มอเตอร์ไฟฟ้าจำเป็นสำหรับการเร่งความเร็วและการเบรกที่ราบรื่น แอพพลิเคชั่นกว้างได้รับอุปกรณ์ดังกล่าวในอุตสาหกรรม ด้วยความช่วยเหลือของพวกเขา เปลี่ยนความเร็วของสายพานลำเลียง การหมุนของพัดลม มอเตอร์ 12 โวลต์ใช้ในระบบควบคุมและรถยนต์ ทุกคนเคยเห็นสวิตช์ที่เปลี่ยนความเร็วของพัดลมเตาในรถยนต์ นี่คือตัวควบคุมประเภทหนึ่ง เพียงแต่มันไม่ได้ถูกออกแบบมาให้ทำงานได้อย่างราบรื่น การเปลี่ยนแปลงความเร็วในการหมุนเกิดขึ้นในขั้นตอน
การประยุกต์ใช้ตัวแปลงความถี่
ตัวแปลงความถี่ใช้เป็นตัวควบคุมความเร็วและ 380V อุปกรณ์อิเล็กทรอนิกส์ไฮเทคเหล่านี้ช่วยให้คุณเปลี่ยนลักษณะของกระแส (รูปคลื่นและความถี่) ได้อย่างรุนแรง พวกมันใช้ทรานซิสเตอร์เซมิคอนดักเตอร์ที่ทรงพลังและโมดูเลเตอร์ความกว้างพัลส์ การทำงานทั้งหมดของอุปกรณ์ถูกควบคุมโดยบล็อกบนไมโครคอนโทรลเลอร์ การเปลี่ยนความเร็วของการหมุนของโรเตอร์ของเครื่องยนต์เป็นไปอย่างราบรื่น
ดังนั้นจึงใช้ในกลไกการโหลด ยิ่งการเร่งความเร็วช้าลงเท่าใด สายพานลำเลียงหรือกระปุกเกียร์ก็จะเกิดความเครียดน้อยลงเท่านั้น Chastotniki ทั้งหมดมีการป้องกันหลายระดับ - สำหรับกระแส, โหลด, แรงดันและอื่น ๆ ตัวแปลงความถี่บางรุ่นใช้พลังงานจาก แรงดันไฟฟ้าเฟสเดียว(220โวลต์)ให้เป็นสามเฟส. สิ่งนี้ช่วยให้คุณเชื่อมต่อมอเตอร์แบบอะซิงโครนัสที่บ้านโดยไม่ต้องใช้ แผนการที่ซับซ้อน. และพลังงานจะไม่สูญหายเมื่อทำงานกับอุปกรณ์ดังกล่าว
หน่วยงานกำกับดูแลใช้สำหรับอะไร?
ในกรณีของมอเตอร์แบบอะซิงโครนัส ตัวควบคุมความเร็วจำเป็นสำหรับ:
- ประหยัดพลังงานได้มาก. ท้ายที่สุดแล้วไม่จำเป็นต้องใช้ทุกกลไก ความเร็วสูงการหมุนของมอเตอร์ - บางครั้งอาจลดลงได้ 20-30% ซึ่งจะช่วยลดค่าพลังงานลงครึ่งหนึ่ง
- การป้องกันกลไกและวงจรอิเล็กทรอนิกส์. ด้วยความช่วยเหลือของตัวแปลงความถี่ จึงสามารถควบคุมอุณหภูมิ ความดัน และพารามิเตอร์อื่นๆ ได้มากมาย หากเครื่องยนต์ทำงานเป็นปั๊มขับเคลื่อน จะต้องติดตั้งเซ็นเซอร์ความดันในถังที่ปั๊มอากาศหรือของเหลว และเมื่อถึงค่าสูงสุด มอเตอร์ก็จะดับ
- ความสำเร็จ เริ่มอ่อน . ไม่จำเป็นต้องใช้อุปกรณ์อิเล็กทรอนิกส์เพิ่มเติม - ทุกอย่างสามารถทำได้โดยเปลี่ยนการตั้งค่า ตัวแปลงความถี่.
- ลดต้นทุนการบำรุงรักษา. ด้วยความช่วยเหลือของตัวควบคุมความเร็วสำหรับมอเตอร์ไฟฟ้า 220V ความเสี่ยงของความล้มเหลวของไดรฟ์และกลไกแต่ละตัวจะลดลง

รูปแบบการสร้างตัวแปลงความถี่นั้นแพร่หลายในหลาย ๆ เครื่องใช้ในครัวเรือน. สิ่งที่คล้ายกันสามารถพบได้ในแหล่งที่มา เครื่องสำรองไฟ, เครื่องเชื่อม, เครื่องปรับแรงดันไฟฟ้า, อุปกรณ์จ่ายไฟสำหรับคอมพิวเตอร์, แล็ปท็อป, ที่ชาร์จโทรศัพท์, ชุดจุดระเบิดสำหรับหลอดไฟแบ็คไลท์ของทีวี LCD และจอภาพสมัยใหม่
การควบคุมการหมุนทำงานอย่างไร
คุณสามารถสร้างตัวควบคุมความเร็วมอเตอร์ด้วยมือของคุณเอง แต่สำหรับสิ่งนี้คุณจะต้องศึกษาประเด็นทางเทคนิคทั้งหมด โครงสร้างมีองค์ประกอบหลักหลายประการ ได้แก่ :
- มอเตอร์ไฟฟ้า.
- ระบบควบคุมไมโครคอนโทรลเลอร์และคอนเวอร์เตอร์ยูนิต
- ไดรฟ์และกลไกที่เกี่ยวข้อง
ในช่วงเริ่มต้นของการทำงาน หลังจากใช้แรงดันไฟฟ้ากับขดลวดแล้ว โรเตอร์ของมอเตอร์จะหมุนด้วยกำลังสูงสุด คุณลักษณะนี้ทำให้เครื่องอะซิงโครนัสแตกต่างจากเครื่องอื่นๆ ในการนี้จะมีการเพิ่มโหลดจากกลไกที่เคลื่อนไหว เป็นผลให้เมื่อ ชั้นต้นการใช้พลังงานและกระแสไฟฟ้าเพิ่มขึ้นสูงสุด

ความร้อนจำนวนมากถูกปล่อยออกมา ทั้งขดลวดและสายไฟร้อนเกินไป การใช้ตัวแปลงความถี่จะช่วยกำจัดสิ่งนี้ ถ้าตั้ง เริ่มต้นอย่างราบรื่นแล้วถึง ความเร็วสูงสุด(ซึ่งควบคุมโดยอุปกรณ์เช่นกันและอาจไม่ใช่ 1,500 รอบต่อนาที แต่เพียง 1,000) เครื่องยนต์จะไม่เร่งทันที แต่เป็นเวลา 10 วินาที (เพิ่ม 100-150 รอบต่อวินาที) ในขณะเดียวกันภาระของกลไกและสายไฟทั้งหมดจะลดลงอย่างมาก
เครื่องควบคุมแบบโฮมเมด
คุณสามารถสร้างตัวควบคุมความเร็วมอเตอร์ไฟฟ้า 12V ได้อย่างอิสระ สิ่งนี้จะต้องใช้สวิตช์หลายตำแหน่งและตัวต้านทานแบบลวด ด้วยความช่วยเหลือของหลังแรงดันของแหล่งจ่ายจะเปลี่ยนไป (และด้วยความเร็วในการหมุน) สามารถใช้ระบบที่คล้ายกันสำหรับ มอเตอร์เหนี่ยวนำแต่มีประสิทธิภาพน้อยกว่า เมื่อหลายปีก่อน มีการใช้ตัวควบคุมเชิงกลกันอย่างแพร่หลาย โดยอิงจากเฟืองขับหรือตัวแปรผัน แต่พวกเขาไม่น่าเชื่อถือมาก วิธีการทางอิเล็กทรอนิกส์แสดงให้เห็นว่าตัวเองดีขึ้นมาก ท้ายที่สุดแล้วมันไม่เทอะทะและให้คุณปรับแต่งไดรฟ์ได้อย่างละเอียด

ในการสร้างตัวควบคุมการหมุนของมอเตอร์ คุณจะต้องมีอุปกรณ์อิเล็กทรอนิกส์หลายอย่างที่สามารถซื้อได้จากร้านค้าหรือถอดออกจากอุปกรณ์อินเวอร์เตอร์เก่า ผลลัพธ์ที่ดีแสดงโดย VT138-600 triac ในวงจรของอุปกรณ์อิเล็กทรอนิกส์ดังกล่าว ในการปรับคุณต้องรวมไว้ในวงจร ตัวต้านทานปรับค่าได้. ด้วยความช่วยเหลือแอมพลิจูดของสัญญาณที่เข้าสู่ไตรแอกจะเปลี่ยนไป
การดำเนินการตามระบบการจัดการ

เพื่อปรับปรุงพารามิเตอร์ให้ได้มากที่สุด อุปกรณ์ง่ายๆคุณจะต้องรวมการควบคุมไมโครคอนโทรลเลอร์ไว้ในวงจรควบคุมความเร็วมอเตอร์ ในการทำเช่นนี้คุณต้องเลือกโปรเซสเซอร์ที่มีจำนวนอินพุตและเอาต์พุตที่เหมาะสม - เพื่อเชื่อมต่อเซ็นเซอร์ ปุ่ม กุญแจอิเล็กทรอนิกส์. สำหรับการทดลอง คุณสามารถใช้ไมโครคอนโทรลเลอร์ AtMega128 ซึ่งเป็นที่นิยมและใช้งานง่ายที่สุด ในสาธารณสมบัติ คุณสามารถค้นหาวงจรจำนวนมากโดยใช้ตัวควบคุมนี้ การค้นหาสิ่งเหล่านี้ด้วยตัวคุณเองและนำไปปฏิบัตินั้นไม่ใช่เรื่องยาก เพื่อให้ทำงานได้อย่างถูกต้อง คุณจะต้องเขียนอัลกอริทึมลงไป - ตอบสนองต่อการกระทำบางอย่าง ตัวอย่างเช่น เมื่ออุณหภูมิถึง 60 องศา (การวัดเกิดขึ้นที่หม้อน้ำของอุปกรณ์) ควรปิดเครื่อง
ในที่สุด
หากคุณตัดสินใจที่จะไม่สร้างอุปกรณ์ด้วยตัวเอง แต่จะซื้ออุปกรณ์สำเร็จรูป ให้ใส่ใจกับพารามิเตอร์หลัก เช่น พลังงาน ประเภทของระบบควบคุม แรงดันไฟฟ้า ความถี่ เป็นที่พึงปรารถนาในการคำนวณลักษณะของกลไกที่มีการวางแผนที่จะใช้ตัวควบคุมแรงดันไฟฟ้าของมอเตอร์ และอย่าลืมเปรียบเทียบกับพารามิเตอร์ของตัวแปลงความถี่
เป็นไปได้ที่จะปรับความเร็วของการหมุนของเพลาของมอเตอร์ไฟฟ้าแบบสะสมที่มีกำลังไฟต่ำโดยเชื่อมต่อเป็นอนุกรมกับวงจรจ่ายไฟ แต่ตัวเลือกนี้สร้างประสิทธิภาพที่ต่ำมากและไม่สามารถเปลี่ยนความเร็วการหมุนได้อย่างราบรื่น
สิ่งสำคัญคือบางครั้งวิธีนี้นำไปสู่การหยุดมอเตอร์ไฟฟ้าโดยสมบูรณ์ที่แรงดันไฟฟ้าต่ำ ตัวควบคุมความเร็วมอเตอร์ไฟฟ้า วงจร DC ที่อธิบายไว้ในบทความนี้ไม่มีข้อบกพร่องเหล่านี้ โครงร่างเหล่านี้สามารถใช้เพื่อเปลี่ยนความสว่างของหลอดไส้เป็น 12 โวลต์ได้สำเร็จ
คำอธิบายของตัวควบคุมความเร็วมอเตอร์ 4 แบบ
รูปแบบแรก
เปลี่ยนความเร็วในการหมุนด้วยตัวต้านทานผันแปร R5 ซึ่งจะเปลี่ยนระยะเวลาของพัลส์ เนื่องจากแอมพลิจูดของพัลส์ PWM นั้นคงที่และเท่ากับแรงดันไฟฟ้าของมอเตอร์ไฟฟ้า จึงไม่หยุดแม้ที่ความเร็วการหมุนที่ต่ำมาก
รูปแบบที่สอง
มันคล้ายกับรุ่นก่อนหน้า แต่ใช้แอมพลิฟายเออร์สำหรับการดำเนินงาน DA1 (K140UD7) เป็นออสซิลเลเตอร์หลัก
op-amp นี้ทำหน้าที่เป็นเครื่องกำเนิดแรงดันไฟฟ้าที่สร้างพัลส์รูปสามเหลี่ยมและมีความถี่ 500 Hz ตัวต้านทานปรับค่าได้ R7 กำหนดความเร็วของมอเตอร์
รูปแบบที่สาม
เธอเป็นคนแปลก ๆ สร้างขึ้นจากที่เธอเป็นอยู่ ออสซิลเลเตอร์หลักทำงานที่ความถี่ 500 Hz ความกว้างของพัลส์และดังนั้นความเร็วของเครื่องยนต์จึงสามารถเปลี่ยนจาก 2% เป็น 98%
จุดอ่อนในรูปแบบทั้งหมดข้างต้นคือพวกเขาไม่มีองค์ประกอบสำหรับการรักษาความเร็วด้วยการเพิ่มหรือลดภาระบนเพลาของมอเตอร์กระแสตรง คุณสามารถแก้ปัญหานี้ได้ด้วยโครงร่างต่อไปนี้:
เช่นเดียวกับเรกูเลเตอร์ที่คล้ายกันส่วนใหญ่ วงจรของเรกูเลเตอร์นี้มีเครื่องกำเนิดแรงดันไฟฟ้าหลักที่สร้างพัลส์รูปสามเหลี่ยมที่มีความถี่ 2 kHz ความเฉพาะเจาะจงทั้งหมดของวงจรคือการมีข้อเสนอแนะเชิงบวก (POS) ผ่านองค์ประกอบ R12, R11, VD1, C2, DA1.4 ซึ่งทำให้ความเร็วของเพลามอเตอร์คงที่โดยเพิ่มหรือลดโหลด
เมื่อสร้างวงจรด้วยเครื่องยนต์บางตัวความต้านทาน R12 ความลึกของ POS ดังกล่าวจะถูกเลือกซึ่งการสั่นของความเร็วในการหมุนจะไม่เกิดขึ้นเมื่อโหลดเปลี่ยนแปลง
รายละเอียด ตัวปรับรอบการหมุนของมอเตอร์
ในวงจรเหล่านี้คุณสามารถใช้การเปลี่ยนส่วนประกอบวิทยุต่อไปนี้: ทรานซิสเตอร์ KT817B - KT815, KT805; KT117A สามารถเปลี่ยน KT117B-G หรือ 2N2646 ได้ แอมพลิฟายเออร์ปฏิบัติการ K140UD7 บน K140UD6, KR544UD1, TL071, TL081; ตัวจับเวลา NE555 - S555, KR1006VI1; ชิป TL074 - TL064, TL084, LM324
เมื่อใช้โหลดที่ทรงพลังกว่า สามารถเปลี่ยนทรานซิสเตอร์คีย์ KT817 เป็นทรานซิสเตอร์ฟิลด์เอฟเฟกต์ที่ทรงพลังได้ เช่น IRF3905 หรือที่คล้ายกัน
สวัสดีทุกคน นักวิทยุสมัครเล่นหลายคนเช่นฉันอาจมีงานอดิเรกมากกว่าหนึ่งอย่าง แต่มีหลายอย่าง นอกจากการออกแบบอุปกรณ์อิเล็กทรอนิกส์แล้ว ฉันยังทำงานด้านการถ่ายภาพ ถ่ายวิดีโอด้วยกล้อง DSLR และตัดต่อวิดีโออีกด้วย ในฐานะช่างวิดีโอ ฉันต้องการแถบเลื่อนสำหรับการถ่ายวิดีโอ ก่อนอื่นฉันจะอธิบายคร่าวๆ ว่ามันคืออะไร ภาพด้านล่างแสดงตัวเลื่อนโรงงาน
ตัวเลื่อนออกแบบมาสำหรับการถ่ายวิดีโอด้วยกล้องและกล้องวิดีโอ คล้ายกับระบบรางที่ใช้ในโรงภาพยนตร์จอกว้าง ด้วยความช่วยเหลือของมัน การเคลื่อนไหวที่ราบรื่นของกล้องรอบๆ วัตถุที่กำลังถ่ายทำจึงถูกสร้างขึ้น เอฟเฟ็กต์ที่ทรงพลังอีกอย่างที่สามารถใช้เมื่อทำงานกับแถบเลื่อนคือความสามารถในการขยับเข้าใกล้หรือออกห่างจากตัวแบบ ภาพถัดไปแสดงเครื่องยนต์ที่ฉันเลือกทำแถบเลื่อน

ตัวเลื่อนใช้พลังงานจากมอเตอร์ไฟฟ้ากระแสตรง 12 โวลต์ บนอินเทอร์เน็ตพบวงจรควบคุมสำหรับเครื่องยนต์ที่เลื่อนแคร่เลื่อน ในภาพถัดไป ไฟแสดงสถานะเปิด/ปิดบน LED สวิตช์สลับที่ควบคุมการถอยหลังและสวิตช์เปิด/ปิด

เมื่อใช้งานอุปกรณ์ดังกล่าว สิ่งสำคัญคือต้องมีการควบคุมความเร็วที่ราบรื่น รวมทั้งการย้อนกลับของเครื่องยนต์ได้ง่าย ความเร็วของการหมุนของเพลามอเตอร์ ในกรณีของการใช้เรกูเลเตอร์ของเรา จะถูกควบคุมอย่างราบรื่นโดยการหมุนปุ่มของตัวต้านทานแบบปรับค่าได้ 5 kOhm บางทีไม่ใช่แค่ฉันซึ่งเป็นหนึ่งในผู้ใช้ไซต์นี้ที่ชื่นชอบการถ่ายภาพและมีคนอื่นต้องการทำซ้ำอุปกรณ์นี้ ผู้ที่ต้องการดาวน์โหลดไฟล์เก็บถาวรพร้อมวงจรและแผงวงจรพิมพ์ของตัวควบคุมที่ท้ายบทความ . รูปต่อไปนี้แสดง แผนภูมิวงจรรวมตัวควบคุมเครื่องยนต์:
วงจรเรกูเลเตอร์

วงจรนี้ง่ายมากและสามารถประกอบได้ง่ายแม้แต่นักวิทยุสมัครเล่นมือใหม่ จากข้อดีของการประกอบอุปกรณ์นี้ ฉันบอกได้เลยว่าอุปกรณ์นี้มีราคาย่อมเยาและสามารถปรับแต่งให้เหมาะกับความต้องการของคุณได้ รูปแสดงแผงวงจรพิมพ์ของเรกูเลเตอร์:

แต่ขอบเขตของตัวควบคุมนี้ไม่ได้จำกัดเฉพาะแถบเลื่อนเพียงอย่างเดียว สามารถใช้เป็นตัวควบคุมความเร็วได้ง่าย เช่น สว่านของเครื่องจักร เดรเมลแบบโฮมเมดที่ใช้พลังงานจาก 12 โวลต์ หรือตัวทำความเย็นคอมพิวเตอร์ เช่น ขนาด 80 x 80 หรือ 120 x 120 มม. ฉันยังพัฒนารูปแบบสำหรับการย้อนกลับของเครื่องยนต์หรืออีกนัยหนึ่งคือการเปลี่ยนการหมุนของเพลาอย่างรวดเร็วในทิศทางอื่น ในการทำเช่นนี้ ฉันใช้สวิตช์สลับหกพินที่มี 2 ตำแหน่ง รูปต่อไปนี้แสดงไดอะแกรมการเชื่อมต่อ:

หน้าสัมผัสตรงกลางของสวิตช์สลับที่มีเครื่องหมาย (+) และ (-) เชื่อมต่อกับหน้าสัมผัสบนกระดานที่มีเครื่องหมาย M1.1 และ M1.2 ขั้วไม่สำคัญ ทุกคนรู้ว่าตัวทำความเย็นของคอมพิวเตอร์เมื่อแรงดันไฟฟ้าและความเร็วตามนั้นทำให้เกิดเสียงรบกวนน้อยลงในการทำงาน ในภาพถัดไป ทรานซิสเตอร์ KT805AM บนหม้อน้ำ:

สามารถใช้ทรานซิสเตอร์ขนาดกลางถึงใหญ่ในวงจรได้เกือบทุกชนิด พลัง n-p-nโครงสร้าง นอกจากนี้ยังสามารถแทนที่ไดโอดด้วยแอนะล็อกที่เหมาะกับกระแส เช่น 1N4001, 1N4007 และอื่นๆ เอาต์พุตของมอเตอร์ถูกปัดเศษด้วยไดโอดย้อนกลับ ซึ่งทำขึ้นเพื่อป้องกันทรานซิสเตอร์ในขณะที่เปิดและปิดวงจร เนื่องจากมอเตอร์ที่เรามีนั้นเป็นโหลดแบบอุปนัย นอกจากนี้วงจรยังแสดงการรวมแถบเลื่อนบน LED ที่ต่ออนุกรมกับตัวต้านทาน

เมื่อใช้เครื่องยนต์ พลังงานมากขึ้นกว่าที่แสดงในรูปภาพต้องติดทรานซิสเตอร์กับหม้อน้ำเพื่อให้ระบายความร้อนได้ดีขึ้น รูปภาพของบอร์ดผลลัพธ์แสดงอยู่ด้านล่าง:

อภิปรายบทความ ENGINE SPEED REGULATOR with REVERSE
เมื่อใช้มอเตอร์ไฟฟ้าในเครื่องมือ ปัญหาสำคัญประการหนึ่งคือการปรับความเร็วของการหมุน หากความเร็วไม่เร็วพอ การทำงานของเครื่องมือจะไม่มีประสิทธิภาพเพียงพอ
หากสูงเกินไปสิ่งนี้ไม่เพียงนำไปสู่การใช้จ่ายมากเกินไปเท่านั้น พลังงานไฟฟ้าแต่ยังรวมถึงความเหนื่อยหน่ายของเครื่องมือด้วย เมื่อไหร่ด้วย ความเร็วสูงการหมุน การทำงานของเครื่องมืออาจคาดการณ์ได้น้อยลง จะแก้ไขได้อย่างไร? เพื่อจุดประสงค์นี้เป็นเรื่องปกติที่จะใช้ตัวควบคุมความเร็วพิเศษ
มอเตอร์สำหรับเครื่องมือไฟฟ้าและ เครื่องใช้ในครัวเรือนมักจะหมายถึงหนึ่งใน 2 ประเภทหลัก:
- มอเตอร์สะสม
- มอเตอร์แบบอะซิงโครนัส
ในอดีต ประเภทที่สองของประเภทเหล่านี้เป็นประเภทที่พบบ่อยที่สุด ปัจจุบัน มอเตอร์ประมาณ 85% ที่ใช้ในเครื่องมือไฟฟ้า เครื่องใช้ในบ้านหรือในครัวเป็นประเภทคอมมิวเตเตอร์ สิ่งนี้อธิบายได้จากข้อเท็จจริงที่ว่าพวกมันมีความกะทัดรัดในระดับที่มากกว่า พวกมันมีพลังมากกว่าและกระบวนการควบคุมพวกมันนั้นง่ายกว่า
การทำงานของมอเตอร์ไฟฟ้านั้นสร้างขึ้นจากหลักการง่ายๆ:ถ้าวางกรอบสี่เหลี่ยมไว้ระหว่างขั้วของแม่เหล็กซึ่งสามารถหมุนรอบแกนของมันได้และปล่อยไปตามนั้น กระแสตรง.กรอบจะหมุน ทิศทางการหมุนถูกกำหนดโดย "กฎมือขวา"
รูปแบบนี้สามารถใช้เพื่อควบคุมเครื่องยนต์สะสม
จุดสำคัญที่นี่คือการเชื่อมต่อกระแสกับเฟรมนี้เนื่องจากมันหมุนจึงใช้หน้าสัมผัสแบบเลื่อนพิเศษสำหรับสิ่งนี้ หลังจากที่เฟรมหมุน 180 องศา กระแสผ่านหน้าสัมผัสเหล่านี้จะไหลในทิศทางตรงกันข้าม ดังนั้นทิศทางการหมุนจะยังคงเหมือนเดิม ในกรณีนี้ การหมุนอย่างราบรื่นจะไม่ทำงาน เพื่อให้ได้เอฟเฟกต์นี้เป็นเรื่องปกติที่จะใช้เฟรมหลายโหล
อุปกรณ์
มอเตอร์สะสมมักจะประกอบด้วยโรเตอร์ (กระดอง), สเตเตอร์, แปรงถ่าน และเครื่องกำเนิดความเร็วรอบ:
- โรเตอร์เป็นส่วนที่หมุนได้ สเตเตอร์ เป็นแม่เหล็กภายนอก
- แปรงกราไฟท์- นี่คือส่วนหลักของหน้าสัมผัสแบบเลื่อนซึ่งใช้แรงดันไฟฟ้ากับกระดองหมุน
- เครื่องกำเนิดความเร็วรอบเป็นอุปกรณ์ที่ใช้ตรวจสอบลักษณะการหมุน ในกรณีที่มีการละเมิดความสม่ำเสมอของการเคลื่อนไหว มันจะแก้ไขแรงดันไฟฟ้าที่จ่ายให้กับเครื่องยนต์ ซึ่งจะทำให้เครื่องยนต์เดินเรียบขึ้น
- สเตเตอร์อาจมีแม่เหล็กมากกว่า 1 อัน เช่น 2 อัน (ขั้ว 2 คู่) นอกจากนี้ยังสามารถใช้ขดลวดแม่เหล็กไฟฟ้าแทนแม่เหล็กสถิตย์ได้ที่นี่ มอเตอร์ดังกล่าวสามารถทำงานได้ทั้งจากกระแสตรงและกระแสสลับ
ความง่ายในการปรับความเร็วของมอเตอร์ตัวสะสมนั้นพิจารณาจากข้อเท็จจริงที่ว่าความเร็วในการหมุนนั้นขึ้นอยู่กับขนาดของแรงดันไฟฟ้าที่ใช้
นอกจากนี้ คุณสมบัติที่สำคัญคือสามารถติดแกนการหมุนเข้ากับเครื่องมือหมุนได้โดยตรงโดยไม่ต้องใช้กลไกระดับกลาง
หากเราพูดถึงการจำแนกประเภท เราสามารถพูดถึง:
- เครื่องยนต์สะสมกระแสตรง.
- เครื่องยนต์สะสมกระแสสลับ.
ในกรณีนี้เรากำลังพูดถึงสิ่งที่มอเตอร์ไฟฟ้าขับเคลื่อนด้วยกระแสไฟฟ้า
การจำแนกประเภทสามารถทำได้ตามหลักการของการกระตุ้นด้วยมอเตอร์ ในอุปกรณ์คอลเลคเตอร์มอเตอร์ พลังงานไฟฟ้าจะถูกส่งไปยังทั้งโรเตอร์และสเตเตอร์ของมอเตอร์ (หากใช้แม่เหล็กไฟฟ้า)
ความแตกต่างคือวิธีการจัดระเบียบการเชื่อมต่อเหล่านี้
นี่เป็นธรรมเนียมที่จะต้องแยกแยะ:
- ความตื่นเต้นแบบคู่ขนาน
- ความตื่นตัวที่สม่ำเสมอ
- การกระตุ้นแบบอนุกรมขนาน
การปรับ
ตอนนี้เรามาพูดถึงวิธีปรับความเร็ว มอเตอร์สับเปลี่ยน. เนื่องจากความเร็วของการหมุนของมอเตอร์นั้นขึ้นอยู่กับปริมาณของแรงดันไฟฟ้าที่ใช้ ดังนั้นวิธีการปรับใด ๆ ที่สามารถทำหน้าที่นี้จึงค่อนข้างเหมาะสมสำหรับสิ่งนี้
นี่คือตัวอย่างบางส่วนของตัวเลือกดังกล่าว:
- หม้อแปลงอัตโนมัติในห้องปฏิบัติการ(ล.ท.).
- บอร์ดปรับตั้งจากโรงงานใช้ในเครื่องใช้ในครัวเรือน (คุณสามารถใช้โดยเฉพาะที่ใช้ในเครื่องผสมหรือเครื่องดูดฝุ่น)
- ปุ่มใช้ในการออกแบบเครื่องมือไฟฟ้า
- หน่วยงานกำกับดูแลในครัวเรือนแสงสว่างพร้อมการเคลื่อนไหวที่ราบรื่น
อย่างไรก็ตาม วิธีการทั้งหมดข้างต้นมีข้อบกพร่องที่สำคัญมาก นอกจากความเร็วที่ลดลงแล้ว พลังของมอเตอร์ยังลดลงอีกด้วย ในบางกรณีสามารถหยุดได้ด้วยมือเพียงข้างเดียว ในบางกรณีอาจยอมรับได้ แต่ ส่วนใหญ่นี่เป็นอุปสรรค์สำคัญ
ตัวเลือกที่ดีคือการควบคุมความเร็วโดยใช้เครื่องสร้างความเร็วรอบโดยปกติจะติดตั้งที่โรงงาน ในกรณีที่ความเร็วมอเตอร์เบี่ยงเบน แหล่งจ่ายไฟที่แก้ไขแล้วซึ่งสอดคล้องกับความเร็วที่ต้องการจะถูกส่งไปยังมอเตอร์ หากมีการสร้างตัวควบคุมการหมุนของมอเตอร์ในวงจรนี้ จะไม่มีการสูญเสียพลังงานที่นี่
มันมีลักษณะอย่างไรในเชิงสร้างสรรค์? การปรับการหมุนแบบรีโอสแตตที่พบมากที่สุดและทำขึ้นจากการใช้เซมิคอนดักเตอร์
ในกรณีแรก เรากำลังพูดถึงความต้านทานแปรผันพร้อมการปรับเชิงกล ต่ออนุกรมกับมอเตอร์คอลเลกเตอร์ ข้อเสียคือการสร้างความร้อนเพิ่มเติมและการสิ้นเปลืองแบตเตอรี่เพิ่มเติม การปรับด้วยวิธีนี้จะทำให้สูญเสียกำลังการหมุนของมอเตอร์ เป็นโซลูชั่นราคาถูก. ไม่สามารถใช้ได้กับมอเตอร์ที่มีกำลังเพียงพอด้วยเหตุผลที่กล่าวถึง
ในกรณีที่สอง เมื่อใช้เซมิคอนดักเตอร์ มอเตอร์จะถูกควบคุมโดยใช้แรงกระตุ้นบางอย่าง วงจรสามารถเปลี่ยนระยะเวลาของพัลส์ดังกล่าวได้ ซึ่งจะเปลี่ยนความเร็วในการหมุนโดยไม่สูญเสียพลังงาน
วิธีการทำด้วยมือของคุณเอง?
มีอยู่ ตัวเลือกต่างๆแผนการควบคุม ลองมาดูรายละเอียดเพิ่มเติมหนึ่งในนั้น
นี่คือรูปแบบการทำงานของเขา:
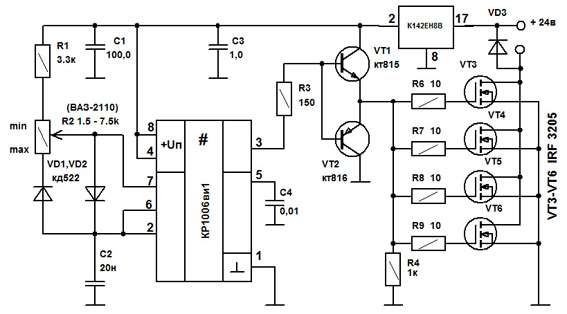
ในขั้นต้นอุปกรณ์นี้ได้รับการพัฒนาเพื่อปรับมอเตอร์ไฟฟ้าของรถยนต์ไฟฟ้า มันเป็นประมาณหนึ่งที่แรงดันไฟฟ้าของแหล่งจ่ายคือ 24 V แต่การออกแบบนี้ใช้ได้กับมอเตอร์อื่น
จุดอ่อนของวงจรซึ่งพิจารณาระหว่างการทดสอบการทำงานของวงจรคือความเหมาะสมต่ำที่กระแสสูงมาก นี่เป็นเพราะการชะลอตัวในการทำงานขององค์ประกอบทรานซิสเตอร์ของวงจร
ขอแนะนำว่ากระแสไม่ควรเกิน 70 A ไม่มีการป้องกันกระแสและอุณหภูมิในวงจรนี้ ดังนั้นจึงแนะนำให้สร้างแอมมิเตอร์และตรวจสอบกระแสด้วยสายตา ความถี่การสลับจะเป็น 5 kHz ซึ่งกำหนดโดยตัวเก็บประจุ 20 nF C2
โดยการเปลี่ยนความแรงของกระแส ความถี่นี้สามารถเปลี่ยนได้ระหว่าง 3 kHz และ 5 kHz ตัวต้านทานปรับค่าได้ R2 ใช้เพื่อควบคุมกระแส เมื่อใช้มอเตอร์ไฟฟ้าในสภาพแวดล้อมภายในบ้าน ขอแนะนำให้ใช้เรกูเลเตอร์แบบมาตรฐาน
ในเวลาเดียวกัน ขอแนะนำให้เลือกค่า R1 เพื่อปรับการทำงานของตัวควบคุมให้ถูกต้อง จากเอาต์พุตของไมโครเซอร์กิตพัลส์ควบคุมจะถูกส่งไปยังแอมพลิฟายเออร์แบบพุชพูลโดยใช้ทรานซิสเตอร์ KT815 และ KT816 จากนั้นไปที่ทรานซิสเตอร์
แผงวงจรพิมพ์มีขนาด 50 x 50 มม. และทำจากไฟเบอร์กลาสด้านเดียว:

ในแผนภาพนี้มีการระบุตัวต้านทาน 45 โอห์ม 2 ตัวเพิ่มเติม สิ่งนี้ทำเพื่อเชื่อมต่อพัดลมคอมพิวเตอร์ทั่วไปเพื่อทำให้อุปกรณ์เย็นลง เมื่อใช้มอเตอร์ไฟฟ้าเป็นโหลดจำเป็นต้องบล็อกวงจรด้วยไดโอดบล็อก (snubber) ซึ่งตามลักษณะของมันสอดคล้องกับค่าสองเท่าของกระแสโหลดและค่าสองเท่าของแรงดันไฟฟ้า
การทำงานของอุปกรณ์ในกรณีที่ไม่มีไดโอดอาจทำให้เกิดความเสียหายเนื่องจากความร้อนสูงเกินไปในกรณีนี้จำเป็นต้องวางไดโอดบนแผ่นระบายความร้อน ในการทำเช่นนี้คุณสามารถใช้แผ่นโลหะซึ่งมีพื้นที่ 30 ซม. 2
การควบคุมคีย์ทำงานในลักษณะที่การสูญเสียพลังงานจากคีย์นั้นค่อนข้างน้อย ในวงจรเดิมใช้พัดลมคอมพิวเตอร์มาตรฐาน ในการเชื่อมต่อจะใช้ความต้านทาน จำกัด 100 โอห์มและแรงดันไฟฟ้า 24 V
อุปกรณ์ประกอบมีลักษณะดังนี้:


เมื่อผลิตหน่วยพลังงาน (ในรูปด้านล่าง) จะต้องเชื่อมต่อสายไฟในลักษณะที่ตัวนำเหล่านี้ผ่านโค้งน้อยที่สุดเราจะเห็นว่าการผลิตอุปกรณ์ดังกล่าวต้องใช้ความรู้ระดับมืออาชีพบางอย่าง และทักษะ บางทีในบางกรณีการใช้อุปกรณ์ที่ซื้อมาก็สมเหตุสมผล
เกณฑ์การคัดเลือกและค่าใช้จ่าย
ในการเลือกประเภทตัวควบคุมที่เหมาะสมที่สุดอย่างถูกต้องคุณต้องมีความคิดที่ดีว่าอุปกรณ์ดังกล่าวมีกี่ประเภท:
- การควบคุมประเภทต่างๆสามารถเป็นระบบควบคุมเวกเตอร์หรือสเกลาร์ อดีตใช้บ่อยกว่าในขณะที่หลังถือว่าเชื่อถือได้มากกว่า
- ตัวควบคุมพลังงานควรสอดคล้องกับกำลังสูงสุดของมอเตอร์
- โดยแรงดันไฟฟ้าสะดวกในการเลือกอุปกรณ์ที่มีคุณสมบัติหลากหลายที่สุด
- ลักษณะความถี่เรกูเลเตอร์ที่เหมาะกับคุณน่าจะตรงใจที่สุด ความถี่สูงที่มอเตอร์ใช้
- ลักษณะอื่นๆ.ในที่นี้เรากำลังพูดถึงขนาดของระยะเวลาการรับประกัน ขนาด และลักษณะอื่นๆ
ราคาสำหรับผู้ควบคุมอาจแตกต่างกันไปขึ้นอยู่กับวัตถุประสงค์และคุณสมบัติของผู้บริโภค
ส่วนใหญ่อยู่ในช่วงประมาณ 3.5 พันรูเบิลถึง 9,000:
- ตัวควบคุมความเร็ว KA-18 ESCออกแบบมาสำหรับโมเดลขนาด 1:10 มีค่าใช้จ่าย 6890 รูเบิล
- ตัวควบคุมความเร็ว MEGAนักสะสม (กันน้ำ) มีค่าใช้จ่าย 3605 รูเบิล
- ตัวควบคุมความเร็วสำหรับรุ่น LaTrax 1:18ราคาของมันคือ 5690 รูเบิล
ด้วยกลไกง่าย ๆ สะดวกในการติดตั้งตัวควบคุมกระแสแบบอะนาล็อก ตัวอย่างเช่นพวกเขาสามารถเปลี่ยนความเร็วของการหมุนของเพลามอเตอร์ได้ จากด้านเทคนิคคุณสามารถสร้างตัวควบคุมได้ง่าย (คุณจะต้องติดตั้งทรานซิสเตอร์หนึ่งตัว) ใช้สำหรับปรับความเร็วอิสระของมอเตอร์ในหุ่นยนต์และอุปกรณ์จ่ายไฟ หน่วยงานกำกับดูแลที่พบมากที่สุดสองประเภท ได้แก่ ช่องสัญญาณเดียวและช่องสัญญาณคู่
วิดีโอ #1.ตัวควบคุมแชนเนลเดียวกำลังทำงาน เปลี่ยนความเร็วของการหมุนของเพลามอเตอร์โดยหมุนปุ่มของตัวต้านทานปรับค่าได้
วิดีโอ #2. เพิ่มความเร็วในการหมุนของเพลามอเตอร์ระหว่างการทำงานของตัวควบคุมช่องสัญญาณเดียว จำนวนรอบที่เพิ่มขึ้นจากค่าต่ำสุดถึงค่าสูงสุดเมื่อหมุนปุ่มตัวต้านทานปรับค่าได้
วิดีโอหมายเลข 3ตัวควบคุมช่องสัญญาณคู่กำลังทำงาน การตั้งค่าความเร็วในการหมุนของเพลามอเตอร์โดยอิสระตามตัวต้านทานการปรับแต่ง
วิดีโอหมายเลข 4 แรงดันไฟฟ้าที่เอาต์พุตของเรกูเลเตอร์วัดด้วยดิจิตอลมัลติมิเตอร์ ค่าที่ได้จะเท่ากับแรงดันแบตเตอรี่ซึ่งลบออก 0.6 โวลต์ (ความแตกต่างเกิดขึ้นเนื่องจากแรงดันตกคร่อมทางแยกทรานซิสเตอร์) เมื่อใช้แบตเตอรี่ 9.55 โวลต์ การเปลี่ยนแปลงจาก 0 ถึง 8.9 โวลต์จะถูกบันทึก
หน้าที่และลักษณะสำคัญ
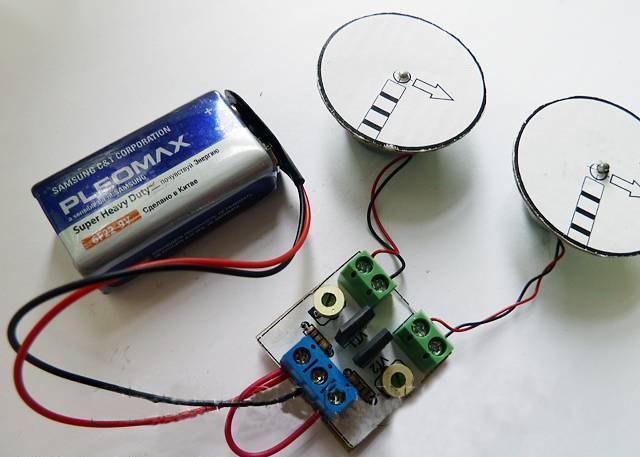
กระแสโหลดของตัวควบคุมช่องสัญญาณเดียว (ภาพถ่าย 1) และสองช่องสัญญาณ (ภาพถ่าย 2) ไม่เกิน 1.5 A ดังนั้นเพื่อเพิ่มความสามารถในการรับน้ำหนักทรานซิสเตอร์ KT815A จะถูกแทนที่ด้วยทรานซิสเตอร์ KT972A หมายเลขพินสำหรับทรานซิสเตอร์เหล่านี้เหมือนกัน (e-k-b) แต่รุ่น KT972A ใช้งานได้กับกระแสสูงสุด 4A
ตัวควบคุมมอเตอร์ช่องทางเดียว
อุปกรณ์ควบคุมมอเตอร์หนึ่งตัวขับเคลื่อนด้วยแรงดันไฟฟ้าในช่วง 2 ถึง 12 โวลต์
การออกแบบอุปกรณ์
องค์ประกอบการออกแบบหลักของตัวควบคุมแสดงในรูปภาพ 3. อุปกรณ์ประกอบด้วยห้าส่วนประกอบ: ตัวต้านทานสองตัว ความต้านทานตัวแปรมีความต้านทาน 10 kOhm (หมายเลข 1) และ 1 kOhm (หมายเลข 2) ทรานซิสเตอร์รุ่น KT815A (หมายเลข 3) ชุดขั้วต่อเทอร์มินัลแบบสกรู 2 ส่วนสำหรับเอาต์พุตสำหรับต่อมอเตอร์ (หมายเลข 4 ) และช่องต่อแบตเตอรี่ (หมายเลข 5)
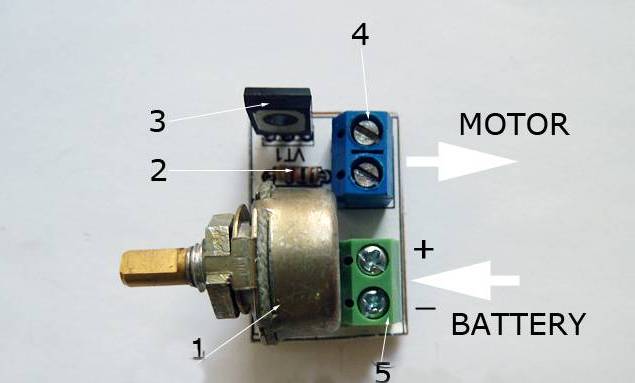
หมายเหตุ 1. ไม่จำเป็นต้องใช้ขั้วต่อสกรู ด้วยความช่วยเหลือของการติดตั้งลวดควั่นแบบบาง คุณสามารถเชื่อมต่อมอเตอร์และแหล่งจ่ายไฟได้โดยตรง
หลักการทำงาน
ขั้นตอนการทำงานของตัวควบคุมมอเตอร์อธิบายไว้ในแผนภาพการเดินสายไฟ (รูปที่ 1) โดยคำนึงถึงขั้วไฟฟ้า ตัวเชื่อมต่อ XT1 นั้นให้มา แรงดันคงที่. หลอดไฟหรือมอเตอร์เชื่อมต่อกับขั้วต่อ XT2 ที่อินพุต ตัวต้านทานปรับค่าได้ R1 เปิดอยู่ การหมุนของปุ่มหมุนจะเปลี่ยนศักย์ไฟฟ้าที่เอาต์พุตตรงกลางซึ่งตรงข้ามกับขั้วลบของแบตเตอรี่ ผ่านตัว จำกัด กระแส R2 เอาต์พุตตรงกลางเชื่อมต่อกับเอาต์พุตฐานของทรานซิสเตอร์ VT1 ในกรณีนี้ทรานซิสเตอร์เชื่อมต่อตามวงจรกระแสปกติ ศักยภาพด้านบวกที่เอาต์พุตฐานจะเพิ่มขึ้นโดยการเลื่อนเอาต์พุตตรงกลางขึ้นจากการหมุนอย่างราบรื่นของปุ่มตัวต้านทานปรับค่าได้ มีกระแสเพิ่มขึ้นซึ่งเป็นผลมาจากการลดลงของความต้านทานของชุมทางตัวรวบรวมและอิมิตเตอร์ในทรานซิสเตอร์ VT1 ศักยภาพจะลดลงหากสถานการณ์พลิกกลับ
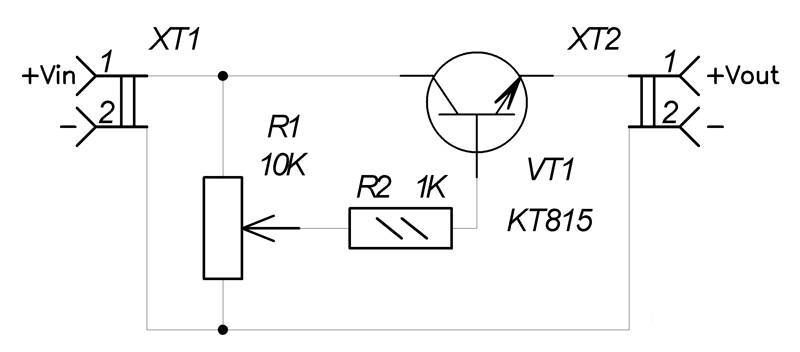
แผนภูมิวงจรรวม
วัสดุและรายละเอียด
ต้องใช้แผงวงจรพิมพ์ขนาด 20x30 มม. ซึ่งทำจากแผ่นไฟเบอร์กลาสเคลือบด้านหนึ่ง (ความหนาที่อนุญาต 1-1.5 มม.) ตารางที่ 1 แสดงส่วนประกอบวิทยุ
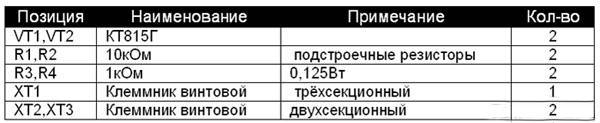
โน้ต 2. ตัวต้านทานแบบปรับค่าได้ที่จำเป็นสำหรับอุปกรณ์อาจเป็นของการผลิตใด ๆ สิ่งสำคัญคือต้องสังเกตค่าความต้านทานปัจจุบันตามที่ระบุไว้ในตารางที่ 1
หมายเหตุ 3. ในการปรับกระแสให้สูงกว่า 1.5A ทรานซิสเตอร์ KT815G จะถูกแทนที่ด้วย KT972A ที่ทรงพลังกว่า (พร้อม กระแสไฟสูงสุด 4A). ในกรณีนี้ ไม่จำเป็นต้องเปลี่ยนรูปแบบแผงวงจรพิมพ์ เนื่องจากการกำหนดพินสำหรับทรานซิสเตอร์ทั้งสองเหมือนกัน
ขั้นตอนการประกอบ
สำหรับงานต่อไป คุณต้องดาวน์โหลดไฟล์เก็บถาวรที่อยู่ท้ายบทความ เปิดเครื่องรูดและพิมพ์ ภาพวาดของเรกูเลเตอร์จะพิมพ์บนกระดาษมัน (ไฟล์) และภาพวาดการติดตั้ง (ไฟล์) จะพิมพ์บนแผ่นสำนักงานสีขาว (รูปแบบ A4)
ถัดไปภาพวาดของแผงวงจร (หมายเลข 1 ในรูปภาพ 4) ติดอยู่กับแทร็กที่มีกระแสไฟ ฝั่งตรงข้ามแผงวงจรพิมพ์ (หมายเลข 2 ในภาพที่ 4) จำเป็นต้องเจาะรู (หมายเลข 3 ในรูปภาพ 14) บนภาพวาดการติดตั้งในที่นั่ง ภาพวาดการประกอบติดอยู่กับแผงวงจรพิมพ์ด้วยกาวแห้งในขณะที่รูต้องตรงกัน ภาพที่ 5 แสดงพินเอาท์ของทรานซิสเตอร์ KT815 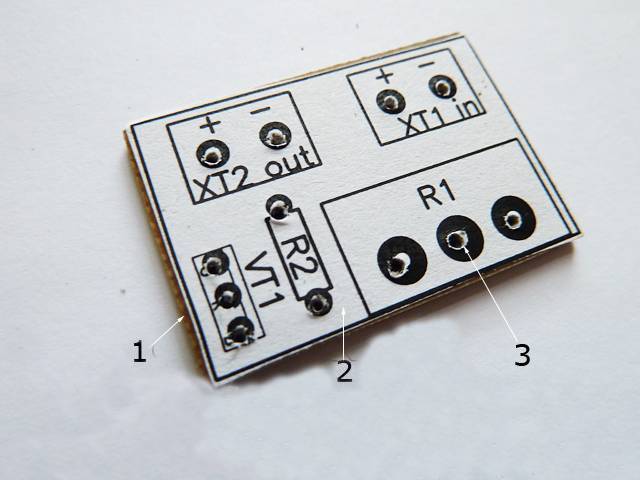

อินพุตและเอาท์พุตของขั้วต่อเทอร์มินัลบล็อกเป็นสีขาว แหล่งจ่ายแรงดันไฟฟ้าเชื่อมต่อกับแผงขั้วต่อผ่านคลิป ตัวควบคุมแชนเนลเดียวที่ประกอบอย่างสมบูรณ์แสดงในรูปภาพ แหล่งจ่ายไฟ (แบตเตอรี่ 9 โวลต์) เชื่อมต่ออยู่ที่ขั้นตอนสุดท้ายของการประกอบ ตอนนี้คุณสามารถปรับความเร็วของการหมุนของเพลาโดยใช้มอเตอร์ได้ โดยคุณจะต้องหมุนปุ่มปรับค่าความต้านทานแบบปรับค่าได้อย่างราบรื่น


ในการทดสอบอุปกรณ์ คุณต้องพิมพ์ภาพวาดดิสก์จากไฟล์เก็บถาวร ถัดไปคุณต้องติดภาพวาดนี้ (หมายเลข 1) บนกระดาษแข็งหนาและบาง (หมายเลข 2) จากนั้นใช้กรรไกรตัดดิสก์ (หมายเลข 3) ออก
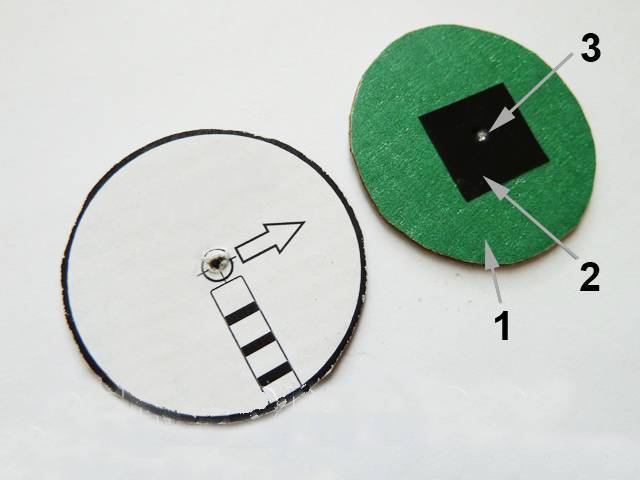
ชิ้นงานที่ได้จะถูกพลิกกลับด้าน (หมายเลข 1) และติดเทปไฟฟ้าสีดำสี่เหลี่ยม (หมายเลข 2) ไว้ที่กึ่งกลางเพื่อให้พื้นผิวของเพลามอเตอร์ยึดเกาะกับดิสก์ได้ดีขึ้น คุณต้องสร้างรู (หมายเลข 3) ตามที่แสดงในภาพ จากนั้นติดตั้งดิสก์บนเพลามอเตอร์และคุณสามารถเริ่มการทดสอบได้ ตัวควบคุมมอเตอร์ช่องทางเดียวพร้อมแล้ว!
ตัวควบคุมมอเตอร์ช่องสัญญาณคู่
ใช้เพื่อควบคุมมอเตอร์คู่หนึ่งอย่างอิสระในเวลาเดียวกัน จ่ายไฟจากแรงดันไฟฟ้าในช่วง 2 ถึง 12 โวลต์ กระแสโหลดได้รับการจัดอันดับสูงถึง 1.5A ต่อช่องสัญญาณ
- การออกแบบอุปกรณ์
ส่วนประกอบหลักของการออกแบบแสดงในภาพที่ 10 และประกอบด้วย: ทริมเมอร์สองตัวสำหรับปรับช่องที่ 2 (หมายเลข 1) และช่องที่ 1 (หมายเลข 2) แผงขั้วต่อสกรูสองส่วนสามส่วนสำหรับส่งออกไปยังมอเตอร์ตัวที่ 2 (หมายเลข 3) สำหรับทางออกไปมอเตอร์ที่ 1 (หมายเลข 4) และสำหรับทางเข้า (หมายเลข 5)
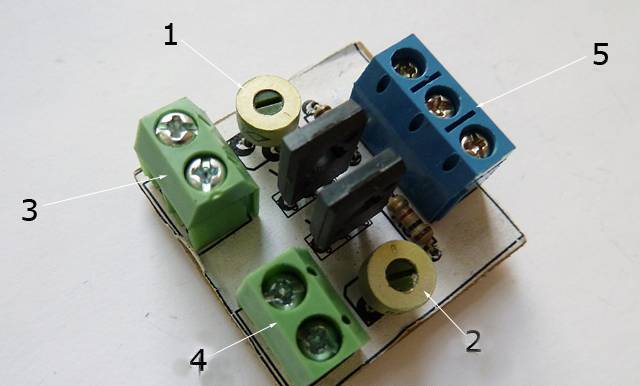
หมายเหตุ 1 การติดตั้งขั้วต่อสกรูเป็นทางเลือก ด้วยความช่วยเหลือของการติดตั้งลวดควั่นแบบบาง คุณสามารถเชื่อมต่อมอเตอร์และแหล่งจ่ายไฟได้โดยตรง
หลักการทำงาน
วงจรของตัวควบคุมสองช่องสัญญาณเหมือนกัน แผนภาพการเดินสายตัวควบคุมช่องสัญญาณเดียว ประกอบด้วยสองส่วน (รูปที่ 2) ความแตกต่างที่สำคัญ: ตัวต้านทานความต้านทานแบบปรับค่าได้จะถูกแทนที่ด้วยตัวต้านทานแบบปรับค่า ความเร็วในการหมุนของเพลาถูกกำหนดล่วงหน้า 
โน้ต 2. ในการปรับความเร็วของการหมุนของมอเตอร์อย่างรวดเร็วตัวต้านทานการปรับแต่งจะถูกแทนที่ด้วยสายยึดที่มีตัวต้านทานแบบปรับค่าได้พร้อมค่าความต้านทานที่ระบุในแผนภาพ
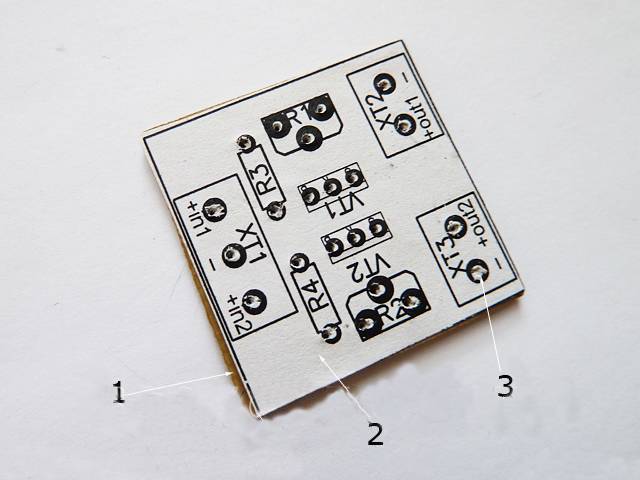
วัสดุและรายละเอียด
คุณจะต้องใช้แผ่นวงจรพิมพ์ขนาด 30x30 มม. ทำจากแผ่นไฟเบอร์กลาสเคลือบด้านหนึ่งหนา 1-1.5 มม. ตารางที่ 2 แสดงส่วนประกอบวิทยุ

ขั้นตอนการประกอบ
หลังจากดาวน์โหลดไฟล์เก็บถาวรซึ่งอยู่ที่ส่วนท้ายของบทความ คุณต้องเปิดเครื่องรูดและพิมพ์ออกมา ภาพวาดของตัวควบคุมสำหรับการถ่ายโอนความร้อน (ไฟล์ termo2) พิมพ์บนกระดาษมัน และภาพวาดการติดตั้ง (ไฟล์ montag2) พิมพ์บนแผ่นสำนักงานสีขาว (รูปแบบ A4)
ภาพวาดแผงวงจรติดอยู่กับรางนำกระแสไฟฟ้าที่ด้านตรงข้ามของแผงวงจรพิมพ์ รูถูกสร้างขึ้นบนภาพวาดการติดตั้งในที่นั่ง ภาพวาดการประกอบติดอยู่กับแผงวงจรพิมพ์ด้วยกาวแห้งในขณะที่รูต้องตรงกัน กำลังสร้าง pinout ของทรานซิสเตอร์ KT815 ในการตรวจสอบ ให้เชื่อมต่ออินพุต 1 และ 2 ชั่วคราวด้วยสายสำหรับติดตั้ง
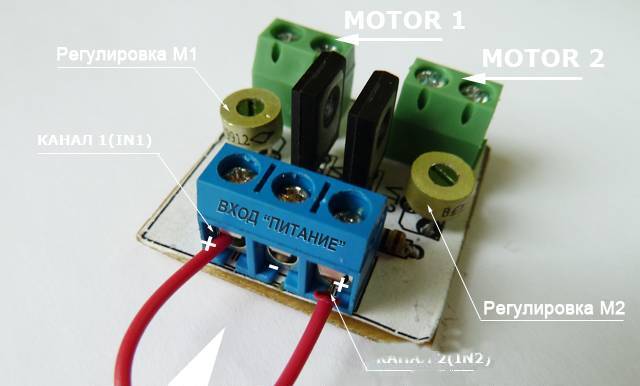
อินพุตใดๆ เชื่อมต่อกับขั้วแหล่งจ่ายไฟ (ตัวอย่างแสดงแบตเตอรี่ 9 โวลต์) ขั้วลบของแหล่งพลังงานติดอยู่ที่กึ่งกลางของแผงขั้วต่อ สิ่งสำคัญที่ต้องจำไว้: สายสีดำคือ "-" และสายสีแดงคือ "+"
ต้องเชื่อมต่อมอเตอร์กับแผงขั้วต่อสองชุด และจำเป็นต้องติดตั้งด้วย ความเร็วที่ต้องการ. หลังจากการทดสอบสำเร็จ คุณต้องถอดการเชื่อมต่อชั่วคราวของอินพุตและติดตั้งอุปกรณ์ในโมเดลหุ่นยนต์ ตัวควบคุมมอเตอร์สองช่องพร้อมแล้ว!
ในการนำเสนอโครงร่างและภาพวาดที่จำเป็นสำหรับการทำงาน อิมิตเตอร์ของทรานซิสเตอร์ถูกทำเครื่องหมายด้วยลูกศรสีแดง