ลักษณะทางกลของมอเตอร์เรียกว่าการพึ่งพาความเร็วของโรเตอร์กับแรงบิดบนเพลา n = f (M2) เนื่องจากแรงบิดรอบเดินเบามีน้อยภายใต้ภาระ ดังนั้น M2 ≈ M และลักษณะทางกลจึงแสดงด้วยการพึ่งพา n = f (M) หากเราคำนึงถึงความสัมพันธ์ s = (n1 - n) / n1 จากนั้นคุณสมบัติทางกลสามารถรับได้โดยการนำเสนอการพึ่งพาแบบกราฟิกในพิกัด n และ M (รูปที่ 1)
ข้าว. 1. ลักษณะทางกลของมอเตอร์แบบอะซิงโครนัส
ลักษณะทางกลตามธรรมชาติของมอเตอร์เหนี่ยวนำสอดคล้องกับวงจรหลัก (หนังสือเดินทาง) ของการรวมและพารามิเตอร์เล็กน้อยของแรงดันไฟฟ้า ลักษณะประดิษฐ์จะได้รับหากมีองค์ประกอบเพิ่มเติม: ตัวต้านทาน, เครื่องปฏิกรณ์, ตัวเก็บประจุ เมื่อเครื่องยนต์ถูกขับเคลื่อน พิกัดแรงดันไฟฟ้าลักษณะยังแตกต่างจากลักษณะทางกลตามธรรมชาติ
ลักษณะทางกลเป็นเครื่องมือที่สะดวกและมีประโยชน์มากในการวิเคราะห์โหมดสถิตและไดนามิกของไดรฟ์ไฟฟ้า
ประเด็นหลักของลักษณะทางกล: สลิปและความถี่วิกฤต แรงบิดสูงสุด แรงบิดเริ่มต้น แรงบิดพิกัด
ลักษณะทางกลขึ้นอยู่กับแรงบิดบนสลิปหรือกล่าวอีกนัยหนึ่งคือจำนวนรอบ:
![]()
จากการแสดงออก  จะเห็นได้ว่าการพึ่งพาอาศัยกันนี้ซับซ้อนมากเนื่องจากตามสูตรที่แสดง)
จะเห็นได้ว่าการพึ่งพาอาศัยกันนี้ซับซ้อนมากเนื่องจากตามสูตรที่แสดง)  และ
และ  สลิปรวมอยู่ในนิพจน์สำหรับ .ด้วย ฉัน 2
และ เพราะ? 2. ลักษณะทางกลของมอเตอร์เหนี่ยวนำมักจะแสดงเป็นภาพกราฟิก
สลิปรวมอยู่ในนิพจน์สำหรับ .ด้วย ฉัน 2
และ เพราะ? 2. ลักษณะทางกลของมอเตอร์เหนี่ยวนำมักจะแสดงเป็นภาพกราฟิก
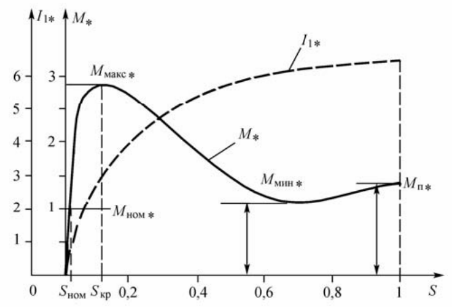
จุดเริ่มต้นของคุณสมบัติสอดคล้องกับ น= 0 และ ส= 1: นี่เป็นช่วงแรกที่มอเตอร์สตาร์ท แรงบิดเริ่มต้น ม น - ลักษณะสำคัญของคุณสมบัติการทำงานของเครื่องยนต์ ถ้า ม น มีขนาดเล็ก น้อยกว่าแรงบิดในการทำงานที่กำหนด มอเตอร์สามารถสตาร์ทได้เฉพาะขณะเดินเบาหรือโหลดทางกลที่ลดลงตามลำดับ
แสดงด้วยสัญลักษณ์ Mnp โมเมนต์ตอบโต้ (เบรก) ที่เกิดจากภาระทางกลบนเพลาซึ่งเครื่องยนต์สตาร์ท เงื่อนไขที่ชัดเจนสำหรับความสามารถในการสตาร์ทเครื่องยนต์คือ: ม น > Mnp . หากตรงตามเงื่อนไขนี้ โรเตอร์มอเตอร์จะเริ่มเคลื่อนที่ จำนวนรอบ นจะเพิ่มขึ้นและลื่น สลด. ดังที่คุณเห็นจากภาพด้านบน แรงบิดของเครื่องยนต์จะเพิ่มขึ้นจาก ม น สูงสุด ม ม สอดคล้องกับสลิปวิกฤต ส kpดังนั้นกำลังเครื่องยนต์ส่วนเกินที่มีอยู่ซึ่งพิจารณาจากความแตกต่างของแรงบิดก็เพิ่มขึ้นเช่นกัน เอ็มและ Mnp .
ยิ่งความแตกต่างระหว่างแรงบิดของมอเตอร์ที่มีอยู่ (เป็นไปได้สำหรับสลิปที่กำหนดบนเส้นโค้งประสิทธิภาพ) เอ็ม และต่อต้าน M np โหมดสตาร์ทยิ่งง่ายขึ้นและเครื่องยนต์ยิ่งเร็วขึ้นถึงความเร็วรอบคงที่
ตามลักษณะทางกลแสดงให้เห็น ที่รอบจำนวนหนึ่ง (at ส = ส kp) แรงบิดของมอเตอร์ที่มีอยู่ถึงค่าสูงสุดที่เป็นไปได้สำหรับ เครื่องยนต์นี้(ที่แรงดันไฟฟ้าที่กำหนด ยู ) ค่า เอ็ม t . นอกจากนี้ เครื่องยนต์ยังคงเพิ่มความเร็วในการหมุนต่อไป แต่แรงบิดที่มีอยู่จะลดลงอย่างรวดเร็ว สำหรับค่าบางอย่าง นและ สแรงบิดของเครื่องยนต์จะเท่ากับการตอบโต้: การสตาร์ทเครื่องยนต์สิ้นสุดลง จำนวนรอบการหมุนถูกกำหนดเป็นค่าที่สอดคล้องกับอัตราส่วน:
![]()
อัตราส่วนนี้จำเป็นสำหรับโหมดโหลดของเครื่องยนต์ทั้งหมด นั่นคือ สำหรับค่าทั้งหมด Mnp , ไม่เกินแรงบิดสูงสุดของเครื่องยนต์ เอ็ม t . ภายในขีดจำกัดเหล่านี้ เครื่องยนต์จะปรับให้เข้ากับความผันผวนของโหลดทั้งหมดโดยอัตโนมัติ: หากในระหว่างการทำงานของเครื่องยนต์ ภาระทางกลจะเพิ่มขึ้นชั่วขณะหนึ่ง เอ็ม npเครื่องยนต์จะมีแรงบิดมากขึ้น ความเร็วของเครื่องยนต์จะเริ่มลดลงและแรงบิดจะเพิ่มขึ้น
ความเร็วในการหมุนจะถูกตั้งไว้ที่ระดับใหม่ที่สอดคล้องกับความเท่าเทียมกัน เอ็ม และ Mnp . เมื่อโหลดลดลง กระบวนการเปลี่ยนเป็นโหมดโหลดใหม่จะย้อนกลับ
ถ้าโหลดโมเมนต์ Mnp จะเกิน เอ็ม t เครื่องยนต์จะหยุดทันทีเพราะเมื่อความเร็วลดลงอีก แรงบิดของเครื่องยนต์จะลดลง
ดังนั้นแรงบิดสูงสุดของมอเตอร์ เอ็ม tเรียกอีกอย่างว่าพลิกคว่ำหรือช่วงเวลาวิกฤติ
ถ้าสูตรในขณะนั้น ![]() ทดแทน:
ทดแทน:
จากนั้นเราได้รับ:
หาอนุพันธ์อันดับ 1 ของ เอ็ม โดยและเท่ากับศูนย์เราพบว่าค่าสูงสุดของแรงบิดเกิดขึ้นภายใต้เงื่อนไข:
นั่นคือด้วยสลิปดังกล่าว ส = s kp ซึ่งความต้านทานเชิงแอคทีฟของโรเตอร์เท่ากับความต้านทานอุปนัย
![]()
ค่านิยม s kp มอเตอร์เหนี่ยวนำส่วนใหญ่อยู่ในช่วง 10 - 25%
ถ้าในขณะที่สูตรที่เขียนข้างต้น แทน ความต้านทานที่ใช้งาน r 2 แทนอุปนัยตามสูตร
![]()
แรงบิดสูงสุดของมอเตอร์เหนี่ยวนำเป็นสัดส่วนกับกำลังสองของฟลักซ์แม่เหล็ก (และด้วยเหตุนี้กับกำลังสองของแรงดันไฟฟ้า) และแปรผกผันกับการเหนี่ยวนำการรั่วของขดลวดของโรเตอร์
ที่แรงดันคงที่ที่จ่ายให้กับมอเตอร์ ฟลักซ์ของมัน F ยังคงแทบไม่เปลี่ยนแปลง
การเหนี่ยวนำการรั่วไหลของวงจรโรเตอร์นั้นคงที่ในทางปฏิบัติเช่นกัน ดังนั้น เมื่อความต้านทานแอคทีฟเปลี่ยนแปลงในวงจรโรเตอร์ ค่าสูงสุดของแรงบิด เอ็ม t จะไม่เปลี่ยนแปลง แต่จะเกิดขึ้นที่สลิปที่แตกต่างกัน (ด้วยการเพิ่มความต้านทานแอคทีฟของโรเตอร์ - ที่ค่าสลิปขนาดใหญ่)
เห็นได้ชัดว่าภาระสูงสุดของเครื่องยนต์นั้นถูกกำหนดโดยค่าของมัน เอ็ม t . ส่วนการทำงานของคุณลักษณะของเครื่องยนต์อยู่ในช่วงรอบที่แคบตั้งแต่ นที่สอดคล้องกัน เอ็ม t , ก่อน. ที่ น = น 1 (จุดสิ้นสุดลักษณะเฉพาะ) เอ็ม = 0 เนื่องจากที่ความเร็วซิงโครนัสของโรเตอร์ ส = 0 และ ฉัน2 = 0.
แรงบิดที่กำหนดซึ่งกำหนดค่าของกำลังแผ่นป้ายของเครื่องยนต์มักจะมีค่าเท่ากับ 0.4 - 0.6 ของ เอ็ม t . ดังนั้นมอเตอร์แบบอะซิงโครนัสจึงอนุญาตให้โอเวอร์โหลดระยะสั้นได้ 2 - 2.5 เท่า
พารามิเตอร์หลักที่แสดงลักษณะโหมดการทำงานของมอเตอร์แบบอะซิงโครนัสคือสลิป s - ความแตกต่างสัมพัทธ์ระหว่างความถี่ของการหมุนของมอเตอร์โรเตอร์ n และสนามของมัน n o: s = (n o - n) / n o .
พื้นที่ของลักษณะทางกลที่สอดคล้องกับ 0 ≤ s ≤ 1 คือพื้นที่ของโหมดมอเตอร์และที่ s< s кр работа двигателя устойчива, при s >s cr - ไม่เสถียร สำหรับ s< 0 и s >แรงบิดของมอเตอร์ 1 ตัวถูกควบคุมโดยทิศทางการหมุนของโรเตอร์
ส่วนที่เสถียรของลักษณะทางกลของเครื่องยนต์มักอธิบายโดยสูตร Kloss โดยการแทนที่พารามิเตอร์ของโหมดระบุซึ่งเป็นไปได้ที่จะกำหนดสลิปวิกฤต s cr:
 ,
,
โดยที่: λ = M kp / M n - ความจุเกินของเครื่องยนต์
ลักษณะทางกลตามข้อมูลของหนังสืออ้างอิงหรือแคตตาล็อกสามารถสร้างขึ้นได้ประมาณสี่จุด (รูปที่ 7.1):
จุดที่ 1 - สมบูรณ์แบบ ไม่ทำงาน, n \u003d n o \u003d 60 f / p, M \u003d 0 โดยที่: p คือจำนวนคู่ของเสา สนามแม่เหล็กเครื่องยนต์;
จุดที่ 2 - ระบุ, โหมด: n = n n, M = M n = 9550 P n / n n โดยที่ P n - จัดอันดับอำนาจเครื่องยนต์เป็นกิโลวัตต์
จุดที่ 3 - โหมดวิกฤติ: n = n cr, M = M cr =λ M n;
จุดที่ 4 - โหมดเริ่มต้น: n = 0, M = M start = β M n
เมื่อวิเคราะห์การทำงานของเครื่องยนต์ในช่วงโหลดสูงถึง M n และมากกว่านั้น ส่วนที่เสถียรของคุณสมบัติทางกลสามารถอธิบายได้โดยประมาณโดยสมการของเส้นตรง n = n 0 - vM โดยที่ค่าสัมประสิทธิ์ "v" กำหนดได้ง่ายโดยการแทนที่พารามิเตอร์ของโหมดระบุ n n และ M n ลงในสมการ
การออกแบบขดลวดสเตเตอร์ ขดลวดแบบชั้นเดียวและสองชั้น
ตามการออกแบบของขดลวด ขดลวดจะถูกแบ่งออกเป็นขดลวดหลวมที่มีขดลวดอ่อน และขดลวดที่มีขดลวดแข็งหรือกึ่งขดลวด ซอฟต์คอยล์ทำจากลวดหุ้มฉนวนกลม เพื่อให้มีรูปร่างตามต้องการ พวกเขาจะเย็บพรีเวดบนเทมเพลต แล้ววางในร่องสี่เหลี่ยมคางหมูที่แยกออกมา (ดูรูปที่ 3.4 ใน, Gและ 3.5 ใน); ปะเก็นฉนวนแบบเฟสต่อเฟสถูกติดตั้งระหว่างการพันขดลวด จากนั้นขดลวดจะเสริมความแข็งแกร่งในร่องด้วยความช่วยเหลือของเวดจ์หรือฝาครอบพวกมันจะได้รับรูปร่างสุดท้าย (ส่วนหน้าถูกสร้างขึ้น) ขดลวดนั้นถูกพันด้วยผ้าพันแผลและชุบ กระบวนการผลิตทั้งหมดของขดลวดหลวมสามารถใช้เครื่องจักรได้อย่างเต็มที่
ขดลวดแข็ง (half-coils) ทำจากลวดฉนวนรูปสี่เหลี่ยมผืนผ้า พวกเขาจะได้รูปทรงสุดท้ายก่อนที่จะถูกวางลงในร่อง ในเวลาเดียวกันฉนวนตัวถังและเฟสต่อเฟสถูกนำไปใช้กับพวกเขา จากนั้นขดลวดจะถูกวางไว้ในร่องเปิดหรือกึ่งเปิดที่หุ้มฉนวนไว้ล่วงหน้า , เสริมสร้างและชุบ
1. ขดลวดชั้นเดียว- เหมาะที่สุดสำหรับการวางยานยนต์ เนื่องจากในกรณีนี้ ขดลวดจะต้องมีศูนย์กลางและพอดีกับช่องสเตเตอร์ทั้งสองด้านของขดลวดพร้อมกัน อย่างไรก็ตามการใช้งานทำให้สิ้นเปลืองลวดพันมากขึ้นเนื่องจากส่วนหน้ายาวมาก นอกจากนี้ ในขดลวดดังกล่าว เป็นไปไม่ได้ที่จะลดระยะพิทช์ ซึ่งจะทำให้รูปร่างของสนามแม่เหล็กในช่องว่างอากาศเสื่อมลง การสูญเสียเพิ่มเติมเพิ่มขึ้น และลดลง ลักษณะทางกลและเสียงรบกวนที่เพิ่มขึ้น อย่างไรก็ตาม เนื่องจากความเรียบง่ายและต้นทุนต่ำ ขดลวดดังกล่าวจึงถูกนำมาใช้กันอย่างแพร่หลายใน มอเตอร์แบบอะซิงโครนัสกำลังไฟขนาดเล็กถึง 10-15 กิโลวัตต์
2. ขดลวดสองชั้น- ทำให้ระยะพิทช์ของขดลวดสั้นลงด้วยการแบ่งฟันจำนวนเท่าใดก็ได้ ซึ่งช่วยปรับปรุงรูปร่างของสนามแม่เหล็กที่เกิดจากขดลวดและยับยั้งฮาร์โมนิกที่สูงขึ้นในกราฟ EMF นอกจากนี้ด้วยขดลวดสองชั้นทำให้ได้รูปแบบการเชื่อมต่อที่ง่ายกว่าซึ่งทำให้การผลิตขดลวดง่ายขึ้น ขดลวดดังกล่าวใช้สำหรับมอเตอร์ที่มีกำลังมากกว่า 100 กิโลวัตต์พร้อมขดลวดแข็งที่วางด้วยมือ
ขดลวดสเตเตอร์ขดลวดคลื่นชั้นเดียวและสองชั้น
ในร่องของแกนสเตเตอร์จะวางขดลวดหลายเฟสซึ่งเชื่อมต่อกับเครือข่าย กระแสสลับ. ขดลวดสมมาตรหลายเฟสที่มีจำนวนเฟส tรวม tขดลวดเฟสที่เชื่อมต่อเป็นรูปดาวหรือรูปหลายเหลี่ยม ตัวอย่างเช่น ในกรณี ขดลวดสามเฟสจำนวนสเตเตอร์ของเฟส เสื้อ = 3 และขดลวดสามารถเชื่อมต่อกับดาวหรือเดลต้า ระหว่างกัน ขดลวดเฟสจะเลื่อนเป็นมุม 360 / tลูกเห็บ; สำหรับขดลวดสามเฟส มุมนี้คือ 120°
ขดลวดเฟสทำจากขดลวดแยกที่เชื่อมต่อแบบอนุกรม แบบขนาน หรือแบบขนานแบบอนุกรม ในกรณีนี้ ภายใต้ รีลขดลวดสเตเตอร์หลายรอบเชื่อมต่อกันเป็นชุด โดยวางไว้ในร่องเดียวกันและมีฉนวนทั่วไปสัมพันธ์กับผนังของร่อง ถึงคราวของมัน ม้วนพิจารณาตัวนำที่ใช้งานสองตัว (เช่นตั้งอยู่ในแกนสเตเตอร์เอง) วางในสองร่องใต้เสาตรงข้ามที่อยู่ติดกันและเชื่อมต่อกันเป็นอนุกรม ตัวนำที่อยู่นอกแกนสเตเตอร์และเชื่อมต่อตัวนำไฟฟ้าเข้าด้วยกันเรียกว่าส่วนหน้าของขดลวด ส่วนที่เป็นเส้นตรงของขดลวดของขดลวดที่วางอยู่ในร่องเรียกว่าด้านข้างของขดลวดหรือส่วนร่อง
ร่องของสเตเตอร์ซึ่งพอดีกับขดลวดทำให้เกิดฟันที่เรียกว่าด้านในของสเตเตอร์ ระยะห่างระหว่างจุดศูนย์กลางของฟันสองซี่ที่อยู่ติดกันของแกนสเตเตอร์ซึ่งวัดตามพื้นผิวที่หันไปทางช่องว่างอากาศเรียกว่า การแบ่งฟันหรือ การแบ่งร่อง
ขดลวดขดลวดทรงกระบอกหลายชั้น (รูปที่ 3) พันจากลวดกลมและประกอบด้วยขดลวดดิสก์หลายชั้นที่ตั้งอยู่ตามแกน ระหว่างขดลวด (ผ่านแต่ละขดลวดหรือผ่านสองหรือสามขดลวด) สามารถเว้นช่องรัศมีสำหรับระบายความร้อนได้ ขดลวดดังกล่าวใช้ด้านไฟฟ้าแรงสูงที่ ส st ≤ 335 kV×A, ฉัน st ≤ 45 A และ ยู ln ≤ 35 kV
ขดลวดทรงกระบอกชั้นเดียวและสองชั้น (รูปที่ 4) ถูกพันจากตัวนำรูปสี่เหลี่ยมผืนผ้าขนานกันหนึ่งเส้นหรือมากกว่า (มากถึงสี่) และใช้สำหรับ ส st ≤ 200 kV×A, ฉัน st ≤ 800 A และ ยู ln ≤ 6 kV
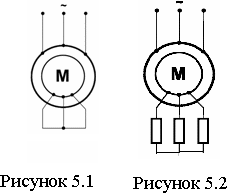
มอเตอร์กรงกระรอกแบบอะซิงโครนัส (รูปที่ 5.1) และ IM ที่มีเฟสโรเตอร์ (รูปที่ 5.2) มีการใช้กันอย่างแพร่หลายในไดรฟ์ไฟฟ้าเนื่องจากมีเวลาทำงานขนาดใหญ่ ประสิทธิภาพสูง และคุณสมบัติการควบคุมที่ดี
รูปที่ 5.3 แสดงวงจรสมมูลของมอเตอร์ไฟฟ้าหนึ่งเฟส โดยคำนึงถึงพารามิเตอร์ของวงจรแม่เหล็กที่มีแอกทีฟ r มและอุปนัย x ม แนวต้าน
ในวงจรทดแทน:
r 1 - ความต้านทานที่ใช้งานของเฟสของขดลวดสเตเตอร์
r 2 ′ - ความต้านทานเชิงแอคทีฟของเฟสของขดลวดโรเตอร์ที่นำไปยังสเตเตอร์
x 1 - ความต้านทานอุปนัยของเฟสของขดลวดสเตเตอร์
x 2 ′ - ลดลงเป็นความต้านทานอุปนัยของสเตเตอร์ของเฟสของขดลวดโรเตอร์
x ม- ความต้านทานอุปนัยของวงจรแม่เหล็ก
ตามวงจรสมมูลกระแสของโรเตอร์ ฉัน 2 ' มีความหมาย
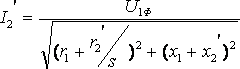
จาก (5.1) จะเป็นไปตามกระแสของโรเตอร์ ฉัน 2 ’ ขึ้นอยู่กับสลิป ส, เช่น. เกี่ยวกับความเร็วโรเตอร์ของเครื่องตั้งแต่
โปรดทราบว่าเมื่อเริ่มต้นสลิป s = 1(ค่าความเร็วปัจจุบัน w = 0)และที่ความถี่การหมุน w=w 0 การไม่ใช้งานในอุดมคติเท่ากับ s = 0. นอกจากนี้ยังตามมาจากความสัมพันธ์ที่เมื่อเริ่มต้นกระแสของโรเตอร์ถึงค่าสูงสุด ฉัน 2k ’ @ (8¸10)ฉัน ชื่อและควรจำกัด
ความถี่ปัจจุบันของโรเตอร์ ฉ พี ที่ค่าความถี่ ฉ ค แรงดันไฟหลัก ฉ พี = ฉ ค ×s,ดังนั้นเมื่อเริ่มต้น s=1และเครื่องอะซิงโครนัสสามารถแสดงด้วยหม้อแปลงแรงดันไฟฟ้าตั้งแต่ ฉ พี =f ค =50 Hz. ขณะที่เครื่องยนต์เร่งความเร็วและทำงานด้วยความลื่นเล็กน้อย ส นซึ่งไม่เกิน ส น 0,1 ; ความถี่ของกระแสโรเตอร์ก็ลดลงเช่นกัน ฉ พี = 1.5Hz.
พลัง R 1 , บริโภคโดย AD จากเครือข่าย, ถูกใช้เพื่อครอบคลุมการสูญเสียในวงจรแม่เหล็ก ∆Р มและในขดลวดสเตเตอร์ ∆Р 1 , ส่วนที่เหลือจะถูกแปลงเป็นพลังงานแม่เหล็กไฟฟ้า R อี , ซึ่งเท่ากับ
![]()
ในทางกลับกัน, , และ, การแก้โจทย์ร่วมกันและค้นหาค่าของโมเมนต์แม่เหล็กไฟฟ้า
 .
.
การพึ่งพาอาศัยกัน (5.4) เป็นคำอธิบายของลักษณะทางกลของ IM และแสดงถึงการพึ่งพาอาศัยกันของโมเมนต์ของ IM อย่างซับซ้อน เราตรวจสอบค่าสุดโต่งโดยการหาอนุพันธ์และเท่ากับศูนย์:
การพึ่งพาอาศัยกันมีค่าสูงสุดที่ค่าสลิปวิกฤตเท่ากับ
และช่วงเวลาวิกฤติ (สูงสุด)
โปรดทราบว่าเครื่องหมาย (+) หมายถึงโหมดมอเตอร์ และเครื่องหมาย (-) หมายถึงโหมดเครื่องกำเนิดไฟฟ้าของเครื่อง
สำหรับการคำนวณในทางปฏิบัติ จะสะดวกกว่าที่จะใช้สูตร Kloss ที่ได้จากนิพจน์
 , ที่ไหน .
, ที่ไหน .
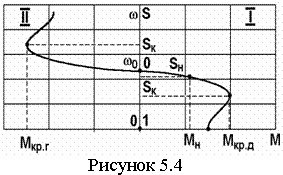
ในเครื่องอะซิงโครนัสขนาดใหญ่ r 1 << r 2 ’ , และ ε ≈0. ลักษณะทางกลของ IM มีรูปแบบดังแสดงในรูปที่ 2.4 ลักษณะเด่นของลักษณะ:
1- s=0; M=0ในขณะที่ความเร็วมอเตอร์เท่ากับซิงโครนัส
2- s=s ชื่อ , M=M ชื่อ- เล็กน้อย
โหมดการทำงานของเครื่องยนต์
3- ส = ส ถึง , M = M kr.D- แรงบิดสูงสุดในโหมดมอเตอร์
4- s = 1, M = M พี- อักษรย่อ แรงบิดเริ่มต้น;
5- s=-s ถึง , M = M kr.G- แรงบิดสูงสุดในโหมดเครื่องกำเนิดไฟฟ้า
กำลังวิเคราะห์ อิทธิพลของแรงดันไฟฟ้า ยูตามลักษณะทางกลของมอเตอร์ไฟฟ้า เรามี บนพื้นฐานของความสัมพันธ์ (5.6) และ (5.7) ว่าสลิปวิกฤต ส ถึงคงที่เมื่อแรงดันไฟฟ้าลดลงและช่วงเวลาวิกฤติ เอ็ม kr.dลดลงตามสัดส่วนของกำลังสองของแรงดันไฟฟ้า (รูปที่ 5.5)
เมื่อแรงดันไฟหลักลดลงเป็นค่า 0.9×U ชื่อ, เช่น. ลด 10% ยู ชื่อ, ช่วงเวลาวิกฤติ เอ็ม kr.dลดลง 19% ด้วยแรงดันไฟฟ้าที่ลดลง เพื่อที่จะพัฒนาค่าแรงบิดก่อนหน้านี้ มอเตอร์จะต้องทำงานด้วยกระแสโรเตอร์ขนาดใหญ่ 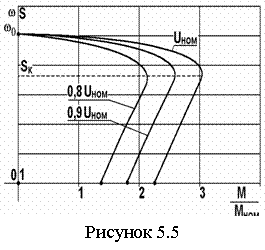
เมื่อออกแบบมอเตอร์ไฟฟ้า ตรวจสอบให้แน่ใจว่าค่าเริ่มต้น ( s = 1) และช่วงเวลาวิกฤติ ( ส = ส ถึง) ที่แรงดันไฟฟ้าต่ำสุดที่ทำได้ตรงตามข้อกำหนดของเครื่องทำงาน
กำลังวิเคราะห์ อิทธิพลของการต่อต้านเชิงรุกนำเข้าสู่วงจรโรเตอร์ตามความสัมพันธ์ (5.5) - (5.6) ซึ่งเพิ่มขึ้นในโรเตอร์ 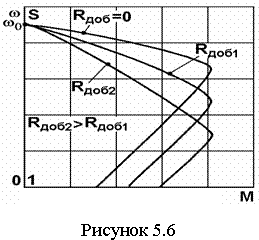
แนวต้านซึ่งเท่ากับ ( r 2 ’ + R ต่อ) สลิปคริติคอลเพิ่มขึ้น ส ถึงแต่คุณค่าของช่วงเวลาวิกฤตของเครื่องยนต์ เอ็ม kr.dยังคงไม่เปลี่ยนแปลง
ลักษณะทางกลแสดงในรูปที่ 12 วิธีการนี้ใช้เพื่อสตาร์ทเครื่องเมื่อรวมค่าที่มีนัยสำคัญไว้ในวงจรโรเตอร์ในช่วงเวลาที่สตาร์ท R ต่อ . ไดอะแกรมเริ่มต้นคล้ายกับไดอะแกรมของมอเตอร์กระแสตรงที่กระตุ้นอย่างอิสระ เพื่อคำนวณลักษณะทางกลเทียมเมื่อแนะนำความต้านทาน R ต่ออัตราส่วนที่ใช้ในโซ่โรตารี่
![]()
ที่ไหน ส และและ ส อี- เลื่อนตามลำดับในลักษณะเทียมและธรรมชาติ
รู้ความใหญ่โต R ต่อนำเข้าสู่วงจรโรเตอร์สำหรับค่าเดียวกันของช่วงเวลาตามความสัมพันธ์ (5.8) สลิปจะถูกคำนวณ ส และ เกี่ยวกับลักษณะเทียม
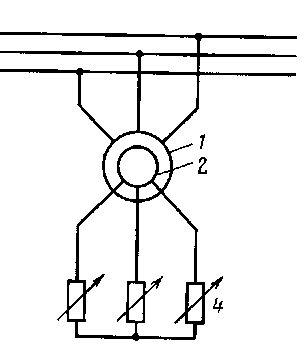
การแนะนำความต้านทานแบบแอคทีฟ - อุปนัยในวงจรโรเตอร์ของเครื่อง (รูปที่ 14) ใช้เพื่อรักษาแรงบิดเริ่มต้นของเครื่องให้คงที่มากขึ้นเมื่อเทียบกับลักษณะทางธรรมชาติของเครื่อง - ลักษณะทางกลของเครื่องในสลิป พื้นที่ 1
ช่วงเวลาสำคัญของเครื่อง เอ็ม kr.dและสลิปวิกฤต ส ถึง
เครื่องเปลี่ยนตามอัตราส่วน การแนะนำความต้านทานแบบแอคทีฟและอุปนัยในวงจรสเตเตอร์ของเครื่อง (รูป) ใช้เพื่อลดกระแสไฟเข้าของเครื่อง เนื่องจากแรงดันไฟฟ้าโดยตรงที่ขั้วสเตเตอร์จะกลายเป็นฟังก์ชันของกระแสและเมื่อกระแสเริ่มต้นลดลง (การเร่งความเร็ว ) แรงดันไฟที่ระบุจะเติบโตและกลับคืนสู่ค่าที่ใกล้เคียงกับ ยู ชื่อ .
เอาต์พุตของความต้านทานแอคทีฟและอุปนัยจากวงจรสเตเตอร์ของเครื่องจะดำเนินการโดยรีเลย์ - คอนแทคหรือวงจรที่ไม่สัมผัส 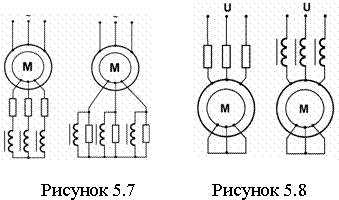
มอเตอร์แบบอะซิงโครนัส (IM) เป็นมอเตอร์ประเภทที่พบมากที่สุดเพราะ ใช้งานง่ายกว่าและเชื่อถือได้มากกว่า ด้วยกำลังที่เท่ากัน จึงมีน้ำหนัก ขนาด และต้นทุนน้อยกว่าเมื่อเปรียบเทียบกับ DPT แผนภาพสำหรับการเปิดความดันโลหิตแสดงในรูปที่ 2.14.
จนกระทั่งเมื่อไม่นานมานี้ IM ที่มีโรเตอร์แบบกรงกระรอกถูกใช้ในไดรฟ์ไฟฟ้าที่ไม่ได้รับการควบคุม อย่างไรก็ตาม เมื่อมีการกำเนิดของตัวแปลงความถี่ไทริสเตอร์ (TFC) ของแรงดันไฟฟ้าที่จ่ายให้กับขดลวดสเตเตอร์ของ IM มอเตอร์แบบกรงกระรอกก็เริ่มถูกนำมาใช้ในไดรฟ์ไฟฟ้าแบบควบคุม ปัจจุบันมีการใช้ทรานซิสเตอร์กำลังและตัวควบคุมแบบตั้งโปรแกรมได้ในตัวแปลงความถี่ วิธีการควบคุมความเร็วเรียกว่าพัลส์และการปรับปรุงเป็นทิศทางที่สำคัญที่สุดในการพัฒนาไดรฟ์ไฟฟ้า
ข้าว. 2.14. ก) วงจรสวิตชิ่ง IM พร้อมโรเตอร์กรงกระรอก
b) วงจรสวิตชิ่ง IM พร้อมเฟสโรเตอร์
สมการสำหรับคุณสมบัติทางกลของ IM สามารถหาได้จากวงจรสมมูลของ IM หากเราละเลยความต้านทานเชิงแอ็คทีฟของสเตเตอร์ในวงจรนี้ นิพจน์สำหรับลักษณะทางกลจะมีลักษณะดังนี้:
![]() ,
,
ที่นี่ ม ถึง -ช่วงเวลาวิกฤติ; S ถึง- ใบสำคัญที่สอดคล้องกับมัน; คุณ f- ค่าที่มีประสิทธิภาพของแรงดันเฟสของเครือข่าย ω 0 =2πf/pคือความเร็วเชิงมุมของสนามแม่เหล็กหมุนของ IM (ความเร็วซิงโครนัส); ฉ– ความถี่ของแรงดันไฟจ่าย พี- จำนวนคู่ของความดันโลหิต; x k- ความต้านทานเฟสอุปนัยของการลัดวงจร (กำหนดจากวงจรสมมูล) S \u003d (ω 0 -ω) / ω 0- สลิป (ความเร็วของโรเตอร์สัมพันธ์กับความเร็วของสนามหมุน) R21คือ ค่าความต้านทานรวมของเฟสโรเตอร์
ลักษณะทางกลของ IM กับโรเตอร์กรงกระรอกแสดงในรูปที่ 2.15.
ข้าว. 2.15. ลักษณะทางกลของ IM กับโรเตอร์กรงกระรอก
สามารถแยกแยะลักษณะเด่นได้สามจุด พิกัดของจุดแรก ( ส=0; ω=ω 0 ; M=0). มันสอดคล้องกับโหมดรอบเดินเบาในอุดมคติเมื่อความเร็วของโรเตอร์เท่ากับความเร็วของสนามแม่เหล็กหมุน พิกัดของจุดที่สอง ( S=S ถึง; M=M ถึง). เครื่องยนต์ทำงานด้วยแรงบิดสูงสุด ที่ M c > M kโรเตอร์ของมอเตอร์จะถูกบังคับให้หยุด ซึ่งเป็นโหมดไฟฟ้าลัดวงจรสำหรับมอเตอร์ ดังนั้นแรงบิดของเครื่องยนต์ ณ จุดนี้จึงเรียกว่าวิกฤติ M ถึง. พิกัดจุดที่สาม ( ส=1; ω=0; M=M p). ณ จุดนี้ เครื่องยนต์ทำงานในโหมดสตาร์ท: ความเร็วของโรเตอร์ ω=0 และแรงบิดเริ่มต้นจะกระทำกับโรเตอร์ที่อยู่กับที่ เอ็มพี. ส่วนของคุณสมบัติทางกลที่อยู่ระหว่างจุดคุณลักษณะที่หนึ่งและที่สองเรียกว่าส่วนการทำงาน เครื่องยนต์ทำงานอยู่ในสถานะคงที่ สำหรับ IM กับโรเตอร์กรงกระรอกภายใต้เงื่อนไข U=U นและ f=f นลักษณะทางกลเรียกว่าธรรมชาติ ในกรณีนี้ในส่วนการทำงานของคุณลักษณะจะมีจุดที่สอดคล้องกับโหมดการทำงานเล็กน้อยของเครื่องยนต์และมีพิกัด ( ส น; ω n; ม น).
ลักษณะทางไฟฟ้าของความดันโลหิต ω=f(ฉันฉ)ซึ่งในรูปที่ 2.15 แสดงด้วยเส้นประซึ่งตรงกันข้ามกับคุณลักษณะทางไฟฟ้าของ DPT ซึ่งตรงกับลักษณะทางกลเฉพาะในพื้นที่ทำงานเท่านั้น นี่เป็นเพราะความจริงที่ว่าในระหว่างการเริ่มต้นเนื่องจากความถี่ที่เปลี่ยนแปลงของแรงเคลื่อนไฟฟ้า ในขดลวดโรเตอร์ อี2ความถี่ปัจจุบันและอัตราส่วนของความต้านทานอุปนัยและแอคทีฟของการเปลี่ยนแปลงของขดลวด: ที่จุดเริ่มต้นของการเริ่มต้น ความถี่ปัจจุบันมีขนาดใหญ่และความต้านทานอุปนัยมากกว่าแอคทีฟ ด้วยการเพิ่มความเร็วของโรเตอร์ ω ความถี่ของกระแสโรเตอร์และด้วยเหตุนี้ความต้านทานอุปนัยของขดลวดจึงลดลง ดังนั้นกระแสเริ่มต้นของ IM ในโหมดเริ่มต้นโดยตรงจะสูงกว่าค่าเล็กน้อย 5-7 เท่า ฉันฟินและแรงบิดเริ่มต้น เอ็มพีเท่ากับนาม ม น. ต่างจาก DCT ซึ่งเมื่อสตาร์ทเครื่องจำเป็นต้องจำกัดกระแสสตาร์ทและแรงบิดเริ่มต้น เมื่อสตาร์ท IM กระแสเริ่มต้นจะต้องถูกจำกัด และต้องเพิ่มแรงบิดเริ่มต้น สถานการณ์สุดท้ายสำคัญที่สุด เนื่องจาก DPT ที่มีการกระตุ้นอิสระเริ่มต้นที่ นางสาว<2,5М н , DCT พร้อมการกระตุ้นตามลำดับที่ นางสาว<5М н และความดันโลหิตเมื่อทำงานในลักษณะธรรมชาติที่ นางสาว<М н .
สำหรับ IM ที่มีโรเตอร์กรงกระรอก การเพิ่มขึ้น เอ็มพีโดยการออกแบบพิเศษของขดลวดโรเตอร์ ร่องสำหรับการหมุนของโรเตอร์นั้นลึกและตัวม้วนนั้นถูกวางในสองชั้น เมื่อสตาร์ทเครื่องยนต์ความถี่ อี2และกระแสของโรเตอร์มีขนาดใหญ่ซึ่งนำไปสู่การปรากฏตัวของเอฟเฟกต์การกระจัดปัจจุบัน - กระแสจะไหลเฉพาะในชั้นบนของขดลวดเท่านั้น ดังนั้นความต้านทานของขดลวดและแรงบิดเริ่มต้นของมอเตอร์จึงเพิ่มขึ้น เอ็ม พี. มูลค่าของมันสามารถเข้าถึงได้ 1.5M n.
สำหรับ IM ที่มีเฟสโรเตอร์ เพิ่มขึ้น เอ็ม พีให้โดยการเปลี่ยนลักษณะทางกล ถ้าต่อต้าน อาร์ พีรวมอยู่ในวงจรกระแสของโรเตอร์มีค่าเท่ากับศูนย์ - เครื่องยนต์ทำงานในลักษณะที่เป็นธรรมชาติและ M P \u003d M N. ที่ อาร์ พี >0ความต้านทานรวมของเฟสโรเตอร์เพิ่มขึ้น R21. คริติคอลสลิป S ถึงในขณะที่คุณเพิ่มขึ้น R21ยังเพิ่มขึ้น เป็นผลให้สำหรับ IM ที่มีเฟสโรเตอร์ บทนำ อาร์ พีเข้าไปในวงจรการไหลของกระแสของโรเตอร์ทำให้เกิดการกระจัด เอ็ม เคในทิศทางของใบขนาดใหญ่ ที่ S K \u003d 1 M P \u003d M K.ลักษณะทางกลของ IM ที่มีเฟสโรเตอร์ที่ อาร์ พี >0เรียกว่าเทียมหรือลิโน่ พวกเขาจะแสดงในรูปที่ 2.16.
ข้าว. 2.16. ลักษณะทางกลของ IM ที่มีเฟสโรเตอร์
มอเตอร์เหนี่ยวนำกรงกระรอกจะเริ่มเมื่อ M p > M sและจะทำงานที่จุด A (ดูรูปที่ 2.15) หลังจากช่วงเวลาแห่งการต่อต้านนี้ นางสาวสามารถเพิ่มเป็น เอ็ม เค. HELL เช่นเดียวกับมอเตอร์กระแสตรงที่มีการเพิ่มขึ้น นางสาวจะลดความเร็วลงโดยอัตโนมัติโดยไม่มีการแทรกแซงจากภายนอก ω และเพิ่มแรงบิด เอ็มจนกระทั่ง เอ็มและ นางสาวมีขนาดไม่เท่ากัน กล่าวคือ จากสภาวะคงตัวที่ความเร็วสูงกว่าเป็นสภาวะคงที่ด้วยความเร็วที่ช้ากว่า เมื่อลดลง นางสาวตรงกันข้ามจะถูกสังเกต - เครื่องยนต์จะเปลี่ยนจากสถานะคงตัวที่ความเร็วต่ำลงเป็นสถานะคงที่ที่ความเร็วสูงกว่าโดยอัตโนมัติ ส่วนการทำงานของลักษณะทางกลของ IM นั้นคล้ายกับลักษณะทางกลของ DPT ที่มีการกระตุ้นอิสระ - เป็นเส้นตรงที่เอียงไปที่แกน abscissa
AD มีคุณสมบัติดังกล่าวเนื่องจากแรงเคลื่อนไฟฟ้า อี2ซึ่งเกิดจากสนามแม่เหล็กหมุนของสเตเตอร์ในขดลวดของโรเตอร์ ที่ M c > Mช่วงเวลาไดนามิก M d<0 และความเร็วของโรเตอร์ ω ลดลง สนามแม่เหล็กสเตเตอร์หมุนด้วยความเร็วคงที่ ω 0 (ความเร็วซิงโครนัส) จะข้ามขดลวดของโรเตอร์ที่ความถี่สูง ดังนั้นจะเพิ่มขึ้น อี2, กระแสในโรเตอร์โรเตอร์, แรงแอมแปร์ที่กระทำต่อการหมุนของมัน, และด้วยเหตุนี้แรงบิด เอ็ม.
ความจุเกินพิกัดของ IM โดยช่วงเวลานั้นถูกกำหนดโดยอัตราส่วนของช่วงเวลาวิกฤติ เอ็ม เคตามเวลาที่กำหนด เอ็ม นู๋. สำหรับ IM ทั่วไปที่มีโรเตอร์กรงกระรอก M K / M N \u003d 1.7, พร้อมเฟสโรเตอร์ M K / M N \u003d 1.8. สำหรับ IM ของเครนแบบพิเศษที่มีโรเตอร์แบบกรงกระรอกของประเภท MTK และเฟสโรเตอร์ของประเภท MTKF อัตราส่วน M K / M N \u003d 2.3 ÷ 3.4.
อันเป็นผลมาจากการทำงานร่วมกันของสนามแม่เหล็กกับกระแสในโรเตอร์ของมอเตอร์เหนี่ยวนำทำให้เกิดโมเมนต์แม่เหล็กไฟฟ้าที่หมุนได้ซึ่งมีแนวโน้มที่จะทำให้ความเร็วของการหมุนของสนามแม่เหล็กของสเตเตอร์และโรเตอร์เท่ากัน
ความแตกต่างระหว่างความเร็วการหมุนของสนามแม่เหล็กของสเตเตอร์และโรเตอร์ มอเตอร์เหนี่ยวนำลักษณะ ค่าสลิป s = (n1 - n2 ) / n2 โดยที่ n1 - ความเร็วในการหมุนสนามซิงโครนัส, รอบต่อนาที, n2- ความเร็วในการหมุนของโรเตอร์ของมอเตอร์แบบอะซิงโครนัส rpmเมื่อทำงานกับโหลดที่กำหนด สลิปมักจะมีขนาดเล็ก ดังนั้นสำหรับมอเตอร์ไฟฟ้า เช่น n1 = 1500 rpm, n2 = 1460 rpm สลิปคือ: s = ((1500 - 1460) / 1500) x 100 = 2, 7%
ไม่สามารถเข้าถึงกลไกที่ตัดการเชื่อมต่อได้สามกลไก เนื่องจากตัวนำของโรเตอร์จะไม่ถูกสนามแม่เหล็กตัดผ่าน จะไม่มี EMF เกิดขึ้นและจะไม่มีกระแสไฟฟ้าเกิดขึ้น โมเมนต์อะซิงโครนัสที่ s = 0 จะเท่ากับศูนย์
ในช่วงเริ่มต้นของการเริ่มต้น กระแสจะไหลในขดลวดของโรเตอร์ด้วยความถี่ไฟหลัก เมื่อโรเตอร์เร่งความเร็ว ความถี่ของกระแสในนั้นจะถูกกำหนด เลื่อน มอเตอร์เหนี่ยวนำ: f2 = s x f1 โดยที่ f1 คือความถี่ของกระแสที่จ่ายให้กับสเตเตอร์
ความต้านทานของโรเตอร์ขึ้นอยู่กับความถี่ของกระแสในนั้น และยิ่งความถี่สูง ความต้านทานอุปนัยก็จะยิ่งมากขึ้น ด้วยการเพิ่มความต้านทานอุปนัยของโรเตอร์ การเลื่อนเฟสระหว่างแรงดันและกระแสในขดลวดสเตเตอร์จะเพิ่มขึ้น
เมื่อสตาร์ทมอเตอร์เหนี่ยวนำ ตัวประกอบกำลังจึงต่ำกว่าระหว่างการทำงานปกติอย่างมาก มูลค่าปัจจุบันถูกกำหนด ค่าความต้านทานมอเตอร์เทียบเท่าและแรงดันไฟฟ้าที่ใช้
ค่าความต้านทานเทียบเท่าของมอเตอร์เหนี่ยวนำที่มีการเปลี่ยนแปลงของสลิปเปลี่ยนแปลงตามกฎที่ซับซ้อน เมื่อสลิปลดลงภายใน 1 - 0.15 แนวต้านจะเพิ่มขึ้นไม่เกิน 1.5 เท่าในช่วง 0.15 ถึง sn om 5-7 เท่าเมื่อเทียบกับค่าเริ่มต้นเมื่อเริ่มต้น
การเปลี่ยนแปลงของขนาดในปัจจุบันแปรผกผันกับการเปลี่ยนแปลงของความต้านทานเทียบเท่า ดังนั้น เมื่อเริ่มต้นจนถึงการลื่นที่ประมาณ 0.15 กระแสจะลดลงเล็กน้อยแล้วจึงลดลงอย่างรวดเร็ว
แรงบิดของมอเตอร์ถูกกำหนดโดยขนาดของฟลักซ์แม่เหล็ก กระแสและการเปลี่ยนแปลงเชิงมุมระหว่าง EMF และกระแสในโรเตอร์ ในทางกลับกัน ปริมาณเหล่านี้ขึ้นอยู่กับสลิป ดังนั้น เพื่อศึกษาประสิทธิภาพของมอเตอร์แบบอะซิงโครนัส การพึ่งพาแรงบิดบนสลิป และอิทธิพลของแรงดันไฟและความถี่ที่จ่ายให้
แรงบิดยังสามารถกำหนดได้จากกำลังแม่เหล็กไฟฟ้าบนเพลาตามอัตราส่วนของกำลังนี้ต่อความเร็วเชิงมุมของโรเตอร์ ปริมาณของแรงบิดเป็นสัดส่วนกับกำลังสองของแรงดันและแปรผกผันกับกำลังสองของความถี่
ค่าลักษณะของโมเมนต์ขึ้นอยู่กับสลิป (หรือความเร็ว) คือ ค่าแรงบิดเริ่มต้น(เมื่อมอเตอร์อยู่กับที่) ค่าแรงบิดสูงสุด(และสลิปที่สอดคล้องกันเรียกว่าวิกฤต) และ ค่าต่ำสุดของโมเมนต์ในการจำกัดความเร็วจากสถานะนิ่งถึงค่าเล็กน้อย.
ค่าแรงบิดสำหรับแรงดันไฟฟ้าจะได้รับในแคตตาล็อกสำหรับเครื่องจักรไฟฟ้า ความรู้เกี่ยวกับแรงบิดขั้นต่ำนั้นจำเป็นในการคำนวณการยอมรับของการสตาร์ทหรือสตาร์ทกลไกเองด้วยกลไกที่โหลดเต็มที่ ดังนั้นค่าของมันสำหรับการคำนวณเฉพาะจะต้องถูกกำหนดหรือได้รับจากโรงงานที่จัดหา
ขนาดของค่าแรงบิดสูงสุดถูกกำหนดโดยความต้านทานการรั่วไหลอุปนัยของสเตเตอร์และโรเตอร์ และไม่ขึ้นอยู่กับขนาดของความต้านทานของโรเตอร์
คริติคอลสลิปถูกกำหนดโดยอัตราส่วนของความต้านทานของโรเตอร์ต่อความต้านทานที่เท่ากัน (เนื่องจากความต้านทานเชิงแอ็คทีฟของสเตเตอร์และความต้านทานการรั่วไหลแบบเหนี่ยวนำของสเตเตอร์และโรเตอร์)
การเพิ่มเฉพาะความต้านทานเชิงรุกของโรเตอร์จะมาพร้อมกับการเพิ่มขึ้นของสลิปวิกฤตและการเปลี่ยนแรงบิดสูงสุดไปยังบริเวณที่สลิปที่สูงขึ้น (ความเร็วการหมุนที่ต่ำกว่า) ด้วยวิธีนี้ การเปลี่ยนแปลงในลักษณะของช่วงเวลาต่างๆ สามารถทำได้
การเปลี่ยนสลิปทำได้โดยการเพิ่มความต้านทานของโรเตอร์หรือการไหล ตัวเลือกแรกเป็นไปได้เฉพาะสำหรับมอเตอร์แบบอะซิงโครนัสที่มีเฟสโรเตอร์ (จาก S = 1 ถึง S = Snom) แต่ไม่ประหยัด ตัวเลือกที่สองเป็นไปได้เมื่อแรงดันไฟฟ้าเปลี่ยนแปลง แต่ไปในทิศทางที่ลดลงเท่านั้น ช่วงการควบคุมมีขนาดเล็ก เนื่องจาก S เพิ่มขึ้น แต่ในขณะเดียวกัน ความจุเกินของมอเตอร์แบบอะซิงโครนัสก็ลดลง ในแง่ของประสิทธิภาพ ทั้งสองตัวเลือกมีค่าเท่ากันโดยประมาณ
การเปลี่ยนแปลงของแรงบิดที่สลิปต่างๆ จะดำเนินการโดยใช้ความต้านทานที่ป้อนเข้าไปในวงจรขดลวดของโรเตอร์ ที่ มอเตอร์แบบอะซิงโครนัสด้วยโรเตอร์กรงกระรอก การเปลี่ยนแปลงของแรงบิดสามารถทำได้โดยการใช้มอเตอร์ที่มีพารามิเตอร์แปรผันหรือการใช้งาน
ทางเลือกที่เหมาะสมของมอเตอร์ไฟฟ้าสำหรับกลไกการผลิตคือกุญแจสู่การทำงานปกติและประหยัด หากเลือกมอเตอร์ไฟฟ้าอย่างถูกต้อง จะทำให้ระบบควบคุมของไดรฟ์ไฟฟ้าง่ายขึ้นและอาจลดต้นทุนของไดรฟ์ไฟฟ้า ดังที่คุณทราบ ระบบขับเคลื่อนไฟฟ้าจะต้องไม่เพียงแค่ให้ค่าคงที่ของค่าคงที่ (ความเร็ว แรงบิด) แต่ยังรวมถึงค่าไดนามิกด้วย (กระบวนการชั่วคราว เช่น อัตราเร่ง แรงบิดเบรก แรงบิดเริ่มต้น ฯลฯ)
เกณฑ์หลักสำหรับการเลือกมอเตอร์ไฟฟ้าคือการพึ่งพาซึ่งแสดงค่าของโมเมนต์ M ของมอเตอร์ไฟฟ้าและความเร็วของการหมุนของเพลา n ภายใต้การกระทำของช่วงเวลานี้ การพึ่งพาอาศัยกันนี้เรียกว่าลักษณะทางกล n=f(M) ตามลักษณะทางกลจะทำการวิเคราะห์คุณสมบัติทางไฟฟ้าของเครื่องยนต์และประเมินความเหมาะสมในการใช้งานสำหรับกลไกและอุปกรณ์ประเภทต่างๆ พวกเขาสามารถเป็นสองประเภท: ธรรมชาติและประดิษฐ์
ลักษณะทางกลตามธรรมชาติ: จะถูกลบออกเมื่อพารามิเตอร์เล็กน้อยมีอิทธิพลต่อมอเตอร์ (พิกัดกระแส ความต้านทานของขดลวด แรงดัน โมเมนต์ความต้านทาน ฯลฯ) นั่นคือมอเตอร์เชื่อมต่อกับแหล่งพลังงานโดยไม่มีอุปกรณ์แปลงสัญญาณ - การเชื่อมต่อโดยตรง
ลักษณะทางกลประดิษฐ์: จะถูกลบออกเมื่อมีการนำองค์ประกอบเพิ่มเติมเข้าไปในวงจรมอเตอร์ (ตัวต้านทานเพิ่มเติม) หรือที่แรงดันไฟจ่ายที่ลดลง ความถี่ (ถ้ามอเตอร์เป็นแรงดันไฟฟ้าสลับ) ฯลฯ นั่นคือลักษณะทางกลของเครื่องยนต์ได้รับผลกระทบเทียม
ลักษณะทางกลยังแตกต่างด้วยการเปลี่ยนความเร็วในการหมุนของเพลาขึ้นอยู่กับแรงบิดที่เพิ่มขึ้น พวกเขาได้รับการจัดอันดับสำหรับความแข็ง
และความชันของความชัน:
เพื่อตรวจสอบความแข็งแกร่งของคุณสมบัติทางกล จำเป็นต้องทราบการเปลี่ยนแปลงของความเร็วและแรงบิดในส่วนที่กำหนดของการพึ่งพา n=f(M) ดังนั้น การคำนวณความแข็งทั้งหมดจะดำเนินการเป็นเปอร์เซ็นต์หรือในหน่วยสัมพัทธ์
นอกจากนี้ ลักษณะทางกลสามารถจำแนกออกเป็นกลุ่มๆ ได้ดังนี้
- แข็ง - เมื่อความเร็วลดลงเล็กน้อยพร้อมแรงบิดโหลดที่เพิ่มขึ้น ตัวอย่างเช่น มอเตอร์กระแสตรงของ DCT NV การกระตุ้นอิสระหรือส่วนเชิงเส้นของคุณลักษณะของมอเตอร์เหนี่ยวนำ
- นุ่ม - ด้วยแรงบิดโหลดที่เพิ่มขึ้น การเปลี่ยนแปลงของความเร็วในการหมุนจึงค่อนข้างสำคัญ ซึ่งรวมถึงมอเตอร์กระแสตรงของชุดกระตุ้น DPT PV
ด้านล่างเป็นกราฟแสดงคุณสมบัติทางกลต่างๆ ของมอเตอร์ไฟฟ้า:
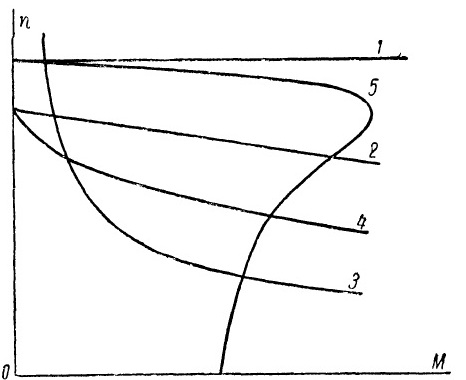
- เป็นเครื่องซิงโครนัสที่เข้มงวดอย่างยิ่ง
- – DPT NV . แบบแข็ง
- - DPT PV . อ่อน
- – DPT อ่อนของการกระตุ้นแบบผสม
- – มอเตอร์แบบอะซิงโครนัส
การเลือกมอเตอร์ไฟฟ้าขึ้นอยู่กับข้อกำหนดของกลไกการผลิต ในอุตสาหกรรมต่างๆ เช่น โลหะกลิ้ง การทำกระดาษหรือกระดาษแข็ง จำเป็นต้องมีการบำรุงรักษาความเร็วคงที่อย่างแม่นยำ และกลไกต่างๆ เช่น การยกและการขนส่ง ไม่ต้องการคุณลักษณะที่เข้มงวด (DPT PV ใช้ในไดรฟ์ไฟฟ้าแบบลากจูง และยังใช้ใน กลไกเครนบางอย่าง)