Dzinēji šobrīd ir līdzstrāva atrasts plašs pielietojums dažādās nozarēs. Līdzstrāvas motori tiek izmantoti, ja nepieciešama vienmērīga un precīza ātruma un griezes momenta kontrole plašā diapazonā. Šajā rakstā es runāšu par līdzstrāvas motora vadības bloka izveidi, kas ļautu mainīt motora vārpstas ātrumu un stabilizēt ātrumu noteiktā līmenī neatkarīgi no motora vārpstas slodzes.
Izstrāde ir balstīta uz servo piedziņas darbības principu ar vienas cilpas vadības sistēmu.
Vadības bloks sastāv no šādiem mezgliem:
- SIFU (impulsu sistēma - fāzes kontrole)
- Regulators
- Aizsardzība
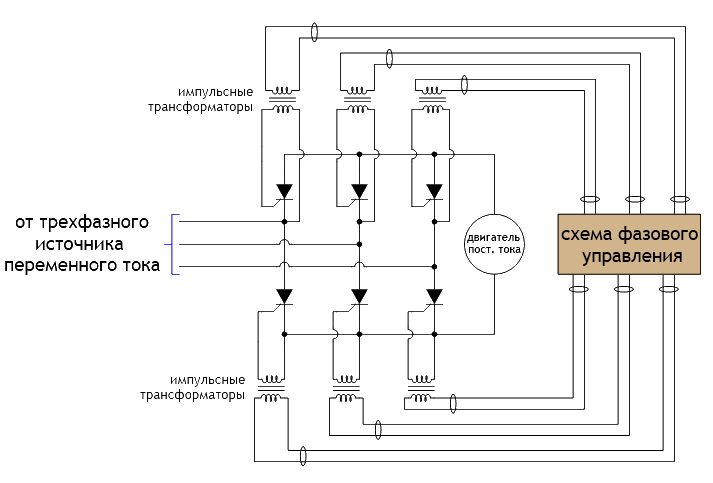
Piedziņas shematiskā diagramma ir parādīta zemāk.
Lielāks
Apskatīsim shēmu sīkāk.
Tātad, SIFU (impulsu - fāzes vadības sistēma) - pārveido tīkla sinusoidālo spriegumu taisnstūrveida impulsu sērijā, kas iet uz jaudas tiristoru vadības elektrodiem. Kad vadības bloks ir ieslēgts Maiņstrāvas spriegums Vērtība 14-16v nonāk tilta taisngriežā D1, kur tā tiek pārveidota par pulsējošu spriegumu, kas kalpo ne tikai ķēdes barošanai, bet arī piedziņas darbības sinhronizēšanai. Diode D2 novērš impulsu izlīdzināšanu ar kondensatoru C1. Tālāk impulsi tiek padoti uz "nulles detektoru" - DA1.1, kas samontēts uz viena LM324 mikroshēmas op-amp, kas darbojas salīdzinājuma režīmā. Kamēr nav impulsa, spriegumi tiešajā un apgrieztajā ieejā ir aptuveni vienādi, un salīdzinājuma ierīce ir līdzsvarotā stāvoklī. Kad fāze iet caur "0", pie salīdzinājuma DA1.1 apgrieztās ieejas, kas spēlē "nulles detektora" lomu, parādās impulsi, kas pārslēdz komparatoru, kā rezultātā tiek ģenerēti taisnstūra pulksteņa impulsi. DA1.1 izvade, kuras atkārtošanās periods ir stingri saistīts ar fāzes konverģenci caur "0".
Zemāk ir oscilogrammas, kas izskaidro darbības principu. 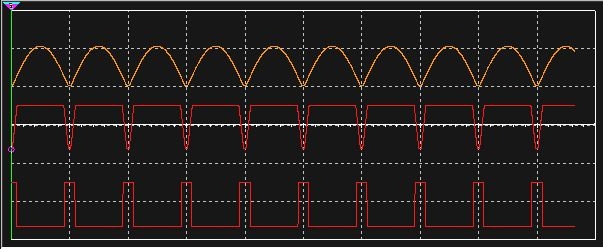
No augšas uz leju: CT1, CT2, CT3.
Ķēde tika simulēta Multisim 11. Šeit ir projekta fails. Varat lejupielādēt, palaist un redzēt, kā šis mezgls darbojas.
Tālāk pulksteņa impulsi tiek ievadīti integratorā ar tranzistora atslēgu (C4, Q1), kur tiek ģenerēts zāģa spriegums. Brīdī, kad fāze iet cauri "0", pulksteņa impulss atver tranzistoru Q1, kas izlādē kondensatoru C4. Pēc impulsa samazināšanās tranzistors aizveras un kondensators tiek uzlādēts līdz nākamajam sinhronizācijas impulsam, kā rezultātā rodas kolektors Q1 (oscilējošs KT4). veidojas lineāri augošs zāģa zoba spriegums, ko stabilizē stabilas strāvas ģenerators, kas izgatavots uz lauka tranzistora T1. "Zāģa" amplitūdu, kas vienāda ar 9V, iestata trimmera rezistors RP1. "Zāģa" spriegums tiek piegādāts uz DA1.2 salīdzinājuma tiešo ieeju.
Atsauces spriegums tiek padots uz komparatora DA1.2 apgriezto ieeju un brīdī, kad zāģa spriegums pārsniedz sprieguma vērtību pie salīdzināšanas ierīces apgrieztās ieejas, salīdzināšanas ierīce pārslēdzas un komparatora izejā veidojas impulss ( oscilators KT4). Impulsu diferencē caur ķēdi R14, C6 un padod uz tranzistora Q2 pamatni. Atveras tranzistors un uz impulsu transformatora Tr1 veidojas jaudas tiristoru atvēršanas impulsi. Palielinot (samazinot) darba spriegumu, mainās impulsu darba cikls KT5.
Šeit ir viļņu formas. 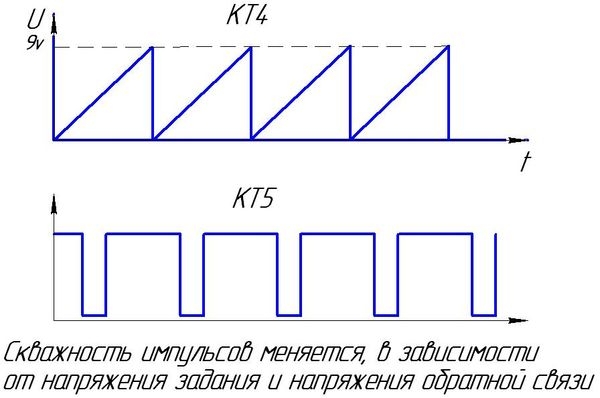
Bet mēs neredzēsim nekādus impulsus KT5, kamēr nenospiedīsim pogu "Start" - S1. Kad poga netiek nospiesta, barošanas spriegums + 12 V caur parasti aizvērtiem kontaktiem S1 gar ķēdi R12, D3 tiek padots uz apgriezto ieeju DA1.2 un ir vienāds ar aptuveni 11 V. Tā kā šis spriegums pārsniedz “zāģa” spriegumu, kas vienāds ar 9 V, salīdzinājums tiek bloķēts, un tiristoru atvēršanas vadības impulsi netiek veidoti. Lai novērstu negadījumu un dzinēja atteici, ja operators nav iestatījis ātruma regulatoru uz “0”, ķēdē ir paredzēts paātrinājuma bloks C5, R13, ko izmanto vienmērīgai dzinēja paātrināšanai. Režīmā "Start" ķēde darbojas šādi: nospiežot pogu "Start", parasti aizvērtie kontakti atveras un kondensators C5 gar ķēdi - "zeme", R13, - C5 sāk vienmērīgi uzlādēt un spriegums. uz kondensatora negatīvās plāksnes pakāpeniski tiecas uz nulli. Tajā pašā laikā spriegums pie invertējošās ieejas DA1.2 pakāpeniski palielinās līdz vērtībai, ko nosaka atsauces spriegums, un komparators sāk ģenerēt jaudas tiristoru vadības impulsus. Uzlādes laiku nosaka C5, R13 vērtības. Ja dzinēja darbības laikā ir jāmaina tā apgriezienu skaits, lai izvairītos no pēkšņām ātruma pārsprieguma, ķēde nodrošina “paātrinājuma-palēninājuma” bloku R21, C8, R22. Palielinoties (samazinoties) atsauces spriegumam, kondensators C8 tiek vienmērīgi uzlādēts (izlādējies), kas novērš strauju sprieguma “pieplūdumu” pastiprinātāja apgrieztajā ieejā un tādējādi novērš strauju motora apgriezienu skaita pieaugumu.
Tagad apskatīsim, kā tas darbojas ātruma regulators.
Regulators ir paredzēts, lai uzturētu nemainīgu dzinēja apgriezienu skaitu kontroles zonā. Regulators ir diferenciālais pastiprinātājs ar divu spriegumu summēšanu: atsauces spriegumu un atgriezeniskās saites spriegumu. Atsauces spriegumu iestata rezistors RP1 un padod caur filtru R20, C8, R21, kas vienlaikus veic "paātrinājuma - palēninājuma" vienības funkcijas, tiek padots uz DA1.3 op-amp regulatora apgriezto ieeju. Palielinoties atsauces spriegumam pie op-amp DA1.3 izejas, izejas spriegums samazinās lineāri.
Regulatora izejas spriegums tiek padots uz SIFU DA1.2 komparatora apgriezto ieeju, kur, summējot ar zāģa zoba sprieguma impulsiem, tas tiek pārveidots par taisnstūra impulsu sēriju, kas nonāk tiristoru vadības elektrodos. Palielinoties (samazinoties) atsauces spriegumam, palielinās (samazinās) arī izejas spriegums pie barošanas bloka izejas.
Šis grafiks parāda saistību starp motora apgriezienu skaitu un atsauces spriegumu. 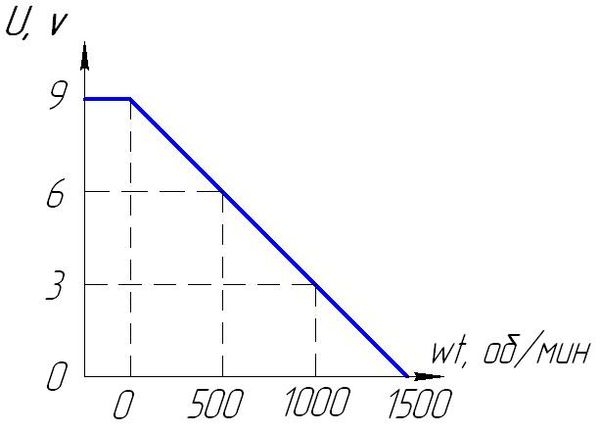
Dzinēja apgriezienu skaita vērtības ir norādītas kā piemērs.
Sprieguma dalītājs R22, R23, kas savienots ar DA1.3 regulatora tiešo ieeju, kalpo, lai novērstu dzinēja avāriju, kad atgriezeniskā saite pārtrūkst (pārtraucot atgriezenisko saiti, dzinējs pāriet uz pārdošanu).
Kad piedziņa ir ieslēgta, tahoģenerators sāk ģenerēt spriegumu, kas ir proporcionāls dzinēja apgriezieniem. Šis spriegums tiek piegādāts precīzijas detektora DA1.4, DA2.1 ieejā, kas samontēts saskaņā ar pilna viļņa ķēdi. Spriegums, kas ņemts no precīzā detektora DA1.4, DA2.1 izejas, tiek padots caur filtru C10, R30, R33 uz atgriezeniskās saites mērogošanas pastiprinātāju DA2.2. Pastiprinātājs kalpo, lai pielāgotu atgriezeniskās saites spriegumu, kas nāk no tahoģeneratora. Spriegums no operētājsistēmas pastiprinātāja DA2.2 izejas. iet gan uz regulatora ieeju DA1.3, gan uz aizsardzības ķēdi DA2.3.
Rezistors RP1 nosaka dzinēja apgriezienu skaitu. Kad dzinējs darbojas bez slodzes, spriegums pie mērogošanas pastiprinātāja izejas ir zemāks par spriegumu pie op-amp DA1.3 6. kontakta. ≈ +5v, tāpēc piedziņa darbojas kā regulators. Palielinoties slodzei uz motora vārpstu, no tahoģeneratora saņemtais spriegums samazinās, un rezultātā samazinās mērogošanas pastiprinātāja izejas spriegums.
Kad šis spriegums ir mazāks par spriegumu DU DA1.3 5. tapā, piedziņa nonāk strāvas stabilizācijas zonā. Sprieguma samazināšana pie op-amp DA1.3 neinvertējošās ieejas noved pie tā izejas sprieguma samazināšanās, un, tā kā tas darbojas ar invertējamo pastiprinātāju DA1.2, tas noved pie lielāka tiristoru atvēršanas leņķa. un līdz ar to uz motora armatūras sprieguma palielināšanos.
AIZSARDZĪBAS SHĒMA
Aizsardzība pret ātruma pārsniegšanu ir paredzēta, lai aizsargātu dzinēju no negadījuma, ja strauji palielinās iestatītais dzinēja apgriezienu skaits. Ķēde ir samontēta uz op-amp DA2.3, savienota saskaņā ar salīdzinājuma ķēdi. Atsauces spriegums tiek piegādāts uz salīdzinājuma apgriezto ieeju no dalītāja R36, R37, RP3. Rezistors RP3 nosaka aizsardzības slieksni. Spriegums no mērogošanas pastiprinātāja DA2.2 izejas tiek piegādāts uz aizsardzības komparatora DA2.3 tiešo ieeju. Kad dzinēja apgriezienu skaits pārsniedz nominālo, spriegums pie salīdzinājuma tiešās ieejas pārsniedz aizsardzības iestatījuma slieksni, ko nosaka RP3 - komparators pārslēdzas. Pozitīvas atgriezeniskās saites klātbūtnes dēļ ķēdē R38 izraisa salīdzinājuma “noklikšķināšanu”, un VD12 diodes klātbūtne neļauj salīdzinājumam atiestatīt. Kad aizsardzība tiek iedarbināta, spriegums no aizsardzības komparatora izejas (≈ +11v) caur VD14 diodi tiek piegādāts uz SIFU apgriezto ieeju 13 DA1.2, un tā kā aizsardzības spriegums pārsniedz “zāģa” spriegumu ( = 9v), ir tūlītējs aizliegums izdot vadības impulsus vadības tiristoru elektrodiem. Spriegums no aizsardzības komparatora DA2.3 izejas atver tranzistoru VT4, kas noved pie releja P1.1 darbības un VL1 gaismas diodes aizdedzes, kas signalizē par avārijas situāciju. Aizsardzību var noņemt, tikai pilnībā atslēdzot piedziņu un pēc 5–10 sekunžu pauzes to vēlreiz ieslēdzot.
Vadības bloka jaudas daļa.
Strāvas sadaļas diagramma ir parādīta zemāk. 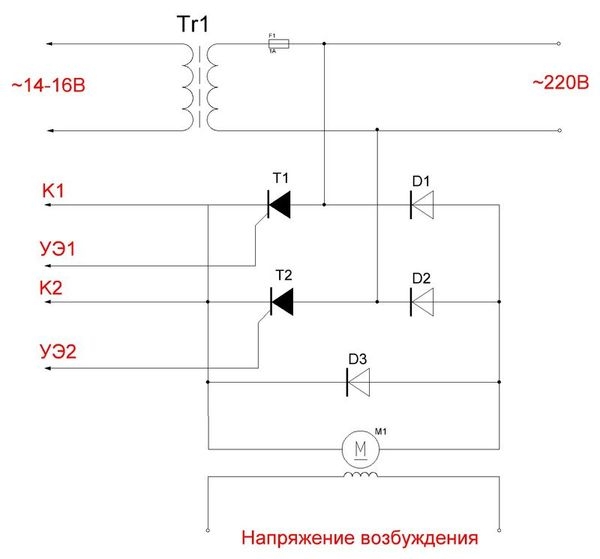
Transformators Tr1 ir paredzēts vadības bloka ķēdes barošanai. Vadāmais taisngriezis ir samontēts saskaņā ar pustilta simetrisku ķēdi un satur divas jaudas diodes D1, D2
un divi jaudas tiristori T1, T2 un aizsargdiode D3. Ierosināšanas tinumu darbina pats atsevišķs transformators un taisngriezis.
Ja motoram nav tahoģeneratora, atgriezenisko saiti, lai kontrolētu ātrumu, var veikt šādi:
1. Izmantojiet strāvas transformatoru, kas iekļauts vadāmā taisngrieža barošanas ķēdē 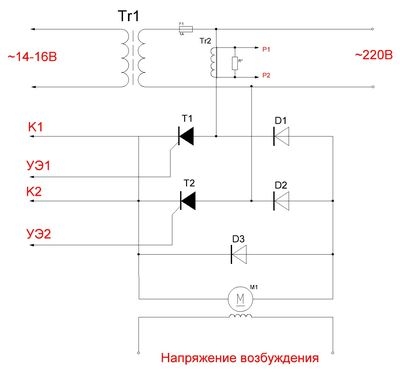
Ja tiek izmantots strāvas transformators, vadības bloka ķēdē uzlieciet džemperi P1
uz pozīciju 1-3, tas nepieciešams, jo, palielinoties slodzei, palielināsies armatūras strāva, līdz ar to palielināsies arī strāvas transformatora noņemtais spriegums, tāpēc atgriezeniskās saites spriegums jāpieliek invertējam
izvades mikroshēma DA1.3. Varat arī ievietot standarta strāvas šuntu, bet tikai motora armatūras ķēdē pēc taisngrieža un noņemt no tā atgriezeniskās saites signālu.
2. Izmantojiet armatūras sprieguma sensoru. Diagramma ir parādīta zemāk. 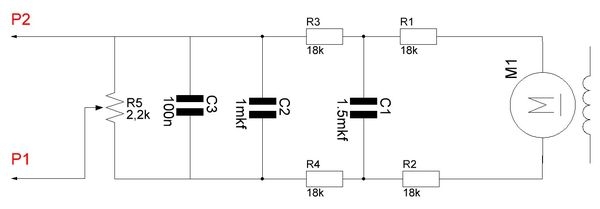
Armatūras sprieguma sensors ir filtrs-dalītājs un ir tieši savienots ar motora armatūras spailēm. Disks ir konfigurēts šādi. Rezistori “Reference” un “Scaling Uoc” ir iestatīti vidējā pozīcijā. Armatūras sprieguma sensora rezistors R5 tiek nogādāts apakšējā pozīcijā līdz “zemei”. Mēs ieslēdzam piedziņu un iestatām spriegumu pie dzinēja armatūras līdz aptuveni 110 voltiem. Kontrolējot spriegumu pie motora armatūras, mēs sākam griezt rezistoru R5. Noteiktā regulēšanas brīdī armatūras spriegums sāks samazināties, tas norāda, ka atgriezeniskā saite ir sākusi darboties.
Tagad pāriesim pie vadības bloka dizaina un regulēšanas.
Vadības bloks tika izgatavots uz iespiedshēmas plates (PCB fails) 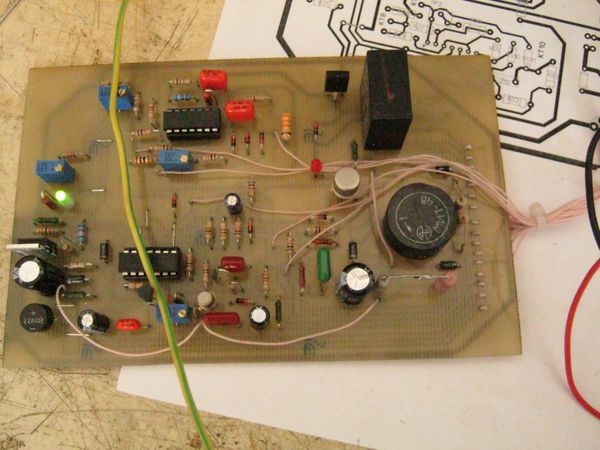
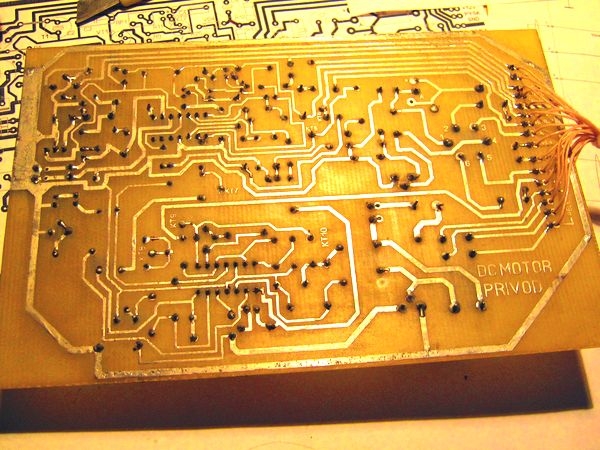
Plāksne ir savienota ar MGTF vadu ar savienotāju, lai to būtu viegli demontēt remonta laikā.
Iestatījums
Noregulēšanas laikā jaudas daļa tika samontēta ar virsmas montāžu, kā slodze tika izmantota parastā kvēlspuldze. 
Mēs sākam regulēšanu, pārbaudot barošanas spriegumus un barošanas spriegumu uz darbības pastiprinātājiem DA1, DA2. Mikroshēmas vēlams ievietot rozetēs. Pēc tam mēs kontrolējam oscilogrammas kontroles punktos CT1, CT2, CT3 (oscilogrammas šajos punktos ir norādītas SIFU apraksta sākumā). Tagad mēs novietojam osciloskopu vadības punktā KT4. Jābūt zāģa zoba impulsiem, kā parādīts iepriekš redzamajā oscilogrammā (pogai “Start” šajā brīdī jābūt atvērtai). Ar trimmera rezistoru RP1 ir jāiestata “zāģa” šūpoles uz 9 voltiem, tas ir ļoti svarīgs punkts, jo no tā ir atkarīga ķēdes turpmākā darbība. Tā kā lauka efekta tranzistoru parametru izkliede var būt ļoti ievērojama, iespējams, ka ar RP1 regulēšanas diapazonu var nepietikt, tad izvēloties rezistora R10 vērtību, lai sasniegtu vēlamo diapazonu. Kontrolpunktā KT3 impulsa ilgumam jābūt 1,5 - 1,8 ms, ja nē, tad izvēloties rezistoru R4 (samazināšanās virzienā), lai sasniegtu nepieciešamo ilgumu.
Pagriežot RR1 regulatoru vadības punktā KT5, kontrolējiet impulsu darba cikla izmaiņas no maksimālā līdz to pilnīgai izzušanai RR1 slīdņa apakšējā pozīcijā. Šajā gadījumā vajadzētu mainīties ar barošanas bloku pievienotās spuldzes spilgtumu.
Tālāk mēs savienojam vadības bloku ar dzinēju un tahoģeneratoru. Mēs iestatām regulatoru RR1
armatūras spriegums ir aptuveni 40-50 volti. Rezistors RP3 jāiestata vidējā pozīcijā. Kontrolējot spriegumu pie motora armatūras, mēs sākam griezt rezistoru RP3. Noteiktā regulēšanas brīdī armatūras spriegums sāks samazināties, tas norāda, ka atgriezeniskā saite ir sākusi darboties. Tiem, kas vēlas eksperimentēt: lai palielinātu piedziņas stingrību, varat arī palielināt pretestību R24, tādējādi palielinot regulatora pastiprinājumu, vai palielināt rezistoru R32.
Ja tiek izmantota motora armatūras strāvas atgriezeniskā saite.
Šim nolūkam, kā minēts iepriekš, strāvas ķēdē ir iekļauts strāvas transformators.
vadāms taisngriezis. Strāvas transformatora kalibrēšanas ķēde ir norādīta zemāk. Izvēloties rezistoru, transformatora izejā iegūstiet maiņspriegumu ≈ 2 ÷ 2,5 V. Slodzes jaudai RN1 jāatbilst motora jaudai. 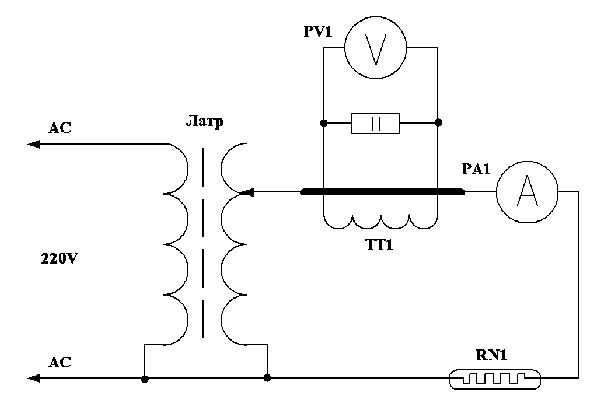
Uzmanību! Neieslēdziet strāvas transformatoru bez slodzes rezistora.
Mēs savienojam strāvas transformatoru ar atgriezeniskās saites ķēdi P1 un P2. "Regulatora" iestatīšanas laikā ir vēlams atlodēt diodi D12, lai izslēgtu nepareizu aizsardzības darbību.
Oscilogrammām kontroles punktos KT8, KT9, KT10 jābūt tādām, kā attēlā zemāk. 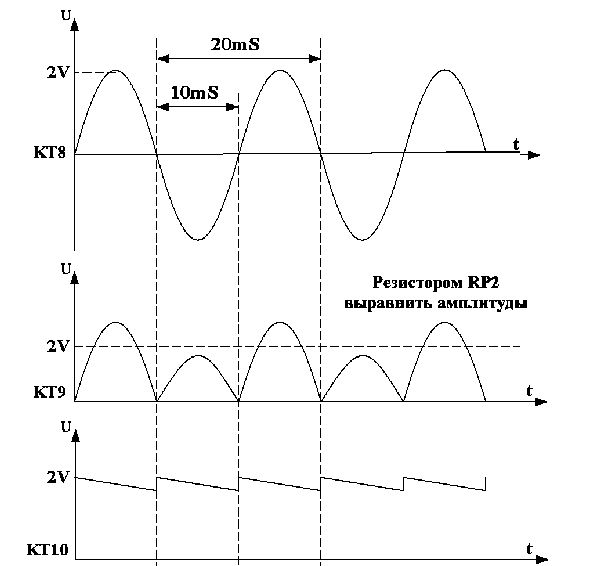
Papildu iestatījumi ir tādi paši kā tahoģeneratora izmantošanas gadījumā.
Ja tiek izmantota motora armatūras sprieguma atgriezeniskā saite.
Kā minēts iepriekš, var izmantot armatūras sprieguma atgriezenisko saiti, šim nolūkam tiek samontēts armatūras sprieguma sensors. Vadības bloks ir konfigurēts šādi. Rezistori “Reference” un “Scaling Uoc” ir iestatīti vidējā pozīcijā. Armatūras sprieguma sensora rezistors R5 tiek nogādāts apakšējā pozīcijā līdz “zemei”. Mēs ieslēdzam piedziņu un iestatām spriegumu pie dzinēja armatūras līdz aptuveni 110 voltiem. Kontrolējot spriegumu pie motora armatūras, mēs sākam griezt rezistoru R5. Noteiktā regulēšanas brīdī armatūras spriegums sāks samazināties, tas norāda, ka atgriezeniskā saite ir sākusi darboties.
Šis vadības bloks tika izveidots urbšanas iekārtai. Šeit ir šī monstra fotogrāfija 
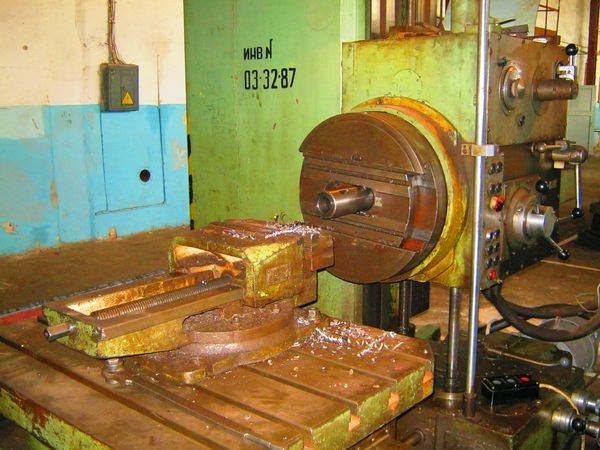
Šajā mašīnā sabojājās elektriskās mašīnas pastiprinātājs, kas kontrolēja līdzstrāvas motoru galda pārvietošanai.
Šeit ir jaudas pastiprinātājs. 
Tā vietā tika izgatavots šis vadības bloks.
Šeit ir paša līdzstrāvas motora fotoattēls. 
Vadības bloks tika montēts uz izolējošas pamatnes, kur novietoti visi galvenie elementi. 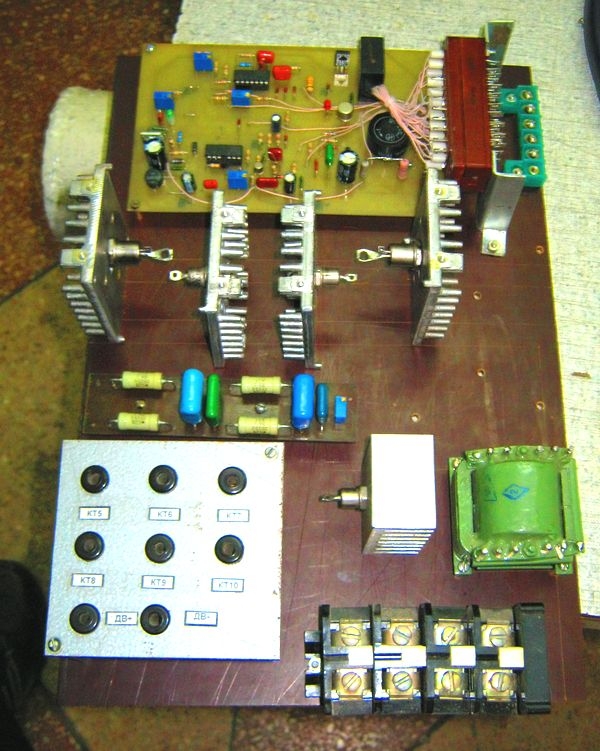
Strāvas diodes un tiristori ir uzstādīti uz siltuma izlietnēm. Tika izgatavots arī panelis ar savienotājiem, kur tika izvadīti signāli no ķēdes vadības punktiem. Tas tika darīts, lai atvieglotu uzstādīšanu un remontu tieši uz mašīnas.
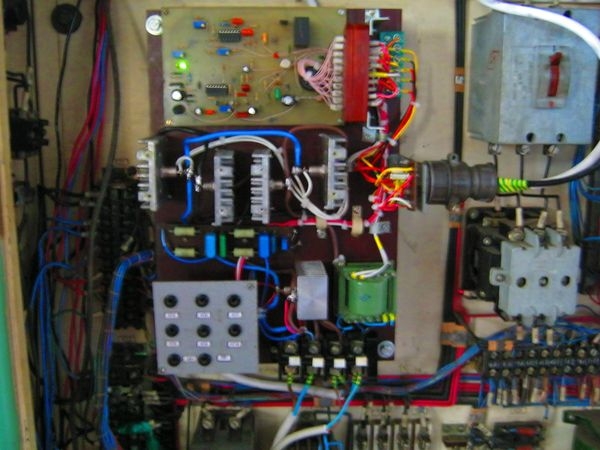
Šeit ir uzstādīts vadības bloks mašīnas strāvas skapī 
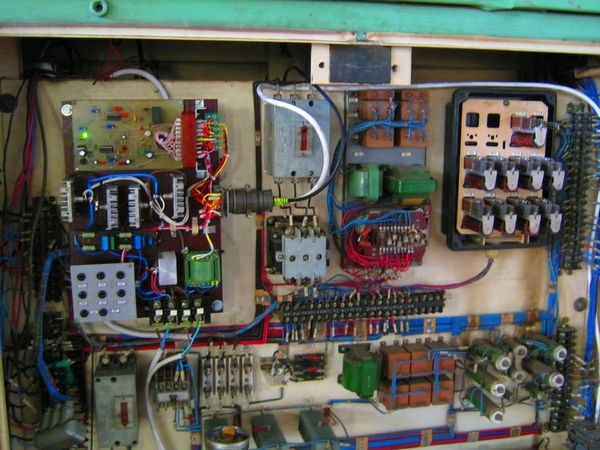
Strāvas skapja otrā pusē tika uzstādīts neliels vadības panelis. 
Uz tā atrodas:
- pārslēgšanas slēdzis ierīces ieslēgšanai
- darbības režīma pārslēgšanas slēdzis. Tā kā mašīnas galda regulēšanas kustībām nav nepieciešama precīza apgriezienu kontrole un stabilizācija, uz šo laiku atgriezeniskās saites ķēde tiek manevrēta.
- pogas apgriezienu skaita regulēšanai. Tika piegādāti divi mainīgi rezistori, viens rupjai regulēšanai, otrs - vairāku apgriezienu - precīzai nepieciešamo apgriezienu iestatīšanai detaļu raupjai un smalkajai urbšanai.
Tiem, kurus interesē, zemāk ir video par mašīnas darbību. Pirmkārt, tiek parādīts urbuma urbums 20 mm biezā tērauda plāksnē. Tad tiek parādīts, ar kādu frekvenci griežas mašīnas galda padeves skrūve. Ar šo ātrumu detaļa tiek padota uz griezēju, un šo padeves skrūves ātrumu nodrošina līdzstrāvas motors, kuram faktiski tas viss tika darīts.
Vadības bloks darbojās labi, nekādu kļūmju un avāriju nebija.
Volodimirs Rentjuks, Zaporožje, Ukraina
Raksts sniedz īss apskats un populāru ķēžu analīze, kas paredzētas līdzstrāvas kolektoru motoru vadīšanai, kā arī oriģinālie un mazpazīstami ķēžu risinājumi
Elektromotori, iespējams, ir viens no populārākajiem elektrotehnikas izstrādājumiem. Kā mums stāsta viszinošā Vikipēdija, Elektrodzinējs - elektriskā mašīna(elektromehāniskais pārveidotājs), kurā Elektroenerģija pārveidots par mehānisku. Par tās vēstures sākumu var uzskatīt atklājumu, ko Maikls Faradejs izdarīja tālajā 1821. gadā, nosakot diriģenta iespējamību griezties magnētiskajā laukā. Taču pirmais vairāk vai mazāk praktiskais elektromotors ar rotējošu rotoru gaidīja savu izgudrojumu līdz 1834. gadam. To izgudroja Morics Hermanis fon Jakobī, mums vairāk pazīstams kā Boriss Semenovičs, strādājot Kēnigsbergā. Elektromotorus raksturo divi galvenie parametri - vārpstas (rotora) griešanās ātrums un uz vārpstas attīstītais griezes moments. Kopumā abi šie parametri ir atkarīgi no motoram piegādātā sprieguma un strāvas tā tinumos. Pašlaik ir diezgan daudz dažādu elektromotoru šķirņu, un, kā atzīmēja mūsu slavenais literārais varonis Kozma Prutkovs, bezgalīgo nevar aptvert, mēs pakavēsimies pie līdzstrāvas motoru (turpmāk tekstā - kā) vadības pazīmju apsvēršanas. elektromotori).
Pastāv divu veidu līdzstrāvas motori - tie ir mums pazīstami kolektoru motori un bezsuku (pakāpju) motori. Pirmajā mainīgu magnētisko lauku, kas nodrošina motora vārpstas griešanos, veido rotora tinumi, kas tiek darbināti caur birstes komutatoru - kolektoru. Tas mijiedarbojas ar statora pastāvīgo magnētisko lauku, griežot rotoru. Šādu dzinēju darbībai ārējie slēdži nav nepieciešami, to lomu spēlē kolektors. Statoru var izgatavot gan no pastāvīgo magnētu sistēmas, gan no elektromagnētiem. Otrā tipa elektromotorā tinumi veido motora fiksēto daļu (statoru), un rotors ir izgatavots no pastāvīgajiem magnētiem. Šeit, pārslēdzot statora tinumus, tiek ģenerēts mainīgs magnētiskais lauks, ko veic ārējā vadības ķēde. Stepper motors ("stepper motor" angļu valodā) ir daudz dārgāki nekā kolektoru motori. Tās ir diezgan sarežģītas ierīces ar savām specifiskām funkcijām. To pilnīgam aprakstam ir nepieciešama atsevišķa publikācija, un tas ir ārpus šī raksta darbības jomas. Lai iegūtu papildinformāciju par šāda veida dzinējiem un to vadības shēmām, varat atsaukties, piemēram, uz.
Kolektoru motori (1. attēls) ir lētāki, un tiem parasti nav nepieciešamas sarežģītas vadības sistēmas. To darbībai pietiek ar barošanas sprieguma padevi (rektificēts, pastāvīgs!). Problēmas sāk rasties, kad rodas nepieciešamība pielāgot šāda dzinēja vārpstas griešanās ātrumu vai īpašā griezes momenta kontroles režīmā. Šādiem dzinējiem ir trīs galvenie trūkumi - tas ir mazs griezes moments pie zemiem griešanās ātrumiem (tāpēc bieži ir nepieciešama pārnesumkārba, un tas atspoguļojas visas konstrukcijas izmaksās), paaudze augsts līmenis elektromagnētiskie un radiotraucējumi (sakarā ar slīdošo kontaktu kolektorā) un zema uzticamība (precīzāk, mazs resurss; iemesls ir tajā pašā kolektorā). Lietojot kolektoru motorus, jāņem vērā, ka to rotora strāvas patēriņš un griešanās ātrums ir atkarīgs no vārpstas slodzes. Matu motori ir daudzpusīgāki un plašāk izmantoti, jo īpaši zemu izmaksu lietojumos, kur cena ir noteicošais faktors.
Tā kā kolektora motora rotora griešanās ātrums, pirmkārt, ir atkarīgs no motoram piegādātā sprieguma, tā vadībai ir dabiski izmantot shēmas, kurām ir iespēja iestatīt vai regulēt izejas spriegumu. Šādi risinājumi, kurus var atrast internetā, ir shēmas, kuru pamatā ir regulējami stabilizatori spriegums un, tā kā diskrēto stabilizatoru laikmets jau sen ir pagājis, ieteicams, piemēram, izmantot lētus integrālos kompensācijas stabilizatorus. Iespējamie variantišāda shēma ir parādīta 2. attēlā.
Shēma ir primitīva, taču šķiet ļoti veiksmīga un, pats galvenais, lēta. Paskatīsimies uz to no inženiera viedokļa. Pirmkārt, vai ir iespējams ierobežot motora griezes momentu vai strāvu? Tas tiek atrisināts, uzstādot papildu rezistoru. 2. attēlā tas ir apzīmēts ar R LIM . Tās aprēķins ir pieejams specifikācijā, taču tas pasliktina ķēdes kā sprieguma regulatora veiktspēju (vairāk par to tālāk). Otrkārt, kura no ātruma kontroles iespējām ir labāka? 2.a attēlā redzamā opcija nodrošina ērtu lineāro vadības raksturlielumu, tāpēc tā ir populārāka. 2.b attēlā redzamajai opcijai ir nelineāra reakcija. Bet pirmajā gadījumā, ja kontakts mainīgajā rezistorā ir bojāts, mēs iegūstam maksimālais ātrums, bet otrajā - minimums. Kuru izvēlēties, ir atkarīgs no konkrētā pielietojuma. Tagad apsveriet vienu piemēru motoram ar tipiskiem parametriem: darba spriegums 12 V; maksimālā darba strāva 1 A. LM317 IC atkarībā no sufiksiem ir maksimālā izejas strāva no 0,5 A līdz 1,5 A (skat. specifikāciju; ir līdzīgi IC ar lielāku strāvu) un uzlabota aizsardzība (pret pārslodzi un pārkaršanu). No šī viedokļa tas lieliski atbilst mūsu uzdevumam. Problēmas, kā vienmēr, slēpjas detaļās. Ja dzinējam tiek sasniegta maksimālā jauda, kas ir ļoti reāli mūsu pielietojumam, tad uz IC, pat ar minimālo pieļaujamo starpību starp ieejas spriegumu V IN un izeju V OUT, kas vienāda ar 3 V, jauda tiks izkliedēta vismaz
P = (V IN - V OUT) × I = 3 × 1 = 3 vati.
Tāpēc ir nepieciešams radiators. Atkal jautājums – uz kādu spēku izkliedi? Pie 3 vatiem? Un šeit tā nav. Ja neesat pārāk slinks un aprēķiniet IC slodzes grafiku atkarībā no izejas sprieguma (to ir viegli izdarīt programmā Excel), tad mēs iegūstam, ka mūsu apstākļos IC maksimālā jauda tiks izkliedēta nevis pie maksimālā izejas sprieguma. no regulatora, bet pie izejas sprieguma 7,5 V (skat. 3. attēlu), un tas būs gandrīz 5,0 W!
Kā redzat, izrādās, ka kaut kas vairs nav lēts, bet ļoti apgrūtinošs. Tātad šī pieeja ir piemērota tikai mazjaudas motoriem ar darba strāvu ne vairāk kā 0,25 A. Šajā gadījumā regulējošās IC jauda būs 1,2 W līmenī, kas jau būs pieņemams.
Izeja ir kontrolei izmantot impulsa platuma modulācijas (PWM) metodi. Tas patiešām ir visizplatītākais. Tās būtība ir vienpolāru taisnstūrveida impulsu padeve dzinējam, kuru ilgums ir modulēts. Saskaņā ar signālu teoriju šādas secības struktūrā ir nemainīga komponente, kas ir proporcionāla attiecībai τ/T, kur: τ ir impulsa ilgums, un T ir secības periods. Tā ir viņa, kas kontrolē dzinēja ātrumu, kas viņu atšķir kā integratoru šajā sistēmā. Tā kā uz PWM balstīta regulatora izejas stadija darbojas pārslēgšanas režīmā, parasti tam nav nepieciešami lieli radiatori, lai izkliedētu siltumu, pat relatīvi. lielas jaudas dzinējs, un šāda regulatora efektivitāte ir nesalīdzināmi augstāka nekā iepriekšējam. Dažos gadījumos varat izmantot buck vai boost DC / DC pārveidotājus, taču tiem ir vairāki ierobežojumi, piemēram, attiecībā uz izejas sprieguma regulēšanas dziļumu un minimālo slodzi. Tāpēc parasti citi risinājumi ir biežāki. Šāda regulatora "klasiskā" shēmas konstrukcija ir parādīta 4. attēlā. To izmanto kā droseļvārstu (regulatoru) profesionālajā dzelzceļa modelī.
Pirmajā darbības pastiprinātājā ir samontēts oscilators, otrajā - salīdzinājums. Signāls no kondensatora C1 tiek padots uz komparatora ieeju, un, pielāgojot reakcijas slieksni, veidojas taisnstūrveida signāls ar vēlamo attiecību τ/T (5. attēls).
Regulēšanas diapazonu nosaka apgriešanas rezistori RV1 (ātrāk) un RV3 (lēnāk), un pašu ātruma kontroli veic rezistors RV2 (ātrums). Es vēršu lasītāju uzmanību uz to, ka līdzīga shēma internetā cirkulē krievu valodas forumos ar kļūdām dalītāja vērtējumos, kas nosaka salīdzinājuma slieksni. Dzinēju tieši kontrolē, izmantojot atslēgu uz jaudīga tipa lauka efekta tranzistora. Šī MOSFET tipa tranzistora īpašības ir liela darba strāva (30 A līdzstrāva un līdz 120 A impulss), īpaši zema atvērtā kanāla pretestība (40 mΩ) un līdz ar to minimāli jaudas zudumi atvērtā stāvoklī.
Kam vispirms jāpievērš uzmanība, izmantojot šādas shēmas? Pirmkārt, tā ir vadības ķēdes izpilde. Šeit shēmā (4. attēls) ir neliels trūkums. Ja laika gaitā radīsies problēmas ar mainīgā rezistora kustīgo kontaktu, mēs iegūsim pilnīgu gandrīz momentānu motora paātrinājumu. Tas var sabojāt mūsu ierīci. Kas ir pretlīdzeklis? Uzstādiet papildu pietiekami augstas pretestības rezistoru, piemēram, 300 kΩ no IC izejas 5 uz kopējo vadu. Šajā gadījumā, ja regulators neizdodas, dzinējs tiks apturēts.
Vēl viena problēma ar šādiem regulatoriem ir izejas stadija vai motora draiveris. Šādās shēmās to var veikt gan uz lauka efekta tranzistoriem, gan uz bipolāriem; pēdējie ir nesalīdzināmi lētāki. Bet gan pirmajā, gan otrajā variantā ir jāņem vērā daži svarīgi punkti. Lai vadītu MOSFET tipa lauka efekta tranzistoru, ir jānodrošina tā ieejas kapacitātes uzlāde un izlāde, un tas var būt tūkstošiem pikofaradu. Ja netiek izmantots rezistors virknē ar vārtiem (R6 4. attēlā) vai tā vērtība ir pārāk maza, tad relatīvi augstās frekvences vadība, darbības pastiprinātājs var neizdoties. Ja izmantojat liela nomināla R6, tad tranzistors ilgāk paliks sava pārvades raksturlieluma aktīvajā zonā, un tāpēc mums palielinās atslēgas zudumi un sildīšana.
Vēl viena piezīme par shēmu 4. attēlā. Papildu diodes D2 izmantošanai nav jēgas, jo tranzistora BUZ11 struktūrā jau ir sava iekšējā aizsargājošā ātrgaitas diode ar labākiem parametriem nekā piedāvātā. Arī diode D1 ir nepārprotami lieka, tranzistors BUZ11 ļauj nodrošināt vārtu avota spriegumu ± 20 V, un polaritātes maiņa vadības ķēdē ar vienpolu barošanu, kā arī spriegumiem virs 12 V nav iespējama.
Ja tiek izmantots bipolārs tranzistors, rodas problēma ar pietiekamas bāzes strāvas ģenerēšanu. Kā zināms, lai piesātinātu bipolārā tranzistora slēdzi, tā bāzes strāvai jābūt vismaz 0,06 no slodzes strāvas. Ir skaidrs, ka darbības pastiprinātājs var nenodrošināt šādu strāvu. Šim nolūkam līdzīgā, faktiski, regulatorā, kas tiek izmantots, piemēram, uzņēmuma populārajā mini gravētājā PT-5201, tiek izmantots tranzistors, kas ir Darlington ķēde. Šeit ir interesants punkts. Šie mini gravieri dažreiz neizdodas, bet ne tranzistora pārkaršanas dēļ, kā varētu pieņemt, bet gan IC pārkaršanas dēļ (maksimālā darba temperatūra +70 ° C) ar izejas tranzistoru (maksimālā pieļaujamā temperatūra +150 ° C) . Raksta autora izmantotajos produktos viņš tika piespiests cieši pie IC korpusa un uzklāts uz līmes, kas nepieļaujami uzsildīja IC un gandrīz nobloķēja siltuma izlietni. Ja saskaraties ar šādu veiktspēju, labāk ir “atlīmēt” tranzistoru no IC un pēc iespējas vairāk saliekt. Par šo zinātību raksta autors saņēma Pro'sKit rīku komplektu. Kā redzat, viss ir jāatrisina kopumā - apskatiet ne tikai shēmu, bet arī pievērsiet uzmanību regulatora konstrukcijai kopumā.
Vienkāršākiem PWM kontrolieriem ir vēl dažas interesantas shēmas. Piemēram, divas shēmas, kuru pamatā ir viens draivera darbības pastiprinātājs, ir publicētas [
Ja nepieciešama vienmērīga un precīza elektromotora ātruma un griezes momenta vadība plašā diapazonā, ir nepieciešama līdzstrāvas motora vadības ķēde.
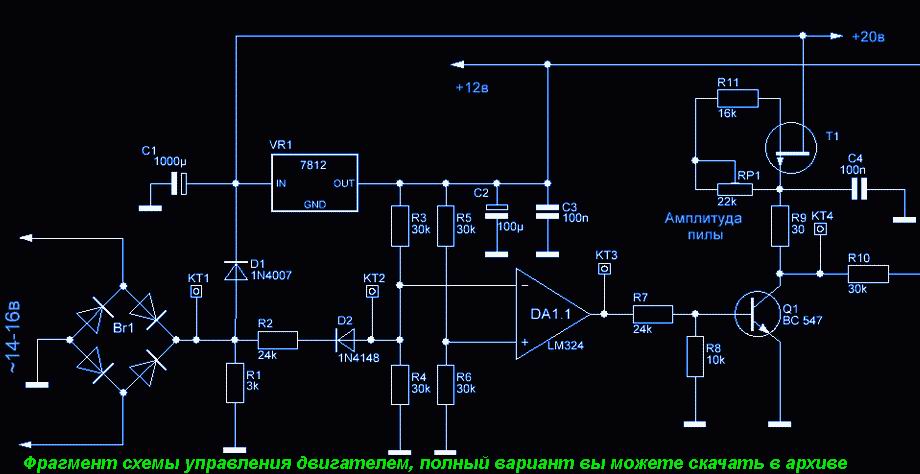
SIFU — impulsu fāzes vadības sistēma veic tīkla sprieguma sinusoidālu pārveidošanu taisnstūrveida impulsu secībā pēc jaudas tiristoru vadības izejām. Kad ķēde ir ieslēgta, tilta taisngriezim pāriet maiņspriegums ar nominālo vērtību 14 - 16 volti un tiek pārveidots par pulsējošu, kas kalpo ne tikai konstrukcijas barošanai, bet arī ierīces darbības sinhronizēšanai. . Diode D2 neizlīdzina kapacitātes impulsus C1. Tad impulsi seko "nulles detektoram", kas izgatavots uz operacionālā pastiprinātāja LM324 elementa DA1.1, kas iekļauts salīdzinājuma režīmā. Kamēr nav impulsu, spriegumi operētājsistēmas pastiprinātāja tiešajā un apgrieztajā ieejā ir aptuveni vienādi, un salīdzinājums ir līdzsvarots.
Kad sinusoīds iet cauri nulles punktam, komparatora apgrieztajā ieejā parādās impulsi, pārslēdzot komparatoru, kā rezultātā DA1.1 izejā tiek ģenerēti taisnstūrveida pulksteņa impulsi, kuru atkārtošanās periods ir atkarīgs no nulles. punktu. Apskatiet viļņu formas, lai saprastu, kā tas darbojas. No augšas uz leju: CT1, CT2, CT3.
Programmā tika modelēta līdzstrāvas motora vadības ķēde. Arhīvā ar apskatāmās konstrukcijas pilno versiju ir šīs programmas projekta fails. Jūs varat to atvērt un vizuāli redzēt, kā šis mezgls darbojas, un attiecīgi izdarīt galīgos secinājumus par līdzstrāvas motora vadību, pirms sākat radioamatieru pašdarināta izstrādājuma montāžu.
Atgriežamies pie darba - pulksteņa impulsi seko integratoram ar tranzistora atslēgu (C4, Q1), kur tiek ģenerēts zāģa spriegums. Brīdī, kad fāze iet cauri nulles punktam, sinhronizācijas impulss atbloķē pirmo tranzistoru, kas izlādē kapacitāti C4. Pēc impulsa samazināšanās tranzistors tiek bloķēts un kapacitāte tiek uzlādēta līdz nākamajam sinhronizācijas impulsam, kā rezultātā uz tranzistora kolektora veidojas lineāri pieaugošs zāģa spriegums (KT4 oscilogramma), ko stabilizē stabils strāvas ģenerators uz unipolārs tranzistors T1.
Zāģa zoba sprieguma amplitūdu aptuveni 9 volti iestata regulēšanas rezistors RP1. Šis spriegums tiek pievadīts uz salīdzinājuma DA1.2 tiešo ieeju. Atsauces spriegums seko komparatora DA1.2 apgrieztajai ieejai un brīdī, kad zāģa zoba sprieguma amplitūda pārsniedz spriegumu pie apgrieztās ieejas, komparators tiek pārslēgts pretējā stāvoklī un tā izejā tiek ģenerēts impulss (oscilogramma). KT4).
Impulss tiek diferencēts caur pasīvo radio komponentu ķēdi R14, C6 un seko līdz otrās daļas bāzei. bipolārais tranzistors, kas tādēļ atveras un uz impulsa transformatora veidojas jaudas tiristoru atvēršanas impulsi. Palielinot vai samazinot atsauces spriegumu, varat pielāgot KT5 impulsu darba ciklu.
Bet mēs neredzēsim impulsus KT5 oscilogrammā, kamēr nenospiedīsim S1 pārslēgšanas slēdzi. Kad tas nav nospiests, barošanas spriegums + 12V caur priekšējiem kontaktiem S1 līdz R12, D3 seko apgrieztajai ieejai DA1.2. Tā kā šis spriegums ir lielāks par "zāģa" spriegumu, salīdzinājums aizveras, un tiristora atvēršanas impulsi netiek ģenerēti.
Lai novērstu avārijas situācijas un elektromotora bojājumus, ja ātruma regulators nav iestatīts uz "0", ķēdē uz elementiem C5, R13 ir paātrinājuma bloks, kas paredzēts vienmērīgai dzinēja paātrināšanai.
Nospiežot pārslēgšanas slēdzi S1, kontakti atveras un kapacitāte C5 sāk vienmērīgi uzlādēties, un spriegums uz kondensatora negatīvās plāksnes tuvojas nullei. Spriegums pie invertējošās ieejas DA1.2 palielinās līdz atsauces sprieguma vērtībai, un komparators sāk ģenerēt impulsus, lai atvērtu jaudas tiristorus. Uzlādes laiku nosaka radio komponenti C5, R13.
Ja dzinēja darbības laikā ir nepieciešams pielāgot tā ātrumu, ķēdei tiek pievienots paātrinājuma un palēninājuma bloks R21, C8, R22. Palielinoties vai samazinoties atsauces spriegumam, kapacitāte C8 tiek vienmērīgi uzlādēta vai izlādēta, kas novērš strauju sprieguma “pieplūdumu” apgrieztajā ieejā un rezultātā novērš strauju motora apgriezienu pieaugumu.
Regulatoru izmanto, lai uzturētu nemainīgu ātrumu kontroles zonā. Regulators ir izgatavots, pamatojoties uz diferenciālo pastiprinātāju ar divu spriegumu summēšanu: atsauci un atgriezenisko saiti. Atsauces spriegumu veido pretestība RP1 un seko caur filtru uz komponentiem R20, C8, R21, kas veic paātrinājuma un palēninājuma vienības funkcijas, un nonāk apgrieztā ieejā DA1.3. Palielinoties atsauces spriegumam pie DA1.3 izejas, izejas spriegums samazinās lineāri.
Regulatora izejas spriegums seko SIFU DA1.2 komparatora apgrieztajai ieejai, kur, summējot ar “zāģa” impulsiem, tas pārvēršas taisnstūra impulsu sērijā, kas seko tiristoriem uz elektrodiem. Palielinoties vai samazinoties atsauces spriegumam, palielinās vai samazinās arī izejas spriegums pie barošanas bloka izejas. Grafikā parādīta dzinēja apgriezienu skaita atkarība no atsauces sprieguma.
Sprieguma dalītājs uz rezistoriem R22, R23, kas savienots ar DA1.3 regulatora tiešo ieeju, ir paredzēts avārijas novēršanai atgriezeniskās saites pārtraukuma gadījumā.
Kad piedziņa ir ieslēgta, tahoģenerators ģenerē spriegumu, kas ir proporcionāls elektromotora ātrumam. Šis spriegums nonāk precīzā detektora DA1.4, DA2.1 ieejā, kas uzbūvēts atbilstoši klasiskajai pilna viļņa shēmai. No tā izejas spriegums caur pasīvo komponentu C10, R30, R33 filtru nonāk OS mērogošanas pastiprinātājā DA2.2. Pastiprinātājs tiek izmantots, lai regulētu OS spriegumu, kas nāk no tahoģeneratora. Spriegums no DA2.2 izejas nonāk DA1.3 ieejā un DA2.3 aizsardzības ķēdē.
Pretestība RP1 ģenerē elektromotora apgriezienus. Strādājot bez slodzes, spriegums mērogošanas pastiprinātāja izejā ir mazāks par spriegumu DA1.3 sestajā tapā, tāpēc piedziņa darbojas kā regulators.
Palielinoties vārpstas slodzei, no tahoģeneratora noņemtais spriegums samazinās, un rezultātā samazinās mērogošanas pastiprinātāja izejas spriegums. Ja šis līmenis ir mazāks nekā DA1.3 darbības pastiprinātāja 5. daļā, diskdzinis nonāks pašreizējā stabilizācijas zonā. Samazinot spriegumu pie neinvertējošās ieejas DA1.3, samazinās spriegums tā izejā, un, tā kā tas darbojas uz invertējošā pastiprinātāja DA1.2, tas palielinās tiristoru atvēršanas leņķi un līdz ar to palielinās līmeni pie izejas. motora armatūra.
Aizsardzība pret ātruma pārsniegšanu ir uzstādīta uz darbības pastiprinātāja DA2.3, kas iekļauts kā salīdzinājums. Tās apgrieztā ieeja saņem atsauces spriegumu no dalītāja R36, R37, RP3. Pretestība RP3 regulē aizsardzības darbības līmeni. Spriegums no pastiprinātāja DA2.2 izejas iet uz tiešo ieeju DA2.3.
Pārsniedzot ātrumu virs nominālā, salīdzinājuma tiešā ieeja pārsniedz aizsardzības iestatījuma slieksni, ko nosaka pretestība RP3 un salīdzinājuma slēdži.
Sakarā ar pozitīvu atgriezenisko saiti ķēdē, R38 noved pie salīdzinājuma “fiksācijas”, un VD12 diode neļauj salīdzinājumam atiestatīt. Kad tiek iedarbināta aizsardzība, salīdzinājuma izeja caur VD14 diodi seko SIFU apgrieztajai ieejai 13 DA1.2, un, tā kā aizsardzības spriegums ir virs “zāģa” līmeņa, vadības impulsu izvade uz elektrodiem jaudas tiristori tiks uzreiz aizliegti.
Spriegums no aizsardzības komparatora DA2.3 izejas atbloķē tranzistoru VT4, kas ieslēdz releju P1.1 un iedegas gaismas diode, kas norāda uz negadījumu. Aizsardzību būs iespējams noņemt, ja diskdzinis ir pilnībā izslēgts, un pēc 5–10 sekunžu pauzes atkal pievienojiet tam strāvu.
Vadības bloka jaudas daļa ir parādīta attēlā zemāk:
Transformatoru Tr1 izmanto vadības bloka ķēdes barošanai. Taisngriezis ir samontēts pēc pustilta ķēdes, un tajā ir divas jaudas diodes D1, D2 un divi jaudas tiristori T1, T2, kā arī aizsargdiode D3. Ierosmes tinumu darbina savs atsevišķs transformators un taisngriezis. Ja motoram nav tahoģeneratora, tad ātruma kontroles OS var ieviest šādi:
Ja tiek izmantots strāvas transformators, līdzstrāvas motora vadības ķēdes džemperim P1 jābūt iestatītam pozīcijā 1-3.
Varat arī izmantot armatūras sprieguma sensoru:
Armatūras sprieguma sensors ir filtrs-dalītājs, kas savienots tieši ar armatūras spailēm. Disks ir konfigurēts šādi. Rezistori "Reference" un "Scaling Uoc" ir pagriezti vidējā stāvoklī. Armatūras sprieguma sensora pretestība R5 ir savīti līdz minimumam. Mēs ieslēdzam piedziņu un iestatām armatūras spriegumu līdz aptuveni 110 voltiem. Mērot armatūras spriegumu, mēs sākam griezt pretestību R5. Noteiktā izmaiņu brīdī armatūras spriegums sāks kristies, kas norāda, ka OS ir nostrādājusi.
Programmā ir izveidots iespiedshēmas plates zīmējums līdzstrāvas motora vadībai, un jūs varat viegli izgatavot iespiedshēmas plati ar savām rokām, izmantojot metodi
Sāksim iestatīt dizainu, pārbaudot barošanas spriegumus op-amp DA1, DA2. Mikroshēmas ieteicams uzstādīt rozetēs. Pēc tam mēs pārbaudām viļņu formas kontroles punktos CT1, CT2, CT3. Punktā CT4. mums vajadzētu redzēt zāģa zoba impulsus, kad poga ir atvērta.
Ar trimera pretestību RP1 mēs iestatījām “zāģa” šūpošanos uz aptuveni 9 voltiem. Kontrolpunktā CT3 impulsa ilgums ir aptuveni 1,5 - 1,8ms, ja mēs to neredzam, tad samazinot pretestību R4 mēs sasniedzam nepieciešamo ilgumu.
Pagriežot RR1 sviru vadības punktā KT5, mēs kontrolējam impulsu darba cikla izmaiņas no maksimālā līdz to pilnīgai izzušanai pie minimālās pretestības RR1. Šajā gadījumā vajadzētu mainīties barošanas blokam pievienotās spuldzes spilgtumam, kuru mēs pieslēdzām kā slodzi.
Tad mēs savienojam vadības bloku ar dzinēju un tahoģeneratoru. Iestatiet regulatora RR1 armatūras spriegumu 40-50 volti. Pretestībai RP3 jābūt vidējā stāvoklī. Izmērot spriegumu pie motora armatūras, pagrieziet pretestību RP3. Noteiktā regulēšanas brīdī armatūras spriegums sāks kristies, kas norāda, ka atgriezeniskā saite ir nostrādājusi.
Ja tiek izmantota armatūras strāvas atgriezeniskā saite, ir nepieciešams strāvas transformators, kas ir iekļauts taisngrieža strāvas ķēdē. Strāvas transformatora kalibrēšanas ķēde ir apskatīta tālāk. Izvēloties pretestību, transformatora izejā iegūstiet maiņspriegumu 2 ÷ 2,5 V. Slodzes jaudai RN1 jābūt vienādai ar motora jaudu
Atcerieties, ka nav ieteicams ieslēgt strāvas transformatoru bez slodzes rezistora.
Mēs savienojam strāvas transformatoru ar OS ķēdi P1 un P2. Regulēšanas laikā ieteicams atlodēt D12 diodi, lai nebūtu viltus aizsardzības darbības. Oscilogrammas kontroles punktos KT8, KT9, KT10 ir parādītas attēlā zemāk.
Turpmākā regulēšana ir tāda pati kā tahoģeneratora izmantošanas gadījumā.
Šis līdzstrāvas motora vadības bloks tika izgatavots ar rokām urbšanas mašīnai. Skatiet fotoattēlus arhīvā, kas atrodas zaļajā saitē augstāk.
Līdzstrāvas motoros griezes momentu rada reakcija starp diviem magnētiskajiem laukiem: vienu lauku izveido stacionāra lauka tinums, bet otru - ar tinumiem rotējošā enkurā. Dažiem līdzstrāvas motoriem nav lauka tinuma, tā vietā ir liels pastāvīgie magnēti, saglabājot nemainīgu stacionāro magnētisko lauku jebkuros darbības apstākļos.
Jebkurā gadījumā līdzstrāvas motora darbības princips ir tāds, ka strāva, kas iet caur armatūru, rada magnētisko lauku, kas mēģina saskaņot ar stacionāro lauku. Un tā enkurs griežas:
tomēr kolekcionārs(kā sauc segmentētu vara sloksņu komplektu), pārtrauc elektrisko kontaktu ar jau "izlīdzināto" tinumu un ierosina citu tinumu (vai, kā vienkāršā piemērā, kas parādīts iepriekš, pārlieku uzbudina to pašu ķēdi pretējā virzienā), radot vēl vienu nesaskaņotu magnētiskais lauks, kas turpina griezt enkuru. Elektriskais kontakts starp rotējošajiem komutatora segmentiem un stacionāro barošanas avotu notiek caur oglekļa sukām. Šīs birstes laika gaitā nolietojas (tāpat kā pats komutators), un tāpēc tās ir periodiski jāmaina.
Lielākā daļa rūpniecisko līdzstrāvas motoru ir izgatavoti ar vairākiem armatūras tinumiem, nevis tikai vienu, kā parādīts iepriekš sniegtajā vienkāršotajā attēlā. Šeit ir redzams fotoattēls ar lielo (1250 ZS) līdzstrāvas elektromotoru, ko izmanto prāmja piedziņai, ar tinumiem un armatūru:
Viena šī motora birstes komplektācija parāda tuvplānu abām oglekļa birstēm, atsperes turētājam un vairākiem komutatora stieņiem, ar kuriem birste saskaras, kad armatūra griežas.

Līdzstrāvas motoros parādās šādas attiecības starp mehāniskajiem un elektriskajiem lielumiem:
Griezes moments:
- Mirklis ir tieši proporcionāls spēkam. magnētiskais lauks armatūra, kas, savukārt, ir tieši proporcionāla strāvai, kas iet caur armatūras tinumiem;
- Griezes moments ir arī tieši proporcionāls pastāvīgā magnētiskā lauka stiprumam, kas, savukārt, ir tieši proporcionāls strāvai, kas iet caur aizraujošo tinumu (motorā bez magnētiem).
- Ātrumu ierobežo EML, ko ģenerē armatūra, rotējot pastāvīgā magnētiskajā laukā. Šis EMF ir tieši proporcionāls armatūras griešanās ātrumam, kā arī ir tieši proporcionāls pastāvīgā magnētiskā lauka stiprumam (kas ir tieši proporcionāls aizraujošā tinuma strāvai elektromotorā bez magnētiem);
- Tāpēc ātrums ir tieši proporcionāls armatūras spriegumam;
- Arī ātrums ir apgriezti proporcionāls pastāvīgā magnētiskā lauka stiprumam, kas ir tieši proporcionāls strāvai, kas iet caur aizraujošajiem tinumiem (motorā bez magnētiem).
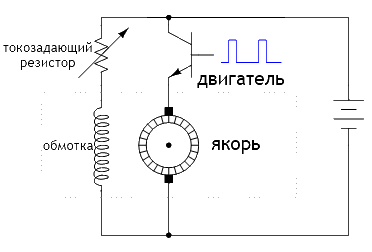
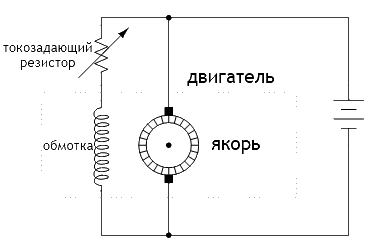
Strāvas iestatīšanas rezistora pretestības samazināšanās ļauj vairāk strāvas plūst caur piedziņas tinumu, palielinot tā magnētisko lauku. Tam būs divējāda ietekme uz motora darbību: pirmkārt, motors radīs lielāku griezes momentu nekā iepriekš (ar tādu pašu enkura strāvas daudzumu), jo spēcīgāks armatūras magnētiskais lauks iedarbosies uz enkuru; otrkārt, motora ātrums samazināsies, jo rotējošais armatūra ar tādu pašu rotācijas ātrumu ģenerēs lielu aizmugures EML, un šis aizmugurējais EMF, protams, mēģinās saskaņot pielietoto līdzstrāvas avota spriegumu. No otras puses, mēs varam palielināt līdzstrāvas motora ātrumu (un samazināt izejas griezes momentu), palielinot vadības rezistora pretestību, vājinot stacionāro magnētisko lauku, kas rotē armatūru.
Regulējot tinuma strāvu, jūs varat mainīt līdzsvaru starp ātrumu un griezes momentu, taču ar to nepietiek, lai kontrolētu kopējo jauda dzinējs. Lai kontrolētu līdzstrāvas motora izejas jaudu, mums jākontrolē arī armatūras spriegums un strāva. Mainīgie rezistori var piemērot šim uzdevumam, taču šī metode pašlaik netiek izmantota, jo tā noved pie jaudas zuduma.
Labākais risinājums būtu ieslēgt elektronisko jaudas kontroles ķēdi tranzistoru slēdžiātri izslēdzot un ieslēdzot motora armatūru ķēdē. Šo vadības veidu sauc par impulsa platuma modulāciju vai PWM.
(impulsa ilguma attiecība pret atkārtošanās periodu, apgriezta pret cikls impulsa lielums) nosaka dzinējam piegādātās jaudas proporciju:
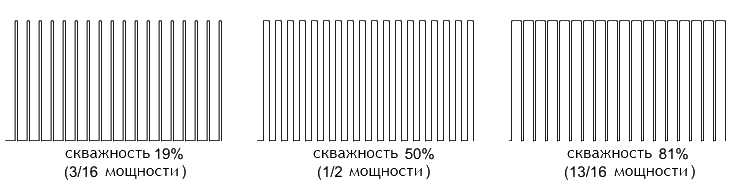
Attēlos kļūda ir nevis "darba cikls", bet gan "darba koeficients"
Tādas elektroniskā shēma jaudas kontrole parasti tiek saukta par braukts. Tātad mainīga ātruma piedziņa (vai VSD) ir lieljaudas ķēde, ko izmanto, lai kontrolētu līdzstrāvas motora ātrumu. Motora piedziņas var manuāli iestatīt, lai iedarbinātu motoru ar noteiktu ātrumu, vai arī tās var saņemt elektroniskus vadības signālus, lai mainītu motora ātrumu tādā pašā veidā, kā elektroniskie signāli kontrolē kustību. aprīkots attālā sistēma Vadības signālu pārraide, piedziņa darbojas tāpat kā jebkurš cits gala izpildelements: izpildot kontroliera komandas, tā stabilizē noteiktu tehnoloģisko parametru, .
Tradicionālā tehnoloģija priekš komutācijas barošanas avots Līdzstrāvas motora lietošanas ķēde vadāms taisngriezis, kurā pārveidot maiņstrāva konstantās, nevis parastās taisngriežas diodes, tiek izmantoti tiristori. Rūpniecisko līdzstrāvas motoru galvenais barošanas avots joprojām ir maiņstrāva, un šī maiņstrāva kādā sistēmas punktā ir jāpārvērš līdzstrāvai; ir jēga integrēt vadību tieši šajā taisngrieža blokā:
Vadāmā taisngrieža ķēde darbojas pēc principa, ka tiek mainīts “palaišanas” impulsa laiks attiecībā pret maiņstrāvas svārstību impulsiem. Jo agrāk katrā maiņstrāvas periodā tiristors atveras, jo ilgāk tas nodos strāvu motoram. Fāzes vadības ķēde ir atbildīga par impulsu ģenerēšanu un to ilgumu.
Līdzstrāvas piedziņa, kas vienkārši kontrolē motora jaudu, būtu nepārdomāta un grūti kontrolējama lielākajai daļai procesu. Tas, ko jūs ideālā gadījumā vēlētos no regulējamās piedziņas, ir precīza vadība ātrumu dzinējs. Šī iemesla dēļ lielākā daļa piedziņu ir izstrādātas, lai saņemtu atgriezenisko saiti no tahometra, kas mehāniski savienots ar motora vārpstu. Tahometrs parasti ir neliels ģenerators, kas rada pastāvīgs spiediens, tieši proporcionāls vārpstas griešanās ātrumam (ar jaudu 0-10 V). Pēc viņa liecībām regulējamā piedziņa droseles elektriskā jauda, tiek piegādāts dzinējam tā, lai griešanās ātrums sakristu ar doto vadības signālu. Ar iebūvētu atgriezeniskās saites cilpu ātruma kontrolei mainīga ātruma piedziņa kļūst par "sekotāja kontrolieri" vadības sistēmā. Disks var pieņemt ātruma atsauces izvadi no