หน้า 21 จาก 21
ในการดำเนินงานใน ประเทศต่างๆมีหน่วย EPS มากกว่า 250 ยูนิตพร้อมมอเตอร์ฉุดแบบอะซิงโครนัส มอเตอร์ฉุดลากแบบอะซิงโครนัสใช้กับหัวรถจักรไฟฟ้าฉีดและแยกหัวรถจักร หัวรถจักรดีเซล บนรถไฟฟ้า ทั้งในเขตชานเมืองและรถไฟใต้ดิน
ด้านล่างเราจะพิจารณาพารามิเตอร์ของหัวรถจักรไฟฟ้าซึ่งได้รับการยืนยันจากประสบการณ์แล้ว ซึ่งรวมถึงหัวรถจักรไฟฟ้า E-120 และ E-1200 ซึ่งดำเนินการบนทางรถไฟของรัฐและการขนส่งทางอุตสาหกรรมของเยอรมนีเป็นหลัก ที่น่าสนใจอีกอย่างคือตู้รถไฟไฟฟ้า EA-3000 ที่ดำเนินการในเดนมาร์กและหัวรถจักรไฟฟ้า E-17 ที่ดำเนินการในนอร์เวย์ ประสบการณ์ในการดำเนินงานได้สั่งสมมาอย่างยาวนานสำหรับรถไฟฟ้าใต้ดินในเยอรมนีและฟินแลนด์ ต่อไป เราจะพิจารณาอุปกรณ์ไฟฟ้าของ ERS เป็นหลัก โดยเฉพาะสำหรับไดรฟ์ฉุดลากแบบอะซิงโครนัส
พารามิเตอร์ของตู้รถไฟไฟฟ้าที่มีมอเตอร์ฉุดแบบอะซิงโครนัส พารามิเตอร์หลักของตู้รถไฟไฟฟ้าสรุปไว้ในตาราง 13.4.
คุณสมบัติการออกแบบของตู้รถไฟไฟฟ้าที่พิจารณา:
หัวรถจักรไฟฟ้าทั้งหมดมีตัวขับเพลาเดี่ยวและระบบกันสะเทือนของเฟรมของมอเตอร์ฉุด
เนื่องจากมวลของหัวรถจักรไฟฟ้าต่อเพลาขนาดเล็ก และมวลของอุปกรณ์ไฟฟ้าที่มีนัยสำคัญ ชิ้นส่วนทางกลของหัวรถจักรไฟฟ้าจึงเบามาก
หัวรถจักรไฟฟ้าทั้งหมด (ยกเว้นหัวรถจักรไฟฟ้า E-1200) ให้การกู้คืนพลังงานที่พลังงานโดยประมาณเท่ากับกำลังฉุดของหัวรถจักรไฟฟ้า
หัวรถจักรไฟฟ้าทั้งหมดมีความโดดเด่นด้วยการรบกวนเล็กน้อยในสายการสื่อสารและอุปกรณ์ส่งสัญญาณ
หัวรถจักรไฟฟ้าทั้งหมดมีคุณสมบัติในการยึดเกาะที่ดีและมีอุปกรณ์ที่ค่อนข้างล้ำหน้าในการรักษาค่าสัมประสิทธิ์การใช้คลัตช์ให้อยู่ในระดับสูงในทุกโหมด กล่าวอีกนัยหนึ่ง คุณสมบัติของแอนตี้บ็อกซ์ของมอเตอร์ฉุดแบบอะซิงโครนัสนั้นค่อนข้างจะรับรู้ได้อย่างสมบูรณ์บนตู้ระเนระนาดไฟฟ้าเหล่านี้
ผู้พัฒนาและผู้ผลิตคอนเวอร์เตอร์และระบบควบคุมคือบริษัทแอร์ฟอร์ซ (สวิตเซอร์แลนด์) คุณสมบัติของอุปกรณ์นี้จะกล่าวถึงด้านล่าง
สำหรับตู้รถไฟไฟฟ้าที่ระบุไว้ทั้งหมด ประสบการณ์การใช้งานได้สะสมไว้แล้ว หัวรถจักรไฟฟ้า E1-17 แสดงคุณสมบัติการยึดเกาะที่ดีเมื่อทำงานในสภาพของอาร์กติกบนพื้นที่ภูเขาที่ยากลำบาก อย่างไรก็ตาม ความน่าเชื่อถือของอุปกรณ์ไฟฟ้าในช่วงเริ่มต้นของการทำงานนั้นต่ำกว่าความน่าเชื่อถือของตู้รถไฟไฟฟ้าเชิงพาณิชย์ ความน่าเชื่อถือได้รับการปรับปรุงอย่างต่อเนื่องตลอดหลายปีที่ผ่านมา
ตาราง 13.4
เพื่อรองรับรถไฟยาง รางมาตรฐานจะต้องมีแถบคอนกรีตอยู่ด้านนอกของรางปกติและรางเหล็กแนวตั้งเพิ่มเติมที่ด้านนอก รางนำเหล็กทำหน้าที่เป็นรางกระแสไฟฉุดบวกและลบ
ยานพาหนะมักจะมียาง แต่ต้องใช้ล้อรางเพื่อนำทางตลอดการเดินทางและในกรณีที่ยางแบน ระบบมีราคาแพงในการติดตั้งและบำรุงรักษายาก อีกรูปแบบหนึ่งของแรงฉุดที่ใช้ในทางรถไฟในเมืองคือมอเตอร์เชิงเส้น แสดงให้เห็นในที่นี้คือเครื่องยนต์หลักเมื่อเทียบกับเครื่องยนต์มาตรฐาน ไดอะแกรมอย่างง่ายนี้แสดงหลักการของลิเนียร์มอเตอร์ เมื่อเกราะหมุน วงล้อจะหมุน
พารามิเตอร์ |
หัวรถจักรไฟฟ้า |
|||
ปีที่ผลิต |
||||
กำลัง, ความเร็วกิโลวัตต์, กม./ชม.: สำหรับลิเนียร์มอเตอร์ ทั้งสองส่วนจะถูกแบ่งออกเป็นส่วนส่วนหนึ่งอยู่บนรถไฟและอีกส่วนหนึ่งอยู่บนราง ปฏิสัมพันธ์ทางแม่เหล็กไฟฟ้าระหว่างกระแสในส่วนที่อยู่นิ่งกับส่วนที่เคลื่อนที่ทำให้รถไฟดึงไปตามเส้น มีช่องว่างอากาศระหว่างสองส่วนนี้น้อยมาก ดังแสดงในภาพนี้ ประสิทธิภาพของมอเตอร์แนวราบอยู่ที่ประมาณ 60% ของมอเตอร์ทั่วไป แต่มีข้อได้เปรียบจากชิ้นส่วนที่เคลื่อนไหวน้อยกว่า และไม่มีความแน่นอนในการยึดเกาะของมอเตอร์ทั่วไป การควบคุมแบบหลายหน่วยได้กลายเป็นรูปแบบการควบคุมรถไฟที่ใช้กันทั่วไปทั่วโลกในปัจจุบันซึ่งเดิมทีเป็นผลสืบเนื่องมาจากการทำงานของลิฟต์เมื่อกว่าร้อยปีที่แล้ว |
||||
ขีดสุด |
||||
แรงฉุดเล็กน้อย kN: |
||||
เมื่อเริ่มต้น |
||||
เล็กน้อย ในขั้นต้น ตู้รถไฟไฟฟ้าได้รับการออกแบบเพื่อให้เครื่องยนต์ถูกควบคุมโดยคนขับโดยตรง วงจรไฟฟ้าแรงฉุดต้องผ่านตัวควบคุมขนาดใหญ่ที่ติดตั้งอยู่ในห้องควบคุม คนขับหมุนลูกบิดตามต้องการเพื่อเปลี่ยนสวิตช์ในวงจรเพื่อเพิ่มหรือลดกำลังตามต้องการ ข้อตกลงนี้หมายความว่าผู้ขับขี่ต้องอยู่ใกล้กับเครื่องยนต์ หากต้องหลีกเลี่ยงสายไฟที่ยาวและหนัก มอเตอร์ฉุดสะสมแม้ว่าข้อตกลงนี้จะได้ผลดีพอสมควร ความปรารถนาที่จะเพิ่มเส้นทางรถไฟริมถนนในเมืองอย่างรวดเร็วก็นำไปสู่การรับเลี้ยงบุตรบุญธรรม รีโมท. แนวคิดก็คือหากสามารถควบคุมเครื่องยนต์จากระยะไกลได้ สามารถติดตั้งชุดควบคุมคนขับได้ที่ปลายแต่ละด้านของรถไฟ ไม่จำเป็นต้องเพิ่มหัวรถจักรที่ด้านหลังของรถไฟขาเข้าเพื่อให้สามารถเดินทางกลับได้ จะมีการติดตั้งรถแท็กซี่ที่ปลายแต่ละด้านของรถไฟ และคนขับก็ต้องเปลี่ยนปลายเพื่อเปลี่ยนทิศทาง |
||||
ติดต่อแรงดันไฟฟ้าเครือข่าย kV |
||||
ติดต่อความถี่ปัจจุบันของเครือข่าย Hz |
||||
อัตราทดเกียร์ เมื่อแนวคิดนี้เกิดขึ้น ก็ตระหนักว่าสามารถวางเครื่องยนต์ไว้ที่ใดก็ได้บนรถไฟ เช่นเดียวกับเครื่องยนต์อื่นๆ อีกจำนวนมากที่จำเป็นเพื่อให้มีสมรรถนะตามที่ต้องการ ต้องขอบคุณการพัฒนานี้ แทนที่จะมีมอเตอร์น้อยกว่าที่กระจัดกระจายไปตามรถไฟ แทนที่จะสร้างเครื่องยนต์ขนาดใหญ่หลายเครื่องในหัวรถจักร นี่คือวิธีที่แนวคิดของรถยนต์และรถพ่วงพัฒนาขึ้น รถพ่วงเป็นเพียงยานพาหนะโดยสาร แต่ รถยนต์คือ รถยนต์โดยสารที่มีเครื่องยนต์และอุปกรณ์ควบคุมที่เกี่ยวข้อง |
||||
จำนวนเพลา |
ตู้รถไฟไฟฟ้า EA-3000 ประสบความสำเร็จในการดำเนินการในเดนมาร์ก และการรถไฟของเดนมาร์กตัดสินใจสั่งซื้อตู้รถไฟไฟฟ้าอีกชุดในซีรีส์นี้
หัวรถจักรไฟฟ้า E-120 ได้รับการศึกษาอย่างรอบคอบภายใต้สภาพการทำงาน ซึ่งเกือบจะในทันทีหลังจากการก่อสร้างกลายเป็นว่าเหมาะสมสำหรับการทำงานในสายงานและมีการวิ่งรายเดือน แม้กระทั่งการวิ่งของตู้รถไฟไฟฟ้าแบบอนุกรม ในหัวรถจักรไฟฟ้าเหล่านี้ ในตอนเริ่มต้นของการทำงาน พบส่วนประกอบที่น่าเชื่อถือไม่เพียงพอ อย่างไรก็ตาม ไม่ได้ระบุเฉพาะกับระบบขับเคลื่อนด้วยแรงฉุดไฟฟ้าแบบใหม่ สิ่งเหล่านี้คือหม้อแปลง เครื่องจักรเสริม ฯลฯ อุปกรณ์แปลงสัญญาณแทบไม่ต้องมีการปรับปรุงใดๆ เนื่องจากอุปกรณ์เหล่านี้ได้รับการพัฒนามาอย่างดีในระหว่างการทดสอบม้านั่งของไดรฟ์ไฟฟ้าแบบฉุดลาก
ระดับความน่าเชื่อถือของหัวรถจักรไฟฟ้านั้นเหมือนกับของตู้รถไฟไฟฟ้าแบบอนุกรมที่ดีที่สุด มีแนวโน้มที่จะปรับปรุงความน่าเชื่อถือต่อไป ค่าบำรุงรักษาและซ่อมแซมนั้นต่ำกว่าหัวรถจักรไฟฟ้าที่ผลิตเป็นจำนวนมาก การประหยัดพลังงานเนื่องจากตัวประกอบกำลังสูงและการเบรกแบบสร้างใหม่ได้รับการบันทึกไว้
ข้อดีของหัวรถจักรไฟฟ้า E-120 ในแง่ของการใช้แรงฉุด ตัวประกอบกำลังสูง โดยมีผลรบกวนเล็กน้อยต่อสายสื่อสารและอุปกรณ์ส่งสัญญาณได้รับการยืนยันแล้ว ในแง่ของแรงฉุด หัวรถจักรไฟฟ้า E-120 สี่เพลากลายเป็นว่าเทียบเท่ากับหัวรถจักรไฟฟ้าอนุกรมหกเพลา การทดลองพบว่าควรมีการควบคุมมอเตอร์แบบอะซิงโครนัสแต่ละตัว เพื่อใช้ความเป็นไปได้สูงสุดสำหรับการยึดเกาะของล้อแต่ละล้อ โดยคำนึงถึงการกระจายน้ำหนักบนล้อแบบไดนามิก อย่างไรก็ตาม มันค่อนข้างเป็นไปได้ที่จะจัดหามอเตอร์ฉุดลากแบบอะซิงโครนัสจากยางทั่วไป เช่นเดียวกับที่ทำกับหัวรถจักรไฟฟ้า E-1200
รถไฟหลายขบวนซึ่งเป็นที่รู้จักในชื่อรถไฟเหล่านี้ ได้รับการติดตั้งสายควบคุมที่เรียกว่ารางรถไฟ ซึ่งเชื่อมต่อส่วนควบคุมของคนขับกับส่วนควบคุมเครื่องยนต์และสวิตช์ไฟบนรถแต่ละคัน การเปิดและปิดสวิตช์ไฟทำได้โดยรีเลย์แม่เหล็กที่ทำงานด้วยไฟฟ้าโดยใช้หลักการที่พัฒนาขึ้นสำหรับลิฟต์ แม้ว่าแนวคิดนี้จะติดตั้งบนรถไฟโดยสาร แต่ก็ถูกนำมาใช้กับตู้รถไฟและกลายเป็นวิธีการควบคุมมาตรฐานอย่างรวดเร็ว
ข้าว. 13.9. เส้นโค้งกระแสและแรงดันของหัวรถจักรไฟฟ้าโดยใช้วงจรเรียงกระแสสี่จตุภาค 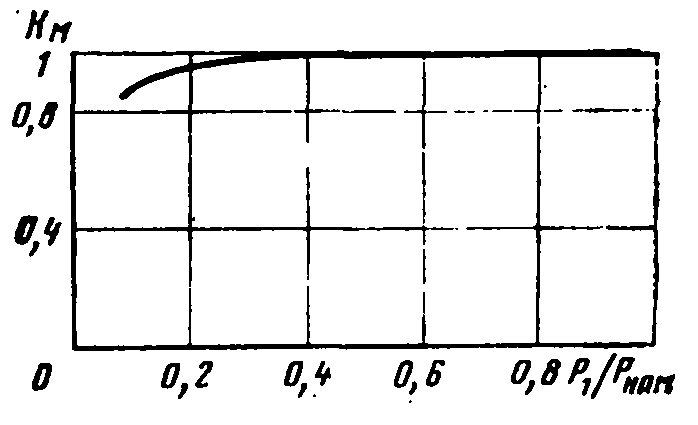
ข้าว. 13.10. การพึ่งพาตัวประกอบกำลังของหัวรถจักรไฟฟ้า H-120 ในการบรรทุก
กระแสไฟฟ้าของรถจักร (รูปที่ 13.9) เกือบจะเป็นไซน์และเกิดขึ้นพร้อมกับเฟสของแรงดันไฟฟ้า U3 การพึ่งพาตัวประกอบกำลังของโหลดแสดงไว้ในรูปที่ 13.10. ในรูป 13.11 เป็นออสซิลโลแกรมของแรงดันและกระแสของเฟสของมอเตอร์ฉุดแบบอะซิงโครนัสโดยปิด PWM ของอินเวอร์เตอร์
ประสบการณ์การใช้งานที่ยาวนานที่สุดได้สะสมไว้ด้วยตู้รถไฟไฟฟ้า E-1200 เหล่านี้เป็นหัวรถจักรไฟฟ้าสี่เพลาสองระบบ (กระแสสลับที่มีความถี่ 50 Hz และ 162/3 Hz) โดยการนัดหมายและการส่งออกที่มีค่าแรงดึงสูง ภายใต้สภาพการทำงานที่ยากลำบากในลุ่มน้ำ Ruhr พวกเขาพบข้อได้เปรียบที่สำคัญเหนือตู้รถไฟไฟฟ้าแบบเรียงกระแสที่มีมอเตอร์กระแสไฟเป็นจังหวะ (EA-1000 หัวรถจักรไฟฟ้า)
ผลลัพธ์หลักของการทำงานของหัวรถจักรไฟฟ้าของทั้งสองประเภทที่กำลังพิจารณาอยู่ในตาราง 13.5. หัวรถจักรทั้งสองดำเนินการภายใต้เงื่อนไขเดียวกัน
จากตาราง. 13.5 ตามนั้น หัวรถจักรไฟฟ้า E-1200 เมื่อเทียบกับหัวรถจักรไฟฟ้า EA-1000 มีความสามารถในการขนส่งที่มากกว่า ค่าใช้จ่ายในการดำเนินงานที่ต่ำกว่า และค่าซ่อม เป็นที่น่าสังเกตว่าหัวรถจักรไฟฟ้าที่มีพื้นฐาน การออกแบบใหม่ไดรฟ์ไฟฟ้า จำนวนความเสียหายลดลงครึ่งหนึ่ง ตัวบ่งชี้ที่สำคัญคือการลดการใช้ทรายลงสามเท่าเมื่อใช้แรงฉุดที่เพิ่มขึ้น
ตู้รถไฟไฟฟ้าจำนวนหนึ่งที่คล้ายกับตู้รถไฟไฟฟ้า E-1200 ดำเนินการสำเร็จในออสเตรีย
การติดตั้งตัวแปลง ในคำสั่งนำร่อง ตัวเลือกหลักทั้งหมดสำหรับคอนเวอร์เตอร์ได้รับการทดสอบ ซึ่งเป็นการรวมกันของอินพุทคอนเวอร์เตอร์ในรูปแบบของวงจรเรียงกระแสแบบควบคุมหรือ สวิตช์ควบคุมแรงดันไฟฟ้ากระแสสลับและกระแสตรงในเครือข่ายหน้าสัมผัสตามลำดับและตัวแปลงความถี่เอาต์พุตในรูปแบบของอินเวอร์เตอร์แรงดันหรือกระแส
ตาราง 13.5
รีเลย์เป็นสวิตช์ควบคุมระยะไกลอย่างแท้จริง ในรูปที่ 6 วงจรไฟฟ้าประกอบด้วยสวิตช์ที่เปิดและปิดเมื่อรีเลย์ทำงาน รีเลย์ถูกเปิดใช้งานโดยแกนแม่เหล็กซึ่งจะเปิดขึ้นเมื่อปิดสวิตช์ควบคุม เมื่อแกนถูกเปิดใช้งาน มันจะเพิ่มและปิดหน้าสัมผัสคู่หนึ่งในวงจรที่สอง ซึ่งมักจะเป็นวงจรไฟฟ้า กระแสไฟที่จำเป็นสำหรับรีเลย์มักจะต่ำกว่าวงจรไฟฟ้ามาก ดังนั้นจึงสามารถใช้แบตเตอรี่ได้
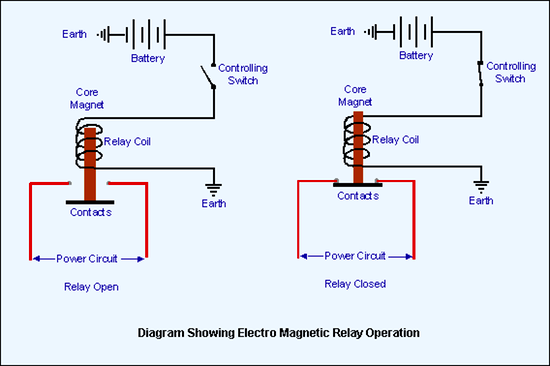
รูปที่ 6: แผนภาพรีเลย์คู่ที่แสดงว่าหากเปิดสวิตช์ควบคุม รีเลย์จะไม่ได้รับพลังงานและหน้าสัมผัสวงจรไฟฟ้าเปิดอยู่ หากปิดสวิตช์ควบคุมดังที่แสดงในแผนภาพด้านขวา รีเลย์จะเปิดขึ้นและแม่เหล็กจะเริ่มสูงขึ้นเพื่อปิดหน้าสัมผัสในวงจรไฟฟ้า
ดัชนี |
หัวรถจักรไฟฟ้า |
|
ปริมาณการจราจร mln. t-km |
||
ต้นทุนการดำเนินงานสัมพัทธ์ |
||
ค่าบำรุงรักษาและซ่อมแซมสัมพัทธ์ เมื่อใช้ลิฟต์แบบธรรมดาที่ทำงานระหว่างสองระดับ สามารถใช้รีเลย์ในแต่ละไซต์เพื่อเปิดมอเตอร์ลิฟต์เพื่อเลื่อนลิฟต์ยกขึ้นหรือลง บนรถไฟ สามารถวางสวิตช์ควบคุมไว้ที่ใดก็ได้บนรถไฟเพื่อเปิดใช้งานรีเลย์ที่ควบคุมกำลังของเครื่องยนต์ สามารถใช้หลักการเดียวกันนี้กับสวิตช์อื่นๆ ได้ เป็นต้น สำหรับให้แสงสว่างหรือความร้อน เป็นวิธีที่ปลอดภัยและง่ายในการส่งคำสั่งไปยังหลายยูนิตบนรถไฟ และเป็นพื้นฐานสำหรับการควบคุมหลายยูนิต |
||
เวลาที่ใช้ในการซ่อมแซมเป็นระยะ (ทุกๆ 3 เดือน) วัน |
||
จำนวนความเสียหายต่อ 1 หัวรถจักรไฟฟ้าต่อเดือน |
||
น้ำหนักเครื่องยนต์ฉุดกำลังเท่ากัน t |
||
สัมประสิทธิ์แรงเสียดทานที่เพิ่มขึ้นสัมพัทธ์ที่ความเร็ว km/h: ในสต็อกกลิ้งสมัยใหม่ รีเลย์จะถูกแทนที่ในหลาย ๆ แอพพลิเคชั่นโดยการควบคุมอิเล็กทรอนิกส์ที่เร่งการทำงาน ขจัดการเคลื่อนไหวทางกลที่จำเป็น และอนุญาตให้ย่อขนาดของระบบควบคุม ดังที่เราได้เห็นจากคำอธิบายข้างต้น รีเลย์จะต้องมีกระแสไฟที่ใช้กับมันตลอดเวลาที่จำเป็นต้องปิด หลีกเลี่ยง กระแสตรงสมมุติว่าใช้รีเลย์ควบคุมไฟ สวิตช์ควบคุมระยะไกลอีกประเภทหนึ่งใช้ คอนแทคเตอร์เป็นรีเลย์แบบสลักจริงๆ เรียกอีกอย่างว่า "สวิตช์ชั่วขณะ" สิ่งนี้ต้องการให้กระแสไฟเปิดเพื่อ "แรงบิด" เพื่อให้ทำงานได้ ในการปิดหน้าสัมผัสหลังจากสูญเสียการควบคุมกระแสไฟ หน้าสัมผัสของวงจรไฟฟ้าจะถูกยึดไว้โดยสลักทางกล เมื่อจำเป็นต้องเปิดวงจรไฟฟ้า สลักจะถูกปลดและหน้าสัมผัสจะเปิดขึ้น |
||
ปริมาณการใช้ทราย กก./มล. t-km |
||
วงจรคอนเวอร์เตอร์ (รูปที่ 13.12) ซึ่งพัฒนาโดยกองทัพอากาศ ใช้กับตู้รถไฟไฟฟ้า E-120, EA-3000 และ E1-17 ในตัวแปลงนี้ วงจรเรียงกระแสอินพุตร่วมกับตัวกรอง Lf - Sf จะทำให้แรงดันเอาต์พุตคงที่ กระแสไซน์ที่ใช้จากเครือข่ายเนื่องจากการมอดูเลตความกว้างพัลส์จะถูกแปลงที่เอาต์พุตเป็นกระแสที่มีส่วนประกอบคงที่และส่วนประกอบปัจจุบันมีรูปร่างไซน์สูงถึงสองเท่าของความถี่ ส่วนประกอบสุดท้ายจะไม่ผ่านโดยตัวกรองที่ปรับความถี่เป็นสองเท่าเมื่อเทียบกับความถี่ของแรงดันไฟฟ้า
ตัวแปลง VVS มีลักษณะเฉพาะโดยการเพิ่มจำนวนไทริสเตอร์ทั้งหมดเนื่องจากการมีอยู่ของไทริสเตอร์สวิตชิ่งซึ่งกำลังที่ติดตั้งซึ่งเท่ากับกำลังที่ติดตั้งของไทริสเตอร์หลักเนื่องจากการสลับกระแสหลายครั้งในช่วงระยะเวลาของการเปลี่ยนแปลง ด้วยเหตุนี้ ความสูญเสียในตัวแปลงจึงเพิ่มขึ้นอย่างเห็นได้ชัด ส่วนวงจรเรียงกระแสของตัวแปลงประกอบด้วยไทริสเตอร์ VS1 - VS4 และไดโอด VD1 - VD4 ชุดสวิตช์วงจรเรียงกระแสประกอบด้วยสวิตชิ่งไทริสเตอร์ สวิตชิ่งโช้ก LK และตัวเก็บประจุสวิตชิ่ง Sk
วงจรสวิตชิ่งของอินเวอร์เตอร์ประกอบด้วยสวิตชิ่งคาปาซิเตอร์ Sk และสวิตชิ่งโช้ก Lk
อินเวอร์เตอร์แรงดันไฟฟ้าถูกใช้เป็นอินเวอร์เตอร์ ซึ่งนอกจากการควบคุมความถี่แล้ว ยังสามารถควบคุมแรงดันไฟฟ้าในระหว่างการเร่งความเร็วได้ด้วยการแนะนำ PWM การมอดูเลตความกว้างพัลส์ของแรงดันไฟฟ้านั้นมาจากโหนดสวิตชิ่งสำหรับแต่ละเฟส ตัวอย่างเช่น สำหรับเฟส A ด้วยการใช้ไทริสเตอร์ความเร็วสูง จึงสามารถสลับขั้วแรงดันไฟฟ้าได้หลายครั้งในครึ่งระยะเวลาพร้อมกัน การควบคุมระยะเวลาของชีพจร สิ่งนี้ทำได้โดยสลับกระแสผ่านไทริสเตอร์สวิตชิ่งและการล็อคตามลำดับไทริสเตอร์หลัก
ในลิงค์กลางที่อินพุตของอินเวอร์เตอร์ ตัวกรอง Lφ - Sf รวมอยู่ด้วย ซึ่งออกแบบมาสำหรับความถี่สองเท่าของแหล่งจ่าย แรงดันไฟฟ้ากระแสสลับและตัวเก็บประจุกรอง Cf.
ตัวเหนี่ยวนำ Lc ใช้เพื่อลดแอมพลิจูดของฮาร์โมนิกที่สูงขึ้นของกระแสในระหว่างการเร่งความเร็วของรถไฟ ในตอนท้ายของการเร่งความเร็ว chokes จะลัดวงจรโดยหน้าสัมผัสของคอนแทคเตอร์ K1 - K3
เมื่อออกจาก แรงดันไฟฟ้าการมอดูเลตพัลส์แรงดันหยุดและแรงดันเฟสและรูปคลื่นกระแสกลายเป็นเรื่องปกติสำหรับอินเวอร์เตอร์แรงดันไฟ (ดูรูปที่ 13.11)
AEG บริษัท เยอรมันตะวันตกนำแนวคิดที่แตกต่างออกไปเมื่อสร้างเครื่องแปลงหัวรถจักรไฟฟ้าซึ่งไดอะแกรมแสดงในรูปที่ 13.13, ก. ที่นี่การควบคุมแอมพลิจูดของแรงดันไฟฟ้าในลิงค์วงจรเรียงกระแสและการควบคุมความถี่ในอินเวอร์เตอร์ปัจจุบันนั้นดำเนินการซึ่งไม่ต้องการการสลับไทริสเตอร์ซึ่งทำให้ตัวแปลงง่ายขึ้นอย่างมาก ไทริสเตอร์หลักสามารถทำหน้าที่ได้ช้า ไม่ต้องใช้ตัวเก็บประจุกรอง

รูปที่ 7: แผนภาพแสดงวิธีการควบคุมคอนแทคเตอร์ด้วยคอยล์สองตัว โดยแต่ละตัวมีสวิตช์ควบคุมของตัวเอง คอนแทคเตอร์ใช้กันอย่างแพร่หลายในรถไฟ และนี่เป็นตัวอย่างที่ดีสำหรับเราในการแสดงให้เห็นว่าการควบคุมแบบหลายหน่วยทำงานอย่างไรในทางปฏิบัติ
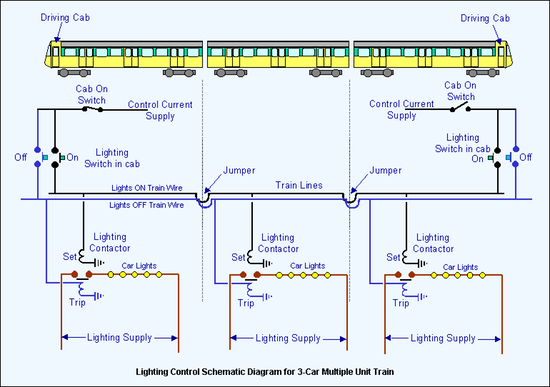
รูปที่ 8: แผนภาพนี้แสดงหลักการจัดการหลายหน่วยที่เกี่ยวข้องกับรถไฟ 3 คัน นี่เป็นตัวอย่างง่ายๆ ที่แสดงวิธีการเปิดและปิดไฟรถยนต์แต่ละคันโดยใช้คอนแทคเตอร์แบบไฟ คอนแทคเตอร์จะปิดลงเมื่อมีการจ่ายไฟให้คอยล์ "ติดตั้ง" หรือเปิดขึ้นพร้อมกับคอยล์ "ทริป" เพื่อปลดล็อกเมื่อจำเป็นต้องปิดไฟ

ข้าว. 13.11. รูปคลื่นของแรงดันเฟสและกระแสที่ไม่มีการมอดูเลตความกว้างพัลส์ของอินเวอร์เตอร์
ข้าว. 13.12. แผนผังวงจรไฟฟ้าของตัวแปลงหัวรถจักรไฟฟ้า E-120
อย่างไรก็ตาม ความจุของตัวเก็บประจุแบบสวิตชิ่งต้องมีนัยสำคัญ เนื่องจากวงจรสวิตชิ่งรวมค่าความเหนี่ยวนำของขดลวดมอเตอร์ฉุด เมื่อไทริสเตอร์ดีขึ้น อินเวอร์เตอร์ปัจจุบันสูญเสียข้อได้เปรียบเดิมไป 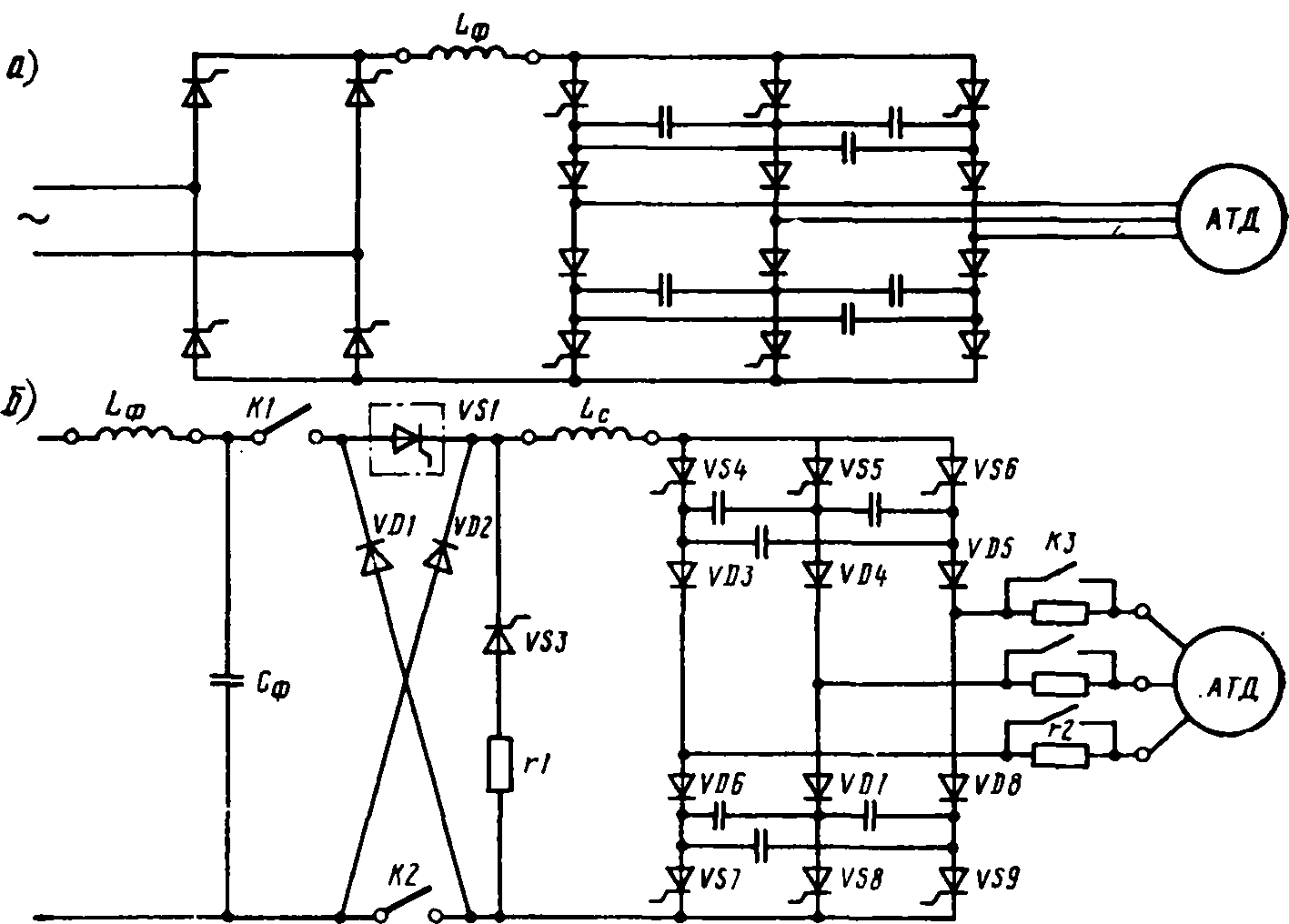
ข้าว. 13.13. วงจรแปลงสำหรับมอเตอร์ลากแบบอะซิงโครนัสที่มีลิงค์ DC (a) และไม่มีลิงค์ DC (b):
K1 - คอนแทคสวิตช์เบรก Cf - ตัวเก็บประจุกรอง; L - เครื่องปฏิกรณ์กรอง; Lc - เครื่องปฏิกรณ์ปรับให้เรียบ; VDI - ไดโอดเบรก; VD2 - ไดโอดย้อนกลับ; VSI - ไทริสเตอร์หลัก p2 - ไทริสเตอร์เบรก; P - ตัวต้านทานเบรก p2 - ตัวต้านทานเบรกในวงจรมอเตอร์
เมื่อ ERS ใช้พลังงานจากเครือข่าย DC ซีเมนส์ (เยอรมนี) ได้พัฒนาตัวแปลงที่แสดงในรูปที่ 13.13 ข. ประกอบด้วยอินเวอร์เตอร์ปัจจุบันและพัลส์เบรกเกอร์อินพุตที่ให้การควบคุมแรงดันไฟตรงที่ราบรื่น ในโหมดแรงขับ หน้าสัมผัส K1 - KZ จะปิดลง ตัวสับไทริสเตอร์ที่มีไทริสเตอร์หลัก VS1 ที่อินพุตซึ่งใช้แรงดันคงที่ที่ระดับคงที่โดยประมาณ แปลงอันหลังเป็นแรงดันคงที่แบบแปรผัน แรงดันไฟฟ้านี้ป้อนผ่านเครื่องปฏิกรณ์ปรับให้เรียบ Lc ของลิงค์ DC ระดับกลางไปยังอินเวอร์เตอร์ (ไทริสเตอร์ 4 - 6 และไดโอด VD3 - VD8) ซึ่งกระแสตรงจะถูกแปลงเป็นสามเฟสในรูปแบบของพัลส์สี่เหลี่ยมที่เลื่อนไป 120 °สำหรับแต่ละเฟส อินเวอร์เตอร์จะควบคุมความถี่ของกระแสไฟขาออก ในช่วงเริ่มต้นการทำงาน ที่ความถี่ต่ำของแหล่งจ่ายไฟของมอเตอร์ กระแสพัลส์จะถูกมอดูเลต อันเป็นผลมาจากการที่กระแสเฟสสเตเตอร์ได้รูปทรงสี่เหลี่ยมคางหมู
ในระบบหลายหน่วย ชุดอุปกรณ์บนรถไฟจะถูกควบคุมจากที่เดียว ในรูปที่ 8 คอนแทคเตอร์ไฟทั้งหมดในรถไฟเชื่อมต่อกับสายไฟ ในกรณีนี้หนึ่งสำหรับ "เปิด" และอีกอันสำหรับ "ปิด" เพื่อป้องกันการใช้ปุ่มควบคุมโดยไม่ได้รับอนุญาต วงจรที่สำคัญที่สุดในห้องโดยสารจะถูกแยกโดย "สวิตช์ควบคุม" หรือ "สวิตช์ห้องโดยสาร" นี่เป็นกุญแจและกุญแจจะออกให้เฉพาะคนขับหรือพี่เลี้ยงที่ผ่านการรับรองเท่านั้น หลักการเดียวกันกับที่ใช้คอนแทคเตอร์หรือรีเลย์ใช้กับระบบอื่นๆ ทั้งหมดในการควบคุมรถไฟ - การควบคุมการจราจร การควบคุมเบรก เครื่องทำความร้อน ประตู เครื่องปรับอากาศ เสียงประกาศสาธารณะ ฯลฯ
พารามิเตอร์ |
ประเภทของมอเตอร์ฉุดลาก |
|
กำลังไฟฟ้า kWt |
||
โมเมนต์ κΗ μ |
||
ความเร็วในการหมุนสูงสุด, แน่นอนว่าปัจจุบันสำหรับอุปกรณ์แต่ละอย่าง ยานพาหนะในกรณีนี้เมื่อส่องสว่างมาจากแหล่งที่แยกต่างหาก - ในรูปของแบตเตอรี่, เครื่องกำเนิดไฟฟ้า กระแสสลับ,อินเวอร์เตอร์หรือสายรถไฟฟ้า คุณจะหยุดรถจักรหนึ่งไม่ให้ขึ้นผิดทางได้อย่างไร? มันอยู่ในสายไฟและเรียบง่ายตามที่แสดงในภาพ ไดรฟ์ไฟฟ้าฉุดแบบอะซิงโครนัสบนรถยนต์รถไฟใต้ดิน กวดวิชา
|
||
น้ำหนัก (กิโลกรัม |
||
จำนวนเสา |
||
แรงดันเฟส V |
||
ความถี่ปัจจุบันของสเตเตอร์ Hz |
||
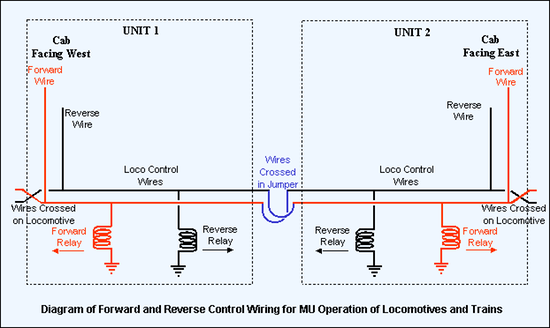
ความถี่ปัจจุบันของโรเตอร์ Hz เพื่อให้แน่ใจว่าทิศทางที่ถูกต้อง หัวรถจักรที่สองซึ่งเชื่อมต่อกับคันแรกจะเดินสายไฟไปมาในจัมเปอร์ หากหัวรถจักรที่สองหันหน้าไปในทิศทางตรงกันข้ามกับหัวรถจักรคันแรก ลวดกลับของมันจะมีพลังเพื่อให้หัวรถจักรวิ่งไปในทิศทางเดียวกับคู่ของมัน เพื่อให้แน่ใจว่าสิ่งนี้จะเกิดขึ้นเสมอ จัมเปอร์แบบหลายกล่องทั้งหมดจะต้องข้ามสายไปข้างหน้าและย้อนกลับ แต่คุณอาจถามว่าถ้าหัวรถจักรหันไปทางเดียวกันล่ะ? คุณไม่จำเป็นต้องมีสายไขว้ในจัมเปอร์ สายไขว้ในจัมเปอร์จะทำให้บ้าที่สองตรงข้าม ตอนนี้ ไม่ว่าเส้นทางรอบตู้รถไฟจะเชื่อมต่อกันในลำดับใด คำสั่งจะขับเคลื่อนอุปกรณ์ทั้งหมดไปในทิศทางเดียวกันเสมอ และคำสั่งย้อนกลับจะทำให้อุปกรณ์ทั้งหมดเคลื่อนที่ไปในทิศทางตรงกันข้าม |
||
อัตราทดเกียร์ |
||
เส้นผ่านศูนย์กลางภายนอก m |
||
ช่องว่างอากาศ mm |
||
ในโหมดเบรกไฟฟ้า สวิตช์เบรก K1 และ K2 จะเปิดขึ้น และเมื่อใช้ไทริสเตอร์ VS3 จะสามารถเชื่อมต่อตัวต้านทานเบรกได้ เมื่อเบรก เครื่องอะซิงโครนัสจะทำงานในโหมดเครื่องกำเนิดไฟฟ้า และอินเวอร์เตอร์ทำหน้าที่เป็นวงจรเรียงกระแสแบบควบคุม สิ่งนี้จะเปลี่ยนขั้ว แรงดันคงที่ Ud แต่ Id ทิศทางปัจจุบันยังคงเหมือนเดิม 
ข้าว. 13.14. แรงฉุดของหัวรถจักรไฟฟ้า E-120
ในการใช้แรงบิดในการเบรกที่ความเร็วใดๆ ของโรเตอร์มอเตอร์ฉุด จำเป็นต้องควบคุมกำลังเบรกโดยการเปลี่ยนแรงดันไฟตรงและกระแสไฟ ฟังก์ชันเหล่านี้ดำเนินการโดยเบรกเกอร์ DC ซึ่งเมื่อหน้าสัมผัสของสวิตช์เบรกเปิดอยู่ ไม่อนุญาตให้มีการไหลของพลังงานจากเครือข่ายหน้าสัมผัสผ่าน ในโหมดนาฬิกา เครื่องบดสับจะทำงานเป็นระยะ ไฟฟ้าลัดวงจรวงจรผ่านไดโอดเบรก VD1 ในเวลาเดียวกัน ในช่วงเวลาของสถานะการนำไฟฟ้าของผู้ขัดขวาง กระแสในเครื่องปฏิกรณ์ Lc ของลิงค์กลางจะเพิ่มขึ้น และในช่วงระยะเวลาของสถานะไม่นำไฟฟ้า กระแสตรงที่ลดลงจะถูกส่งไปยังเครือข่ายการติดต่อ , ปิดผ่านไดโอด VD1 และ VD2 (การเบรกแบบสร้างใหม่) หรือเมื่อไม่มีตัวรับพลังงานที่สร้างใหม่ กระแสจะไหลเข้าสู่ตัวต้านทานการเบรกหลังจากที่ไทริสเตอร์เบรกถูกกระตุ้น (การเบรกแบบรีโอสแตติก) เพื่อรักษาเสถียรภาพของโหมดพักฟื้นเมื่อเบรกด้วย ความเร็วสูงใช้ตัวต้านทาน จำกัด 2 ซึ่งในโหมดการทำงานอื่น ๆ จะถูกแบ่งโดยคอนแทคไฟฟ้าลัดวงจร มีการติดตั้งตัวต้านทานระหว่างอินเวอร์เตอร์และมอเตอร์เพื่อป้องกันไม่ให้อินเวอร์เตอร์สัมผัสกับแรงดันไฟฟ้าเกิน
การออกแบบมอเตอร์ฉุดหัวรถจักรไฟฟ้า E-120 และ E-1200 ได้รับการทดสอบโดยการใช้งานในระยะยาว พารามิเตอร์ของเครื่องเหล่านี้แสดงไว้ในตาราง 13.6.
มอเตอร์ฉุดลากแบบอะซิงโครนัสทั้งหมดที่กองทัพอากาศใช้มีการออกแบบสี่ขั้วซึ่งเกิดจากความจำเป็นในการมอดูเลตพัลส์แรงดันไฟฟ้าในลิงค์อินเวอร์เตอร์เนื่องจากสิ่งนี้จะลดความถี่ในการทำงานให้สูงสุด แรงดันเฟสมอเตอร์และสามารถลดความถี่สัญญาณนาฬิกาของมอดูเลตได้ ซึ่งจะช่วยลดการสูญเสียจากสวิตชิ่ง
มอเตอร์ฉุดลากมีความเร็วในการออกแบบสูง เนื่องจากไม่มีข้อจำกัดเกี่ยวกับการสะสมกระแสไฟและความแข็งแรงของโรเตอร์ ทำให้สามารถลดแรงบิดที่คำนวณได้โดยใช้แรงฉุดลากที่ขอบล้ออย่างมากเนื่องจากอัตราทดเกียร์สูง
ควรสังเกตว่าการใช้แบริ่งยึดมอเตอร์กับสมอเรือที่ล้ำหน้ามากกับมอเตอร์แบบอะซิงโครนัสการฉุดลาก ซึ่งทำให้สามารถรับรู้ความเร็วสูงสุดถึง 3600 รอบต่อนาทีในช่วงเวลาที่สำคัญได้ หนึ่งใน คุณสมบัติการออกแบบคือการใช้เครื่องแยกสารโพลีเมอร์ ขอบคุณ ความถี่สูงมอเตอร์ฉุดหมุนมีมวลค่อนข้างเล็กโดยใช้วิธีการระบายความร้อนด้วยอากาศตามปกติ
ข้าว. 13.14 อธิบายการออกแบบระบบขับเคลื่อนฉุดลาก ก่อนอื่น ให้ความสนใจกับเฟืองก้างปลาซึ่งช่วยให้คุณสามารถส่งกำลังขนาดใหญ่ที่มีความกว้างของเฟืองน้อยที่สุด การถ่ายโอนแรงจากเพลากลวงไปยังล้อจะดำเนินการโดยข้อต่อยางยืดแบบข้อต่อ คล้ายกับระบบส่งกำลังประเภทอัลสตอม
โดยทั่วไป แรงฉุด มอเตอร์แบบอะซิงโครนัสและระบบส่งกำลังค่อนข้างสมบูรณ์แบบ ซึ่งแสดงให้เห็นอย่างชัดเจนถึงศักยภาพที่ดีในการพัฒนาการออกแบบระบบขับเคลื่อนฉุดลาก
อะซิงโครนัส มอเตอร์กรงกระรอกง่ายมากในการออกแบบ มีความน่าเชื่อถือสูงในการดำเนินงาน ต้นทุนการผลิตและการซ่อมแซมต่ำ ขนาดโดยรวมและน้ำหนักเมื่อเทียบกับมอเตอร์กระแสตรง ไม่ต้องการการดูแลเป็นพิเศษ ยกเว้นการสังเกตแบริ่ง ฉนวน การเชื่อมต่อหน้าสัมผัส และมีคุณสมบัติการยึดเกาะที่น่าพอใจ ด้วยการเพิ่มความเร็วของโรเตอร์เหนือซิงโครนัส (speed สนามแม่เหล็ก) สลับไปยังโหมดตัวสร้างโดยอัตโนมัติโดยไม่ต้องเปลี่ยน ซึ่งทำให้ง่ายขึ้น แผนภาพการเดินสายไฟเมื่อใช้เบรกไฟฟ้า
นอกจากข้อดีแล้ว มอเตอร์ไฟฟ้าแบบอะซิงโครนัสยังมีข้อเสียหลายประการที่ทำให้ใช้งานกับสต็อกกลิ้งได้ยาก ลักษณะการสตาร์ทของมอเตอร์ด้วย โรเตอร์กรงกระรอกที่ความถี่กระแสคงที่ไม่ได้ให้อัตราเร่งสูงเนื่องจากแรงบิดเริ่มต้นค่อนข้างเล็กและเพิ่มขึ้นเป็นค่าสูงสุดด้วยความเร็วที่เพิ่มขึ้น การควบคุมความเร็วของมอเตอร์ทำได้ยาก ช่องว่างอากาศระหว่างสเตเตอร์และโรเตอร์มีขนาดเล็กมาก การเพิ่มช่องว่างจะเพิ่มมวลและเพิ่มขนาดของเครื่องยนต์ การสตาร์ทมอเตอร์ไฟฟ้าด้วยโรเตอร์กรงกระรอกนั้นสัมพันธ์กับการสูญเสียพลังงานจำนวนมากและความร้อนของขดลวด
ความก้าวหน้าของเทคโนโลยีเซมิคอนดักเตอร์กำลังไฟฟ้าและเครื่องมือระบบอัตโนมัติทำให้สามารถสร้างตัวแปลงความถี่คงที่ที่เชื่อถือได้และประหยัดด้วยขนาดและน้ำหนักที่ยอมรับได้สำหรับหัวรถจักรดีเซล นี้เป็นเพราะ การใช้งานจริงในรถจักรดีเซล เกียร์ AC พร้อมมอเตอร์ไฟฟ้ากรงกระรอกแบบอะซิงโครนัส โดยเฉพาะอย่างยิ่งสำหรับหัวรถจักรดีเซลที่มี
ข้าว. 3.23. แรงฉุด มอเตอร์ไฟฟ้าแบบอะซิงโครนัส ED-900 (ส่วนตามยาวและตามขวาง):
1 - เพลา; 2- เครื่องซักผ้า; 3- แบริ่งลูกกลิ้ง; 4 - โล่แบริ่ง; 5- บูช; 6 - แกนโรเตอร์; ขดลวด 7 สเตเตอร์; ฉันเป็นแกนหลักของสเตเตอร์ 9 ตัว (โครงกระดูก); 10 เคสป้องกัน; หนึ่ง/- ขดลวดลัดวงจรโรเตอร์; 12-- ร่องของแกนโรเตอร์ 13- ร่องของแกนสเตเตอร์; 14 - กระแสน้ำ; 15 ท่อระบายอากาศ; 16- กล่องแคลมป์; 17 - รูระบายอากาศในแกนกลางของโรเตอร์ด้วยเครื่องยนต์ดีเซลที่มีกำลังมากกว่า 2940 กิโลวัตต์ในส่วนเมื่อใช้มอเตอร์ฉุด DC จะต้องทำให้การออกแบบซับซ้อนขึ้นอย่างมาก (ใช้เฟรมสำเร็จรูปหรือเชื่อม, ขดลวดชดเชย ฯลฯ . หรือเพิ่มจำนวนเพลา) โรงงานคาร์คอฟ "Electrotyazhmash" พวกเขา Lenin, โรงงานหัวรถจักรดีเซล Voroshilovgrad ตั้งชื่อตาม V.I. การปฏิวัติเดือนตุลาคมและโรงงานเครื่องกลไฟฟ้าทาลลินน์ Kalinin สร้างรถจักรดีเซลรุ่น TE120 ที่มีกำลัง 2940 กิโลวัตต์พร้อมระบบส่งกำลังไฟฟ้ากระแสสลับซึ่งใช้มอเตอร์ฉุดกรงกระรอกแบบอะซิงโครนัส ED-900 (รูปที่ 3.2.3) พร้อมระบบกันสะเทือนโครงรองรับ (ดูตารางที่ 3.4)
ในเครื่องฉุดลากไฟฟ้ากระแสสลับ วงจรแม่เหล็กที่ทำจากแผ่นเหล็กไฟฟ้าไม่สามารถทำหน้าที่เป็นกรอบของเครื่องพร้อมกันได้ (รูปทรงมีความเสถียรไม่เพียงพอ) ดังนั้นจึงได้รับการแก้ไขในตัวเรือนสเตเตอร์ ความหนาของผนังของตัวเครื่อง (โครงกระดูก) พิจารณาจากสภาวะของความแข็งแรงและการเชื่อมต่อกับส่วนอื่น ๆ ของเครื่อง: เกราะป้องกันแบริ่ง ชิ้นส่วนท่อลม ฯลฯ
ส่วนประกอบหลักของมอเตอร์: สเตเตอร์ โรเตอร์ และส่วนปิดท้ายพร้อมตลับลูกปืน สเตเตอร์ประกอบด้วยตัวเรือน 9, แกน 8, ขดลวด 7 และเครื่องซักผ้าแรงดัน ตัวเครื่องหล่อกลมมีซี่โครงที่ทำให้แข็งในแนวแกนซึ่งสร้างช่องสำหรับทางผ่านของอากาศเย็นสเตเตอร์ เฟรมมีสองช่องสำหรับอากาศเข้าและออก ประตูทางออกติดตั้งปลอกป้องกันที่ป้องกันไม่ให้น้ำเข้าไปในเครื่องยนต์ (เมื่อล้างหัวโบกี้)
แพ็คเกจสเตเตอร์ประกอบขึ้นจากแผ่นเหล็กไฟฟ้าบนปริซึมพิเศษและยึดด้วยเครื่องซักผ้าแรงดัน ขดลวดสเตเตอร์ (ขดลวดสองชั้น) วางอยู่ในร่องของแกนสเตเตอร์และยึดด้วยลิ่มฉนวน ส่วนหน้าของขดลวดสเตเตอร์ได้รับการแก้ไขด้วยวงแหวนรูปกรวย สเตเตอร์ของบาดแผลหันไปตามปริซึมและกดเข้าไปในตัวเรือน ฉนวนจากตัวเรือนขดลวดสเตเตอร์ทำจากฟิล์มโพลีอะมายด์ โรเตอร์ประกอบด้วยเพลา 1, บูช (แกน) 5, แกน 6" และขดลวด 1/
บูชในรูปแบบของท่อถูกกดลงบนเพลาและกดแกนโรเตอร์ที่ประกอบจากแผ่นเหล็กไฟฟ้าลงไป ขดลวดลัดวงจรทำในรูปแบบของ "กรงกระรอก" โดยเติมร่องและปลายแกนด้วยอลูมิเนียมอัลลอยด์ ช่องว่างอากาศระหว่างสเตเตอร์และ โรเตอร์ I,G> มม. การออกแบบชุดแบริ่งคล้ายกับชุดแบริ่งของมอเตอร์ฉุด DC
EXCITORS, เครื่องกำเนิดไฟฟ้าเสริม และมอเตอร์ไฟฟ้า