Varikliai šiuo metu nuolatinė srovė rasta platus pritaikymasįvairiose pramonės šakose. Nuolatinės srovės varikliai naudojami ten, kur reikalingas sklandus ir tikslus greičio ir sukimo momento valdymas plačiame diapazone. Šiame straipsnyje kalbėsiu apie nuolatinės srovės variklio valdymo bloko sukūrimą, kuris leistų keisti variklio veleno greitį ir stabilizuoti sukimosi greitį tam tikrame lygyje, nepriklausomai nuo variklio veleno apkrovos.
Kūrimas pagrįstas servo pavaros su vienos kilpos valdymo sistema veikimo principu.
Valdymo bloką sudaro šie mazgai:
– SIFU (impulsų sistema – fazės valdymas)
- Reguliatorius
- Apsauga
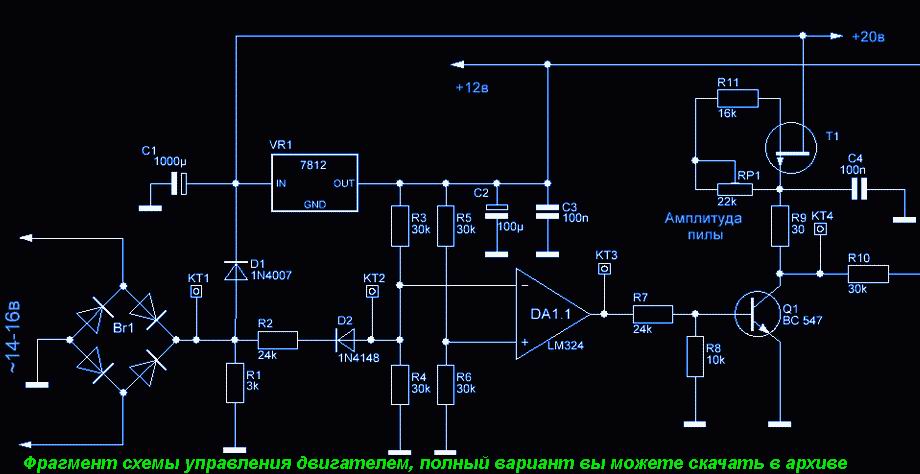
Pavaros schema parodyta žemiau.
Didesnis
Panagrinėkime schemą išsamiau.
Taigi, SIFU (impulsas - fazės valdymo sistema) - paverčia tinklo sinusoidinę įtampą į stačiakampius impulsus, einančius į galios tiristorių valdymo elektrodus. Kai valdymo blokas yra įjungtas kintamoji įtampa 14-16v tiekiama į tiltinį lygintuvą D1, kur jis paverčiamas pulsuojančia įtampa, kuri tarnauja ne tik grandinės maitinimui, bet ir pavaros veikimo sinchronizavimui. Diodas D2 neleidžia išlyginti impulsų kondensatoriumi C1. Tada impulsai tiekiami į „nulio detektorių“ - DA1.1, surinktą ant vieno LM324 mikroschemos operatyvinio stiprintuvo, veikiančio lyginamuoju režimu. Nors impulso nėra, tiesioginės ir atvirkštinės įvesties įtampa yra maždaug vienoda, o lygintuvas yra subalansuotos būsenos. Kai fazė eina per „0“, prie lygintuvo DA1.1 atvirkštinės įvesties, kuri atlieka „nulio detektoriaus“ vaidmenį, atsiranda impulsai, perjungiantys lyginamąjį elementą, dėl ko generuojami stačiakampiai laikrodžio impulsai. DA1.1 išvestis, kurios pasikartojimo laikotarpis yra tvirtai susietas su fazių konvergencija per "0".
Žemiau pateikiamos oscilogramos, paaiškinančios veikimo principą. 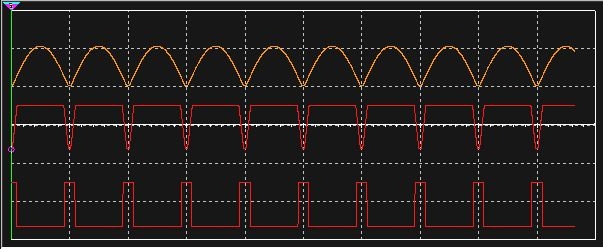
Iš viršaus į apačią: CT1, CT2, CT3.
Grandinė buvo imituota Multisim 11. Čia yra projekto failas. Galite atsisiųsti, paleisti ir pamatyti, kaip veikia šis mazgas.
Toliau laikrodžio impulsai tiekiami į integratorių su tranzistoriaus raktu (C4, Q1), kuriame generuojama pjūklo įtampa. Tuo metu, kai fazė eina per "0", laikrodžio impulsas atidaro tranzistorių Q1, kuris iškrauna kondensatorių C4. Impulsui susilpnėjus, tranzistorius užsidaro, o kondensatorius įkraunamas tol, kol ateina kitas sinchronizavimo impulsas, todėl susidaro kolektorius Q1 (svyruojantis KT4). susidaro tiesiškai didėjanti pjūklo įtampa, stabilizuojama stabilios srovės generatoriumi, pagamintu ant lauko tranzistoriaus T1. "Pjūklo" amplitudė, lygi 9V, nustatoma trimerio rezistorius RP1. „Pjūklo“ įtampa tiekiama į tiesioginį DA1.2 komparatoriaus įvestį.
Etaloninė įtampa tiekiama į komparatoriaus DA1.2 atvirkštinį įėjimą ir tuo momentu, kai pjūklo įtampa viršija įtampos vertę komparatoriaus atvirkštinėje įėjime, komparatorius persijungia ir komparatoriaus išėjime susidaro impulsas ( osciliatorius KT4). Impulsas diferencijuojamas per grandines R14, C6 ir tiekiamas į tranzistoriaus Q2 pagrindą. Atsidaro tranzistorius ir ant impulsinio transformatoriaus Tr1 susidaro galios tiristorių atidarymo impulsai. Didinant (sumažinus) darbo įtampą, kinta KT5 impulsų darbo ciklas.
Čia yra bangos formos. 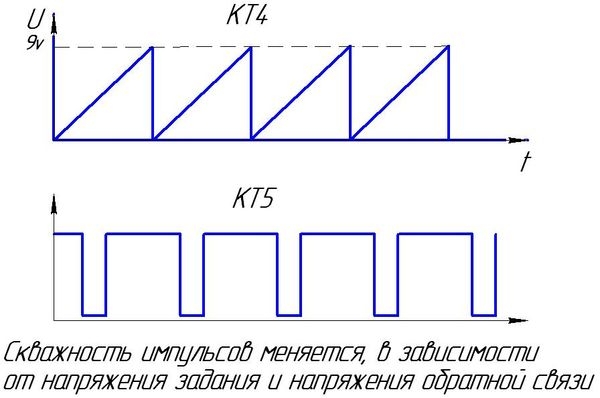
Bet mes nepamatysime jokių impulsų KT5, kol nepaspausime mygtuko "Start" - S1. Kai mygtukas nespaudžiamas, maitinimo įtampa + 12V per normaliai uždarytus kontaktus S1 išilgai grandinės R12, D3 tiekiama į atvirkštinį įėjimą DA1.2 ir yra lygi apie 11V. Kadangi ši įtampa viršija „pjūklo“ įtampą, lygią 9 V, lygintuvas užrakinamas, o tiristorių atidarymo valdymo impulsai nesusidaro. Kad būtų išvengta nelaimingų atsitikimų ir variklio gedimų, jei operatorius nenustatė greičio reguliatoriaus į „0“, grandinėje yra pagreičio blokas C5, R13, kuris naudojamas sklandžiam variklio pagreitinimui. „Start“ režimu grandinė veikia taip: paspaudus mygtuką „Start“, paprastai uždaromi kontaktai atsidaro ir kondensatorius C5 išilgai grandinės - „žemė“, R13, - C5 pradeda sklandžiai krauti ir įtampa. ant neigiamos kondensatoriaus plokštės palaipsniui linksta į nulį. Tuo pačiu metu įtampa invertuojančiame įėjime DA1.2 palaipsniui didėja iki vertės, kurią nustato etaloninė įtampa, o lygintuvas pradeda generuoti galios tiristorių valdymo impulsus. Įkrovimo laikas nustatomas pagal C5, R13 reikšmes. Jei veikiant varikliui reikia keisti jo sūkius, kad būtų išvengta staigių greičio viršijimo, grandinėje yra numatytas „pagreičio-lėtėjimo“ blokas R21, C8, R22. Padidėjus (sumažėjus) etaloninei įtampai, kondensatorius C8 sklandžiai įkraunamas (išsikrauna), o tai neleidžia staigiai „šokti“ įtampai atvirkštinėje stiprintuvo įvestyje ir dėl to neleidžia staigiai padidėti variklio sūkiams.
Dabar pažiūrėkime, kaip tai veikia greičio reguliatorius.
Reguliatorius skirtas palaikyti pastovų variklio sūkių skaičių valdymo zonoje. Reguliatorius yra diferencinis stiprintuvas su dviejų įtampų suma: atskaitos įtampa ir grįžtamojo ryšio įtampa. Etaloninė įtampa nustatoma rezistorius RP1 ir tiekiama per filtrą R20, C8, R21, kuris vienu metu atlieka „pagreičio – lėtėjimo“ bloko funkcijas, tiekiamas į atvirkštinį DA1.3 operatyvinio stiprintuvo valdiklio įvestį. Padidėjus etaloninei įtampai operacinės stiprintuvo DA1.3 išvestyje, išėjimo įtampa tiesiškai mažėja.
Reguliatoriaus išėjimo įtampa tiekiama į SIFU DA1.2 komparatoriaus atvirkštinę įvestį, kur, susumavus pjūklo įtampos impulsus, ji paverčiama stačiakampių impulsų serija, einanti į tiristorių valdymo elektrodus. Didėjant (sumažėjus) etaloninei įtampai, išėjimo įtampa maitinimo bloko išėjime taip pat didėja (sumažėja).
Šis grafikas rodo ryšį tarp variklio sūkių skaičiaus ir atskaitos įtampos. 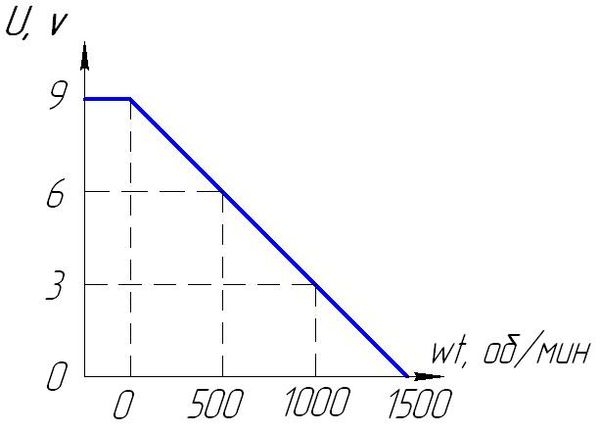
Variklio RPM vertės pateikiamos kaip pavyzdys.
Įtampos daliklis R22, R23, prijungtas prie reguliatoriaus DA1.3 tiesioginio įėjimo, padeda išvengti variklio avarijos, kai nutrūksta grįžtamasis ryšys (nutrūkus grįžtamajam ryšiui, variklis persijungia).
Įjungus pavarą, tachogeneratorius pradeda generuoti įtampą, proporcingą variklio sūkiams. Ši įtampa tiekiama į tikslaus detektoriaus DA1.4, DA2.1 įvestį, surinktą pagal pilnos bangos grandinę. Įtampa, paimta iš tikslaus detektoriaus DA1.4, DA2.1 išėjimo, per filtrą C10, R30, R33 tiekiama į grįžtamojo ryšio mastelio stiprintuvą DA2.2. Stiprintuvas skirtas reguliuoti grįžtamojo ryšio įtampą, gaunamą iš tachogeneratoriaus. Įtampa iš operacinės stiprintuvo DA2.2 išvesties. eina tiek į reguliatoriaus DA1.3 įėjimą, tiek į apsaugos grandinę DA2.3.
Rezistorius RP1 nustato variklio greitį. Kai variklis veikia be apkrovos, mastelio keitimo stiprintuvo išėjimo įtampa yra mažesnė nei operacinės stiprintuvo DA1.3 6 kaiščio įtampa. ≈ +5v, todėl pavara veikia kaip reguliatorius. Padidėjus variklio veleno apkrovai, iš tachogeneratoriaus gaunama įtampa mažėja ir dėl to mažėja įtampa iš mastelio keitimo stiprintuvo išėjimo.
Kai ši įtampa yra mažesnė už DU DA1.3 5 kaiščio įtampą, pavara patenka į srovės stabilizavimo zoną. Sumažinus įtampą neinvertuojamoje op-amp DA1.3 įvestyje, sumažėja jo išėjimo įtampa, o kadangi jis veikia su invertuojančiu stiprintuvu DA1.2, tai lemia didesnį tiristorių atsidarymo kampą. ir, atitinkamai, į variklio armatūros įtampos padidėjimą.
APSAUGOS SCHEMA
Apsauga nuo greičio viršijimo skirta apsaugoti variklį nuo nelaimingo atsitikimo staiga padidėjus nustatytam variklio sūkių dažniui. Grandinė sumontuota ant op-amp DA2.3, prijungta pagal lyginamąją grandinę. Atskaitos įtampa tiekiama į atvirkštinę komparatoriaus įvestį iš daliklio R36, R37, RP3. Rezistorius RP3 nustato apsaugos slenkstį. Įtampa iš mastelio keitimo stiprintuvo DA2.2 išėjimo tiekiama į tiesioginį apsaugos komparatoriaus DA2.3 įėjimą. Kai variklio sūkių skaičius viršija vardinį, įtampa ties lygintuvo tiesiogine įvestimi viršija RP3 nustatytos apsaugos nustatymo slenkstį – komparatorius persijungia. Dėl to, kad grandinėje yra teigiamų atsiliepimų, R38 sukelia komparatoriaus „užtrūkimą“, o VD12 diodas neleidžia lyginamajam nustatyti iš naujo. Įjungus apsaugą, įtampa iš apsaugos komparatoriaus išėjimo (≈ +11v) per VD14 diodą tiekiama į atvirkštinę SIFU įvestį 13 DA1.2, o kadangi apsaugos įtampa viršija „pjūklo“ įtampą ( = 9v), iš karto uždraudžiama leisti valdymo impulsus į valdymo tiristoriaus elektrodus. Apsaugos lygintuvo DA2.3 išėjimo įtampa atidaro tranzistorių VT4, dėl kurio veikia relė P1.1 ir užsidega VL1 šviesos diodas, signalizuojantis apie avarinę situaciją. Apsaugą galite pašalinti tik visiškai išjungę pavarą ir po 5–10 sekundžių pauzės vėl įjungę.
Valdymo bloko maitinimo dalis.
Galios skyriaus schema parodyta žemiau. 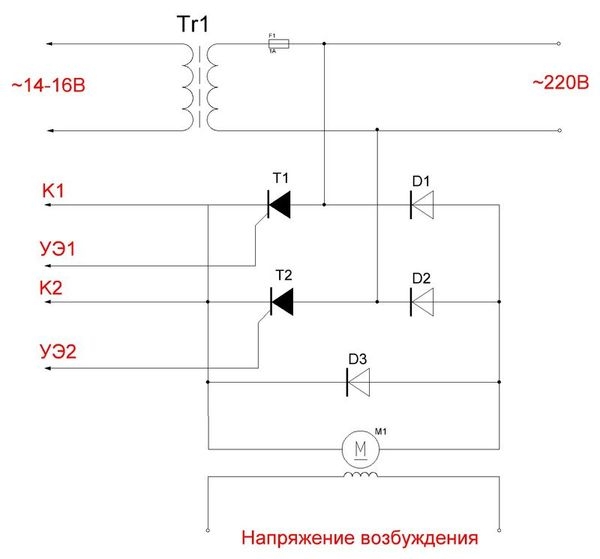
Transformatorius Tr1 skirtas maitinti valdymo bloko grandinę. Valdomas lygintuvas surenkamas pagal pusiau tilto simetrinę grandinę ir turi du galios diodus D1, D2
ir du galios tiristoriai T1, T2 ir apsauginis diodas D3. Sužadinimo apvija maitinama savo jėgomis atskiras transformatorius ir lygintuvas.
Jei variklyje nėra tachogeneratoriaus, grįžtamasis ryšys greičio valdymui gali būti atliekamas taip:
1. Naudokite srovės transformatorių, įtrauktą į valdomo lygintuvo maitinimo grandinę 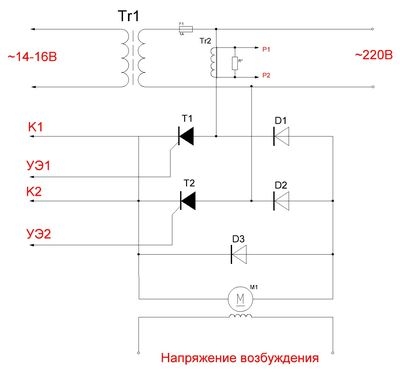
Jei naudojamas srovės transformatorius, valdymo bloko grandinėje uždėkite trumpiklį P1
į 1-3 padėtį, tai būtina, nes didėjant apkrovai didės armatūros srovė, todėl padidės ir iš srovės transformatoriaus pašalinama įtampa, todėl grįžtamoji įtampa turi būti taikoma invertuojančiam
išvesties lustas DA1.3. Taip pat galite įdėti standartinį srovės šuntą, bet tik į variklio armatūros grandinę, po lygintuvo ir pašalinti iš jo grįžtamąjį signalą.
2. Naudokite armatūros įtampos jutiklį. Diagrama parodyta žemiau. 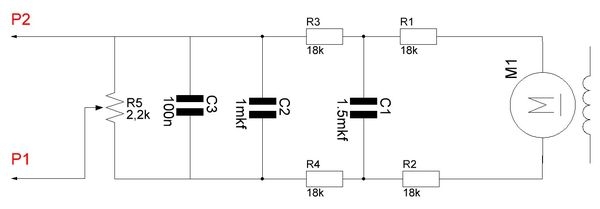
Armatūros įtampos jutiklis yra filtras-daliklis ir yra tiesiogiai prijungtas prie variklio armatūros gnybtų. Diskas sukonfigūruotas taip. Rezistoriai „Reference“ ir „Scaling Uoc“ nustatyti į vidurinę padėtį. Armatūros įtampos jutiklio rezistorius R5 nukreipiamas į apatinę padėtį į „žemę“. Įjungiame pavarą ir nustatome įtampą prie variklio armatūros iki maždaug 110 voltų. Valdydami įtampą prie variklio armatūros, pradedame sukti rezistorių R5. Tam tikru reguliavimo momentu armatūros įtampa pradės mažėti, o tai rodo, kad grįžtamasis ryšys pradėjo veikti.
Dabar pereikime prie valdymo bloko konstrukcijos ir reguliavimo.
Valdymo blokas buvo pagamintas ant spausdintinės plokštės (PCB failas) 
Plokštė MGTF laidu jungiama prie jungties, kad būtų lengva išmontuoti remonto metu.
Nustatymas
Derinimo metu maitinimo dalis buvo surenkama paviršiniu montavimu, o kaip apkrova buvo naudojama įprastinė kaitrinė lempa. 
Reguliavimą pradedame tikrindami maitinimo įtampas ir maitinimo įtampą operaciniuose stiprintuvuose DA1, DA2. Pageidautina mikroschemas dėti į lizdus. Tada mes valdome oscilogramas valdymo taškuose CT1, CT2, CT3 (oscilogramos šiuose taškuose pateiktos SIFU aprašymo pradžioje). Dabar mes pastatome osciloskopą į valdymo tašką KT4. Turėtų būti pjūklinių impulsų, kaip aukščiau esančioje oscilogramoje (mygtukas "Pradėti" turi būti atidarytas šiuo metu). Naudojant žoliapjovės rezistorių RP1, reikia nustatyti „pjūklo“ svyravimą iki 9 voltų, tai yra labai svarbus dalykas, nes nuo to priklauso tolesnis grandinės veikimas. Kadangi lauko tranzistorių parametrų sklaida gali būti labai reikšminga, gali būti, kad RP1 reguliavimo diapazono gali nepakakti, tada pasirenkant rezistoriaus R10 reikšmę norimam diapazonui pasiekti. Valdymo taške KT3 impulso trukmė turi būti 1,5 - 1,8 ms, jei ne, tada pasirenkant rezistorių R4 (mažėjimo kryptimi), kad būtų pasiekta reikiama trukmė.
Sukdami RR1 reguliatorių valdymo taške KT5, valdykite impulsų darbo ciklo pasikeitimą nuo maksimalaus iki visiško jų išnykimo apatinėje RR1 slankiklio padėtyje. Tokiu atveju turėtų pasikeisti prie maitinimo bloko prijungtos lemputės ryškumas.
Tada valdymo bloką prijungiame prie variklio ir tachogeneratoriaus. Nustatome reguliatorių RR1
armatūros įtampa yra apie 40-50 voltų. Rezistorius RP3 turi būti nustatytas į vidurinę padėtį. Valdydami įtampą prie variklio armatūros, mes pradedame sukti rezistorių RP3. Tam tikru reguliavimo momentu armatūros įtampa pradės mažėti, o tai rodo, kad grįžtamasis ryšys pradėjo veikti. Tiems, kurie nori eksperimentuoti: norėdami padidinti pavaros standumą, taip pat galite padidinti pasipriešinimą R24, taip padidindami reguliatoriaus stiprinimą, arba padidinti rezistorių R32.
Jei naudojamas variklio inkaro srovės grįžtamasis ryšys.
Tam, kaip minėta aukščiau, į maitinimo grandinę įtrauktas srovės transformatorius.
valdomas lygintuvas. Srovės transformatoriaus kalibravimo grandinė pateikta žemiau. Pasirinkę rezistorių, transformatoriaus išėjime gaukite kintamąją įtampą ≈ 2 ÷ 2,5 V. Apkrovos galia RN1 turi atitikti variklio galią. 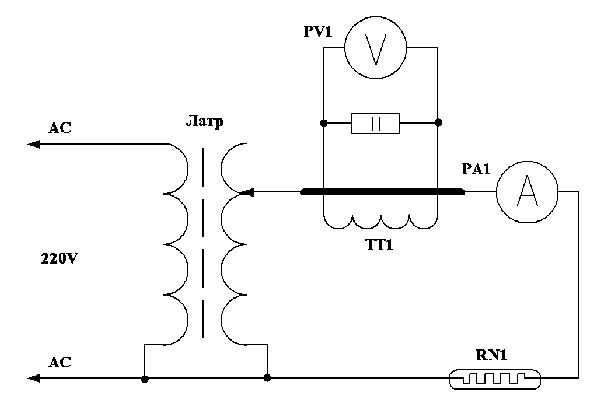
Dėmesio! Neįjunkite srovės transformatoriaus be apkrovos rezistoriaus.
Srovės transformatorių prijungiame prie grįžtamojo ryšio grandinės P1 ir P2. „Reguliatoriaus“ nustatymo metu pageidautina išlituoti diodą D12, kad būtų išvengta klaidingo apsaugos veikimo.
Oscilogramos valdymo taškuose KT8, KT9, KT10 turi būti tokios, kaip parodyta paveikslėlyje žemiau. 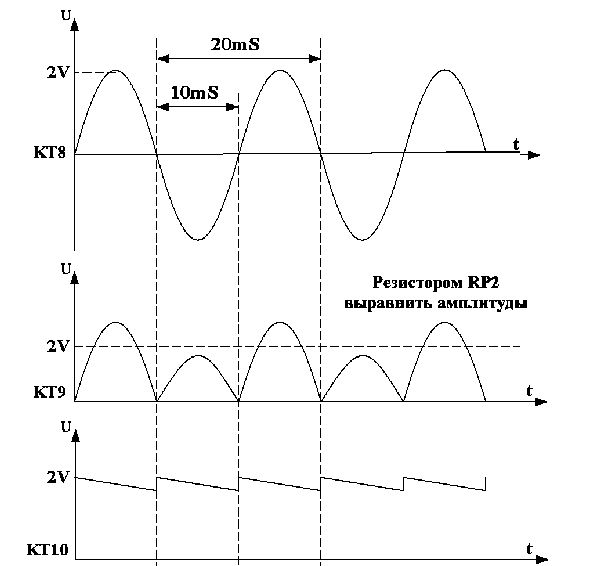
Kiti nustatymai yra tokie patys, kaip ir naudojant tachogeneratorių.
Jei naudojamas variklio armatūros įtampos grįžtamasis ryšys.
Kaip pažymėta aukščiau, galima pritaikyti armatūros įtampos grįžtamąjį ryšį, tam surenkamas armatūros įtampos jutiklis. Valdymo blokas sukonfigūruotas taip. Rezistoriai „Reference“ ir „Scaling Uoc“ nustatyti į vidurinę padėtį. Armatūros įtampos jutiklio rezistorius R5 nukreipiamas į apatinę padėtį į „žemę“. Įjungiame pavarą ir nustatome įtampą prie variklio armatūros iki maždaug 110 voltų. Valdydami įtampą prie variklio armatūros, pradedame sukti rezistorių R5. Tam tikru reguliavimo momentu armatūros įtampa pradės mažėti, o tai rodo, kad grįžtamasis ryšys pradėjo veikti.
Šis valdymo blokas buvo skirtas gręžimo mašinai. Štai šio monstro nuotrauka 
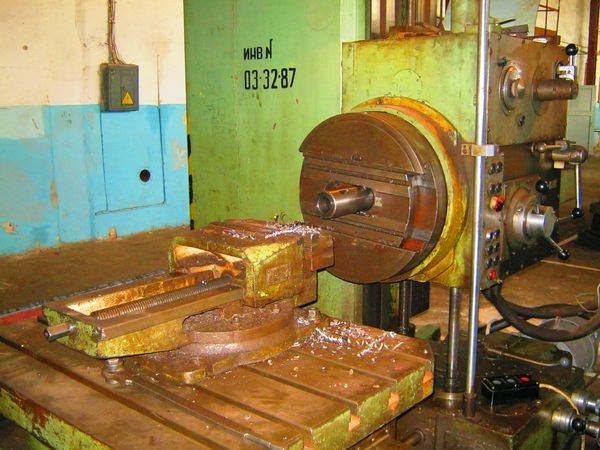
Šioje mašinoje sugedo elektros mašinos stiprintuvas, kuris valdė nuolatinės srovės variklį stalui perkelti.
Čia yra galios stiprintuvas. 
Vietoj to buvo pagamintas šis valdymo blokas.
Čia yra paties nuolatinės srovės variklio nuotrauka. 
Valdymo blokas buvo surinktas ant izoliuojančio pagrindo, kuriame yra visi pagrindiniai elementai. 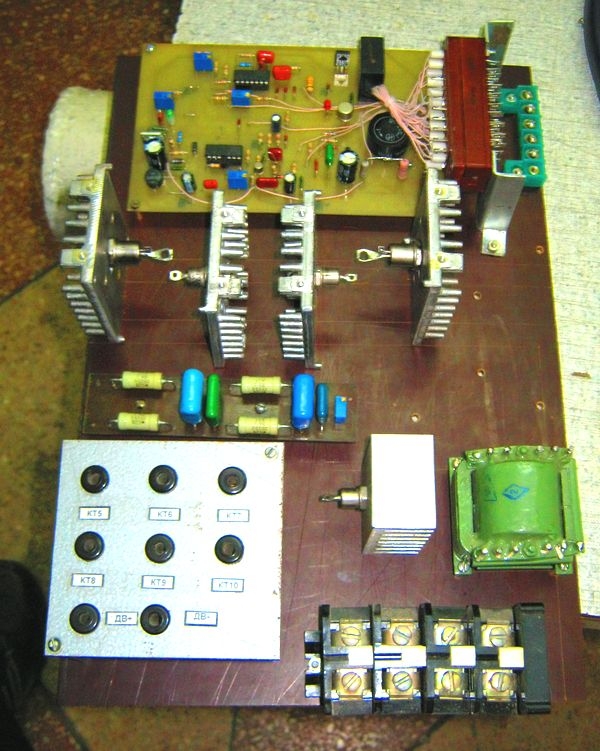
Maitinimo diodai ir tiristoriai montuojami ant šilumos kriauklių. Taip pat buvo pagamintas skydelis su jungtimis, kur buvo išvesti signalai iš grandinės valdymo taškų. Tai buvo padaryta siekiant patogiau nustatyti ir taisyti tiesiai ant mašinos.
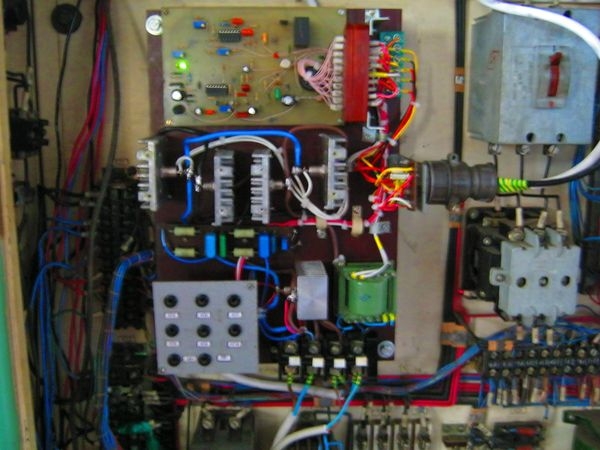
Čia yra sumontuotas valdymo blokas mašinos maitinimo spintoje 
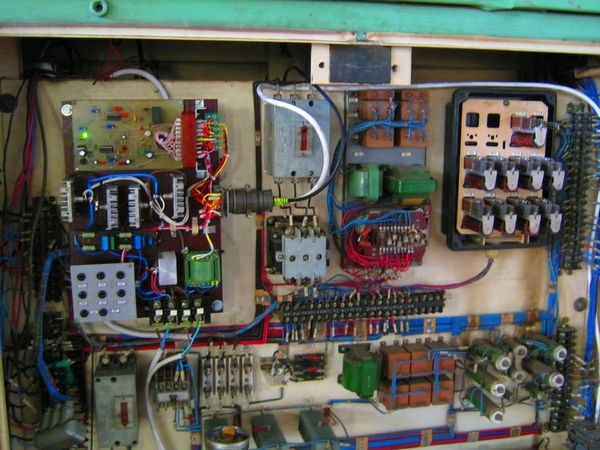
Kitoje maitinimo spintos pusėje buvo sumontuotas nedidelis valdymo pultas. 
Ant jo yra:
- perjungimo jungiklis įrenginiui įjungti
- darbo režimo perjungimo jungiklis. Kadangi mašinos stalo reguliavimo judesiams nereikia tikslaus apsisukimų valdymo ir stabilizavimo, šiuo metu grįžtamojo ryšio grandinė yra šuntuojama.
- apsisukimų skaičiaus reguliavimo rankenėlės. Buvo tiekiami du kintamieji rezistoriai, vienas skirtas stambiam reguliavimui, antrasis - kelių apsisukimų - skirtas tiksliai nustatyti reikalingus apsisukimus grubiam ir smulkiam detalės gręžimui.
Tiems, kurie domisi, žemiau yra vaizdo įrašas apie veikiančią mašiną. Pirma, parodytas skylės išgręžimas 20 mm storio plieninėje plokštėje. Tada parodoma, kokiu dažniu sukasi mašinos stalo padavimo varžtas. Tokiu greičiu detalė tiekiama į frezą, o tokį padavimo sraigto greitį užtikrina nuolatinės srovės variklis, kuriam, tiesą sakant, visa tai ir buvo padaryta.
Valdymo blokas veikė gerai, gedimų ar avarijų nebuvo.
Volodymyras Rentyukas, Zaporožė, Ukraina
Straipsnyje pateikiama trumpa apžvalga ir populiarių grandinių, skirtų nuolatinės srovės kolektorių varikliams valdyti, bei originalių ir mažai žinomų grandinių sprendimų analizė
Elektros varikliai yra bene vienas populiariausių elektrotechnikos gaminių. Kaip mums sako visažinė Vikipedija, Elektros variklis - elektrinė mašina(elektromechaninis keitiklis), kuriame Elektros energija paverčiamas mechaniniu. Jo istorijos pradžia galima laikyti atradimą, kurį Michaelas Faradėjus padarė dar 1821 m., nustatęs laidininko sukimosi magnetiniame lauke galimybę. Tačiau pirmasis daugiau ar mažiau praktiškas elektros variklis su besisukančiu rotoriumi savo išradimo laukė iki 1834 m. Jį išrado Moritzas Hermannas von Jacobi, mums geriau žinomas kaip Borisas Semenovičius, dirbdamas Karaliaučiuje. Elektros varikliai pasižymi dviem pagrindiniais parametrais – veleno (rotoriaus) sukimosi greičiu ir velenu išvystytu sukimo momentu. Apskritai abu šie parametrai priklauso nuo į variklį tiekiamos įtampos ir srovės jo apvijose. Šiuo metu yra gana daug įvairių elektros variklių, o kadangi, kaip pažymėjo mūsų garsusis literatūrinis veikėjas Kozma Prutkovas, beribis dalykas negali būti aprėptas, toliau aptarsime nuolatinės srovės variklių valdymo ypatybes (toliau – kaip). elektros varikliai).
Yra dviejų tipų nuolatinės srovės varikliai - tai mums žinomi varikliai su kolektoriais ir bešepetiniai (žingsniniai) varikliai. Pirmajame kintamasis magnetinis laukas, užtikrinantis variklio veleno sukimąsi, formuojamas rotoriaus apvijomis, kurios maitinamos per šepetinį komutatorių – kolektorių. Jis sąveikauja su pastoviu statoriaus magnetiniu lauku, sukdamas rotorių. Tokiems varikliams veikti nereikia išorinių jungiklių, jų vaidmenį atlieka kolektorius. Statorius gali būti pagamintas tiek iš nuolatinių magnetų sistemos, tiek iš elektromagnetų. Antrojo tipo elektros varikliuose apvijos sudaro fiksuotą variklio dalį (statorių), o rotorius yra pagamintas iš nuolatinių magnetų. Čia perjungiant statoriaus apvijas sukuriamas kintamasis magnetinis laukas, kurį atlieka išorinė valdymo grandinė. Žingsniniai varikliai (anglų kalba "stepper motor") yra daug brangesni nei kolektoriniai varikliai. Tai gana sudėtingi įrenginiai, turintys savo specifines savybes. Visas jų aprašymas reikalauja atskiro leidinio ir nepatenka į šio straipsnio taikymo sritį. Norėdami gauti daugiau informacijos apie šio tipo variklius ir jų valdymo schemas, galite kreiptis, pavyzdžiui, į.
Kolektorių varikliai (1 pav.) yra pigesni ir jiems paprastai nereikia sudėtingų valdymo sistemų. Jų veikimui pakanka tiekti maitinimo įtampą (ištaisyta, pastovi!). Problemos pradeda kilti, kai reikia reguliuoti tokio variklio veleno sukimosi greitį arba specialiu sukimo momento valdymo režimu. Yra trys pagrindiniai tokių variklių trūkumai - tai mažas sukimo momentas esant mažam sukimosi greičiui (todėl dažnai reikalinga pavarų dėžė, o tai atsispindi visos konstrukcijos sąnaudoje), generavimas aukštas lygis elektromagnetiniai ir radijo trukdžiai (dėl slenkančio kontakto kolektoriuje) ir mažas patikimumas (tiksliau, mažas resursas; priežastis yra tame pačiame kolektoriuje). Naudojant kolektorinius variklius, reikia atsižvelgti į tai, kad srovės suvartojimas ir jų rotoriaus sukimosi greitis priklauso nuo veleno apkrovos. Šepetys varikliai yra universalesni ir plačiau naudojami, ypač pigiuose įrenginiuose, kur kaina yra lemiamas veiksnys.
Kadangi kolektoriaus variklio rotoriaus sukimosi greitis visų pirma priklauso nuo į variklį tiekiamos įtampos, natūralu jo valdymui naudoti grandines, kurios turi galimybę nustatyti arba reguliuoti išėjimo įtampą. Tokie sprendimai, kuriuos galima rasti internete, yra schemos, pagrįstos reguliuojami stabilizatoriaiįtampa ir, kadangi diskrečiųjų stabilizatorių amžius jau seniai praėjo, patartina tam naudoti, pavyzdžiui, nebrangius integruotus kompensacinius stabilizatorius. Galimi variantai tokia schema parodyta 2 pav.
Schema primityvi, bet atrodo labai sėkminga ir, svarbiausia, nebrangi. Pažvelkime į tai inžinieriaus požiūriu. Pirma, ar galima apriboti variklio sukimo momentą ar srovę? Tai išspręsta įrengiant papildomą rezistorių. 2 paveiksle jis pažymėtas R LIM . Jo apskaičiavimas pateiktas specifikacijoje, tačiau tai pablogina grandinės, kaip įtampos reguliatoriaus, veikimą (daugiau apie tai žemiau). Antra, kuris iš greičio reguliavimo variantų yra geresnis? 2a paveiksle pateikta parinktis suteikia patogią linijinio valdymo charakteristiką, todėl ji yra populiaresnė. 2b paveiksle pateikta parinktis turi nelinijinį atsaką. Bet pirmuoju atveju, jei kintamo rezistoriaus kontaktas sugenda, gauname didžiausias greitis, o antroje – minimumas. Kurį pasirinkti, priklauso nuo konkrečios programos. Dabar apsvarstykite vieną variklio su tipiniais parametrais pavyzdį: darbinė įtampa 12 V; maksimali darbinė srovė 1 A. LM317 IC, priklausomai nuo priesagų, turi maksimalią išėjimo srovę nuo 0,5 A iki 1,5 A (žr. specifikaciją; yra panašių IC su didesne srove) ir pažangia apsauga (nuo perkrovos ir perkaitimo). Šiuo požiūriu tai puikiai atitinka mūsų užduotį. Problemos, kaip visada, slypi detalėse. Jei variklis įjungtas iki maksimalios galios, kuri yra labai realu mūsų pritaikymui, tada IC, net esant minimaliam leistinam skirtumui tarp įėjimo įtampos V IN ir išėjimo V OUT lygiu 3 V, galia bus išsklaidyta bent
P = (V IN - V OUT) × I = 3 × 1 = 3 vatai.
Todėl reikalingas radiatorius. Vėl kyla klausimas – kokiam galios išsklaidymui? 3 vatais? O čia jo nėra. Jei nesate pernelyg tingus ir apskaičiuojate IC apkrovos grafiką priklausomai nuo išėjimo įtampos (tai lengva padaryti "Excel"), tada gauname, kad mūsų sąlygomis didžiausia IC galia bus išsklaidyta ne esant maksimaliai išėjimo įtampai. reguliatoriaus, bet esant 7,5 V išėjimo įtampai (žr. 3 pav.), ir ji bus beveik 5,0 W!
Kaip matote, pasirodo, kažkas nebepigu, o labai griozdiška. Taigi šis metodas tinka tik mažos galios varikliams, kurių darbinė srovė ne didesnė kaip 0,25 A. Šiuo atveju reguliavimo IC galia bus 1,2 W, o tai jau bus priimtina.
Išeitis – valdymui naudoti impulsų pločio moduliacijos (PWM) metodą. Tai tikrai labiausiai paplitęs. Jo esmė yra vienpolių stačiakampių impulsų, kurių trukmė moduliuojama, tiekimas varikliui. Pagal signalų teoriją, tokios sekos struktūroje yra pastovi dedamoji, proporcinga santykiui τ/T, kur: τ – impulso trukmė, o T – sekos periodas. Būtent ji kontroliuoja variklio greitį, o tai išskiria ją kaip šios sistemos integratorių. Kadangi PWM pagrindu veikiančio reguliatoriaus išėjimo pakopa veikia perjungimo režimu, jai paprastai nereikia didelių aušintuvų šilumai išsklaidyti, net esant santykinai dideli pajėgumai variklis, o tokio reguliatoriaus efektyvumas yra nepalyginamai didesnis nei ankstesnio. Kai kuriais atvejais galite naudoti buck arba boost DC / DC keitiklius, tačiau jie turi daugybę apribojimų, pavyzdžiui, dėl išėjimo įtampos reguliavimo gylio ir minimalios apkrovos. Todėl, kaip taisyklė, kiti sprendimai yra labiau paplitę. Tokio reguliatoriaus „klasikinė“ grandinės konstrukcija parodyta 4 pav. Jis naudojamas kaip droselis (reguliatorius) profesionalaus modelio geležinkelyje.
Pirmajame operaciniame stiprintuve sumontuotas osciliatorius, antrajame – lyginamasis. Kondensatoriaus C1 signalas tiekiamas į komparatoriaus įėjimą, o reguliuojant atsako slenkstį susidaro stačiakampis signalas su norimu santykiu τ/T (5 pav.).
Reguliavimo diapazonas nustatomas apkarpant rezistorius RV1 (greitesnis) ir RV3 (lėčiau), o patį greičio valdymą atlieka rezistorius RV2 (greitis). Atkreipiu skaitytojų dėmesį į tai, kad panaši schema internete sklando rusakalbiuose forumuose su klaidomis skirstytuvo, nustatančio palyginimo slenkstį, reitinguose. Variklis yra tiesiogiai valdomas mygtuku ant galingo tokio tipo lauko tranzistoriaus. Šio MOSFET tipo tranzistoriaus savybės yra didelė darbinė srovė (30 A DC ir iki 120 A impulsas), itin maža atviro kanalo varža (40 mΩ) ir atitinkamai minimalūs galios nuostoliai atviroje būsenoje.
Į ką pirmiausia reikėtų atkreipti dėmesį naudojant tokias schemas? Pirma, tai yra valdymo grandinės vykdymas. Čia schemoje (4 pav.) yra nedidelis trūkumas. Jei laikui bėgant kils problemų su judančiu kintamo rezistoriaus kontaktu, gausime visišką beveik momentinį variklio pagreitį. Tai gali sugadinti mūsų įrenginį. Kas yra priešnuodis? Įdėkite papildomą pakankamai didelės varžos rezistorių, pavyzdžiui, 300 kΩ nuo IC išėjimo 5 į bendrą laidą. Tokiu atveju, jei reguliatorius sugenda, variklis bus sustabdytas.
Kita tokių reguliatorių problema yra išėjimo pakopa arba variklio tvarkyklė. Tokiose grandinėse jis gali būti atliekamas tiek lauko tranzistoriuose, tiek dvipoliuose; pastarieji nepalyginamai pigesni. Tačiau tiek pirmajame, tiek antrajame variantuose būtina atsižvelgti į kai kuriuos svarbius punktus. Norint valdyti MOSFET tipo lauko efekto tranzistorių, būtina įkrauti ir iškrauti jo įvesties talpą, o tai gali būti tūkstančiai pikofaradų. Jei vartų serijos rezistorius (R6 4 pav.) nenaudojamas arba jo vertė yra per maža, tada santykinai aukšti dažniai valdymas, gali sugesti operacinis stiprintuvas. Jei naudojate didelio nominalo R6, tada tranzistorius ilgiau išliks aktyvioje savo perdavimo charakteristikos zonoje, todėl mes padidinsime nuostolius ir rakto įkaitimą.
Dar viena pastaba apie schemą 4 paveiksle. Papildomo diodo D2 naudojimas neturi prasmės, nes BUZ11 tranzistoriaus struktūra jau turi savo vidinį apsauginį didelės spartos diodą, kurio charakteristikos yra geresnės nei siūloma. Diodas D1 taip pat akivaizdžiai nereikalingas, tranzistorius BUZ11 leidžia tiekti ± 20 V vartų šaltinio įtampą, o valdymo grandinės poliškumo pakeitimas su vienpoliu maitinimu, taip pat esant aukštesnei nei 12 V įtampai, yra neįmanomas.
Jei naudojamas bipolinis tranzistorius, kyla problemų dėl pakankamos bazinės srovės generavimo. Kaip žinote, norint prisotinti bipolinio tranzistoriaus jungiklį, jo bazinė srovė turi būti ne mažesnė kaip 0,06 apkrovos srovės. Aišku, kad operacinis stiprintuvas gali neteikti tokios srovės. Šiuo tikslu panašiame, iš tikrųjų, reguliatoriuje, kuris naudojamas, pavyzdžiui, populiariame įmonės mini graviruotoje PT-5201, naudojamas tranzistorius, kuris yra Darlington grandinė. Čia yra įdomus momentas. Šie mini graviratoriai kartais sugenda, bet ne dėl tranzistoriaus perkaitimo, kaip galima manyti, o dėl IC perkaitimo (maksimali darbinė temperatūra +70 ° C) išėjimo tranzistoriaus (maksimali leistina temperatūra +150 ° C) . Straipsnio autoriaus naudojamuose gaminiuose jis buvo prispaustas prie IC korpuso ir užteptas klijais, kurie neleistinai įkaitino IC ir vos neužblokavo aušintuvo. Jei susidursite su tokiu našumu, geriau „atkimšti“ tranzistorių nuo IC ir kiek įmanoma sulenkti. Už šias žinias straipsnio autorius buvo apdovanotas „Pro'sKit“ įrankių rinkiniu. Kaip matote, viską reikia išspręsti kaip visumą - žiūrėkite ne tik į grandinę, bet ir atkreipkite dėmesį į viso reguliatoriaus konstrukciją.
Yra keletas įdomesnių schemų paprastesniems PWM valdikliams. Pavyzdžiui, dvi grandinės, pagrįstos vienu tvarkyklės operaciniu stiprintuvu, paskelbtos [
Kai reikalingas sklandus ir tikslus elektros variklio greičio ir sukimo momento valdymas plačiame diapazone, reikalinga nuolatinės srovės variklio valdymo grandinė.
SIFU – impulsų fazių valdymo sistema atlieka sinusoidinę tinklo įtampos transformaciją į stačiakampių impulsų seką pagal galios tiristorių valdymo išėjimus. Įjungus grandinę, kintamoji įtampa, kurios vardinė vertė yra 14–16 voltų, patenka į tilto lygintuvą ir paverčiama pulsuojančia, kuri ne tik maitina konstrukciją, bet ir sinchronizuoja įrenginio veikimą. . Diodas D2 neišlygina talpos impulsų C1. Tada impulsai seka „nulio detektorių“, pagamintą ant operacinio stiprintuvo LM324 elemento DA1.1, įtraukto į lyginamąjį režimą. Nors impulsų nėra, tiesioginės ir atvirkštinės operacinės stiprintuvo įvesties įtampa yra maždaug vienoda, o lygintuvas subalansuotas.
Kai sinusoidas eina per nulinį tašką, atvirkštinėje komparatoriaus įėjime atsiranda impulsai, perjungiantys komparatorių, dėl to DA1.1 išvestyje generuojami stačiakampiai laikrodžio impulsai, kurių pasikartojimo periodas priklauso nuo nulio. tašką. Pažiūrėkite į bangų formas, kad suprastumėte, kaip tai veikia. Iš viršaus į apačią: CT1, CT2, CT3.
Programoje buvo sumodeliuota nuolatinės srovės variklio valdymo grandinė. Archyve su visa nagrinėjamos konstrukcijos versija yra šios programos projekto failas. Galite jį atidaryti ir vizualiai pamatyti, kaip veikia šis mazgas, ir atitinkamai padaryti galutines išvadas apie nuolatinės srovės variklio valdymą, prieš pradėdami naminio radijo mėgėjų gaminio surinkimą.
Grįžkime prie darbo – laikrodžio impulsai seka integratorių su tranzistoriaus raktu (C4, Q1), kuriame generuojama pjūklo įtampa. Tuo metu, kai fazė eina per nulinį tašką, sinchronizavimo impulsas atrakina pirmąjį tranzistorių, kuris iškrauna talpą C4. Impulsui sumažėjus, tranzistorius užrakinamas, o talpa įkraunama, kol ateina kitas sinchronizavimo impulsas, dėl ko tranzistoriaus kolektoriaus (KT4 oscilograma) susidaro tiesiškai didėjanti pjūklo įtampa, stabilizuojama stabilios srovės generatoriumi ant vienpolis tranzistorius T1.
Maždaug 9 voltų pjūklo įtampos amplitudė nustatoma derinimo rezistorius RP1. Ši įtampa tiekiama į tiesioginį komparatoriaus DA1.2 įvestį. Atskaitos įtampa seka komparatoriaus DA1.2 atvirkštinę įvestį ir tuo momentu, kai pjūklo įtampos amplitudė viršija įtampą atvirkštiniame įėjime, lygintuvas perjungiamas į priešingą būseną ir jo išėjime generuojamas impulsas (oscilograma). KT4).
Impulsas diferencijuojamas per pasyviųjų radijo komponentų grandinę R14, C6 ir eina iki antrojo pagrindo. bipolinis tranzistorius, kuris dėl to atsidaro ir ant impulsinio transformatoriaus susidaro galios tiristorių atidarymo impulsai. Padidindami arba sumažindami atskaitos įtampą, galite reguliuoti KT5 impulsų darbo ciklą.
Tačiau KT5 oscilogramoje nematysime jokių impulsų, kol nepaspaussime perjungimo jungiklio S1. Kai jis nėra paspaustas, maitinimo įtampa + 12 V per priekinius kontaktus S1 - R12, D3 seka atvirkštinį įėjimą DA1.2. Kadangi ši įtampa yra didesnė už "pjūklo" įtampą, komparatorius užsidaro, o atidarymo tiristoriaus impulsai nėra generuojami.
Kad būtų išvengta avarinių situacijų ir elektros variklio gedimo, jei greičio reguliatorius nenustatytas į „0“, grandinė turi pagreičio bloką ant elementų C5, R13, skirtą sklandžiam variklio pagreitėjimui.
Paspaudus perjungimo jungiklį S1, kontaktai atsidaro ir talpa C5 pradeda sklandžiai krautis, o neigiamos kondensatoriaus plokštės įtampa artėja prie nulio. Įtampa invertuojančiame įėjime DA1.2 padidėja iki etaloninės įtampos vertės, o komparatorius pradeda generuoti impulsus, kad atidarytų galios tiristorius. Įkrovimo laiką lemia radijo komponentai C5, R13.
Jei veikiant varikliui reikia reguliuoti jo sūkius, į grandinę pridedamas pagreičio ir lėtėjimo blokas R21, C8, R22. Padidėjus arba sumažėjus etaloninei įtampai, talpa C8 sklandžiai įkraunama arba iškraunama, o tai pašalina staigų įtampos „šokį“ atvirkštinėje įvestyje ir dėl to pašalina staigų variklio sūkių skaičiaus padidėjimą.
Reguliatorius naudojamas palaikyti pastovų greitį valdymo zonoje. Reguliatorius pagamintas remiantis diferencialiniu stiprintuvu, susumavus dvi įtampas: atskaitos ir grįžtamojo ryšio. Atskaitos įtampa formuojama varža RP1 ir seka per filtrą ant komponentų R20, C8, R21, kuris atlieka greitėjimo ir lėtėjimo bloko funkcijas, ir patenka į atvirkštinį įėjimą DA1.3. Padidėjus etaloninei įtampai DA1.3 išėjime, išėjimo įtampa tiesiškai mažėja.
Reguliatoriaus išėjimo įtampa seka atvirkštinę SIFU DA1.2 komparatoriaus įvestį, kur, susumavus „pjūklo“ impulsus, ji virsta stačiakampių impulsų serija, einanti tiristorius į elektrodus. Didėjant arba mažėjant etaloninei įtampai, išėjimo įtampa maitinimo bloko išėjime taip pat didėja arba mažėja. Grafike parodyta variklio sūkių skaičiaus priklausomybė nuo etaloninės įtampos.
Įtampos daliklis ant rezistorių R22, R23, prijungtų prie tiesioginio DA1.3 reguliatoriaus įėjimo, yra skirtas pašalinti avarinę situaciją, jei nutrūktų grįžtamasis ryšys.
Įjungus pavarą, tachogeneratorius generuoja įtampą, proporcingą elektros variklio greičiui. Ši įtampa patenka į tikslaus detektoriaus DA1.4, DA2.1 įvestį, pagamintą pagal klasikinę pilnos bangos grandinę. Iš jo išvesties įtampa per pasyviųjų komponentų C10, R30, R33 filtrą patenka į OS mastelio keitimo stiprintuvą DA2.2. Stiprintuvas naudojamas OS įtampai, gaunamai iš tachogeneratoriaus, reguliuoti. Įtampa iš DA2.2 išėjimo patenka į DA1.3 įvestį ir į DA2.3 apsaugos grandinę.
Varža RP1 sukuria elektros variklio sūkius. Kai veikia be apkrovos, mastelio keitimo stiprintuvo išėjimo įtampa yra mažesnė nei DA1.3 šeštojo kaiščio įtampa, todėl pavara veikia kaip reguliatorius.
Padidėjus veleno apkrovai, iš tachogeneratoriaus pašalinama įtampa mažėja ir dėl to mažėja įtampa iš mastelio stiprintuvo išėjimo. Kai šis lygis yra mažesnis nei DA1.3 operacinės stiprintuvo 5 kojelės, pavara pateks į esamą stabilizavimo zoną. Sumažinus įtampą neinvertuojančiame įėjime DA1.3, sumažės jo išėjimo įtampa, o kadangi jis veikia su invertuojančiu stiprintuvu DA1.2, tai padidins tiristorių atsidarymo kampą ir atitinkamai padidins lygį variklio armatūra.
Apsauga nuo greičio viršijimo sumontuota ant operacinio stiprintuvo DA2.3, įtraukto kaip lyginamoji priemonė. Jo apversta įvestis gauna atskaitos įtampą iš skirstytuvo R36, R37, RP3. Atsparumas RP3 reguliuoja apsaugos veikimo lygį. Įtampa iš stiprintuvo DA2.2 išėjimo patenka į tiesioginį įėjimą DA2.3.
Viršijus greitį virš vardinio, tiesioginis lygintuvo įėjimas viršija apsaugos nustatymo slenkstį, kurį nustato varža RP3 ir lyginamieji jungikliai.
Dėl teigiamo grįžtamojo ryšio grandinėje, R38 sukelia lygintuvo „užfiksavimą“, o VD12 diodas neleidžia lyginamajam nustatyti iš naujo. Suveikus apsaugai, lygintuvo išėjimas per VD14 diodą eina į atvirkštinę SIFU įvestį 13 DA1.2, o kadangi apsaugos įtampa viršija „pjūklo“ lygį, valdymo impulsų išvestis į elektrodus galios tiristoriai bus iš karto uždrausti.
Apsaugos komparatoriaus DA2.3 išėjimo įtampa atrakina tranzistorių VT4, kuris įjungia relę P1.1 ir užsidega šviesos diodas, rodantis avariją. Apsaugą bus galima pašalinti, jei diskas bus visiškai išjungtas, o po 5–10 sekundžių pertraukos vėl įjunkite maitinimą.
Valdymo bloko maitinimo dalis parodyta paveikslėlyje žemiau:
Transformatorius Tr1 naudojamas valdymo bloko grandinei maitinti. Lygintuvas surenkamas pagal pusiau tilto grandinę ir apima du galios diodus D1, D2 ir du galios tiristorius T1, T2, taip pat apsauginį diodą D3. Sužadinimo apvija maitinama atskiru transformatoriumi ir lygintuvu. Jei variklyje nėra tachogeneratoriaus, greičio valdymo OS gali būti įdiegta taip:
Jei naudojamas srovės transformatorius, nuolatinės srovės variklio valdymo grandinės trumpiklis P1 turi būti nustatytas į 1-3 padėtį.
Taip pat galite naudoti armatūros įtampos jutiklį:
Armatūros įtampos jutiklis yra filtras-daliklis, tiesiogiai prijungtas prie armatūros gnybtų. Diskas sukonfigūruotas taip. Rezistoriai „Reference“ ir „Scaling Uoc“ pasukami į vidurinę padėtį. Armatūros įtampos jutiklio varža R5 susukta iki minimumo. Įjungiame pavarą ir nustatome armatūros įtampą iki maždaug 110 voltų. Išmatavę armatūros įtampą, pradedame sukti varžą R5. Tam tikru pakeitimo momentu armatūros įtampa pradės kristi, o tai rodo, kad OS veikė.
Spausdintinės plokštės, skirtos nuolatinės srovės varikliui valdyti, brėžinys yra padarytas programoje ir jūs galite lengvai savo rankomis padaryti spausdintinę plokštę naudodami metodą
Pradėkime kurti dizainą patikrindami maitinimo įtampą DA1, DA2 operacinės sistemos stiprintuvuose. Mikroschemas rekomenduojama montuoti į lizdus. Tada tikriname signalų formas valdymo taškuose CT1, CT2, CT3. Taške CT4. turėtume matyti pjūklo impulsus, kai mygtukas atidarytas.
Naudodami žoliapjovės varžą RP1, „pjūklo“ svyravimą nustatėme iki maždaug 9 voltų. Valdymo taške CT3 impulso trukmė apie 1,5 - 1,8ms, jei to nematome, tai sumažinę varžą R4 pasiekiame reikiamą trukmę.
Sukdami RR1 svirtį valdymo taške KT5, valdome impulsų darbo ciklo pokytį nuo maksimalaus iki visiško jų išnykimo esant minimaliam pasipriešinimui RR1. Tokiu atveju turėtų pasikeisti prie maitinimo bloko prijungtos lemputės, kurią prijungėme kaip apkrovą, ryškumas.
Tada mes prijungiame valdymo bloką prie variklio ir tachogeneratoriaus. Nustatykite reguliatoriaus RR1 armatūros įtampą 40-50 voltų. Atsparumas RP3 turi būti vidurinėje padėtyje. Matuodami įtampą prie variklio armatūros, pasukite varžą RP3. Tam tikru derinimo momentu armatūros įtampa pradės kristi, o tai rodo, kad grįžtamasis ryšys suveikė.
Jei naudojamas armatūros srovės grįžtamasis ryšys, reikalingas srovės transformatorius, kuris yra įtrauktas į lygintuvo maitinimo grandinę. Srovės transformatoriaus kalibravimo grandinė aptariama toliau. Pasirinkę varžą, transformatoriaus išėjime gaukite kintamąją 2 ÷ 2,5 V įtampą. Apkrovos galia RN1 turi būti lygi variklio galiai
Atminkite, kad nerekomenduojama įjungti srovės transformatoriaus be apkrovos rezistoriaus.
Srovės transformatorių prijungiame prie OS grandinės P1 ir P2. Reguliavimo metu rekomenduojama išlituoti D12 diodą, kad nebūtų klaidingos apsaugos operacijos. Oscilogramos valdymo taškuose KT8, KT9, KT10 parodytos paveikslėlyje žemiau.
Tolesnis reguliavimas yra toks pat, kaip ir naudojant tachogeneratorių.
Šis nuolatinės srovės variklio valdymo blokas buvo pagamintas rankomis gręžimo mašinai. Žiūrėkite nuotraukas archyve aukščiau esančioje žalioje nuorodoje.
Nuolatinės srovės varikliuose sukimo momentas susidaro reaguojant tarp dviejų magnetinių laukų: vieną lauką nustato stacionari lauko apvija, o kitą – besisukančios armatūros apvijos. Kai kurie nuolatinės srovės varikliai neturi lauko apvijos, o ne didelės nuolatiniai magnetai, išlaikant pastovų magnetinį lauką pastovų bet kokiomis darbo sąlygomis.
Bet kokiu atveju nuolatinės srovės variklio veikimo principas yra tas, kad srovė, einanti per inkarą, sukuria magnetinį lauką, kuris bando susilyginti su stacionariu lauku. Ir taip inkaras sukasi:
Tačiau kolekcininkas(taip vadinamas segmentuotų varinių juostelių rinkinys), nutraukia elektrinį kontaktą su jau „išlygiuota“ apvija ir sužadina kitą apviją (arba, kaip aukščiau pateiktame paprastame pavyzdyje, per daug sužadina tą pačią grandinę priešinga kryptimi), sukurdama kitą nesulygiuotą besitęsiantis magnetinis laukas sukasi inkarą. Elektrinis kontaktas tarp besisukančių komutatoriaus segmentų ir stacionaraus maitinimo šaltinio vyksta per anglinius šepetėlius. Šie šepečiai laikui bėgant susidėvi (kaip ir pats komutatorius), todėl juos reikia periodiškai keisti.
Dauguma pramoninių nuolatinės srovės variklių gaminami su keliomis armatūros apvijomis, o ne tik viena, kaip parodyta supaprastintoje iliustracijoje aukščiau. Didelio (1250 AG) nuolatinės srovės elektros variklio, naudojamo keltui varyti, su apvijomis ir armatūra nuotrauka rodoma čia:
Viename šio variklio šepečio bloke pavaizduoti stambiu planu abu angliniai šepečiai, spyruoklinis laikiklis ir daugybė komutatoriaus strypų, su kuriais šepetys susiliečia, kai sukasi armatūra.

Nuolatinės srovės varikliuose atsiranda šie mechaninių ir elektrinių dydžių ryšiai:
Sukimo momentas:
- Momentas yra tiesiogiai proporcingas jėgai. magnetinis laukas armatūra, kuri, savo ruožtu, yra tiesiogiai proporcinga srovei, einančiai per armatūros apvijas;
- Sukimo momentas taip pat yra tiesiogiai proporcingas pastovaus magnetinio lauko stiprumui, kuris, savo ruožtu, yra tiesiogiai proporcingas srovei, tekančiai per jaudinančią apviją (variklyje be magnetų).
- Greitį riboja EML, kurį generuoja armatūra besisukant pastoviame magnetiniame lauke. Šis EMF yra tiesiogiai proporcingas armatūros sukimosi greičiui, taip pat yra tiesiogiai proporcingas pastovaus magnetinio lauko stiprumui (kuris yra tiesiogiai proporcingas jaudinančios apvijos srovei elektros variklyje be magnetų);
- Todėl greitis yra tiesiogiai proporcingas armatūros įtampai;
- Be to, greitis yra atvirkščiai proporcingas pastovaus magnetinio lauko stiprumui, kuris yra tiesiogiai proporcingas srovei, einančiai per jaudinančias apvijas (variklyje be magnetų).
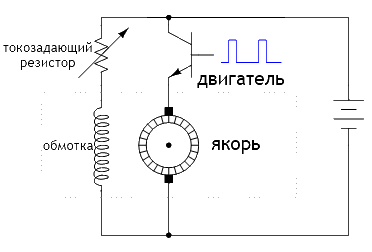
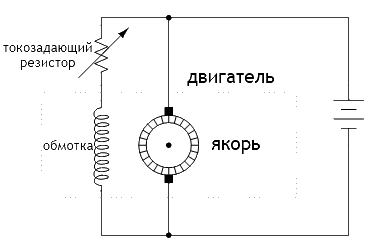
Mažėjanti srovės nustatymo rezistoriaus varža leidžia daugiau srovės tekėti per pavaros apviją, todėl padidėja jos magnetinis laukas. Tai turės du poveikius variklio darbui: pirma, variklis sukurs didesnį sukimo momentą nei anksčiau (esant tokiam pačiam armatūros srovės kiekiui), nes stipresnis armatūros magnetinis laukas veiks armatūrą; antra, variklio greitis sumažės, nes besisukanti armatūra tuo pačiu sukimosi greičiu generuos didelį užpakalinį EML, o šis galinis EMF natūraliai bandys suderinti su taikomą nuolatinės srovės šaltinio įtampą. Kita vertus, galime padidinti nuolatinės srovės variklio greitį (ir sumažinti išėjimo sukimo momentą) padidindami valdymo rezistoriaus varžą, susilpnindami stacionarų magnetinį lauką, kuris suka armatūrą.
Reguliuodami apvijos srovę, galite pakeisti greičio ir sukimo momento pusiausvyrą, tačiau to nepakanka norint valdyti bendrą galia variklis. Norėdami valdyti nuolatinės srovės variklio išėjimo galią, taip pat turime valdyti armatūros įtampą ir srovę. Kintamieji rezistoriai gali būti pritaikytas šiai užduočiai, tačiau šiuo metu šis metodas nenaudojamas, nes dėl to prarandama galia.
Geriausias sprendimas būtų naudoti elektroninę galios valdymo grandinę tranzistorių jungikliai greitai išjungiant ir įjungiant variklio armatūrą grandinėje. Šis valdymo tipas vadinamas impulso pločio moduliacija arba PWM.
(impulso trukmės ir pasikartojimo laikotarpio santykis, atvirkščiai darbo ciklas impulso dydis) nustato varikliui tiekiamos galios proporciją:
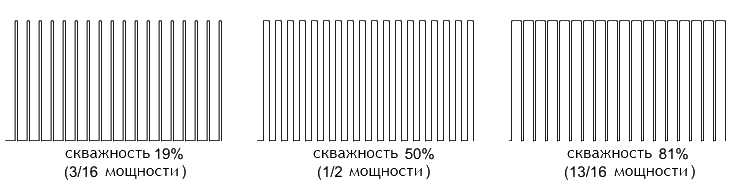
Skaičiuose klaida yra ne „darbo ciklas“, o „darbo koeficientas“
Toks elektroninė grandinė galios valdymas paprastai vadinamas vairuojamas. Taigi kintamo greičio pavara (arba VSD) yra didelės galios grandinė, naudojama nuolatinės srovės variklio greičiui valdyti. Variklio pavaras galima rankiniu būdu nustatyti, kad variklis paleistų tam tikru greičiu, arba gali priimti elektroninius valdymo signalus, kad pakeistų variklio greitį taip pat, kaip elektroniniai signalai valdo judesį. įrengtas nuotolinė sistema perduodant valdymo signalus, pavara veikia kaip ir bet kuris kitas galutinis paleidimo elementas: vykdydamas valdiklio komandas, stabilizuoja tam tikrą technologinį parametrą, .
Tradicinė technologija, skirta perjungimo maitinimo šaltinis Nuolatinės srovės variklio naudojimo grandinė valdomas lygintuvas, kuriame transformuosis kintamoji srovė pastoviuose vietoj įprastų lygintuvų diodų naudojami tiristoriai. Pagrindinis pramoninių nuolatinės srovės variklių maitinimo šaltinis išlieka kintamoji srovė, o ši kintamoji srovė tam tikru sistemos tašku turi būti paversta nuolatine; prasminga valdymą integruoti tiesiai į šį lygintuvo bloką:
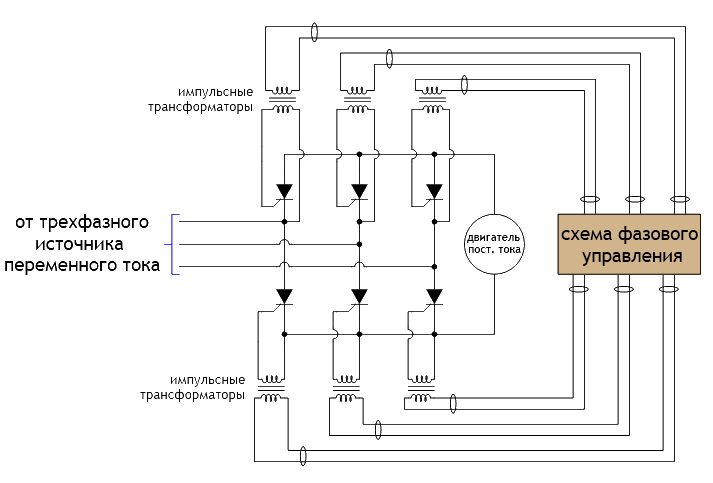
Valdoma lygintuvo grandinė veikia pagal „pradžios“ impulso laiko keitimo kintamosios srovės virpesių impulsų atžvilgiu principą. Kuo anksčiau tiristorius atsidaro kiekvienu kintamosios srovės periodu, tuo ilgiau jis perduoda srovę varikliui. Fazių valdymo grandinė yra atsakinga už impulsų generavimą ir jų trukmę.
Nuolatinės srovės pavara, paprasčiausiai valdanti variklio galią, būtų netinkamai suplanuota ir sunkiai valdoma daugeliui procesų. Idealiu atveju iš kintamo greičio pavaros norėtumėte tikslaus valdymo greitis variklis. Dėl šios priežasties dauguma pavarų yra suprojektuotos taip, kad gautų grįžtamąjį ryšį iš tachometro, mechaniškai prijungto prie variklio veleno. Tachometras paprastai yra mažas generatorius, kuris sukuria pastovus slėgis, tiesiogiai proporcingas veleno sukimosi greičiui (su 0-10 V išėjimu). Pasak jo parodymų, reguliuojama pavara droseliai elektros energija, tiekiamas į variklį, kad sukimosi greitis sutaptų su nurodytu valdymo signalu. Su integruota grįžtamojo ryšio kilpa, skirta greičio reguliavimui, kintamo greičio pavara tampa valdymo sistemos „pasekančiu valdikliu“. Pavara gali priimti greičio atskaitos išvestį iš