Обмотка короткозамкнутого дроту складається з m-частин. Зсув фаз між ЕРС індуктивного обертового магнітного поля статора в двох сусідніх стрижнях, дорівнює
р – кількість пар полюсів двигуна;
 2 – число витків у кожній фазі.
2 – число витків у кожній фазі.
Нехай ланцюг ротора розімкнуто, тобто. Струм у ній відсутня, на ротор не діють електромагнітні сили і він нерухомий. При нерухомості ротора, частота ЕРС індуктованої в його обмотці, дорівнює частоті струмів в ланцюзі обмоток статора.
Проблеми у біологічному очищенні стічних вод. Тому стає все більш актуальною розробка більш досконалої та ефективної системи очищення стічних вод. У біологічному процесі повітродувки продувають повітря в аераційні басейни, щоб наситити киснем мільйони бактерій аеробних, які руйнують компоненти органічної стічної води.
Звичайне відцентрове повітродувка використовує асинхронний двигун з механічною коробкою передач і підшипниками з мастильним мастилом, які зазвичай мають великі втрати потужності та високий знос, що також призводить до високих експлуатаційних витрат. Крім того, ці повітродувки зазвичай вимагають 50 або більше відсотків загальних потреб енергії станції очищення стічних вод. Фактично споживання енергії становить до 80 відсотків вартості життєвого циклу вентилятора. Таким чином, первісна інвестиційна вартість пристроїв значно нижча від загальної вартості володіння.
f – частота мережі, 50 Гц;
Якщо ротор обертати з частотою n 2 , слідом за магнітним полем статора, що обертається, то частота ЕРС індуктованої обмотки зменшиться і стане рівною
Якщо ланцюг ротора замкнути, то струми у ньому утворюють:
1) Багатофазну систему, з числом фаз m 2 =N, у разі короткозамкнутого ротора.
В результаті збільшення витрат на електроенергію та розвитку технологій приводу відбулося технологічне зрушення у бік більш ефективних відцентрових компресорів зі змінною швидкістю обертання з прямим приводом. Ротор веде себе подібно до компасу, який вирівнюється з електромагнітним полем, створеним статором. Ротор обертається з тією ж швидкістю, що і магнітне поле статора, що обертається; тобто обертання валу синхронізується із поточною частотою. Рідкоземельні постійні магнітисидять безпосередньо на валу та утримуються втулкою з вуглецевого волокна.
2) Трифазну систему, з числом фаз m 2 =3, у разі фазного ротора => струми в обмотці ротора аналогічні струмам в обмотках статора, повинні збуджувати магнітне поле, що обертається.
34. Робоче магнітне поле, що обертається, асинхронного двигуна
n отн. - Частота обертання цього поля, щодо ротора.

Швидкість контролюється приводом зі змінною швидкістю. Концепція прямого приводу з крильчаткою, встановленої безпосередньо на валу двигуна, робить передачу та інші пов'язані з нею механічні компоненти звичайних конструкцій зайвими та забезпечує не тільки велику експлуатаційну безпеку, але й значно скорочує обслуговування.
Активний магнітний підшипник є сучасним мехатронним пристроєм для безконтактного монтажу обертового або нерухомого валу в магнітному полі. Положення валу підтримується додатком керованих електромагнітних сил у радіальному та осьовому напрямках до ротора.
Т.к. сам ротор обертається в тому ж напрямку з частотою n 2 то його поле обертається в просторі з частотою, що дорівнює
Тобто. поле ротора обертається синхронно з полем статора, це характерною умовою повної передачі енергії від статора до ротора.
Складаючись, обертове магнітне поле статора і ротора, утворюють робоче магнітне поле, що обертається асинхронного двигуна, яке служить так само сполучною ланкою, між обмотками статора і ротора, як і змінне магнітне поле в сердечнику трансформатора, що передає енергію від первинної обмотки до вторинної обмотки. Саме це, робоче поле, необхідно знати для аналізу процесів у ланцюгах статора та ротора.
Система має електромеханічні та електронні компоненти. Рішення, розроблене для застосування нагнітача, містить два ідентичні вузли підшипника-статора, які можуть прикладати як радіальні, так і осьові зусилля до валу. Кожен блок містить сам склад, датчики положення, датчики температури та приймальні бункери. Кодери вимірюють радіальне та осьове зміщення валу з точністю менше одного мікрометра. Монтажні опори - це запобіжний пристрій підтримки валу у стані спокою; проте вони неактивні при включенні магнітних підшипників.
35. Механічна характеристика асинхронного двигуна
Для стійкої роботи двигуна, важливо, щоб автоматично встановилася рівновага крутного та гальмівного моментів, зі збільшенням навантаження на валу двигуна, збільшиться гальмівний момент, відповідно повинен зростати і крутний момент
У цьому додатку радіальний проміжок або магнітний повітряний проміжок між статором і ротором становить близько 500 мкм. Через конструкцію немає контакту та зносу компонентів; мастило не потрібно. Електронний магнітний підшипник в основному складається з цифрового сигнального процесора, головного мозку системи та підсилювачів потужності, які постачають магнітні підшипники. електричним струмомдля генерації магнітного поля.
Жорсткість та демпфування підшипників оптимізовано з використанням складних математичних алгоритмів, що забезпечують стабільну роботу машини у різних умовах експлуатації. Таке активне управління принципово відрізняється від звичайних підшипників і має багато переваг, таких як захист від вібрації та дисбалансу.
Р хутро – механічна потужністьна вал двигуна;
2
– кутова швидкістьротора
Це врівноважування моментів у працюючого двигуна здійснюється наступним чином, при збільшенні навантаження на валу, гальмівний момент виявляється більше крутного моменту, внаслідок чого, частота обертання ротора зменшується, ковзання зростає. Підвищення ковзання викликає збільшення крутного моменту. Рівновага моментів відновлюється при зростанні ковзання.
У разі збою живлення система оснащена запобіжним джерелом живлення підтримки магнітного підшипника. У разі збою живлення двигун перемкнеться в режим генератора, який буде приводити в дію магнітні підшипники доти, доки вал не досягне низької швидкості і не скотиться на упор на шарикопідшипниках, не пошкодивши систему.
Залежно від потужності двигуна або необхідного охолодження, корпус двигуна призначений для повітряного або водяного охолодження. Компоненти охолодження мають бути надані клієнтом. Привід зі змінною швидкістю може бути отриманий від авторизованих виробників. Обсяг поставки варіюється: від основних компонентів до готових блоків клієнт може використовувати гнучкість в дизайні, або переваги одноразової доставки.


R 2 - Активний опір;
X рас.2 - індуктивний розсіяний опір.

Вища ефективність при номінальному та частковому навантаженні - на 10 відсотків більше, ніж у звичайних двигунів. Більше тривалий термін служби. Зниження виробничих витратзавдяки більш компактній конструкції. Нижній рівень шуму. Відповідність чинним нормам.
- Вища надійність системи.
- Не потребує технічного обслуговування.
- Потужне діагностичне програмне забезпечення.
- Оптимізоване керування процесом.

 -коефіцієнт потужності.
-коефіцієнт потужності.
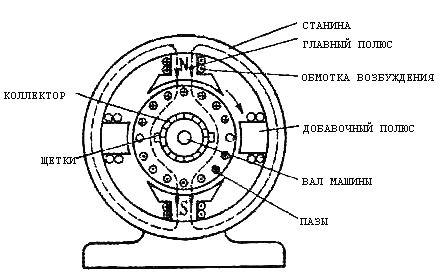
36) Пристрій і принцип дії, сфери застосування електричних машин постійного струму (мпт)
МПТ складається з нерухомої частини, в якій збуджується головне магнітне поле, і частини, що обертається, в якій індуктується е.д.с. Струми від цієї е.р.с., взаємодіючи з головним магнітним полем, створюють момент (у руховому режимі він є обертовим, у генераторному – гальмівним).
Тематичне дослідження Станція очищення стічних вод у Франції для міста з кількістю тисяч жителів, включаючи місцеву промисловість, була оснащена чотирма роторними повітродувками потужністю 80 кВт. Однак вони призвели оператора до багатьох труднощів: часті збої, високе енергоспоживання, високий рівеньшуму, процедурні проблеми та ін. ще примітнішим було зниження споживання енергії. Модернізація до більш ефективних вентиляторів з магнітним підшипником дозволила знизити амортизацію менш як за два роки і лише через економію енергії.
Нерухлива частина складається із станини та полюсів, які до неї кріпляться. Полюси поділяються на основні, у яких збуджуються основний магнітний потік, і додаткові, які встановлюються з метою поліпшення комутації машини.
Принцип дії
Це дослідження ілюструє стратегію скорочення експлуатаційних витрат. Тут розумний вибір правильного обладнання спричинив значну економію. Ці повітродувки призначені для великих резервуарів для аерації, необхідних для забезпечення міських центрів, що швидко ростуть, чистою водою.
Попит у Китаї величезний, з кожним роком будуються сотні нових очисних споруд. У дванадцятому п'ятирічному плані очікується $380 млрд. Більшість рухів, які ми виробляємо машинами, фактично є лінійними. Транспортування, наприклад, штампування, пресування та нагнітання або направляюча нитка в автоматичному ткацькому верстаті - це процеси, що складаються з прямих рухів. Тим не менш, привід для наших машин поставляється роторними двигунамияк обертальний рух, яке спочатку необхідно механічно перетворити на переклади, внаслідок чого, звичайно, енергія втрачається.
Авто постійного струмуможе працювати у двох режимах: руховому та генераторному, залежно від того, яку енергію до неї підвести - якщо електричну, то електрична машина працюватиме в режимі електродвигуна, а якщо механічну - працюватиме в режимі генератора. Однак електричні машини, як правило, призначені заводом-виробником для одного певного режиму роботи - або в режимі генератора, або електродвигуна.
У разі бензинового двигуна або парового двигуна навіть прямолінійний рух, хід поршня, спочатку перетворюється на поворот, який у багатьох застосуваннях потім знову трансформується в лінійні процеси, в кінцевому підсумку також в транспортних засобівах, завдання яких полягає у продовженні у площині.
Тільки нещодавно технологія прагне зберегти зміни руху та, таким чином, одночасно переміщати деталі машин. Лайтвейт використовує принцип індукційного або трифазного двигунадля горизонтальних рухів Взагалі, асинхронний двигун складається з так званого статора, нерухомого кільця електромагнітів і ротора, барабана з мідних стрижнів, який з можливістю обертання підвішений у центрі кільця. Електромагніти статора живляться трифазним струмомтаким чином, що магнітне поле, що обертається, створюється змінним фазовим. змінним струмомщо захоплює ротор і, отже, також обертає його.
Галузь застосування
Електричні машини постійного струму використовують як генератор, так і як двигун. Найбільшого застосування отримали двигуни постійного струму:
Вони широко використовуються для приводу підйомних засобів як кранові двигуни.
Приводом транспортних засобів як тягові двигуни.
В асинхронному двигуні немає електричного з'єднанняміж рухомою частиною та нерухомою частиною. Ця перевага в порівнянні з іншими електродвигунами, усунення подрібнювачів або щіток, асинхронний двигун є популярністю в цій галузі.
Інженери в Манчестері тепер розрізали кільце статора, так би мовити, і виклали його як смугу літака. Тепер магнітне поле більше не обертається, але воно мігрує з одного кінця смуги на інший, і шматок міді, який подається до цього поля, рухається вперед. Замість мідної деталі конвеєрна стрічка із гнучкого металу може проходити смугою статора. Лайтвейт вже практично випробував такі конвеєрні стрічки; однак вони стають цікавішими лише тоді, коли їхня швидкість становить понад 20 кілометрів на годину.
Для приводу пристроїв автоматики.
Для приводу прокатних станів.
Для приводу штатних витягів.
Обмотка короткозамкнутого ротора складається з N стрижнів. Між ЕРС, індукованими магнітним полем статора, що обертається, в двох сусідніх стрижнях, зсув фаз дорівнює 360° p/N. Можна вважати, що число фаз короткозамкнутого ротора дорівнює числу стрижнів, m 2 =N,а число витків у кожній фазі w 2 = 1/2.
Припустимо, що напрям струму протікає в нижній фазовій групі в статорі. Потім магнітне поле залишає статор як у верхній, так і нижній фазових групах; кожен із них буде магнітним північним полюсом. Магнітний потік у цій машині повинен повертатися до статора між двома фазовими групами, створюючи кілька послідовних південних магнітних полюсів. Зверніть увагу, що статор має чотири магнітні полюси; удвічі більше, ніж у мене раніше. Ротор у двигуні, подібний до цього, являє собою клітину, так як ротор сепаратора завжди має стільки полюсів, що полюси мають статор і тому можуть бути адаптовані при зміні числа полюсів у статорі.
Аналогічно ланцюг фазного ротора є трифазною системою. m 2 =3з числом витків w 2у кожній фазі. Тут і надалі всі величини, що відносяться до фази ротора, відзначатимуться індексом 2, а відносяться до фази статора - індексом 1.
Приймемо спочатку, що ланцюг ротора розімкнуто, тобто. Струм у ній відсутня, на ротор не діють електромагнітні сили і він нерухомий. У цьому випадку магнітне поле машини являє собою магнітне поле статора, що тільки обертається.
Коли двополюсний двигун підключений для роботи з чотирма полюсами, результуючий максимальний момент, що крутить, асинхронного двигуна може бути таким же, як і раніше, наполовину його попереднім значенням або подвоїти його попереднє значення, залежно від того, як розміщені обмотки статора. На рис. 7-41 показані можливі з'єднання статора та їх вплив на криву крутного моменту. Основним недоліком методу послідовних полюсів зміни швидкості є те, що швидкості повинні мати відношення 2: традиційним методом подолання цього недоліку було використання декількох статорних статорів з різною кількістю полюсів і одночасне включення тільки однієї групи.
При нерухомому роторі індуктованої в його обмотці ЕРС дорівнює частоті fструмів у ланцюзі статора. Якщо ротор обертати із частотою nслідом за обертовим полем статора, то частота індуктованої в його обмотці ЕРС зменшиться. Цю частоту f 2можна визначити з виразу n 1 = f · 60/p, у якому замість частоти обертання поля статора n 1потрібно підставити різницю n 1 - n, т.к. магнітне поле статора, що обертається, перетинає витки обмотки ротора тільки внаслідок того, що частота його обертання nменше, ніж поля статора n 1: f 2 = p(n 1 -n)/60.
На жаль, багатомоторні статори збільшують вартість двигуна і використовуються лише у разі нагальної потреби. Поєднання узгодженого методу полюсів із безліччю обмотувальних статорів може побудувати асинхронний двигун із чотирма швидкостями.
Управління швидкістю, змінюючи частоту лінії. Швидкість синхронного двигуна у номінальних умовах відома як базова швидкість. Якщо використовується керування зі змінною частотою, швидкість двигуна можна регулювати вище або нижче базової швидкості. Регулятор змінної частоти правильно спроектованого асинхронного двигуна може бути дуже гнучким. Ви можете контролювати швидкість асинхронного двигуна в діапазоні від 5% від базової швидкості до подвійної базової швидкості. Тим не менш, важливо підтримувати певні обмеження на напругу і момент двигуна, що крутить, при зміні частоти, щоб переконатися, що операція безпечна.
Якщо тепер ланцюг ротора замкнути, то струми в ньому утворюють багатофазну систему m 2 =Nфазами у разі короткозамкнутого ротора та з m 2 =3, тобто. трифазну у разі фазного ротора. Отже, струми в обмотці ротора аналогічно струмам в обмотці статора повинні збуджувати магнітне поле, що обертається. Частоту обертання nвід цього поля щодо ротора можна визначити, користуючись загальним виразом частоти обертання багатополюсного поля n 1 = f · 60/p: nотн = f 2 ·60/p.
Т.к. сам ротор обертається в тому ж напрямку із частотою n, то його поле обертається у просторі з частотою nотн + n = (n 1 - n) + n = n 1, тобто. поле ротора обертається синхронно із полем статора.
Т.о., поля статора і ротора, що обертаються, по відношенню один до одного залишаються нерухомими, що є характерною умовою повної передачі енергії від статора до ротора. Складаючись, магнітні поля статора і ротора, що обертаються, утворюють робоче обертове магнітне поле асинхронного двигуна. Робоче обертове поле ас.дв. Служить такою ж сполучною ланкою між обмотками статора і ротора, як і змінне магнітне поле в магнітопроводі трансформатора, що передає енергію від первинної до вторинної обмотки.
Надалі замість терміна робоче магнітне поле, що обертаєтьсябудемо користуватися скороченим - магнітне поле, що обертаєтьсяас.дв.
Розрізняють кілька режимів роботи ас.дв.: нормальний режим, що відповідає номінальному ковзанню ротора s=sном при номінальній напрузі U 1 =U 1ном і струмі I 1 =I 1ном мережі живлення; робочий режим, при якому напруга мережі живлення близька до номінального значення або дорівнює йому, U 1 ≈U 1ном, а навантаження двигуна визначається гальмівним моментом на валу при ковзанні s≤sном і струмі I 1 =I 1ном; режим пуску двигуна в хід, що виникає при підключенні напруги мережі живлення і нерухомому роторі s=1.
Режим роботи всіх фаз статора однаковий. Те саме стосується фаз ротора. Тому аналіз роботи ас. можна вести на одну фазу, представивши одну її обмотку одним витком.