กระแสที่จำเป็นสำหรับสตาร์ทมอเตอร์เรียกว่ากระแสเริ่มต้น ตามกฎแล้วกระแสเริ่มต้นของมอเตอร์ไฟฟ้านั้นมากกว่ากระแสที่จำเป็นสำหรับการทำงานที่คงที่ตามปกติหลายเท่า
รูปที่ 1. มอเตอร์แบบอะซิงโครนัสกระแสเริ่มต้นขนาดใหญ่ของมอเตอร์เหนี่ยวนำเป็นสิ่งจำเป็นในการหมุนโรเตอร์จากการหยุดนิ่ง ซึ่งต้องใช้พลังงานมากกว่าที่จะรักษาจำนวนรอบคงที่ต่อไป ควรสังเกตว่าแม้จะมีหลักการทำงานแตกต่างไปจากเดิมอย่างสิ้นเชิง มอเตอร์เฟสเดียว กระแสตรงมีลักษณะเฉพาะด้วยกระแสเริ่มต้นที่สูง
กระแสเริ่มต้นสูงสำหรับมอเตอร์เป็นสิ่งที่ไม่พึงปรารถนา เนื่องจากอาจทำให้เกิดการขาดแคลนพลังงานในระยะสั้นสำหรับอุปกรณ์อื่นๆ ที่เชื่อมต่อกับกริด (แรงดันไฟตก) ดังนั้นเมื่อทำการเชื่อมต่อและปรับแต่งเครื่องยนต์ กระแสสลับ(ที่พบมากที่สุดในอุตสาหกรรม) ภารกิจคือการลดค่ากระแสเริ่มต้นให้น้อยที่สุดตลอดจนเพิ่มความนุ่มนวลในการสตาร์ทเครื่องยนต์ด้วยการใช้อุปกรณ์พิเศษเพิ่มเติม มาตรการดังกล่าวยังช่วยลดระดับค่าใช้จ่ายในการสตาร์ทมอเตอร์ไฟฟ้า (ใช้สายไฟที่มีหน้าตัดที่เล็กกว่า เหล็กกันโคลง และโรงไฟฟ้าดีเซลที่มีกำลังไฟต่ำกว่า เป็นต้น)
หนึ่งในที่สุด หมวดหมู่ที่มีประสิทธิภาพอุปกรณ์ที่อำนวยความสะดวกในสภาวะการสตาร์ทยากคือซอฟต์สตาร์ทและตัวแปลงความถี่ มีค่าอย่างยิ่งคือคุณสมบัติของพวกเขาในการรักษากระแสเริ่มต้นของมอเตอร์กระแสสลับเป็นเวลานาน - มากกว่าหนึ่งนาที นอกจากนี้ กระแสเริ่มต้นของมอเตอร์ไฟฟ้าแบบอะซิงโครนัสสามารถลดลงได้โดยการใส่ความต้านทานภายนอกเข้าไปในขดลวดของโรเตอร์
การคำนวณกระแสเริ่มต้นของมอเตอร์ไฟฟ้าแบบอะซิงโครนัส
อาจจำเป็นต้องคำนวณกระแสเริ่มต้นของมอเตอร์เพื่อเลือกความเหมาะสม เบรกเกอร์วงจร, สามารถปกป้องสายสวิตชิ่งของมอเตอร์ไฟฟ้านี้ ตลอดจนเพื่อเลือกอุปกรณ์เพิ่มเติมที่เหมาะสมในแง่ของพารามิเตอร์ (เครื่องกำเนิดไฟฟ้า ฯลฯ)
การคำนวณกระแสเริ่มต้นของมอเตอร์ไฟฟ้านั้นดำเนินการในหลายขั้นตอน:
คำนิยาม จัดอันดับปัจจุบัน มอเตอร์ไฟฟ้าสามเฟสกระแสสลับตามสูตร: In \u003d 1000Pn / (Un * cosφ * √ηn) Рн นี่คือพิกัดกำลังของเครื่องยนต์ Un ทำหน้าที่ พิกัดแรงดันไฟฟ้า, และ ηn - สัมประสิทธิ์ระบุ การกระทำที่เป็นประโยชน์. Cosφเป็นปัจจัยด้านกำลังรับการจัดอันดับของมอเตอร์ไฟฟ้า ข้อมูลทั้งหมดนี้สามารถพบได้ในเอกสารทางเทคนิคสำหรับเครื่องยนต์
การคำนวณกระแสเริ่มต้นตามสูตร Istart = In*Kstart In คือค่าเล็กน้อยของกระแส และ Start คืออัตราส่วนของกระแสตรงต่อค่าเล็กน้อย ซึ่งควรระบุไว้ในเอกสารทางเทคนิคสำหรับมอเตอร์ไฟฟ้าด้วย
เมื่อทราบกระแสเริ่มต้นของมอเตอร์ไฟฟ้าแล้ว คุณสามารถเลือกเบรกเกอร์วงจรที่เหมาะสมที่จะป้องกันสายสวิตชิ่งได้
สวัสดีผู้อ่านที่รัก ก่อนจัดการกับวิธีการเชื่อมต่อและลักษณะของกระแสมอเตอร์ ประเภทอะซิงโครนัสมันจะไม่ฟุ่มเฟือยที่จะจำได้ว่ามันคืออะไร
เครื่องนี้เรียกว่าเครื่องยนต์แบบอะซิงโครนัส ชนิดพิเศษซึ่งแปลงพลังงานไฟฟ้าเป็นพลังงานกล คุณสมบัติต่อไปนี้ถือเป็นหลักการทำงานหลักของอุปกรณ์ดังกล่าว ผ่านขดลวดสเตเตอร์ซึ่งเป็นกระแสสลับซึ่งประกอบด้วยสามเฟสสร้างเงื่อนไขสำหรับการปรากฏตัวของสนามแม่เหล็กหมุน ฟิลด์นี้ทำให้โรเตอร์หมุน
โดยปกติเมื่อเชื่อมต่อมอเตอร์จะต้องคำนึงถึงปัจจัยเหล่านี้ทั้งหมดเพราะโรเตอร์จะหมุนไปในทิศทางที่สนามแม่เหล็กหมุน ความเร็วในการหมุนของโรเตอร์นั้นต่ำกว่าความเร็วในการหมุนของสนามกระตุ้น โดยการออกแบบ เครื่องจักรเหล่านี้แตกต่างกันมาก (นั่นคือ ออกแบบมาให้ทำงานในสภาวะที่แตกต่างกัน)
ทั้งลักษณะการทำงานและการเริ่มต้นของอุปกรณ์ดังกล่าวนั้นเหนือกว่ามอเตอร์แบบเฟสเดียวมาก
มอเตอร์ใด ๆ เหล่านี้มีสองส่วนหลัก - แบบเคลื่อนย้ายได้ (โรเตอร์) และแบบคงที่ (สเตเตอร์) ทั้งสองส่วนมีขดลวด ความแตกต่างระหว่างพวกเขาสามารถอยู่ในประเภทของขดลวดโรเตอร์เท่านั้น: สามารถมีวงแหวนของโรเตอร์หรือลัดวงจรได้ เชื่อมต่อเครื่องยนต์กับ โรเตอร์กรงกระรอกและกำลังไฟฟ้าสูงถึงสองร้อยกิโลวัตต์ ผลิตขึ้นตรงไปยังเครือข่าย ต้องต่อมอเตอร์ที่มีกำลังสูงกว่าก่อนถึง สวนท่งแล้วเปลี่ยนเป็นค่าเล็กน้อยเท่านั้น (เพื่อลดกระแสเริ่มต้นหลาย ๆ ครั้ง)
การเชื่อมต่อมอเตอร์แบบอะซิงโครนัส
ขดลวดสเตเตอร์ของเกือบทุกอุปกรณ์ดังกล่าวมีหกลีด (ซึ่งสามอันเป็นจุดเริ่มต้นและสามอันเป็นจุดสิ้นสุด) ข้อสรุปเหล่านี้เชื่อมโยงกับ "ดาว" หรือ "สามเหลี่ยม" ทั้งนี้ขึ้นอยู่กับเครือข่ายแหล่งจ่ายไฟของมอเตอร์ ด้วยเหตุนี้ร่างกายของมอเตอร์แต่ละตัวจึงมีกล่องที่แสดงสายไฟเริ่มต้นและสุดท้ายของขดลวด (ถูกกำหนดตามลำดับ C1, C2, C3 และ C4, C5, C6)
สตาร์คอนเนคชั่น
นี่คือชื่อวิธีการเชื่อมต่อขดลวด ซึ่งทั้งสามขดลวดมีจุดร่วมจุดเดียว (เป็นกลาง) แรงดันไฟฟ้าเชิงเส้นของการเชื่อมต่อดังกล่าวสูงกว่าแรงดันเฟส 1.73 เท่า คุณภาพเชิงบวกของการเชื่อมต่อประเภทนี้ถือเป็นกระแสเริ่มต้นต่ำ แม้ว่าการสูญเสียพลังงานจะค่อนข้างมีนัยสำคัญ
วิธีการเชื่อมต่อแบบเดลต้าจะแตกต่างกันตรงที่วิธีนี้จะทำการเชื่อมต่อในลักษณะที่จุดสิ้นสุดของขดลวดอันหนึ่งกลายเป็นจุดเริ่มต้นของวิธีถัดไป
การเชื่อมต่อเดลต้า
ในเวลาเดียวกันแรงดันเฟสและสายเหมือนกันดังนั้นด้วยแรงดันไฟฟ้า 220 โวลต์รูปสามเหลี่ยมจะเป็นการเชื่อมต่อที่ถูกต้องของขดลวด ด้านบวกของการเชื่อมต่อนี้คือ พลังอันยิ่งใหญ่ในขณะที่กระแสเริ่มต้นเป็นลบ - ใหญ่
ในการย้อนกลับ (เปลี่ยนทิศทางการหมุน) ของมอเตอร์แบบอะซิงโครนัสสามเฟสก็เพียงพอที่จะเปลี่ยนข้อสรุปของสองเฟส ในการผลิต ทำได้โดยใช้สตาร์ทเตอร์แม่เหล็กคู่หนึ่งที่มีการสลับแบบอิสระ
กระแสเริ่มต้นที่มีนัยสำคัญสำหรับมอเตอร์แบบอะซิงโครนัสเป็นสิ่งที่ไม่พึงปรารถนาอย่างมาก เนื่องจากอาจนำไปสู่ผลกระทบของการขาดแรงดันไฟฟ้าสำหรับอุปกรณ์ประเภทอื่นๆ ที่เชื่อมต่อกับเครือข่ายเดียวกัน นี่เป็นเหตุผลที่เมื่อเชื่อมต่อและปรับมอเตอร์ประเภทนี้งานในการลดกระแสเริ่มต้นและเพิ่มความนุ่มนวลของมอเตอร์สตาร์ทโดยใช้อุปกรณ์พิเศษปรากฏขึ้น อุปกรณ์ประเภทที่มีประสิทธิภาพมากที่สุดคือซอฟต์สตาร์ทและตัวแปลงความถี่ คุณสมบัติที่มีค่าที่สุดประการหนึ่งของพวกเขาคือสามารถรักษากระแสไฟสตาร์ทของมอเตอร์ได้เป็นเวลานาน (โดยปกตินานกว่าหนึ่งนาที)
นอกจากวิธีมาตรฐานในการเปิดมอเตอร์แบบอะซิงโครนัสแล้ว ยังมีวิธีการเปิดมอเตอร์เหล่านี้ในเครือข่ายแหล่งจ่ายไฟที่มีเฟสเดียวอีกด้วย
การสตาร์ทแบบคาปาซิทีฟของมอเตอร์เหนี่ยวนำ
สำหรับสิ่งนี้ส่วนใหญ่จะใช้วิธีการเปิดตัวเก็บประจุของตัวเก็บประจุ ตัวเก็บประจุสามารถติดตั้งเป็นหนึ่งหรือคู่ได้ (ตัวเริ่มต้นหนึ่งตัวและตัวที่สองทำงาน) มีการติดตั้งคอนเดอร์คู่หนึ่งเมื่อจำเป็นต้องเปลี่ยนความจุระหว่างการเริ่มต้นใช้งาน ซึ่งทำได้โดยการเชื่อมต่อหรือถอดคอนเดอร์ตัวใดตัวหนึ่ง (สตาร์ทเตอร์) สำหรับสิ่งนี้ตามกฎแล้วจะใช้ภาชนะที่ทำด้วยกระดาษเนื่องจากไม่มีขั้วและสิ่งนี้สำคัญมากเมื่อทำงานกับกระแสสลับ
ในการคำนวณตัวเก็บประจุทำงานมีสูตรดังต่อไปนี้:
ตัวเก็บประจุเริ่มต้นควรมีความจุมากกว่าความจุในการทำงานสองถึงสามเท่าและแรงดันไฟฟ้าที่ใช้งานหนึ่งเท่าครึ่งของแรงดันไฟฟ้า
ตัวเก็บประจุเริ่มต้นและทำงานเชื่อมต่อแบบขนานและในลักษณะที่ความต้านทาน shunt เชื่อมต่อขนานกับตัวเก็บประจุเริ่มต้นและที่ปลายด้านหนึ่ง Conder เริ่มต้นจะเปิดผ่านคีย์ เมื่อสตาร์ทเครื่องยนต์ กุญแจจะถูกปิด เพิ่มกระแสสตาร์ทแล้วเปิดขึ้น
แต่อย่าลืมว่า เครือข่ายเฟสเดียวไม่สามารถเชื่อมต่อทุกเครื่องยนต์ได้ นอกจากนี้กำลังมอเตอร์ในการเชื่อมต่อดังกล่าวจะมีกำลังเพียง 0.5-0.6 ของกำลังของการเชื่อมต่อแบบสามเฟส
มอเตอร์เหนี่ยวนำกระแสเริ่มต้น
ตอนนี้ฉันจะให้ตารางค่าที่อนุญาตของกระแสไม่มีโหลดของมอเตอร์สามเฟส:
| กำลังมอเตอร์ไฟฟ้า kW | ไม่มีกระแสโหลดเป็นเปอร์เซ็นต์ของค่าเล็กน้อย | |||||
| ที่ความเร็วรอบ รอบต่อนาที | ||||||
| 3000 | 1500 | 1000 | 750 | 600 | 500 | |
| 0.12 – 0.55 | 60 | 75 | 85 | 90 | 95 | — |
ก่อนทำการวัดกระแสบนมอเตอร์ จะต้องรันอิน (ทดสอบบน ไม่ทำงาน 30-60 นาที - เครื่องยนต์ที่มีกำลังน้อยกว่า 100 kW และจาก 2 ชั่วโมงสำหรับเครื่องยนต์ที่มีกำลังมากกว่า 100 kW) ตารางนี้ใช้สำหรับอ้างอิงเท่านั้น ดังนั้น ข้อมูลจริงอาจแตกต่างจากเปอร์เซ็นต์เหล่านี้ 10-20%
กระแสเริ่มต้นของมอเตอร์สามารถคำนวณได้โดยใช้สูตรคู่ต่อไปนี้:
Iн=1000Рн/(Un*cosФ*√nн),
โดยที่ Рн คือกำลังระบุของมอเตอร์ Un คือค่าของแรงดันไฟฟ้า nн คือค่าประสิทธิภาพเล็กน้อย
โดยที่ In คือพิกัดกระแส และ Kp คืออัตราส่วนของกระแสตรงต่อค่าเล็กน้อย (ปกติจะระบุไว้ในหนังสือเดินทาง)
เขียนความคิดเห็นเพิ่มเติมในบทความบางทีฉันอาจพลาดอะไรไป ลองดูสิ ฉันจะดีใจถ้าคุณพบสิ่งอื่นที่เป็นประโยชน์กับฉัน ทั้งหมดที่ดีที่สุด
เนื้อหา:เมื่อทำงานกับอุปกรณ์ไฟฟ้าต่างๆ มักจะมีคำถามเกิดขึ้น กระแสไฟเริ่มต้นคืออะไร ในยามที่ รุ่นธรรมดาคำตอบจะเป็นกระแสที่ต้องการเมื่อสตาร์ทมอเตอร์ไฟฟ้าหรืออุปกรณ์อื่นๆ ค่าของมันอาจสูงกว่าค่าเล็กน้อยที่จำเป็นสำหรับการทำงานที่เสถียรตามปกติหลายเท่า ดังนั้น ในการที่จะหมุนโรเตอร์ มอเตอร์ไฟฟ้าจะต้องใช้พลังงานมากกว่ามากเมื่อเทียบกับการวิ่งด้วยความเร็วคงที่ กระแสเริ่มต้นสามารถลดลงได้โดย ระบบพิเศษ blanking และอุปกรณ์ ซอฟต์สตาร์ท.
กระแสเริ่มต้นของมอเตอร์ไฟฟ้า
ในแต่ละอุปกรณ์ อุปกรณ์ หรือกลไก มีกระบวนการที่เรียกว่ากระบวนการเริ่มต้น สิ่งนี้จะสังเกตเห็นได้ชัดเจนเป็นพิเศษในช่วงเริ่มต้นของการเคลื่อนไหว เมื่อคุณต้องขยับออก ในขณะนี้ สำหรับการกดครั้งแรก ต้องใช้ความพยายามมากกว่าระหว่างการดำเนินการต่อไปของกลไกนี้
ปรากฏการณ์เดียวกันนั้นส่งผลกระทบ อุปกรณ์ไฟฟ้า- มอเตอร์ไฟฟ้า แม่เหล็กไฟฟ้า โคมไฟ และอื่นๆ การมีอยู่ของกระบวนการเริ่มต้นในแต่ละรายการขึ้นอยู่กับสถานะของรายการงาน ตัวอย่างเช่น ไส้หลอดของหลอดไฟธรรมดาในสภาวะเย็นมีความต้านทานน้อยกว่าเมื่อให้ความร้อนในโหมดการทำงานที่ 1,000 0 C มาก นั่นคือสำหรับหลอดไฟที่มีกำลังไฟ 100 W ความต้านทานของ ฟิลาเมนต์ระหว่างการทำงานจะอยู่ที่ประมาณ 490 โอห์ม และในสถานะปิด ตัวบ่งชี้นี้จะลดลงเหลือ 50 โอห์ม ดังนั้นเมื่อกระแสไฟเริ่มต้นสูงบางครั้งหลอดไฟก็หมดไฟ พวกเขาได้รับการช่วยเหลือจากความเหนื่อยหน่ายทั่วไปโดยความต้านทานซึ่งเพิ่มขึ้นเมื่อได้รับความร้อน จะค่อยๆ ไปถึงค่าคงที่และช่วยจำกัดกระแสการทำงานให้เป็นค่าที่ต้องการ

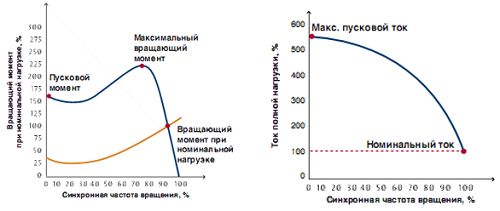
อิทธิพลของกระแสเริ่มต้นส่งผลกระทบอย่างเต็มที่กับมอเตอร์ไฟฟ้าทุกประเภท ซึ่งใช้กันอย่างแพร่หลายในหลายพื้นที่ เพื่อใช้งานไดรฟ์ไฟฟ้าอย่างถูกต้อง คุณจำเป็นต้องทราบลักษณะการเริ่มต้นของไดรฟ์ มีสองพารามิเตอร์หลักที่ส่งผลต่อกระแสเริ่มต้น สลิปคือตัวเชื่อมระหว่างความเร็วของโรเตอร์กับความเร็วของการหมุนของสนามแม่เหล็กไฟฟ้า การลดลงของสลิปเกิดขึ้นจาก 1 เป็นค่าต่ำสุดเมื่อความเร็วเพิ่มขึ้น แรงบิดเริ่มต้นเป็นพารามิเตอร์ตัวที่สองที่กำหนดระดับของภาระทางกลบนเพลา ภาระนี้มีค่าสูงสุดในขณะที่เริ่มต้นและกลายเป็นค่าเล็กน้อยหลังจากกลไกเร่งเต็มที่
ควรคำนึงถึงคุณสมบัติ มอเตอร์ไฟฟ้าแบบอะซิงโครนัสซึ่งเมื่อสตาร์ทเครื่องจะเทียบเท่ากับหม้อแปลงไฟฟ้าลัดวงจร ขดลวดทุติยภูมิ. มีความต้านทานน้อยมาก ดังนั้นค่าของกระแสเริ่มต้นในระหว่างการกระโดดสามารถมีค่าเกินได้หลายเท่าเมื่อเทียบกับค่าที่ระบุ ในกระบวนการจ่ายกระแสไฟเพิ่มเติมไปยังขดลวด แกนโรเตอร์จะเริ่มอิ่มตัวอย่างค่อยเป็นค่อยไป สนามแม่เหล็ก. มี EMF ของการเหนี่ยวนำตนเองภายใต้อิทธิพลของความต้านทานอุปนัยของวงจรเริ่มเติบโต เมื่อเริ่มต้นการหมุนของโรเตอร์ค่าสัมประสิทธิ์การลื่นจะลดลงนั่นคือระยะเร่งความเร็วของเครื่องยนต์จะเริ่มขึ้น ด้วยความต้านทานที่เพิ่มขึ้น กระแสเริ่มต้นจะลดลงเป็นค่ามาตรฐาน
ระหว่างการใช้งานอาจเกิดปัญหาที่เกี่ยวข้องกับกระแสไฟเริ่มต้นที่เพิ่มขึ้น สาเหตุของการเกิดขึ้นบ่อยที่สุดคือความร้อนสูงเกินไปของมอเตอร์ไฟฟ้าโอเวอร์โหลด ไฟฟ้าของเน็ตเมื่อสตาร์ทเครื่อง เช่นเดียวกับแรงกระแทกทางกลในอุปกรณ์และกลไกที่เชื่อมต่อ เช่น กระปุกเกียร์และอื่นๆ เพื่อแก้ปัญหานี้มีการนำเสนออุปกรณ์พิเศษ ตัวแปลงความถี่และซอฟต์สตาร์ทเตอร์ พวกเขาได้รับการคัดเลือกโดยคำนึงถึงลักษณะของการทำงานของมอเตอร์ไฟฟ้าโดยเฉพาะ ตัวอย่างเช่น ส่วนใหญ่จะใช้สำหรับยูนิตที่เชื่อมต่อกับพัดลม ด้วยความช่วยเหลือของพวกเขา กระแสเริ่มต้นถูกจำกัดไว้เพียงสองระดับ มันค่อนข้าง อัตราปกติเพราะในช่วงสตาร์ทปกติกระแสไฟเกินค่าพิกัด 5-10 เท่า ข้อ จำกัด ทำได้โดยการเปลี่ยนแรงดันไฟฟ้าในขดลวด
มอเตอร์ AC แบบธรรมดาเป็นที่แพร่หลายในอุตสาหกรรมการผลิตเนื่องจากการออกแบบที่เรียบง่ายและต้นทุนต่ำ ข้อเสียที่ร้ายแรงของพวกเขาถือเป็นการเริ่มต้นที่หนักหน่วงซึ่งได้รับการอำนวยความสะดวกอย่างมากจากตัวแปลงความถี่ คุณภาพที่มีค่าที่สุดของอุปกรณ์เหล่านี้คือความสามารถในการรองรับกระแสไฟเข้าเป็นเวลาหนึ่งนาทีหรือมากกว่า อุปกรณ์ที่ทันสมัยที่สุดไม่เพียงแต่จะควบคุมการเริ่มต้นเท่านั้น แต่ยังปรับให้เหมาะสมตามลักษณะประสิทธิภาพที่กำหนดไว้ล่วงหน้าด้วย
กระแสไฟเริ่มต้นของแบตเตอรี่
แบตเตอรี่ไม่ได้ไร้ประโยชน์ถือเป็นหนึ่งในองค์ประกอบสำคัญของรถ หน้าที่หลักคือการจ่ายแรงดันไฟให้กับอุปกรณ์ไฟฟ้าที่มีอยู่ โดยทั่วไปจะเป็นสตาร์ทเตอร์ ไฟส่องสว่าง และอุปกรณ์อื่นๆ เพื่อที่จะแก้ปัญหานี้ได้สำเร็จ แบตเตอรี่ต้องไม่เพียงสะสมแต่ต้องเก็บประจุไว้เป็นเวลานาน
หนึ่งในพารามิเตอร์หลักของแบตเตอรี่คือกระแสไฟเริ่มต้น ค่านี้สอดคล้องกับพารามิเตอร์ของกระแสที่ไหลในสตาร์ทเตอร์ในเวลาที่สตาร์ท เริ่มต้นปัจจุบันเกี่ยวข้องโดยตรงกับโหมดการทำงานของรถ ถ้า ยานพาหนะใช้งานบ่อยมากโดยเฉพาะในสภาพอากาศหนาวเย็น ในกรณีนี้ แบตเตอรี่ต้องมีกระแสไฟเริ่มต้นสูง พารามิเตอร์ปกติของมันมักจะเป็นไปตามกำลังของแหล่งพลังงานซึ่งออกเป็นเวลา 30 วินาทีที่อุณหภูมิลบ 18 0 C จะปรากฏขึ้นในขณะที่บิดกุญแจในการจุดระเบิดและสตาร์ทเตอร์เริ่มทำงาน ค่าปัจจุบันวัดเป็นแอมแปร์
กระแสเริ่มต้นอาจแตกต่างกันโดยสิ้นเชิงสำหรับแบตเตอรี่ที่มีลักษณะและลักษณะพื้นฐานเหมือนกัน ปัจจัยนี้ได้รับอิทธิพลอย่างมากจาก คุณสมบัติทางกายภาพวัสดุสำหรับการผลิตและ คุณสมบัติการออกแบบแต่ละผลิตภัณฑ์ ตัวอย่างเช่น สามารถสังเกตการเพิ่มขึ้นของกระแสได้หากแผ่นตะกั่วมีรูพรุน จำนวนเพิ่มขึ้น กรดออร์โธฟอสฟอริกถูกใช้ ค่าปัจจุบันที่ประเมินสูงเกินไปไม่ได้ ผลกระทบด้านลบบนอุปกรณ์จะช่วยเพิ่มความน่าเชื่อถือในการสตาร์ทเท่านั้น
กระแสโหลดรวม Ia ที่จ่ายให้กับมอเตอร์คำนวณโดยใช้สูตรต่อไปนี้:
ที่ไหน
คือ: เต็มปัจจุบัน(แต่)
Pn: กำลังไฟพิกัด (kW)
U: แรงดันเฟสต่อเฟสสำหรับมอเตอร์ 3 เฟส และแรงดันระหว่างขั้วสำหรับมอเตอร์ 1 เฟส (V) สามารถต่อมอเตอร์ 1 เฟสกับเฟสหรือ แรงดันไฟฟ้า
η: ประสิทธิภาพ เช่น กำลังขับ (kW) / กำลังไฟฟ้าเข้า (kW)
cos φ : ตัวประกอบกำลังเช่น กำลังไฟฟ้าเข้า (kW) / กำลังไฟฟ้าเข้า (kVA)
การตั้งค่ากระแสเกินและการป้องกัน
- ค่าสูงสุดของกระแส supertransient อาจสูงมาก โดยทั่วไป ค่านี้จะเท่ากับ 12-15 เท่าของค่า rms เล็กน้อย Inm บางครั้งค่านี้อาจสูงถึง 25 เท่าของค่า Inm
- เซอร์กิตเบรกเกอร์ คอนแทคเตอร์ และรีเลย์ความร้อนได้รับการออกแบบมาเพื่อสตาร์ทมอเตอร์ที่กระแสชั่วคราวที่สูงมาก
- ในกรณีที่มีการป้องกันกระแสเกินเมื่อเริ่มทำงานกะทันหัน แสดงว่ากระแสไฟเริ่มต้นเกินขีดจำกัดปกติ เป็นผลให้สามารถเข้าถึงค่าขีด จำกัด ของพารามิเตอร์ได้ สวิตช์เกียร์อายุการใช้งานอาจสั้นลงและแม้แต่อุปกรณ์บางอย่างก็อาจล้มเหลว เพื่อหลีกเลี่ยงสถานการณ์ดังกล่าว จำเป็นต้องพิจารณาปัญหาในการเพิ่มพารามิเตอร์การจัดอันดับของสวิตช์เกียร์
- สวิตช์เกียร์ได้รับการออกแบบมาเพื่อป้องกันมอเตอร์สตาร์ทจากการลัดวงจร ตารางแสดงการรวมกันระหว่างเซอร์กิตเบรกเกอร์ คอนแทคเตอร์ และรีเลย์ความร้อน ทั้งนี้ขึ้นอยู่กับความเสี่ยง เพื่อให้มีการประสานงานประเภท 1 หรือ 2
กระแสไฟสตาร์ทมอเตอร์
แม้ว่าตลาดจะมีมอเตอร์ประสิทธิภาพสูง แต่ในทางปฏิบัติกระแสเริ่มต้นของมอเตอร์นั้นใกล้เคียงกับมอเตอร์มาตรฐานโดยประมาณ
การใช้เดลต้าสตาร์ทเตอร์ ซอฟต์สตาร์ทแบบคงที่หรือไดรฟ์แบบปรับความเร็วได้สามารถลดกระแสสตาร์ท (เช่น 4 Ia แทนที่จะเป็น 7.5 Ia)
การชดเชยกำลังไฟฟ้ารีแอกทีฟ (kvar) ที่จ่ายให้กับมอเตอร์แบบอะซิงโครนัส
ตามกฎแล้ว ด้วยเหตุผลทางเทคนิคและทางการเงิน การลดกระแสไฟที่จ่ายให้กับมอเตอร์แบบอะซิงโครนัสจะทำกำไรได้มากกว่า สิ่งนี้สามารถทำได้โดยการใช้ตัวเก็บประจุโดยไม่ส่งผลกระทบต่อกำลังขับของมอเตอร์
การใช้หลักการนี้เพื่อเพิ่มประสิทธิภาพการทำงานของมอเตอร์เหนี่ยวนำเรียกว่า "การปรับปรุงตัวประกอบกำลัง" หรือ "การชดเชย" พลังงานปฏิกิริยา».
ตามที่กล่าวไว้ในบท การชดเชยกำลังไฟฟ้ารีแอกทีฟและการกรองฮาร์มอนิก พลังงานปรากฏ (kVA) ที่ส่งไปยังมอเตอร์สามารถลดลงได้อย่างมากโดยใช้ตัวเก็บประจุที่เชื่อมต่อแบบขนาน อินพุตลดลง พลังงานเต็มหมายถึงการลดลงของกระแสอินพุตที่สอดคล้องกัน (เนื่องจากแรงดันคงที่)
แนะนำให้ใช้การชดเชยกำลังไฟฟ้ารีแอกทีฟเป็นพิเศษสำหรับมอเตอร์ที่มีการทำงานลดกำลังไฟฟ้าลงเป็นระยะเวลานาน
ตามที่ระบุไว้ข้างต้น,
![]()
ดังนั้นการลดกำลังไฟฟ้าเข้าที่ชัดเจน (kVA) ส่งผลให้ค่า cos φ เพิ่มขึ้น (เช่น การปรับปรุง)
กระแสที่จ่ายให้กับมอเตอร์หลังจากการชดเชยกำลังไฟฟ้ารีแอกทีฟคำนวณโดยสูตร:
![]()
โดยที่: cos φ เป็นตัวประกอบกำลังก่อนการชดเชย cos φ' คือตัวประกอบกำลังหลังการชดเชย Ia คือกระแสเริ่มต้น
ข้าว. A4ด้านล่างแสดง (ขึ้นอยู่กับกำลังมอเตอร์ที่กำหนด) ค่ากระแสมาตรฐานสำหรับแรงดันไฟฟ้าหลายตัว
| กิโลวัตต์ | hp | 230V | 380 - 415 บาท | 400B | 440 - 480V | 500B | 690B |
|---|---|---|---|---|---|---|---|
| อา | อา | อา | อา | อา | อา | ||
| 0,18 0,25 0,37 |
- - - |
1,0 1,5 1,9 |
- - - |
0,6 0,85 1,1 |
- - - |
0,48 0,68 0,88 |
0,35 0,49 0,64 |
| - 0,55 - |
1/2 - 3/4 |
- 2,6 - |
1,3 - 1,8 |
- 1,5 - |
1,1 - 1,6 |
- 1,2 - |
- 0,87 - |
| - 0,75 1,1 |
1 - - |
- 3,3 4,7 |
2,3 - - |
- 1,9 2,7 |
2,1 - - |
- 1,5 2,2 |
- 1,1 1,6 |
| - - 1,5 |
1-1/2 2 - |
- - 6,3 |
3,3 4,3 - |
- - 3,6 |
3,0 3,4 - |
- - 2,9 |
- - 2,1 |
| 2,2 - 3,0 |
- 3 - |
8,5 - 11,3 |
- 6,1 - |
4,9 - 6,5 |
- 4,8 - |
3,9 - 5,2 |
2,8 - 3,8 |
| 3,7 4 5,5 |
- - - |
- 15 20 |
- 9,7 - |
- 8,5 11,5 |
- 7,6 - |
- 6,8 9,2 |
- 4,9 6,7 |
| - - 7,5 |
7-1/2 10 - |
- - 27 |
14,0 18,0 - |
- - 15,5 |
11,0 14,0 - |
- - 12,4 |
- - 8,9 |
| 11 - - |
- 15 20 |
38,0 - - |
- 27,0 34,0 |
22,0 - - |
- 21,0 27,0 |
17,6 - - |
12,8 - - |
| 15 18,5 - |
- - 25 |
51 61 - |
- - 44 |
39 35 - |
- - 34 |
23 28 - |
17 21 - |
| 22 - - |
- 30 40 |
72 - - |
- 51 66 |
41 - - |
- 40 52 |
33 - - |
24 - - |
| 30 37 - |
- - 50 |
96 115 - |
- - 83 |
55 66 - |
- - 65 |
44 53 - |
32 39 - |
| - 45 55 |
60 - - |
- 140 169 |
103 - - |
- 80 97 |
77 - - |
- 64 78 |
- 47 57 |
| - - 75 |
75 100 - |
- - 230 |
128 165 - |
- - 132 |
96 124 - |
- - 106 |
- - 77 |
| 90 - 110 |
- 125 - |
278 - 340 |
- 208 - |
160 - 195 |
- 156 - |
128 - 156 |
93 - 113 |
| - 132 - |
150 - 200 |
- 400 - |
240 - 320 |
- 230 - |
180 - 240 |
- 184 - |
- 134 - |
| 150 160 185 |
- - - |
- 487 - |
- - - |
- 280 - |
- - - |
- 224 - |
- 162 - |
| - 200 220 |
250 - - |
- 609 - |
403 - - |
- 350 - |
302 - - |
- 280 - |
- 203 - |
| - 250 280 |
300 - - |
- 748 - |
482 - - |
- 430 - |
361 - - |
- 344 - |
- 250 - |
| - - 300 |
350 400 - |
- - - |
560 636 - |
- - - |
414 474 - |
- - - |
- - - |
| 315 - 335 |
- 540 - |
940 - - |
- - - |
540 - - |
- 515 - |
432 - - |
313 - - |
| 355 - 375 |
- 500 - |
1061 - - |
- 786 - |
610 - - |
- 590 - |
488 - - |
354 - - |
| 400 425 450 |
- - - |
1200 - - |
- - - |
690 - - |
- - - |
552 - - |
400 - - |
| 475 500 530 |
- - - |
- 1478 - |
- - - |
- 850 - |
- - - |
- 680 - |
- 493 - |
| 560 600 630 |
- - - |
1652 - 1844 |
- - - |
950 - 1060 |
- - - |
760 - 848 |
551 - 615 |
| 670 710 750 |
- - - |
- 2070 - |
- - - |
- 1190 - |
- - - |
- 952 - |
- 690 - |
| 800 850 900 |
- - - |
2340 - 2640 |
- - - |
1346 - 1518 |
- - - |
1076 - 1214 |
780 - 880 |
| 950 1000 |
- - |
- 2910 |
- - |
- 1673 |
- - |
- 1339 |
- 970 |
ข้าว. A4: กำลังไฟพิกัดและกระแสน้ำ