Energetinės charakteristikos judesiai įvedami remiantis koncepcija mechaninis darbas arba jėgos darbas. Atliktas darbas nuolatinė jėga F, yra fizikinis dydis, lygus jėgos ir poslinkio modulių sandaugai, padaugintai iš kampo tarp jėgos vektorių kosinuso F ir poslinkis S:
Darbas yra skaliarinis dydis. Jis gali būti teigiamas (0° ≤ α < 90°), так и отрицательна (90° < α ≤ 180°). At α = 90° jėgos atliktas darbas lygus nuliui. SI sistemoje darbas matuojamas džauliais (J). Džaulis prilygsta darbui atliekama 1 niutono jėga per 1 metro poslinkį jėgos kryptimi.
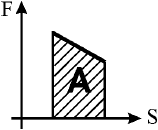
Jei jėga keičiasi laikui bėgant, norėdami rasti darbą, jie sudaro jėgos priklausomybės nuo poslinkio grafiką ir randa figūros plotą po grafiku - tai yra darbas:
Jėgos, kurios modulis priklauso nuo koordinatės (poslinkio), pavyzdys yra spyruoklės tamprumo jėga, kuri atitinka Huko dėsnį ( F extr = kx).
Galia
Jėgos per laiko vienetą atliktas darbas vadinamas galia. Galia P(kartais vadinamas N) yra fizikinis dydis, lygus darbo santykiui Aį laiko tarpą t per kurį šis darbas buvo baigtas:
Ši formulė apskaičiuoja vidutinė galia , t.y. galia, paprastai apibūdinanti procesą. Taigi, darbą taip pat galima išreikšti galia: A = Pt(jeigu, žinoma, nėra žinoma darbo galia ir laikas). Galios vienetas vadinamas vatu (W) arba 1 džauliu per sekundę. Jei judesys yra vienodas, tada:
![]()
Pagal šią formulę galime apskaičiuoti momentinė galia(galia tam tikru laiku), jei vietoj greičio formulėje pakeičiame momentinio greičio reikšmę. Kaip sužinoti, kokią galią skaičiuoti? Jei užduotis reikalauja galios tam tikru momentu arba tam tikru erdvės tašku, ji laikoma momentine. Jei klausiate apie galią per tam tikrą laikotarpį arba kelio atkarpą, ieškokite vidutinės galios.
Efektyvumas – koeficientas naudingas veiksmas , yra lygus naudingo darbo ir sunaudotos naudingosios galios santykiui:

Koks darbas naudingas, o kas išleidžiama, sprendžiama iš būklės konkreti užduotis per loginį samprotavimą. Pavyzdžiui, jei kranas atlieka darbą pakeldamas krovinį į tam tikrą aukštį, tada krovinio kėlimo darbas bus naudingas (nes kranas buvo jam sukurtas), o krano elektros variklio atliktas darbas bus išeikvotas.
Taigi, naudinga ir išeikvota galia neturi griežto apibrėžimo ir yra randama loginiu samprotavimu. Kiekvienoje užduotyje mes patys turime nustatyti, koks šioje užduotyje buvo darbo tikslas (naudingas darbas ar galia), o koks viso darbo atlikimo mechanizmas ar būdas (išeikvota galia ar darbas).
Bendru atveju efektyvumas parodo, kaip efektyviai mechanizmas paverčia vienos rūšies energiją kita. Jei galia keičiasi laikui bėgant, darbas randamas kaip figūros plotas po galios ir laiko grafiku:

Kinetinė energija
Vadinamas fizikinis dydis, lygus pusei kūno masės ir jo greičio kvadrato sandaugos kinetinė kūno energija (judesio energija):
Tai yra, jei automobilis, kurio masė 2000 kg juda 10 m/s greičiu, tada jo kinetinė energija lygi E k \u003d 100 kJ ir gali dirbti 100 kJ. Šią energiją galima paversti šiluma (kai automobilis stabdo, įkaista ratų padangos, kelias ir stabdžių diskai) arba gali būti panaudota deformuojant automobilį ir kėbulą, su kuriuo susidūrė automobilis (avarijos metu). Skaičiuojant kinetinę energiją, nesvarbu, kur automobilis juda, nes energija, kaip ir darbas, yra skaliarinis dydis.
Kūnas turi energijos, jei gali dirbti. Pavyzdžiui, judantis kūnas turi kinetinę energiją, t.y. judesio energiją ir gali atlikti darbą, kad deformuotų kūnus arba suteiktų pagreitį kūnams, su kuriais įvyksta susidūrimas.
Fizinė kinetinės energijos prasmė: kad kūnas ilsėtųsi su mase m pradėjo judėti dideliu greičiu v reikia atlikti darbą, lygų gautai kinetinės energijos vertei. Jei kūno masė m juda greičiu v, tada norint jį sustabdyti, reikia atlikti darbą, lygų jo pradinei kinetinei energijai. Stabdymo metu kinetinę energiją daugiausia (išskyrus susidūrimo atvejus, kai energija panaudojama deformacijai) „atima“ trinties jėga.
Kinetinės energijos teorema: gaunamos jėgos darbas lygus kūno kinetinės energijos pokyčiui:
Kinetinės energijos teorema galioja ir bendruoju atveju, kai kūnas juda veikiamas kintančios jėgos, kurios kryptis nesutampa su judėjimo kryptimi. Šią teoremą patogu taikyti kūno pagreičio ir lėtėjimo uždaviniuose.
Potencinė energija
Kartu su kinetine energija arba judesio energija fizikoje svarbų vaidmenį atlieka koncepcija potenciali energija arba kūnų sąveikos energija.
Potencialią energiją lemia abipusė kūnų padėtis (pavyzdžiui, kūno padėtis Žemės paviršiaus atžvilgiu). Potencialios energijos sąvoką galima įvesti tik jėgoms, kurių darbas nepriklauso nuo kūno trajektorijos ir yra nulemtas tik pradinės ir galutinės padėties (vadinamoji. konservatyvios jėgos). Tokių jėgų darbas uždaroje trajektorijoje yra lygus nuliui. Šią savybę turi gravitacijos jėga ir elastingumo jėga. Šioms jėgoms galime įvesti potencialios energijos sąvoką.
Potenciali kūno energija Žemės gravitacijos lauke apskaičiuojamas pagal formulę:
Kūno potencinės energijos fizinė reikšmė: potencinė energija yra lygi gravitacijos jėgos atliekamam darbui, nuleidžiant kūną iki nulinio lygio ( h yra atstumas nuo kūno svorio centro iki nulinio lygio). Jei kūnas turi potencialią energiją, jis gali atlikti darbą, kai šis kūnas krenta iš aukščio h iki nulio. Gravitacijos darbas yra lygus kūno potencialios energijos pokyčiui, paimtam su priešingu ženklu:
Dažnai energijos užduočių metu tenka susirasti darbą, norint pakelti (apversti, išlipti iš duobės) kūną. Visais šiais atvejais reikia atsižvelgti ne į paties kūno, o tik į jo svorio centro judėjimą.
Potenciali energija Ep priklauso nuo nulinio lygio pasirinkimo, tai yra, nuo OY ašies pradžios pasirinkimo. Kiekvienoje užduotyje patogumo sumetimais pasirenkamas nulinis lygis. Fizinę reikšmę turi ne pati potenciali energija, o jos pasikeitimas kūnui judant iš vienos padėties į kitą. Šis pokytis nepriklauso nuo nulinio lygio pasirinkimo.
Ištemptos spyruoklės potenciali energija apskaičiuojamas pagal formulę:
kur: k- spyruoklės standumas. Ištempta (arba suspausta) spyruoklė gali pajudinti prie jos pritvirtintą kūną, tai yra, perduoti šiam kūnui kinetinę energiją. Todėl tokia spyruoklė turi energijos rezervą. Tempimas arba suspaudimas X turi būti skaičiuojamas nuo nedeformuotos kūno būklės.
Tampriai deformuoto kūno potencinė energija lygi tamprumo jėgos darbui pereinant iš tam tikros būsenos į būseną su nuline deformacija. Jei pradinėje būsenoje spyruoklė jau buvo deformuota, o jos pailgėjimas buvo lygus x 1, tada pereinant į naują būseną su pailgėjimu x 2, tamprumo jėga atliks darbą, lygų potencinės energijos pokyčiui, paimtam su priešingu ženklu (nes tamprumo jėga visada nukreipta prieš kūno deformaciją):

Potenciali energija elastinės deformacijos metu yra atskirų kūno dalių sąveikos viena su kita energija, veikiant tamprumo jėgoms.
Trinties jėgos darbas priklauso nuo nuvažiuoto atstumo (ši jėga, kurios darbas priklauso nuo trajektorijos ir nuvažiuoto atstumo, vadinama: išsklaidymo jėgos). Negalima įvesti trinties jėgos potencialios energijos sąvokos.
Efektyvumas
Efektyvumo koeficientas (COP)- sistemos (įrenginio, mašinos) efektyvumo charakteristika, susijusi su energijos konversija arba perdavimu. Jį lemia sunaudotos naudingosios energijos santykis su visu sistemos gaunamos energijos kiekiu (formulė jau pateikta aukščiau).
Naudingumą galima skaičiuoti ir pagal darbą, ir pagal galią. Naudingą ir sunaudotą darbą (galią) visada lemia paprastas loginis samprotavimas.
AT elektros varikliai Efektyvumas – atlikto (naudingo) mechaninio darbo santykis su elektros energija gautas iš šaltinio. Šilumos varikliuose naudingo mechaninio darbo ir sunaudotos šilumos kiekio santykis. Elektros transformatoriuose gautos elektromagnetinės energijos santykis per antrinė apvija, į pirminės apvijos sunaudotą energiją.
Dėl savo bendrumo efektyvumo sąvoka leidžia palyginti ir vieningu požiūriu įvertinti tokias skirtingas sistemas kaip branduoliniai reaktoriai, elektros generatoriai ir varikliai, šiluminės elektrinės, puslaidininkiniai įtaisai, biologiniai objektai ir kt.
Dėl neišvengiamų energijos nuostolių dėl trinties, aplinkinių kūnų įkaitimo ir kt. Efektyvumas visada yra mažesnis už vienybę. Atitinkamai, efektyvumas išreiškiamas kaip sunaudotos energijos dalis, tai yra, kaip tinkama dalis arba procentais, ir yra bematis dydis. Efektyvumas apibūdina mašinos ar mechanizmo efektyvumą. Šiluminių elektrinių naudingumo koeficientas siekia 35-40%, variklių vidaus degimas su slėgiu ir išankstiniu aušinimu - 40-50%, dinamos ir didelės galios generatoriai - 95%, transformatoriai - 98%.
Užduotį, kurioje reikia rasti efektyvumą arba jis žinomas, reikia pradėti nuo loginio samprotavimo – koks darbas naudingas ir kas išleidžiama.
Mechaninės energijos tvermės dėsnis
visa mechaninė energija kinetinės energijos (t. y. judėjimo energijos) ir potencialo (t. y. kūnų sąveikos gravitacijos ir elastingumo jėgomis energijos) suma vadinama:
![]()
Jeigu mechaninė energija nepereina į kitas formas, pavyzdžiui, į vidinę (šiluminę) energiją, tai kinetinės ir potencialios energijos suma lieka nepakitusi. Jei mechaninė energija paverčiama šilumine energija, tai mechaninės energijos pokytis yra lygus trinties jėgos darbui arba energijos nuostoliams, arba išsiskiriančiam šilumos kiekiui ir pan., kitaip tariant, bendrosios mechaninės energijos pokytis lygus išorinių jėgų darbui:
Kūnų, sudarančių uždarą sistemą (ty tokią, kurioje neveikia jokios išorinės jėgos, o jų darbas yra atitinkamai lygus nuliui) ir sąveikaujančių vienas su kitu gravitacinėmis ir tamprumo jėgomis, kinetinės ir potencialios energijos suma. , lieka nepakitęs:
Šis teiginys išreiškia Energijos tvermės dėsnis (LSE) mechaniniuose procesuose. Tai Niutono dėsnių pasekmė. Mechaninės energijos tvermės dėsnis įvykdomas tik tada, kai kūnai uždaroje sistemoje sąveikauja tarpusavyje elastingumo ir gravitacijos jėgomis. Visose energijos tvermės dėsnio problemose visada bus bent dvi kūnų sistemos būsenos. Įstatymas sako, kad visos pirmosios būsenos energija bus lygi antrosios būsenos bendrajai energijai.
Energijos tvermės dėsnio uždavinių sprendimo algoritmas:
- Raskite pradinės ir galutinės kūno padėties taškus.
- Užsirašykite, kokios ar kokios energijos organizmas turi šiuose taškuose.
- Sulyginkite pradinę ir galutinę kūno energiją.
- Pridėkite kitas būtinas lygtis iš ankstesnių fizikos temų.
- Išspręskite gautą lygtį arba lygčių sistemą matematiniais metodais.
Svarbu pažymėti, kad mechaninės energijos tvermės dėsnis leido gauti ryšį tarp kūno koordinačių ir greičių dviejuose skirtinguose trajektorijos taškuose, neanalizuojant kūno judėjimo dėsnio visuose tarpiniuose taškuose. Mechaninės energijos tvermės dėsnio taikymas gali labai supaprastinti daugelio problemų sprendimą.
Realiomis sąlygomis beveik visada judančius kūnus kartu su gravitacinėmis, tamprumo ir kitomis jėgomis veikia terpės trinties arba pasipriešinimo jėgos. Trinties jėgos darbas priklauso nuo kelio ilgio.
Jei tarp kūnų, sudarančių uždarą sistemą, veikia trinties jėgos, mechaninė energija neišsaugoma. Dalis mechaninės energijos paverčiama vidine kūnų energija (šildymas). Taigi bet kuriuo atveju išsaugoma visa energija (ty ne tik mechaninė energija).
Bet kokioje fizinėje sąveikoje energija neatsiranda ir neišnyksta. Jis tik keičiasi iš vienos formos į kitą. Šis eksperimentiškai nustatytas faktas išreiškia pagrindinį gamtos dėsnį - energijos tvermės ir transformacijos dėsnis.
Viena iš energijos tvermės ir transformacijos dėsnio pasekmių yra teiginys, kad neįmanoma sukurti „amžinojo judesio mašinos“ (perpetuum mobile) - mašinos, kuri galėtų dirbti neribotą laiką nenaudodama energijos.
Įvairios darbo užduotys
Jei užduotis yra surasti mechaninis darbas, tada pirmiausia pasirinkite būdą, kaip jį rasti:
- Darbus galima rasti pagal formulę: A = FS cos α . Raskite jėgą, kuri atlieka darbą, ir kūno poslinkio dydį, veikiant šiai jėgai pasirinktoje atskaitos sistemoje. Atkreipkite dėmesį, kad kampas turi būti pasirinktas tarp jėgos ir poslinkio vektorių.
- Išorinės jėgos darbą galima rasti kaip skirtumą tarp mechaninės energijos galutinėse ir pradinėse situacijose. Mechaninė energija yra lygi kūno kinetinės ir potencialios energijos sumai.
- Kūno pakėlimo darbai pastovus greitis galima rasti naudojant formulę: A = mgh, kur h- aukštis, iki kurio jis pakyla kūno svorio centras.
- Darbą galima rasti kaip galios ir laiko sandaugą, t.y. pagal formulę: A = Pt.
- Darbą galima rasti kaip figūros plotą pagal jėgos ir poslinkio arba galios ir laiko grafiką.
Energijos tvermės dėsnis ir sukamojo judėjimo dinamika
Šios temos užduotys yra gana sudėtingos matematiškai, tačiau žinant požiūrį, jos sprendžiamos pagal visiškai standartinį algoritmą. Visose problemose turėsite atsižvelgti į kūno sukimąsi vertikalioje plokštumoje. Sprendimas bus sumažintas iki šios veiksmų sekos:
- Būtina nustatyti jus dominantį tašką (tašką, kuriame reikia nustatyti kūno greitį, sriegio įtempimo jėgą, svorį ir pan.).
- Šiuo metu užrašykite antrąjį Niutono dėsnį, atsižvelgiant į tai, kad kūnas sukasi, tai yra, jis turi įcentrinį pagreitį.
- Užrašykite mechaninės energijos tvermės dėsnį, kad jame būtų nurodytas kūno greitis tame labai įdomiame taške, taip pat kūno būsenos ypatybės tam tikroje būsenoje, apie kurią kažkas žinoma.
- Priklausomai nuo sąlygos, išreikškite greitį kvadratu iš vienos lygties ir pakeiskite ją kita.
- Atlikite likusias būtinas matematines operacijas, kad gautumėte galutinį rezultatą.
Spręsdami problemas atminkite, kad:
- Viršutinio taško aplenkimo sąlyga sukimosi ant sriegių metu minimaliu greičiu yra atramos reakcijos jėga N in viršutinis taškas yra lygus 0. Ta pati sąlyga tenkinama pravažiuojant negyvos kilpos viršutinį tašką.
- Sukant ant strypo, viso apskritimo įveikimo sąlyga yra: mažiausias greitis viršutiniame taške yra 0.
- Kūno atsiskyrimo nuo rutulio paviršiaus sąlyga – atramos reakcijos jėga atskyrimo taške yra lygi nuliui.
Neelastiniai susidūrimai
Mechaninės energijos tvermės dėsnis ir impulso tvermės dėsnis leidžia rasti mechaninių problemų sprendimus tais atvejais, kai veikiančios jėgos nežinomos. Tokių problemų pavyzdys yra kūnų sąveika su poveikiu.
Smūgis (arba susidūrimas)Įprasta vadinti trumpalaikę kūnų sąveiką, dėl kurios jų greičiai patiria reikšmingų pokyčių. Kūnų susidūrimo metu tarp jų veikia trumpalaikės smūgio jėgos, kurių dydis, kaip taisyklė, nežinomas. Todėl Niutono dėsnių pagalba neįmanoma tiesiogiai nagrinėti poveikio sąveikos. Energijos ir impulso tvermės dėsnių taikymas daugeliu atvejų leidžia neįtraukti susidūrimo proceso ir gauti ryšį tarp kūnų greičių prieš ir po susidūrimo, apeinant visas tarpines šių dydžių vertes.
Dažnai tenka susidurti su kūnų poveikio sąveika kasdieniame gyvenime, technologijose ir fizikoje (ypač atomo ir elementariosios dalelės). Mechanikoje dažnai naudojami du smūgių sąveikos modeliai - absoliučiai elastingi ir absoliučiai neelastingi smūgiai.
Visiškai neelastingas poveikis Tokia smūgio sąveika vadinama, kai kūnai susijungia (sulimpa) vienas su kitu ir juda kaip vienas kūnas.
Esant visiškai neelastiniam smūgiui, mechaninė energija neišsaugoma. Jis iš dalies arba visiškai pereina į vidinę kūnų energiją (šildymą). Norint apibūdinti bet kokius poveikius, reikia užsirašyti ir impulso tvermės, ir mechaninės energijos tvermės dėsnį, atsižvelgiant į išsiskiriančią šilumą (labai pageidautina pirmiausia padaryti brėžinį).
Visiškai elastingas poveikis
Absoliučiai elastingas smūgis vadinamas susidūrimu, kurio metu išsaugoma kūnų sistemos mechaninė energija. Daugeliu atvejų atomų, molekulių ir elementariųjų dalelių susidūrimai paklūsta absoliučiai elastingo poveikio dėsniams. Esant absoliučiai tampriam smūgiui, kartu su impulso išsaugojimo įstatymu, įvykdomas mechaninės energijos tvermės dėsnis. Paprastas tobulai elastingo susidūrimo pavyzdys yra centrinis dviejų biliardo kamuoliukų, kurių vienas prieš susidūrimą buvo ramybės būsenoje, smūgis.
centrinis smūgis rutuliai vadinamas susidūrimu, kai kamuoliukų greičiai prieš ir po smūgio nukreipiami išilgai centrų linijos. Taigi, naudojant mechaninės energijos ir impulso tvermės dėsnius, galima nustatyti rutuliukų greičius po susidūrimo, jei žinomi jų greičiai prieš susidūrimą. Centrinis poveikis praktiškai realizuojamas labai retai, ypač kai kalbama apie atomų ar molekulių susidūrimus. Esant necentriniam elastiniam susidūrimui, dalelių (rutuliukų) greičiai prieš ir po susidūrimo nėra nukreipti išilgai tos pačios tiesės.
Ypatingas necentrinio elastingo smūgio atvejis – susidūrus dviem tos pačios masės biliardo kamuoliukams, kurių vienas prieš susidūrimą buvo nejudantis, o antrojo greitis nebuvo nukreiptas išilgai rutulių centrų linijos. Šiuo atveju rutuliukų greičio vektoriai po tampriojo susidūrimo visada nukreipti vienas kitam statmenai.
Apsaugos įstatymai. Sunkios užduotys
Keli kūnai
Atliekant kai kurias energijos tvermės dėsnio užduotis, kabeliai, kurių pagalba juda tam tikri objektai, gali turėti masę (ty nebūti nesvarūs, kaip galbūt jau esate įpratę). Šiuo atveju taip pat reikia atsižvelgti į tokių kabelių judėjimą (būtent jų svorio centrus).
Jei du kūnai, sujungti nesvariu strypu, sukasi vertikalioje plokštumoje, tada:
- pasirinkite nulinį lygį potencialiai energijai apskaičiuoti, pavyzdžiui, sukimosi ašies lygyje arba žemiausio taško, kuriame yra viena iš apkrovų, lygyje ir būtinai nubrėžkite brėžinį;
- parašytas mechaninės energijos tvermės dėsnis, kurio kairėje pusėje parašyta abiejų kūnų kinetinės ir potencialinės energijos suma pradinėje situacijoje, o abiejų kūnų kinetinės ir potencialinės energijos suma galutinėje situacijoje. parašyta dešinėje pusėje;
- atsižvelgti į tai, kad kūnų kampiniai greičiai yra vienodi, tada linijiniai greičiai kūnai yra proporcingi sukimosi spinduliams;
- jei reikia, užrašykite antrąjį Niutono dėsnį kiekvienam iš kūnų atskirai.
Sviedinio sprogimas
Sviedinio sprogimo atveju išsiskiria sprogstamoji energija. Norint rasti šią energiją, iš skeveldrų mechaninių energijų sumos po sprogimo reikia atimti sviedinio mechaninę energiją prieš sprogimą. Taip pat naudosime impulso tvermės dėsnį, parašytą kosinuso teoremos (vektoriaus metodo) forma arba projekcijų ant pasirinktų ašių forma.
Susidūrimai su sunkia plokšte
Leiskite link sunkios plokštės, kuri juda dideliu greičiu v, juda lengvas masės rutulys m su greičiu u n. Kadangi rutulio impulsas yra daug mažesnis už plokštės impulsą, plokštės greitis po smūgio nepasikeis ir toliau judės tuo pačiu greičiu ir ta pačia kryptimi. Dėl elastingo smūgio rutulys nuskris nuo plokštės. Čia svarbu tai suprasti rutulio greitis plokštės atžvilgiu nepasikeis. Tokiu atveju už galutinis greitis mes gauname kamuolį:
Taigi, rutulio greitis po smūgio padidėja dvigubai didesniu greičiu nei sienelė. Panašus argumentas tuo atveju, kai rutulys ir plokštė judėjo ta pačia kryptimi prieš smūgį, lemia tai, kad rutulio greitis sumažėja dvigubai už sienos greitį:
Problemos dėl didžiausių ir minimalių susidūrimo rutulių energijos verčių
Tokio tipo problemose svarbiausia suprasti, kad rutulių elastinės deformacijos potenciali energija yra maksimali, jei jų judėjimo kinetinė energija yra minimali - tai išplaukia iš mechaninės energijos tvermės dėsnio. Rutulių kinetinių energijų suma yra minimali tuo momentu, kai rutuliukų greičiai yra vienodo dydžio ir nukreipti ta pačia kryptimi. Šiuo metu santykinis rutuliukų greitis lygus nuliui, o deformacija ir su ja susijusi potencinė energija yra didžiausi.
Sėkmingas, kruopštus ir atsakingas šių trijų punktų įgyvendinimas leis jums parodyti puikų KT rezultatą, maksimalų, ką sugebate.
Radote klaidą?
Jei manote, kad radote klaidą mokymo medžiaga, tada parašykite, prašau, apie tai paštu. Taip pat galite pranešti apie klaidą Socialinis tinklas(). Laiške nurodykite dalyką (fizika ar matematika), temos ar testo pavadinimą arba numerį, užduoties numerį arba vietą tekste (puslapyje), kur, jūsų nuomone, yra klaida. Taip pat aprašykite, kokia yra tariama klaida. Jūsų laiškas neliks nepastebėtas, klaida bus arba ištaisyta, arba paaiškinama, kodėl tai ne klaida.
Galia- fizinis dydis, lygus atlikto darbo ir tam tikro laiko tarpo santykiui.
Yra sąvoka apie vidutinę galią per tam tikrą laikotarpį Δt. Vidutinė galia apskaičiuojama pagal šią formulę: N = ∆A / ∆t, momentinė galia pagal šią formulę: N = dA / dt. Šios formulės turi gana apibendrintą formą, nes galios sąvoka yra keliose fizikos šakose - mechanikoje ir elektrofizikoje. Nors pagrindiniai galios skaičiavimo principai išlieka maždaug tokie patys kaip ir bendrojoje formulėje.
Galia matuojama vatais. Vatas yra galios vienetas, lygus džauliui, padalintam iš sekundės. Be vatų, yra ir kitų galios vienetų: Arklio jėgos, erg per sekundę, masės jėgos metras per sekundę.
- Vienas metrinių arklio galių lygus 735 vatams, anglų – 745 vatai.
- Erg- labai mažas matavimo vienetas, vienas erg yra lygus dešimčiai minus septintajai vato galiai.
- Vienas masės jėgos metras per sekundę lygus 9,81 vato.
Matavimo prietaisai
Iš esmės galios matavimo prietaisai naudojami elektrofizikoje, nes mechanikoje, žinodami tam tikrą parametrų rinkinį (greitį ir jėgą), galite savarankiškai apskaičiuoti galią. Bet lygiai taip pat elektrofizikoje galite apskaičiuoti galią pagal parametrus, bet iš tikrųjų Kasdienybė tiesiog nenaudojame matavimo priemonių mechaninei galiai fiksuoti. Kadangi dažniausiai šie tam tikrų mechanizmų parametrai yra tokie. Kalbant apie elektroniką, pagrindinis instrumentas yra vatmetras, naudojamas kasdieniame įprasto elektros skaitiklio įrenginyje.
Vatmetrai pagal dažnį gali būti suskirstyti į keletą tipų:
- Žemas dažnis
- RF
- Optinis
Vatmetrai gali būti analoginiai arba skaitmeniniai. Žemo dažnio (LF) du induktoriai yra skaitmeniniai ir analoginiai, naudojami pramonėje ir kasdieniame gyvenime kaip įprastinių elektros skaitiklių dalis. RF vatmetrai skirstomi į dvi grupes: sugertą galią ir perduodamą. Skirtumas slypi vatmetro prijungimo prie tinklo būdu, praeinantys tinklai jungiami lygiagrečiai, sugeriami tinklo gale kaip papildoma apkrova. Šviesos srautų ir lazerio spindulių galiai nustatyti naudojami optiniai vatmetrai. Jie daugiausia naudojami bet kurioje gamyboje ir laboratorijose.
Galia mechanikoje
 Galia mechanikoje tiesiogiai priklauso nuo jėgos ir darbo, kurį ši jėga atlieka. Darbas – tai dydis, apibūdinantis kūną veikiančią jėgą, kurią veikiant kūnas nukeliauja tam tikrą atstumą. Galia apskaičiuojama iš greičio vektoriaus ir jėgos vektoriaus skaliarinės sandaugos: P=F*v=F*v* cos a
(jėga padauginta iš greičio vektoriaus ir kampo tarp jėgos ir greičio vektorių (kosinuso alfa)).
Galia mechanikoje tiesiogiai priklauso nuo jėgos ir darbo, kurį ši jėga atlieka. Darbas – tai dydis, apibūdinantis kūną veikiančią jėgą, kurią veikiant kūnas nukeliauja tam tikrą atstumą. Galia apskaičiuojama iš greičio vektoriaus ir jėgos vektoriaus skaliarinės sandaugos: P=F*v=F*v* cos a
(jėga padauginta iš greičio vektoriaus ir kampo tarp jėgos ir greičio vektorių (kosinuso alfa)).
Taip pat galite apskaičiuoti kūno sukamojo judėjimo galią. P=M* w= π * M * n / 30. Galia lygi (M) jėgos momento ir (w) kampinio greičio arba pi (p) jėgos momento (M) ir (n) sukimosi greičio padalijus iš 30.
Galia elektrofizikoje
Elektrofizikoje galia apibūdina elektros perdavimo arba transformacijos greitį. Yra tokie galios tipai:
- Momentinė elektros energija. Kadangi galia yra darbas, atliktas per tam tikrą laiką, o krūvis juda tam tikra laidininko dalimi, turime formulę: P(a-b) = A / Δt. A-B apibūdina sritį, per kurią praeina krūvis. A – krūvio ar įkrovų darbas, Δt – laikas, per kurį krūvis ar įkrovimai praeina per atkarpą (A-B). Ta pati formulė naudojama apskaičiuojant kitas galios vertes skirtingose situacijose, kai reikia išmatuoti momentinę laidininko segmento galią.
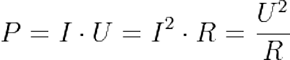
- Taip pat galite apskaičiuoti pastovaus srauto galią: P = I * U = I^2 * R = U^2 / R.
- Galia kintamoji srovė neapskaičiuojamas pagal formulę nuolatinė srovė. Kintamojoje srovėje yra trys galios tipai:
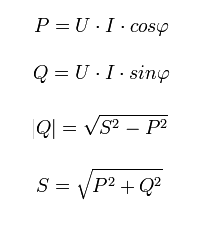
- Aktyvioji galia(P), kuri yra lygi P=U*I* cos f . Kur U ir I yra srovės parametrai, o f (phi) yra poslinkio tarp fazių kampas. Ši formulė parodytas kaip vienfazės sinusinės srovės pavyzdys.
- Reaktyvioji galia (Q) apibūdina apkrovas, kurias įrenginiuose sukuria vienfazės sinusinės kintamos elektros srovės virpesiai. Q=U*I* nuodėmė f . Matavimo vienetas yra reaktyvusis voltas-amperas (var).
- Tariamoji galia (S) lygi aktyviosios ir reaktyviosios galios kvadratų šakniai. Matuojama voltais-amperais.
- Neaktyvioji galia – pasyviosios galios, esančios grandinėse su kintamąja sinusine srove, charakteristika. Lygus reaktyviosios galios ir harmoninės galios kvadratų sumos kvadratinei šaknims. Jei nėra aukštesnių harmonikų galios, ji prilygsta reaktyviosios galios moduliui.
- Galia kintamoji srovė neapskaičiuojamas pagal formulę nuolatinė srovė. Kintamojoje srovėje yra trys galios tipai:
Galia yra fizinis kiekis lygus, kaip taisyklė, visos sistemos energijos kitimo greičiui. Konkrečiau kalbant apie tai, kam lygi galia, galima teigti, kad tai tiesiogiai priklauso nuo per tam tikrą laikotarpį atliktų darbų santykio ir būtent nuo šio laikotarpio dydžio. Yra vidutinės ir momentinės galios sąvoka. Tai yra, jei mes kalbame apie sistemos galią per tam tikrą laikotarpį, tai yra vidutinė galia. Jei šiuo metu atsižvelgiama į galią, tai yra momentinė galia. Iš čia gauname tokią formulę:
N (galia) = E (energija) / t (laikas)
Todėl integralas, gautas iš atskiro laikotarpio momentinės galios rodiklių, yra lygus bendram per šį laikotarpį sunaudotos energijos kiekiui.
Šio kiekio matavimo vienetas yra vatas. Atsižvelgiant į ankstesnę formulę, galime pasakyti, kad 1 vatas = 1 J / 1 s. Kitas populiarus galios matavimo vienetas yra arklio galios.
Kas yra galia mechanikoje?
Jėga, veikianti judantį kūną, veikia. Šiuo atveju galią lemia jėgos vektoriaus ir greičio vektoriaus, kuriuo sistema juda erdvėje, skaliarinė sandauga. Tai yra:
N = F*v = F*v*cos a
Šioje formulėje F – jėga, v – greitis, a – kampas, jungiantis greičio vektorių ir jėgos vektorių.
Jei kalbama apie sukamasis judesys kūno, tada tinka ši formulė:
N \u003d M * w \u003d (2P * M * n) / 60
Šioje formulėje M yra jėgos momentas, w yra kampinis greitis, P yra Pi, o n yra apsisukimų skaičius per nustatytą laiko vienetą (per minutę).
Kas lemia elektros energijos galią?
Terminas elektros energija apibūdina elektros energijos kitimo arba perdavimo greitį. Tiriant kintamos srovės tinklą, be „momentinės galios“ sąvokos, kuri atitinka tradicinį fizinį apibrėžimą, įprasta naudoti aktyviąją galią. Aktyvioji galia yra lygi vidutinei momentinei galiai per tam tikrą laikotarpį, rodikliui, kuris nustato reaktyviąją galią, atitinkančią energiją, judančią tarp šaltinio ir vartotojo be sklaidos, ir bendrosios galios vertę, kuri nustatoma pagal aktyviosios galios sandaugą. srovės ir įtampos vertės, neatsižvelgiant į fazės poslinkį.