори. Після пуску на обмотку статора подається напруга мережі.
Зниження напруги роблять з метою зменшення пускового струму, але одночасно, як це випливає з рис. 2.17 та 2.17.б, відбувається зменшення пускового моменту. Якщо напруга при пуску зменшити в раз, пусковий момент знизиться в 3 рази. Тому цей метод пуску можна використовувати лише за відсутності навантаження на валу, тобто. у режимі холостого ходу.
Якщо згідно з паспортними даними двигун повинен включатися в мережу за схемою трикутник, то для зниження пускового струму на час пуску в хід обмотку статора включають за схемою зірка.
Основні недоліки цього способу пуску: висока вартість пускової апаратури та неможливість пуску з навантаженням на валу.
Працюючи багатьох механізмів, що приводяться у обертання асинхронними двигунами, відповідно до технологічними вимогами виникає необхідність регулювати швидкість обертання цих механізмів. Способи регулювання частоти (швидкості) обертання асинхронних двигунів розкриває співвідношення:
n=(1−S)n0=(1−S)60f/p.
Звідси випливає, що при заданому навантаженні на валу частоту обертання ротора можна регулювати:
зміною ковзання;
зміною числа пар полюсів;
зміною частоти джерела живлення.
2.12.1. Зміна ковзання
Цей спосіб використовують у приводі механізмів, де встановлені асинхронні двигуни з фазним ротором. Наприклад, у приводі підйомно-транспортних машин. У ланцюг фазного ротора вводиться регулювальний реостат. Збільшення активного опору ротора впливає величину критичного моменту, але збільшує критичне ковзання (рис. 2.21).
На рис. 2.21 наведено механічні характеристики асинхронного двигуна при різних опорах регулювального реостата Rр3> Rр2> 0, Rр1 = 0.
Як випливає з рис. 2.21 при цьому способі можна отримати великий діапазон регулювання частоти обертання у бік зниження. Основні недоліки цього способу:
Через великі втрати на регулювальному реостаті знижується коефіцієнт корисної дії, тобто. спосіб неекономічний.
Механічна характеристика асинхронного двигуна із збільшенням активного опору ротора стає м'якшою, тобто. знижується стійкість роботи двигуна.
Неможливо плавно регулювати частоту обертання.
Через перераховані недоліки цей спосіб застосовують для короткочасного зниження частоти обертання.
Регулювання частоти обертання асинхронних двигунів
З формули слід, що частоту обертання ротора асинхронного двигуна можна регулювати наступними способами: зміною частоти f1 напруги живлення, числа пар полюсів p і величини ковзання s.
Частотне регулювання. Цей спосіб дозволяє плавно змінювати частоту обертання широкому діапазоні. Для його здійснення потрібно, щоб двигун отримував живлення окремого джерела (рисунок 2.18).
В якості такого джерела в даний час найбільше застосовують напівпровідникові статичні перетворювачі частоти.
Залежно від вимог до механічних характеристик асинхронного двигуна при частотному регулюванні одночасно зі зміною частоти f1 доводиться за певним законом змінювати напругу U1, що підводиться до обмотки статора.
Максимальний момент двигуна приблизно (без урахування опору r1) визначається (2.40),
![]() .
.
Враховуючи, що ,,, отримаємо
Якщо при регулюванні частоти обертання потрібно, щоб за будь-якої частоти f1 максимальний момент залишався незмінним (регулювання з ), то отримаємо
звідки випливає, що для регулювання n2 при необхідно напруга U1, що підводиться до обмотки статора, змінювати пропорційно його частоті. У цьому основний магнітний поток машины при різних значеннях частоти f1 залишається незмінним, тобто.
![]() (2.56)
(2.56)
Механічні характеристики асинхронного двигуна при регулюванні сMмакс = const показані малюнку 2.19.
Недоліком частотного регулювання є відносно висока вартість перетворювальних установок.
Регулює частоту обертання зміною числа пар полюсів статорної обмотки. Для здійснення цього регулювання на статорі в загальних пазах розміщують не одну, а дві обмотки, маю-
різні кроки і, отже, різна кількість пар полюсів. Залежно від необхідної частоти обертання до мережі підключається та чи інша обмотка. Цей спосіб застосовується порівняно рідко, оскільки має суттєвий недолік - мале використання обмотувального дроту (у роботі знаходиться лише одна з обмоток).
Значно частіше зміна числа пар полюсів досягається зміною (перемиканням) схеми з'єднань статора обмотки. Принцип такого перемикання показано малюнку 2.20.
При переході з послідовного з'єднання двох котушок на паралельне число пар полюсів змінюється з 2 на 1. За наявності фазної обмотки на роторі її також необхідно перемикати одночасно з обмоткою статора, що є великим недоліком. Тому даний спосіб регулювання частоти обертання застосовується лише у двигунів із короткозамкненим ротором.
Асинхронні двигуни з перемиканням числа пар полюсів називають багатошвидкісними. Вони випускаються на дві, три та чотири частоти обертання. Відомо велике число схем, що дозволяє здійснювати перемикання пар полюсів. Ці схеми поділяються на схеми регулювання з постійним моментом та схеми регулювання з постійною потужністю. Механічні характеристики двошвидкісних двигунів показано малюнку 2.21.
Рисунок 2.20 – Зміна числа пар полюсів перемиканням котушок обмотки:
а – дві пари полюсів; б – одна пара полюсів
Малюнок 2.21 – Механічні характеристики двошвидкісного двигуна
з перемиканням числа пар полюсів щодо 2:1
при постійному моменті (а) та при постійній потужності (б)
З усіх способів регулювання частоти обертання асинхронних двигунів спосіб перемикання числа пар полюсів є найбільш економічним, хоча він має недоліки:
– двигуни мають відносно великі габарити та масу порівняно з двигунами нормального виконання;
- Регулювання частоти обертання ступінчасте.
Багатошвидкісні двигуни застосовують для електроприводу верстатів та різних механізмів, частоту обертання яких потрібно регулювати в широких межах (наприклад, ліфтові асинхронні двигуни).
Регулює частоту обертання за рахунок зміни напруги живлення. Зазначене регулювання можна здійснити за допомогою тиристорного регулятора напруги РН (рисунок 2.22).
Так як крутний момент асинхронного двигуна пропорційний, то механічні характеристики при напругах, менших за номінальний, підуть нижче природної (рисунок 2.23).
Якщо момент опору MС залишається постійним, то як випливає з малюнка 2.23, при зниженні напруги ковзання двигуна
збільшується.
Частота обертання ротора у своїй зменшується.
Регулювання ковзання цим способом можливе в межах
0 < s < sкр.
Подальше зниження напруги (нижче U1(2)) неприпустимо, тому що при цьому Mмакс< MС и двигательостановится.
Регулювання частоти обертання двигунів зміною напруги U1, що підводиться, має істотний недолік: в цьому випадку збільшуються втрати і, таким чином, знижується ККД двигуна. При зниженні напруги пропорційно U1 зменшується основний магнітний потік машини, внаслідок чого при M = MС = const зростають струм в обмотці ротора і, отже, електричні втрати в роторі. Магнітні втрати сталі статора зменшуються. Зазвичай при навантаженнях двигунів, близьких до номінальної, зниження U1 призводить до збільшення сумарних втрат та підвищення нагрівання двигунів. Тому аналізований спосіб регулювання частоти обертання знаходить застосування головним чином для машин невеликої потужності.
Регулює частоту обертання асинхронних двигунів шляхом включення в ланцюг ротора додаткового активного опору. Даний спосіб регулювання застосовується лише у двигунах із фазним ротором. Він дозволяє плавно змінювати частоту обертання у межах (малюнок 2.24). Недоліками його є великі втрати енергії в додаткових опорах, надмірно «м'яка» механічна характеристика двигуна при великому опорі в ланцюгу ротора. У деяких випадках останнє є неприпустимим, оскільки невеликій зміні навантажувального моменту відповідає істотна зміна частоти обертання. Насправді цей спосіб застосовується, головним чином, регулювання частоти обертання невеликих двигунів, наприклад, в підйомних пристроях. ![]()
При цьому способі регулювання частоти обертання двигуна регулювальний реостат (додатковий активний опір), що включається в ланцюг ротора, повинен бути розрахований на тривалий режим роботи. Тому пускові реостати, розраховані на короткочасне проходження струму під час пуску, що неспроможні використовуватися як регулювальні.
З курсу електротехніки відомо, що при пуску асинхронні електродвигуни споживають з мережі живлення значні пускові струми. Справді, у момент запуску ковзання асинхронного електродвигуна s=1, в номінальному режимі воно не перевищує 0,05. Це означає, що в момент пуску магнітне поле статора, що обертається, в 20 разів частіше перетинає обмотку ротора.
Однак пусковий струм у статорній та роторної обмоткизазвичай не перевищує номінальний струмбільш ніж 7-8 разів, оскільки у момент пуску індуктивне опір роторної ланцюга різко підвищується рахунок збільшення частоти струму. Відомо, що індуктивний опір будь-якого ланцюга може бути визначено наступним виразом:
де L-індуктивність ланцюга.
У момент пуску частота струму в обмотці ротора за прийнятих вище умов ( s пуск = 1; s ном = 0,05) у 20 разів вище, ніж у номінальному режимі. Тому повний опір роторного ланцюга Z = ?R 2 + x L 2 при пуску набагато вище, ніж номінальний режим. Цим і пояснюється той факт, що струм у момент пуску не в 20 разів перевищує своє номінальне значення, а лише 7-8.
Для самого електродвигуна підвищені пускові струми великої небезпеки не становлять, оскільки вони протікають протягом порівняно короткого проміжку часу і перегріти обмотки не встигають. Однак.підвищені пускові струми призводять до великих провалів напруги в мережі живлення, що вкрай несприятливо позначається на роботі інших споживачів. Це змушує застосовувати низку спеціальних заходів, що обмежують пускові струми асинхронних електродвигунів.
Слід мати на увазі, що асинхронні електродвигуни, маючи великий -пусковий струм, мають порівняно невеликий пусковим моментом, оскільки в момент пуску коефіцієнт потужності роторної тріски і дуже низький. Обертаючий момент, що розвивається асинхронним електродвигуном, згідно з виразом (96), пропорційний як струму ротора, а й коефіцієнту потужності роторної «ланцюга.
Тому штучні схеми пуску асинхронних електродвигунів, що розглядаються нижче, часто мають на меті не тільки зниження пускових струмів, а й підвищення пускових моментів.
Пуск електродвигунів із фазним ротором . Асинхронні електродвигуни з фазним ротором, тобто з ротором, що мають контактні кільця, пускаються в ос за допомогою пускового реостата, включеного в ланцюг ротора (див. рис. 40, а ). Введення реостату зменшує пусковий струм і дозволяє отримати потрібний пусковий момент аж до M крит . Вираз (93)показує, що величина ковзання s крит , коли має місце максимальний момент, залежить від активного опору фази ротора. Отже, підібравши відповідну величину цього опору, можна отримати момент, близький за величиною до М крит (Див. рис. 43 і 44).
Розрахунок пускового реостату зручно проводити графо-аналітичним способом, що має багато спільного з раніше розглянутими способами для електродвигунів постійного струму.
Щоб розрахувати пусковий реостат, необхідно знати номінальні дані електродвигуна та мати його природну механічну характеристику п = f(М): Остання може бути легко побудована, як відомо, по двох точках - по синхронній швидкості при нульовому моменті і номінальної швидкості при номінальному (моменті. Маючи ці дані, можна проводити розрахунок пускового реостату за наступною методикою.
1. Вибираються межі зміни крутного моменту при пуску М m ах і М min та відкладаються на пусковій діаграмі (рис. 47). При виборі моментів слід керуватися тим, що максимальний момент при пуску повинен бути дещо меншим за перекидальний момент, а мінімальний момент- дещо вищий за момент статичного опору М з , причому, чим менше вибрано різницю ( М m ах -М min ), тим більше ступенів матиме пусковий реостат і тим плавніше і швидше відбуватиметься пуск електродвигуна.
2. Пуск електродвигуна повинен починатися з точки 1 , оскільки при рушанні з місця електродвигун, за прийнятою умовою, повинен розвивати момент М m ах при n= 0. Отже, перша пускова характеристика а, що відповідає повністю включеному пусковому реостату, має проходити через точки п 0 і 1 . Швидкість електродвигуна зростатиме, оскільки М m ах > M c , Т. е. є надлишковий момент, що повідомляє механізму прискорення. Зі збільшенням швидкості крутний момент буде зменшуватися, і при досягненні ним значення М min (крапка2 ) повинен бути відключений перший ступінь пускового реостату.
3. При відключенні першого ступеня відбувається перехід електродвигуна працювати з характеристики ана характеристику b, що відповідає включеному пусковому реостату без першого ступеня. За час відключення першого ступеня швидкість електродвигуна практично не встигає змінитися, тому можна вважати, що перехід з однієї характеристики на іншу відбувається горизонтальною прямою 2 -3 та характеристика bпроходить через крапки п 0 та 3.
4. Подальший розгін електродвигуна відбувається за характеристикою bдоки крутний момент знову не знизиться до значення М min . При цьому має бути відключено другий ступінь реостату і електродвигун перейде на роботу за характеристикою з. Перехід відбувається по горизонтальній прямій 4 -5 , а характеристика проходить через точки n 0 і 5 .
5. Коли при роботі на характеристиці з моменту знову знизиться до значення M min , відключається третій останній ступінь пускового реостату та електродвигун переходить на роботу за природною характеристикою d. На цій характеристиці розгін електродвигуна триває доти, доки його крутний момент стане рівним моменту статичного опору. Після цього розгін припиниться і електродвигун працюватиме з швидкістю, що встановилася.
Слід зазначити, що у розглянутому випадку число щаблів пускового реостату заздалегідь вибрано. Тому моменти М m ах і М min повинні бути обрані так, щоб при відключенні третього ступеня електродвигун переходив на природну характеристику d. Якщо цього немає, необхідно трохи змінити значення моментів M мах і М min і повторити шикування. У тому випадку, коли число ступенів не обмежується, побудова ведеться доти, доки відбувається перехід на природну характеристику. Число ступенів реостата визначається в цьому випадку за пусковою діаграмою.
6. Користуючись пусковою діаграмою (див. рис. 47), неважко визначити опір всього реостату, так і окремих його ступенів. Неважко довести, що відрізок 7 -9 представляє в масштабі опорів активний опір фази обмотки ротора, а відрізок 1 - 7 у тому масштабі - повний активний опір фази пускового реостата. Відрізки 1 -3 , 3 -5 і 5 -7 представляють відповідно величини активних опорів першого, другого та третього ступенів пускового реостату.
Масштаб опорів може бути визначений за виразом
де 7 -9 - Відрізок на діаграмі в одиницях довжини;
R 2 - активний опір однієї фази ротора, який може бути взято з паспортних даних електродвигуна або визначено шляхом вимірювання або наближеного розрахунку за формулою
де s-номінальне ковзання;
т 2 - Число фаз ротора;
I 2 -номінальний струм у фазі.ротора;
М-Номінальний крутний момент.
Розглянутий спосіб пуску асинхронних електродвигунів з фазним ротором відрізняється простотою, надійністю. Він дозволяє знизити величину.пускового струму і підвищити, при необхідності, пусковий момент аж до моменту, що перекидає. Недоліком даного способу слід вважати значні втрати енергії в пускових реостатах, а також великі габарити останніх при великій кількості щаблів. Щоб уникнути застосування надто громіздких пускових реостатів, у кранових схемах часто застосовують реостати з так званою несиметричною схемою, коли опір виводиться не одночасно з трьох фаз роторного ланцюга, а поступово.
У початковий момент пуску в роторний ланцюг електродвигуна введено весь опір. Потім поступово, у міру розгону електродвигуна, за допомогою барабанного або кулачкового контролера виводиться перший ступінь опору ланцюга першої фази, потім другий, потім третьої; при наступному положенні контролера виводиться другий ступінь опору з ланцюга першої фази і так до тих пір, поки при останньому положенні контролера не буде виведено весь опір і замкнений коротко ланцюг ротора.
Такий спосіб пуску створює деяку асиметрію струмів роторного ланцюга, що, однак, небезпеки для електродвигуна не представляє і дозволяє в той же час зменшити габарити пускових реостатів і контролерів.
Пуск електродвигунів із короткозамкненим ротором.
Пуск потужних асинхронних електродвигунів з короткозамкненим ротором пов'язаний з низкою труднощів, оскільки обмеження пускових струмів введенням додаткових опорів. ланцюг ротора застосувати у разі неможливо. Як правило, в підйомно-транспортних машинах знаходять застосування електродвигуни з короткозамкненим ротором порівняно невеликої потужності, внаслідок чого необхідності обмеження пускових струмів зазвичай не виникає.
При живленні асинхронного електродвигуна з короткозамкненим ротором від потужності мережі пуск у більшості випадків здійснюється шляхом підключення обмотки статора до повної напруги мережі живлення, як показано на рис. 48, а.
Якщо потужність електродвигуна можна порівняти з потужністю мережі, пускові струми викликають неприпустимо великі падіння напруги, що погіршує умови роботи інших споживачів, які живляться від тієї самої мережі; у цьому випадку необхідно вживати заходів, що обмежують пускові струми.
При пуску безпосереднім включенням на повну напругу статора обмотка підключається до мережі простим включенням відповідного апарату - рубильника, контактора, магнітного пускача і т. п. При цьому має місце поштовх пускового струму, який в 7-8 разів перевищує номінальний струм електродвигуна. Потрібно мати на увазі, що поштовх струму в момент пуску залежить не від навантаження, а від величини опору електродвигуна обмоток і напруги мережі. У зв'язку з цим, якщо виникає необхідність зниження пускових струмів, до електродвигуна в момент пуску підводять знижену напругу.
Зниження напруги, що підводиться до обмотки статора, може бути здійснено:
а) перемиканням обмотки статора із зірки на трикутник;
б) за допомогою активного опору, що входить у ланцюг статора;
в) застосуванням автотрансформатора.
Загальним всім зазначених способів є зниження пускового струму електродвигуна при одночасному зменшенні його пускового моменту, який, як відомо, пропорційний квадрату напруги. Це означає, що аналізований спосіб пуску застосовується лише за невеликих моментах опору.
Пуск перемиканням статорної обмотки із зірки на трикутник застосовується найчастіше для асинхронних електродвигунів із короткозамкненим ротором, у яких за нормальної роботи обмотка статора з'єднана трикутником. Принцип роботи схеми (рис. 48, б) полягає в тому, що в початковий період пуску статора обмотка включається зіркою і приєднується до мережі. Коли електродвигун розвине деяку швидкість, обмотку перемикають на трикутник. Очевидно, що величина пускового струму при з'єднанні зіркою в ?3 разів менше, ніж при з'єднанні трикутником, так як величина напруги, що підводиться до кожної фази електродвигуна, в першому випадку в? Щоправда, пусковий момент буде втричі меншим. Як показано на рис. 48, бдля здійснення пуску електродвигуна даним способом ніякої складної апаратури не потрібно. Пуск електродвигуна здійснюється звичайним триполюсним перемикачем Р.
Порівняно рідко використовується малоекономічний спосіб пуску за допомогою активного опору, що входить у ланцюг обмотки статора. Цей спосіб пуску застосовують лише в тих випадках, коли обмотка статора електродвигуна за нормальної роботи повинна бути включена зіркою. При пуску спочатку замикається рубильник Р 1 (Рис. 48, в). При цьому статорна обмотка підключається до мережі через реостат. R. Коли електродвигун розвине кілька обертів, замикається рубильник Р 2 та реостат шунтується.
Досить рідко застосовується пуск асинхронних електродвигунів за допомогою автотрансформатора. В цьому випадку в перший період запуску шестиполюсний перемикач П(Рис. 48, г) ставиться у становище 1 і до затискачів статора через автотрансформатор Тпідводиться знижена напруга. Коли електродвигун розженеться, перемикач ставиться в положення 2 та статор виявляється під повною напругою мережі.
Загальним недоліком всіх розглянутих способів пуску асинхронних електродвигунів з короткозамкненим ротором зниженої напругиє значне зниження пускового моменту.
Щоб обмежити пусковий струм без одночасного зниження пускового моменту, необхідно на час пуску збільшити опір обмотки ротора. Для цього на роторі поміщають не одну, а дві короткозамкнуті обмотки (двоклітинні електродвигуни) або виконують ротори з так званим глибоким пазом.
Двоклітинні асинхронні електродвигуни та електродвигуни з глибоким пазом мають більший пусковий момент і меншу кратність пускового струму, ніж короткозамкнуті електродвигунизвичайного виконання, проте вартість перших значно вища і застосовують їх порівняно рідко.