การพันของลวดลัดวงจรประกอบด้วยส่วน m การเปลี่ยนเฟสระหว่าง EMF ของสเตเตอร์อุปนัยที่หมุนด้วยสนามแม่เหล็กในแท่งสองแท่งที่อยู่ติดกันมีค่าเท่ากับ
p คือจำนวนคู่ขั้วมอเตอร์
 2 - จำนวนรอบในแต่ละเฟส
2 - จำนวนรอบในแต่ละเฟส
ปล่อยให้วงจรโรเตอร์เปิดอยู่นั่นคือ ไม่มีกระแสไฟฟ้าอยู่ในนั้น แรงแม่เหล็กไฟฟ้าไม่กระทำบนโรเตอร์และไม่เคลื่อนที่ เมื่อโรเตอร์อยู่กับที่ ความถี่ของ EMF ที่เหนี่ยวนำในขดลวดจะเท่ากับความถี่ของกระแสในวงจรขดลวดสเตเตอร์
ปัญหาในการบำบัดน้ำเสียทางชีวภาพ ดังนั้นการพัฒนาระบบบำบัดน้ำเสียที่ก้าวหน้าและมีประสิทธิภาพจึงมีความสำคัญมากขึ้นเรื่อยๆ ในกระบวนการทางชีววิทยา เครื่องเป่าลมจะเป่าลมเข้าไปในแอ่งเติมอากาศเพื่อเติมออกซิเจนให้กับแบคทีเรียแอโรบิกนับล้านที่สลายส่วนประกอบของน้ำเสียอินทรีย์
โบลเวอร์แบบแรงเหวี่ยงแบบธรรมดาใช้มอเตอร์แบบอะซิงโครนัสที่มีกระปุกเกียร์แบบกลไกและตลับลูกปืนที่หล่อลื่นด้วยน้ำมัน ซึ่งมักจะมีการสูญเสียพลังงานจำนวนมากและการสึกหรอสูง ซึ่งยังนำไปสู่ต้นทุนการดำเนินงานที่สูงอีกด้วย นอกจากนี้ โบลเวอร์เหล่านี้มักต้องการพลังงานทั้งหมด 50 เปอร์เซ็นต์หรือมากกว่าของความต้องการพลังงานทั้งหมดของโรงบำบัดน้ำเสีย อันที่จริง การใช้พลังงานคิดเป็น 80 เปอร์เซ็นต์ของต้นทุนวงจรชีวิตของพัดลม ดังนั้นต้นทุนการลงทุนเริ่มต้นของอุปกรณ์จึงต่ำกว่าต้นทุนการเป็นเจ้าของทั้งหมด
f คือความถี่เครือข่าย 50 Hz;
หากโรเตอร์หมุนด้วยความถี่ n 2 ตามสนามแม่เหล็กหมุนของสเตเตอร์ ความถี่ของ EMF ของขดลวดเหนี่ยวนำจะลดลงและเท่ากับ
หากวงจรโรเตอร์ปิด กระแสจะอยู่ในรูปแบบ:
1) ระบบหลายเฟสที่มีจำนวนเฟส m 2 = N ในกรณี โรเตอร์กรงกระรอก.
อันเป็นผลมาจากต้นทุนด้านพลังงานที่สูงขึ้นและความก้าวหน้าในเทคโนโลยีการขับเคลื่อน ได้มีการเปลี่ยนทางเทคโนโลยีไปสู่คอมเพรสเซอร์แบบแรงเหวี่ยงความเร็วแปรผันที่ขับเคลื่อนด้วยความเร็วรอบโดยตรงที่มีประสิทธิภาพมากขึ้น โรเตอร์มีลักษณะเหมือนเข็มทิศที่จัดตำแหน่งตัวเองกับสนามแม่เหล็กไฟฟ้าที่สร้างโดยสเตเตอร์ โรเตอร์หมุนด้วยความเร็วเท่ากันกับสนามแม่เหล็กหมุนของสเตเตอร์ นั่นคือการหมุนของเพลาจะซิงโครไนซ์กับความถี่ปัจจุบัน โลกที่หายาก แม่เหล็กถาวรนั่งตรงเพลาและยึดด้วยบุชคาร์บอนไฟเบอร์
2) ระบบสามเฟสที่มีจำนวนเฟส m 2 \u003d 3 ในกรณีของโรเตอร์เฟส => กระแสในขดลวดโรเตอร์จะคล้ายกับกระแสในขดลวดสเตเตอร์จะต้องกระตุ้นสนามแม่เหล็กหมุน
34. การทำงานของสนามแม่เหล็กหมุนของมอเตอร์เหนี่ยวนำ
ไม่เกี่ยวข้อง คือความถี่ของการหมุนของสนามนี้สัมพันธ์กับโรเตอร์

ความเร็วถูกควบคุมโดยไดรฟ์ความเร็วตัวแปร แนวคิดของไดรฟ์ตรงที่มีใบพัดที่ติดตั้งโดยตรงบนเพลามอเตอร์ ทำให้การส่งกำลังและส่วนประกอบทางกลอื่นๆ ที่เกี่ยวข้องของการออกแบบทั่วไปไม่จำเป็น และไม่เพียงแต่ให้ความปลอดภัยในการปฏิบัติงานมากขึ้นเท่านั้น แต่ยังช่วยลดการบำรุงรักษาได้อย่างมากอีกด้วย
ตลับลูกปืนแม่เหล็กแบบแอคทีฟเป็นอุปกรณ์เมคคาทรอนิกส์ที่ทันสมัยสำหรับการติดตั้งแบบไม่สัมผัสของเพลาหมุนหรืออยู่กับที่ในสนามแม่เหล็ก ตำแหน่งเพลาจะคงอยู่โดยใช้แรงแม่เหล็กไฟฟ้าที่ควบคุมในทิศทางรัศมีและแนวแกนกับโรเตอร์
เพราะ ตัวโรเตอร์หมุนไปในทิศทางเดียวกันด้วยความถี่ n 2 จากนั้นสนามของมันจะหมุนในอวกาศด้วยความถี่เท่ากับ
เหล่านั้น. สนามโรเตอร์หมุนพร้อมกันกับสนามสเตเตอร์ ซึ่งเป็นเงื่อนไขลักษณะเฉพาะสำหรับการถ่ายเทพลังงานโดยสมบูรณ์จากสเตเตอร์ไปยังโรเตอร์
เมื่อเพิ่มสนามแม่เหล็กหมุนของสเตเตอร์และโรเตอร์จะสร้างสนามแม่เหล็กหมุนที่ทำงานอยู่ มอเตอร์เหนี่ยวนำซึ่งทำหน้าที่เป็นตัวเชื่อมเดียวกันระหว่างขดลวดสเตเตอร์และโรเตอร์ เช่นเดียวกับสนามแม่เหล็กไฟฟ้ากระแสสลับในแกนหม้อแปลง ซึ่งจะถ่ายเทพลังงานจากขดลวดปฐมภูมิไปยังขดลวดทุติยภูมิ นี่คือสาขาการทำงานที่คุณต้องรู้เพื่อวิเคราะห์กระบวนการในวงจรสเตเตอร์และโรเตอร์
ระบบมีส่วนประกอบไฟฟ้าและอิเล็กทรอนิกส์ โซลูชันที่ออกแบบมาสำหรับการใช้งานซุปเปอร์ชาร์จเจอร์ประกอบด้วยชุดประกอบแบริ่งสเตเตอร์ที่เหมือนกันสองชุด ซึ่งสามารถใช้ทั้งแรงในแนวรัศมีและแนวแกนกับเพลาได้ แต่ละบล็อกประกอบด้วยตัวคลังสินค้า เซ็นเซอร์ตำแหน่ง เซ็นเซอร์อุณหภูมิ และถังรับ ตัวเข้ารหัสจะวัดการกระจัดของเพลาในแนวรัศมีและแนวแกนด้วยความแม่นยำน้อยกว่าหนึ่งไมโครมิเตอร์ รองรับการติดตั้งเป็นอุปกรณ์ความปลอดภัยเพื่อรองรับเพลาที่เหลือ อย่างไรก็ตามพวกเขาจะไม่ทำงานเมื่อเปิดใช้งานแบริ่งแม่เหล็ก
35. ลักษณะทางกลของมอเตอร์เหนี่ยวนำ
เพื่อการทำงานที่เสถียรของเครื่องยนต์ สิ่งสำคัญคือต้องสร้างสมดุลของแรงบิดและแรงบิดเบรกโดยอัตโนมัติ เมื่อภาระบนเพลามอเตอร์เพิ่มขึ้น แรงบิดเบรกจะเพิ่มขึ้น และแรงบิดควรเพิ่มขึ้นตามลำดับ
ในแอปพลิเคชันนี้ ระยะห่างในแนวรัศมีหรือช่องว่างอากาศแม่เหล็กระหว่างสเตเตอร์และโรเตอร์จะอยู่ที่ประมาณ 500 µm เนื่องจากการออกแบบจึงไม่มีการสัมผัสและการสึกหรอของส่วนประกอบ ไม่จำเป็นต้องหล่อลื่น แบริ่งแม่เหล็กอิเล็กทรอนิกส์ส่วนใหญ่ประกอบด้วยตัวประมวลผลสัญญาณดิจิตอล สมองของระบบ และเพาเวอร์แอมป์ที่จ่ายแบริ่งแม่เหล็ก ไฟฟ้าช็อตเพื่อสร้าง สนามแม่เหล็ก.
ความแข็งแกร่งและการหน่วงของตลับลูกปืนได้รับการปรับให้เหมาะสมโดยใช้อัลกอริธึมทางคณิตศาสตร์ที่ซับซ้อนเพื่อให้มั่นใจว่าเครื่องจักรทำงานได้อย่างเสถียรภายใต้สภาวะการทำงานที่หลากหลาย การควบคุมแบบแอคทีฟนี้แตกต่างจากตลับลูกปืนทั่วไปโดยพื้นฐาน และมีประโยชน์มากมาย เช่น การป้องกันการสั่นสะเทือนและความไม่สมดุล
พี เฟอร์ - พลังงานกลบนเพลามอเตอร์
2
– ความเร็วเชิงมุมโรเตอร์
การปรับสมดุลของโมเมนต์ของเครื่องยนต์ที่กำลังวิ่งนั้นดำเนินการดังนี้ เมื่อภาระบนเพลาเพิ่มขึ้น แรงบิดในการเบรกจะมากกว่าแรงบิด อันเป็นผลมาจากความเร็วของโรเตอร์ลดลง สลิปก็เพิ่มขึ้น การลื่นที่เพิ่มขึ้นทำให้แรงบิดเพิ่มขึ้น ความสมดุลของโมเมนต์กลับคืนมาด้วยการสลิปที่เพิ่มขึ้น
ในกรณีที่ไฟฟ้าขัดข้อง ระบบจะติดตั้งแหล่งจ่ายไฟเพื่อความปลอดภัยเพื่อรักษาตลับลูกปืนแม่เหล็ก ในกรณีที่ไฟฟ้าดับ มอเตอร์จะเปลี่ยนเป็นโหมดเครื่องกำเนิดไฟฟ้า ซึ่งจะขับเคลื่อนแบริ่งแม่เหล็กจนกว่าเพลาจะไปถึงความเร็วต่ำและหมุนไปที่ตัวหยุดตลับลูกปืนโดยไม่ทำลายระบบ
ตัวเรือนมอเตอร์ได้รับการออกแบบสำหรับการระบายความร้อนด้วยอากาศหรือน้ำ ทั้งนี้ขึ้นอยู่กับกำลังของมอเตอร์หรือการระบายความร้อนที่ต้องการ ลูกค้าต้องจัดเตรียมส่วนประกอบในการทำความเย็น ไดรฟ์ความเร็วตัวแปรมีจำหน่ายจากผู้ผลิตที่ได้รับอนุญาตหลายราย ขอบเขตการจัดส่งแตกต่างกันไป ตั้งแต่ส่วนประกอบหลักไปจนถึงชิ้นส่วนสำเร็จรูป ลูกค้าสามารถใช้ประโยชน์จากความยืดหยุ่นในการออกแบบหรือใช้ประโยชน์จากการจัดส่งแบบครั้งเดียวได้


R 2 - ความต้านทานเชิงรุก;
X race.2 - ความต้านทานกระจัดกระจายแบบอุปนัย

ประสิทธิภาพสูงขึ้นที่พิกัดและโหลดบางส่วน - มากกว่ามอเตอร์ทั่วไป 10 เปอร์เซ็นต์ อายุการใช้งานยาวนานขึ้น ปฏิเสธ ต้นทุนการผลิตด้วยการออกแบบที่กะทัดรัดยิ่งขึ้น ระดับเสียงที่ต่ำกว่า การปฏิบัติตามกฎระเบียบปัจจุบัน
- ความน่าเชื่อถือของระบบที่สูงขึ้น
- ไม่ต้องการการบำรุงรักษา
- ซอฟต์แวร์วินิจฉัยที่มีประสิทธิภาพ
- เพิ่มประสิทธิภาพการควบคุมกระบวนการ

 - ตัวประกอบกำลัง
- ตัวประกอบกำลัง
36) อุปกรณ์และหลักการทำงาน ขอบเขตการใช้งานของเครื่องจักรไฟฟ้ากระแสตรง (mpt)
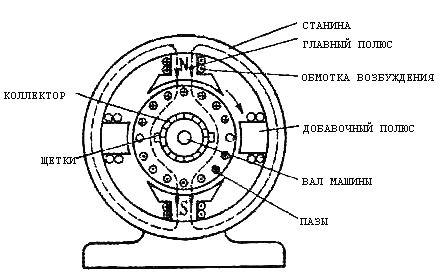
MPT ประกอบด้วยส่วนที่ตายตัวซึ่งสนามแม่เหล็กหลักถูกกระตุ้นและส่วนที่หมุนได้ซึ่งทำให้เกิดแรงเคลื่อนไฟฟ้า กระแสจากแรงเคลื่อนไฟฟ้านี้ซึ่งมีปฏิสัมพันธ์กับสนามแม่เหล็กหลักสร้างแรงบิด (ในโหมดมอเตอร์จะหมุนในโหมดเครื่องกำเนิดไฟฟ้าจะเบรก)
กรณีศึกษา โรงบำบัดน้ำเสียในฝรั่งเศสสำหรับเมืองที่มีประชากรหลายพันคน รวมถึงอุตสาหกรรมในท้องถิ่น ติดตั้งเครื่องเป่าลมขนาด 80 กิโลวัตต์สี่เครื่อง อย่างไรก็ตาม พวกเขาทำให้ผู้ปฏิบัติงานประสบปัญหาหลายประการ: ความล้มเหลวบ่อยครั้ง การใช้พลังงานสูง ระดับสูงเสียงรบกวน ปัญหาขั้นตอน ฯลฯ ที่น่าทึ่งยิ่งกว่าคือการลดการใช้พลังงาน การอัพเกรดเป็นพัดลมที่มีลูกปืนแม่เหล็กมีประสิทธิภาพมากขึ้น ช่วยลดค่าเสื่อมราคาได้ในเวลาน้อยกว่าสองปี และเนื่องจากการประหยัดพลังงานเท่านั้น
ส่วนคงที่ประกอบด้วยโครงและเสาที่ติดอยู่ เสาแบ่งออกเป็นเสาหลักซึ่งฟลักซ์แม่เหล็กหลักตื่นเต้นและเสาเพิ่มเติมซึ่งติดตั้งเพื่อปรับปรุงการสลับของเครื่อง
หลักการทำงาน
การศึกษานี้แสดงให้เห็นถึงกลยุทธ์ในการลดต้นทุนการดำเนินงาน ที่นี่ การเลือกอุปกรณ์ที่เหมาะสมอย่างชาญฉลาดช่วยประหยัดค่าใช้จ่ายได้มาก โบลเวอร์เหล่านี้ออกแบบมาสำหรับถังเติมอากาศขนาดใหญ่ที่จำเป็นในการจัดหาน้ำสะอาดให้กับใจกลางเมืองที่เติบโตอย่างรวดเร็ว
อุปสงค์ในจีนมีมหาศาล มีการสร้างโรงบำบัดน้ำเสียใหม่หลายร้อยแห่งทุกปี คาดว่าจะมีมูลค่า 380 พันล้านดอลลาร์ในแผน 5 ปีที่สิบสอง การเคลื่อนไหวส่วนใหญ่ที่เราทำกับเครื่องจักรนั้นเป็นแบบเส้นตรง การลำเลียง เช่น การเจาะ การกด และการเป่า หรือการร้อยด้ายในเครื่องทอผ้าอัตโนมัติ เป็นกระบวนการที่ประกอบด้วยการเคลื่อนไหวโดยตรง อย่างไรก็ตาม มีการจัดหาไดรฟ์สำหรับเครื่องจักรของเราให้ เครื่องยนต์โรตารี่อย่างไร การเคลื่อนที่แบบหมุนซึ่งก่อนอื่นจะต้องแปลงเป็นการแปลโดยอัตโนมัติซึ่งแน่นอนว่าพลังงานจะหายไป
รถ กระแสตรงสามารถทำงานได้ในสองโหมด: มอเตอร์และเครื่องกำเนิดไฟฟ้า ขึ้นอยู่กับพลังงานที่จ่ายไป - หากใช้ไฟฟ้า เครื่องไฟฟ้าจะทำงานในโหมดมอเตอร์ไฟฟ้า และหากเป็นกลไก เครื่องจะทำงานในโหมดเครื่องกำเนิดไฟฟ้า อย่างไรก็ตาม ตามกฎแล้วเครื่องจักรไฟฟ้าได้รับการออกแบบโดยผู้ผลิตสำหรับโหมดการทำงานเฉพาะอย่างใดอย่างหนึ่ง - ไม่ว่าจะในโหมดของเครื่องกำเนิดไฟฟ้าหรือมอเตอร์ไฟฟ้า
ในกรณีของเครื่องยนต์เบนซินหรือเครื่องยนต์ไอน้ำ แม้แต่การเคลื่อนที่เชิงเส้น จังหวะลูกสูบ จะถูกแปลงเป็นการหมุนครั้งแรก ซึ่งในหลายๆ การใช้งานจะถูกแปลงเป็นกระบวนการเชิงเส้นอีกครั้ง สุดท้ายก็กลายเป็น ยานพาหนะอา หน้าที่ของใครคือต้องอยู่บนเครื่องบินต่อไป
เมื่อเร็ว ๆ นี้เองที่เทคโนโลยีพยายามรักษาการเปลี่ยนแปลงของการเคลื่อนไหวและเคลื่อนย้ายชิ้นส่วนเครื่องจักรไปพร้อม ๆ กัน น้ำหนักเบาใช้หลักการเหนี่ยวนำหรือ มอเตอร์สามเฟสสำหรับการเคลื่อนไหวในแนวนอน โดยทั่วไป มอเตอร์เหนี่ยวนำประกอบด้วยสิ่งที่เรียกว่าสเตเตอร์ วงแหวนแม่เหล็กไฟฟ้าแบบตายตัว และโรเตอร์ ดรัมแท่งทองแดงซึ่งแขวนอยู่ตรงกลางวงแหวนแบบหมุนได้ แม่เหล็กไฟฟ้าสเตเตอร์ถูกขับเคลื่อน กระแสไฟสามเฟสในลักษณะที่สนามแม่เหล็กหมุนถูกสร้างขึ้นโดยเฟสสลับ กระแสสลับซึ่งจับโรเตอร์และหมุนด้วย
พื้นที่สมัคร
เครื่องจักรไฟฟ้ากระแสตรงใช้เป็นเครื่องกำเนิดไฟฟ้าและเป็นมอเตอร์ มอเตอร์กระแสตรงที่ใช้กันอย่างแพร่หลาย ได้แก่ :
มีการใช้กันอย่างแพร่หลายในการขับเคลื่อนวิธีการยกเป็นมอเตอร์เครน
ยานพาหนะขับเคลื่อนเป็นมอเตอร์ฉุด
ไม่อยู่ในมอเตอร์แบบอะซิงโครนัส การเชื่อมต่อไฟฟ้าระหว่างส่วนที่เคลื่อนที่และส่วนที่ตายตัว ข้อได้เปรียบนี้เหนือกว่ามอเตอร์ไฟฟ้าอื่นๆ ในการขจัดเครื่องบดหรือแปรง มอเตอร์แบบอะซิงโครนัสเป็นที่นิยมอย่างมากในอุตสาหกรรมนี้
ตอนนี้วิศวกรในแมนเชสเตอร์ได้ตัดวงแหวนสเตเตอร์แล้ว พูดง่ายๆ ก็คือ วางมันเหมือนแถบบนเครื่องบิน ตอนนี้สนามแม่เหล็กไม่หมุนอีกต่อไป แต่มันย้ายจากปลายด้านหนึ่งของแถบไปยังอีกด้านหนึ่ง และชิ้นส่วนของทองแดงที่ป้อนเข้าสู่สนามนี้จะเคลื่อนที่ไปข้างหน้า แทนที่จะเป็นชิ้นส่วนทองแดง สายพานลำเลียงโลหะแบบยืดหยุ่นสามารถวิ่งทับแถบสเตเตอร์ได้ น้ำหนักเบาได้ทดสอบสายพานลำเลียงดังกล่าวในทางปฏิบัติแล้ว อย่างไรก็ตาม พวกมันจะมีความน่าสนใจมากขึ้นก็ต่อเมื่อมีความเร็วมากกว่า 20 กิโลเมตรต่อชั่วโมง
เพื่อขับเคลื่อนอุปกรณ์อัตโนมัติ
สำหรับการขับเคลื่อนโรงสีกลิ้ง
ในการขับลิฟต์แบบปกติ
ขดลวดของโรเตอร์กรงกระรอกประกอบด้วยแท่ง N ระหว่าง EMF ที่เกิดจากสนามแม่เหล็กหมุนของสเตเตอร์ในแท่งสองแท่งที่อยู่ติดกัน การเลื่อนเฟสคือ 360° พี/N. เราสามารถสรุปได้ว่าจำนวนเฟสของโรเตอร์กรงกระรอกเท่ากับจำนวนแท่ง ม. 2 \u003d ยังไม่มีข้อความและจำนวนรอบในแต่ละเฟส w 2 \u003d 1/2.
ให้เราสมมติว่าทิศทางของกระแสไหลในกลุ่มเฟสล่างในสเตเตอร์ สนามแม่เหล็กจะออกจากสเตเตอร์ในกลุ่มเฟสบนและล่าง แต่ละอันจะเป็นขั้วแม่เหล็กเหนือ ฟลักซ์แม่เหล็กในเครื่องนี้จะต้องกลับไปที่สเตเตอร์ระหว่างกลุ่มเฟสสองกลุ่ม ทำให้เกิดขั้วแม่เหล็กใต้คู่หนึ่งเป็นอนุกรม โปรดทราบว่าสเตเตอร์มีขั้วแม่เหล็กสี่ขั้ว มากเป็นสองเท่าของเมื่อก่อน โรเตอร์ในมอเตอร์แบบนี้คือกรง เนื่องจากโรเตอร์ตัวแยกมักจะมีเสามากเท่ากับที่เสามีสเตเตอร์ ดังนั้นจึงสามารถปรับได้โดยการเปลี่ยนจำนวนขั้วในสเตเตอร์
ในทำนองเดียวกันวงจรเฟสโรเตอร์เป็นระบบสามเฟส m2=3ด้วยจำนวนรอบ w2ในทุกขั้นตอน ที่นี่และในอนาคต ปริมาณทั้งหมดที่เกี่ยวข้องกับเฟสโรเตอร์จะถูกทำเครื่องหมายด้วยดัชนี 2 และปริมาณที่เกี่ยวข้องกับเฟสสเตเตอร์ - ด้วยดัชนี 1
ให้เราสมมติว่าวงจรโรเตอร์เปิดอยู่ก่อนคือ ไม่มีกระแสไฟฟ้าอยู่ในนั้น แรงแม่เหล็กไฟฟ้าไม่กระทำบนโรเตอร์และไม่เคลื่อนที่ ในกรณีนี้ สนามแม่เหล็กของเครื่องเป็นเพียงสนามแม่เหล็กหมุนของสเตเตอร์เท่านั้น
เมื่อมีการต่อสายมอเตอร์แบบสองขั้วสำหรับการทำงานแบบสี่ขั้ว แรงบิดสูงสุดของมอเตอร์เหนี่ยวนำที่ได้จะเป็นเท่าเดิม โดยมีค่าเท่ากับครึ่งของค่าก่อนหน้า หรือสองเท่าของค่าก่อนหน้า ขึ้นอยู่กับวิธีการวางขดลวดของสเตเตอร์ ในรูป 7-41 แสดงการเชื่อมต่อสเตเตอร์ที่เป็นไปได้และผลกระทบต่อกราฟแรงบิด ข้อเสียเปรียบหลักของวิธีแบบขั้วอนุกรมสำหรับการเปลี่ยนความเร็วคือ ความเร็วต้องมีอัตราส่วน 2: วิธีดั้งเดิมในการเอาชนะ ข้อเสียคือการใช้สเตเตอร์สเตเตอร์หลายตัวที่มีจำนวนขั้วต่างกันและเปิดเครื่องเพียงกลุ่มเดียวที่ เวลา.
เมื่อโรเตอร์อยู่กับที่ EMF ที่เหนี่ยวนำในขดลวดจะเท่ากับความถี่ ฉกระแสในวงจรสเตเตอร์ หากโรเตอร์หมุนด้วยความถี่ นตามสนามสเตเตอร์หมุน ความถี่ของ EMF ที่เหนี่ยวนำในขดลวดจะลดลง ความถี่นี้ f2สามารถกำหนดได้จากนิพจน์ n 1 \u003d f 60 / pซึ่งแทนความถี่การหมุนของสนามสเตเตอร์ น 1คุณต้องทดแทนส่วนต่าง n 1 - น, เพราะ สนามแม่เหล็กหมุนของสเตเตอร์ตัดผ่านการหมุนของโรเตอร์ที่คดเคี้ยวเท่านั้นเนื่องจากความถี่ของการหมุน นน้อยกว่าสเตเตอร์ฟิลด์ น 1: f 2 \u003d p (n 1 -n) / 60.
น่าเสียดายที่สเตเตอร์แบบหลายมอเตอร์ทำให้ต้นทุนของมอเตอร์สูงขึ้น และจะใช้เมื่อจำเป็นจริงๆ เท่านั้น การรวมวิธีขั้วที่จับคู่เข้ากับสเตเตอร์ที่คดเคี้ยวหลายอันสามารถสร้างมอเตอร์เหนี่ยวนำสี่ความเร็วได้
ควบคุมความเร็วด้วยการเปลี่ยนความถี่ของสาย ความเร็วของมอเตอร์ซิงโครนัสภายใต้สภาวะปกติเรียกว่าความเร็วพื้นฐาน หากใช้การควบคุมความถี่แบบแปรผัน สามารถควบคุมความเร็วของมอเตอร์ให้สูงหรือต่ำกว่าความเร็วพื้นฐานได้ ตัวควบคุมความถี่ตัวแปรของมอเตอร์เหนี่ยวนำที่ออกแบบมาอย่างเหมาะสมสามารถยืดหยุ่นได้มาก คุณสามารถควบคุมความเร็วของมอเตอร์เหนี่ยวนำจากความเร็วพื้นฐานเพียง 5% เป็นสองเท่าของความเร็วพื้นฐาน อย่างไรก็ตาม สิ่งสำคัญคือต้องรักษาขีดจำกัดบางอย่างเกี่ยวกับแรงดันและแรงบิดของมอเตอร์เมื่อเปลี่ยนความถี่เพื่อให้แน่ใจว่าการทำงานมีความปลอดภัย
หากตอนนี้วงจรโรเตอร์ถูกปิด กระแสที่อยู่ในนั้นจะสร้างระบบหลายเฟสด้วย m2=Nขั้นตอนในกรณีของโรเตอร์กรงกระรอกและกับ m2=3, เช่น. สามเฟสในกรณีของโรเตอร์เฟส ดังนั้นกระแสในขดลวดของโรเตอร์ซึ่งคล้ายกับกระแสในขดลวดสเตเตอร์จะต้องกระตุ้นสนามแม่เหล็กที่หมุนอยู่ RPM นสัมพันธ์กับฟิลด์นี้ที่สัมพันธ์กับโรเตอร์สามารถกำหนดได้โดยใช้นิพจน์ทั่วไปสำหรับความเร็วในการหมุนของสนามแบบหลายขั้ว n 1 \u003d f 60 / p: นเรล = ฉ 2 60/p.
เพราะ ตัวโรเตอร์หมุนไปในทิศทางเดียวกันด้วยความถี่ นจากนั้นสนามของมันจะหมุนในอวกาศด้วยความถี่ นเรล + n \u003d (n 1 - n) + n \u003d n 1, เช่น. สนามโรเตอร์หมุนพร้อมกันกับสนามสเตเตอร์
ดังนั้นสนามการหมุนของสเตเตอร์และโรเตอร์ที่สัมพันธ์กันยังคงนิ่งอยู่ ซึ่งเป็นเงื่อนไขเฉพาะสำหรับการถ่ายโอนพลังงานโดยสมบูรณ์จากสเตเตอร์ไปยังโรเตอร์ สนามแม่เหล็กหมุนของสเตเตอร์และโรเตอร์ทำให้เกิดสนามแม่เหล็กหมุนของมอเตอร์เหนี่ยวนำ การทำงานหมุนเวียนใน as.dv มันทำหน้าที่เป็นตัวเชื่อมเดียวกันระหว่างขดลวดสเตเตอร์และโรเตอร์ เช่นเดียวกับสนามแม่เหล็กไฟฟ้ากระแสสลับในวงจรแม่เหล็กของหม้อแปลงไฟฟ้า ซึ่งจะถ่ายเทพลังงานจากขดลวดปฐมภูมิไปยังขดลวดทุติยภูมิ
ในอนาคตแทนคำว่า สนามแม่เหล็กหมุนทำงานเราจะใช้ตัวย่อ สนามแม่เหล็กหมุน as.dv.
มีโหมดการทำงานของมอเตอร์กระแสสลับหลายโหมด: โหมดปกติ ซึ่งสอดคล้องกับสลิประบุของโรเตอร์ s=sนามที่ พิกัดแรงดันไฟฟ้า คุณ 1 \u003d คุณ 1นามและปัจจุบัน ฉัน 1 = ฉัน 1ชื่อของเครือข่ายอุปทาน โหมดการทำงานซึ่งแรงดันไฟฟ้าใกล้เคียงกับค่าที่ระบุหรือเท่ากับ ยู 1 ≈ยู 1 nom และภาระเครื่องยนต์ถูกกำหนดโดยแรงบิดเบรกบนเพลาเมื่อเลื่อน s≤sนามและปัจจุบัน ฉัน 1 = ฉัน 1ชื่อ; โหมดสตาร์ทเครื่องยนต์ขณะเคลื่อนที่ ซึ่งเกิดขึ้นเมื่อแรงดันไฟหลักเชื่อมต่อและโรเตอร์หยุดนิ่ง s=1.
โหมดการทำงานของสเตเตอร์เฟสทั้งหมดจะเหมือนกัน เช่นเดียวกับเฟสโรเตอร์ ดังนั้นการวิเคราะห์ AS.dv. สามารถทำได้ในหนึ่งเฟสโดยนำเสนอหนึ่งในขดลวดของมันด้วยการหมุนครั้งเดียว