การสตาร์ทโดยตรงเป็นวิธีการทั่วไปในการสตาร์ทมอเตอร์เหนี่ยวนำด้วย โรเตอร์กรงกระรอก. มอเตอร์เชื่อมต่อโดยตรงกับไฟหลักผ่านสตาร์ทเตอร์ ในกรณีนี้ มอเตอร์เหนี่ยวนำแบบกรงกระรอกจะพัฒนาแรงบิดในการสตาร์ทที่สูงด้วยเวลาเร่งความเร็วที่ค่อนข้างสั้น วิธีนี้มักใช้สำหรับมอเตอร์ไฟฟ้าขนาดเล็กถึงขนาดกลางที่มีความเร็วการทำงานเต็มที่ในเวลาอันสั้น
เริ่มต้นโดยตรง วิธีนี้ใช้เพื่อเริ่มต้น มอเตอร์เหนี่ยวนำด้วยโรเตอร์กรงกระรอก มอเตอร์ของพลังงานต่ำและปานกลางประเภทนี้มักจะได้รับการออกแบบเพื่อให้เมื่อขดลวดสเตเตอร์เชื่อมต่อโดยตรงกับเครือข่าย กระแสเริ่มต้นที่เป็นผลลัพธ์จะไม่สร้างแรงไฟฟ้าพลศาสตร์มากเกินไปและการเพิ่มขึ้นของอุณหภูมิที่เป็นอันตรายจากมุมมองของกลไกและ ความแข็งแรงทางความร้อนขององค์ประกอบหลักของเครื่อง
ในมอเตอร์แบบอะซิงโครนัส อัตราส่วน L/R ค่อนข้างเล็ก (โดยเฉพาะอย่างยิ่งในมอเตอร์ขนาดเล็ก) ดังนั้นช่วงเวลาชั่วครู่ในขณะที่เปิดเครื่องจะมีลักษณะเฉพาะด้วยการลดทอนอย่างรวดเร็วของกระแสอิสระ ทำให้สามารถละเลยกระแสอิสระและคำนึงถึงเฉพาะค่าคงที่ของกระแสชั่วคราวเท่านั้น
มอเตอร์มักจะเริ่มต้นโดยใช้สวิตช์แม่เหล็กไฟฟ้า K - สตาร์ทแม่เหล็ก (รูปที่ 4.27, a) และเร่งความเร็วโดยอัตโนมัติตามลักษณะทางกลตามธรรมชาติ M (รูปที่ 4.27.6) จากจุด P ซึ่งสอดคล้องกับช่วงเวลาเริ่มต้นเริ่มต้นไปยังจุด P ซึ่งสอดคล้องกับเงื่อนไข M = Mst การเร่งความเร็วระหว่างการเร่งถูกกำหนดโดยความแตกต่างระหว่าง abscissas ของเส้นโค้ง M และ Mst และโมเมนต์ความเฉื่อยของโรเตอร์มอเตอร์และกลไกที่ตั้งค่าให้หมุน ถ้าในช่วงเวลาเริ่มต้นของการเปิดตัว Mp< Мст, двигатель разогнаться не сможет.
ค่าของแรงบิดเริ่มต้นเริ่มต้นได้จากสูตร (4.46a) สมมติว่า
Mn \u003d m1 U12R "2 / (w1 [(R1 + R" 2) 2 + (X1 + X "2) 2])
อัตราส่วนของโมเมนต์ Mp / Mnom = kp.m เรียกว่าหลายหลากของแรงบิดเริ่มต้นเริ่มต้น สำหรับเครื่องยนต์ที่มีโรเตอร์กรงกระรอกที่มีกำลัง 0.6-100 กิโลวัตต์ GOST จะตั้งค่า kp.m = 1.0÷2.0; กำลัง 100-1000 kW - kp.m = 0.7÷1.0
การได้รับอัตราส่วนแรงบิดเริ่มต้นที่มากกว่าที่ควบคุมโดย GOST มักไม่เป็นที่พึงปรารถนา เนื่องจากอาจเป็นเพราะการเพิ่มขึ้น ความต้านทานที่ใช้งานโรเตอร์ (ดู 4.58) หรือเมื่อมีการเปลี่ยนแปลงการออกแบบของโรเตอร์ (ดู § 4.11) ซึ่งทำให้ประสิทธิภาพการใช้พลังงานของเครื่องยนต์แย่ลง
ข้อเสียของวิธีการเริ่มต้นนี้ นอกจากแรงบิดเริ่มต้นที่ค่อนข้างเล็กแล้ว ยังเป็นการส่งขนาดใหญ่อีกด้วย เริ่มต้นปัจจุบันห้าถึงเจ็ดเท่าของกระแสไฟที่กำหนด
แม้จะมีข้อบกพร่องเหล่านี้ การสตาร์ทเครื่องยนต์โดยการเชื่อมต่อโดยตรงกับขดลวดสเตเตอร์กับเครือข่ายนั้นมีการใช้กันอย่างแพร่หลาย เนื่องจากความเรียบง่ายและคุณสมบัติทางเทคนิคและเศรษฐกิจที่ดีของมอเตอร์กรงกระรอก - ต้นทุนต่ำและประสิทธิภาพพลังงานสูง (η, cos φ1, km, เป็นต้น)
แรงดันไฟฟ้าต่ำเริ่มต้น การสตาร์ทดังกล่าวใช้สำหรับมอเตอร์แบบอะซิงโครนัสที่มีโรเตอร์กรงกระรอกกำลังสูง เช่นเดียวกับมอเตอร์กำลังปานกลางที่มีเครือข่ายไฟฟ้ากำลังแรงไม่เพียงพอ การลดแรงดันไฟฟ้าสามารถทำได้ด้วยวิธีต่อไปนี้:
ก) โดยการเปลี่ยนขดลวดสเตเตอร์ด้วยสวิตช์จากวงจรปกติ Δ เป็นวงจรเริ่มต้น Y ในกรณีนี้ แรงดันไฟฟ้าที่ใช้กับเฟสของขดลวดสเตเตอร์จะลดลง √3 ครั้ง ซึ่งจะทำให้กระแสเฟสลดลงโดย √3 ครั้งและกระแสเชิงเส้น 3 ครั้ง เมื่อสิ้นสุดกระบวนการสตาร์ทและเร่งเครื่องยนต์ให้ถึงความเร็วที่กำหนด ขดลวดสเตเตอร์จะเปลี่ยนกลับเป็นวงจรปกติ
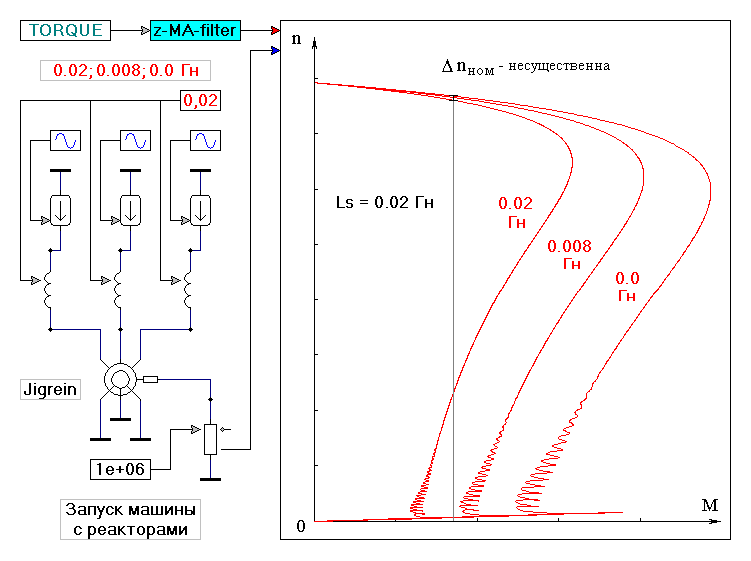
b) รวมอยู่ในวงจรขดลวดสเตเตอร์สำหรับช่วงเริ่มต้นของความต้านทานที่ใช้งานเพิ่มเติม (ตัวต้านทาน) หรือปฏิกิริยา (เครื่องปฏิกรณ์) (รูปที่ 4.28, a) ในกรณีนี้แรงดันตกคร่อม ΔUเพิ่มจะถูกสร้างขึ้นบนความต้านทานที่ระบุ ซึ่งเป็นสัดส่วนกับกระแสเริ่มต้น ซึ่งเป็นผลมาจากแรงดันไฟฟ้าที่ลดลงถูกนำไปใช้กับขดลวดสเตเตอร์ ในขณะที่มอเตอร์เร่งความเร็ว EDSE2s ที่เหนี่ยวนำในการหมุนของโรเตอร์จะลดลง และด้วยเหตุนี้ กระแสเริ่มต้น เป็นผลให้แรงดันไฟฟ้าตก ΔUเพิ่มความต้านทานที่ระบุลดลงและแรงดันไฟฟ้าที่ใช้กับมอเตอร์เพิ่มขึ้นโดยอัตโนมัติ หลังจากสิ้นสุดการเร่งความเร็ว ตัวต้านทานเพิ่มเติมหรือเครื่องปฏิกรณ์จะลัดวงจรโดยคอนแทคเตอร์ K1
c) การเชื่อมต่อมอเตอร์กับเครือข่ายผ่าน ATP ตัวแปลงอัตโนมัติแบบสเต็ปดาวน์ (รูปที่ 4.28.6) ซึ่งสามารถสลับได้หลายขั้นตอนในระหว่างกระบวนการเริ่มต้นโดยอุปกรณ์ที่เหมาะสม
ข้อเสียของวิธีการเริ่มต้นเหล่านี้โดยการลดแรงดันไฟฟ้าคือการลดลงอย่างมากในการเริ่มต้นและแรงบิดสูงสุดของมอเตอร์ซึ่งเป็นสัดส่วนกับกำลังสองของแรงดันไฟฟ้าที่ใช้ ดังนั้นจึงสามารถใช้ได้เฉพาะเมื่อสตาร์ทมอเตอร์โดยไม่มีโหลด
ในรูป ตัวอย่างเช่น 4.29 แสดงคุณสมบัติทางกลของมอเตอร์ที่พิกัดและแรงดันไฟฟ้าที่ลดลง กล่าวคือ เมื่อขดลวดสเตเตอร์เชื่อมต่อตามแบบแผน Y และ Δ เช่นเดียวกับกราฟของการเปลี่ยนแปลงของกระแส I1 และแรงบิด M เมื่อเริ่มต้น เครื่องยนต์โดยการเปลี่ยนขดลวดสเตเตอร์จาก Y เป็น Δ เมื่อเชื่อมต่อตามรูปแบบ Y แรงบิดสูงสุดและเริ่มต้นจะลดลงสามเท่าอันเป็นผลมาจากการที่มอเตอร์ไม่สามารถสตาร์ทกลไกด้วยแรงบิดโหลด Mn
การสตาร์ทมอเตอร์แบบอะซิงโครนัส
ณ เวลาที่เปิดตัว n=0, นั่นคือ สลิป S=1. เพราะ กระแสในโรเตอร์และขดลวดสเตเตอร์ขึ้นอยู่กับสลิปและเพิ่มขึ้นตามการเพิ่มขึ้นของกระแสเริ่มต้นของมอเตอร์คือ 5 ÷ 8 เท่าของกระแสที่กำหนด
Istart=(5÷8)เข้า
ตามที่กล่าวไว้ก่อนหน้านี้ เนื่องจากความถี่สูงของ EMF ของโรเตอร์ มอเตอร์เหนี่ยวนำจึงมีแรงบิดเริ่มต้นที่จำกัด
Mstart=(0.8÷1.8)Mn.
ในการสตาร์ทเครื่องยนต์ จำเป็นต้องให้แรงบิดในการสตาร์ทที่พัฒนาขึ้นมาเกินกว่าแรงบิดโหลดบนเพลา ขึ้นอยู่กับกำลังของแหล่งพลังงานและสภาวะการสตาร์ท ใช้วิธีการเริ่มต้นที่แตกต่างกันซึ่งมีเป้าหมายดังต่อไปนี้: การลดกระแสสตาร์ทและเพิ่มแรงบิดเริ่มต้น
มีวิธีต่อไปนี้ในการสตาร์ทมอเตอร์เหนี่ยวนำ: การเชื่อมต่อโดยตรงเป็นวงจร สตาร์ทแรงดันต่ำ สตาร์ทความต้านทาน ใช้มอเตอร์ที่มีคุณสมบัติการสตาร์ทที่ดีขึ้น
2.11.1. เชื่อมต่อโดยตรงกับเครือข่าย
นี่เป็นวิธีที่ง่ายและถูกที่สุดในการเริ่มต้น มอเตอร์มาพร้อมกับแรงดันไฟฟ้าที่กำหนดด้วยตนเองหรือโดยการควบคุมระยะไกล อนุญาตให้เชื่อมต่อโดยตรงกับเครือข่ายได้หากกำลังมอเตอร์ไม่เกิน 5% ของกำลังของหม้อแปลงไฟฟ้า หากเครือข่ายแสงสว่างนั้นใช้พลังงานจากเครือข่ายนั้นด้วย ข้อ จำกัด ด้านพลังงานอธิบายโดยกระแสไฟกระชากในขณะที่สตาร์ทซึ่งทำให้แรงดันไฟฟ้าลดลงที่ขั้วของขดลวดทุติยภูมิของหม้อแปลงไฟฟ้า หากเครือข่ายแสงสว่างไม่ได้มาจากหม้อแปลงไฟฟ้า การเชื่อมต่อโดยตรงกับเครือข่ายสามารถใช้กับมอเตอร์ที่มีกำลังไฟฟ้าไม่เกิน 25% ของกำลังของหม้อแปลงไฟฟ้า
2.11.2. สตาร์ทแรงดันไฟฟ้าลดลง
วิธีนี้ใช้เมื่อสตาร์ทมอเตอร์ทรงพลังซึ่งไม่สามารถเชื่อมต่อโดยตรงกับเครือข่ายได้ เพื่อลดแรงดันไฟฟ้าที่จ่ายให้กับขดลวดสเตเตอร์จะใช้โช้กและตัวเปลี่ยนรูปแบบอัตโนมัติแบบสเต็ปดาวน์ หลังจากสตาร์ทเครื่อง แรงดันไฟหลักจะถูกนำไปใช้กับขดลวดสเตเตอร์
แรงดันไฟฟ้าจะลดลงเพื่อลดกระแสเริ่มต้น แต่ในขณะเดียวกัน ดังรูปที่ 2.17 และ 2.17.b แรงบิดเริ่มต้นลดลง หากแรงดันไฟฟ้าเมื่อสตาร์ทเครื่องลดลงหนึ่งปัจจัย แรงบิดเริ่มต้นจะลดลง 3 เท่า ดังนั้น วิธีการเริ่มต้นนี้สามารถใช้ได้เฉพาะเมื่อไม่มีโหลดบนเพลาเท่านั้น กล่าวคือ ในโหมดว่าง
ถ้าตามข้อมูลหนังสือเดินทาง มอเตอร์ต้องเชื่อมต่อกับเครือข่ายตามรูปแบบสามเหลี่ยม จากนั้นเพื่อลดกระแสเริ่มต้นสำหรับเวลาเริ่มต้น ขดลวดสเตเตอร์จะเชื่อมต่อตามรูปแบบดาว
ข้อเสียเปรียบหลักของวิธีการเริ่มต้นนี้คือต้นทุนของอุปกรณ์เริ่มต้นที่สูงและความเป็นไปไม่ได้ที่จะเริ่มต้นด้วยภาระบนเพลา
ในระหว่างการทำงานของกลไกต่างๆ ที่ขับเคลื่อนด้วยมอเตอร์แบบอะซิงโครนัสตามข้อกำหนดทางเทคโนโลยี จำเป็นต้องควบคุมความเร็วของการหมุนของกลไกเหล่านี้ วิธีการควบคุมความถี่ (ความเร็ว) ของการหมุนของมอเตอร์แบบอะซิงโครนัสแสดงอัตราส่วน:
n=(1−S)n0=(1−S)60f/p
ตามนั้นสำหรับภาระที่กำหนดบนเพลา สามารถปรับความเร็วของโรเตอร์ได้:
เปลี่ยนสลิป;
เปลี่ยนจำนวนเสาคู่
การเปลี่ยนความถี่ของแหล่งจ่ายไฟ
2.12.1. เปลี่ยนสลิป
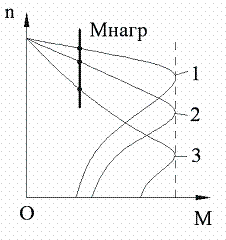
วิธีนี้ใช้ในการขับเคลื่อนกลไกที่ติดตั้งมอเตอร์แบบอะซิงโครนัสที่มีเฟสโรเตอร์ ตัวอย่างเช่นในการขับเคลื่อนของเครื่องจักรยกและขนส่ง มีการแนะนำตัวปรับค่ารีโอสแตทในวงจรโรเตอร์เฟส การเพิ่มความต้านทานเชิงรุกของโรเตอร์ไม่ส่งผลต่อขนาดของช่วงเวลาวิกฤต แต่เพิ่มการลื่นวิกฤต (รูปที่ 2.21)
ในรูป 2.21 แสดงคุณสมบัติทางกลของมอเตอร์แบบอะซิงโครนัสที่มีความต้านทานต่างกันของตัวปรับค่า Rp3> Rp2> 0, Rp1=0
จากรูปที่ 2.21 ด้วยวิธีนี้ คุณสามารถควบคุมความเร็วได้หลากหลาย ข้อเสียเปรียบหลักของวิธีนี้:
เนื่องจากการสูญเสียน้ำหนักที่มากเกินไปในการปรับรีโอสแตท ประสิทธิภาพจึงลดลง กล่าวคือ วิธีที่ไม่ประหยัด
ลักษณะทางกลของมอเตอร์แบบอะซิงโครนัสจะอ่อนลงเมื่อความต้านทานแบบแอคทีฟของโรเตอร์เพิ่มขึ้น กล่าวคือ ความเสถียรของเครื่องยนต์ลดลง
เป็นไปไม่ได้ที่จะปรับความเร็วอย่างราบรื่น
เนื่องจากข้อบกพร่องเหล่านี้ วิธีนี้จึงใช้สำหรับการลดความเร็วในการหมุนในระยะสั้น
การควบคุมความเร็วของมอเตอร์แบบอะซิงโครนัส
จากสูตรที่สามารถควบคุมความเร็วโรเตอร์ของมอเตอร์เหนี่ยวนำได้ดังนี้ โดยการเปลี่ยนความถี่ f1 ของแรงดันไฟ จำนวนของขั้วคู่ p และปริมาณสลิป s
การควบคุมความถี่ วิธีนี้ช่วยให้คุณเปลี่ยนความเร็วได้อย่างราบรื่นในช่วงกว้าง สำหรับการนำไปใช้งาน เครื่องยนต์จะต้องใช้พลังงานจากแหล่งที่แยกต่างหาก (รูปที่ 2.18) 
ตัวแปลงความถี่แบบคงที่ของเซมิคอนดักเตอร์จึงถูกใช้อย่างแพร่หลายที่สุดในปัจจุบัน
ขึ้นอยู่กับข้อกำหนดสำหรับคุณสมบัติทางกลของมอเตอร์แบบอะซิงโครนัสระหว่างการควบคุมความถี่พร้อมกับการเปลี่ยนแปลงความถี่ f1 จำเป็นต้องเปลี่ยนแรงดันไฟฟ้า U1 ที่จ่ายให้กับขดลวดสเตเตอร์ตามกฎหมายบางประการ
แรงบิดสูงสุดของมอเตอร์อยู่ที่ประมาณ (โดยไม่คำนึงถึงความต้านทาน r1) ซึ่งกำหนดโดย (2.40)
![]() .
.
เมื่อพิจารณาว่า ,,, เราได้
หากเมื่อควบคุมความเร็วจำเป็นต้องมีความถี่ f1 แรงบิดสูงสุดยังคงไม่เปลี่ยนแปลง (ควบคุมด้วย) เราก็จะได้
ดังนั้นเพื่อควบคุม n2 จำเป็นต้องเปลี่ยนแรงดันไฟฟ้า U1 ที่จ่ายให้กับขดลวดสเตเตอร์ตามสัดส่วนของความถี่ ในกรณีนี้ ฟลักซ์แม่เหล็กหลักของเครื่องที่ค่าต่างๆ ของความถี่ f1 ยังคงไม่เปลี่ยนแปลง กล่าวคือ
![]() (2.56)
(2.56)
ลักษณะทางกลของมอเตอร์แบบอะซิงโครนัสระหว่างการควบคุมด้วย Mmax = const แสดงในรูปที่ 2.19 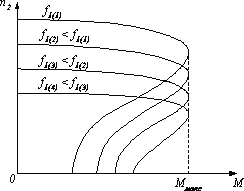
ข้อเสียของการควบคุมความถี่คือต้นทุนการติดตั้งคอนเวอร์เตอร์ที่ค่อนข้างสูง
ควบคุมความเร็วด้วยการเปลี่ยนจำนวนคู่ของเสาขดลวดสเตเตอร์ ในการดำเนินการตามข้อบังคับนี้ไม่ได้วางขดลวดสองอันบนสเตเตอร์ในร่องทั่วไปโดยมี 
สำหรับพิทช์ที่แตกต่างกันและจำนวนของเสาคู่ที่แตกต่างกัน ขึ้นอยู่กับความเร็วที่ต้องการ ขดลวดหนึ่งหรือหลายอันเชื่อมต่อกับเครือข่าย วิธีนี้ใช้ค่อนข้างน้อย เนื่องจากมี ข้อเสียที่สำคัญ- ใช้ลวดม้วนต่ำ (ขดลวดเดียวเท่านั้นที่ทำงานอยู่)
บ่อยครั้งที่การเปลี่ยนแปลงจำนวนขั้วคู่ทำได้โดยการเปลี่ยน (สลับ) ไดอะแกรมการเชื่อมต่อของขดลวดสเตเตอร์ หลักการของการเปลี่ยนดังกล่าวแสดงในรูปที่ 2.20
เมื่อเปลี่ยนจากการเชื่อมต่อแบบอนุกรมของขดลวดสองขดลวดไปเป็นขดลวดคู่ขนาน จำนวนขั้วคู่จะเปลี่ยนจาก 2 เป็น 1 หากมีเฟสที่คดเคี้ยวบนโรเตอร์ จะต้องสลับพร้อมกันกับขดลวดสเตเตอร์ด้วย ซึ่งก็คือ ข้อเสียใหญ่ ดังนั้นวิธีการควบคุมความเร็วนี้จึงใช้สำหรับมอเตอร์ที่มีโรเตอร์แบบกรงกระรอกเท่านั้น
มอเตอร์แบบอะซิงโครนัสที่มีการสลับจำนวนขั้วคู่เรียกว่าความเร็วหลายระดับ มีให้เลือกในความเร็วสอง สาม และสี่ เป็นที่ทราบกันดีว่ามีวงจรจำนวนมากที่สามารถสลับจำนวนคู่ขั้วได้ โครงร่างเหล่านี้แบ่งออกเป็นแผนการควบคุมแรงบิดคงที่และแผนการควบคุมกำลังคงที่ ลักษณะทางกลของมอเตอร์สองความเร็วแสดงอยู่ใน รูปที่ 2.21

รูปที่ 2.20 - การเปลี่ยนจำนวนคู่ขั้วโดยสลับขดลวดที่คดเคี้ยว:
a – เสาสองคู่; b - เสาหนึ่งคู่
รูปที่ 2.21 - ลักษณะทางกลของมอเตอร์สองความเร็ว
ด้วยการสลับจำนวนขั้วคู่ในอัตราส่วน 2:1
ที่แรงบิดคงที่ (a) และกำลังคงที่ (b)
ในทุกวิธีในการควบคุมความเร็วของมอเตอร์แบบอะซิงโครนัส วิธีการเปลี่ยนจำนวนขั้วคู่เป็นวิธีที่ประหยัดที่สุด แม้ว่าจะมีข้อเสียเช่นกัน:
- เครื่องยนต์มีขนาดและน้ำหนักค่อนข้างมากเมื่อเทียบกับเครื่องยนต์แบบปกติ
- การควบคุมความเร็วขั้นตอน
มอเตอร์หลายความเร็วใช้เพื่อขับเคลื่อนเครื่องมือกลและกลไกต่างๆ ซึ่งจะต้องควบคุมความเร็วในการหมุนในช่วงกว้าง (เช่น มอเตอร์แบบอะซิงโครนัสของลิฟต์)
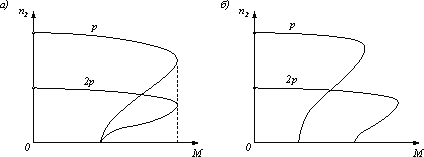
ควบคุมความเร็วด้วยการเปลี่ยนแรงดันไฟ ระเบียบที่ระบุไว้สามารถทำได้โดยใช้ตัวควบคุมแรงดันไฟฟ้าไทริสเตอร์ PH (รูปที่ 2.22) 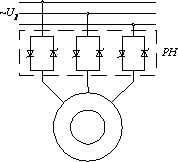
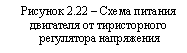
เนื่องจากแรงบิดของมอเตอร์เหนี่ยวนำเป็นสัดส่วน ลักษณะทางกลของแรงดันไฟฟ้าที่น้อยกว่าแรงดันไฟฟ้าที่กำหนดจะต่ำกว่าค่าปกติ (รูปที่ 2.23) 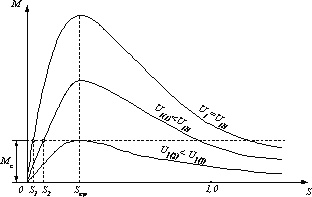
หากโมเมนต์ความต้านทาน MC คงที่ ดังรูป 2.23 เมื่อแรงดันตก สลิปของมอเตอร์
เพิ่มขึ้น
ในกรณีนี้ ความเร็วของโรเตอร์จะลดลง
การควบคุมสลิปด้วยวิธีนี้เป็นไปได้ภายใน
0 < s < sкр.
แรงดันไฟฟ้าที่ลดลงอีก (ต่ำกว่า U1(2)) ไม่เป็นที่ยอมรับ เนื่องจากในกรณีนี้ Mmax< MС и двигательостановится.
การควบคุมความเร็วของมอเตอร์โดยการเปลี่ยนแรงดันไฟฟ้าขาเข้า U1 มีข้อเสียเปรียบที่สำคัญ: ในกรณีนี้การสูญเสียเพิ่มขึ้นและดังนั้นประสิทธิภาพของมอเตอร์จึงลดลง เมื่อแรงดันไฟฟ้าลดลงตามสัดส่วนของ U1 ฟลักซ์แม่เหล็กหลักของเครื่องจะลดลงซึ่งเป็นผลมาจากการที่ M = MС = const กระแสในขดลวดของโรเตอร์จะเพิ่มขึ้นและทำให้สูญเสียทางไฟฟ้าในโรเตอร์ การสูญเสียแม่เหล็กในเหล็กสเตเตอร์จะลดลง โดยปกติเมื่อโหลดของมอเตอร์ใกล้เคียงกับค่าที่กำหนด การลดลงของ U1 จะทำให้การสูญเสียทั้งหมดเพิ่มขึ้นและความร้อนของมอเตอร์เพิ่มขึ้น ดังนั้นวิธีการควบคุมความเร็วที่พิจารณาจึงใช้สำหรับเครื่องจักรที่มีกำลังน้อยเป็นหลัก
การควบคุมความเร็วของมอเตอร์แบบอะซิงโครนัสโดยรวมความต้านทานแบบแอคทีฟเพิ่มเติมในวงจรโรเตอร์ วิธีการควบคุมนี้ใช้เฉพาะในมอเตอร์ที่มีเฟสโรเตอร์เท่านั้น ช่วยให้คุณเปลี่ยนความเร็วได้อย่างราบรื่นในช่วงกว้าง (รูปที่ 2.24) ข้อเสียของมันคือการสูญเสียพลังงานจำนวนมากในความต้านทานเพิ่มเติม ลักษณะทางกล "อ่อน" มากเกินไปของเครื่องยนต์ที่มีความต้านทานสูงในวงจรโรเตอร์ ในบางกรณี สิ่งหลังไม่เป็นที่ยอมรับ เนื่องจากการเปลี่ยนแปลงเล็กน้อยในแรงบิดโหลดสอดคล้องกับการเปลี่ยนแปลงที่สำคัญของความเร็ว ในทางปฏิบัติ วิธีนี้ใช้เป็นหลักในการควบคุมความเร็วของมอเตอร์ขนาดเล็ก เช่น ในอุปกรณ์ยก 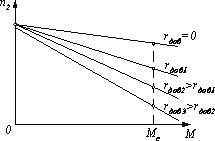
![]()
ด้วยวิธีการควบคุมความเร็วของเครื่องยนต์นี้ การปรับค่ารีโอสแตท (ความต้านทานแอกทีฟเพิ่มเติม) ที่รวมอยู่ในวงจรโรเตอร์จะต้องได้รับการออกแบบสำหรับการทำงานในระยะยาว ดังนั้นรีโอสแตตสตาร์ทซึ่งออกแบบมาสำหรับกระแสไฟระยะสั้นในช่วงระยะเวลาเริ่มต้นจึงไม่สามารถใช้เป็นตัวปรับค่าได้
การสตาร์ทโดยตรงเป็นวิธีที่พบได้บ่อยที่สุดในการสตาร์ทมอเตอร์เหนี่ยวนำแบบกรงกระรอก มอเตอร์เชื่อมต่อโดยตรงกับไฟหลักผ่านสตาร์ทเตอร์ ในกรณีนี้ มอเตอร์เหนี่ยวนำแบบกรงกระรอกจะพัฒนาแรงบิดในการสตาร์ทที่สูงด้วยเวลาเร่งความเร็วที่ค่อนข้างสั้น วิธีนี้มักใช้สำหรับมอเตอร์ไฟฟ้าขนาดเล็กถึงขนาดกลางที่มีความเร็วการทำงานเต็มที่ในเวลาอันสั้น
เริ่มต้นโดยตรง วิธีนี้ใช้เพื่อสตาร์ทมอเตอร์แบบอะซิงโครนัสด้วยโรเตอร์แบบกรงกระรอก มอเตอร์ของพลังงานต่ำและปานกลางประเภทนี้มักจะได้รับการออกแบบเพื่อให้เมื่อขดลวดสเตเตอร์เชื่อมต่อโดยตรงกับเครือข่าย กระแสเริ่มต้นที่เป็นผลลัพธ์จะไม่สร้างแรงไฟฟ้าพลศาสตร์มากเกินไปและการเพิ่มขึ้นของอุณหภูมิที่เป็นอันตรายจากมุมมองของกลไกและ ความแข็งแรงทางความร้อนขององค์ประกอบหลักของเครื่อง
ในมอเตอร์แบบอะซิงโครนัส อัตราส่วน L/R ค่อนข้างเล็ก (โดยเฉพาะอย่างยิ่งในมอเตอร์ขนาดเล็ก) ดังนั้นช่วงเวลาชั่วครู่ในขณะที่เปิดเครื่องจะมีลักษณะเฉพาะด้วยการลดทอนอย่างรวดเร็วของกระแสอิสระ ทำให้สามารถละเลยกระแสอิสระและคำนึงถึงเฉพาะค่าคงที่ของกระแสชั่วคราวเท่านั้น
มอเตอร์มักจะเริ่มต้นโดยใช้สวิตช์แม่เหล็กไฟฟ้า K - สตาร์ทแม่เหล็ก (รูปที่ 4.27, a) และเร่งความเร็วโดยอัตโนมัติตามลักษณะทางกลตามธรรมชาติ M (รูปที่ 4.27.6) จากจุด P ซึ่งสอดคล้องกับช่วงเวลาเริ่มต้นเริ่มต้นไปยังจุด P ซึ่งสอดคล้องกับเงื่อนไข M = Mst การเร่งความเร็วระหว่างการเร่งถูกกำหนดโดยความแตกต่างระหว่าง abscissas ของเส้นโค้ง M และ Mst และโมเมนต์ความเฉื่อยของโรเตอร์มอเตอร์และกลไกที่ตั้งค่าให้หมุน ถ้าในช่วงเวลาเริ่มต้นของการเปิดตัว Mp< Мст, двигатель разогнаться не сможет.
ค่าของแรงบิดเริ่มต้นเริ่มต้นได้จากสูตร (4.46a) สมมติว่า
Mn \u003d m1 U12R "2 / (w1 [(R1 + R" 2) 2 + (X1 + X "2) 2])
อัตราส่วนของโมเมนต์ Mp / Mnom = kp.m เรียกว่าหลายหลากของแรงบิดเริ่มต้นเริ่มต้น สำหรับเครื่องยนต์ที่มีโรเตอร์กรงกระรอกที่มีกำลัง 0.6-100 กิโลวัตต์ GOST จะตั้งค่า kp.m = 1.0÷2.0; กำลัง 100-1000 kW - kp.m = 0.7÷1.0
การได้รับอัตราส่วนแรงบิดเริ่มต้นที่มากกว่าที่ควบคุมโดย GOST มักจะไม่พึงปรารถนา เนื่องจากสิ่งนี้เกี่ยวข้องกับการเพิ่มความต้านทานเชิงรุกของโรเตอร์ (ดู 4.58) หรือการเปลี่ยนแปลงในการออกแบบของโรเตอร์ (ดู§ 4.11) ซึ่ง ทำให้สมรรถนะด้านพลังงานของเครื่องยนต์แย่ลง
ข้อเสียของวิธีการเริ่มต้นนี้ นอกเหนือจากแรงบิดเริ่มต้นที่ค่อนข้างเล็กแล้ว ยังเป็นกระแสไหลเข้าขนาดใหญ่ ห้าถึงเจ็ดเท่าของค่าปัจจุบันที่กำหนด
แม้จะมีข้อบกพร่องเหล่านี้ การสตาร์ทเครื่องยนต์โดยการเชื่อมต่อโดยตรงกับขดลวดสเตเตอร์กับเครือข่ายนั้นมีการใช้กันอย่างแพร่หลาย เนื่องจากความเรียบง่ายและคุณสมบัติทางเทคนิคและเศรษฐกิจที่ดีของมอเตอร์กรงกระรอก - ต้นทุนต่ำและประสิทธิภาพพลังงานสูง (η, cos φ1, km, เป็นต้น)
แรงดันไฟฟ้าต่ำเริ่มต้น การสตาร์ทดังกล่าวใช้สำหรับมอเตอร์แบบอะซิงโครนัสที่มีโรเตอร์กรงกระรอกกำลังสูง เช่นเดียวกับมอเตอร์กำลังปานกลางที่มีเครือข่ายไฟฟ้ากำลังแรงไม่เพียงพอ การลดแรงดันไฟฟ้าสามารถทำได้ด้วยวิธีต่อไปนี้:
ก) โดยการเปลี่ยนขดลวดสเตเตอร์ด้วยสวิตช์จากวงจรปกติ Δ เป็นวงจรเริ่มต้น Y ในกรณีนี้ แรงดันไฟฟ้าที่ใช้กับเฟสของขดลวดสเตเตอร์จะลดลง √3 ครั้ง ซึ่งจะทำให้กระแสเฟสลดลงโดย √3 ครั้งและกระแสเชิงเส้น 3 ครั้ง เมื่อสิ้นสุดกระบวนการสตาร์ทและเร่งเครื่องยนต์ให้ถึงความเร็วที่กำหนด ขดลวดสเตเตอร์จะเปลี่ยนกลับเป็นวงจรปกติ
b) รวมอยู่ในวงจรขดลวดสเตเตอร์สำหรับช่วงเริ่มต้นของความต้านทานที่ใช้งานเพิ่มเติม (ตัวต้านทาน) หรือปฏิกิริยา (เครื่องปฏิกรณ์) (รูปที่ 4.28, a) ในกรณีนี้แรงดันตกคร่อม ΔUเพิ่มจะถูกสร้างขึ้นบนความต้านทานที่ระบุ ซึ่งเป็นสัดส่วนกับกระแสเริ่มต้น ซึ่งเป็นผลมาจากแรงดันไฟฟ้าที่ลดลงถูกนำไปใช้กับขดลวดสเตเตอร์ ในขณะที่มอเตอร์เร่งความเร็ว EDSE2s ที่เหนี่ยวนำในการหมุนของโรเตอร์จะลดลง และด้วยเหตุนี้ กระแสเริ่มต้น เป็นผลให้แรงดันไฟฟ้าตก ΔUเพิ่มความต้านทานที่ระบุลดลงและแรงดันไฟฟ้าที่ใช้กับมอเตอร์เพิ่มขึ้นโดยอัตโนมัติ หลังจากสิ้นสุดการเร่งความเร็ว ตัวต้านทานเพิ่มเติมหรือเครื่องปฏิกรณ์จะลัดวงจรโดยคอนแทคเตอร์ K1
c) การเชื่อมต่อมอเตอร์กับเครือข่ายผ่าน ATP ตัวแปลงอัตโนมัติแบบสเต็ปดาวน์ (รูปที่ 4.28.6) ซึ่งสามารถสลับได้หลายขั้นตอนในระหว่างกระบวนการเริ่มต้นโดยอุปกรณ์ที่เหมาะสม
ข้อเสียของวิธีการเริ่มต้นเหล่านี้โดยการลดแรงดันไฟฟ้าคือการลดลงอย่างมากในการเริ่มต้นและแรงบิดสูงสุดของมอเตอร์ซึ่งเป็นสัดส่วนกับกำลังสองของแรงดันไฟฟ้าที่ใช้ ดังนั้นจึงสามารถใช้ได้เฉพาะเมื่อสตาร์ทมอเตอร์โดยไม่มีโหลด
ในรูป ตัวอย่างเช่น 4.29 แสดงคุณสมบัติทางกลของมอเตอร์ที่พิกัดและแรงดันไฟฟ้าที่ลดลง กล่าวคือ เมื่อขดลวดสเตเตอร์เชื่อมต่อตามแบบแผน Y และ Δ เช่นเดียวกับกราฟของการเปลี่ยนแปลงของกระแส I1 และแรงบิด M เมื่อเริ่มต้น เครื่องยนต์โดยการเปลี่ยนขดลวดสเตเตอร์จาก Y เป็น Δ เมื่อเชื่อมต่อตามรูปแบบ Y แรงบิดสูงสุดและเริ่มต้นจะลดลงสามเท่าอันเป็นผลมาจากการที่มอเตอร์ไม่สามารถสตาร์ทกลไกด้วยแรงบิดโหลด Mn
การสตาร์ทมอเตอร์แบบอะซิงโครนัส
ณ เวลาที่เปิดตัว n=0, นั่นคือ สลิป S=1. เพราะ กระแสในโรเตอร์และขดลวดสเตเตอร์ขึ้นอยู่กับสลิปและเพิ่มขึ้นตามการเพิ่มขึ้นของกระแสเริ่มต้นของมอเตอร์คือ 5 ÷ 8 เท่าของกระแสที่กำหนด
Istart=(5÷8)เข้า
ตามที่กล่าวไว้ก่อนหน้านี้ เนื่องจากความถี่สูงของ EMF ของโรเตอร์ มอเตอร์เหนี่ยวนำจึงมีแรงบิดเริ่มต้นที่จำกัด
Mstart=(0.8÷1.8)Mn.
ในการสตาร์ทเครื่องยนต์ จำเป็นต้องให้แรงบิดในการสตาร์ทที่พัฒนาขึ้นมาเกินกว่าแรงบิดโหลดบนเพลา ขึ้นอยู่กับกำลังของแหล่งพลังงานและสภาวะการสตาร์ท ใช้วิธีการเริ่มต้นที่แตกต่างกันซึ่งมีเป้าหมายดังต่อไปนี้: การลดกระแสสตาร์ทและเพิ่มแรงบิดเริ่มต้น
วิธีการต่อไปนี้ในการสตาร์ทมอเตอร์แบบอะซิงโครนัสมีความโดดเด่น: การเชื่อมต่อโดยตรงกับวงจร, เริ่มต้นที่แรงดันไฟฟ้าที่ลดลง, การสตาร์ทแบบรีโอสแตติก, การใช้มอเตอร์ที่มีคุณสมบัติการสตาร์ทที่ดีขึ้น
2.11.1. เชื่อมต่อโดยตรงกับเครือข่าย
นี่เป็นวิธีที่ง่ายและถูกที่สุดในการเริ่มต้น มอเตอร์มาพร้อมกับแรงดันไฟฟ้าที่กำหนดด้วยตนเองหรือโดยการควบคุมระยะไกล อนุญาตให้เชื่อมต่อโดยตรงกับเครือข่ายได้หากกำลังมอเตอร์ไม่เกิน 5% ของกำลังของหม้อแปลงไฟฟ้า หากเครือข่ายแสงสว่างนั้นใช้พลังงานจากเครือข่ายนั้นด้วย ข้อ จำกัด ด้านพลังงานอธิบายโดยกระแสไฟกระชากในขณะที่สตาร์ทซึ่งทำให้แรงดันไฟฟ้าลดลงที่ขั้วของขดลวดทุติยภูมิของหม้อแปลงไฟฟ้า หากเครือข่ายแสงสว่างไม่ได้มาจากหม้อแปลงไฟฟ้า การเชื่อมต่อโดยตรงกับเครือข่ายสามารถใช้กับมอเตอร์ที่มีกำลังไฟฟ้าไม่เกิน 25% ของกำลังของหม้อแปลงไฟฟ้า
2.11.2. สตาร์ทแรงดันไฟฟ้าลดลง
วิธีนี้ใช้เมื่อสตาร์ทมอเตอร์ทรงพลังซึ่งไม่สามารถเชื่อมต่อโดยตรงกับเครือข่ายได้ เพื่อลดแรงดันไฟฟ้าที่จ่ายให้กับขดลวดสเตเตอร์จะใช้โช้กและตัวเปลี่ยนรูปแบบอัตโนมัติแบบสเต็ปดาวน์ หลังจากสตาร์ทเครื่อง แรงดันไฟหลักจะถูกนำไปใช้กับขดลวดสเตเตอร์
แรงดันไฟฟ้าจะลดลงเพื่อลดกระแสเริ่มต้น แต่ในขณะเดียวกัน ดังรูปที่ 2.17 และ 2.17.b แรงบิดเริ่มต้นลดลง หากแรงดันไฟฟ้าเมื่อสตาร์ทเครื่องลดลงหนึ่งปัจจัย แรงบิดเริ่มต้นจะลดลง 3 เท่า ดังนั้น วิธีการเริ่มต้นนี้สามารถใช้ได้เฉพาะเมื่อไม่มีโหลดบนเพลาเท่านั้น กล่าวคือ ในโหมดว่าง
ถ้าตามข้อมูลหนังสือเดินทาง มอเตอร์ต้องเชื่อมต่อกับเครือข่ายตามรูปแบบสามเหลี่ยม จากนั้นเพื่อลดกระแสเริ่มต้นสำหรับเวลาเริ่มต้น ขดลวดสเตเตอร์จะเชื่อมต่อตามรูปแบบดาว
ข้อเสียเปรียบหลักของวิธีการเริ่มต้นนี้คือต้นทุนของอุปกรณ์เริ่มต้นที่สูงและความเป็นไปไม่ได้ที่จะเริ่มต้นด้วยภาระบนเพลา
ในระหว่างการทำงานของกลไกต่างๆ ที่ขับเคลื่อนด้วยมอเตอร์แบบอะซิงโครนัสตามข้อกำหนดทางเทคโนโลยี จำเป็นต้องควบคุมความเร็วของการหมุนของกลไกเหล่านี้ วิธีการควบคุมความถี่ (ความเร็ว) ของการหมุนของมอเตอร์แบบอะซิงโครนัสแสดงอัตราส่วน:
n=(1−S)n0=(1−S)60f/p
ตามนั้นสำหรับภาระที่กำหนดบนเพลา สามารถปรับความเร็วของโรเตอร์ได้:
เปลี่ยนสลิป;
เปลี่ยนจำนวนเสาคู่
การเปลี่ยนความถี่ของแหล่งจ่ายไฟ
2.12.1. เปลี่ยนสลิป
วิธีนี้ใช้ในการขับเคลื่อนกลไกที่ติดตั้งมอเตอร์แบบอะซิงโครนัสที่มีเฟสโรเตอร์ ตัวอย่างเช่นในการขับเคลื่อนของเครื่องจักรยกและขนส่ง มีการแนะนำตัวปรับค่ารีโอสแตทในวงจรโรเตอร์เฟส การเพิ่มความต้านทานเชิงรุกของโรเตอร์ไม่ส่งผลต่อขนาดของช่วงเวลาวิกฤต แต่เพิ่มการลื่นวิกฤต (รูปที่ 2.21)
ในรูป 2.21 แสดงคุณสมบัติทางกลของมอเตอร์แบบอะซิงโครนัสที่มีความต้านทานต่างกันของตัวปรับค่า Rp3> Rp2> 0, Rp1=0
จากรูปที่ 2.21 ด้วยวิธีนี้ คุณสามารถควบคุมความเร็วได้หลากหลาย ข้อเสียเปรียบหลักของวิธีนี้:
เนื่องจากการสูญเสียน้ำหนักที่มากเกินไปในการปรับรีโอสแตท ประสิทธิภาพจึงลดลง กล่าวคือ วิธีที่ไม่ประหยัด
ลักษณะทางกลของมอเตอร์แบบอะซิงโครนัสจะอ่อนลงเมื่อความต้านทานแบบแอคทีฟของโรเตอร์เพิ่มขึ้น กล่าวคือ ความเสถียรของเครื่องยนต์ลดลง
เป็นไปไม่ได้ที่จะปรับความเร็วอย่างราบรื่น
เนื่องจากข้อบกพร่องเหล่านี้ วิธีนี้จึงใช้สำหรับการลดความเร็วในการหมุนในระยะสั้น
การควบคุมความเร็วของมอเตอร์แบบอะซิงโครนัส
จากสูตรที่สามารถควบคุมความเร็วโรเตอร์ของมอเตอร์เหนี่ยวนำได้ดังนี้ โดยการเปลี่ยนความถี่ f1 ของแรงดันไฟ จำนวนของขั้วคู่ p และปริมาณสลิป s
การควบคุมความถี่ วิธีนี้ช่วยให้คุณเปลี่ยนความเร็วได้อย่างราบรื่นในช่วงกว้าง สำหรับการนำไปใช้งาน เครื่องยนต์จะต้องใช้พลังงานจากแหล่งที่แยกต่างหาก (รูปที่ 2.18)
ตัวแปลงความถี่แบบคงที่ของเซมิคอนดักเตอร์จึงถูกใช้อย่างแพร่หลายที่สุดในปัจจุบัน
ขึ้นอยู่กับข้อกำหนดสำหรับคุณสมบัติทางกลของมอเตอร์แบบอะซิงโครนัสระหว่างการควบคุมความถี่พร้อมกับการเปลี่ยนแปลงความถี่ f1 จำเป็นต้องเปลี่ยนแรงดันไฟฟ้า U1 ที่จ่ายให้กับขดลวดสเตเตอร์ตามกฎหมายบางประการ
แรงบิดสูงสุดของมอเตอร์อยู่ที่ประมาณ (โดยไม่คำนึงถึงความต้านทาน r1) ซึ่งกำหนดโดย (2.40)
![]() .
.
เมื่อพิจารณาว่า ,,, เราได้
หากเมื่อควบคุมความเร็วจำเป็นต้องมีความถี่ f1 แรงบิดสูงสุดยังคงไม่เปลี่ยนแปลง (ควบคุมด้วย) เราก็จะได้
ดังนั้นเพื่อควบคุม n2 จำเป็นต้องเปลี่ยนแรงดันไฟฟ้า U1 ที่จ่ายให้กับขดลวดสเตเตอร์ตามสัดส่วนของความถี่ ในกรณีนี้ ฟลักซ์แม่เหล็กหลักของเครื่องที่ค่าต่างๆ ของความถี่ f1 ยังคงไม่เปลี่ยนแปลง กล่าวคือ
![]() (2.56)
(2.56)
ลักษณะทางกลของมอเตอร์แบบอะซิงโครนัสระหว่างการควบคุมด้วย Mmax = const แสดงในรูปที่ 2.19
ข้อเสียของการควบคุมความถี่คือต้นทุนการติดตั้งคอนเวอร์เตอร์ที่ค่อนข้างสูง
ควบคุมความเร็วด้วยการเปลี่ยนจำนวนคู่ของเสาขดลวดสเตเตอร์ ในการดำเนินการตามข้อบังคับนี้ไม่ได้วางขดลวดสองอันบนสเตเตอร์ในร่องทั่วไปโดยมี
สำหรับพิทช์ที่แตกต่างกันและจำนวนของเสาคู่ที่แตกต่างกัน ขึ้นอยู่กับความเร็วที่ต้องการ ขดลวดหนึ่งหรือหลายอันเชื่อมต่อกับเครือข่าย วิธีนี้ใช้ค่อนข้างน้อยเนื่องจากมีข้อเสียเปรียบอย่างมาก - การใช้ลวดพันเล็กน้อย (ขดลวดเดียวเท่านั้นที่ทำงานอยู่)
บ่อยครั้งที่การเปลี่ยนแปลงจำนวนขั้วคู่ทำได้โดยการเปลี่ยน (สลับ) ไดอะแกรมการเชื่อมต่อของขดลวดสเตเตอร์ หลักการของการเปลี่ยนดังกล่าวแสดงในรูปที่ 2.20
เมื่อเปลี่ยนจากการเชื่อมต่อแบบอนุกรมของขดลวดสองขดลวดไปเป็นขดลวดคู่ขนาน จำนวนขั้วคู่จะเปลี่ยนจาก 2 เป็น 1 หากมีเฟสที่คดเคี้ยวบนโรเตอร์ จะต้องสลับพร้อมกันกับขดลวดสเตเตอร์ด้วย ซึ่งก็คือ ข้อเสียใหญ่ ดังนั้นวิธีการควบคุมความเร็วนี้จึงใช้สำหรับมอเตอร์ที่มีโรเตอร์แบบกรงกระรอกเท่านั้น
มอเตอร์แบบอะซิงโครนัสที่มีการสลับจำนวนขั้วคู่เรียกว่าความเร็วหลายระดับ มีให้เลือกในความเร็วสอง สาม และสี่ เป็นที่ทราบกันดีว่ามีวงจรจำนวนมากที่สามารถสลับจำนวนคู่ขั้วได้ โครงร่างเหล่านี้แบ่งออกเป็นแผนการควบคุมแรงบิดคงที่และแผนการควบคุมกำลังคงที่ ลักษณะทางกลของมอเตอร์สองความเร็วแสดงอยู่ใน รูปที่ 2.21
รูปที่ 2.20 - การเปลี่ยนจำนวนคู่ขั้วโดยสลับขดลวดที่คดเคี้ยว:
a – เสาสองคู่; b - เสาหนึ่งคู่
รูปที่ 2.21 - ลักษณะทางกลของมอเตอร์สองความเร็ว
ด้วยการสลับจำนวนขั้วคู่ในอัตราส่วน 2:1
ที่แรงบิดคงที่ (a) และกำลังคงที่ (b)
ในทุกวิธีในการควบคุมความเร็วของมอเตอร์แบบอะซิงโครนัส วิธีการเปลี่ยนจำนวนขั้วคู่เป็นวิธีที่ประหยัดที่สุด แม้ว่าจะมีข้อเสียเช่นกัน:
- เครื่องยนต์มีขนาดและน้ำหนักค่อนข้างมากเมื่อเทียบกับเครื่องยนต์แบบปกติ
- การควบคุมความเร็วขั้นตอน
มอเตอร์หลายความเร็วใช้เพื่อขับเคลื่อนเครื่องมือกลและกลไกต่างๆ ซึ่งจะต้องควบคุมความเร็วในการหมุนในช่วงกว้าง (เช่น มอเตอร์แบบอะซิงโครนัสของลิฟต์)
ควบคุมความเร็วด้วยการเปลี่ยนแรงดันไฟ ระเบียบที่ระบุไว้สามารถทำได้โดยใช้ตัวควบคุมแรงดันไฟฟ้าไทริสเตอร์ PH (รูปที่ 2.22)
เนื่องจากแรงบิดของมอเตอร์เหนี่ยวนำเป็นสัดส่วน ลักษณะทางกลของแรงดันไฟฟ้าที่น้อยกว่าแรงดันไฟฟ้าที่กำหนดจะต่ำกว่าค่าปกติ (รูปที่ 2.23)
หากโมเมนต์ความต้านทาน MC คงที่ ดังรูป 2.23 เมื่อแรงดันตก สลิปของมอเตอร์
เพิ่มขึ้น
ในกรณีนี้ ความเร็วของโรเตอร์จะลดลง
การควบคุมสลิปด้วยวิธีนี้เป็นไปได้ภายใน
0 < s < sкр.
แรงดันไฟฟ้าที่ลดลงอีก (ต่ำกว่า U1(2)) ไม่เป็นที่ยอมรับ เนื่องจากในกรณีนี้ Mmax< MС и двигательостановится.
การควบคุมความเร็วของมอเตอร์โดยการเปลี่ยนแรงดันไฟฟ้าขาเข้า U1 มีข้อเสียเปรียบที่สำคัญ: ในกรณีนี้การสูญเสียเพิ่มขึ้นและดังนั้นประสิทธิภาพของมอเตอร์จึงลดลง เมื่อแรงดันไฟฟ้าลดลงตามสัดส่วนของ U1 ฟลักซ์แม่เหล็กหลักของเครื่องจะลดลงซึ่งเป็นผลมาจากการที่ M = MС = const กระแสในขดลวดของโรเตอร์จะเพิ่มขึ้นและทำให้สูญเสียทางไฟฟ้าในโรเตอร์ การสูญเสียแม่เหล็กในเหล็กสเตเตอร์จะลดลง โดยปกติเมื่อโหลดของมอเตอร์ใกล้เคียงกับค่าที่กำหนด การลดลงของ U1 จะทำให้การสูญเสียทั้งหมดเพิ่มขึ้นและความร้อนของมอเตอร์เพิ่มขึ้น ดังนั้นวิธีการควบคุมความเร็วที่พิจารณาจึงใช้สำหรับเครื่องจักรที่มีกำลังน้อยเป็นหลัก
การควบคุมความเร็วของมอเตอร์แบบอะซิงโครนัสโดยรวมความต้านทานแบบแอคทีฟเพิ่มเติมในวงจรโรเตอร์ วิธีการควบคุมนี้ใช้เฉพาะในมอเตอร์ที่มีเฟสโรเตอร์เท่านั้น ช่วยให้คุณเปลี่ยนความเร็วได้อย่างราบรื่นในช่วงกว้าง (รูปที่ 2.24) ข้อเสียของมันคือการสูญเสียพลังงานจำนวนมากในความต้านทานเพิ่มเติม ลักษณะทางกล "อ่อน" มากเกินไปของเครื่องยนต์ที่มีความต้านทานสูงในวงจรโรเตอร์ ในบางกรณี สิ่งหลังไม่เป็นที่ยอมรับ เนื่องจากการเปลี่ยนแปลงเล็กน้อยในแรงบิดโหลดสอดคล้องกับการเปลี่ยนแปลงที่สำคัญของความเร็ว ในทางปฏิบัติ วิธีนี้ใช้เป็นหลักในการควบคุมความเร็วของมอเตอร์ขนาดเล็ก เช่น ในอุปกรณ์ยก ![]()
ด้วยวิธีการควบคุมความเร็วของเครื่องยนต์นี้ การปรับค่ารีโอสแตท (ความต้านทานแอกทีฟเพิ่มเติม) ที่รวมอยู่ในวงจรโรเตอร์จะต้องได้รับการออกแบบสำหรับการทำงานในระยะยาว ดังนั้นรีโอสแตตสตาร์ทซึ่งออกแบบมาสำหรับกระแสไฟระยะสั้นในช่วงระยะเวลาเริ่มต้นจึงไม่สามารถใช้เป็นตัวปรับค่าได้
จากหลักสูตรวิศวกรรมไฟฟ้าเป็นที่ทราบกันดีว่าเมื่อสตาร์ทมอเตอร์ไฟฟ้าแบบอะซิงโครนัสจะใช้กระแสเริ่มต้นที่สำคัญจากเครือข่ายอุปทาน อันที่จริงในขณะที่เปิดตัวสลิป มอเตอร์แบบอะซิงโครนัส ส=1 ในโหมดระบุ ไม่เกิน 0.05 ซึ่งหมายความว่าในขณะที่เริ่มต้น สนามแม่เหล็กหมุนของสเตเตอร์จะข้ามขดลวดของโรเตอร์บ่อยกว่า 20 เท่า
อย่างไรก็ตาม กระแสเริ่มต้นในขดลวดสเตเตอร์และโรเตอร์มักจะไม่เกิน จัดอันดับปัจจุบันมากกว่า 7-8 ครั้งเนื่องจากในขณะที่เริ่มความต้านทานอุปนัยของวงจรโรเตอร์เพิ่มขึ้นอย่างรวดเร็วเนื่องจากความถี่ปัจจุบันเพิ่มขึ้น เป็นที่ทราบกันดีอยู่แล้วว่าค่ารีแอกแตนซ์อุปนัยของวงจรใด ๆ สามารถกำหนดได้โดยนิพจน์ต่อไปนี้:
ที่ไหน หลี่- การเหนี่ยวนำวงจร
ในขณะที่เริ่มต้น ความถี่ปัจจุบันในขดลวดโรเตอร์ภายใต้เงื่อนไขข้างต้น ( ส เริ่ม = 1; ส ชื่อ = 0.05) สูงกว่าในโหมดระบุ 20 เท่า ดังนั้น ความต้านทานรวมของวงจรโรเตอร์ Z = ?R 2 + x หลี่ 2 เมื่อเริ่มต้นขึ้นจะสูงกว่ามากเมื่อเทียบกับโหมดเล็กน้อย สิ่งนี้อธิบายความจริงที่ว่ากระแส ณ เวลาที่เริ่มต้นนั้นไม่ใช่ 20 เท่าของค่าเล็กน้อย แต่เพียง 7-8 เท่า
สำหรับตัวมอเตอร์ไฟฟ้าเอง กระแสเริ่มต้นที่เพิ่มขึ้นนั้นไม่ก่อให้เกิดอันตรายอย่างใหญ่หลวง เนื่องจากกระแสไฟเหล่านี้ไหลในช่วงเวลาที่ค่อนข้างสั้นและไม่มีเวลาที่จะทำให้ขดลวดร้อนเกินไป อย่างไรก็ตาม กระแสเริ่มต้นที่เพิ่มขึ้นนำไปสู่แรงดันไฟฟ้าตกขนาดใหญ่ในเครือข่ายอุปทาน ซึ่งส่งผลเสียต่อการทำงานของผู้บริโภครายอื่น สิ่งนี้บังคับให้ใช้มาตรการพิเศษจำนวนหนึ่งที่จำกัดกระแสเริ่มต้นของมอเตอร์แบบอะซิงโครนัส
ควรระลึกไว้เสมอว่ามอเตอร์ไฟฟ้าแบบอะซิงโครนัสซึ่งมีกระแสเริ่มต้นขนาดใหญ่มีค่าค่อนข้างน้อย แรงบิดเริ่มต้นเนื่องจากในขณะที่เริ่มต้นตัวประกอบกำลังของชิปโรตารี่และต่ำมาก แรงบิดที่พัฒนาขึ้นโดยมอเตอร์ไฟฟ้าแบบอะซิงโครนัสตามนิพจน์ (96) ไม่เพียงเป็นสัดส่วนกับกระแสของโรเตอร์เท่านั้น แต่ยังรวมถึงตัวประกอบกำลังของวงจรโรเตอร์ด้วย
ดังนั้นวงจรเริ่มต้นเทียมสำหรับมอเตอร์ไฟฟ้าแบบอะซิงโครนัสที่กล่าวถึงด้านล่างมักมีเป้าหมายไม่เพียง แต่ลดกระแสเริ่มต้น แต่ยังเพิ่มแรงบิดเริ่มต้นอีกด้วย
สตาร์ทมอเตอร์ด้วยเฟสโรเตอร์ . มอเตอร์ไฟฟ้าแบบอะซิงโครนัสที่มีเฟสโรเตอร์ เช่น โรเตอร์ที่มีแหวนสลิป ถูกเปิดตัวในระบบปฏิบัติการด้วยความช่วยเหลือของลิโน่สตาร์ทที่รวมอยู่ในวงจรโรเตอร์ (ดูรูป 40, เอ ). การแนะนำของลิโน่ลดกระแสเริ่มต้นและช่วยให้คุณได้รับแรงบิดเริ่มต้นที่ต้องการสูงถึง เอ็ม เกาะครีต . นิพจน์ (93)แสดงว่าจำนวนสลิป ส เกาะครีต ซึ่งแรงบิดสูงสุดเกิดขึ้นนั้นขึ้นอยู่กับความต้านทานเชิงแอคทีฟของเฟสโรเตอร์ ดังนั้นโดยการเลือกค่าที่เหมาะสมของแนวต้านนี้ เป็นไปได้ที่จะได้โมเมนต์ที่ใกล้เคียงกับขนาด เอ็ม เกาะครีต (ดูรูปที่ 43 และ 44)
สะดวกในการคำนวณรีโอสแตตเริ่มต้นโดยใช้วิธีการวิเคราะห์แบบกราฟซึ่งมีความเหมือนกันมากกับวิธีการที่พิจารณาก่อนหน้านี้สำหรับมอเตอร์กระแสตรง
ในการคำนวณลิโน่สตาร์ทจำเป็นต้องทราบข้อมูลเล็กน้อยของมอเตอร์ไฟฟ้าและมีความเป็นธรรมชาติ ลักษณะทางกล พี = ฉ(เอ็ม): ส่วนหลังสามารถสร้างขึ้นได้อย่างง่ายดาย อย่างที่คุณทราบ โดยสองจุด - โดยความเร็วซิงโครนัสที่แรงบิดเป็นศูนย์และความเร็วที่กำหนดที่พิกัด (แรงบิด การมีข้อมูลเหล่านี้ คุณสามารถคำนวณลิโน่สตาร์ทโดยใช้วิธีการต่อไปนี้
1. เลือกขีดจำกัดของการเปลี่ยนแปลงแรงบิดเมื่อสตาร์ทเครื่อง เอ็ม ม โอ้ และ เอ็ม นาที และถูกวาดบนไดอะแกรมเริ่มต้น (รูปที่ 47) เมื่อเลือกโมเมนต์ ควรชี้นำโดยข้อเท็จจริงที่ว่าแรงบิดเริ่มต้นสูงสุดควรน้อยกว่าโมเมนต์พลิกคว่ำเล็กน้อย และแรงบิดขั้นต่ำควรสูงกว่าโมเมนต์ความต้านทานคงที่เล็กน้อย เอ็ม กับ และความแตกต่างที่เลือกยิ่งน้อย ( เอ็ม ม โอ้ -เอ็ม นาที ) ยิ่งรีโอสแตทสตาร์ทมีขั้นตอนมากเท่าไหร่ มอเตอร์ก็จะยิ่งสตาร์ทได้นุ่มนวลและเร็วขึ้น
2. การสตาร์ทมอเตอร์ไฟฟ้าต้องเริ่มจากจุด 1 เนื่องจากเมื่อสตาร์ทมอเตอร์ไฟฟ้าตามเงื่อนไขข้างต้นต้องพัฒนาสักครู่ เอ็ม ม โอ้ ที่ น= 0. ดังนั้น คุณลักษณะเริ่มต้นแรก เอสอดคล้องกับลิโน่เริ่มต้นที่เปิดใช้งานอย่างเต็มที่จะต้องผ่านจุด พี 0 และ 1 . ความเร็วของมอเตอร์จะเพิ่มขึ้นเป็น เอ็ม ม โอ้ > เอ็ม ค กล่าวคือ มีโมเมนต์ส่วนเกินที่เร่งความเร็วให้กับกลไก เมื่อความเร็วเพิ่มขึ้น แรงบิดจะลดลง และเมื่อถึงค่า เอ็ม นาที (จุด2 ) ขั้นตอนแรกของลิโน่สตาร์ทจะต้องปิด
3. เมื่อปิดสเตจแรก มอเตอร์ไฟฟ้าจะสลับการทำงานจากลักษณะเฉพาะ เอสำหรับลักษณะ ขสอดคล้องกับลิโน่เริ่มต้นที่รวมไว้โดยไม่มีสเตจแรก ในระหว่างการปิดสเตจแรกความเร็วของมอเตอร์ไฟฟ้าแทบจะไม่มีเวลาเปลี่ยนแปลง ดังนั้นเราจึงสามารถสันนิษฐานได้ว่าการเปลี่ยนแปลงจากลักษณะหนึ่งไปอีกลักษณะหนึ่งเกิดขึ้นตามแนวเส้นตรงแนวนอน 2 -3 และลักษณะ ขผ่านจุด พี 0 และ 3.
4. การเร่งความเร็วของมอเตอร์ไฟฟ้าเกิดขึ้นแล้วตามลักษณะ ขจนกระทั่งแรงบิดลดลงอีกครั้งเป็นค่า เอ็ม นาที . ในกรณีนี้ควรปิดรีโอสแตทสเตจที่สองและมอเตอร์ไฟฟ้าจะสลับทำงานตามลักษณะ กับ. การเปลี่ยนแปลงอยู่ในเส้นแนวนอน 4 -5 และคุณลักษณะ c ผ่านจุด น 0 และ 5 .
5. เมื่อเมื่อทำงานกับลักษณะเฉพาะ ชั่วขณะหนึ่งอีกครั้งจะลดลงเป็นค่า เอ็ม นาที , ขั้นตอนสุดท้ายที่สามของลิโน่สตาร์ทจะถูกปิดและมอเตอร์ไฟฟ้าจะสลับทำงานตามลักษณะธรรมชาติ d. ในลักษณะนี้ การเร่งความเร็วของมอเตอร์ไฟฟ้าจะดำเนินต่อไปจนกว่าแรงบิดจะเท่ากับโมเมนต์ของความต้านทานสถิต หลังจากนั้นการเร่งความเร็วจะหยุดและมอเตอร์จะทำงานด้วยความเร็วคงที่
ควรสังเกตว่าในกรณีที่พิจารณา จำนวนขั้นตอนของลิโน่เริ่มต้นจะถูกเลือกไว้ล่วงหน้า ดังนั้นช่วงเวลา เอ็ม ม โอ้ และ เอ็ม นาที ต้องเลือกเพื่อให้เมื่อปิดขั้นตอนที่สามมอเตอร์ไฟฟ้าจะเปลี่ยนเป็นลักษณะธรรมชาติ d. หากสิ่งนี้ไม่เกิดขึ้นจำเป็นต้องเปลี่ยนค่าของช่วงเวลาเล็กน้อย เอ็ม max และ เอ็ม นาที และทำซ้ำการสร้าง ในกรณีที่ไม่จำกัดจำนวนขั้น ให้ดำเนินการก่อสร้างจนกว่าจะมีการเปลี่ยนแปลงลักษณะทางธรรมชาติ จำนวนขั้นตอนของลิโน่ถูกกำหนดในกรณีนี้โดยไดอะแกรมเริ่มต้น
6. การใช้ไดอะแกรมเริ่มต้น (ดูรูปที่ 47) เป็นการง่ายที่จะกำหนดความต้านทานของลิโน่ทั้งหมดและแต่ละขั้นตอน มันง่ายที่จะพิสูจน์ว่าเซ็กเมนต์ 7 -9 หมายถึง ในระดับความต้านทาน ความต้านทานเชิงแอคทีฟของเฟสของขดลวดโรเตอร์ และเซ็กเมนต์ 1 - 7 ในระดับเดียวกัน - ความต้านทานรวมของเฟสของลิโน่สตาร์ท กลุ่ม 1 -3 , 3 -5 และ 5 -7 แทนค่าความต้านทานเชิงรุกของด่านแรก สอง และสามของลิโน่เริ่มต้นตามลำดับ
ระดับความต้านทานสามารถกำหนดได้โดยนิพจน์
ที่ไหน 7 -9 - ส่วนบนไดอะแกรมในหน่วยความยาว
R 2 - ค่าความต้านทานแอกทีฟของเฟสเดียวของโรเตอร์ ซึ่งสามารถนำมาจากข้อมูลแผ่นป้ายของมอเตอร์ไฟฟ้า หรือกำหนดโดยการวัดหรือคำนวณโดยประมาณโดยใช้สูตร
ที่ไหน ส- ใบระบุ;
t 2 - จำนวนเฟสโรเตอร์
ฉัน 2 - จัดอันดับปัจจุบันในเฟสโรเตอร์
เอ็ม- แรงบิดสูงสุด
วิธีการที่พิจารณาแล้วในการเปิดตัวมอเตอร์ไฟฟ้าแบบอะซิงโครนัสด้วยเฟสโรเตอร์นั้นง่ายและเชื่อถือได้ ช่วยให้คุณสามารถลดกระแสเริ่มต้นและเพิ่มแรงบิดเริ่มต้นขึ้นจนถึงแรงบิดพลิกคว่ำได้หากจำเป็น ข้อเสียของวิธีนี้ควรได้รับการพิจารณาถึงการสูญเสียพลังงานที่สำคัญในรีโอสแตตเริ่มต้นรวมถึงขนาดใหญ่ของหลังที่มีขั้นตอนจำนวนมาก เพื่อหลีกเลี่ยงการใช้รีโอสแตตสตาร์ทที่เทอะทะเกินไป รีโอสแตทที่มีวงจรอสมมาตรที่เรียกว่าวงจรมักจะใช้ในวงจรเครน เมื่อความต้านทานไม่ได้ส่งออกพร้อมกันจากสามเฟสของวงจรโรเตอร์ แต่จะค่อยๆ
ในช่วงเริ่มต้นของการเริ่มต้น ความต้านทานทั้งหมดจะเข้าสู่วงจรโรเตอร์ของมอเตอร์ไฟฟ้า จากนั้นค่อย ๆ เมื่อมอเตอร์ไฟฟ้าเร่งความเร็วด้วยความช่วยเหลือของดรัมหรือตัวควบคุมลูกเบี้ยวระยะแรกของความต้านทานจะถูกลบออกจากวงจรของเฟสแรกจากนั้นครั้งที่สองจากนั้นที่สาม ที่ตำแหน่งถัดไปของตัวควบคุม ความต้านทานขั้นที่สองจะถูกลบออกจากวงจรของเฟสแรก และต่อๆ ไปจนกระทั่งที่ตำแหน่งสุดท้ายของตัวควบคุม ความต้านทานทั้งหมดจะถูกลบออกและวงจรโรเตอร์จะลัดวงจร
วิธีการเริ่มต้นนี้ทำให้เกิดความไม่สมดุลของกระแสของวงจรโรเตอร์ซึ่งไม่เป็นอันตรายต่อมอเตอร์ไฟฟ้าและในขณะเดียวกันก็ช่วยให้คุณลดขนาดของลิโน่สตาร์ทและคอนโทรลเลอร์ได้
การสตาร์ทมอเตอร์ไฟฟ้าด้วยโรเตอร์กรงกระรอก
การสตาร์ทมอเตอร์ไฟฟ้าแบบอะซิงโครนัสอันทรงพลังด้วยโรเตอร์กรงกระรอกนั้นสัมพันธ์กับปัญหาหลายประการ เนื่องจากการจำกัดกระแสเริ่มต้นโดยการเพิ่มความต้านทานเข้ามา ในกรณีนี้ไม่สามารถใช้โซ่โรเตอร์ได้ ตามกฎแล้ว มอเตอร์ไฟฟ้าที่มีโรเตอร์แบบกรงกระรอกที่มีกำลังค่อนข้างน้อยถูกใช้ในเครื่องยกและขนย้าย ซึ่งโดยปกติไม่จำเป็นต้องจำกัดกระแสเริ่มต้น
เมื่อมอเตอร์ไฟฟ้าแบบอะซิงโครนัสที่มีโรเตอร์แบบกรงกระรอกได้รับพลังงานจากแหล่งจ่ายไฟหลัก ในกรณีส่วนใหญ่ การสตาร์ทจะทำโดยการเชื่อมต่อขดลวดสเตเตอร์กับแรงดันไฟสูงสุดของแหล่งจ่ายไฟหลัก ดังแสดงในรูปที่ 48, เอ.
หากกำลังของมอเตอร์ไฟฟ้าเทียบเท่ากับกำลังของเครือข่าย กระแสไฟเริ่มต้นจะทำให้แรงดันไฟฟ้าตกมากอย่างไม่สามารถยอมรับได้ ซึ่งจะทำให้สภาพการทำงานของผู้บริโภครายอื่นที่ขับเคลื่อนโดยเครือข่ายเดียวกันแย่ลง ในกรณีนี้จำเป็นต้องใช้มาตรการเพื่อจำกัดกระแสเริ่มต้น
เมื่อเริ่มต้นด้วยการเปลี่ยนโดยตรงเป็นแรงดันไฟฟ้าเต็ม ขดลวดสเตเตอร์จะเชื่อมต่อกับเครือข่ายโดยเพียงแค่เปิดอุปกรณ์ที่เหมาะสม - สวิตช์มีด คอนแทคเตอร์ สตาร์ทแม่เหล็ก ฯลฯ ในกรณีนี้มีกระแสไฟกระชากเริ่มต้นซึ่ง สูงกว่ากระแสไฟของมอเตอร์ไฟฟ้า 7-8 เท่า ต้องระลึกไว้เสมอว่ากระแสไฟกระชากในขณะที่สตาร์ทไม่ได้ขึ้นอยู่กับโหลด แต่ขึ้นอยู่กับค่าความต้านทานของขดลวดมอเตอร์และแรงดันไฟหลัก ในเรื่องนี้หากจำเป็นต้องลดกระแสเริ่มต้น แรงดันไฟฟ้าที่ลดลงจะถูกส่งไปยังมอเตอร์ไฟฟ้าในเวลาที่สตาร์ท
การลดแรงดันไฟฟ้าที่จ่ายให้กับขดลวดสเตเตอร์สามารถทำได้:
ก) เปลี่ยนสเตเตอร์ที่คดเคี้ยวจากดาวเป็นรูปสามเหลี่ยม
b) ด้วยความช่วยเหลือของความต้านทานแบบแอคทีฟที่รวมอยู่ในวงจรสเตเตอร์
c) การใช้เครื่องแปลงอัตโนมัติ
วิธีทั่วไปของวิธีการทั้งหมดนี้คือการลดกระแสเริ่มต้นของมอเตอร์ในขณะที่ลดแรงบิดเริ่มต้น ซึ่งอย่างที่ทราบกันดีอยู่แล้วว่าเป็นสัดส่วนกับกำลังสองของแรงดันไฟ ซึ่งหมายความว่าวิธีการเริ่มต้นที่พิจารณาจะใช้ได้เฉพาะในช่วงเวลาความต้านทานเพียงเล็กน้อยเท่านั้น
เริ่มต้นด้วยการเปลี่ยนขดลวดสเตเตอร์จากสตาร์เป็นเดลต้า ส่วนใหญ่มักใช้สำหรับมอเตอร์ไฟฟ้าแบบอะซิงโครนัสที่มีโรเตอร์กรงกระรอก ซึ่งในระหว่างการทำงานปกติ ขดลวดสเตเตอร์จะเชื่อมต่อในเดลต้า หลักการทำงานของวงจร (รูปที่ 48, ข) ประกอบด้วยความจริงที่ว่าในช่วงเริ่มต้นของการเริ่มต้นการพันของสเตเตอร์จะถูกเปิดโดยดาวและเชื่อมต่อกับเครือข่าย เมื่อมอเตอร์ไฟฟ้ามีความเร็วที่กำหนด ขดลวดจะเปลี่ยนเป็นรูปสามเหลี่ยม เห็นได้ชัดว่าค่าของกระแสเริ่มต้นเมื่อเชื่อมต่อกับดาวคือ ? น้อยกว่าเมื่อเชื่อมต่อกับสามเหลี่ยมเนื่องจากแรงดันไฟฟ้าที่จ่ายให้กับแต่ละเฟสของมอเตอร์ไฟฟ้าคือ ? น้อยกว่า 3 เท่าในกรณีแรกเมื่อเทียบกับ กรณีที่สอง จริงอยู่ แรงบิดเริ่มต้นจะน้อยกว่าสามเท่า ดังแสดงในรูป 48, ขไม่จำเป็นต้องใช้อุปกรณ์ที่ซับซ้อนในการสตาร์ทมอเตอร์ด้วยวิธีนี้ การสตาร์ทมอเตอร์ไฟฟ้าทำได้โดยสวิตช์สามขั้วทั่วไป R.
ค่อนข้างน้อยวิธีการเริ่มต้นที่ไม่ประหยัดจะใช้ด้วยความช่วยเหลือของความต้านทานแบบแอคทีฟที่รวมอยู่ในวงจรสเตเตอร์ที่คดเคี้ยว วิธีการเริ่มต้นนี้ใช้เฉพาะในกรณีที่ต้องเปิดขดลวดสเตเตอร์ของมอเตอร์ไฟฟ้าระหว่างการทำงานปกติโดยดาว เมื่อเปิดเครื่อง สวิตช์จะปิดก่อน R 1 (รูปที่ 48, ใน). ในกรณีนี้ ขดลวดสเตเตอร์จะเชื่อมต่อกับเครือข่ายผ่านรีโอสแตต R. เมื่อมอเตอร์ไฟฟ้าพัฒนาเป็นจำนวนรอบ สวิตช์มีดจะปิดลง R 2 และลิโน่จะถูกแบ่ง
แทบจะไม่มีการสตาร์ทมอเตอร์ไฟฟ้าแบบอะซิงโครนัสโดยใช้เครื่องเปลี่ยนรูปแบบอัตโนมัติ ในกรณีนี้ ในช่วงแรกของการเริ่มต้น สวิตช์หกขั้ว พี(รูปที่ 48, G) อยู่ในตำแหน่ง 1 และไปยังขั้วสเตเตอร์ผ่านตัวแปลงอัตโนมัติ ตู่แรงดันไฟฟ้าต่ำถูกนำไปใช้ เมื่อมอเตอร์ไฟฟ้าเร่งความเร็ว สวิตช์จะอยู่ที่ตำแหน่ง 2 และสเตเตอร์อยู่ภายใต้แรงดันไฟหลักเต็ม
ข้อเสียทั่วไปของวิธีการที่พิจารณาทั้งหมดในการสตาร์ทมอเตอร์ไฟฟ้าแบบอะซิงโครนัสด้วยโรเตอร์กรงกระรอกจาก สวนท่งคือแรงบิดในการสตาร์ทที่ลดลงอย่างมาก
ในการจำกัดกระแสเริ่มต้นโดยไม่ลดแรงบิดเริ่มต้นพร้อมกัน จำเป็นต้องเพิ่มความต้านทานของขดลวดของโรเตอร์ในระหว่างการสตาร์ท ในการทำเช่นนี้ไม่ได้วางขดลวดลัดวงจรสองอัน (มอเตอร์ไฟฟ้าสองเซลล์) บนโรเตอร์หรือทำโรเตอร์ที่มีร่องลึกที่เรียกว่า
มอเตอร์เหนี่ยวนำสองเซลล์และมอเตอร์แบบร่องลึกมีแรงบิดเริ่มต้นขนาดใหญ่และอัตราส่วนกระแสเริ่มต้นต่ำกว่า มอเตอร์กรงกระรอกอย่างไรก็ตาม การดำเนินการตามแบบแผนนั้น ค่าใช้จ่ายของการดำเนินการแบบเดิมนั้นสูงกว่ามากและมีการใช้งานค่อนข้างน้อย