ทุกวันนี้ มอเตอร์เหนี่ยวนำเป็นผู้ใช้ไฟฟ้าที่พบมากที่สุดในโลกและถูกใช้ทุกที่ ตั้งแต่เครื่องใช้ในครัวเรือน เช่น เครื่องดูดฝุ่น ตู้เย็น หรือพัดลม ไปจนถึงการติดตั้งในโรงงานอุตสาหกรรมขนาดใหญ่ ซึ่งกำลังของมอเตอร์ไฟฟ้าวัดเป็นเมกะวัตต์ มัน สถานีสูบน้ำ, สายพานลำเลียง, การติดตั้งการขุด, ระบบระบายอากาศหรือดูดควัน ฯลฯ จากสถิติพบว่ามีการใช้มอเตอร์ไฟฟ้าแบบอะซิงโครนัสสามเฟสที่มีแรงดันไฟฟ้า 380V ประมาณ 300 ล้านตัวในโลก
ทุกปี ประมาณ 10% ของมอเตอร์ไฟฟ้าเหล่านี้จะล้มเหลวเนื่องจากการทำงานที่ไม่เหมาะสม การโอเวอร์โหลด หรือการทำงานฉุกเฉิน ความล้มเหลวมักเกี่ยวข้องกับกระบวนการเริ่มต้น มอเตอร์แบบอะซิงโครนัสเมื่อมันจะต้องได้รับความเร็วที่กำหนดในกลไกที่มีโมเมนต์ความเฉื่อยมาก ดังนั้น โมเมนต์เริ่มต้นของมอเตอร์แบบอะซิงโครนัสคือ ระบอบการปกครองที่หนักหน่วงทำงานกับเครื่องจักรขนาดใหญ่และ โหลดไฟฟ้า. กระแสเริ่มต้นของมอเตอร์ไฟฟ้าแบบอะซิงโครนัสสามารถเกินกระแสที่กำหนดได้ 10 - 12 เท่า
ประเภทของมอเตอร์ไฟฟ้าสตาร์ทและคุณสมบัติต่างๆ
สตาร์ทมอเตอร์ไฟฟ้าแบบอะซิงโครนัสโดยตรง- นี่เป็นวิธีการสตาร์ทแบบดั้งเดิมที่สุดที่ใช้กันมาตั้งแต่การถือกำเนิดของมอเตอร์ไฟฟ้าจนถึงปัจจุบัน นี่เป็นวิธีแก้ปัญหาที่ง่ายทางเทคนิคและคุ้มค่าที่สุดที่ช่วยให้คุณสตาร์ทมอเตอร์ไฟฟ้าได้ที่ พิกัดแรงดันไฟฟ้า. ด้วยวิธีการเริ่มต้นนี้ มีการใช้ชุดอุปกรณ์สวิตชิ่งเพียงเล็กน้อย แต่ปัจจุบันใช้เป็นหลักในการสตาร์ทมอเตอร์ไฟฟ้าความจุน้อยเนื่องจากมีข้อบกพร่องจำนวนหนึ่ง ซึ่งสามารถแบ่งออกเป็น 2 ประเภทคือ ไฟฟ้าและเครื่องกล
ปัญหาไฟฟ้า:
ด้วยการเริ่มต้นโดยตรงของมอเตอร์ไฟฟ้าแบบอะซิงโครนัสทำให้เกิดกระแสไฟกระชากที่ค่อนข้างใหญ่ซึ่งนำไปสู่แรงดันไฟฟ้าตกในเครือข่ายอุปทาน และยังสามารถนำไปสู่การดำเนินการป้องกัน โดยเฉพาะอย่างยิ่งในกรณีที่ไม่ได้ใช้อุปกรณ์พิเศษเพื่อป้องกันมอเตอร์ไฟฟ้า นอกจากนี้ ในกรณีของการสตาร์ทเป็นเวลานาน กระแสไฟระยะยาวที่ไหลเกินพิกัดกระแส 6-8 เท่า มีผลกระทบทางความร้อนและอิเล็กโทรไดนามิกอย่างมีนัยสำคัญต่อทั้งสายเคเบิลที่เชื่อมต่อกับมอเตอร์ไฟฟ้าและบนขดลวดของไฟฟ้าแบบอะซิงโครนัส มอเตอร์ซึ่งนำไปสู่การสึกหรอที่เพิ่มขึ้น
ปัญหาทางกล:
แรงบิดในการสตาร์ทเริ่มต้นที่สูงอาจทำให้เกิดการกระแทกอย่างมีนัยสำคัญ ดังนั้นจึงทำให้เกิดภาระอย่างมากกับกลไกการขับเคลื่อนมอเตอร์ เช่น สายพานหรือชุดประกอบตลับลูกปืน ทำให้อายุการใช้งานสั้นลงหรือล้มเหลวโดยสิ้นเชิง ในกรณีของอุตสาหกรรมที่สำคัญโดยเฉพาะอย่างยิ่ง การหยุดทำงานของอุปกรณ์ในช่วงเวลาระหว่างการซ่อมแซมอาจนำไปสู่การสูญเสียที่สำคัญได้ เมื่อหยุดรถและสตาร์ทเครื่องจะมีการสั่นสะเทือนทางกลที่รุนแรงซึ่งเกิดจากชั่วขณะหนึ่ง ไม่อนุญาติ งานซิงโครนัสโหนดอิสระหลายโหนดในสายการผลิตหรือการติดตั้งเครื่องจักรที่ซับซ้อน
สตาร์เดลต้าเริ่มต้น, เป็นหนึ่งในวิธีที่รู้จักกันดีในการสตาร์ทมอเตอร์แบบอะซิงโครนัส วิธีนี้ใช้เพื่อลดความเครียดทางกลและจำกัดกระแสไหลเข้า แต่ก็มีข้อเสียหลายประการ ประการแรก มอเตอร์ไฟฟ้าต้องมี 6 ขั้วสำหรับต่อไฟ ประการที่สองสำหรับการเริ่มต้นตามโครงการนี้จำเป็นต้องมีคอนแทค 3 ตัวซึ่งจะเป็นการเพิ่มต้นทุนและขนาดของการติดตั้งอีกครั้ง เมื่อเปลี่ยนจากวงจรดาวไปเป็นวงจรสามเหลี่ยม กระแสไฟกระชาก แม้จะระยะสั้นแต่มีแอมพลิจูดมากก็ยังคงเกิดขึ้น ประการที่สาม ต้องใช้สายเคเบิลสองเส้นจากจุดควบคุมไปยังมอเตอร์ไฟฟ้า ซึ่งค่อนข้างแพงในกรณีของสายยาว และข้อเสียประการสุดท้ายคือการหยุดมอเตอร์ด้วยรูปแบบการเชื่อมต่อที่เหมือนกันทุกประการกับการสตาร์ทโดยตรง
วิธีที่สามในการเริ่มต้น การใช้ซอฟต์สตาร์ทเตอร์.
ซอฟต์สตาร์ทเตอร์เป็นอุปกรณ์เชิงกล อิเล็กทรอนิกส์ หรือเครื่องกลไฟฟ้าที่ใช้ในการสตาร์ทหรือหยุดมอเตอร์ไฟฟ้าอย่างนุ่มนวล ด้วยการใช้ซอฟต์สตาร์ทเตอร์ ทำให้สามารถเร่งความเร็วและหยุดมอเตอร์ไฟฟ้าแบบอะซิงโครนัสได้พร้อมๆ กันเพื่อให้มั่นใจถึงเสถียรภาพที่ดีขึ้น เครือข่ายไฟฟ้ากล่าวคือ เพื่อลดกระแสไฟกระชากระหว่างการสตาร์ทเครื่อง และลดแรงดันไฟตกในเครือข่ายลงอย่างมากในระหว่างการสตาร์ทอัพที่ยากลำบาก นอกจากนี้ การใช้ระบบซอฟต์สตาร์ทยังช่วยลดภาระทางกลของอุปกรณ์ระหว่างการสตาร์ทและปิดเครื่อง ลดการสึกหรอของกลไก และเพิ่มอายุการใช้งานของมอเตอร์ไฟฟ้าแบบอะซิงโครนัส กระปุกเกียร์ ข้อต่อ และส่วนขับเคลื่อนอื่นๆ ดังนั้นทางออกที่เหมาะสมที่สุดในแง่ของอัตราส่วนของการทำงาน - ค่าใช้จ่ายในการสตาร์ทมอเตอร์ไฟฟ้าแบบอะซิงโครนัสหากไม่ต้องการการควบคุมความเร็วคงที่คือสตาร์ทแบบอ่อน
การเลือกตัวแปลงความถี่
เมื่อกำหนดลักษณะของตัวแปลงความถี่สำหรับโหลดที่กำหนด ขั้นตอนแรกคือการพิจารณาลักษณะโหลด มีสี่วิธีในการคำนวณพารามิเตอร์เอาท์พุตที่ต้องการ โดยเลือกวิธีการขึ้นอยู่กับลักษณะของมอเตอร์
ลักษณะการบรรทุก
ก่อนกำหนดขนาดตัวแปลงความถี่ จะต้องแยกความแตกต่างระหว่างพิกัดโหลดที่ใช้บ่อยที่สุดสองแบบ ลักษณะการบรรทุกต่างกันดังนี้
ข้าว. 1. โมเมนต์โหลดคงที่และกำลังสอง
เมื่อความเร็วของปั๊มหอยโข่งและพัดลมเพิ่มขึ้น การสิ้นเปลืองพลังงานจะเพิ่มขึ้นเป็นกำลังที่สาม (P = n 3)
ช่วงการทำงานปกติของปั๊มหอยโข่งและพัดลมอยู่ระหว่าง 50% ถึง 90% ปัจจัยโหลดเพิ่มขึ้นตามกำลังสองของความเร็ว นั่นคือ ประมาณ 30 ถึง 80%
ปัจจัยทั้งสองนี้แสดงให้เห็นในลักษณะแรงบิดของมอเตอร์ที่ควบคุมโดยเครื่องแปลงความถี่
รูปที่ 2 และ 3 แสดงลักษณะแรงบิดของตัวแปลงความถี่สองขนาด โดยตัวหนึ่ง (รูปที่ 3) มีช่วงกำลังที่เล็กกว่าอีกตัวหนึ่ง ลักษณะแรงบิดทั้งสองแบบให้ลักษณะโหลดที่เหมือนกันของปั๊มแบบแรงเหวี่ยง
ในรูป 2 ช่วงการทำงานทั้งหมดของปั๊ม (0-100%) อยู่ภายในค่าเล็กน้อยของพารามิเตอร์มอเตอร์ เนื่องจากช่วงการทำงานปกติของปั๊มอยู่ระหว่าง 30% ถึง 80% จึงสามารถเลือกใช้ตัวแปลงความถี่ที่มีกำลังขับต่ำกว่าได้

ข้าว. 2. เครื่องแปลงความถี่กำลังสูง
ข้าว. 3. ตัวแปลงความถี่พลังงานต่ำ
หากแรงบิดของโหลดคงที่ มอเตอร์จะต้องสามารถส่งแรงบิดได้มากกว่าแรงบิดโหลด เนื่องจากแรงบิดส่วนเกินจะใช้สำหรับการเร่งความเร็ว
สำหรับการเร่งความเร็วและแรงบิดเริ่มต้นสูง เช่น ในกรณีของตัวขับสายพานลำเลียง แรงบิดเกินพิกัดระยะสั้น 60% ของแรงบิดที่พัฒนาโดยเครื่องแปลงความถี่ก็เพียงพอแล้ว แรงบิดโอเวอร์โหลดยังช่วยให้ระบบสามารถรองรับโหลดที่เพิ่มขึ้นอย่างกะทันหัน ต้องเลือกตัวแปลงความถี่ที่ไม่อนุญาตให้มีแรงบิดเกินพิกัด เพื่อให้แรงบิดเร่ง (T B) อยู่ในแรงบิดที่กำหนด
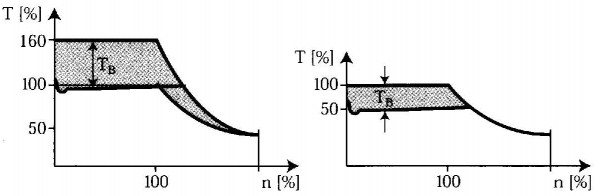
ข้าว. 4. ใช้แรงบิดเกินสำหรับการเร่งความเร็ว
เมื่อกำหนดลักษณะโหลด จะพิจารณาชุดที่แตกต่างกันสี่ชุด ข้อมูลจำเพาะมอเตอร์ ช่วยให้คุณตัดสินใจเกี่ยวกับการเลือกขนาดของตัวแปลงความถี่ในแง่ของกำลังไฟฟ้า
1. สามารถเลือกตัวแปลงความถี่ได้อย่างรวดเร็วและแม่นยำตามค่ากระแส l M ที่มอเตอร์ดึงออกมา หากมอเตอร์ทำงานไม่เต็มแรง สามารถวัดกระแสได้ด้วยระบบที่คล้ายคลึงกันซึ่งทำงานเต็มกำลัง

ข้าว. 5.
มอเตอร์ไฟฟ้า 7.5 กิโลวัตต์ 3 x 400 V ใช้กระแสไฟ 14.73 A.
สำหรับข้อมูลทางเทคนิคของตัวแปลงความถี่ ตัวแปลงความถี่จะถูกเลือกซึ่งมีกระแสเอาต์พุตสูงสุดอย่างต่อเนื่องมากกว่าหรือเท่ากับ 14.73A โดยมีลักษณะแรงบิดคงที่หรือกำลังสอง
บันทึก:
หากเลือกตัวแปลงความถี่ตามกำลัง (วิธีที่ 2-4) จำเป็นต้องเปรียบเทียบกำลังที่คำนวณได้และกำลังไฟฟ้าที่ระบุในข้อมูลทางเทคนิคของตัวแปลงความถี่ที่แรงดันไฟฟ้าเท่ากัน หากตัวแปลงความถี่คำนวณจากกระแส (วิธีที่ 1) ไม่จำเป็น เนื่องจากกระแสเอาต์พุตของตัวแปลงความถี่จะส่งผลต่อข้อมูลอื่นๆ
2. สามารถเลือกตัวแปลงความถี่ตาม พลังงานเต็ม S M ถูกใช้โดยมอเตอร์ไฟฟ้าและกำลังไฟฟ้าที่มาจากเครื่องแปลงความถี่
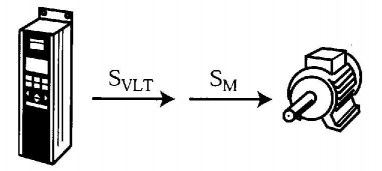
ข้าว. 6.
ตัวอย่างการคำนวณและการเลือกเครื่องแปลงความถี่:
มอเตอร์ไฟฟ้า 7.5 kW, 3x400 V ใช้กระแส 14.73 A. Sm \u003d U x I x √3 / 1000 = 400 x 14.73 √3 / 1000 = 10.2 kVA
สำหรับข้อมูลทางเทคนิคของตัวแปลงความถี่ ตัวแปลงความถี่จะถูกเลือกซึ่งมีกำลังขับสูงสุดอย่างต่อเนื่องมากกว่าหรือเท่ากับ 10.2 kVA ที่ลักษณะแรงบิดคงที่หรือกำลังสอง
3. สามารถเลือกตัวแปลงความถี่ได้ตามกำลัง R m ที่สร้างโดยมอเตอร์ไฟฟ้า อย่างไรก็ตาม วิธีนี้ไม่ถูกต้อง เนื่องจาก cos φ และสัมประสิทธิ์ การกระทำที่เป็นประโยชน์η เปลี่ยนตามโหลด

ข้าว. 7.
ตัวอย่างการคำนวณกำลังของมอเตอร์ไฟฟ้า
มอเตอร์ไฟฟ้าขนาด 3 กิโลวัตต์ที่มี cos φ = 0.80 และ η = 0.81 ใช้พลังงาน S M = P M / (η x cos φ) = 3.0 / (0.80 x 0.81) = 4.6 kVA
สำหรับข้อมูลทางเทคนิคของตัวแปลงความถี่ ตัวแปลงความถี่จะถูกเลือกซึ่งมีกำลังขับสูงสุดอย่างต่อเนื่องมากกว่าหรือเท่ากับ 4.6 kVA ที่ลักษณะแรงบิดคงที่หรือกำลังสอง
4. ในทางปฏิบัติ จัดอันดับอำนาจตัวแปลงความถี่ส่วนใหญ่ตรงกับชุดมาตรฐานของมอเตอร์แบบอะซิงโครนัส ดังนั้น ตัวแปลงความถี่จึงมักถูกเลือกโดยพิจารณาจากการพิจารณานี้ ซึ่งอาจนำไปสู่การกำหนดลักษณะเฉพาะได้ไม่ถูกต้อง โดยเฉพาะอย่างยิ่งหากมอเตอร์ไม่ได้โหลดเต็มที่

ข้าว. แปด.
การกระจายกระแสในตัวแปลงความถี่ (cos φ (phi) ของมอเตอร์)
กระแสสำหรับการทำให้เป็นแม่เหล็กของมอเตอร์นั้นมาจากตัวเก็บประจุที่อยู่ในวงจรกลางของตัวแปลงความถี่ กระแสแม่เหล็กเป็นกระแสปฏิกิริยาที่ไหลระหว่างตัวเก็บประจุและมอเตอร์ (รูปที่ 9)

ข้าว. 9. กระแสในตัวแปลงความถี่
เฉพาะกระแสที่ใช้งาน (l W) มาจากเครือข่าย นั่นคือเหตุผลที่กระแสเอาต์พุตของตัวแปลงความถี่มากกว่ากระแสอินพุตเสมอ นอกจากกระแสที่ใช้งานแล้ว I loss ปัจจุบัน (การสูญเสียปัจจุบัน) จะถูกใช้จากเครือข่าย
ตัวอย่างการคำนวณ
เมื่อไม่มีโหลด กระแสของมอเตอร์ 4 ขั้ว 1.1kW คือ 1.6A กระแสไฟขาออกของตัวแปลงความถี่ที่เชื่อมต่ออยู่ที่ประมาณ 1.6A และกระแสไฟขาเข้าเมื่อทำงานโดยไม่มีโหลดเกือบจะเป็นศูนย์
ผู้ผลิตมอเตอร์มักจะระบุ cos φ ของมอเตอร์ที่พิกัดกระแส ด้วยค่า cos φ ที่น้อยกว่า (เช่น ในกรณีของมอเตอร์รีลัคแทนซ์แบบซิงโครนัส) กระแสไฟที่กำหนดของมอเตอร์ที่ มีค่าเท่ากันกำลังไฟฟ้าและแรงดันไฟฟ้าจะมากขึ้น ดังจะเห็นได้จากสมการต่อไปนี้
I S = I W / cos φ
หากเลือกตัวแปลงความถี่ตามกระแสพิกัดของมอเตอร์ (วิธีที่ 1) จะไม่มีการลดค่าแรงบิดของมอเตอร์
ตัวเก็บประจุที่เชื่อมต่อกับขั้วมอเตอร์สำหรับการชดเชย กระแสปฏิกิริยา,ต้องถอด. เนื่องจากความถี่สวิตชิ่งสูงของตัวแปลงความถี่ ตัวเก็บประจุจึงทำงานเหมือนไฟฟ้าลัดวงจรและทำให้กระแสมอเตอร์เพิ่มขึ้นอย่างมาก อินเวอร์เตอร์จะตีความว่าเป็นความผิดกราวด์หรือไฟฟ้าลัดวงจรและการเดินทาง
การควบคุมความเร็วของมอเตอร์
ความถี่เอาต์พุตของตัวแปลงความถี่และด้วยเหตุนี้ความเร็วของมอเตอร์จึงถูกควบคุมโดยสัญญาณอย่างน้อยหนึ่งสัญญาณ (0-10V, 4-20mA หรือพัลส์แรงดันไฟฟ้า) เมื่อได้รับสัญญาณเพิ่มความเร็ว ความเร็วของมอเตอร์จะเพิ่มขึ้น และส่วนแนวตั้งของเส้นโค้งแรงบิดของมอเตอร์จะเลื่อนไปทางขวา (รูปที่ 10)

ข้าว. 10. ความสัมพันธ์ระหว่างสัญญาณควบคุมกับลักษณะแรงบิดของมอเตอร์
ถ้าแรงบิดโหลดน้อยกว่าแรงบิดพิกัดของมอเตอร์ ความเร็วจะถึงค่าที่ต้องการ ดังแสดงในรูป 11 ลักษณะโหลดตัดกับลักษณะแรงบิดของมอเตอร์ไฟฟ้าในส่วนแนวตั้ง (ที่จุด A) หากการข้ามเกิดขึ้นในส่วนแนวนอน (จุด B) ความเร็วของมอเตอร์จะต้องไม่เกินค่าที่สอดคล้องกันเป็นเวลานาน ตัวแปลงความถี่จะอนุญาตให้เกินขีดจำกัดปัจจุบัน ไฟฟ้าลัดวงจรโดยไม่ต้องปิดเครื่อง (จุด C) แต่ระยะเวลาที่เกินจำเป็นต้องจำกัดเวลา

ข้าว. 11. กระแสไฟของมอเตอร์อาจเกินขีดจำกัดกระแสไฟในระยะเวลาอันสั้น
ทางลาดเร่งและชะลอตัว
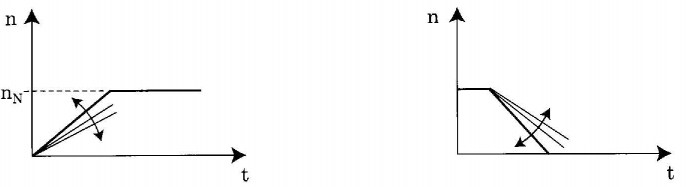
ลักษณะ (ทางลาด) ของการเร่งความเร็วแสดงอัตราที่ความเร็วเพิ่มขึ้นและถูกกำหนดในรูปแบบของเวลาเร่งความเร็ว t acc ทางลาดเหล่านี้อิงตามความถี่มอเตอร์ที่กำหนดเป็นหลัก ตัวอย่างเช่น ทางลาดเร่งความเร็ว 5 วินาที หมายความว่าตัวแปลงความถี่จะใช้เวลา 5 วินาทีในการเปลี่ยนจากศูนย์เป็นความถี่มอเตอร์ที่กำหนด (f = 50 Hz)

ข้าว. 12. เวลาเร่งและลดความเร็ว
ทางลาดลดความเร็วแสดงความเร็วที่ชะลอตัวลง มันถูกกำหนดเป็นเวลาชะลอตัว t ธ.ค.
การเปลี่ยนจากอัตราเร่งเป็นการลดความเร็วโดยตรงนั้นเป็นไปได้ เนื่องจากมอเตอร์จะตามความถี่เอาท์พุตของอินเวอร์เตอร์เสมอ
หากทราบโมเมนต์ความเฉื่อยของเพลามอเตอร์ จะสามารถคำนวณเวลาเร่งความเร็วและชะลอความเร็วที่เหมาะสมได้
tac \u003d J x (n 2 -n 1) / [(T acc - T fric) x 9.55]
tdec = J x (n 2 -n 1)/[(T acc + T fric) x 9.55]
J คือโมเมนต์ความเฉื่อยของเพลามอเตอร์
T fric คือโมเมนต์ความเสียดทานของระบบ
Tass - แรงบิดส่วนเกิน (โอเวอร์โหลด) ที่ใช้สำหรับการเร่งความเร็ว
T dec คือแรงบิดเบรก (แรงบิดเบรก) ที่เกิดขึ้นเมื่อความเร็วอ้างอิงลดลง
n 1 และ n 2 - ความเร็วในการหมุนที่ความถี่ f 1 และ f 2 .
หากตัวแปลงความถี่สามารถให้แรงบิดเกินพิกัดในระยะสั้น แรงบิดในการเร่งความเร็วและการชะลอตัวจะถูกตั้งค่าเป็นแรงบิดมอเตอร์พิกัด T ในทางปฏิบัติ เวลาเร่งความเร็วและเวลาลดความเร็วมักจะเท่ากัน
ตัวอย่างการคำนวณ
J \u003d 0.042 kgm 2, T fric \u003d 0.05 x M N, n 1 \u003d 500 rpm, n 2 \u003d 1,000 rpm, T N \u003d 27 Nm
tacc \u003d J x (n 2 - n 1) / [(T ass - T fric) x 9.55] \u003d 0.042 x (1000 - 500) / [(27.0 - (0.05 x 27.0)) x 9.55] = 0.1 [ s]
การเบรกแบบไดนามิก
เมื่อสัญญาณอ้างอิงความเร็วลดลง มอเตอร์จะทำงานเหมือนเครื่องกำเนิดไฟฟ้าและเบรก การชะลอตัวระหว่างการเบรกขึ้นอยู่กับขนาดของโหลดมอเตอร์
มอเตอร์ไฟฟ้าที่เชื่อมต่อโดยตรงกับกริดจะป้อนกำลังเบรกกลับเข้าสู่กริด
หากมอเตอร์ขับเคลื่อนด้วยตัวแปลงความถี่ พลังงานเบรกจะถูกเก็บไว้ในวงจรกลางของตัวแปลงความถี่ หากกำลังเบรกมีขนาดใหญ่และตัวแปลงความถี่ไม่สามารถกระจายโดยการออกแบบของตัวเอง แรงดันไฟฟ้าของวงจรระดับกลางจะเพิ่มขึ้น
แรงดันไฟฟ้าของวงจรกลางอาจเพิ่มขึ้นจนกว่าตัวแปลงความถี่จะปิดการทำงานโดยการป้องกัน และบางครั้งวงจรระดับกลางต้องโหลดด้วยโมดูลเบรกและตัวต้านทานภายนอกเพื่อดูดซับกำลังเบรก
การใช้โมดูลเบรกและตัวต้านทานเบรกช่วยให้เบรกได้เร็วเมื่อ บรรทุกหนัก. อย่างไรก็ตาม มีปัญหาเกี่ยวกับความร้อน อีกวิธีหนึ่งคือการใช้ชุดเบรกแบบสร้างใหม่ บล็อกดังกล่าวใช้สำหรับเครื่องแปลงความถี่ที่มีวงจรเรียงกระแสที่ไม่มีการควบคุมและส่งคืนพลังงานเบรกไปยังเครือข่ายอุปทาน
ในตัวแปลงความถี่ที่มีวงจรเรียงกระแสแบบควบคุม พลังงานเบรกสามารถส่งกลับไปยังเครือข่ายได้ (ดูรูปที่ 13) โดยใช้ตัวอย่างเช่น อินเวอร์เตอร์ที่เชื่อมต่อแบบป้องกันขนานกับวงจรเรียงกระแส

ข้าว. 13. การเปิดโมดูลเบรกและตัวต้านทานเบรก

ข้าว. 14. อินเวอร์เตอร์แบบ Back-to-back
อีกวิธีหนึ่งในการเบรกมอเตอร์ไฟฟ้าคือการเบรก กระแสตรง. สำหรับการสร้าง สนามแม่เหล็กสเตเตอร์ใช้แรงดันไฟฟ้ากระแสตรงระหว่างสองเฟสของมอเตอร์ เนื่องจากพลังงานการเบรกยังคงอยู่ในมอเตอร์ และอาจเกิดความร้อนสูงเกินไปได้ ขอแนะนำให้ใช้เบรก DC ในช่วงความเร็วต่ำเพื่อไม่ให้เกินกระแสที่กำหนดของมอเตอร์ โดยปกติการเบรก DC จะถูกจำกัดเวลา.?
ย้อนกลับ
ทิศทางการหมุนของมอเตอร์แบบอะซิงโครนัสถูกกำหนดโดยลำดับของเฟสของแรงดันไฟฟ้า
หากมีการย้อนกลับสองเฟส ทิศทางการหมุนของมอเตอร์จะเปลี่ยนไปและจะหมุนไปในทิศทางตรงกันข้าม
มอเตอร์ไฟฟ้าส่วนใหญ่ได้รับการออกแบบมาเพื่อให้เพลามอเตอร์หมุนตามเข็มนาฬิกาหากมีการเชื่อมต่อดังนี้

ข้าว. 15. ทิศทางการหมุนของมอเตอร์ไฟฟ้าเปลี่ยนแปลงโดยการเปลี่ยนลำดับของเฟส
กฎเดียวกันนี้ใช้กับลำดับของเฟสที่ขั้วเอาต์พุตของตัวแปลงความถี่ส่วนใหญ่
ตัวแปลงความถี่สามารถย้อนกลับมอเตอร์โดยการเปลี่ยนลำดับเฟสทางอิเล็กทรอนิกส์ การย้อนกลับทำได้โดยการตั้งค่าความเร็วลบหรือโดยสัญญาณอินพุตดิจิตอล หากในระหว่างการเดินเครื่องเบื้องต้น ต้องการให้มอเตอร์มีทิศทางการหมุนที่แน่นอน ต้องทราบการตั้งค่าเริ่มต้นจากโรงงานของเครื่องแปลงความถี่
เนื่องจากตัวแปลงความถี่จำกัดกระแสของมอเตอร์ให้เป็นค่าที่กำหนด มอเตอร์ที่ควบคุมด้วยตัวแปลงความถี่จึงสามารถย้อนกลับได้บ่อยกว่ามอเตอร์แบบไดเร็ค-ออน-ไลน์
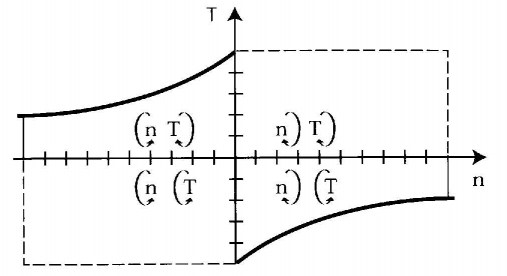
ข้าว. 16. แรงบิดเบรกของอินเวอร์เตอร์ขณะถอยหลัง
ทางลาด
ตัวแปลงความถี่ทั้งหมดมีฟังก์ชันทางลาดเพื่อให้การทำงานราบรื่น ทางลาดเหล่านี้สามารถเปลี่ยนแปลงได้ และด้วยเหตุนี้ การอ้างอิงความเร็วจึงสามารถเพิ่มขึ้นหรือลดลงได้ในช่วงเวลาหนึ่ง
ข้าว. 17. ปรับเวลาเร่งและลดความเร็ว
ความชันในการเร่งความเร็ว/ลดความเร็ว (เวลาเร่ง/ลดความเร็ว) สามารถตั้งค่าให้เล็กจนในบางสถานการณ์มอเตอร์ไม่สามารถทำงานให้เสร็จสิ้นได้ (จะไม่สามารถเร่ง/ลดความเร็วของมอเตอร์ได้ในเวลาที่กำหนด)
ทำให้กระแสของมอเตอร์เพิ่มขึ้นจนกว่าจะถึงขีดจำกัดกระแส ในกรณีของเวลาชะลอตัวสั้น (t-a) แรงดันไฟฟ้าของวงจรกลางอาจเพิ่มขึ้นถึงระดับที่วงจรป้องกันของตัวแปลงความถี่จะหยุดตัวแปลงความถี่
เวลาทางลาดที่เหมาะสมที่สุดสามารถคำนวณได้โดยใช้สูตรด้านล่าง
t a = J x n/[(T N -T fric)x9.55]
t-a = J x n/[(T N +T fric)x9.55]
t a - เวลาเพิ่มความเร็ว
t -a - เวลาชะลอตัว
n - จำนวนรอบ
T N - แรงบิดสูงสุดของมอเตอร์ไฟฟ้า
T fric - โมเมนต์แรงเสียดทาน

ข้าว. 18. การตั้งค่าเวลาทางลาด
โดยปกติเวลาเร่งความเร็ว/ลดความเร็วจะถูกเลือกตามความเร็วของมอเตอร์ที่กำหนด
การควบคุมปัจจุบัน
ตัวแปลงความถี่สามารถตรวจสอบกระบวนการควบคุมและเข้าไปแทรกแซงในกรณีที่เกิดข้อผิดพลาด
การควบคุมดังกล่าวสามารถแบ่งออกเป็นสามประเภทขึ้นอยู่กับวัตถุ: การควบคุมโรงงานในกระบวนการผลิต การควบคุมมอเตอร์ไฟฟ้า และการควบคุมเครื่องแปลงความถี่
การควบคุมการติดตั้งขึ้นอยู่กับการควบคุมความถี่เอาต์พุต กระแสไฟขาออก และแรงบิดของมอเตอร์ ตามพารามิเตอร์เหล่านี้ คุณสามารถตั้งค่าขีดจำกัดได้หลายแบบ ซึ่งเกินจะส่งผลต่อฟังก์ชันการควบคุม ขีดจำกัดเหล่านี้อาจเป็นความเร็วมอเตอร์ต่ำสุดที่อนุญาต (ความถี่ขั้นต่ำ) ที่อนุญาต กระแสสูงสุด(ขีดจำกัดกระแส) หรือแรงบิดมอเตอร์สูงสุดที่อนุญาต (ขีดจำกัดแรงบิด)
ตัวแปลงความถี่สามารถตั้งโปรแกรมได้ เช่น ให้ส่งสัญญาณเตือน ลดความเร็วของมอเตอร์ หรือหยุดมอเตอร์ตัวหลังหากความเร็วเกินขีดจำกัดที่ตั้งไว้
ตัวอย่าง
ในการติดตั้งโดยใช้สายพานร่องวีเพื่อเชื่อมต่อมอเตอร์กับส่วนที่เหลือของระบบ ตัวแปลงความถี่สามารถตั้งโปรแกรมให้ตรวจสอบสภาพของสายพานร่องวีได้
เนื่องจากในกรณีที่สายพานขาด ความถี่เอาต์พุตจะเพิ่มขึ้นเร็วกว่าทางลาดที่ตั้งไว้ ในสถานการณ์เช่นนี้ คุณสามารถใช้ความถี่นี้เพื่อเตือนหรือหยุดมอเตอร์ได้
การควบคุมมอเตอร์สามารถทำได้ด้วยเครื่องแปลงความถี่โดยการตรวจสอบรูปแบบความร้อนของมอเตอร์หรือโดยการเชื่อมต่อเทอร์มิสเตอร์เข้ากับมอเตอร์ ตัวแปลงความถี่สามารถป้องกันมอเตอร์โอเวอร์โหลดโดยทำหน้าที่เหมือนรีเลย์ความร้อน ความถี่เอาต์พุตจะรวมอยู่ในการคำนวณที่ดำเนินการโดยตัวแปลงความถี่ด้วย เพื่อให้แน่ใจว่ามอเตอร์จะไม่โอเวอร์โหลดที่ความเร็วต่ำเนื่องจากการระบายอากาศภายในไม่ดี ตัวแปลงความถี่สมัยใหม่ยังสามารถปกป้องมอเตอร์ที่มีการระบายอากาศได้หากกระแสไฟสูงเกินไป
การควบคุมตัวแปลงความถี่ตามธรรมเนียมแล้วทำในลักษณะที่ว่าในกรณีที่เกิดกระแสเกิน ตัวแปลงจะถูกปิด ตัวแปลงบางตัวอนุญาตให้มีกระแสเกินในระยะสั้น ไมโครโปรเซสเซอร์ในเครื่องแปลงความถี่สามารถคำนึงถึงค่าของกระแสมอเตอร์และเวลาในการใช้งานได้พร้อมกัน ซึ่งทำให้สามารถ การใช้งานที่เหมาะสมที่สุดตัวแปลงความถี่โดยไม่ต้องโอเวอร์โหลด
ตาม Danfoss
เมื่อสตาร์ทเครื่อง กล่าวคือ เมื่อใช้แรงดันไฟฟ้ากับมอเตอร์ไฟฟ้าแบบอยู่กับที่ ความต้านทานจะน้อย และกระแสของโรเตอร์มีค่าสูงสุด ดังนั้นกระแสสเตเตอร์ก็มีค่าสูงสุดเช่นกัน กระแสสเตเตอร์เมื่อสตาร์ทมอเตอร์เรียกว่ากระแสสตาร์ท ประถม เริ่มต้นปัจจุบันเท่ากับกระแสไฟลัดวงจรสามเฟสหลังจากมีความต้านทานเท่ากับความต้านทานของมอเตอร์อยู่กับที่ กระแสเริ่มต้นประกอบด้วยส่วนประกอบสลับกันที่สลายตัวเมื่อความเร็วเพิ่มขึ้น และส่วนประกอบที่ไม่ต่อเนื่องซึ่งสลายตัวในหลายช่วงเวลา เมื่อเปลี่ยน กระแสไฟที่ใช้โดยมอเตอร์ไฟฟ้าจะเปลี่ยนแปลงเพียงเล็กน้อยในตอนแรก และเฉพาะเมื่อเข้าใกล้ความเร็วซิงโครนัสเท่านั้นที่มอเตอร์ไฟฟ้าจะลดลงอย่างรวดเร็ว สิ่งนี้อธิบายโดยธรรมชาติของการเปลี่ยนแปลงความต้านทานของเครื่องยนต์ องค์ประกอบเป็นระยะของกระแสเริ่มต้นของมอเตอร์ไฟฟ้าที่มีโรเตอร์อยู่กับที่นั้นมากกว่ากระแสสูงสุด 4-8 เท่าโดยคำนึงถึงส่วนประกอบ aperiodic จะถึง:
ระยะเวลาในการสตาร์ทมอเตอร์ไฟฟ้าตามกฎแล้วไม่เกิน 10-15 วินาทีและสำหรับมอเตอร์ไฟฟ้าที่มีเงื่อนไขการสตาร์ทยากเท่านั้น ค่านี้อาจนานกว่ามาก
ในกรณีที่เกิดไฟฟ้าลัดวงจรในเครือข่ายอุปทานใกล้กับขั้วของมอเตอร์ไฟฟ้า อันหลังเนื่องจาก EMF ภายในที่สนับสนุนโดยพลังงานของสนามแม่เหล็ก ส่งกระแสไฟฟ้าที่สลายตัวอย่างรวดเร็วไปยังไซต์ไฟฟ้าลัดวงจร ไฟกระชากลัดวงจรสามารถเข้าถึงกระแสไฟกระชากได้ การพึ่งพาแรงบิดของมอเตอร์ไฟฟ้ากับแรงดันไฟฟ้านั้นแสดงโดยสูตร:
เมื่อไฟฟ้าลัดวงจรในเครือข่าย แรงดันไฟฟ้าที่ขั้วของมอเตอร์ไฟฟ้าจะลดลง ด้วยเหตุนี้ โมเมนต์ของมอเตอร์ไฟฟ้าจึงลดลง และพวกเขาก็เริ่มช้าลง เพิ่มการลื่นจนกว่าความเท่าเทียมกันจะกลับคืนมาอีกครั้ง หากในเวลาเดียวกันปรากฎว่ามอเตอร์ไฟฟ้าจะอยู่ที่ขีด จำกัด ของการทำงานที่มั่นคงและมีค่าเท่ากับวิกฤต ด้วยแรงดันไฟฟ้าที่ลดลงอีก มอเตอร์ไฟฟ้าจะถูกเบรกจนกว่าจะหยุดโดยสมบูรณ์ หลังจากที่ไฟฟ้าลัดวงจรถูกปิด แรงดันไฟฟ้าของแหล่งจ่ายกลับคืนมา และลักษณะการทำงานเพิ่มเติมของมอเตอร์ไฟฟ้าจะขึ้นอยู่กับสลิปที่เกิดขึ้นในขณะฟื้นฟูแรงดันไฟ และค่าที่สอดคล้องกัน
เมื่อมอเตอร์ไฟฟ้าจะเปลี่ยนเป็นความเร็วปกติและเมื่อ M d< М с จะชะลอตัวต่อไปจนกว่าจะหยุดโดยสมบูรณ์ ในกรณีนี้ต้องปิดมอเตอร์ไฟฟ้า เนื่องจากจะกินกระแสไฟเริ่มต้นโดยไม่สามารถหมุนได้
สตาร์ทมอเตอร์ไฟฟ้าได้เองหนักกว่าสตาร์ทปกติ สิ่งนี้อธิบายได้จากข้อเท็จจริงที่ว่าในระหว่างการสตาร์ทตัวเอง มอเตอร์ไฟฟ้าเริ่มทำงาน และมอเตอร์ไฟฟ้าที่มีเฟสโรเตอร์ - โดยไม่มีรีโอสแตตสตาร์ทในวงจรโรเตอร์ ซึ่งจะช่วยลดแรงบิดในการสตาร์ทและเพิ่มกระแสสตาร์ทและสุดท้ายขนาดใหญ่ จำนวนมอเตอร์ไฟฟ้าเริ่มทำงานพร้อมกัน ซึ่งทำให้แรงดันไฟฟ้าตกในเครือข่ายอุปทานจากกระแสไฟเริ่มต้นทั้งหมด อย่างไรก็ตาม การสตาร์ทมอเตอร์ไฟฟ้าด้วยตนเองนั้นค่อนข้างง่าย ดังนั้นการเริ่มต้นด้วยตนเองของมอเตอร์ไฟฟ้าสำหรับความต้องการเสริมของโรงไฟฟ้าจึงเป็นไปได้แม้ในกรณีเหล่านั้นเมื่อในช่วงเวลาแรกหลังจากการคืนค่าแรงดันไฟฟ้า ในกรณีนี้ เวลาเริ่มต้นด้วยตนเองทั้งหมดไม่เกิน 30- 35 วินาทีซึ่งอนุญาตให้ใช้ความร้อนได้
ในกรณีที่ขดลวดสเตเตอร์ขาดช่วงใดช่วงหนึ่ง มอเตอร์ไฟฟ้าจะยังคงทำงานต่อไป ในกรณีนี้ ความเร็วของโรเตอร์จะลดลงบ้าง และขดลวดของสองเฟสที่เหลือทำงานนั้นโอเวอร์โหลดด้วยกระแสไฟที่มากกว่าปกติ 1.5-2 เท่า การป้องกันการทำงานสองเฟสก่อนหน้านี้ใช้เฉพาะกับมอเตอร์ไฟฟ้าที่มีกำลังสูงถึง 500 V ซึ่งป้องกันโดยฟิวส์ หากการทำงานแบบสองเฟสอาจทำให้มอเตอร์ไฟฟ้าเสียหายได้ ปัจจุบันเนื่องจากมอเตอร์ไฟฟ้าแรงสูงมีราคาสูงและมีความเป็นไปได้สูงที่จะเกิดโหมดไม่เต็มเฟสในเครือข่ายอุปทานจึงถือว่าเหมาะสมโดยไม่ต้องแนะนำ ความคุ้มครองพิเศษจากการทำงานแบบสองเฟสให้ปิดมอเตอร์ที่มีการป้องกันการโอเวอร์โหลดซึ่งมีการตั้งค่าที่เหมาะสมสำหรับจุดประสงค์นี้ ในกรณีนี้ ส่วนประกอบป้องกันการโอเวอร์โหลดในปัจจุบันจะต้องเชื่อมต่อกับหม้อแปลงกระแสของมอเตอร์อย่างน้อย 2 เฟส
การวิเคราะห์ความเสียหายของมอเตอร์แบบอะซิงโครนัสแสดงให้เห็นว่าสาเหตุหลักของความล้มเหลวคือการทำลายฉนวนเนื่องจากความร้อนสูงเกินไป
โอเวอร์โหลดผลิตภัณฑ์ไฟฟ้า (อุปกรณ์)- เกินมูลค่าที่แท้จริงของกำลังไฟฟ้าหรือกระแสไฟของผลิตภัณฑ์ไฟฟ้า (อุปกรณ์) มากกว่าค่าเล็กน้อย (GOST 18311-80)
อุณหภูมิความร้อนของขดลวดมอเตอร์ไฟฟ้า gatelaขึ้นอยู่กับลักษณะทางความร้อนของเครื่องยนต์และพารามิเตอร์ด้านสิ่งแวดล้อม ความร้อนบางส่วนที่ปล่อยออกมาในมอเตอร์ใช้เพื่อให้ความร้อนแก่ขดลวด และส่วนที่เหลือจะถูกปล่อยออกสู่สิ่งแวดล้อม กระบวนการทำความร้อนได้รับผลกระทบจาก พารามิเตอร์ทางกายภาพเป็นความจุความร้อนและการถ่ายเทความร้อน
ขึ้นอยู่กับ สถานะความร้อนของมอเตอร์และอากาศแวดล้อมระดับอิทธิพลอาจแตกต่างกันไป หากความแตกต่างของอุณหภูมิระหว่างเครื่องยนต์กับสิ่งแวดล้อมมีน้อย และพลังงานที่ปล่อยออกมามีความสำคัญ ส่วนหลักของเครื่องยนต์จะถูกดูดซับโดยขดลวด สเตเตอร์ และเหล็กโรเตอร์ ตัวเรือนมอเตอร์ และส่วนอื่นๆ ของมัน กำลังเกิดขึ้น อุณหภูมิฉนวนเพิ่มขึ้นอย่างมาก. เมื่อความร้อนเพิ่มขึ้น ผลของการถ่ายเทความร้อนก็จะเด่นชัดมากขึ้น กระบวนการนี้เกิดขึ้นหลังจากเข้าสู่สมดุลระหว่างความร้อนที่ปล่อยออกมากับความร้อนที่ปล่อยสู่สิ่งแวดล้อม
การเพิ่มกระแสเกินค่าที่อนุญาตไม่ได้นำไปสู่ ภาวะฉุกเฉิน. ต้องใช้เวลาสักระยะก่อนที่สเตเตอร์และโรเตอร์จะถึงขีดจำกัดอุณหภูมิ ดังนั้นจึงไม่จำเป็นสำหรับการป้องกันเพื่อตอบสนองต่อทุกกระแสไฟเกิน ควรปิดเครื่องเฉพาะในกรณีที่มีอันตรายจากการสึกหรออย่างรวดเร็วของฉนวน
จากมุมมองของการให้ความร้อนแก่ฉนวนขนาดและระยะเวลาของการไหลของกระแสที่เกินค่าเล็กน้อยมีความสำคัญอย่างยิ่ง พารามิเตอร์เหล่านี้ขึ้นอยู่กับธรรมชาติของกระบวนการทางเทคโนโลยีเป็นหลัก
มอเตอร์ไฟฟ้าที่มีแหล่งกำเนิดทางเทคโนโลยีมากเกินไป
 มอเตอร์ไฟฟ้าเกินพิกัดที่เกิดจากแรงบิดที่เพิ่มขึ้นเป็นระยะบนเพลาของเครื่องทำงานในเครื่องจักรและการติดตั้งดังกล่าว กำลังของมอเตอร์ไฟฟ้าจะเปลี่ยนแปลงตลอดเวลา เป็นการยากที่จะสังเกตเห็นช่วงเวลาที่ยาวนานในระหว่างที่กระแสน้ำจะยังคงไม่เปลี่ยนแปลงในขนาด ช่วงเวลาความต้านทานขนาดใหญ่ในระยะสั้นเกิดขึ้นเป็นระยะบนเพลามอเตอร์ทำให้เกิดกระแสไฟกระชาก
มอเตอร์ไฟฟ้าเกินพิกัดที่เกิดจากแรงบิดที่เพิ่มขึ้นเป็นระยะบนเพลาของเครื่องทำงานในเครื่องจักรและการติดตั้งดังกล่าว กำลังของมอเตอร์ไฟฟ้าจะเปลี่ยนแปลงตลอดเวลา เป็นการยากที่จะสังเกตเห็นช่วงเวลาที่ยาวนานในระหว่างที่กระแสน้ำจะยังคงไม่เปลี่ยนแปลงในขนาด ช่วงเวลาความต้านทานขนาดใหญ่ในระยะสั้นเกิดขึ้นเป็นระยะบนเพลามอเตอร์ทำให้เกิดกระแสไฟกระชาก
การบรรทุกเกินพิกัดดังกล่าวมักจะไม่ทำให้เกิดความร้อนสูงเกินไปของขดลวดมอเตอร์ ซึ่งมีความเฉื่อยทางความร้อนที่ค่อนข้างสูง อย่างไรก็ตาม ด้วยระยะเวลาที่ยาวนานเพียงพอและการทำซ้ำซ้ำๆ จึงถูกสร้างขึ้น การป้องกันจะต้อง "แยกแยะ" โหมดเหล่านี้ ไม่ควรตอบสนองต่อแรงกระแทกระยะสั้นของโหลด
ในเครื่องอื่นๆ อาจเกิดการโอเวอร์โหลดที่ค่อนข้างเล็กแต่ในระยะยาว ขดลวดของมอเตอร์จะค่อยๆ ร้อนขึ้นจนถึงอุณหภูมิที่ใกล้เคียงกับค่าสูงสุดที่อนุญาต โดยปกติมอเตอร์ไฟฟ้าจะมีระยะขอบทางความร้อนที่แน่นอน และกระแสน้ำเกินเล็กน้อย แม้จะทำงานเป็นระยะเวลานาน แต่ก็ไม่สามารถสร้างสถานการณ์ที่เป็นอันตรายได้ ในกรณีนี้ ไม่จำเป็นต้องปิดเครื่อง ดังนั้นที่นี่เช่นกัน การป้องกันมอเตอร์ต้อง "แยกแยะ" โอเวอร์โหลดที่เป็นอันตรายจากอันที่ไม่เป็นอันตราย
ยกเว้น แหล่งกำเนิดทางเทคโนโลยีมากเกินไป, เป็นไปได้ โอเวอร์โหลดฉุกเฉินเกิดขึ้นจากสาเหตุอื่น (อุบัติเหตุในสายจ่ายไฟฟ้า การติดขัดของชิ้นงาน แรงดันไฟตก ฯลฯ) พวกเขาสร้างโหมดการทำงานของตนเอง มอเตอร์เหนี่ยวนำและหยิบยื่น ข้อกำหนดอุปกรณ์ป้องกัน. พิจารณาพฤติกรรมของมอเตอร์แบบอะซิงโครนัสในสภาวะฉุกเฉินทั่วไป
โอเวอร์โหลดระหว่างการทำงานต่อเนื่องกับโหลดคงที่
โดยปกติมอเตอร์ไฟฟ้าจะถูกเลือกด้วยอัตรากำลังที่แน่นอน นอกจากนี้, ที่สุดเวลาที่เครื่องโหลดน้อยเกินไป เป็นผลให้กระแสของมอเตอร์มักจะต่ำกว่าค่าเล็กน้อย ตามกฎแล้วโอเวอร์โหลดเกิดขึ้นในกรณีที่มีการละเมิดเทคโนโลยี, พัง, ติดขัดและติดขัดในเครื่องทำงาน
เครื่องจักร เช่น พัดลม ปั๊มหอยโข่ง สายพานและสกรูลำเลียง ให้โหลดคงที่ที่เงียบหรือเปลี่ยนแปลงเล็กน้อย การเปลี่ยนแปลงในการจัดหาวัสดุในระยะสั้นแทบไม่มีผลกระทบต่อความร้อนของมอเตอร์ไฟฟ้า พวกเขาสามารถละเลย เป็นเรื่องที่แตกต่างกันหากการละเมิดสภาพการทำงานปกติยังคงอยู่เป็นเวลานาน
ไดรฟ์ไฟฟ้าส่วนใหญ่มีพลังงานสำรองที่แน่นอน การโอเวอร์โหลดทางกลทำให้เกิดการพังทลายของชิ้นส่วนเครื่องจักรเป็นหลัก อย่างไรก็ตาม เมื่อพิจารณาถึงลักษณะสุ่มของการเกิดขึ้นแล้ว เราไม่สามารถแน่ใจได้ว่ามอเตอร์ไฟฟ้าจะทำงานหนักเกินไปในบางสถานการณ์ ตัวอย่างเช่น สิ่งนี้สามารถเกิดขึ้นได้กับมอเตอร์สกรูลำเลียง การเปลี่ยนแปลงคุณสมบัติทางกายภาพและทางกลของวัสดุที่ขนส่ง (ความชื้น ขนาดอนุภาค ฯลฯ) จะสะท้อนให้เห็นในพลังงานที่จำเป็นในการเคลื่อนย้ายทันที การป้องกันจะต้องปิดมอเตอร์ในกรณีที่มีการโอเวอร์โหลดซึ่งก่อให้เกิดความร้อนสูงเกินไปของขดลวดที่เป็นอันตราย

จากมุมมองของอิทธิพลของกระแสเกินในระยะยาวต่อฉนวนควรมีการโอเวอร์โหลดสองประเภทในขนาด: ค่อนข้างเล็ก (มากถึง 50%) และขนาดใหญ่ (มากกว่า 50%)
การกระทำของอดีตไม่ปรากฏขึ้นทันที แต่ค่อย ๆ ในขณะที่ผลที่ตามมาปรากฏขึ้นหลังจากช่วงเวลาสั้น ๆ หากอุณหภูมิสูงกว่าค่าที่อนุญาตมีน้อย การเสื่อมสภาพของฉนวนจะเกิดขึ้นอย่างช้าๆ การเปลี่ยนแปลงเล็กน้อยในโครงสร้างของวัสดุฉนวนจะค่อยๆ สะสม เมื่ออุณหภูมิสูงขึ้น กระบวนการชราภาพก็จะเร่งขึ้นอย่างมาก
คิดว่า ความร้อนสูงเกินที่อนุญาตสำหรับทุกๆ 8 - 10 ° C จะลดอายุการใช้งานของฉนวนของขดลวดมอเตอร์ลงครึ่งหนึ่งทางนี้, ความร้อนสูงเกินไป 40°C ช่วยลดอายุการใช้งานของฉนวนได้ถึง 32 เท่า!แม้ว่าจะมีจำนวนมาก แต่ก็พบได้หลังจากดำเนินการมาหลายเดือน
เมื่อโอเวอร์โหลดสูง (มากกว่า 50%) ฉนวนจะถูกทำลายอย่างรวดเร็วภายใต้อิทธิพลของอุณหภูมิสูง
ในการวิเคราะห์กระบวนการทำความร้อน เราใช้แบบจำลองเครื่องยนต์แบบง่าย การเพิ่มขึ้นของกระแสทำให้เกิดการสูญเสียตัวแปรเพิ่มขึ้น ขดลวดเริ่มร้อนขึ้น อุณหภูมิของฉนวนจะเปลี่ยนไปตามกราฟในรูป ขนาดของอุณหภูมิที่เพิ่มขึ้นคงที่ขึ้นอยู่กับขนาดของกระแส
หลังจากเกิดการโอเวอร์โหลด อุณหภูมิของขดลวดถึงค่าที่อนุญาตสำหรับชั้นฉนวนนี้ เมื่อโอเวอร์โหลดมากก็จะสั้นลง โอเวอร์โหลดน้อยก็จะยาวขึ้น ดังนั้นแต่ละค่าโอเวอร์โหลดจะมีค่าของตัวเอง เวลาที่อนุญาตซึ่งถือได้ว่าปลอดภัยสำหรับการแยกตัว
การพึ่งพาระยะเวลาเกินพิกัดที่อนุญาตตามขนาดของมันเรียกว่า ลักษณะโอเวอร์โหลดของมอเตอร์ไฟฟ้า. คุณสมบัติทางอุณหพลศาสตร์มีความแตกต่างกัน เส้นทึบในภาพแสดงคุณลักษณะเหล่านี้อย่างใดอย่างหนึ่ง

จากลักษณะข้างต้น เราสามารถกำหนด หนึ่งในข้อกำหนดหลัก. มันควรจะทำงานขึ้นอยู่กับขนาดของการโอเวอร์โหลด E ทำให้สามารถขจัดสัญญาณเตือนที่ผิดพลาดระหว่างไฟกระชากที่ไม่เป็นอันตรายซึ่งเกิดขึ้นได้ เช่น เมื่อสตาร์ทเครื่องยนต์ การป้องกันควรทำงานเฉพาะเมื่อเข้าสู่พื้นที่ของค่าปัจจุบันที่ยอมรับไม่ได้และระยะเวลาของการไหล คุณลักษณะที่ต้องการซึ่งแสดงในรูปที่มีเส้นประต้องอยู่ใต้ลักษณะโอเวอร์โหลดของมอเตอร์เสมอ
การทำงานของการป้องกันได้รับผลกระทบจากปัจจัยหลายประการ (ความไม่ถูกต้องของการตั้งค่า การแพร่กระจายของพารามิเตอร์ ฯลฯ) ซึ่งเป็นผลมาจากการเบี่ยงเบนจากค่าเฉลี่ยของเวลาตอบสนอง ดังนั้น เส้นโค้งประบนกราฟจึงควรพิจารณาเป็นคุณลักษณะเฉลี่ยบางอย่าง เพื่อให้ลักษณะไม่ตัดกันอันเป็นผลมาจากการกระทำของปัจจัยสุ่มซึ่งจะทำให้เกิดการดับเครื่องยนต์ไม่ถูกต้องจำเป็นต้องให้ระยะขอบที่แน่นอน อันที่จริง เราต้องไม่จัดการกับลักษณะเฉพาะที่แยกจากกัน แต่ด้วยเขตป้องกันที่คำนึงถึงการแพร่กระจายของเวลาตอบสนองการป้องกัน
 ในแง่ที่แน่นอน การป้องกันมอเตอร์เป็นที่พึงปรารถนาที่ลักษณะทั้งสองจะใกล้เคียงกันมากที่สุด วิธีนี้จะช่วยหลีกเลี่ยงการสะดุดโดยไม่จำเป็นเมื่อการโอเวอร์โหลดใกล้จะยอมรับได้ อย่างไรก็ตาม เมื่อมีคุณลักษณะทั้งสองอย่างแพร่หลาย สิ่งนี้ไม่สามารถทำได้ เพื่อไม่ให้ตกอยู่ในโซนของค่าปัจจุบันที่ยอมรับไม่ได้ในกรณีที่มีการเบี่ยงเบนแบบสุ่มจากพารามิเตอร์ที่คำนวณได้จำเป็นต้องให้ระยะขอบที่แน่นอน
ในแง่ที่แน่นอน การป้องกันมอเตอร์เป็นที่พึงปรารถนาที่ลักษณะทั้งสองจะใกล้เคียงกันมากที่สุด วิธีนี้จะช่วยหลีกเลี่ยงการสะดุดโดยไม่จำเป็นเมื่อการโอเวอร์โหลดใกล้จะยอมรับได้ อย่างไรก็ตาม เมื่อมีคุณลักษณะทั้งสองอย่างแพร่หลาย สิ่งนี้ไม่สามารถทำได้ เพื่อไม่ให้ตกอยู่ในโซนของค่าปัจจุบันที่ยอมรับไม่ได้ในกรณีที่มีการเบี่ยงเบนแบบสุ่มจากพารามิเตอร์ที่คำนวณได้จำเป็นต้องให้ระยะขอบที่แน่นอน
ลักษณะการป้องกันต้องอยู่ห่างจากลักษณะโอเวอร์โหลดของมอเตอร์พอสมควร เพื่อป้องกันจุดตัดร่วมกัน แต่ส่งผลให้สูญเสียความแม่นยำในการป้องกันมอเตอร์
ในบริเวณกระแสน้ำใกล้กับค่าเล็กน้อย โซนความไม่แน่นอนจะปรากฏขึ้น เมื่อเข้าสู่โซนนี้ไม่สามารถบอกได้แน่ชัดว่าการป้องกันจะได้ผลหรือไม่
ข้อเสียดังกล่าวไม่มีอยู่ใน. ซึ่งแตกต่างจากการป้องกันปัจจุบัน โดยการทำงานขึ้นอยู่กับสาเหตุของอายุของฉนวน ความร้อน เมื่อถึงอุณหภูมิที่เป็นอันตรายต่อขดลวด มอเตอร์จะปิดโดยไม่คำนึงถึงสาเหตุที่ทำให้เกิดความร้อน นี่คือข้อดีหลักประการหนึ่ง ป้องกันอุณหภูมิ.
อย่างไรก็ตาม ข้อเสียของการป้องกันปัจจุบันไม่ควรเกินจริง ความจริงก็คือมอเตอร์มีระยะขอบที่แน่นอน จัดอันดับปัจจุบันมอเตอร์อยู่ต่ำกว่ากระแสที่อุณหภูมิของขดลวดถึงค่าที่ยอมรับได้เสมอ ก่อตั้งขึ้นโดยได้รับคำแนะนำจากการคำนวณทางเศรษฐกิจ ดังนั้น ที่พิกัดโหลด อุณหภูมิของขดลวดมอเตอร์ต่ำกว่าค่าที่อนุญาต ด้วยเหตุนี้การสำรองความร้อนของเครื่องยนต์จึงถูกสร้างขึ้นซึ่งชดเชยข้อเสียในระดับหนึ่ง
ปัจจัยหลายประการที่สถานะความร้อนของฉนวนขึ้นอยู่กับการเบี่ยงเบนแบบสุ่ม ในเรื่องนี้ การปรับแต่งคุณสมบัติไม่ได้ให้ผลลัพธ์ที่ต้องการเสมอไป
โอเวอร์โหลดสำหรับการทำงานต่อเนื่องแบบแปรผัน
 ส่วนประกอบและกลไกการทำงานบางอย่างจะสร้างภาระที่แตกต่างกันไปในวงกว้าง เช่น ในเครื่องจักรสำหรับการบด การเจียร และการทำงานอื่นๆ ที่คล้ายคลึงกัน ที่นี่การโอเวอร์โหลดเป็นระยะจะมาพร้อมกับอันเดอร์โหลดเพื่อทำงาน ไม่ทำงาน. การเพิ่มขึ้นของกระแสแต่ละครั้งแยกกันไม่นำไปสู่การเพิ่มขึ้นของอุณหภูมิที่เป็นอันตราย อย่างไรก็ตามหากมีจำนวนมากและทำซ้ำบ่อยครั้งเพียงพอผลของอุณหภูมิที่เพิ่มขึ้นต่อฉนวนจะสะสมอย่างรวดเร็ว
ส่วนประกอบและกลไกการทำงานบางอย่างจะสร้างภาระที่แตกต่างกันไปในวงกว้าง เช่น ในเครื่องจักรสำหรับการบด การเจียร และการทำงานอื่นๆ ที่คล้ายคลึงกัน ที่นี่การโอเวอร์โหลดเป็นระยะจะมาพร้อมกับอันเดอร์โหลดเพื่อทำงาน ไม่ทำงาน. การเพิ่มขึ้นของกระแสแต่ละครั้งแยกกันไม่นำไปสู่การเพิ่มขึ้นของอุณหภูมิที่เป็นอันตราย อย่างไรก็ตามหากมีจำนวนมากและทำซ้ำบ่อยครั้งเพียงพอผลของอุณหภูมิที่เพิ่มขึ้นต่อฉนวนจะสะสมอย่างรวดเร็ว
กระบวนการทำความร้อนด้วยมอเตอร์ที่โหลดแปรผันแตกต่างจากกระบวนการให้ความร้อนที่โหลดตัวแปรคงที่หรือแสดงอย่างอ่อน ความแตกต่างปรากฏขึ้นทั้งในช่วงการเปลี่ยนแปลงของอุณหภูมิและในลักษณะของการให้ความร้อนของแต่ละชิ้นส่วนของเครื่อง
เมื่อโหลดเปลี่ยนไป อุณหภูมิของขดลวดก็เช่นกัน เนื่องจากความเฉื่อยทางความร้อนของมอเตอร์ ความผันผวนของอุณหภูมิจึงน้อยลง เมื่อพอ ความถี่สูงโหลดอุณหภูมิของขดลวดถือได้ว่าไม่เปลี่ยนแปลงในทางปฏิบัติ โหมดการทำงานนี้จะเทียบเท่ากับโหมดระยะยาวที่มีการโหลดคงที่ ที่ความถี่ต่ำ (จากหนึ่งในร้อยของเฮิรตซ์หรือต่ำกว่า) ความผันผวนของอุณหภูมิจะสังเกตเห็นได้ชัดเจน ความร้อนสูงเกินไปเป็นระยะ ๆ อาจทำให้อายุการใช้งานของฉนวนสั้นลง
ด้วยความผันผวนของโหลดขนาดใหญ่ที่มีความถี่ต่ำ มอเตอร์ไฟฟ้าจึงอยู่ในกระบวนการชั่วคราวอย่างต่อเนื่อง อุณหภูมิของขดลวดจะเปลี่ยนไปตามความผันผวนของโหลด เนื่องจากแต่ละชิ้นส่วนของเครื่องมีพารามิเตอร์ทางอุณหพลศาสตร์ที่แตกต่างกัน แต่ละส่วนจึงร้อนขึ้นในแบบของตัวเอง
การไหลของอุณหภูมิชั่วคราวภายใต้ภาระที่เปลี่ยนแปลงเป็นปรากฏการณ์ที่ซับซ้อนและไม่คล้อยตามการคำนวณเสมอไป ดังนั้นอุณหภูมิของขดลวดของมอเตอร์จึงไม่สามารถตัดสินได้จากกระแสที่ไหลในช่วงเวลาที่กำหนด เนื่องจากมอเตอร์ไฟฟ้าแต่ละส่วนมีความร้อนแตกต่างกัน ภายในมอเตอร์ไฟฟ้าจึงมีความร้อนไหลจากส่วนหนึ่งไปยังส่วนอื่นๆ อาจเป็นไปได้ว่าหลังจากปิดมอเตอร์แล้ว อุณหภูมิของขดลวดสเตเตอร์จะเพิ่มขึ้นเนื่องจากความร้อนที่มาจากโรเตอร์ ดังนั้นขนาดของกระแสอาจไม่สะท้อนถึงระดับความร้อนของฉนวน ควรพิจารณาด้วยว่าในบางโหมดโรเตอร์จะร้อนขึ้นอย่างเข้มข้นและเย็นลงน้อยกว่าสเตเตอร์
ความซับซ้อนของกระบวนการถ่ายเทความร้อนทำให้ยากขึ้น การควบคุมความร้อนของมอเตอร์. แม้แต่การวัดอุณหภูมิโดยตรงของขดลวดก็สามารถทำให้เกิดข้อผิดพลาดได้ภายใต้เงื่อนไขบางประการ ความจริงก็คือในระหว่างกระบวนการทางความร้อนที่ไม่คงที่ อุณหภูมิความร้อนของชิ้นส่วนต่างๆ ของเครื่องอาจแตกต่างกัน และการวัด ณ จุดหนึ่งไม่สามารถให้ภาพที่แท้จริงได้ อย่างไรก็ตาม เมื่อเทียบกับวิธีการอื่น การวัดอุณหภูมิที่คดเคี้ยวให้ผลลัพธ์ที่แม่นยำยิ่งขึ้น
มันสามารถนำมาประกอบกับการเสียเปรียบมากที่สุดในแง่ของการป้องกัน การรวมเป็นระยะในการทำงานแสดงให้เห็นถึงความเป็นไปได้ของเครื่องยนต์เกินพิกัดในระยะสั้น ในกรณีนี้ขนาดของการโอเวอร์โหลดควรถูก จำกัด ด้วยเงื่อนไขการให้ความร้อนกับขดลวดไม่สูงกว่าค่าที่อนุญาต
การป้องกัน "การตรวจสอบ" สถานะของความร้อนของขดลวดจะต้องได้รับสัญญาณที่เหมาะสม เนื่องจากกระแสและอุณหภูมิอาจไม่สัมพันธ์กันในสภาวะชั่วขณะ การป้องกันตามการวัดกระแสจึงไม่สามารถทำงานได้อย่างเหมาะสม
เวลาเริ่มต้นเป็นหนึ่งในปัจจัยหลักในการเลือกมอเตอร์ ในขณะที่สตาร์ท มอเตอร์จะใช้กระแสเริ่มต้นจากเครือข่าย ซึ่งเกินกระแสที่กำหนด 5-7 เท่า (สำหรับมอเตอร์แบบอะซิงโครนัสที่มีโรเตอร์กรงกระรอก) ในกรณีนี้ความร้อนที่เพิ่มขึ้นของขดลวดเกิดขึ้น และหากเวลาเริ่มต้นล่าช้า อุณหภูมิของขดลวดอาจเกินค่าที่อนุญาต
ดังนั้นการคูณจึงมีความสำคัญอย่างยิ่งต่อเวลาเร่งความเร็ว แรงบิดเริ่มต้น. ดังนั้น สำหรับไดรฟ์คอมเพรสเซอร์ ขอแนะนำให้ใช้มอเตอร์ไฟฟ้าที่มีแรงบิดเริ่มต้นเพิ่มขึ้น (AOP)
สำหรับหน่วยขนาดเล็กและ พลังปานกลางเวลาเริ่มต้นที่มีการเริ่มต้นที่ค่อนข้างหายากมักจะไม่เกิน 3-5 วินาทีสำหรับหน่วยที่ทรงพลัง - 20-30 วินาที
แรงบิดบนเพลาของมอเตอร์เหนี่ยวนำเป็นสัดส่วนกับกำลังสองของแรงดันไฟฟ้า ดังนั้นแม้แรงดันไฟฟ้าที่ลดลงเล็กน้อยในขณะที่สตาร์ทก็ลดแรงบิดเริ่มต้นลงได้อย่างมาก อาจมีบางกรณีในเครือข่ายที่มีความจุขนาดเล็กเมื่อเครื่องไม่สามารถเริ่มทำงานได้อย่างเต็มที่ ดังนั้นเมื่อเลือกเครื่องยนต์ ค่าของแรงดันไฟต่ำสุดที่อนุญาตซึ่งหน่วยสามารถนำไปใช้งานได้
แรงบิดส่วนเกินขั้นต่ำที่รับรองการเร่งความเร็วของไดรฟ์ต้องมีอย่างน้อย 0.1 พิกัดแรงบิดมอเตอร์ไฟฟ้า. แรงบิดคงที่ของคอมเพรสเซอร์จะถือว่าคงที่ในระหว่างการสตาร์ทและเท่ากับค่าเล็กน้อย (สตาร์ทโดยไม่ต้องขนถ่าย) หากเครือข่ายมีพลังงานไม่เพียงพอและแรงดันไฟฟ้าตกอาจมากกว่าค่าที่คำนวณได้เมื่อเริ่มต้นระบบ ควรเริ่มการทำงานโดยที่ไม่ได้โหลดคอมเพรสเซอร์ หากไม่สามารถสตาร์ทได้ จะต้องเปลี่ยนมอเตอร์โรเตอร์กรงกระรอกด้วยมอเตอร์โรเตอร์โรเตอร์หรือเปลี่ยนวงจรสตาร์ท (ใช้วงจรที่มีข้อจำกัดกระแสสตาร์ท)
วิศวกรรมไฟฟ้าของวงจรควบคุมไดรฟ์ไฟฟ้าคำนึงถึงผลกระทบของการลดแรงดันไฟฟ้าต่อการทำงานของอุปกรณ์สตาร์ทและควบคุม (สตาร์ทเตอร์ รีเลย์ ฯลฯ) การพัฒนาคอมเพรสเซอร์สมัยใหม่มุ่งเป้าไปที่การใช้มอเตอร์ไฟฟ้าในตัวสำหรับการขับเคลื่อนเครื่องจักรขนาดเล็ก กลาง และใหญ่
การศึกษาแรงบิดเริ่มต้นของคอมเพรสเซอร์ระบบทำความเย็นแบบลูกสูบพร้อมมอเตอร์ไฟฟ้าในตัวทำให้สามารถสรุปข้อสรุปบางประการเกี่ยวกับการใช้คอมเพรสเซอร์ทำความเย็นแบบลูกสูบรุ่นหลังเพื่อขับเคลื่อนคอมเพรสเซอร์บางประเภทได้ ดังนั้น การใช้มอเตอร์ไฟฟ้าในตัวทำให้สามารถปิดผนึกคอมเพรสเซอร์ทำความเย็นได้อย่างสมบูรณ์ ปฏิเสธการใช้ข้อต่อระดับกลาง (สายพานไดรฟ์ ข้อต่อ ฯลฯ) ซึ่งเพิ่มความน่าเชื่อถือของการติดตั้งและลดปริมาณ ของโลหะที่ใช้ นอกจากนี้ การทำให้ขดลวดของมอเตอร์เย็นลงด้วยไอสารทำความเย็นจะลดขนาดลงโดยการเพิ่มภาระจำเพาะ
มอเตอร์ไฟฟ้าในตัวมีต้นทุนต่ำกว่ามอเตอร์ไฟฟ้าทั่วไป
การทำงานของคอมเพรสเซอร์ในช่วงอุณหภูมิการระเหยและการควบแน่นที่หลากหลายต้องการประสิทธิภาพสูงจากมอเตอร์ไฟฟ้าในตัว และตัวประกอบกำลัง cos Ф เมื่อโหลดเปลี่ยนแปลงภายในช่วงที่สำคัญ จำเป็นต้องมีการระบายความร้อนที่ดีของขดลวดมอเตอร์และการสตาร์ทคอมเพรสเซอร์ที่เชื่อถือได้ตลอดช่วงอุณหภูมิการทำงานทั้งหมด
เมื่อแรงบิดเริ่มต้นของเครื่องยนต์ลดลง กระบวนการสตาร์ทจะยาวขึ้น ฉนวนมีความร้อนสูงเกินไป และอายุการใช้งานจะลดลง การประเมินแรงบิดเริ่มต้นสูงเกินไปจะลดประสิทธิภาพลง และ cos F ของมอเตอร์และความจุเกิน
ดังนั้นงานในการเลือกมอเตอร์ไฟฟ้าตามแรงบิดเริ่มต้นจึงสัมพันธ์กับความน่าเชื่อถือและประสิทธิภาพของหน่วยทำความเย็นอย่างใกล้ชิด
จากการศึกษาพบว่าด้วยจำนวนกระบอกสูบของคอมเพรสเซอร์ที่เพิ่มขึ้น แรงบิดมู่เล่ และอัตราส่วนการอัดที่ลดลง อัตราส่วนแรงบิดเริ่มต้นจะลดลง
ข้อมูลการทดลองทำให้เราสร้างสิ่งต่อไปนี้สำหรับคอมเพรสเซอร์บางตัวที่มีลักษณะคล้ายคลึงกันในการออกแบบ (สุญญากาศ ไม่มีต่อม):
- เมื่อกำหนดแรงบิดเริ่มต้นของมอเตอร์ไฟฟ้า จำเป็นต้องคำนึงถึงผลกระทบของมวลแรงเหวี่ยงของมอเตอร์ไฟฟ้าและคอมเพรสเซอร์ การรั่วไหลของก๊าซจากกระบอกสูบที่ความเร็วต่ำและความเร็วปกติ
- ยิ่งจำนวนกระบอกสูบของคอมเพรสเซอร์น้อยลงและอัตราส่วนการอัดยิ่งสูง แรงบิดเริ่มต้นของมอเตอร์ไฟฟ้าก็ยิ่งทวีคูณมากขึ้น
- หากจำนวนกระบอกสูบของคอมเพรสเซอร์มากกว่าสี่กระบอกและสตาร์ทเครื่องที่อัตราส่วนการอัดต่ำ สามารถใช้มอเตอร์ไฟฟ้าแบบปกติได้ และไม่มีอัตราส่วนแรงบิดเริ่มต้นที่เพิ่มขึ้น
ข้อมูลเหล่านี้สามารถขยายไปยังคอมเพรสเซอร์ที่มีลักษณะคล้ายกับที่ทดสอบ