บทความนี้กล่าวถึงการใช้งานมอเตอร์ไฟฟ้าแบบซิงโครนัสบางด้าน ซึ่งมีคุณสมบัติที่ยอดเยี่ยมเมื่อหมุนไดรฟ์ทรงพลัง ตัวเองซิงโครนัส รถยนต์ไฟฟ้าสามารถพัฒนากำลังไฟฟ้าได้ถึง 20,000 กิโลวัตต์
มอเตอร์ซิงโครนัสแตกต่างจากมอเตอร์แบบอะซิงโครนัสซึ่งมีกำลังและน้ำหนักบรรทุกที่มากกว่ามาก การเปลี่ยนแปลงของกระแสกระตุ้นช่วยให้คุณสามารถปรับโหลดได้ ไม่เหมือน มอเตอร์เหนี่ยวนำในซิงโครนัสภายใต้แรงกระแทก ความเร็วยังคงที่ ซึ่งช่วยให้สามารถใช้ในกลไกต่างๆ ในอุตสาหกรรมโลหะและโลหะการได้
มอเตอร์ที่มีการทำงานแบบซิงโครนัสสามารถพัฒนากำลังได้ถึง 20,000 กิโลวัตต์ ซึ่งสำคัญมากสำหรับการกระตุ้นแอคทูเอเตอร์ของเครื่องจักรแปรรูปอันทรงพลังในวิศวกรรมเครื่องกลและอุตสาหกรรมอื่นๆ ตัวอย่างเช่น ในกรรไกรกิโยตินประสิทธิภาพสูง ซึ่งโรเตอร์ของมอเตอร์รับแรงกระแทกได้มาก
ใช้มอเตอร์ไฟฟ้าแบบซิงโครนัสเป็นแหล่งกำเนิดได้สำเร็จ พลังงานปฏิกิริยาที่โหลดโหนดเพื่อรักษาระดับแรงดันไฟให้คงที่ ค่อนข้างบ่อยกับเครื่องยนต์ด้วย หลักการซิงโครนัสการกระทำถูกใช้เป็นเครื่องจักรกำลังในการติดตั้งคอมเพรสเซอร์ที่ให้ผลผลิตสูง
เครื่องยนต์ที่ทรงพลังผลิตขึ้นโดยใช้ระบบระบายอากาศซึ่งใบพัดจะติดตั้งอยู่ที่โรเตอร์ มอเตอร์ซิงโครนัสที่ประหยัดและเชื่อถือได้ช่วยให้การทำงานของอุปกรณ์สูบน้ำมีประสิทธิภาพและประหยัด
ลักษณะสำคัญของเครื่องจักรไฟฟ้าแบบซิงโครนัสคือการรักษาความเร็วรอบคงที่ ซึ่งเป็นสิ่งสำคัญสำหรับการหมุนของไดรฟ์ในรูปของปั๊ม คอมเพรสเซอร์ พัดลม และเครื่องกำเนิดไฟฟ้าต่างๆ กระแสสลับ. ก็ยังมีค่าที่จะสามารถควบคุม กระแสปฏิกิริยาเนื่องจากการเปลี่ยนแปลงของกระแสกระตุ้นของขดลวดกระดอง ด้วยเหตุนี้ ดัชนีโคไซน์ φ จึงเพิ่มขึ้นในทุกช่วงการทำงาน ซึ่งจะเพิ่มประสิทธิภาพของมอเตอร์และลดความสูญเสียในเครือข่ายไฟฟ้า
ตัวมอเตอร์เองที่มีหลักการทำงานแบบซิงโครนัสมีความทนทานต่อความผันผวนของแรงดันไฟฟ้าในเครือข่าย และให้ความเร็วในการหมุนคงที่เมื่อเกิดขึ้น มอเตอร์ไฟฟ้าแบบซิงโครนัสเมื่อแรงดันไฟลดลง จะรักษาความสามารถในการโอเวอร์โหลดได้มากกว่าเมื่อเทียบกับมอเตอร์แบบอะซิงโครนัส ความสามารถในการเพิ่มกระแสกระตุ้นระหว่างแรงดันตกคร่อมจะเพิ่มความน่าเชื่อถือของการทำงานในกรณีที่แรงดันไฟฟ้าตกฉุกเฉินในเครือข่ายไฟฟ้า
เครื่องจักรไฟฟ้าแบบซิงโครนัสมีความคุ้มทุนสำหรับกำลังไฟที่สูงกว่า 100 กิโลวัตต์ และส่วนใหญ่จะใช้เพื่อหมุนพัดลมอันทรงพลัง คอมเพรสเซอร์ และโรงไฟฟ้าอื่นๆ เนื่องจากข้อเสียของเครื่องจักรแบบซิงโครนัส เราสามารถสังเกตความซับซ้อนของการออกแบบ การมีอยู่ของการกระตุ้นภายนอกของขดลวดโรเตอร์ ความยากในการสตาร์ท และลักษณะต้นทุนที่ค่อนข้างสูง
หลักการทำงานของมอเตอร์ซิงโครนัสขึ้นอยู่กับปฏิกิริยาของการหมุน สนามแม่เหล็กเกราะที่มีสนามแม่เหล็กของขั้วของตัวเหนี่ยวนำ เกราะมักจะอยู่บนสเตเตอร์และตัวเหนี่ยวนำบนโรเตอร์ที่เคลื่อนที่ได้ ที่ ความจุขนาดใหญ่แม่เหล็กไฟฟ้าทำหน้าที่เป็นขั้ว ในขณะที่กระแสตรงจะถูกส่งไปยังโรเตอร์ผ่านหน้าสัมผัสวงแหวนเลื่อน
มอเตอร์กำลังต่ำใช้แม่เหล็กถาวรที่อยู่บนโรเตอร์ นอกจากนี้ยังมี เครื่องซิงโครนัสด้วยหลักการทำงานย้อนกลับเมื่อวางกระดองไว้บนโรเตอร์และตัวเหนี่ยวนำบนสเตเตอร์ อย่างไรก็ตาม การออกแบบนี้ใช้ในเครื่องยนต์ของแบบเก่า
เครื่องจักรไฟฟ้าแบบซิงโครนัสสามารถทำงานในโหมดเครื่องกำเนิดไฟฟ้า เมื่ออาร์มาเจอร์อยู่บนสเตเตอร์เพื่อให้เลือกไฟฟ้าที่สร้างขึ้นได้ง่าย เครื่องกำเนิดไฟฟ้าทรงพลังที่ทำงานในโรงไฟฟ้าพลังน้ำใช้หลักการนี้
ปัจจุบันไดรฟ์ไฟฟ้าเกือบทั้งหมดเป็นไดรฟ์ที่ไม่มีการควบคุมด้วยมอเตอร์แบบอะซิงโครนัส มีการใช้กันอย่างแพร่หลายในระบบจ่ายความร้อน น้ำประปา ระบบปรับอากาศและระบายอากาศ หน่วยคอมเพรสเซอร์ และพื้นที่อื่นๆ ด้วยการควบคุมความเร็วที่ราบรื่น ในกรณีส่วนใหญ่ คุณสามารถจ่ายโช้ก ตัวแปร กระปุกเกียร์ และอุปกรณ์ควบคุมอื่นๆ ได้ ซึ่งทำให้ระบบกลไกลดความซับซ้อนลงอย่างมาก ลดต้นทุนการดำเนินงานและเพิ่มความน่าเชื่อถือ
การสตาร์ทเครื่องยนต์เมื่อเชื่อมต่อผ่านเครื่องแปลงความถี่จะดำเนินไปอย่างราบรื่นโดยไม่มีการกระแทกและกระแสไฟสตาร์ทซึ่งจะช่วยลดภาระของกลไกและเครื่องยนต์ทำให้ยืดอายุการใช้งานได้ การใช้ไดรฟ์ไฟฟ้าแบบปรับได้ทำให้สามารถประหยัดพลังงานไฟฟ้าได้มากถึงแปดสิบเปอร์เซ็นต์ การประหยัดดังกล่าวเกิดขึ้นได้เนื่องจากการขจัดต้นทุนที่ไม่ก่อผลในอุปกรณ์ควบคุม ในระบบน้ำประปา กฎระเบียบดังกล่าวไม่เพียงแต่ช่วยประหยัดพลังงานไฟฟ้าเท่านั้น แต่ยังรวมถึงน้ำประปา ตลอดจนลดจำนวนอุบัติเหตุอันเนื่องมาจากความเสียหายของท่อส่งน้ำ
ตัวแปลงความถี่ถูกใช้อย่างประสบความสำเร็จมากที่สุดในปั๊มสูบน้ำเพิ่มเติมในระบบจ่ายความร้อนและน้ำ ระบบดังกล่าวมีลักษณะการใช้น้ำไม่สม่ำเสมอขึ้นอยู่กับฤดูกาล วันในสัปดาห์ และช่วงเวลาของวัน ด้วยปริมาณน้ำที่จ่ายอย่างต่อเนื่องในช่วงเวลาของการวิเคราะห์ที่เพิ่มขึ้น ความดันจะลดลงอย่างมาก และเมื่อการไหลในท่อลดลง แรงดันจะเพิ่มขึ้น ซึ่งไม่เพียงแต่นำไปสู่การสูญเสียน้ำ แต่ยังเพิ่มความเสี่ยงของการแตกของท่อด้วย การใช้เครื่องแปลงความถี่ช่วยให้คุณสามารถควบคุมการจ่ายน้ำได้สองวิธี - ตามกำหนดการเฉพาะหรือคำนึงถึง การบริโภคที่แท้จริงน้ำ - ช่วยให้คุณสามารถกำหนดเซ็นเซอร์ความดันหรือมาตรวัดระดับได้ น้ำประปาที่มีการควบคุมช่วยให้คุณลดต้นทุนค่าไฟฟ้าลงครึ่งหนึ่ง ลดการใช้ความร้อนและน้ำลงอย่างมาก
การควบคุมความเร็วการหมุนที่แม่นยำเป็นสิ่งจำเป็นในการผลิตเส้นพลาสติก กระดาษ ลวด ผ้าแก้ว การใช้เครื่องแปลงความถี่ในกระบวนการดังกล่าวทำให้ได้ผลิตภัณฑ์ คุณภาพสูงเพิ่มประสิทธิภาพการทำงาน ขจัดการแตกหัก ในขณะที่วัสดุในระหว่างการม้วนจะมีแรงตึงเท่ากันตลอดความหนาทั้งหมดของม้วน หากกระบวนการทางเทคโนโลยีต้องการการเคลื่อนย้ายสินค้าจาก ความเร็วคงที่, หลาย ตัวแปลงความถี่, เริ่มต้นอย่างราบรื่นและหยุด การเปลี่ยนแปลงความเร็วแบบไม่มีขั้นบันได
วันนี้ขอบเขตของมอเตอร์ไฟฟ้านั้นกว้างขวางมากและหนึ่งในประเภทมอเตอร์ที่ได้รับความนิยมและใช้กันมากที่สุดคือแบบอะซิงโครนัส เครื่องยนต์ไฟฟ้า. แต่มอเตอร์ไฟฟ้าแบบอะซิงโครนัสนั้นแบ่งออกเป็นสองประเภท:
- กับ ขดลวดลัดวงจรโรเตอร์ (โรเตอร์กรงกระรอก), โรเตอร์เฟส;
- มอเตอร์ Schrage-Richter (ขับเคลื่อนจากด้านโรเตอร์)
การประยุกต์ใช้มอเตอร์ไฟฟ้าแบบอะซิงโครนัส
มอเตอร์แบบอะซิงโครนัสสามารถทำงานในสองโหมดการทำงาน: เป็นเครื่องกำเนิดไฟฟ้าและเป็นมอเตอร์ไฟฟ้า นี่แสดงให้เห็นว่าสามารถใช้เป็นแหล่งกำเนิดกระแสไฟฟ้าในแหล่งพลังงานเคลื่อนที่อัตโนมัติได้
การใช้มอเตอร์แบบอะซิงโครนัสเป็นแรงดึงนั้นกว้างขวางกว่าและส่งผลกระทบต่อชีวิตมนุษย์ในหลายด้าน พวกเขาพบว่ามีการนำไปใช้อย่างกว้างขวางใน เครื่องใช้ไฟฟ้าภายในบ้านพลังงานต่ำและ อุปกรณ์เทคโนโลยีวิสาหกิจและการเกษตร
ประเภทของความผิดปกติหลัก การวินิจฉัย และการซ่อมแซมมอเตอร์ไฟฟ้าแบบอะซิงโครนัสที่จำเป็น
แม้ว่า มอเตอร์ไฟฟ้าแบบอะซิงโครนัสมีความน่าเชื่อถือสูงและต้นทุนการผลิตต่ำซึ่งนำไปสู่ความนิยม แต่ก็ล้มเหลว ความผิดปกติบางอย่างของมอเตอร์ไฟฟ้าสามารถวินิจฉัยได้ในอุปกรณ์พิเศษเท่านั้น และต้องมีการซ่อมแซมในโรงงานเพื่อผลิตและซ่อมแซมมอเตอร์ไฟฟ้า อย่างไรก็ตาม มีความผิดปกติบางอย่างที่คุณสามารถวินิจฉัยตัวเองและกำจัดสิ่งที่อาจเกิดขึ้นได้ในสภาพการผลิตของคุณ
หนึ่งในข้อผิดพลาดเหล่านี้คือมอเตอร์ไฟฟ้าไม่รับความเร็วปกติเมื่อสตาร์ทเครื่องหรือไม่หมุน สาเหตุของความผิดปกตินี้อาจเป็นลักษณะทางไฟฟ้าหรือทางกล สาเหตุทางไฟฟ้า ได้แก่ การแตกหักภายในของโรเตอร์หรือขดลวดสเตเตอร์ การเชื่อมต่อที่ขาดในอุปกรณ์สตาร์ท หรือการหยุดชะงักในเครือข่ายอุปทาน หากมีการแตกในขดลวดภายในของมอเตอร์หากเชื่อมต่อตามรูปแบบ "สามเหลี่ยม" คุณต้องเปิดมันก่อน หลังจากนั้นโดยใช้เมกโอห์มมิเตอร์จะกำหนดเฟสที่เกิดการแตกหัก หลังจากตรวจสอบการแตกหักแล้ว ขดลวดของมอเตอร์จะหมุนกลับและประกอบกลับเข้าที่
แรงดันไฟในเครือข่าย หน้าสัมผัสไม่ดีในขดลวดของโรเตอร์ หรือมีความต้านทานสูงในวงจรโรเตอร์ของมอเตอร์โรเตอร์แบบพันแผลทำให้มอเตอร์หมุนที่โหลดเต็มที่ต่ำกว่าความเร็วที่กำหนด ตรวจพบหน้าสัมผัสที่ไม่ถูกต้องในขดลวดโดยใช้แรงดันไฟฟ้า (20 -25% ของค่าปกติ) กับสเตเตอร์ของมอเตอร์ ในเวลาเดียวกัน โรเตอร์ที่ล็อคจะถูกหมุนด้วยตนเอง และตรวจสอบความแรงของกระแสในทุกขั้นตอนของสเตเตอร์ ในโรเตอร์ที่แข็งแรง ความแรงของกระแสไฟฟ้าในทุกตำแหน่งจะเท่ากัน ในกรณีที่หน้าสัมผัสขาดในการบัดกรีของส่วนหน้า แรงดันไฟตกจะถูกบันทึกไว้ ความแตกต่างสูงสุดที่อนุญาตในการอ่านไม่ควรเกิน 10%
การปรับใช้มอเตอร์ไฟฟ้าด้วยวงจรเปิดของเฟสโรเตอร์ สาเหตุของความผิดปกติดังกล่าวเกิดจากการลัดวงจรในขดลวดของโรเตอร์ ความผิดปกตินี้เป็นการตรวจสอบภายนอกอย่างระมัดระวัง เช่นเดียวกับการวัดความต้านทานฉนวนของขดลวดโรเตอร์ ในกรณีที่การตรวจสอบไม่ได้ผล ก็จะกำหนดโดยการพิจารณาความร้อนที่ไม่สม่ำเสมอของขดลวดโรเตอร์ ในกรณีนี้ โรเตอร์จะถูกเบรก และแรงดันไฟที่ลดลงจะถูกนำไปใช้กับสเตเตอร์
ความร้อนสม่ำเสมอของมอเตอร์ไฟฟ้าที่สูงกว่าเกณฑ์ปกติเกิดขึ้นเนื่องจากการโอเวอร์โหลดเป็นเวลานานและการเสื่อมสภาพของระบบทำความเย็น ความผิดปกตินี้นำไปสู่การสึกหรอของฉนวนที่คดเคี้ยวก่อนกำหนด
ความร้อนเฉพาะที่ของขดลวดสเตเตอร์เกิดขึ้นเนื่องจากการลัดวงจรของขดลวดไปยังตัวเรือนใน 2 แห่ง, การเชื่อมต่อขดลวดที่ผิดพลาดในเฟสใด ๆ , การลัดวงจรระหว่าง 2 เฟส หรือการลัดวงจรระหว่างรอบของขดลวดใน ขั้นตอนหนึ่งของขดลวดสเตเตอร์ คุณสามารถวินิจฉัยความผิดปกตินี้ได้โดยการลดความเร็วในการหมุนของมอเตอร์ไฟฟ้า เสียงฮัมที่แรง หรือกลิ่นของฉนวนที่ร้อนจัด การหาค่าขดลวดที่เสียหายทำได้โดยการวัดความต้านทาน (เฟสที่เสียหายมีความต้านทานน้อยกว่า) หรือโดยการวัดความแรงของกระแสไฟเมื่อใช้แรงดันไฟฟ้าต่ำ
เมื่อเชื่อมต่อขดลวดตามรูปแบบ "ดาว" ความแรงของกระแสในเฟสที่เสียหายจะสูงกว่าในส่วนที่เหลือ ในกรณีของการใช้ "สามเหลี่ยม" กระแสไฟในสายไฟที่แข็งแรงจะมีค่าสูงกว่า
การเผาไหม้หรือการหลอมของเหล็กที่เกิดขึ้นเมื่อ ไฟฟ้าลัดวงจรขดลวดของสเตเตอร์, การลัดวงจรของแผ่นเหล็กเนื่องจากการสัมผัสกับสเตเตอร์กับโรเตอร์หรือเนื่องจากการทำลายของฉนวนทำให้เกิดความร้อนในท้องถิ่นของเหล็กแอคทีฟของโรเตอร์ ในกรณีนี้ควันปรากฏขึ้นกลิ่นไหม้ประกายไฟเครื่องยนต์ดังขึ้น ความผิดปกตินี้เกิดขึ้นเนื่องจากการสึกหรอหรือการติดตั้งตลับลูกปืนที่ไม่เหมาะสม การสั่นสะเทือนที่รุนแรง หรือการดึงดูดด้านเดียวของโรเตอร์ไปยังสเตเตอร์ (เปิดกางเกงขาสั้นในขดลวดสเตเตอร์)
มอเตอร์แบบอะซิงโครนัสนั้นหาทดแทนได้ยาก มอเตอร์แบบอะซิงโครนัสถือเป็นพลังงานจากกระแสสลับ ซึ่งการหมุนของโรเตอร์ไม่ตรงกับการหมุนรอบของสนามแม่เหล็กที่เริ่มต้นกระแสในขดลวดสเตเตอร์
คำอธิบายทั่วไป
มีเครื่องอะซิงโครนัสเมื่อเทียบกับเครื่อง กระแสตรงขั้วไม่ได้แสดงอย่างชัดเจน นั่นคือ นี่คือระบบแม่เหล็กขั้วโดยปริยาย แกนสเตเตอร์ทำจากเหล็กแผ่นฉนวนหุ้มฉนวนหนา 0.35-0.5 มม. ยึดในโครงเหล็กเพื่อลดกระแสน้ำวน ช่องสเตเตอร์เต็มไปด้วยขดลวด ลวดทองแดง. ขดลวดของเฟสสเตเตอร์สามารถเชื่อมต่อใน "ดาว" หรือ "สามเหลี่ยม" สำหรับสิ่งนี้อินพุตและเอาต์พุตจะอยู่บนเกราะพิเศษที่แยกได้จากตัวเรือน สิ่งนี้สร้างความสะดวกสบายอย่างมากเนื่องจากสามารถจ่ายแรงดันไฟฟ้าที่มีขนาดต่างกันให้กับขดลวดสเตเตอร์ได้ โรเตอร์ในเครื่องแบบอะซิงโครนัสรวมถึงส่วนที่ปิดอยู่ประกอบด้วยแผ่นเหล็กไฟฟ้าและวางขดลวดไว้ในร่อง ตามหน้าที่ของการออกแบบโรเตอร์ของมอเตอร์แบบอะซิงโครนัส เครื่องจักรจะลัดวงจรและเฟส ขดลวดทองแดงที่ไม่มีฉนวนของโรเตอร์กรงกระรอกในรูปแบบของแท่งถูกวางไว้ในร่อง ปลายแท่งเชื่อมต่อกันด้วยวงแหวนทองแดง ขดลวดประเภทนี้เรียกว่า "กรงกระรอก" บางครั้งใช้หน่วยหมุนเหวี่ยงแทน ไดรฟ์ทรงพลังประกอบด้วยเครื่องจักรแบบอะซิงโครนัสที่มีเฟสโรเตอร์ (มีสลิปริง) พวกเขายังสร้างความพยายามอย่างมากในขณะที่เริ่มต้นจากศูนย์ เพื่อจุดประสงค์นี้ rheostat เริ่มต้นจะรวมอยู่ในขดลวด ในเครื่องจักรอันทรงพลัง ช่องว่างระหว่างโรเตอร์และสเตเตอร์จะอยู่ที่ 1-1.5 มม. ในมอเตอร์ที่ใช้พลังงานต่ำจะยิ่งน้อยกว่า เพลาวางอยู่บนตลับลูกปืนที่ติดตั้งในฝาครอบ
หลักการทำงาน
แรงขับเคลื่อนในเครื่องอะซิงโครนัสคือสนามแม่เหล็กของการหมุน วิธีการทำงานนี้สามารถเห็นได้ในตัวอย่างต่อไปนี้ เมื่อแม่เหล็กรูปตัวยูหมุนระหว่างขั้วซึ่งมีกระบอกโลหะหมุนอย่างอิสระ สนามแม่เหล็กที่หมุนอยู่จะตัดผ่านโรเตอร์ผ่าน เส้นแรง. ในกรณีนี้ กระแสฟูโกต์และสนามแม่เหล็กจะเหนี่ยวนำให้เกิดภายในโรเตอร์ ฟิลด์เหล่านี้ซึ่งมีปฏิสัมพันธ์ซึ่งกันและกันจะเริ่มหมุนโรเตอร์ แม่เหล็กและสนามแม่เหล็กที่สร้างขึ้นจะหมุนพร้อมกัน ในขณะที่ความเร็วของกระบอกสูบจะล้าหลัง (ไม่ตรงกัน) ดังนั้นชื่อของเครื่องอะซิงโครนัส ความล่าช้าในการหมุนของโรเตอร์เมื่อเทียบกับสนามแม่เหล็กจะลื่น
ในตัวอย่างนี้ แหล่งที่มาของการหมุนเวียนของสนามแม่เหล็กและโรเตอร์ถูกขับเคลื่อน แม่เหล็กถาวร. เป็นที่ชัดเจนว่านี่ไม่ใช่มอเตอร์ไฟฟ้าที่จะต้องสร้างสนามแม่เหล็กหมุนเวียน ไฟฟ้าช็อตและตั้งโรเตอร์ให้หมุน ปัญหานี้แก้ไขโดย M.O. Dolivo-Dobrovolsky ซึ่งใช้ กระแสไฟสามเฟส. แกนเหล็กรูปวงแหวน (สเตเตอร์) มีเสาเรียงเป็นวงกลมที่ช่วง 120° โดยที่ขดลวด 3 ตัวของโครงข่ายกระแสไฟ 3 เฟสจะพันกัน แกนกลางเป็นกระบอกสูบโลหะ ซึ่งเป็นต้นแบบของโรเตอร์ของมอเตอร์ไฟฟ้า โดยการเชื่อมต่อขดลวดเข้ากับ "ดาว" หรือ "สามเหลี่ยม" และใช้กระแส 3 เฟสกับขดลวดเหล่านี้ การหมุนจะถูกส่งไปยังสนามแม่เหล็กทั่วไปที่สร้างโดยขั้ว สำหรับหนึ่งรอบของการเปลี่ยนกระแสที่ไหลในขดลวด ฟลักซ์แม่เหล็กก็จะหมุน 360° และเริ่มการหมุนของกระบอกสูบด้วย และนี่คือเครื่องอะซิงโครนัส หากขดลวดที่สองถูกแทนที่ด้วยอันที่สาม แสดงว่าแม่เหล็ก ฟิลด์จะย้อนกลับ สิ่งเดียวกันนี้จะเกิดขึ้นหากเราแทนที่กระแสของเฟสที่สองด้วยเฟสที่สาม ซึ่งหมายความว่าการพลิกกลับของฟลักซ์แม่เหล็กเป็นไปได้หากคุณสลับ 2 เฟสใดๆ
นี่คืออุปกรณ์ของเครื่องอะซิงโครนัสซึ่งสเตเตอร์มี 3 ขดลวด ในนั้นการหมุนของสนามแม่เหล็ก 2 ขั้วตรงกับจำนวนรอบการเปลี่ยนแปลงปัจจุบันในเวลาเท่ากัน ถ้าสเตเตอร์มี 6 ขดลวดในวงกลม สนามแม่เหล็ก 4 ขั้วจะเริ่มต้นขึ้น ถ้าเก้า - a 6 - สนามหมุนเสา ในกรณีของความถี่กระแสไฟ 3 เฟส 50 เฮิรตซ์ สนามจะเปลี่ยนอยู่ที่:
- สเตเตอร์ 2 ขั้ว - 50 รอบต่อนาที
- 4 ขั้ว - 25 รอบต่อนาที
- 6 ขั้ว - 17 รอบต่อนาที
โรเตอร์ของเครื่องจะล่าช้าเล็กน้อยเมื่อเทียบกับฟลักซ์แม่เหล็ก ในกรณีที่ไม่มีการใช้งานของผลิตภัณฑ์ ความคลาดเคลื่อนจะอยู่ที่ 3% ภายใต้การโหลด - 6%
ข้อดีข้อเสีย
ในมวลรวมของเครื่องจักรไฟฟ้าแบบอะซิงโครนัสกับ โรเตอร์กรงกระรอก- ข้างมาก. มันเชื่อมต่อกับ อุปกรณ์ง่ายๆการบำรุงรักษาและการทำงานที่มีความน่าเชื่อถือสูงและต้นทุนต่ำ นอกจากนี้ความเร็วของมอเตอร์ดังกล่าวภายใต้สภาวะโหลดผันแปรยังคงเกือบคงที่เครื่องแบบอะซิงโครนัสที่พิจารณาแล้วไม่จำเป็นต้องใช้แปรงและวงแหวนสัมผัสเนื่องจากกระแสตรงไปยังขดลวดสเตเตอร์แบบ 3 เฟสที่อยู่กับที่ซึ่งสะดวกต่อการใช้งานและทำให้ พวกเขาเกือบจะเป็นสากล หากไม่มีการเชื่อมต่อระหว่างโหลดของเครื่องยนต์กับความเร็ว และไม่จำเป็นต้องควบคุมความเร็ว เครื่องยนต์ก็สามารถเชื่อมต่อโดยตรงกับเครือข่ายใดก็ได้ เฉพาะเมื่อเชื่อมต่อกับเครือข่ายเฟสเดียวจะต้องใช้ตัวเก็บประจุแบบเปลี่ยนเฟสเริ่มต้น
อุปกรณ์เหล่านี้ยังมีข้อเสีย:
- ความต้องการกระแสเริ่มต้นขนาดใหญ่
- แรงบิดเริ่มต้นต่ำ
- ปฏิกิริยาที่คมชัดต่อการเปลี่ยนแปลงพารามิเตอร์เครือข่าย
- เพื่อควบคุมความเร็วที่คุณไม่สามารถทำได้โดยไม่ต้องใช้ตัวแปลงความถี่
- การใช้พลังงานปฏิกิริยาจากเครือข่าย
เครื่องจักรไฟฟ้าเหล่านี้มีข้อ จำกัด ของระบบจ่ายไฟขององค์กรเฉพาะเนื่องจากกระแสไฟเริ่มต้นขนาดใหญ่ที่มีพลังงานต่ำของระบบ "นั่งลง" แรงดันไฟฟ้า นอกจากนี้ยังมีปัจจัยด้านพลังงานต่ำ โดยเฉพาะอย่างยิ่งเมื่อโหลดเบาหรือเปิดอยู่ ไม่ทำงานซึ่งส่งผลเสียต่อระบบไฟฟ้าโดยรวม ที่สถานประกอบการ สิ่งนี้ทำให้เกิดความสูญเสียที่เห็นได้ชัดเจน ดังนั้นจึงมีการใช้ระบบทุกที่เพื่อรักษากำลังไฟฟ้ารีแอกทีฟ ซึ่งตัวเก็บประจุชดเชยจะเชื่อมต่อกับขดลวดของมอเตอร์ น้อยกว่า เริ่มต้นปัจจุบันและแรงบิดเริ่มต้นที่เพิ่มขึ้นนั้นถูกครอบครองโดยเครื่องจักรแบบอะซิงโครนัสที่มีเฟสโรเตอร์พร้อมลิโน่สตาร์ทในวงจร อย่างไรก็ตาม สิ่งนี้ทำให้การออกแบบซับซ้อนและเพิ่มต้นทุน
แอปพลิเคชั่น
ทั้งอุตสาหกรรม การขนส่ง หรือชีวิตประจำวัน ฯลฯ ไม่สามารถทำได้โดยไม่ต้องใช้เครื่อง asynchronous กับโรเตอร์กรงกระรอก พวกมันถูกใช้เกือบทุกที่ เหล่านี้คือไดรฟ์ไฟฟ้าของเครื่องดูดควัน, เครน, โรงงานลูกบอล, ปั๊ม, กว้าน, เครื่องย่อยขยะ, เครื่องมือกล, เครื่องใช้ในครัวเรือน. หากจำเป็น การเปลี่ยนความเร็วทีละขั้น (ในลิฟต์ตัวเดียวกัน) จะใช้มอเตอร์แบบอะซิงโครนัสแบบหลายความเร็ว ในกรณีที่คุณต้องการหยุดและแก้ไขเพลาอย่างรวดเร็วเมื่อแรงดันไฟฟ้าหายไป คุณไม่สามารถทำได้หากไม่มีมอเตอร์แบบอะซิงโครนัสที่มีการหยุดด้วยแม่เหล็กไฟฟ้า (เครื่อง, รอก) มอเตอร์แบบอะซิงโครนัสที่มีสลิปจำนวนมากสามารถรับมือได้ดีกับการทำงานที่ไม่ต่อเนื่องและการกระเพื่อมของโหลด ประยุกต์กว้างยังพบได้ในมอเตอร์แบบอะซิงโครนัสเชิงเส้นเนื่องจากการผลิตที่เรียบง่ายและความน่าเชื่อถือที่ดี เครื่องจักรแบบเฟสเดียวมีอุปกรณ์ขนาดเล็ก (พัดลมในครัวเรือน ปั๊มขนาดเล็ก ฯลฯ)
เครื่องอะซิงโครนัส 2 เฟสมีประสิทธิภาพสูงสุดเมื่อขับเคลื่อนด้วย เครือข่ายเฟสเดียวกระแสสลับ. ชื่ออื่นของพวกเขาคือ มอเตอร์ตัวเก็บประจุเนื่องจากไม่สามารถทำงานได้หากไม่มี Phase-shifting Capacitor เครื่องจักรไฟฟ้า 3 เฟสถูกติดตั้งบนเครื่องมือกล รอก โรงเลื่อย เครนก่อสร้าง ฯลฯ สำหรับเครื่อง 3 เฟสแบบอะซิงโครนัสที่มีเฟสโรเตอร์ราคาจะสูงกว่าเครื่องจักร ด้วยโรเตอร์กรงกระรอก แต่ช่วงเวลาโหลดเริ่มต้นของพวกมันมีมากกว่านั้นมาก ดังนั้น มอเตอร์เหล่านี้จึงประกอบขึ้นเป็นไดรฟ์บนลิฟต์และเครน กล่าวคือ เมื่อต้องสตาร์ทภายใต้สภาวะโหลด

เครื่องอะซิงโครนัส
บรรยาย 5
ปัจจุบันเครื่องอะซิงโครนัสส่วนใหญ่ใช้ในโหมดมอเตอร์ เครื่องจักรที่มีกำลังมากกว่า 0.5 กิโลวัตต์มักจะเป็นแบบสามเฟสและมีกำลังน้อยกว่า - เฟสเดียว
เป็นครั้งแรกที่การออกแบบมอเตอร์แบบอะซิงโครนัสสามเฟสได้รับการพัฒนา สร้างและทดสอบโดยวิศวกรชาวรัสเซียของเรา M. O. Dolivo-Dobrovolsky ในปี 1889-91
การสาธิตเครื่องยนต์ชุดแรกเกิดขึ้นที่งาน International Electrical Exhibition ในเมืองแฟรงก์เฟิร์ต อัม ไมน์ ในเดือนกันยายน พ.ศ. 2434 มีการนำเสนอมอเตอร์สามเฟสสามตัวในนิทรรศการ พลังที่แตกต่าง. ที่ทรงพลังที่สุดของพวกเขามีกำลัง 1.5 กิโลวัตต์และถูกใช้เพื่อขับเคลื่อนเครื่องกำเนิดไฟฟ้ากระแสตรง การออกแบบมอเตอร์แบบอะซิงโครนัสที่เสนอโดย Dolivo-Dobrovolsky ประสบความสำเร็จอย่างมากและเป็นประเภทหลักของการออกแบบมอเตอร์เหล่านี้จนถึงปัจจุบัน
ในช่วงหลายปีที่ผ่านมา มอเตอร์แบบอะซิงโครนัสได้ค้นพบการใช้งานที่กว้างขวางในอุตสาหกรรมและการเกษตรต่างๆ
ใช้ในไดรฟ์ไฟฟ้าของเครื่องตัดโลหะ, เครื่องยกและขนส่ง, สายพานลำเลียง, ปั๊ม, พัดลม มอเตอร์กำลังต่ำใช้ในอุปกรณ์อัตโนมัติ
การใช้มอเตอร์เหนี่ยวนำอย่างแพร่หลายนั้นเนื่องมาจาก
ข้อดีเมื่อเทียบกับมอเตอร์อื่นๆ: ความน่าเชื่อถือสูง ความสามารถในการทำงานโดยตรงจากไฟ AC ความสะดวกในการบำรุงรักษา
5.2. อุปกรณ์ของเครื่องอะซิงโครนัสสามเฟส
ส่วนคงที่ของเครื่องเรียกว่า สเตเตอร์, มือถือ - โรเตอร์. แกนสเตเตอร์ทำจากเหล็กแผ่นไฟฟ้าและกดเข้าไปในเฟรม ในรูป 5.1 แสดงการประกอบแกนสเตเตอร์ โครง (1) ทำจากวัสดุหล่อที่ไม่ใช่แม่เหล็ก ส่วนใหญ่แล้วเตียงทำจากเหล็กหล่อหรืออลูมิเนียม บนพื้นผิวด้านในของแผ่น (2) ซึ่งทำจากแกนสเตเตอร์มีร่องซึ่ง ขดลวดสามเฟส (3). ขดลวดสเตเตอร์ส่วนใหญ่ทำจากลวดทองแดงหุ้มฉนวนที่มีหน้าตัดกลมหรือสี่เหลี่ยม ส่วนใหญ่มักจะทำจากอลูมิเนียม
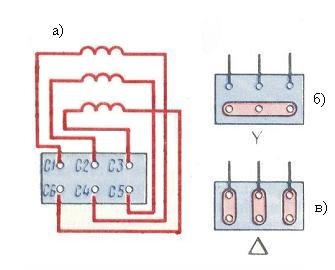
ขดลวดสเตเตอร์ประกอบด้วยสามส่วนที่เรียกว่า ขั้นตอน. จุดเริ่มต้นของเฟสจะแสดงด้วยตัวอักษรตั้งแต่ 1 จาก 2 จาก 3 จุดสิ้นสุด - จาก 4 จาก 5 จาก 6
จุดเริ่มต้นและจุดสิ้นสุดของเฟสจะแสดงบนแผงขั้วต่อ (รูปที่ 5.2 a) ซึ่งกำหนดไว้ที่เฟรม ขดลวดสเตเตอร์สามารถเชื่อมต่อได้ตามรูปแบบดาว (รูปที่ 5.2 b) หรือเดลต้า (รูปที่ 5.2 c) ทางเลือกของรูปแบบการเชื่อมต่อที่คดเคี้ยวของสเตเตอร์ขึ้นอยู่กับ แรงดันไฟฟ้าข้อมูลเครือข่ายและหนังสือเดินทางของเครื่องยนต์ ในหนังสือเดินทาง มอเตอร์สามเฟสมีการตั้งค่าแรงดันไฟฟ้าของเครือข่ายและไดอะแกรมการเชื่อมต่อของขดลวดสเตเตอร์ ตัวอย่างเช่น 660/380 ใช่/∆ เครื่องยนต์นี้สามารถเชื่อมต่อกับเครือข่ายด้วย Ul \u003d 660V ตามรูปแบบดาวหรือกับเครือข่ายที่มี Ul \u003d 380V - ตามรูปแบบสามเหลี่ยม
จุดประสงค์หลักของขดลวดสเตเตอร์คือการสร้างสนามแม่เหล็กหมุนในเครื่อง
แกนโรเตอร์(รูปที่ 5.3 b) คัดเลือกจากแผ่นเหล็กไฟฟ้าที่ด้านนอกซึ่งมีร่องวางโรเตอร์โรเตอร์ ขดลวดโรเตอร์มีสองประเภท: ไฟฟ้าลัดวงจรและ เฟส. ดังนั้นมอเตอร์แบบอะซิงโครนัสจึงมาพร้อมกับโรเตอร์กรงกระรอกและโรเตอร์เฟส (พร้อมวงแหวนลื่น)
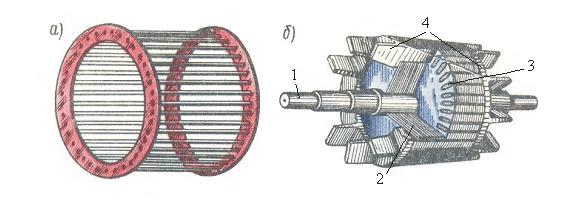
ข้าว. 5.3
ขดลวดลัดวงจร (รูปที่ 5.3) ของโรเตอร์ประกอบด้วยแท่ง 3 ซึ่งวางอยู่ในร่องของแกนโรเตอร์ จากปลายแท่งเหล่านี้ปิดด้วยวงแหวนปลาย 4 ขดลวดดังกล่าวคล้ายกับ "วงล้อกระรอก" และเรียกว่า "กรงกระรอก" (รูปที่ 5.3 a) มอเตอร์กรงกระรอกไม่มีหน้าสัมผัสที่เคลื่อนไหว ด้วยเหตุนี้เครื่องยนต์ดังกล่าวจึงมีความน่าเชื่อถือสูง ขดลวดโรเตอร์ทำจากทองแดง อลูมิเนียม ทองเหลือง และวัสดุอื่นๆ
Dolivo-Dobrovolsky เป็นคนแรกที่สร้างเครื่องยนต์ด้วยโรเตอร์กรงกระรอกและสำรวจคุณสมบัติของเครื่องยนต์ เขาพบว่าเครื่องยนต์ดังกล่าวมีข้อเสียอย่างร้ายแรง - จำกัด แรงบิดเริ่มต้น. Dolivo-Dobrovolsky เรียกเหตุผลสำหรับข้อบกพร่องนี้ - โรเตอร์ที่สั้นมาก เขายังเสนอการออกแบบเครื่องยนต์ที่มีเฟสโรเตอร์
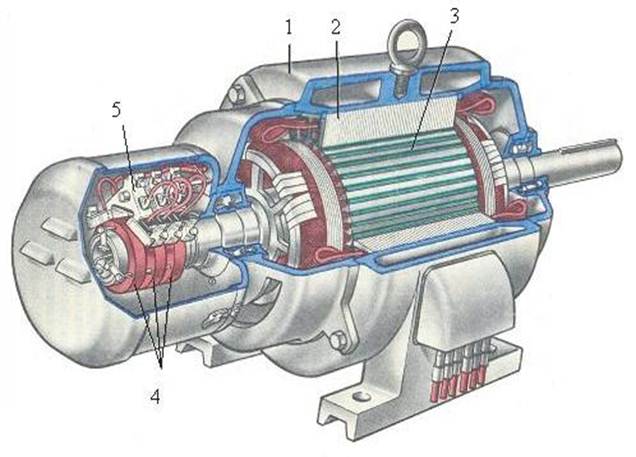
ในรูป 5.4 แสดงภาพตัดขวางของเครื่องอะซิงโครนัสที่มีเฟสโรเตอร์: 1 - เฟรม, 2 - ขดลวดสเตเตอร์, 3 - โรเตอร์, 4 - วงแหวนลื่น, 5 - แปรง
ที่เฟสโรเตอร์ ขดลวดเป็นแบบสามเฟส คล้ายกับขดลวดสเตเตอร์ โดยมีจำนวนขั้วคู่เท่ากัน การหมุนที่คดเคี้ยวจะถูกวางในร่องของแกนโรเตอร์และเชื่อมต่อตามแบบแผนของดาว ปลายแต่ละเฟสเชื่อมต่อกับวงแหวนสัมผัสที่ยึดกับเพลาโรเตอร์และนำออกสู่วงจรภายนอกผ่านแปรง แหวนลื่นทำจากทองเหลืองหรือเหล็กและต้องหุ้มฉนวนจากกันและจากเพลา แปรงโลหะ-กราไฟต์ใช้แปรงซึ่งกดกับแหวนลื่นโดยใช้สปริงที่ยึดแปรงจับจ้องไปที่ตัวเครื่องโดยไม่เคลื่อนไหว ในรูป 5.5 ให้ เครื่องหมายมอเตอร์แบบอะซิงโครนัสที่มีโรเตอร์แบบกรงกระรอก (a) และเฟส (b)
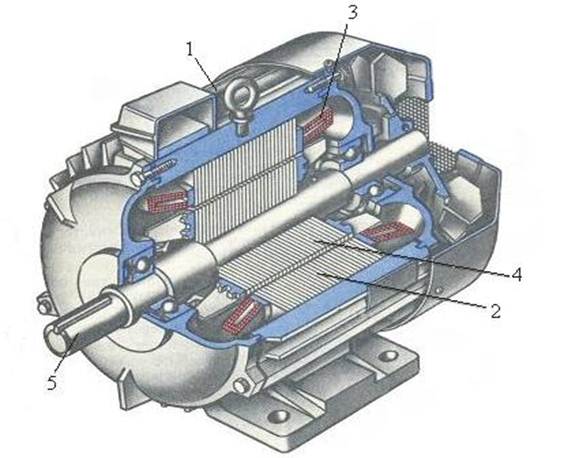
ในรูป 5.6 แสดงภาพตัดขวางของเครื่องอะซิงโครนัสพร้อมโรเตอร์กรงกระรอก: 1 - เฟรม, 2 - แกนสเตเตอร์, 3 - ขดลวดสเตเตอร์, 4 - แกนโรเตอร์พร้อมขดลวดกรงกระรอก, 5 - เพลา

บนโล่ของเครื่องซึ่งติดตั้งอยู่บนเตียงจะได้รับข้อมูล: R n, U n, I n, n n รวมถึงประเภทของเครื่อง
- P n คือกำลังสุทธิที่กำหนด (บนเพลา)
- U n และ I n - ค่าเล็กน้อยของแรงดันและกระแสสำหรับรูปแบบการเชื่อมต่อที่ระบุ ตัวอย่างเช่น 380/220, Y/∆, InY/In∆
- n n - ความเร็วที่กำหนดเป็น rpm
ตัวอย่างเช่น ประเภทเครื่อง กำหนดเป็น 4AH315S8 นี่คือมอเตอร์แบบอะซิงโครนัส (A) ของการออกแบบที่ได้รับการป้องกันชุดที่สี่ หากไม่มีตัวอักษร H แสดงว่าเครื่องยนต์เป็นแบบปิด
- 315 - ความสูงของแกนหมุนเป็นมม.
- S - ขนาดการติดตั้ง (กำหนดไว้ในหนังสืออ้างอิง);
- 8 - จำนวนเสาของเครื่อง