Tiešā palaišana ir visizplatītākā indukcijas motora palaišanas metode ar vāveres būra rotors. Motors ir tieši savienots ar elektrotīklu, izmantojot starteri. Šajā gadījumā vāveres asinhronais motors attīsta lielu palaišanas griezes momentu ar salīdzinoši īsu paātrinājuma laiku. Šo metodi parasti izmanto mazas un vidējas jaudas motoriem, kas īsā laikā sasniedz pilnu darba ātrumu.
Tiešais starts. Šo metodi izmanto, lai sāktu indukcijas motori ar vāveres būra rotoru. Šāda veida mazas un vidējas jaudas motori parasti ir konstruēti tā, lai tad, kad statora tinums ir tieši pieslēgts tīklam, radušās palaišanas strāvas neradītu pārmērīgus elektrodinamiskos spēkus un temperatūras paaugstināšanos, kas ir bīstama no mehāniskās un iekārtas galveno elementu termiskā izturība.
Asinhronajos motoros L/R attiecība ir salīdzinoši maza (īpaši mazos motoros), tāpēc pārejošajam ieslēgšanās brīdī ir raksturīga ļoti ātra brīvās strāvas vājināšanās. Tas ļauj neņemt vērā brīvo strāvu un ņemt vērā tikai pārejas strāvas vienmērīgo vērtību.
Motorus parasti iedarbina, izmantojot elektromagnētisko slēdzi K - magnētisko starteri (4.27. att., a) un paātrina automātiski atbilstoši dabiskajam mehāniskajam raksturlielumam M (4.27.6. att.) no punkta P, kas atbilst sākotnējam palaišanas momentam, līdz punktam. P, kas atbilst nosacījumam M = Mst . Paātrinājumu paātrinājuma laikā nosaka starpība starp M un Mst līkņu abscisēm un motora rotora un mehānisma inerces momentu, kas ir iestatīts uz rotāciju. Ja sākotnējā palaišanas brīdī Mp< Мст, двигатель разогнаться не сможет.
Sākotnējā palaišanas griezes momenta vērtību var iegūt no formulas (4.46a), pieņemot
Mn \u003d m1 U12R "2 / (w1 [(R1 + R" 2) 2 + (X1 + X "2) 2]).
Momentu attiecību Mp / Mnom = kp.m sauc par sākotnējā starta griezes momenta daudzveidību. Dzinējiem ar vāveres sprostu rotoru ar jaudu 0,6-100 kW, GOST nosaka kp.m = 1,0÷2,0; jauda 100-1000 kW - kp.m = 0,7÷1,0.
Parasti nav vēlams iegūt sākuma griezes momenta attiecības, kas ir lielākas par tām, kuras regulē GOST, jo tas ir saistīts vai nu ar palielinājumu. aktīvā pretestība rotoru (skatīt 4.58. punktu), vai ar rotora konstrukcijas izmaiņām (sk. 4.11. §), kas pasliktina dzinēja energoefektivitāti.
Šīs palaišanas metodes trūkums papildus salīdzinoši nelielajam starta griezes momentam ir arī liels metiens sākuma strāva, piecas līdz septiņas reizes lielāka par nominālo strāvu.
Neskatoties uz šiem trūkumiem, dzinēja iedarbināšana, tieši pieslēdzot statora tinumu tīklam, tiek plaši izmantota vāveres motora vienkāršības un labo tehnisko un ekonomisko īpašību dēļ - zemas izmaksas un augsta energoefektivitāte (η, cos φ1, km, utt.).
Zemsprieguma palaišana. Šāds starts tiek izmantots asinhronajiem motoriem ar lieljaudas vāveres sprostu rotoru, kā arī vidējas jaudas motoriem ar nepietiekami jaudīgiem elektrotīkliem. Sprieguma samazināšanu var veikt šādos veidos:
a) pārslēdzot statora tinumu ar slēdzi no parastās ķēdes Δ uz palaišanas ķēdi Y. Šajā gadījumā statora tinuma fāzēm pievadītais spriegums samazinās √3 reizes, kas noved pie fāzes strāvu samazināšanās par √3 reizes un lineārās strāvas 3 reizes. Dzinēja iedarbināšanas un paātrināšanas līdz nominālajam ātrumam procesa beigās statora tinums tiek pārslēgts atpakaļ uz parasto ķēdi;
b) papildu aktīvo (rezistori) vai reaktīvo (reaktoru) pretestību iekļaušana statora tinumu ķēdē palaišanas periodam (4.28. att., a). Šajā gadījumā uz norādītajām pretestībām tiek izveidoti daži sprieguma kritumi ΔUadd, kas ir proporcionāli palaišanas strāvai, kā rezultātā statora tinumam tiek pievadīts samazināts spriegums. Motoram paātrinoties, samazinās rotora tinumā inducētais EDSE2 un līdz ar to arī palaišanas strāva. Rezultātā sprieguma kritums ΔUadd uz norādītajām pretestībām samazinās un motoram pievadītais spriegums automātiski palielinās. Pēc paātrinājuma beigām papildu rezistori vai reaktori tiek īssavienoti ar kontaktoru K1;
c) motora pievienošana tīklam caur pazeminošu autotransformatoru ATP (4.28.6. att.), kuram palaišanas procesā var būt vairākas pakāpes, kuras var pārslēgt ar atbilstošu aprīkojumu.
Šo iedarbināšanas metožu trūkums, pazeminot spriegumu, ir ievērojams motora palaišanas un maksimālā griezes momenta samazinājums, kas ir proporcionāls pielietotā sprieguma kvadrātam, tāpēc tos var izmantot tikai, iedarbinot motorus bez slodzes.
Uz att. 4.29, piemēram, parāda motora mehāniskos raksturlielumus pie nominālā un pazemināta sprieguma, t.i., kad statora tinums ir pievienots saskaņā ar Y un Δ shēmām, kā arī strāvas I1 un griezes momenta M grafikus, iedarbinot dzinēju ar statora tinuma pārslēgšana no Y uz Δ. Savienojot saskaņā ar Y shēmu, maksimālais un palaišanas griezes moments tiek samazināts trīs reizes, kā rezultātā motors nespēj iedarbināt mehānismu ar slodzes griezes momentu Mn.
Asinhronā motora palaišana
Palaišanas brīdī n=0, t.i. slīdēšana S=1. Jo strāvas rotora un statora tinumos ir atkarīgas no slīdēšanas un palielinās līdz ar tā palielināšanos, motora palaišanas strāva ir 5 ÷ 8 reizes lielāka par nominālo strāvu
Istart=(5÷8)In.
Kā minēts iepriekš, rotora EMF augstās frekvences dēļ asinhronajiem motoriem ir ierobežots palaišanas griezes moments.
Mstart=(0,8÷1,8)Mn.
Lai iedarbinātu dzinēju, ir nepieciešams, lai tā radītais palaišanas griezes moments pārsniegtu vārpstas slodzes griezes momentu. Atkarībā no barošanas avotu jaudas un palaišanas apstākļiem tiek izmantotas dažādas palaišanas metodes, kurām ir šādi mērķi: palaišanas strāvas samazināšana un palaišanas griezes momenta palielināšana.
Ir šādi asinhrono motoru iedarbināšanas veidi: tiešs savienojumsķēdē, zemsprieguma palaišana, pretestības palaišana, motoru izmantošana ar uzlabotām palaišanas īpašībām.
2.11.1. Tiešs savienojums ar tīklu
Tas ir vienkāršākais un lētākais veids, kā sākt. Motors tiek piegādāts ar nominālo spriegumu manuāli vai ar tālvadības pulti. Tiešais pieslēgums tīklam pieļaujams, ja motora jauda nepārsniedz 5% no transformatora jaudas, ja no tā tiek barots arī apgaismojuma tīkls. Jaudas ierobežojums ir izskaidrojams ar strāvas pārspriegumiem palaišanas brīdī, kas noved pie sprieguma samazināšanās transformatora sekundāro tinumu spailēs. Ja apgaismojuma tīkls netiek piegādāts no transformatora, tad tiešo pieslēgumu tīklam var izmantot motoriem, kuru jauda nepārsniedz 25% no transformatora jaudas.
2.11.2. Iedarbināšana ar samazinātu spriegumu
Šo metodi izmanto, iedarbinot jaudīgus motorus, kuriem tiešs savienojums ar tīklu nav pieņemams. Lai samazinātu statora tinumam piegādāto spriegumu, tiek izmantoti droseles un pazeminošie autotransformatori. Pēc palaišanas tīkla spriegums tiek pievadīts statora tinumam.
Spriegums tiek pazemināts, lai samazinātu palaišanas strāvu, bet tajā pašā laikā, kā izriet no att. 2.17 un 2.17.b, starta griezes moments samazinās. Ja spriegums palaišanas brīdī tiek samazināts par koeficientu, palaišanas griezes moments samazināsies par koeficientu 3. Tāpēc šo palaišanas metodi var izmantot tikai tad, ja uz vārpstas nav slodzes, t.i. dīkstāves režīmā.
Ja saskaņā ar pases datiem motoram jābūt pieslēgtam tīklam pēc trīsstūra shēmas, tad, lai samazinātu palaišanas strāvu palaišanas laikā, statora tinums ir pievienots saskaņā ar zvaigznes shēmu.
Šīs palaišanas metodes galvenie trūkumi ir augstās palaišanas aprīkojuma izmaksas un neiespējamība iedarbināt ar slodzi uz vārpstu.
Daudzu ar asinhrono dzinēju darbināmu mehānismu darbības laikā, atbilstoši tehnoloģiskajām prasībām, rodas nepieciešamība regulēt šo mehānismu griešanās ātrumu. Asinhrono motoru griešanās frekvences (ātruma) kontroles metodes atklāj attiecību:
n=(1-S)n0=(1-S)60f/p.
No tā izriet, ka noteiktai vārpstas slodzei rotora ātrumu var regulēt:
slīdēšanas maiņa;
stabu pāru skaita izmaiņas;
mainot barošanas avota frekvenci.
2.12.1. Slīdēšanas maiņa
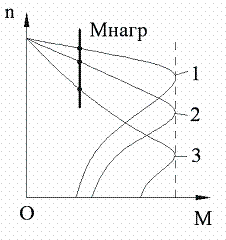
Šo metodi izmanto to mehānismu piedziņā, kur ir uzstādīti asinhronie motori ar fāzes rotoru. Piemēram, celšanas un transportēšanas mašīnu piedziņā. Fāzes rotora ķēdē tiek ievadīts regulēšanas reostats. Rotora aktīvās pretestības palielināšanās neietekmē kritiskā momenta lielumu, bet palielina kritisko slīdi (2.21. att.).
Uz att. 2.21 parādīti asinhronā motora mehāniskie raksturlielumi ar dažādām regulējošā reostata pretestībām Rp3> Rp2> 0, Rp1=0.
Kā izriet no att. 2.21, izmantojot šo metodi, varat samazināt lielu ātruma kontroles diapazonu. Šīs metodes galvenie trūkumi:
Sakarā ar lielajiem zudumiem uz regulēšanas reostatu, efektivitāte samazinās, t.i. neekonomisks veids.
Asinhronā motora mehāniskais raksturlielums kļūst mīkstāks, palielinoties rotora aktīvajai pretestībai, t.i. samazinās dzinēja stabilitāte.
Nav iespējams vienmērīgi regulēt ātrumu.
Šo trūkumu dēļ šī metode tiek izmantota īslaicīgai griešanās ātruma samazināšanai.
Asinhrono motoru ātruma kontrole
No formulas izriet, ka asinhronā motora rotora apgriezienu skaitu var regulēt šādos veidos: mainot barošanas sprieguma frekvenci f1, polu pāru skaitu p un slīdes lielumu s.
Frekvences regulēšana. Šī metode ļauj vienmērīgi mainīt ātrumu plašā diapazonā. Tās ieviešanai ir nepieciešams, lai dzinējs tiktu darbināts no atsevišķa avota (2.18. attēls). 
Kā šāds avots pašlaik visplašāk tiek izmantoti pusvadītāju statiskie frekvences pārveidotāji.
Atkarībā no prasībām asinhronā motora mehāniskajiem parametriem frekvences regulēšanas laikā, vienlaikus ar frekvences f1 maiņu, saskaņā ar noteiktu likumu ir jāmaina statora tinumam piegādātais spriegums U1.
Maksimālais motora griezes moments ir aptuveni (neņemot vērā pretestību r1), ko nosaka (2.40),
![]() .
.
Ņemot vērā, ka ,,, mēs saņemam
Ja, kontrolējot ātrumu, ir nepieciešams, lai jebkurā frekvencē f1 maksimālais griezes moments paliktu nemainīgs (regulējums ar), tad mēs iegūstam
no kā izriet, ka, lai regulētu n2 pie ir nepieciešams mainīt statora tinumam pievadīto spriegumu U1 proporcionāli tā frekvencei. Šajā gadījumā mašīnas galvenā magnētiskā plūsma pie dažādām frekvences f1 vērtībām paliek nemainīga, t.i.
![]() (2.56)
(2.56)
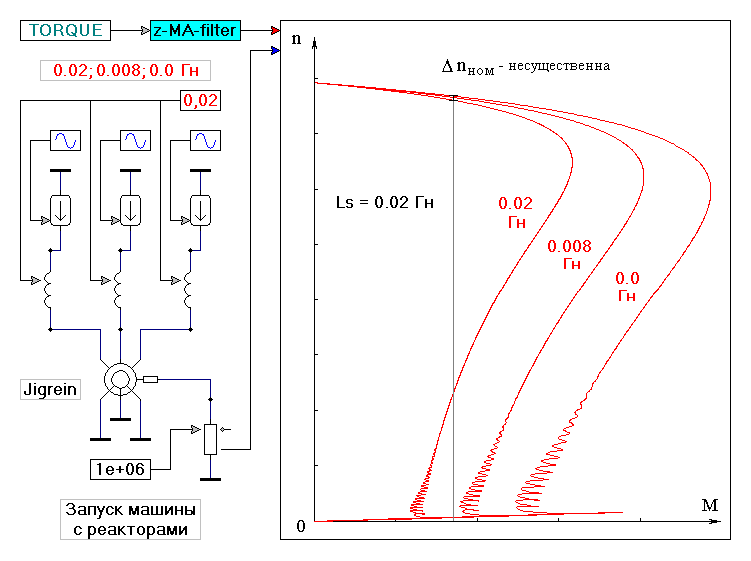
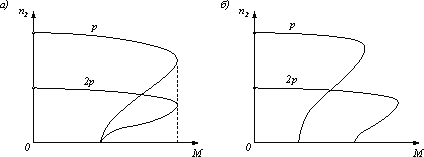
Asinhronā motora mehāniskie raksturlielumi regulēšanas laikā ar Mmax = const ir parādīti 2.19. attēlā. 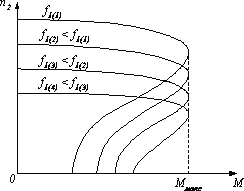
Frekvences regulēšanas trūkums ir salīdzinoši augstās pārveidotāju uzstādīšanas izmaksas.
Ātruma kontrole, mainot statora tinumu polu pāru skaitu. Lai īstenotu šo noteikumu, statoram kopējās rievās tiek novietoti nevis viens, bet divi tinumi 
dažādiem soļiem un līdz ar to dažādam polu pāru skaitam. Atkarībā no nepieciešamā ātruma tīklam tiek pievienots viens vai otrs tinums. Šo metodi izmanto salīdzinoši reti, jo tā ir ievērojams trūkums- zema tinuma stieples izmantošana (darbojas tikai viens no tinumiem).
Daudz biežāk polu pāru skaita izmaiņas tiek panāktas, mainot (pārslēdzot) statora tinuma savienojuma shēmu. Šādas pārslēgšanas princips ir parādīts 2.20. attēlā.
Pārslēdzoties no divu spoļu seriālā savienojuma uz paralēlo, polu pāru skaits mainās no 2 uz 1. Ja uz rotora ir fāzes tinums, tas arī jāpārslēdz vienlaikus ar statora tinumu, kas ir liels trūkums. Tāpēc šī ātruma regulēšanas metode tiek izmantota tikai motoriem ar vāveres sprostu rotoru.
Asinhronos motorus ar polu pāru skaita pārslēgšanu sauc par vairāku ātrumu. Tie ir pieejami divos, trīs un četros ātrumos. Ir zināms liels skaits ķēžu, kas ļauj pārslēgt polu pāru skaitu. Šīs shēmas ir sadalītas pastāvīgas griezes momenta kontroles shēmās un nemainīgas jaudas kontroles shēmās. Divu ātrumu motoru mehāniskie raksturlielumi parādīti 2.21. attēlā.

Attēls 2.20. Polu pāru skaita maiņa, pārslēdzot tinumu spoles:
a – divi stabu pāri; b - viens stabu pāris
2.21. attēls. Divu ātrumu motora mehāniskie parametri
ar polu pāru skaita pārslēgšanu attiecībā 2:1
pie nemainīga griezes momenta (a) un pie nemainīgas jaudas (b)
No visiem veidiem, kā kontrolēt asinhrono motoru ātrumu, polu pāru skaita pārslēgšanas metode ir visekonomiskākā, lai gan tai ir arī trūkumi:
- dzinējiem ir salīdzinoši lieli izmēri un svars, salīdzinot ar parastas konstrukcijas dzinējiem;
- soļu ātruma kontrole.
Darbgaldu un dažādu mehānismu darbināšanai tiek izmantoti daudzpakāpju motori, kuru rotācijas ātrums jāregulē plašā diapazonā (piemēram, liftu asinhronie motori).
Ātruma kontrole, mainot barošanas spriegumu. Norādīto regulēšanu var veikt ar tiristoru sprieguma regulatoru PH (2.22. attēls). 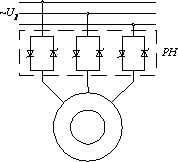
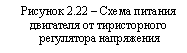
Tā kā asinhronā motora griezes moments ir proporcionāls, mehāniskie raksturlielumi pie sprieguma, kas ir mazāks par nominālo spriegumu, būs zemāks par dabisko (2.23. attēls). 
Ja pretestības moments MC paliek nemainīgs, tad, kā izriet no 2.23. attēla, spriegumam krītoties, motora slīdēšana.
palielinās.
Šajā gadījumā rotora ātrums samazinās.
Slīdes regulēšana šādā veidā ir iespējama iekšienē
0 < s < sкр.
Tālāka sprieguma samazināšanās (zem U1(2)) ir nepieņemama, jo šajā gadījumā Mmax.< MС и двигательостановится.
Motoru ātruma regulēšanai, mainot ieejas spriegumu U1, ir būtisks trūkums: šajā gadījumā palielinās zudumi un līdz ar to samazinās motora efektivitāte. Spriegumam proporcionāli samazinoties U1, samazinās mašīnas galvenā magnētiskā plūsma, kā rezultātā pie M = MС = const palielinās strāva rotora tinumā un līdz ar to arī elektriskie zudumi rotorā. Magnētiskie zudumi statora tēraudā ir samazināti. Parasti pie motora slodzēm, kas ir tuvu nominālajai, U1 samazināšanās izraisa kopējo zudumu palielināšanos un motora apsildes palielināšanos. Tāpēc aplūkotā ātruma kontroles metode galvenokārt tiek izmantota mazas jaudas mašīnām.
Asinhrono motoru ātruma kontrole, iekļaujot rotora ķēdē papildu aktīvo pretestību. Šo vadības metodi izmanto tikai motoros ar fāzes rotoru. Tas ļauj vienmērīgi mainīt ātrumu plašā diapazonā (2.24. Attēls). Tās trūkumi ir: lieli enerģijas zudumi papildu pretestībās, pārmērīgi “mīkstas” motora mehāniskās īpašības ar augstu pretestību rotora ķēdē. Dažos gadījumos pēdējais ir nepieņemams, jo nelielas slodzes griezes momenta izmaiņas atbilst būtiskām ātruma izmaiņām. Praksē šo metodi galvenokārt izmanto mazu motoru ātruma regulēšanai, piemēram, pacelšanas ierīcēs. 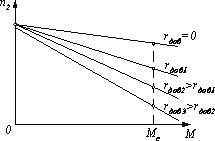
![]()
Izmantojot šo dzinēja apgriezienu regulēšanas metodi, rotora ķēdē iekļautajam regulējošajam reostatam (papildu aktīvā pretestība) jābūt konstruētam ilgstošai darbībai. Tāpēc palaišanas reostatus, kas paredzēti īslaicīgai strāvas plūsmai palaišanas periodā, nevar izmantot kā regulējošos.
Tiešā iedarbināšana ir visizplatītākā vāveres asinhronā motora palaišanas metode. Motors ir tieši savienots ar elektrotīklu, izmantojot starteri. Šajā gadījumā asinhronais motors ar vāveres sprostu attīsta lielu palaišanas griezes momentu ar salīdzinoši īsu paātrinājuma laiku. Šo metodi parasti izmanto mazas un vidējas jaudas motoriem, kas īsā laikā sasniedz pilnu darba ātrumu.
Tiešais starts. Šo metodi izmanto, lai iedarbinātu asinhronos motorus ar vāveres būra rotoru. Šāda veida mazas un vidējas jaudas motori parasti ir konstruēti tā, lai tad, kad statora tinums ir tieši savienots ar tīklu, no tā izrietošās palaišanas strāvas neradītu pārmērīgus elektrodinamiskos spēkus un temperatūras paaugstināšanos, kas ir bīstami no mehāniskās un iekārtas galveno elementu termiskā izturība.
Asinhronajos motoros L/R attiecība ir salīdzinoši maza (īpaši mazos motoros), tāpēc pārejošajam ieslēgšanās brīdī ir raksturīga ļoti ātra brīvās strāvas vājināšanās. Tas ļauj neņemt vērā brīvo strāvu un ņemt vērā tikai pārejas strāvas vienmērīgo vērtību.
Motorus parasti iedarbina, izmantojot elektromagnētisko slēdzi K - magnētisko starteri (4.27. att., a) un paātrina automātiski atbilstoši dabiskajam mehāniskajam raksturlielumam M (4.27.6. att.) no punkta P, kas atbilst sākotnējam palaišanas momentam, līdz punktam. P, kas atbilst nosacījumam M = Mst . Paātrinājumu paātrinājuma laikā nosaka starpība starp M un Mst līkņu abscisēm un motora rotora un mehānisma inerces momentu, kas ir iestatīts uz rotāciju. Ja sākotnējā palaišanas brīdī Mp< Мст, двигатель разогнаться не сможет.
Sākotnējā palaišanas griezes momenta vērtību var iegūt no formulas (4.46a), pieņemot
Mn \u003d m1 U12R "2 / (w1 [(R1 + R" 2) 2 + (X1 + X "2) 2]).
Momentu attiecību Mp / Mnom = kp.m sauc par sākotnējā starta griezes momenta daudzveidību. Dzinējiem ar vāveres sprostu rotoru ar jaudu 0,6-100 kW, GOST nosaka kp.m = 1,0÷2,0; jauda 100-1000 kW - kp.m = 0,7÷1,0.
Parasti nav vēlams iegūt sākuma griezes momenta attiecības, kas ir lielākas par tām, kuras regulē GOST, jo tas ir saistīts vai nu ar rotora aktīvās pretestības palielināšanos (skatīt 4.58.), vai ar rotora konstrukcijas izmaiņām (skatīt 4.11. punktu), kas pasliktina dzinēja energoefektivitāti.
Šīs palaišanas metodes trūkums papildus salīdzinoši nelielajam starta griezes momentam ir arī liela ieslēgšanas strāva, kas ir piecas līdz septiņas reizes lielāka par nominālo strāvas vērtību.
Neskatoties uz šiem trūkumiem, dzinēja iedarbināšana, tieši pieslēdzot statora tinumu tīklam, tiek plaši izmantota vāveres motora vienkāršības un labo tehnisko un ekonomisko īpašību dēļ - zemas izmaksas un augsta energoefektivitāte (η, cos φ1, km, utt.).
Zemsprieguma palaišana. Šāds starts tiek izmantots asinhronajiem motoriem ar lieljaudas vāveres sprostu rotoru, kā arī vidējas jaudas motoriem ar nepietiekami jaudīgiem elektrotīkliem. Sprieguma samazināšanu var veikt šādos veidos:
a) pārslēdzot statora tinumu ar slēdzi no parastās ķēdes Δ uz palaišanas ķēdi Y. Šajā gadījumā statora tinuma fāzēm pievadītais spriegums samazinās √3 reizes, kas noved pie fāzes strāvu samazināšanās par √3 reizes un lineārās strāvas 3 reizes. Dzinēja iedarbināšanas un paātrināšanas līdz nominālajam ātrumam procesa beigās statora tinums tiek pārslēgts atpakaļ uz parasto ķēdi;
b) papildu aktīvo (rezistori) vai reaktīvo (reaktoru) pretestību iekļaušana statora tinumu ķēdē palaišanas periodam (4.28. att., a). Šajā gadījumā uz norādītajām pretestībām tiek izveidoti daži sprieguma kritumi ΔUadd, kas ir proporcionāli palaišanas strāvai, kā rezultātā statora tinumam tiek pievadīts samazināts spriegums. Motoram paātrinoties, samazinās rotora tinumā inducētais EDSE2 un līdz ar to arī palaišanas strāva. Rezultātā sprieguma kritums ΔUadd uz norādītajām pretestībām samazinās un motoram pievadītais spriegums automātiski palielinās. Pēc paātrinājuma beigām papildu rezistori vai reaktori tiek īssavienoti ar kontaktoru K1;
c) motora pievienošana tīklam caur pazeminošu autotransformatoru ATP (4.28.6. att.), kuram palaišanas procesā var būt vairākas pakāpes, kuras var pārslēgt ar atbilstošu aprīkojumu.
Šo iedarbināšanas metožu trūkums, pazeminot spriegumu, ir ievērojams motora palaišanas un maksimālā griezes momenta samazinājums, kas ir proporcionāls pielietotā sprieguma kvadrātam, tāpēc tos var izmantot tikai, iedarbinot motorus bez slodzes.
Uz att. 4.29, piemēram, parāda motora mehāniskos raksturlielumus pie nominālā un pazemināta sprieguma, t.i., kad statora tinums ir pievienots saskaņā ar Y un Δ shēmām, kā arī strāvas I1 un griezes momenta M grafikus, iedarbinot dzinēju ar statora tinuma pārslēgšana no Y uz Δ. Savienojot saskaņā ar Y shēmu, maksimālais un palaišanas griezes moments tiek samazināts trīs reizes, kā rezultātā motors nespēj iedarbināt mehānismu ar slodzes griezes momentu Mn.
Asinhronā motora palaišana
Palaišanas brīdī n=0, t.i. slīdēšana S=1. Jo strāvas rotora un statora tinumos ir atkarīgas no slīdēšanas un palielinās līdz ar tā palielināšanos, motora palaišanas strāva ir 5 ÷ 8 reizes lielāka par nominālo strāvu
Istart=(5÷8)In.
Kā minēts iepriekš, rotora EMF augstās frekvences dēļ asinhronajiem motoriem ir ierobežots palaišanas griezes moments.
Mstart=(0,8÷1,8)Mn.
Lai iedarbinātu dzinēju, ir nepieciešams, lai tā radītais palaišanas griezes moments pārsniegtu vārpstas slodzes griezes momentu. Atkarībā no barošanas avotu jaudas un palaišanas apstākļiem tiek izmantotas dažādas palaišanas metodes, kurām ir šādi mērķi: palaišanas strāvas samazināšana un palaišanas griezes momenta palielināšana.
Izšķir šādas asinhrono motoru palaišanas metodes: tiešs savienojums ar ķēdi, iedarbināšana ar pazeminātu spriegumu, reostatiskā palaišana, motoru izmantošana ar uzlabotām palaišanas īpašībām.
2.11.1. Tiešs savienojums ar tīklu
Tas ir vienkāršākais un lētākais veids, kā sākt. Motors tiek piegādāts ar nominālo spriegumu manuāli vai ar tālvadības pulti. Tiešais pieslēgums tīklam pieļaujams, ja motora jauda nepārsniedz 5% no transformatora jaudas, ja no tā tiek barots arī apgaismojuma tīkls. Jaudas ierobežojums ir izskaidrojams ar strāvas pārspriegumiem palaišanas brīdī, kas noved pie sprieguma samazināšanās transformatora sekundāro tinumu spailēs. Ja apgaismojuma tīkls netiek piegādāts no transformatora, tad tiešo pieslēgumu tīklam var izmantot motoriem, kuru jauda nepārsniedz 25% no transformatora jaudas.
2.11.2. Iedarbināšana ar samazinātu spriegumu
Šo metodi izmanto, iedarbinot jaudīgus motorus, kuriem tiešs savienojums ar tīklu nav pieņemams. Lai samazinātu statora tinumam piegādāto spriegumu, tiek izmantoti droseles un pazeminošie autotransformatori. Pēc palaišanas tīkla spriegums tiek pievadīts statora tinumam.
Spriegums tiek pazemināts, lai samazinātu palaišanas strāvu, bet tajā pašā laikā, kā izriet no att. 2.17 un 2.17.b, starta griezes moments samazinās. Ja spriegums palaišanas brīdī tiek samazināts par koeficientu, palaišanas griezes moments samazināsies par koeficientu 3. Tāpēc šo palaišanas metodi var izmantot tikai tad, ja uz vārpstas nav slodzes, t.i. dīkstāves režīmā.
Ja saskaņā ar pases datiem motoram jābūt pieslēgtam tīklam pēc trīsstūra shēmas, tad, lai samazinātu palaišanas strāvu palaišanas laikā, statora tinums ir pievienots saskaņā ar zvaigznes shēmu.
Šīs palaišanas metodes galvenie trūkumi ir augstās palaišanas aprīkojuma izmaksas un neiespējamība iedarbināt ar slodzi uz vārpstu.
Daudzu ar asinhrono dzinēju darbināmu mehānismu darbības laikā, atbilstoši tehnoloģiskajām prasībām, rodas nepieciešamība regulēt šo mehānismu griešanās ātrumu. Asinhrono motoru griešanās frekvences (ātruma) kontroles metodes atklāj attiecību:
n=(1-S)n0=(1-S)60f/p.
No tā izriet, ka noteiktai vārpstas slodzei rotora ātrumu var regulēt:
slīdēšanas maiņa;
stabu pāru skaita izmaiņas;
mainot barošanas avota frekvenci.
2.12.1. Slīdēšanas maiņa
Šo metodi izmanto to mehānismu piedziņā, kur ir uzstādīti asinhronie motori ar fāzes rotoru. Piemēram, celšanas un transportēšanas mašīnu piedziņā. Fāzes rotora ķēdē tiek ievadīts regulēšanas reostats. Rotora aktīvās pretestības palielināšanās neietekmē kritiskā momenta lielumu, bet palielina kritisko slīdi (2.21. att.).
Uz att. 2.21 parādīti asinhronā motora mehāniskie raksturlielumi ar dažādām regulējošā reostata pretestībām Rp3> Rp2> 0, Rp1=0.
Kā izriet no att. 2.21, izmantojot šo metodi, varat samazināt lielu ātruma kontroles diapazonu. Šīs metodes galvenie trūkumi:
Sakarā ar lielajiem zudumiem uz regulēšanas reostatu, efektivitāte samazinās, t.i. neekonomisks veids.
Asinhronā motora mehāniskais raksturlielums kļūst mīkstāks, palielinoties rotora aktīvajai pretestībai, t.i. samazinās dzinēja stabilitāte.
Nav iespējams vienmērīgi regulēt ātrumu.
Šo trūkumu dēļ šī metode tiek izmantota īslaicīgai griešanās ātruma samazināšanai.
Asinhrono motoru ātruma kontrole
No formulas izriet, ka asinhronā motora rotora apgriezienu skaitu var regulēt šādos veidos: mainot barošanas sprieguma frekvenci f1, polu pāru skaitu p un slīdes lielumu s.
Frekvences regulēšana. Šī metode ļauj vienmērīgi mainīt ātrumu plašā diapazonā. Tās ieviešanai ir nepieciešams, lai dzinējs tiktu darbināts no atsevišķa avota (2.18. attēls).
Kā šāds avots pašlaik visplašāk tiek izmantoti pusvadītāju statiskie frekvences pārveidotāji.
Atkarībā no prasībām asinhronā motora mehāniskajiem parametriem frekvences regulēšanas laikā, vienlaikus ar frekvences f1 maiņu, saskaņā ar noteiktu likumu ir jāmaina statora tinumam piegādātais spriegums U1.
Maksimālais motora griezes moments ir aptuveni (neņemot vērā pretestību r1), ko nosaka (2.40),
![]() .
.
Ņemot vērā, ka ,,, mēs saņemam
Ja, kontrolējot ātrumu, ir nepieciešams, lai jebkurā frekvencē f1 maksimālais griezes moments paliktu nemainīgs (regulējums ar), tad mēs iegūstam
no kā izriet, ka, lai regulētu n2 pie ir nepieciešams mainīt statora tinumam pievadīto spriegumu U1 proporcionāli tā frekvencei. Šajā gadījumā mašīnas galvenā magnētiskā plūsma pie dažādām frekvences f1 vērtībām paliek nemainīga, t.i.
![]() (2.56)
(2.56)
Asinhronā motora mehāniskie raksturlielumi regulēšanas laikā ar Mmax = const ir parādīti 2.19. attēlā.
Frekvences regulēšanas trūkums ir salīdzinoši augstās pārveidotāju uzstādīšanas izmaksas.
Ātruma kontrole, mainot statora tinumu polu pāru skaitu. Lai īstenotu šo noteikumu, statoram kopējās rievās tiek novietoti nevis viens, bet divi tinumi
dažādiem soļiem un līdz ar to dažādam polu pāru skaitam. Atkarībā no nepieciešamā ātruma tīklam tiek pievienots viens vai otrs tinums. Šo metodi izmanto salīdzinoši reti, jo tai ir būtisks trūkums - neliela tinuma stieples izmantošana (darbojas tikai viens no tinumiem).
Daudz biežāk polu pāru skaita izmaiņas tiek panāktas, mainot (pārslēdzot) statora tinuma savienojuma shēmu. Šādas pārslēgšanas princips ir parādīts 2.20. attēlā.
Pārslēdzoties no divu spoļu seriālā savienojuma uz paralēlo, polu pāru skaits mainās no 2 uz 1. Ja uz rotora ir fāzes tinums, tas arī jāpārslēdz vienlaikus ar statora tinumu, kas ir liels trūkums. Tāpēc šī ātruma regulēšanas metode tiek izmantota tikai motoriem ar vāveres sprostu rotoru.
Asinhronos motorus ar polu pāru skaita pārslēgšanu sauc par vairāku ātrumu. Tie ir pieejami divos, trīs un četros ātrumos. Ir zināms liels skaits ķēžu, kas ļauj pārslēgt polu pāru skaitu. Šīs shēmas ir sadalītas pastāvīgas griezes momenta kontroles shēmās un nemainīgas jaudas kontroles shēmās. Divu ātrumu motoru mehāniskie raksturlielumi parādīti 2.21. attēlā.
Attēls 2.20. Polu pāru skaita maiņa, pārslēdzot tinumu spoles:
a – divi stabu pāri; b - viens stabu pāris
2.21. attēls. Divu ātrumu motora mehāniskie parametri
ar polu pāru skaita pārslēgšanu attiecībā 2:1
pie nemainīga griezes momenta (a) un pie nemainīgas jaudas (b)
No visiem veidiem, kā kontrolēt asinhrono motoru ātrumu, polu pāru skaita pārslēgšanas metode ir visekonomiskākā, lai gan tai ir arī trūkumi:
- dzinējiem ir salīdzinoši lieli izmēri un svars, salīdzinot ar parastas konstrukcijas dzinējiem;
- soļu ātruma kontrole.
Darbgaldu un dažādu mehānismu darbināšanai tiek izmantoti daudzpakāpju motori, kuru rotācijas ātrums jāregulē plašā diapazonā (piemēram, liftu asinhronie motori).
Ātruma kontrole, mainot barošanas spriegumu. Norādīto regulēšanu var veikt ar tiristoru sprieguma regulatoru PH (2.22. attēls).
Tā kā asinhronā motora griezes moments ir proporcionāls, mehāniskie raksturlielumi pie sprieguma, kas ir mazāks par nominālo spriegumu, būs zemāks par dabisko (2.23. attēls).
Ja pretestības moments MC paliek nemainīgs, tad, kā izriet no 2.23. attēla, spriegumam krītoties, motora slīdēšana.
palielinās.
Šajā gadījumā rotora ātrums samazinās.
Slīdes regulēšana šādā veidā ir iespējama iekšienē
0 < s < sкр.
Tālāka sprieguma samazināšanās (zem U1(2)) ir nepieņemama, jo šajā gadījumā Mmax.< MС и двигательостановится.
Motoru ātruma regulēšanai, mainot ieejas spriegumu U1, ir būtisks trūkums: šajā gadījumā palielinās zudumi un līdz ar to samazinās motora efektivitāte. Spriegumam proporcionāli samazinoties U1, samazinās mašīnas galvenā magnētiskā plūsma, kā rezultātā pie M = MС = const palielinās strāva rotora tinumā un līdz ar to arī elektriskie zudumi rotorā. Magnētiskie zudumi statora tēraudā ir samazināti. Parasti pie motora slodzēm, kas ir tuvu nominālajai, U1 samazināšanās izraisa kopējo zudumu palielināšanos un motora apsildes palielināšanos. Tāpēc aplūkotā ātruma kontroles metode galvenokārt tiek izmantota mazas jaudas mašīnām.
Asinhrono motoru ātruma kontrole, iekļaujot rotora ķēdē papildu aktīvo pretestību. Šo vadības metodi izmanto tikai motoros ar fāzes rotoru. Tas ļauj vienmērīgi mainīt ātrumu plašā diapazonā (2.24. Attēls). Tās trūkumi ir: lieli enerģijas zudumi papildu pretestībās, pārmērīgi “mīkstas” motora mehāniskās īpašības ar augstu pretestību rotora ķēdē. Dažos gadījumos pēdējais ir nepieņemams, jo nelielas slodzes griezes momenta izmaiņas atbilst būtiskām ātruma izmaiņām. Praksē šo metodi galvenokārt izmanto mazu motoru ātruma regulēšanai, piemēram, pacelšanas ierīcēs. ![]()
Izmantojot šo dzinēja apgriezienu regulēšanas metodi, rotora ķēdē iekļautajam regulējošajam reostatam (papildu aktīvā pretestība) jābūt konstruētam ilgstošai darbībai. Tāpēc palaišanas reostatus, kas paredzēti īslaicīgai strāvas plūsmai palaišanas periodā, nevar izmantot kā regulējošos.
No elektrotehnikas kursa ir zināms, ka, iedarbinot, asinhronie elektromotori patērē ievērojamas palaišanas strāvas no barošanas tīkla. Patiešām, palaišanas brīdī izslīdēja asinhronais elektromotors s=1, nominālajā režīmā tas nepārsniedz 0,05. Tas nozīmē, ka iedarbināšanas brīdī statora rotējošais magnētiskais lauks rotora tinumu šķērso 20 reizes biežāk.
Tomēr starta strāva statorā un rotējošie tinumi parasti nepārsniedz nominālā strāva vairāk nekā 7-8 reizes, jo palaišanas brīdī rotora ķēdes induktīvā pretestība strauji palielinās strāvas frekvences pieauguma dēļ. Ir zināms, ka jebkuras ķēdes induktīvo pretestību var noteikt ar šādu izteiksmi:
kur L- ķēdes induktivitāte.
Iedarbināšanas brīdī strāvas frekvence rotora tinumā iepriekš minētajos apstākļos ( s sākt = 1; s nom = 0,05) ir 20 reizes lielāks nekā nominālajā režīmā. Tāpēc rotora ķēdes kopējā pretestība Z = ?R 2 + x L 2 palaišanas laikā ir daudz augstāks, salīdzinot ar nominālo režīmu. Tas izskaidro faktu, ka strāva palaišanas brīdī nav 20 reizes lielāka par tās nominālvērtību, bet tikai 7-8 reizes.
Pašam elektromotoram palielinātas palaišanas strāvas nerada lielas briesmas, jo tās plūst salīdzinoši īsu laiku un tām nav laika pārkarst tinumus. Tomēr palielinātas palaišanas strāvas izraisa lielus sprieguma kritumus barošanas tīklā, kas negatīvi ietekmē citu patērētāju darbību. Tas liek izmantot vairākus īpašus pasākumus, kas ierobežo asinhrono motoru palaišanas strāvas.
Jāpatur prātā, ka asinhronajiem elektromotoriem, kuriem ir liela palaišanas strāva, ir salīdzinoši mazs sākuma griezes moments, jo palaišanas brīdī rotācijas mikroshēmas jaudas koeficients un ir ļoti zems. Asinhronā elektromotora izstrādātais griezes moments saskaņā ar izteiksmi (96) ir proporcionāls ne tikai rotora strāvai, bet arī rotora ķēdes jaudas koeficientam.
Tāpēc asinhrono elektromotoru mākslīgās palaišanas ķēdes, kas aplūkotas turpmāk, bieži vien ir vērstas ne tikai uz palaišanas strāvu samazināšanos, bet arī uz starta griezes momentu palielināšanu.
Motoru palaišana ar fāzes rotoru . Asinhronie elektromotori ar fāzes rotoru, t.i., ar rotoru ar slīdgredzeniem, tiek iedarbināti OS ar starta reostatu, kas iekļauts rotora ķēdē (skatīt att. 40, a ). Reostata ieviešana samazina palaišanas strāvu un ļauj iegūt nepieciešamo palaišanas griezes momentu līdz M Krēta . Izteiksme (93)parāda, ka slīdēšanas apjoms s Krēta , pie kura rodas maksimālais griezes moments, ir atkarīgs no rotora fāzes aktīvās pretestības. Tāpēc, izvēloties atbilstošu šīs pretestības vērtību, ir iespējams iegūt momentu, kas ir tuvu lielumam M Krēta (skat. 43. un 44. att.).
Ir ērti aprēķināt palaišanas reostatu, izmantojot grafanalītisku metodi, kurai ir daudz kopīga ar metodēm, kas iepriekš tika aplūkotas līdzstrāvas motoriem.
Lai aprēķinātu palaišanas reostatu, ir jāzina elektromotora nominālie dati un tie ir dabiski mehāniskās īpašības P = f(M): Pēdējo var viegli uzbūvēt, kā zināms, pēc diviem punktiem - ar sinhrono ātrumu pie nulles griezes momenta un pēc nominālā ātruma pie nominālā (griezes momenta. Ņemot šos datus, varat aprēķināt starta reostatu, izmantojot šādu metodi.
1. Tiek izvēlētas griezes momenta izmaiņu robežas iedarbināšanas laikā M m Ak un M min un ir attēloti sākuma diagrammā (47. att.). Izvēloties momentus, jāvadās pēc tā, lai maksimālajam starta griezes momentam būtu jābūt nedaudz mazākam par apgāšanās momentu, bet minimālajam – nedaudz lielākam par statiskās pretestības momentu. M Ar , un jo mazāka ir izvēlētā atšķirība ( M m Ak -M min ), jo vairāk soļu būs palaišanas reostatam un jo vienmērīgāk un ātrāk iedarbināsies motors.
2. Elektromotora iedarbināšanai jāsākas no punkta 1 , jo, startējot, elektromotoram saskaņā ar iepriekš pieņemto nosacījumu ir jāattīstās brīdis M m Ak plkst n= 0. Tāpēc pirmais sākuma raksturlielums a, kas atbilst pilnībā ieslēgtam palaišanas reostatam, jāiziet cauri punktiem P 0 un 1 . Motora ātrums palielināsies kā M m Ak > M c , t.i., ir lieks moments, kas piešķir mehānismam paātrinājumu. Palielinoties ātrumam, griezes moments samazināsies, un, kad tas sasniegs vērtību M min (punkts2 ) sākuma reostata pirmajam posmam jābūt izslēgtam.
3. Kad pirmais posms ir izslēgts, elektromotors pārslēdzas uz darbu no raksturlieluma a par raksturlielumu b kas atbilst iekļautajam starta reostatam bez pirmās pakāpes. Pirmā posma izslēgšanas laikā elektromotora ātrumam praktiski nav laika mainīties, tāpēc mēs varam pieņemt, ka pāreja no viena raksturlieluma uz otru notiek pa horizontālu taisnu līniju 2 -3 un raksturīgs b iet caur punktiem P 0 un 3.
4. Tālākais elektromotora paātrinājums notiek jau pēc raksturlieluma b līdz griezes moments atkal samazinās līdz vērtībai M min . Šajā gadījumā ir jāizslēdz reostata otrais posms un elektromotors pārslēgsies uz darbu atbilstoši raksturlielumam Ar. Pāreja notiek horizontālā līnijā 4 -5 , un raksturlielums c iet caur punktiem n 0 un 5 .
5. Kad, strādājot ar raksturlielumu, brīdis atkal samazinās līdz vērtībai M min , tiek izslēgts starta reostata trešais pēdējais posms un elektromotors pārslēdzas strādāt atbilstoši dabiskajam raksturlielumam d. Ar šo raksturlielumu elektromotora paātrinājums turpinās, līdz tā griezes moments kļūst vienāds ar statiskās pretestības momentu. Pēc tam paātrinājums apstāsies un motors darbosies ar vienmērīgu ātrumu.
Jāņem vērā, ka aplūkotajā gadījumā ir iepriekš izvēlēts palaišanas reostata posmu skaits. Tāpēc brīži M m Ak un M min jāizvēlas tā, lai, izslēdzot trešo posmu, elektromotors pārslēgtos uz dabisko raksturlielumu d. Ja tas nenotiek, ir nedaudz jāmaina momentu vērtības M maks un M min un atkārtojiet būvniecību. Gadījumā, ja soļu skaits nav ierobežots, būvniecība tiek veikta, līdz notiek pāreja uz dabisko īpašību. Reostata soļu skaitu šajā gadījumā nosaka sākuma diagramma.
6. Izmantojot palaišanas diagrammu (skat. 47. att.), ir viegli noteikt gan visa reostata, gan tā atsevišķu pakāpienu pretestību. Ir viegli pierādīt, ka segments 7 -9 pretestību skalā attēlo rotora tinuma fāzes un segmenta aktīvo pretestību 1 - 7 tajā pašā mērogā - starta reostata fāzes kopējā aktīvā pretestība. Segmenti 1 -3 , 3 -5 un 5 -7 apzīmē attiecīgi starta reostata pirmās, otrās un trešās pakāpes aktīvo pretestību vērtības.
Pretestības skalu var noteikt pēc izteiksmes
kur 7 -9 - segments diagrammā garuma vienībās;
R 2 - rotora vienas fāzes aktīvā pretestība, ko var ņemt no elektromotora datu plāksnītes datiem vai noteikt ar mērījumu vai aptuvenu aprēķinu, izmantojot formulu
kur s- nominālā slīdēšana;
t 2 - rotora fāžu skaits;
es 2 - nominālā strāva rotora fāzē;
M- nominālais griezes moments.
Apsvērtā metode asinhrono elektromotoru palaišanai ar fāzes rotoru ir vienkārša un uzticama. Tas ļauj samazināt palaišanas strāvu un, ja nepieciešams, palielināt starta griezes momentu līdz apgāšanās griezes momentam. Šīs metodes trūkums jāuzskata par ievērojamiem enerģijas zudumiem sākuma reostatos, kā arī pēdējo lielo izmēru ar lielu skaitu soļu. Lai izvairītos no pārāk apjomīgu palaišanas reostatu izmantošanas, celtņu ķēdēs bieži izmanto reostatus ar tā saukto asimetrisko ķēdi, kad pretestība tiek izvadīta nevis vienlaicīgi no trim rotora ķēdes fāzēm, bet gan pakāpeniski.
Sākotnējā palaišanas brīdī visa pretestība tiek ievadīta elektromotora rotora ķēdē. Tad pamazām, elektromotoram paātrinoties, ar trumuļa vai izciļņa kontroliera palīdzību no pirmās fāzes ķēdes tiek noņemta pirmā pretestības pakāpe, tad otrā, tad trešā; nākamajā kontrollera pozīcijā otrā pretestības pakāpe tiek noņemta no pirmās fāzes ķēdes un tā tālāk, līdz kontrollera pēdējā pozīcijā tiek noņemta visa pretestība un tiek īssavienota rotora ķēde.
Šī palaišanas metode rada zināmu rotora ķēdes strāvu asimetriju, kas tomēr nerada briesmas elektromotoram un vienlaikus ļauj nedaudz samazināt palaišanas reostatu un regulatoru izmērus.
Elektromotoru palaišana ar vāveres sprostu rotoru.
Jaudīgu asinhrono elektromotoru iedarbināšana ar vāveres sprostu rotoru ir saistīta ar vairākām grūtībām, jo iedarbināšanas strāvu ierobežošana, ieviešot papildu pretestības. šajā gadījumā rotora ķēdi nevar izmantot. Materiālu apstrādes iekārtās parasti tiek izmantoti elektromotori ar salīdzinoši mazas jaudas vāveres rotoru, kā rezultātā parasti nav jāierobežo palaišanas strāvas.
Piegādājot vāveres asinhrono motoru no elektrotīkla, iedarbināšana vairumā gadījumu tiek veikta, pievienojot statora tinumu pilnam tīkla spriegumam, kā parādīts attēlā. 48, a.
Ja elektromotora jauda ir samērīga ar tīkla jaudu, palaišanas strāvas izraisa nepieņemami lielus sprieguma kritumus, kas pasliktina citu no tā paša tīkla darbināmo patērētāju darba apstākļus; šajā gadījumā ir jāveic pasākumi, lai ierobežotu palaišanas strāvas.
Iedarbinot ar tiešu pārslēgšanu uz pilnu spriegumu, statora tinumu pieslēdz tīklam, vienkārši ieslēdzot atbilstošo ierīci – naža slēdzi, kontaktoru, magnētisko starteri u.c.. Šajā gadījumā ir starta strāvas pārspriegums, kas ir 7 -8 reizes lielāka par elektromotora nominālo strāvu. Jāpatur prātā, ka strāvas pieaugums palaišanas brīdī nav atkarīgs no slodzes, bet gan no motora tinumu pretestības vērtības un tīkla sprieguma. Šajā sakarā, ja rodas nepieciešamība samazināt palaišanas strāvas, iedarbināšanas brīdī elektromotoram tiek piegādāts samazināts spriegums.
Statora tinumam piegādāto spriegumu var samazināt:
a) statora tinuma pārslēgšana no zvaigznes uz trīsstūri;
b) ar statora ķēdē iekļautās aktīvās pretestības palīdzību;
c) izmantojot autotransformatoru.
Visām šīm metodēm kopīgs ir motora palaišanas strāvas samazināšana, vienlaikus samazinot tā palaišanas griezes momentu, kas, kā jūs zināt, ir proporcionāls sprieguma kvadrātam. Tas nozīmē, ka aplūkotā palaišanas metode ir piemērojama tikai nelielos pretestības momentos.
Sākot ar statora tinuma pārslēgšanu no zvaigznes uz trīsstūri, visbiežāk izmanto asinhronajiem elektromotoriem ar vāveres stieņa rotoru, kurā normālas darbības laikā statora tinums ir savienots trīsstūrī. Ķēdes darbības princips (48. att., b) sastāv no tā, ka sākotnējā palaišanas periodā statora tinumu ieslēdz zvaigzne un savieno ar tīklu. Kad elektromotors attīsta noteiktu ātrumu, tinums tiek pārslēgts uz trīsstūri. Ir acīmredzams, ka palaišanas strāvas vērtība, savienojot ar zvaigzni, ir 3 reizes mazāka nekā savienojot ar trīsstūri, jo katrai elektromotora fāzei pievadītais spriegums pirmajā gadījumā ir 3 reizes mazāks nekā otrais gadījums. Tiesa, starta griezes moments būs trīs reizes mazāks. Kā parādīts attēlā. 48, b, nav nepieciešams sarežģīts aprīkojums, lai šādā veidā iedarbinātu elektromotoru. Elektromotora iedarbināšanu veic parasts trīspolu slēdzis R.
Salīdzinoši reti tiek izmantota neekonomiska palaišanas metode ar statora tinuma ķēdē iekļautās aktīvās pretestības palīdzību. Šo palaišanas metodi izmanto tikai gadījumos, kad elektromotora statora tinums normālas darbības laikā ir jāieslēdz ar zvaigzni. Startējot, slēdzis vispirms aizveras. R 1 (48. attēls, iekšā). Šajā gadījumā statora tinums ir savienots ar tīklu caur reostatu R. Kad elektromotors attīsta noteiktu apgriezienu skaitu, naža slēdzis aizveras R 2 un reostats ir manevrēts.
Diezgan reti tiek izmantota arī asinhrono elektromotoru iedarbināšana, izmantojot autotransformatoru. Šajā gadījumā pirmajā palaišanas periodā sešu polu slēdzis P(48. attēls, G) ir novietots vietā 1 un uz statora spailēm caur autotransformatoru T tiek pielietots zemspriegums. Kad elektromotors paātrina, slēdzis tiek novietots pozīcijā 2 un stators ir zem pilna tīkla sprieguma.
Kopīgs trūkums visām aplūkotajām metodēm asinhrono elektromotoru iedarbināšanai ar vāveres būra rotoru no zemspriegums ir ievērojams starta griezes momenta samazinājums.
Lai ierobežotu palaišanas strāvu, vienlaikus nesamazinot palaišanas griezes momentu, palaišanas laikā ir jāpalielina rotora tinuma pretestība. Lai to izdarītu, uz rotora tiek uzlikti nevis viens, bet divi īsslēgti tinumi (divu šūnu elektromotori) vai izgatavoti rotori ar tā saukto dziļo rievu.
Divu šūnu asinhronajiem motoriem un dziļo spraugu motoriem ir liels palaišanas griezes moments un zemāka starta strāvas attiecība nekā vāveres dzinēji parastā izpildījumā, tomēr pirmās izmaksas ir daudz augstākas un tās tiek izmantotas salīdzinoši reti.