Mūsdienās asinhronie motori ir visizplatītākie elektroenerģijas patērētāji pasaulē un tiek izmantoti visur, sākot no sadzīves tehnikas, piemēram, putekļu sūcēja, ledusskapja vai ventilatora, līdz lielām rūpnieciskām iekārtām, kurās elektromotoru jaudu mēra megavatos. to sūkņu stacijas, konveijeri, kalnrūpniecības iekārtas, ventilācijas vai dūmu novadīšanas sistēmas utt. Saskaņā ar statistiku pasaulē tiek izmantoti aptuveni 300 miljoni trīsfāzu asinhrono elektromotoru ar spriegumu 380 V.
Katru gadu aptuveni 10% šo elektromotoru sabojājas nepareizas darbības, pārslodzes vai avārijas darbības dēļ. Bieži neveiksme ir saistīta ar palaišanas procesu asinhronais motors, kad tam jāiegūst nominālais ātrums mehānismos ar lielu inerces momentu. Attiecīgi asinhronā motora sākuma moments ir smags režīms strādāt ar lielu mehānisko un elektriskā slodze. Asinhronā elektromotora palaišanas strāvas var pārsniegt nominālās strāvas 10 - 12 reizes.
Iedarbināšanas elektromotoru veidi un to īpašības
Asinhronā elektromotora tieša iedarbināšana- šī ir vistradicionālākā palaišanas metode, kas tiek izmantota kopš elektromotoru parādīšanās līdz mūsdienām. Šis ir tehniski vienkāršākais un izmaksu ziņā izdevīgākais risinājums, kas ļauj iedarbināt elektromotoru plkst nominālais spriegums. Ar šo palaišanas metodi tiek izmantots minimāls komutācijas iekārtu komplekts, taču šobrīd to galvenokārt izmanto nelielas jaudas elektromotoru iedarbināšanai noteiktu trūkumu dēļ, ko var iedalīt 2 kategorijās: elektriskā un mehāniskā.
Elektrības problēmas:
Ar tiešu asinhronā elektromotora iedarbināšanu notiek diezgan liels strāvas pārsprieguma pieaugums, kas noved pie sprieguma krituma barošanas tīklā. Un tas var izraisīt arī aizsardzības darbību, īpaši gadījumos, kad elektromotora aizsardzībai netiek izmantotas īpašas ierīces. Turklāt ilgstošas palaišanas gadījumā ilgstoša strāvas plūsma, kas 6-8 reizes pārsniedz nominālo strāvu, būtiski ietekmē gan elektromotoram pievienoto kabeli, gan asinhronās elektriskās tinumus. motors, kas palielina to nodilumu.
Mehāniskās problēmas:
Liels sākotnējais palaišanas griezes moments var izraisīt ievērojamu triecienu un līdz ar to ievērojamu slodzi uz motora piedziņas mehānismiem, piemēram, siksnām vai gultņu bloka stiprinājumiem. Tādējādi tie saīsina kalpošanas laiku vai pilnībā neizdodas. Īpaši kritiskās nozarēs iekārtu dīkstāve remontdarbu laikā var radīt ievērojamus zaudējumus. Apstājoties, kā arī iedarbinot, ir spēcīgas mehāniskas vibrācijas, ko izraisa pārejas apstākļi. Viņi neļauj sinhronais darbs vairāki neatkarīgi mezgli sarežģītās mašīnu līnijās vai instalācijās.
Star-delta sākums, ir arī viens no labi zināmajiem asinhrono motoru iedarbināšanas veidiem. Šo metodi izmanto, lai samazinātu mehānisko spriegumu un ierobežotu ieslēgšanas strāvu. Bet tam ir arī vairāki trūkumi. Pirmkārt, elektromotoram jābūt 6 spailēm strāvas pieslēgšanai. Otrkārt, palaišanai saskaņā ar šo shēmu ir nepieciešami 3 kontaktori, kas atkal palielina instalācijas izmaksas un izmērus. Pārejot no zvaigžņu ķēdes uz trijstūra ķēdi, strāvas pārspriegums, kaut arī īslaicīgs, bet liels amplitūdā, joprojām notiek. Treškārt, no vadības punkta līdz elektromotoram ir jāizmanto divi kabeļi, kas garu līniju gadījumā ir diezgan dārgi. Un pēdējais trūkums ir tāds, ka motora apturēšana ar līdzīgu savienojuma shēmu ir tieši tāda pati kā ar tiešo palaišanu.
Trešais veids, kā sākt mīksto starteru izmantošana.
Mīkstais starteris ir mehāniska, elektroniska vai elektromehāniska ierīce, ko izmanto, lai mīksti iedarbinātu vai apturētu elektromotorus. Izmantojot mīksto starteri, ir iespējams vienlaikus nodrošināt vienmērīgu paātrinājumu un asinhronā elektromotora apturēšanu, lai panāktu uzlabotu stabilitāti elektriskie tīkli, tas ir, lai samazinātu strāvas pārspriegumu palaišanas laikā un ievērojami samazinātu sprieguma kritumus tīklā sarežģītas palaišanas laikā. Turklāt mīkstās palaišanas sistēmu izmantošana samazina iekārtu mehāniskās pārslodzes palaišanas un izslēgšanas laikā, samazina mehānismu nodilumu un tādējādi palielina asinhrono elektromotoru, pārnesumkārbu, sajūgu un citu piedziņas daļu kalpošanas laiku. Tāpēc optimālākais risinājums attiecībā uz funkcionalitātes attiecību - izmaksas par asinhrono elektromotoru iedarbināšanu, ja nav nepieciešama pastāvīga ātruma kontrole, ir mīkstie starteri.
Frekvences pārveidotāja izvēle
Raksturojot frekvences pārveidotāju noteiktai slodzei, pirmais solis ir ņemt vērā slodzes raksturlielumus. Ir četri dažādi veidi, kā aprēķināt nepieciešamos izejas parametrus, izvēloties metodi atkarībā no motora īpašībām.
Slodzes raksturlielumi
Pirms frekvences pārveidotāja izmēra noteikšanas ir jānošķir divi visbiežāk izmantotie slodzes rādītāji. Slodzes raksturlielumi atšķiras viens no otra šādi:
Rīsi. 1. Pastāvīgais un kvadrātiskās slodzes moments
Palielinoties centrbēdzes sūkņu un ventilatoru ātrumam, enerģijas patēriņš palielinās līdz trešajai jaudai (P = n 3).
Centrbēdzes sūkņu un ventilatoru parastais darbības diapazons ir no 50% līdz 90%. Slodzes koeficients palielinās līdz ar ātruma kvadrātu, t.i., aptuveni par 30 līdz 80%.
Abi šie faktori parādās frekvences pārveidotāja kontrolētā motora griezes momenta raksturlielumos.
2. un 3. attēlā parādīti griezes momenta raksturlielumi divu izmēru frekvences pārveidotājiem, vienam (3. attēls) ir mazāks jaudas diapazons nekā otram. Abiem griezes momenta raksturlielumiem tika piešķirti tādi paši slodzes raksturlielumi kā centrbēdzes sūknim.
Uz att. 2 viss sūkņa darbības diapazons (0-100%) ir motora parametru nominālo vērtību robežās. Tā kā sūkņa parastais darbības diapazons ir no 30% līdz 80%, var izvēlēties frekvences pārveidotāju ar mazāku izejas jaudu.

Rīsi. 2. Lieljaudas frekvences pārveidotājs
Rīsi. 3. Mazjaudas frekvences pārveidotājs
Ja slodzes griezes moments ir nemainīgs, motoram jāspēj nodrošināt lielāku griezes momentu nekā slodzes griezes momentu, jo lieko griezes momentu izmanto paātrinājumam.
Paātrinājumam un lielam sākuma griezes momentam, piemēram, lentes konveijera piedziņām, pietiek ar īslaicīgu pārslodzes griezes momentu, kas ir 60% no frekvences pārveidotāja izstrādātā griezes momenta. Pārslodzes griezes moments nodrošina sistēmai arī spēju tikt galā ar pēkšņu slodzes pieaugumu. Frekvences pārveidotājs, kas nepieļauj pārslodzes griezes momentu, ir jāizvēlas tā, lai paātrinājuma griezes moments (T B) būtu nominālā griezes momenta robežās.
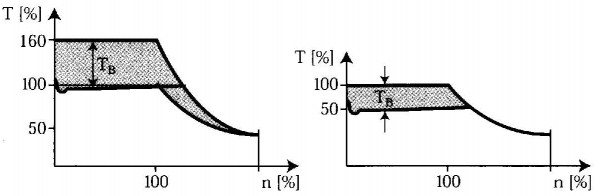
Rīsi. 4. Paātrinājumam tiek izmantots pārslodzes griezes moments
Nosakot slodzes raksturlielumus, tiek ņemti vērā četri dažādi komplekti specifikācijas motors, ļaujot jums pieņemt lēmumus par frekvences pārveidotāja izmēra izvēli jaudas ziņā.
1. Frekvences pārveidotāju var izvēlēties ātri un precīzi, pamatojoties uz strāvas vērtību l M, ko velk motors. Ja motors nav pilnībā noslogots, tā strāvu var izmērīt ar līdzīgu sistēmu, kas darbojas ar pilnu slodzi.

Rīsi. 5.
Elektromotors 7,5 kW, 3 x 400 V patērē strāvu 14,73 A.
Attiecībā uz frekvences pārveidotāja tehniskajiem datiem tiek izvēlēts frekvences pārveidotājs, kura nepārtrauktā maksimālā izejas strāva ir lielāka vai vienāda ar 14,73A ar nemainīgu vai kvadrātiskā griezes momenta raksturlielumu.
Piezīme:
Ja frekvences pārveidotājs tiek izvēlēts, pamatojoties uz jaudu (2.-4. metode), ir jāsalīdzina aprēķinātā jauda un frekvences pārveidotāja tehniskajos datos norādītā jauda pie tāda paša sprieguma. Ja frekvences pārveidotājs aprēķina no strāvas (1. metode), tas nav nepieciešams, jo frekvences pārveidotāja izejas strāva ietekmē citus datus.
2. Frekvences pārveidotāju var izvēlēties, pamatojoties uz pilna jauda S M , ko patērē elektromotors un šķietamā jauda, ko piegādā frekvences pārveidotājs.
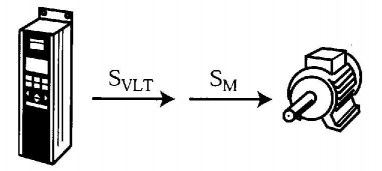
Rīsi. 6.
Frekvences pārveidotāja aprēķina un izvēles piemērs:
Elektromotors 7,5 kW, 3x400 V patērē strāvu 14,73 A. Sm \u003d U x I x √3 / 1000 = 400 x 14,73 √3 / 1000 = 10,2 kVA
Attiecībā uz frekvences pārveidotāja tehniskajiem datiem izvēlieties frekvences pārveidotāju, kura nepārtrauktā maksimālā izejas jauda ir lielāka vai vienāda ar 10,2 kVA pie nemainīga vai kvadrātiskā griezes momenta.
3. Frekvences pārveidotāju var izvēlēties arī pēc elektromotora radītās jaudas R m. Tomēr šī metode ir neprecīza, jo cos φ un koeficients noderīga darbībaη izmaiņas ar slodzi.

Rīsi. 7.
Elektromotora jaudas aprēķināšanas piemērs
3 kW elektromotors ar cos φ = 0,80 un η = 0,81 patērē jaudu S M = P M / (η x cos φ) = 3,0 / (0,80 x 0,81) = 4,6 kVA
Attiecībā uz frekvences pārveidotāja tehniskajiem datiem tiek izvēlēts frekvences pārveidotājs, kura nepārtrauktā maksimālā izejas jauda ir lielāka vai vienāda ar 4,6 kVA pie nemainīga vai kvadrātiskā griezes momenta raksturlīknes.
4. Praksē nominālā jauda Lielākā daļa frekvences pārveidotāju atbilst standarta asinhrono motoru sērijām. Tāpēc frekvences pārveidotājus bieži izvēlas, pamatojoties uz šo apsvērumu, kas tomēr var izraisīt neprecīzu to raksturlielumu noteikšanu, īpaši, ja motors nav pilnībā noslogots.

Rīsi. astoņi.
Strāvas sadalījums frekvences pārveidotājā (motora cos φ (phi))
Strāvu motora magnetizēšanai piegādā kondensators, kas atrodas frekvences pārveidotāja starpshēmā. Magnetizējošā strāva ir reaktīvā strāva, kas plūst starp kondensatoru un motoru (9. att.).

Rīsi. 9. Strāvas frekvences pārveidotājā
No tīkla nāk tikai aktīvā strāva (l W). Tāpēc frekvences pārveidotāja izejas strāva vienmēr ir lielāka par ieejas strāvu. Papildus aktīvajai strāvai no tīkla tiek patērēta strāva I loss , (zaudējuma strāva).
Aprēķinu piemērs
Bez slodzes 1,1 kW 4 polu motora strāva ir 1,6 A. Pieslēgtā frekvences pārveidotāja izejas strāva ir aptuveni 1,6 A, un ieejas strāva, strādājot bez slodzes, ir gandrīz nulle.
Motoru ražotāji parasti norāda motora cos φ pie nominālās strāvas. Ar mazāku cos φ vērtību (piemēram, sinhronā pretestības motora gadījumā) motora nominālā strāva pie tās pašas vērtības jauda un spriegums būs lielāki, kā redzams no šāda vienādojuma:
I S = I W / cos φ
Ja frekvences pārveidotājs ir izvēlēts, pamatojoties uz motora nominālo strāvu (1. metode), tad motora nominālais griezes moments netiek samazināts.
Kondensators savienots ar motora spailēm kompensācijai reaktīvā strāva, ir jānoņem. Frekvences pārveidotāja augstās pārslēgšanas frekvences dēļ kondensators darbojas kā īssavienojums un izraisa ievērojamu motora strāvas palielināšanos. Invertors to interpretēs kā zemējuma defektu vai īssavienojumu un atvienojumu.
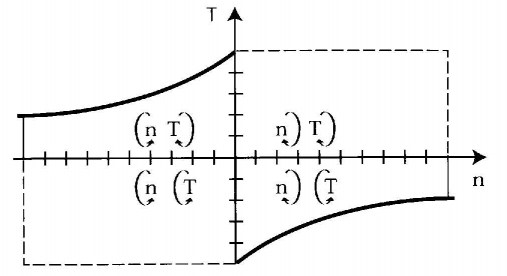
Motora ātruma kontrole
Frekvences pārveidotāja izejas frekvenci un līdz ar to arī motora ātrumu kontrolē viens vai vairāki signāli (0-10V, 4-20mA vai sprieguma impulsi). Kad tiek dots ātruma palielināšanas signāls, motora ātrums palielinās un motora griezes momenta līknes vertikālā daļa nobīdās pa labi (10. att.).

Rīsi. 10. Vadības signāla un motora griezes momenta raksturlielumu saistība
Ja slodzes griezes moments ir mazāks par motora nominālo griezes momentu, ātrums sasniegs nepieciešamo vērtību. Kā parādīts attēlā. 11, slodzes raksturlielumi krustojas ar elektromotora griezes momenta raksturlielumiem vertikālajā daļā (punktā A). Ja krustojums notiek horizontālajā daļā (punkts B), motora ātrums nevar ilgstoši pārsniegt atbilstošo vērtību, frekvences pārveidotājs ļauj pārsniegt strāvas ierobežojumu īssavienojums bez izslēgšanas (punkts C), bet pārsnieguma ilgumam noteikti jābūt ierobežotam laikā.

Rīsi. 11. Motora strāva uz īsu brīdi var pārsniegt strāvas ierobežojumu
Paātrinājuma un palēninājuma rampas
Paātrinājuma raksturlielums (rampa) parāda ātrumu, ar kādu notiek ātruma palielināšanās, un tiek iestatīts kā paātrinājuma laiks t acc . Šīs rampas galvenokārt ir balstītas uz nominālo motora frekvenci, piemēram, 5 s paātrinājuma rampa nozīmē, ka frekvences pārveidotājam būs nepieciešamas 5 sekundes, lai pārietu no nulles uz nominālo motora frekvenci (f = 50 Hz).

Rīsi. 12. Paātrinājuma un palēninājuma laiks
Palēninājuma rampa parāda, cik ātri ātrums samazinās. To norāda kā palēninājuma laiku t dec .
Iespējama tieša pāreja no paātrinājuma uz palēninājumu, jo motors vienmēr seko invertora izejas frekvencei.
Ja ir zināms motora vārpstas inerces moments, var aprēķināt optimālos paātrinājuma un palēninājuma laikus.
tac \u003d J x (n 2 - n 1) / [(T acc - T fric) x 9,55]
tdec = J x (n 2 - n 1)/[(T acc + T fric) x 9,55]
J ir motora vārpstas inerces moments.
T fric ir sistēmas berzes moments.
Tass - paātrinājumam izmantotais pārmērīgais (pārslodzes) griezes moments.
T dec ir bremzēšanas griezes moments (bremzēšanas griezes moments), kas rodas, kad ātruma atsauce samazinās.
n 1 un n 2 - griešanās ātrumi pie frekvencēm f 1 un f 2 .
Ja frekvences pārveidotājs spēj īslaicīgi nodrošināt pārslodzes griezes momentu, tad paātrinājuma un palēninājuma griezes momenti tiek iestatīti uz nominālo motora griezes momentu T. Praksē paātrinājuma laiks un palēninājuma laiks parasti ir vienādi.
Aprēķinu piemērs
J = 0,042 kgm 2, T fric = 0,05 x M N, n 1 \u003d 500 apgr./min, n 2 = 1000 apgr./min., T N = 27 Nm
tacc \u003d J x (n 2 - n 1) / [(T ass. s]
Dinamiskā bremzēšana
Kad ātruma atskaites signāls samazinās, motors darbojas kā ģenerators un bremzē. Palēninājums bremzēšanas laikā ir atkarīgs no motora slodzes lieluma.
Elektromotori, kas savienoti tieši ar tīklu, padod bremzēšanas jaudu atpakaļ tīklā.
Ja motoru darbina frekvences pārveidotājs, bremzēšanas enerģija tiek uzkrāta frekvences pārveidotāja starpshēmā. Ja bremzēšanas jauda ir liela un frekvences pārveidotājs nevar to izkliedēt pēc savas konstrukcijas, starpposma ķēdes spriegums palielinās.
Starpķēdes spriegums var pieaugt, līdz frekvences pārveidotājs tiek atspējots ar aizsardzību, un dažreiz starpķēde ir jānoslogo ar bremžu moduli un ārējo rezistoru, lai absorbētu bremzēšanas jaudu.?
Bremzēšanas moduļa un bremzēšanas rezistora izmantošana nodrošina ātru bremzēšanu smagas kravas. Tomēr ir problēmas, kas saistītas ar apkuri. Vēl viens risinājums ir izmantot reģeneratīvo bremžu bloku. Šādi bloki tiek izmantoti frekvences pārveidotājiem ar nekontrolētu taisngriezi un atgriež bremzēšanas enerģiju piegādes tīklā.
Frekvences pārveidotājos ar vadāmiem taisngriežiem bremzēšanas jaudu var atgriezt tīklā (skat. 13. att.), izmantojot, piemēram, invertoru, kas savienots antiparalēli ar taisngriezi.

Rīsi. 13. Bremžu moduļa un bremzēšanas rezistora ieslēgšana

Rīsi. 14. Back-to-back invertors
Vēl viens veids, kā bremzēt elektromotoru, ir bremzēšana līdzstrāva. Par radīšanu magnētiskais lauks stators izmanto līdzstrāvas spriegumu, kas tiek pievadīts starp divām motora fāzēm. Tā kā bremzēšanas enerģija paliek motorā un ir iespējama pārkaršana, līdzstrāvas bremzēšanu ieteicams izmantot zema ātruma diapazonā, lai nepārsniegtu motora nominālo strāvu. Parasti līdzstrāvas bremzēšana ir ierobežota laikā.?
Reverss
Asinhrono motoru griešanās virzienu nosaka barošanas sprieguma fāžu secība.
Ja divas fāzes ir apgrieztas, motora griešanās virziens mainīsies un tas griezīsies pretējā virzienā.
Lielākā daļa elektromotoru ir paredzēti, lai motora vārpsta grieztos pulksteņrādītāja virzienā, ja savienojums tiek veikts šādi:

Rīsi. 15. Elektromotora griešanās virzienu maina, mainot fāžu secību
Tas pats noteikums attiecas uz vairuma frekvences pārveidotāju izejas spaiļu fāžu secību.
Frekvences pārveidotājs var mainīt motoru, elektroniski mainot fāžu secību. Reverss tiek veikts, vai nu iestatot negatīvu ātrumu, vai ar digitālo ievades signālu. Ja motoram sākotnējās nodošanas ekspluatācijā laikā ir nepieciešams noteikts griešanās virziens, ir jāzina frekvences pārveidotāja rūpnīcas noklusējuma iestatījums.
Tā kā frekvences pārveidotājs ierobežo motora strāvu līdz nominālajai vērtībai, frekvences pārveidotāja vadīto motoru var mainīt biežāk nekā tiešās darbības motoru.
Rīsi. 16. Invertora bremzēšanas moments atpakaļgaitā
Rampas
Visiem frekvences pārveidotājiem ir rampas funkcijas, lai nodrošinātu vienmērīgu darbību. Šīs rampas var mainīt un pateicoties tām noteiktā intervālā palielināt vai samazināt ātruma atskaiti.
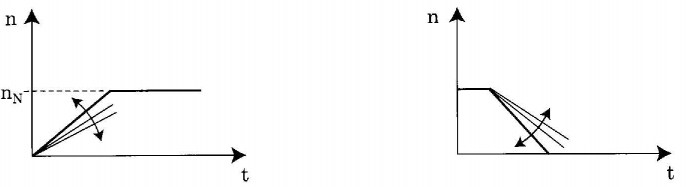
Rīsi. 17. Regulējams paātrinājuma un palēninājuma laiks
Paātrinājuma/palēninājuma slīpumu (paātrinājuma/palēninājuma ilgumu) var iestatīt tik mazu, ka dažās situācijās motors nespēs izpildīt uzdevumu (nevar paātrināt/palēnināt motoru noteiktā laikā).
Tādējādi motora strāva palielinās, līdz tiek sasniegta strāvas robeža. Īsa palēninājuma laika (t-a) gadījumā starpķēdes spriegums var pieaugt līdz tādam līmenim, ka frekvences pārveidotāja aizsardzības ķēde apturēs frekvences pārveidotāju.
Optimālo rampas laiku var aprēķināt, izmantojot tālāk norādītās formulas.
t a = J x n/[(T N -T fric)x9,55]
t-a = J x n/[(T N + T fric)x9,55]
t a - ātruma palielināšanas laiks
t -a - palēninājuma laiks
n - apgriezienu skaits
T N - elektromotora nominālais griezes moments
T fric - berzes moments

Rīsi. 18. Rampas laika iestatīšana
Paātrinājuma/palēninājuma laiku parasti izvēlas, pamatojoties uz motora nominālo apgriezienu skaitu.
strāvas kontrole
Frekvences pārveidotāji var uzraudzīt kontrolēto procesu un iejaukties kļūmes gadījumā.
Šādu vadību var iedalīt trīs veidos atkarībā no objekta: procesa iekārtas vadība, elektromotora vadība un frekvences pārveidotāja vadība.
Uzstādīšanas kontrole pamatojoties uz izejas frekvences, izejas strāvas un motora griezes momenta kontroli. Pamatojoties uz šiem parametriem, var iestatīt vairākus ierobežojumus, kuru pārsniegšana ietekmē vadības funkciju. Šie ierobežojumi var būt atļautais zemākais motora ātrums (minimālā frekvence). maksimālā strāva(strāvas ierobežojums) vai pieļaujamais maksimālais motora griezes moments (griezes momenta ierobežojums).
Frekvences pārveidotāju var ieprogrammēt, piemēram, tā, lai tas izdotu brīdinājuma signālu, samazinātu motora ātrumu vai apturētu pēdējo, ja tā ātrums pārsniedz iestatītās robežas.
Piemērs
Instalācijās, kurās motora savienošanai ar pārējo sistēmu tiek izmantota ķīļsiksna, frekvences pārveidotāju var ieprogrammēt, lai uzraudzītu ķīļsiksnas stāvokli.
Tā kā siksnas pārrāvuma gadījumā izejas frekvence palielināsies ātrāk nekā iestatītā rampa, šādās situācijās varat izmantot šo frekvenci, lai brīdinātu vai apturētu motoru.
Motora vadība to var izdarīt ar frekvences pārveidotāju, uzraugot motora termisko shēmu vai pievienojot motoram termistoru. Frekvences pārveidotājs var novērst motora pārslodzi, darbojoties kā siltuma relejs. Izejas frekvence ir iekļauta arī frekvences pārveidotāja veiktajos aprēķinos. Tas nodrošina, ka motors netiek pārslogots pie maziem apgriezieniem sliktas iekšējās ventilācijas dēļ. Mūsdienu frekvences pārveidotāji spēj aizsargāt arī ventilējamos motorus, ja strāva kļūst pārāk augsta.
Frekvences pārveidotāja vadība tradicionāli izgatavots tā, ka pārstrāvas gadījumā pārveidotājs tiek izslēgts. Daži pārveidotāji pieļauj īslaicīgu pārstrāvu. Frekvences pārveidotājā esošais mikroprocesors spēj vienlaicīgi ņemt vērā motora strāvas vērtību un tās pielietošanas laiku, kas ļauj optimāla izmantošana frekvences pārveidotājs bez pārslodzes.
Saskaņā ar Danfoss teikto
Iedarbināšanas brīdī, t.i., pieliekot spriegumu stacionāram elektromotoram, tā pretestība ir maza un rotora strāvai ir maksimālā vērtība. Attiecīgi statora strāvai ir arī maksimālā vērtība. Statora strāvu, iedarbinot motoru, sauc par palaišanas strāvu. Elementāri sākuma strāva vienāds ar trīsfāzu īssavienojuma strāvu pēc pretestības, kas vienāda ar stacionāra motora pretestību. Palaišanas strāva sastāv no mainīgas sastāvdaļas, kas samazinās, palielinoties ātrumam, un aperiodiskas sastāvdaļas, kas samazinās vairākos periodos. Pagriežoties, elektromotora patērētā strāva sākumā mainās maz, un, tikai tuvojoties sinhronajam ātrumam, tā strauji samazinās. Tas izskaidrojams ar motora pretestības izmaiņu raksturu. Elektromotora ar stacionāru rotoru palaišanas strāvas periodiskā sastāvdaļa ir 4-8 reizes lielāka par maksimālo strāvu, ņemot vērā aperiodisko komponentu, tā sasniedz:
Elektromotoru iedarbināšanas ilgums, kā likums, nepārsniedz 10-15 s, un tikai elektromotoriem ar sarežģītiem palaišanas apstākļiem šī vērtība var būt daudz ilgāka.
Padeves tīkla īssavienojuma gadījumā netālu no elektromotora spailēm, pēdējais, pateicoties iekšējam EML, ko atbalsta magnētiskā lauka enerģija, nosūta strauji dilstošu strāvu uz īssavienojuma vietu. Īsslēguma pārspriegumi var sasniegt ieslēgšanas strāvas. Elektromotoru griezes momenta atkarību no sprieguma izsaka ar formulu:
Ar īssavienojumu tīklā samazinās spriegums elektromotoru spailēs. Tā rezultātā elektromotoru momenti samazinās, un tie sāk palēnināties, palielinot slīdēšanu, līdz atkal tiek atjaunota vienlīdzība. Ja tajā pašā laikā izrādās, ka elektromotors būs uz stabilas darbības robežas un tā slīdēšana ir vienāda ar kritisko. Ar turpmāku sprieguma samazināšanos elektromotors tiks bremzēts, līdz tas pilnībā apstāsies. Pēc īssavienojuma izslēgšanas barošanas spriegums tiek atjaunots, un elektromotora turpmākā darbība būs atkarīga no slīdēšanas, kas notika sprieguma atjaunošanas laikā, un atbilstošajām vērtībām
Kad elektromotors ieslēgsies normālā ātrumā un kad M d< М с turpinās samazināties, līdz pilnībā apstāsies. Šajā gadījumā elektromotors ir jāizslēdz, jo tas patērēs palaišanas strāvu, nepaspējot apgriezties.
Elektromotoru pašpalaišana smagāks par parasto startu. Tas izskaidrojams ar to, ka pašpalaišanas laikā elektromotori tiek iedarbināti noslogoti, bet elektromotori ar fāzes rotoru - bez palaišanas reostata rotora ķēdē, kas samazina palaišanas griezes momentu un palielina palaišanas strāvu un, visbeidzot, vienlaikus ieslēdzas liels skaits elektromotoru, kas izraisa sprieguma kritumu barošanas tīklā no kopējās palaišanas strāvas. Tomēr elektromotoru pašpalaišana ir salīdzinoši vienkārša. Tātad elektromotoru pašpalaišana elektrostaciju palīgvajadzībām ir iespējama arī tajos gadījumos, kad pirmajā brīdī pēc sprieguma atjaunošanas tā vērtība ir.Šajā gadījumā kopējais pašpalaišanās laiks nepārsniedz 30- 35 s, kas ir pieļaujams to apkurei.
Pārrāvuma gadījumā vienā no statora tinuma fāzēm elektromotors turpina darboties. Šajā gadījumā rotora ātrums nedaudz samazinās, un divu darbībā atlikušo fāžu tinumi tiek pārslogoti ar strāvu, kas ir 1,5-2 reizes lielāka par nominālo. Aizsardzība pret darbību divās fāzēs iepriekš tika izmantota tikai elektromotoriem līdz 500 V, aizsargātiem ar drošinātājiem, ja divfāzu darbība varēja izraisīt elektromotora bojājumus. Pašlaik, ņemot vērā augstsprieguma motoru augsto cenu un lielo nepilnas fāzes režīmu iespējamību apgādes tīklā, tiek uzskatīts par piemērotu, neieviešot īpaša aizsardzība no divfāžu darbības, atvienojiet motorus ar pārslodzes aizsardzību, kurai ir šim nolūkam piemērots iestatījums.Strāvas pārslodzes aizsardzības elementi šajā gadījumā jāpievieno vismaz 2 motora strāvas transformatoru fāzēm.
Asinhrono dzinēju bojājumu analīze liecina, ka galvenais to atteices iemesls ir izolācijas bojājums pārkaršanas dēļ.
Elektropreces (ierīces) pārslodze- elektropreces (ierīces) jaudas vai strāvas faktiskās vērtības pārsniegums pār nominālvērtību. (GOST 18311-80).
Elektromotora tinumu sildīšanas temperatūra gatela atkarīgs no dzinēja termiskajiem raksturlielumiem un vides parametriem. Daļa no motorā izdalītā siltuma tiek izmantota tinumu sildīšanai, bet pārējais tiek izvadīts vidē. Apkures procesu ietekmē fizikālie parametri kā siltuma jauda un siltuma pārnese.
Atkarībā no motora un apkārtējā gaisa termiskais stāvoklis to ietekmes pakāpe var atšķirties. Ja motora un vides temperatūru starpība ir neliela un izdalītā enerģija ir ievērojama, tad tās galveno daļu absorbē tinums, statora un rotora tērauds, motora korpuss un citas tā daļas. notiek intensīva izolācijas temperatūras paaugstināšanās. Palielinoties apkurei, siltuma pārneses efekts kļūst izteiktāks. Process tiek izveidots pēc tam, kad ir sasniegts līdzsvars starp izdalīto siltumu un siltumu, kas tiek nodots apkārtējai videi.
Strāvas palielināšana, kas pārsniedz pieļaujamo vērtību, nekavējoties nenoved pie ārkārtas stāvoklis. Paiet zināms laiks, līdz stators un rotors sasniedz temperatūras robežu. Tāpēc aizsardzībai nav jāreaģē uz katru pārstrāvu. Mašīnu vajadzētu izslēgt tikai gadījumos, kad pastāv izolācijas ātras nolietošanās risks.
No izolācijas sildīšanas viedokļa liela nozīme ir strāvu plūsmas lielumam un ilgumam, kas pārsniedz nominālvērtību. Šie parametri galvenokārt ir atkarīgi no tehnoloģiskā procesa rakstura.
Tehnoloģiskas izcelsmes elektromotora pārslodzes
 Elektromotora pārslodzes, ko izraisa periodisks griezes momenta pieaugums uz darba mašīnas vārpstas.Šādās mašīnās un iekārtās elektromotora jauda visu laiku mainās. Ir grūti pamanīt kādu ilgu laika periodu, kurā straume paliktu nemainīga. Uz motora vārpstas periodiski rodas īstermiņa lieli pretestības momenti, radot strāvas pārspriegumu.
Elektromotora pārslodzes, ko izraisa periodisks griezes momenta pieaugums uz darba mašīnas vārpstas.Šādās mašīnās un iekārtās elektromotora jauda visu laiku mainās. Ir grūti pamanīt kādu ilgu laika periodu, kurā straume paliktu nemainīga. Uz motora vārpstas periodiski rodas īstermiņa lieli pretestības momenti, radot strāvas pārspriegumu.
Šādas pārslodzes parasti neizraisa motora tinumu pārkaršanu, kuriem ir salīdzinoši liela termiskā inerce. Taču ar pietiekami ilgu ilgumu un atkārtotu atkārtošanos tas tiek izveidots. Aizsardzībai šie režīmi ir "jāatšķir". Tam nevajadzētu reaģēt uz īslaicīgiem slodzes triecieniem.
Citās iekārtās var rasties salīdzinoši nelielas, bet ilgstošas pārslodzes. Motora tinumi pakāpeniski uzsilst līdz temperatūrai, kas ir tuvu maksimālajai pieļaujamajai vērtībai. Parasti elektromotoram ir noteikta siltuma rezerve, un nelielas pārstrāvas, neskatoties uz darbības ilgumu, nevar radīt bīstamu situāciju. Šajā gadījumā izslēgšana nav nepieciešama. Tādējādi arī šeit motora aizsardzībai ir "jāatšķir" bīstama pārslodze no nebīstamas.
Izņemot tehnoloģiskas izcelsmes pārslodzes, var būt avārijas pārslodzes kas rodas citu iemeslu dēļ (avārija barošanas līnijā, darba korpusu iestrēgšana, sprieguma kritums utt.). Viņi izveido savus darbības režīmus. indukcijas motors un izvirzīja savus aizsardzības līdzekļu prasības. Apsveriet asinhronā motora uzvedību tipiskos ārkārtas apstākļos.
Pārslodzes nepārtrauktas darbības laikā ar nemainīgu slodzi
Parasti elektromotorus izvēlas ar noteiktu jaudas rezervi. Turklāt, lielākā daļa laiks, kad mašīnas ir nepietiekami noslogotas. Rezultātā motora strāva bieži ir krietni zem nominālās vērtības. Pārslodzes parasti rodas tehnoloģiju pārkāpumu, bojājumu, iestrēgšanas un iestrēgšanas gadījumā darba mašīnā.
Tādām mašīnām kā ventilatori, centrbēdzes sūkņi, lentes un skrūvju konveijeri ir klusa nemainīga vai nedaudz mainīga slodze. Īslaicīgas materiālu piegādes izmaiņas praktiski neietekmē elektromotora sildīšanu. Tos var ignorēt. Cita lieta, ja normālu darba apstākļu pārkāpumi saglabājas ilgstoši.
Lielākajai daļai elektrisko piedziņu ir noteikta jaudas rezerve. Mehāniskās pārslodzes galvenokārt izraisa mašīnu detaļu bojājumus. Taču, ņemot vērā to rašanās nejaušību, nevar būt drošs, ka noteiktos apstākļos tiks pārslogots arī elektromotors. Piemēram, tas var notikt ar skrūvju konveijera motoriem. Transportējamā materiāla fizikālo un mehānisko īpašību izmaiņas (mitrums, daļiņu izmērs utt.) nekavējoties atspoguļojas tā pārvietošanai nepieciešamajā jaudā. Aizsardzībai ir jāizslēdz motors pārslodzes gadījumā, kas izraisa bīstamu tinumu pārkaršanu.

No ilgtermiņa strāvas pārmērību ietekmes uz izolāciju viedokļa ir jāizšķir divu veidu pārslodzes: salīdzinoši nelielas (līdz 50%) un lielas (vairāk nekā 50%).
Pirmā darbība neparādās uzreiz, bet pakāpeniski, savukārt otrās sekas parādās pēc neilga laika. Ja temperatūras paaugstināšanās virs pieļaujamās vērtības ir neliela, tad izolācijas novecošanās notiek lēni. Nelielas izmaiņas izolācijas materiāla struktūrā uzkrājas pakāpeniski. Temperatūrai paaugstinoties, novecošanās process ievērojami paātrinās.
Padomā par to pārkaršana, kas pārsniedz pieļaujamo ik pēc 8–10 ° C, samazina motora tinumu izolācijas kalpošanas laiku uz pusi. Pa šo ceļu, pārkaršana par 40°C samazina izolācijas kalpošanas laiku 32 reizes! Lai gan tas ir daudz, tas tiek konstatēts pēc daudzu mēnešu darbības.
Pie lielām pārslodzēm (vairāk nekā 50%) izolācija tiek ātri iznīcināta augstas temperatūras ietekmē.
Lai analizētu apkures procesu, mēs izmantojam vienkāršotu dzinēja modeli. Strāvas palielināšanās izraisa mainīgo zudumu pieaugumu. Tinums sāk uzkarst. Izolācijas temperatūra mainās atbilstoši grafikam attēlā. Vienmērīgas temperatūras paaugstināšanās lielums ir atkarīgs no strāvas stipruma.
Kādu laiku pēc pārslodzes tinumu temperatūra sasniedz šai izolācijas klasei atļauto vērtību. Ar lielām pārslodzēm tas būs īsāks, ar nelielām pārslodzēm tas būs garāks. Tādējādi katrai pārslodzes vērtībai būs sava pieļaujamais laiks, ko var uzskatīt par drošu izolācijai.
Tiek saukta pieļaujamā pārslodzes ilguma atkarība no tās lieluma elektromotora pārslodzes raksturlielums. Termofizikālajām īpašībām ir dažas atšķirības, atšķiras arī to raksturlielumi. Cietā līnija attēlā parāda vienu no šiem raksturlielumiem.

No iepriekšminētajām īpašībām mēs varam formulēt viena no galvenajām prasībām. Tam vajadzētu darboties atkarībā no pārslodzes lieluma. E ļauj novērst viltus trauksmes nebīstamu strāvas pārspriegumu laikā, kas rodas, piemēram, iedarbinot dzinēju. Aizsardzībai vajadzētu darboties tikai tad, kad tā nonāk nepieņemamu strāvas vērtību un tās plūsmas ilguma zonā. Tā vēlamajam raksturlielumam, kas parādīts attēlā ar punktētu līniju, vienmēr jāatrodas zem motora pārslodzes raksturlieluma.
Aizsardzības darbību ietekmē vairāki faktori (iestatījumu neprecizitāte, parametru izplatība utt.), kā rezultātā tiek novērotas novirzes no reakcijas laika vidējām vērtībām. Tāpēc punktētā līkne grafikā ir jāuzskata par noteiktu vidējo raksturlielumu. Lai raksturlielumi nekrustotos nejaušu faktoru darbības rezultātā, kas izraisīs nepareizu dzinēja izslēgšanu, ir jānodrošina noteikta rezerve. Faktiski mums ir jārisina nevis atsevišķs raksturlielums, bet gan aizsargjosla, kas ņem vērā aizsardzības reakcijas laika izplatību.
 Precīzā ziņā motora aizsardzības pasākumi ir vēlams, lai abas īpašības būtu pēc iespējas tuvākas viena otrai. Tas ļaus izvairīties no nevajadzīgas paklupšanas, kad pārslodze ir tuvu pieņemamai. Tomēr, ja abu raksturlielumi ir plaši izplatīti, to nevar panākt. Lai nejaušas novirzes no aprēķinātajiem parametriem gadījumā neiekļūtu nepieņemamo pašreizējo vērtību zonā, ir jānodrošina noteikta rezerve.
Precīzā ziņā motora aizsardzības pasākumi ir vēlams, lai abas īpašības būtu pēc iespējas tuvākas viena otrai. Tas ļaus izvairīties no nevajadzīgas paklupšanas, kad pārslodze ir tuvu pieņemamai. Tomēr, ja abu raksturlielumi ir plaši izplatīti, to nevar panākt. Lai nejaušas novirzes no aprēķinātajiem parametriem gadījumā neiekļūtu nepieņemamo pašreizējo vērtību zonā, ir jānodrošina noteikta rezerve.
Aizsardzības raksturlīknei jāatrodas zināmā attālumā no motora pārslodzes raksturlīknes, lai novērstu to savstarpējo krustošanos. Bet tā rezultātā tiek zaudēta motora aizsardzības darbības precizitāte.
Strāvu apgabalā, kas ir tuvu nominālajai vērtībai, parādās nenoteiktības zona. Ieejot šajā zonā, nevar droši pateikt, vai aizsardzība darbosies vai nē.
Šāds trūkums nepastāv . Atšķirībā no strāvas aizsardzības, tā darbojas atkarībā no izolācijas novecošanas cēloņa, tās sildīšanas. Kad tiek sasniegta tinumam bīstama temperatūra, tas izslēdz motoru neatkarīgi no iemesla, kas izraisīja apkuri. Šī ir viena no galvenajām priekšrocībām temperatūras aizsardzība.
Tomēr nevajadzētu pārspīlēt pašreizējās aizsardzības trūkumu. Fakts ir tāds, ka motoriem ir noteikta strāvas rezerve. Nominālā strāva motors vienmēr ir zemāks par strāvu, pie kuras tinumu temperatūra sasniedz pieņemamu vērtību. Tas tiek noteikts, vadoties pēc ekonomiskiem aprēķiniem. Tāpēc pie nominālās slodzes motora tinumu temperatūra ir zem pieļaujamās vērtības. Sakarā ar to tiek izveidota dzinēja siltuma rezerve, kas zināmā mērā kompensē trūkumus.
Daudziem faktoriem, no kuriem atkarīgs izolācijas termiskais stāvoklis, ir nejaušas novirzes. Šajā sakarā raksturlielumu uzlabojumi ne vienmēr dod vēlamo rezultātu.
Pārslodzes mainīgai nepārtrauktai darbībai
 Daži darba korpusi un mehānismi rada slodzi, kas mainās plašā diapazonā, piemēram, drupināšanas, slīpēšanas un citu līdzīgu darbību mašīnās. Šeit periodiskām pārslodzēm tiek pievienota nepietiekama slodze, pie kuras jāstrādā Tukšgaita. Katrs strāvas pieaugums, ņemot vērā atsevišķi, neizraisa bīstamu temperatūras paaugstināšanos. Taču, ja to ir daudz un pietiekami bieži atkārtojas, paaugstinātas temperatūras ietekme uz izolāciju ātri uzkrājas.
Daži darba korpusi un mehānismi rada slodzi, kas mainās plašā diapazonā, piemēram, drupināšanas, slīpēšanas un citu līdzīgu darbību mašīnās. Šeit periodiskām pārslodzēm tiek pievienota nepietiekama slodze, pie kuras jāstrādā Tukšgaita. Katrs strāvas pieaugums, ņemot vērā atsevišķi, neizraisa bīstamu temperatūras paaugstināšanos. Taču, ja to ir daudz un pietiekami bieži atkārtojas, paaugstinātas temperatūras ietekme uz izolāciju ātri uzkrājas.
Motora sildīšanas process pie mainīgas slodzes atšķiras no sildīšanas procesa pie nemainīgas vai vāji izteiktas mainīgas slodzes. Atšķirība izpaužas gan temperatūras izmaiņu gaitā, gan atsevišķu mašīnas daļu sildīšanas raksturā.
Mainoties slodzei, mainās arī tinumu temperatūra. Motora termiskās inerces dēļ temperatūras svārstības ir mazākas. Kad pietiek augsta frekvence slodzes, tinumu temperatūru var uzskatīt par praktiski nemainīgu. Šis darbības režīms būs līdzvērtīgs ilgstošam režīmam ar pastāvīgu slodzi. Zemā frekvencē (herca simtdaļās un zemāk) temperatūras svārstības kļūst pamanāmas. Periodiska tinuma pārkaršana var saīsināt izolācijas kalpošanas laiku.
Ar lielām slodzes svārstībām ar zemu frekvenci elektromotors pastāvīgi atrodas pārejošā procesā. Tā tinuma temperatūra mainās pēc slodzes svārstībām. Tā kā atsevišķām mašīnas daļām ir atšķirīgi termofiziskie parametri, katra no tām uzsilst savā veidā.
Termisko pāreju plūsma mainīgas slodzes apstākļos ir sarežģīta parādība, un to ne vienmēr var aprēķināt. Tāpēc motora tinumu temperatūru nevar spriest pēc strāvas, kas plūst noteiktā laikā. Sakarā ar to, ka elektromotora atsevišķas daļas sakarst atšķirīgi, elektromotora iekšpusē notiek siltuma plūsmas no vienas tā daļas uz citām. Var arī būt, ka pēc elektromotora izslēgšanas no rotora nākošā siltuma dēļ paaugstināsies statora tinumu temperatūra. Tādējādi strāvas stiprums var neatspoguļot izolācijas sildīšanas pakāpi. Jāņem vērā arī tas, ka atsevišķos režīmos rotors uzkarsīs intensīvāk un atdzisīs mazāk intensīvi nekā stators.
Siltuma pārneses procesu sarežģītība to apgrūtina motora apkures kontrole. Pat tiešs tinumu temperatūras mērījums noteiktos apstākļos var radīt kļūdu. Fakts ir tāds, ka nestabilu termisko procesu laikā dažādu iekārtas daļu sildīšanas temperatūra var atšķirties, un mērījumi vienā punktā nevar sniegt patiesu priekšstatu. Tomēr, salīdzinot ar citām metodēm, tinuma temperatūras mērīšana dod precīzāku rezultātu.
To var attiecināt uz visnelabvēlīgāko aizsardzības ziņā. Periodiska iekļaušana darbā liecina par īslaicīgas dzinēja pārslodzes iespējamību. Šajā gadījumā pārslodzes lielums jāierobežo ar tinumu sildīšanas stāvokli, kas nav augstāks par pieļaujamo vērtību.
Aizsardzībai, "uzraugot" tinuma sildīšanas stāvokli, jāsaņem atbilstošs signāls. Tā kā pārejas apstākļos strāva un temperatūra var neatbilst viens otram, aizsardzība, kuras pamatā ir strāvas mērījumi, nevar pareizi pildīt savu lomu.
Iedarbināšanas laiks ir viens no galvenajiem faktoriem, izvēloties motoru. Iedarbināšanas brīdī motors patērē no tīkla palaišanas strāvu, kas 5-7 reizes pārsniedz nominālo strāvu (asinhronajiem motoriem ar vāveres rotoru). Šajā gadījumā palielinās tinumu sildīšana, un, ja palaišanas laiks tiek aizkavēts, tinumu temperatūra var pārsniegt pieļaujamo vērtību.
Tāpēc daudzkārtībai ir liela nozīme paātrinājuma laikā sākuma griezes moments. Tāpēc kompresoru piedziņām ir ieteicams izmantot elektromotorus ar palielinātu palaišanas griezes momentu (AOP).
Vienībām mazo un vidēja jauda palaišanas laiks ar salīdzinoši retiem startiem parasti nepārsniedz 3-5 s, jaudīgām vienībām - 20-30 s.
Griezes moments uz asinhronā motora vārpstas ir proporcionāls sprieguma kvadrātam. Tādējādi pat neliels sprieguma samazinājums iedarbināšanas brīdī krasi samazina palaišanas griezes momentu. Mazas jaudas tīklos var būt gadījumi, kad iekārtu nevar iedarbināt ar pilnu slodzi. Tāpēc, izvēloties dzinēju, tie nosaka minimālā pieļaujamā sprieguma vērtību, pie kuras iekārtu var nodot ekspluatācijā.
Minimālajam pārmērīgajam griezes momentam, kas nodrošina piedziņas paātrinājumu, jābūt vismaz 0,1 nominālais griezes moments elektriskais motors. Tiek pieņemts, ka kompresora statiskais griezes moments palaišanas laikā ir nemainīgs un vienāds ar nominālo (iedarbināšana bez izkraušanas). Ja tīklam ir nepietiekama jauda un sprieguma kritums var izrādīties lielāks par aprēķināto palaišanas laikā, tad palaišana jāveic ar nenoslogotu kompresoru. Ja šāda iedarbināšana nav iespējama, vāveres sprostveida rotora motors ir jānomaina pret uztītu rotora motoru vai jāmaina palaišanas ķēde (izmantojiet ķēdi ar starta strāvas ierobežojumu).
Elektriskās piedziņas vadības ķēdes elektrotehnikā tiek ņemta vērā sprieguma samazināšanas ietekme uz palaišanas un vadības iekārtu (starteri, releji utt.) darbību. Mūsdienu kompresoru izstrādes mērķis ir izmantot iebūvētos elektromotorus to piedziņai mazām, vidējām un lielām mašīnām.
Virzuļu dzesēšanas kompresoru ar iebūvētiem elektromotoriem palaišanas griezes momentu pētījumi ļāva izdarīt noteiktus secinājumus par pēdējo izmantošanu dažu veidu kompresoru darbināšanai. Tādējādi iebūvēto elektromotoru izmantošana ļauj panākt pilnīgu dzesēšanas kompresora noblīvēšanu, atteikties no starpsavienojumu (piedziņas siksnu, savienojumu uc) izmantošanas, kas palielina uzstādīšanas uzticamību un samazina daudzumu. no izmantotā metāla. Turklāt motora tinuma dzesēšana ar aukstumaģenta tvaikiem samazina tā izmērus, palielinot īpašo slodzi.
Iebūvētajiem elektromotoriem ir zemākas izmaksas, salīdzinot ar parastajiem elektromotoriem.
Kompresoru darbība plašā iztvaikošanas un kondensācijas temperatūru diapazonā prasa augstu efektivitāti no iebūvētajiem elektromotoriem. un jaudas koeficients cos Ф, kad slodze mainās ievērojamā diapazonā. Nepieciešama arī laba motora tinumu dzesēšana un uzticama kompresora palaišana visā darba temperatūras diapazonā.
Samazinoties dzinēja palaišanas griezes momentam, iedarbināšanas process pagarinās, izolācija pārkarst, un tās kalpošanas laiks samazinās. Palaišanas griezes momenta pārvērtēšana samazina efektivitāti. un motora cos F un tā pārslodzes jauda.
Tādējādi uzdevums izvēlēties elektromotoru atbilstoši palaišanas griezes momentam ir cieši saistīts ar saldēšanas iekārtas uzticamību un efektivitāti.
Pētījumi liecina, ka, palielinoties kompresora cilindru skaitam, spararata griezes momentam un samazinoties kompresijas pakāpei, sākuma griezes momenta attiecība samazinās.
Eksperimentālie dati dažiem kompresoriem, kas pēc konstrukcijas ir līdzīgi (hermētiski, bez blīvslēga), ļauj noteikt sekojošo:
- nosakot elektromotora palaišanas griezes momentu, jāņem vērā elektromotora un kompresora centrbēdzes masu ietekme, gāzes noplūde no cilindriem pie maziem apgriezieniem un nominālajiem apgriezieniem;
- jo mazāks ir kompresora cilindru skaits un lielāka kompresijas pakāpe, jo lielāka ir elektromotora palaišanas griezes momenta daudzveidība;
- ja kompresora cilindru skaits ir lielāks par četriem un iedarbināšana tiek veikta ar zemu kompresijas pakāpi, var izmantot parastas konstrukcijas elektromotoru, nevis ar palielinātu palaišanas griezes momenta attiecību.
Šos datus var attiecināt uz kompresoriem, kas pēc konstrukcijas ir līdzīgi pārbaudītajiem.