เครื่องยนต์อยู่ในขณะนี้ กระแสตรงพบ ประยุกต์กว้างในอุตสาหกรรมต่างๆ มอเตอร์กระแสตรงจะใช้ในการควบคุมความเร็วและแรงบิดที่ราบรื่นและแม่นยำในช่วงกว้าง ในบทความนี้ ผมจะพูดถึงการสร้างชุดควบคุมสำหรับมอเตอร์กระแสตรงที่จะช่วยให้คุณเปลี่ยนความเร็วของเพลามอเตอร์และทำให้ความเร็วคงที่ในระดับหนึ่ง โดยไม่คำนึงถึงภาระบนเพลามอเตอร์
การพัฒนาขึ้นอยู่กับหลักการทำงานของเซอร์โวไดรฟ์ที่มีระบบควบคุมแบบวงเดียว
หน่วยควบคุมประกอบด้วยโหนดต่อไปนี้:
- SIFU (ระบบพัลส์ - การควบคุมเฟส)
- เรกูเลเตอร์
- การป้องกัน
แผนผังไดอะแกรมของไดรฟ์แสดงอยู่ด้านล่าง
ใหญ่ขึ้น
พิจารณาโครงร่างโดยละเอียดยิ่งขึ้น
ดังนั้น SIFU (ระบบควบคุมพัลส์ - เฟส) - แปลงแรงดันไฟฟ้าไซน์ของเครือข่ายเป็นพัลส์รูปสี่เหลี่ยมผืนผ้าหลายชุดไปยังอิเล็กโทรดควบคุมของเพาเวอร์ไทริสเตอร์ เมื่อเปิดชุดควบคุม แรงดันไฟฟ้ากระแสสลับค่า 14-16v จะไปที่วงจรเรียงกระแสแบบบริดจ์ D1 ซึ่งจะถูกแปลงเป็นแรงดันไฟแบบเร้าใจ ซึ่งไม่เพียงแต่ให้พลังงานแก่วงจรเท่านั้น แต่ยังซิงโครไนซ์การทำงานของไดรฟ์ด้วย Diode D2 ป้องกันไม่ให้พัลส์เรียบโดยตัวเก็บประจุ C1 ถัดไปพัลส์จะถูกป้อนไปยัง "ตัวตรวจจับศูนย์" - DA1.1 ซึ่งประกอบบนหนึ่ง op-amp ของไมโครเซอร์กิต LM324 ซึ่งทำงานในโหมดตัวเปรียบเทียบ ในขณะที่ไม่มีพัลส์ แรงดันไฟฟ้าที่อินพุตโดยตรงและอินเวอร์สจะเท่ากันโดยประมาณ และตัวเปรียบเทียบอยู่ในสถานะที่สมดุล เมื่อเฟสผ่าน "0" ที่อินพุตผกผันของตัวเปรียบเทียบ DA1.1 ซึ่งทำหน้าที่เป็น "ตัวตรวจจับศูนย์" พัลส์จะปรากฏขึ้นเพื่อสลับตัวเปรียบเทียบ ซึ่งเป็นผลมาจากการสร้างพัลส์นาฬิกาสี่เหลี่ยมที่ เอาต์พุตของ DA1.1 ระยะเวลาการทำซ้ำซึ่งเชื่อมโยงอย่างแน่นหนากับการบรรจบกันของเฟสผ่าน "0 "
ด้านล่างนี้คือออสซิลโลแกรมที่อธิบายหลักการทำงาน 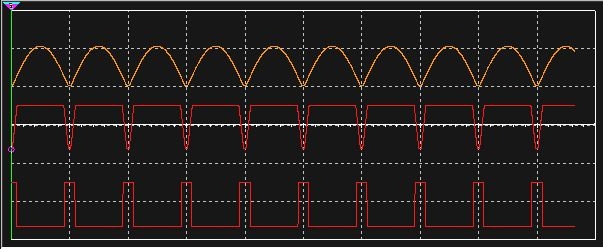
จากบนลงล่าง: CT1, CT2, CT3
วงจรถูกจำลองใน Multisim 11 นี่คือไฟล์โครงการ คุณสามารถดาวน์โหลด รัน และดูว่าโหนดนี้ทำงานอย่างไร
จากนั้นพัลส์นาฬิกาจะถูกส่งไปยังผู้รวมระบบด้วยคีย์ทรานซิสเตอร์ (C4, Q1) ซึ่งจะสร้างแรงดันไฟฟ้าฟันเลื่อย ในขณะที่เฟสผ่าน "0" ชีพจรนาฬิกาจะเปิดทรานซิสเตอร์ Q1 ซึ่งปล่อยตัวเก็บประจุ C4 หลังจากที่พัลส์สลายตัว ทรานซิสเตอร์จะปิดลงและตัวเก็บประจุจะถูกชาร์จจนกว่าพัลส์การซิงค์ครั้งต่อไปจะมาถึง ส่งผลให้คอลเลคเตอร์ Q1 (การสั่น KT4) แรงดันฟันเลื่อยที่เพิ่มขึ้นเป็นเส้นตรงจะถูกสร้างขึ้น ทำให้เสถียรโดยเครื่องกำเนิดกระแสไฟฟ้าที่เสถียรซึ่งสร้างบนทรานซิสเตอร์แบบสนามเอฟเฟกต์ T1 แอมพลิจูดของ "เลื่อย" เท่ากับ 9V ถูกกำหนดโดยตัวต้านทานทริมเมอร์ RP1 แรงดันไฟฟ้า "เลื่อย" จ่ายให้กับอินพุตโดยตรงของตัวเปรียบเทียบ DA1.2
แรงดันอ้างอิงถูกจ่ายให้กับอินพุทผกผันของตัวเปรียบเทียบ DA1.2 และในขณะที่แรงดันฟันเลื่อยเกินค่าแรงดันที่อินเวอร์สอินพุทของตัวเปรียบเทียบ สวิตช์ตัวเปรียบเทียบและพัลส์จะเกิดขึ้นที่เอาต์พุตของตัวเปรียบเทียบ ( ออสซิลเลเตอร์ KT4). พัลส์จะแยกความแตกต่างผ่านสายโซ่ R14, C6 และป้อนไปยังฐานของทรานซิสเตอร์ Q2 ทรานซิสเตอร์เปิดขึ้นและพัลส์ของการเปิดไทริสเตอร์กำลังจะเกิดขึ้นบนหม้อแปลงพัลส์ Tr1 การเพิ่ม (ลด) แรงดันไฟฟ้าของงาน, รอบการทำงานของพัลส์ใน KT5 เปลี่ยนไป
นี่คือรูปคลื่น 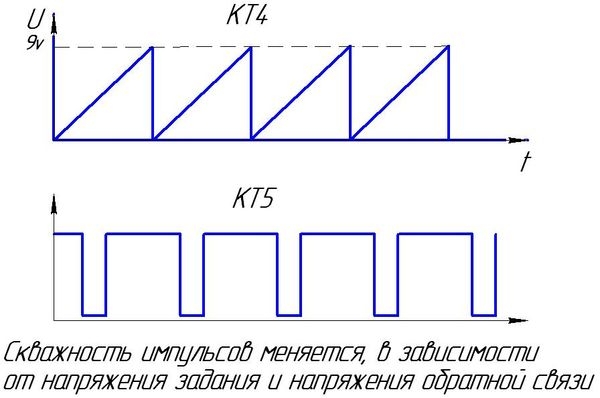
แต่เราจะไม่เห็นแรงกระตุ้นใด ๆ ใน KT5 จนกว่าเราจะกดปุ่ม "เริ่ม" - S1 เมื่อไม่ได้กดปุ่ม แรงดันไฟฟ้าของแหล่งจ่าย + 12V ผ่านหน้าสัมผัสแบบปิดปกติ S1 ตามสายโซ่ R12, D3 จะถูกป้อนไปยังอินพุตผกผัน DA1.2 และเท่ากับประมาณ 11V เนื่องจากแรงดันไฟฟ้านี้เกินแรงดัน "เลื่อย" เท่ากับ 9V ตัวเปรียบเทียบจึงถูกล็อคและพัลส์ควบคุมสำหรับการเปิดไทริสเตอร์จะไม่เกิดขึ้น เพื่อป้องกันอุบัติเหตุและความล้มเหลวของเครื่องยนต์ หากผู้ปฏิบัติงานไม่ได้ตั้งค่าตัวควบคุมความเร็วเป็น "0" วงจรจะจัดเตรียมหน่วยเร่งความเร็ว C5, R13 ซึ่งใช้สำหรับเร่งความเร็วเครื่องยนต์ให้ราบรื่น ในโหมด "เริ่ม" วงจรทำงานดังนี้: เมื่อกดปุ่ม "เริ่ม" หน้าสัมผัสที่ปิดตามปกติจะเปิดขึ้นและตัวเก็บประจุ C5 ตามสายโซ่ - "กราวด์", R13, - C5 เริ่มชาร์จอย่างราบรื่นและแรงดันไฟฟ้า บนแผ่นลบของตัวเก็บประจุค่อยๆมีแนวโน้มเป็นศูนย์ ในเวลาเดียวกัน แรงดันไฟฟ้าที่อินพุทอินพุท DA1.2 จะค่อยๆ เพิ่มขึ้นเป็นค่าที่กำหนดโดยแรงดันอ้างอิง และเครื่องเปรียบเทียบจะเริ่มสร้างพัลส์ควบคุมของพาวเวอร์ไทริสเตอร์ เวลาในการชาร์จถูกกำหนดโดยค่าของ C5, R13 หากในระหว่างการทำงานของเครื่องยนต์จำเป็นต้องเปลี่ยนความเร็วเพื่อหลีกเลี่ยงการเพิ่มความเร็วอย่างกะทันหันวงจรจะมีหน่วย "การเร่งความเร็ว - การชะลอตัว" R21, C8, R22 ด้วยการเพิ่มขึ้น (ลดลง) ในแรงดันอ้างอิง ตัวเก็บประจุ C8 จะถูกชาร์จอย่างราบรื่น (คายประจุ) ซึ่งป้องกัน "ไฟกระชาก" ที่แหลมคมของแรงดันไฟฟ้าที่อินพุตผกผันของเครื่องขยายเสียงและด้วยเหตุนี้จึงทำให้ความเร็วของเครื่องยนต์เพิ่มขึ้นอย่างรวดเร็ว
ตอนนี้เรามาดูกันว่ามันทำงานอย่างไร ตัวควบคุมความเร็ว.
ตัวควบคุมได้รับการออกแบบมาเพื่อรักษาความเร็วของเครื่องยนต์ให้คงที่ในเขตควบคุม ตัวควบคุมเป็นแอมพลิฟายเออร์ดิฟเฟอเรนเชียลที่มีการรวมของแรงดันไฟฟ้าสองตัว: แรงดันอ้างอิงและแรงดันป้อนกลับ แรงดันอ้างอิงถูกกำหนดโดยตัวต้านทาน RP1 และป้อนผ่านตัวกรอง R20, C8, R21 ซึ่งทำหน้าที่ของหน่วย "การเร่ง - การชะลอตัว" พร้อมกันถูกป้อนเข้ากับอินพุตผกผันของตัวควบคุม DA1.3 op-amp ด้วยการเพิ่มแรงดันอ้างอิงที่เอาต์พุตของ op-amp DA1.3 แรงดันเอาต์พุตจะลดลงเป็นเส้นตรง
แรงดันเอาต์พุตของตัวควบคุมถูกป้อนเข้ากับอินพุทผกผันของตัวเปรียบเทียบ SIFU DA1.2 โดยที่เมื่อรวมกับพัลส์แรงดันฟันเลื่อย มันถูกแปลงเป็นชุดของพัลส์รูปสี่เหลี่ยมผืนผ้าไปยังอิเล็กโทรดควบคุมของไทริสเตอร์ ด้วยการเพิ่มขึ้น (ลดลง) ในแรงดันอ้างอิง แรงดันเอาต์พุตที่เอาต์พุตของหน่วยพลังงานก็เพิ่มขึ้น (ลดลง) ด้วย
กราฟนี้แสดงความสัมพันธ์ระหว่างความเร็วของเครื่องยนต์และแรงดันอ้างอิง 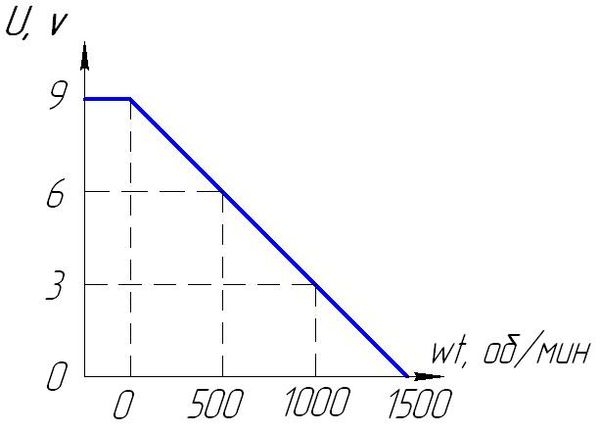
ค่า RPM ของเครื่องยนต์มีให้เป็นตัวอย่าง
ตัวแบ่งแรงดันไฟฟ้า R22, R23 ที่เชื่อมต่อกับอินพุตโดยตรงของตัวควบคุม DA1.3 ทำหน้าที่ป้องกันอุบัติเหตุของเครื่องยนต์เมื่อฟีดแบ็คแตก (เมื่อฟีดแบ็คแตก เครื่องยนต์จะโอเวอร์ไดรฟ์)
เมื่อเปิดใช้งานไดรฟ์ tachogenerator จะเริ่มสร้างแรงดันไฟฟ้าตามสัดส่วนกับความเร็วของเครื่องยนต์ แรงดันไฟฟ้านี้จ่ายให้กับอินพุตของเครื่องตรวจจับความแม่นยำ DA1.4, DA2.1 ที่ประกอบตามวงจรคลื่นเต็ม แรงดันไฟฟ้าที่นำมาจากเอาต์พุตของเครื่องตรวจจับที่แม่นยำ DA1.4, DA2.1 จะถูกป้อนผ่านตัวกรอง C10, R30, R33 ไปยังแอมพลิฟายเออร์มาตราส่วนป้อนกลับ DA2.2 แอมพลิฟายเออร์ทำหน้าที่ปรับแรงดันป้อนกลับที่มาจากเครื่องกำเนิดไฟฟ้า แรงดันไฟฟ้าจากเอาต์พุตของ op-amp DA2.2 ไปที่อินพุตของตัวควบคุม DA1.3 และไปยังวงจรป้องกัน DA2.3
ตัวต้านทาน RP1 กำหนดความเร็วของเครื่องยนต์ เมื่อเครื่องยนต์ทำงานโดยไม่มีโหลด แรงดันไฟที่เอาท์พุตของเครื่องขยายสเกลจะต่ำกว่าแรงดันไฟที่พิน 6 ของ op-amp DA1.3 ≈ +5v ดังนั้นไดรฟ์จึงทำงานเป็นตัวควบคุม เมื่อโหลดบนเพลามอเตอร์เพิ่มขึ้น แรงดันไฟฟ้าที่ได้รับจากเครื่องกำเนิดไฟฟ้ารอบเครื่องยนต์จะลดลง และเป็นผลให้แรงดันไฟฟ้าจากเอาต์พุตของเครื่องขยายเสียงสเกลลดลง
เมื่อแรงดันไฟฟ้านี้น้อยกว่าแรงดันไฟฟ้าที่พิน 5 ของ DU DA1.3 ไดรฟ์จะเข้าสู่โซนการรักษาเสถียรภาพปัจจุบัน การลดแรงดันไฟฟ้าที่อินพุตที่ไม่กลับด้านของ op-amp DA1.3 จะทำให้แรงดันไฟฟ้าที่เอาต์พุตลดลง และเนื่องจากมันทำงานบนแอมพลิฟายเออร์แบบกลับด้าน DA1.2 จึงนำไปสู่มุมเปิดที่ใหญ่ขึ้นของไทริสเตอร์ และส่งผลให้แรงดันไฟฟ้าของกระดองมอเตอร์เพิ่มขึ้น
โครงการป้องกัน
การป้องกันความเร็วเกินได้รับการออกแบบมาเพื่อปกป้องเครื่องยนต์จากอุบัติเหตุในกรณีที่ความเร็วรอบเครื่องยนต์ที่ตั้งไว้เพิ่มขึ้นอย่างรวดเร็ว วงจรประกอบบน op-amp DA2.3 เชื่อมต่อตามวงจรเปรียบเทียบ แรงดันอ้างอิงจะจ่ายให้กับอินพุตผกผันของตัวเปรียบเทียบจากตัวแบ่ง R36, R37, RP3 ตัวต้านทาน RP3 กำหนดเกณฑ์การป้องกัน แรงดันไฟฟ้าจากเอาต์พุตของเครื่องขยายเสียงมาตราส่วน DA2.2 จ่ายให้กับอินพุตโดยตรงของตัวเปรียบเทียบการป้องกัน DA2.3 เมื่อความเร็วของเครื่องยนต์สูงกว่าค่าที่กำหนด แรงดันไฟฟ้าที่อินพุตโดยตรงของตัวเปรียบเทียบจะเกินเกณฑ์ของการตั้งค่าการป้องกันที่กำหนดโดย RP3 - สวิตช์ตัวเปรียบเทียบ เนื่องจากมีการป้อนกลับในเชิงบวกในวงจร R38 ทำให้ตัวเปรียบเทียบ "สแนป" และการมีอยู่ของไดโอด VD12 จะป้องกันไม่ให้ตัวเปรียบเทียบรีเซ็ต เมื่อการป้องกันถูกกระตุ้น แรงดันไฟฟ้าจากเอาต์พุตของตัวเปรียบเทียบการป้องกัน (≈ +11v) ผ่านไดโอด VD14 จะถูกจ่ายให้กับอินพุตผกผัน 13 DA1.2 ของ SIFU และเนื่องจากแรงดันป้องกันเกินแรงดัน "เลื่อย" ( = 9v) มีการห้ามทันทีในการออกพัลส์ควบคุมไปยังอิเล็กโทรดไทริสเตอร์ควบคุม แรงดันไฟฟ้าจากเอาต์พุตของตัวเปรียบเทียบการป้องกัน DA2.3 เปิดทรานซิสเตอร์ VT4 ซึ่งนำไปสู่การทำงานของรีเลย์ P1.1 และการจุดระเบิดของ VL1 LED ส่งสัญญาณฉุกเฉิน คุณสามารถถอดการป้องกันได้โดยการยกเลิกการจ่ายไฟให้ไดรฟ์โดยสมบูรณ์ และหลังจากหยุดชั่วคราว 5-10 วินาที ให้เปิดเครื่องอีกครั้ง
ส่วนกำลังของชุดควบคุม
ไดอะแกรมของส่วนกำลังแสดงอยู่ด้านล่าง 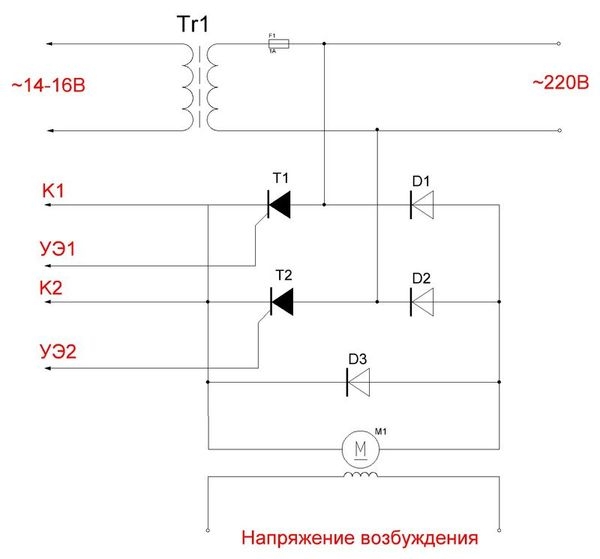
Transformer Tr1 ออกแบบมาเพื่อจ่ายไฟให้กับวงจรหน่วยควบคุม วงจรเรียงกระแสควบคุมถูกประกอบขึ้นตามวงจรสมมาตรครึ่งสะพานและประกอบด้วยไดโอดกำลังสอง D1, D2
และเพาเวอร์ไทริสเตอร์สองตัว T1, T2 และไดโอดป้องกัน D3 ขดลวดกระตุ้นนั้นขับเคลื่อนด้วยตัวมันเอง หม้อแปลงไฟฟ้าแบบแยกส่วนและวงจรเรียงกระแส
หากเครื่องยนต์ไม่มีเครื่องกำเนิดไฟฟ้า tachogenerator ข้อเสนอแนะเพื่อควบคุมความเร็วสามารถทำได้ดังนี้:
1. ใช้หม้อแปลงกระแสที่รวมอยู่ในวงจรจ่ายไฟของวงจรเรียงกระแสควบคุม 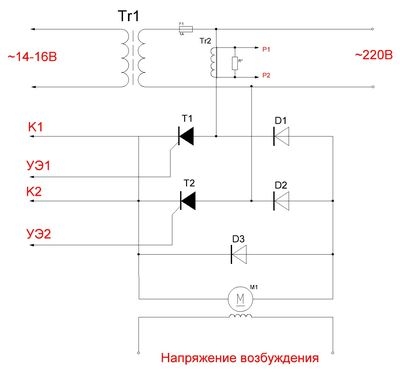
หากใช้หม้อแปลงกระแสให้ใส่จัมเปอร์ P1 บนวงจรชุดควบคุม
ในตำแหน่ง 1-3 สิ่งนี้จำเป็นเพราะเมื่อโหลดเพิ่มขึ้น กระแสอาร์เมเจอร์จะเพิ่มขึ้น ดังนั้น แรงดันไฟที่เอาออกจากหม้อแปลงกระแสจะเพิ่มขึ้นด้วย ดังนั้นแรงดันป้อนกลับจะต้องนำไปใช้กับการกลับด้าน
ชิปเอาต์พุต DA1.3 คุณยังสามารถใส่กระแสไฟมาตรฐานได้ แต่เฉพาะในวงจรกระดองของมอเตอร์หลังจากวงจรเรียงกระแสและลบสัญญาณตอบรับออกจากมัน
2. ใช้เซ็นเซอร์แรงดันกระดอง แผนภาพแสดงด้านล่าง 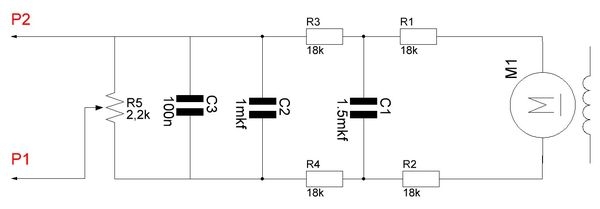
เซ็นเซอร์แรงดันกระดองเป็นตัวแบ่งตัวกรองและเชื่อมต่อโดยตรงกับขั้วของกระดองของมอเตอร์ ไดรฟ์ได้รับการกำหนดค่าดังนี้ ตัวต้านทาน "Reference" และ "Scaling Uoc" ถูกตั้งค่าไว้ที่ตำแหน่งตรงกลาง ตัวต้านทาน R5 ของเซ็นเซอร์แรงดันกระดองถูกนำไปยังตำแหน่งที่ต่ำกว่าไปที่ "กราวด์" เราเปิดไดรฟ์และตั้งแรงดันไฟฟ้าที่กระดองของเครื่องยนต์ประมาณ 110 โวลต์ โดยการควบคุมแรงดันไฟฟ้าที่อาร์มาเจอร์ของมอเตอร์ เราเริ่มหมุนตัวต้านทาน R5 ในช่วงเวลาหนึ่งของการควบคุมแรงดันไฟฟ้าของเกราะจะเริ่มลดลงซึ่งบ่งชี้ว่าข้อเสนอแนะเริ่มทำงานแล้ว
ตอนนี้เรามาดูการออกแบบและการปรับชุดควบคุมกัน
หน่วยควบคุมถูกสร้างขึ้นบนแผงวงจรพิมพ์ (ไฟล์ PCB) 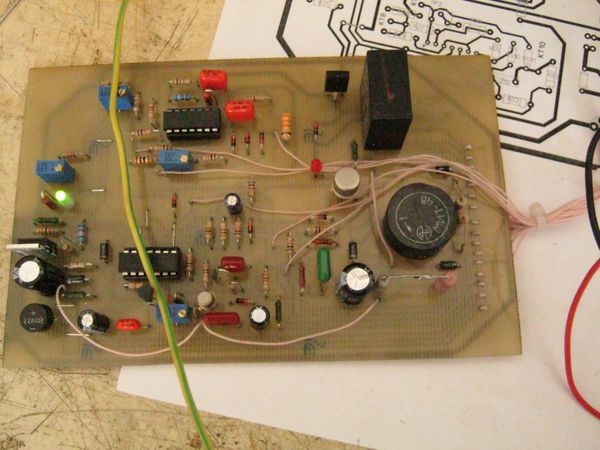
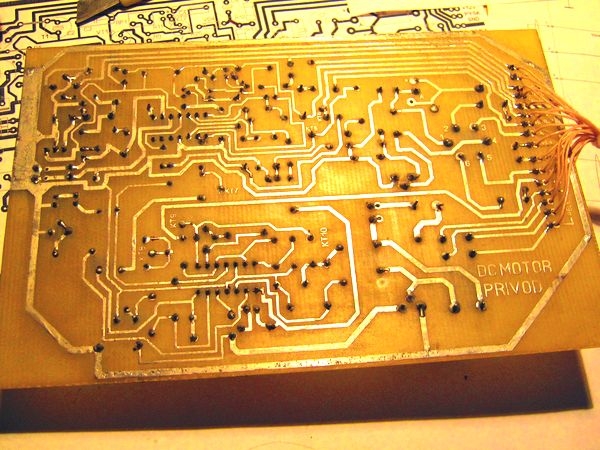
บอร์ดเชื่อมต่อด้วยลวด MGTF กับขั้วต่อเพื่อการถอดประกอบระหว่างการซ่อมแซมได้ง่าย
การตั้งค่า
ในช่วงเวลาของการปรับจูน ชิ้นส่วนกำลังถูกประกอบโดยการติดตั้งบนพื้นผิวและใช้หลอดไส้ธรรมดาเป็นโหลด 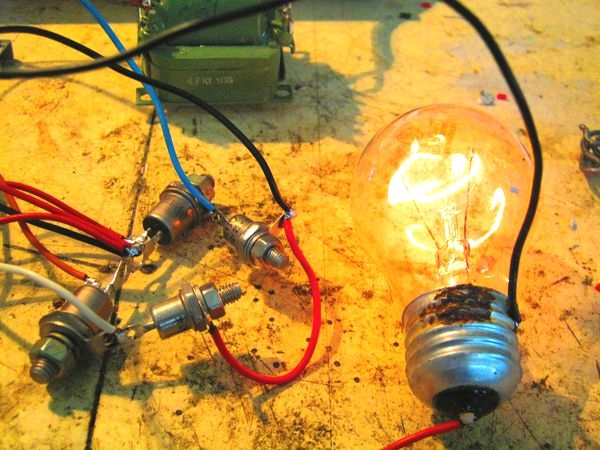
เราเริ่มการปรับโดยการตรวจสอบแรงดันไฟของแหล่งจ่ายและแรงดันไฟของตัวขยายสัญญาณปฏิบัติการ DA1, DA2 ขอแนะนำให้ใส่ไมโครเซอร์กิตในซ็อกเก็ต จากนั้นเราควบคุมออสซิลโลแกรมที่จุดควบคุม CT1, CT2, CT3 (ออสซิลโลแกรมที่จุดเหล่านี้จะได้รับที่จุดเริ่มต้นของคำอธิบายของ SIFU) ตอนนี้เราวางออสซิลโลสโคปไว้ที่จุดควบคุม KT4 ควรมีพัลส์ฟันเลื่อยเช่นเดียวกับในออสซิลโลแกรมด้านบน (ปุ่ม "เริ่ม" ควรเปิดอยู่ในขณะนี้) ด้วยตัวต้านทานทริมเมอร์ RP1 จำเป็นต้องตั้งค่าการแกว่ง "เลื่อย" เป็น 9 โวลต์ซึ่งเป็นจุดสำคัญมากเนื่องจากการทำงานต่อไปของวงจรขึ้นอยู่กับมัน เนื่องจากการแพร่กระจายในพารามิเตอร์ของทรานซิสเตอร์แบบ field-effect อาจมีนัยสำคัญอย่างมาก จึงเป็นไปได้ว่าช่วงการปรับของ RP1 อาจไม่เพียงพอ จากนั้นจึงเลือกค่าของตัวต้านทาน R10 เพื่อให้ได้ช่วงที่ต้องการ ที่จุดควบคุม KT3 ระยะเวลาพัลส์ควรเป็น 1.5 - 1.8 มิลลิวินาที หากไม่เป็นเช่นนั้น ให้เลือกตัวต้านทาน R4 (ในทิศทางที่ลดลง) เพื่อให้ได้ระยะเวลาที่ต้องการ
ด้วยการหมุนตัวควบคุม RR1 ที่จุดควบคุม KT5 ควบคุมการเปลี่ยนแปลงในรอบการทำงานของพัลส์จากค่าสูงสุดจนถึงค่าที่หายไปโดยสมบูรณ์ที่ตำแหน่งด้านล่างของตัวเลื่อน RR1 ในกรณีนี้ ความสว่างของหลอดไฟที่เชื่อมต่อกับชุดจ่ายไฟควรเปลี่ยนไป
ต่อไป เราเชื่อมต่อชุดควบคุมกับเครื่องยนต์และตัวสร้างความเร็วรอบ เราตั้งค่าตัวควบคุม RR1
แรงดันกระดองประมาณ 40-50 โวลต์ ต้องตั้งค่าตัวต้านทาน RP3 ไว้ที่ตำแหน่งตรงกลาง โดยการควบคุมแรงดันไฟฟ้าที่อาร์มาเจอร์ของมอเตอร์ เราจะเริ่มหมุนตัวต้านทาน RP3 ในช่วงเวลาหนึ่งของการควบคุมแรงดันไฟฟ้าของเกราะจะเริ่มลดลงซึ่งบ่งชี้ว่าข้อเสนอแนะเริ่มทำงานแล้ว สำหรับผู้ที่ต้องการทดลอง: เพื่อเพิ่มความแข็งแกร่งของไดรฟ์ คุณยังสามารถเพิ่มความต้านทาน R24 ได้ ซึ่งจะเป็นการเพิ่มเกนของเรกูเลเตอร์ หรือเพิ่มตัวต้านทาน R32
หากใช้กระแสป้อนกลับของกระดองของมอเตอร์
สำหรับสิ่งนี้ดังที่ได้กล่าวไว้ข้างต้นหม้อแปลงกระแสจะรวมอยู่ในวงจรไฟฟ้า
วงจรเรียงกระแสควบคุม วงจรสอบเทียบหม้อแปลงกระแสได้รับด้านล่าง โดยการเลือกตัวต้านทาน ให้รับแรงดันไฟฟ้าสลับ ≈ 2 ÷ 2.5v ที่เอาต์พุตของหม้อแปลง กำลังโหลด RN1 ต้องตรงกับกำลังมอเตอร์ 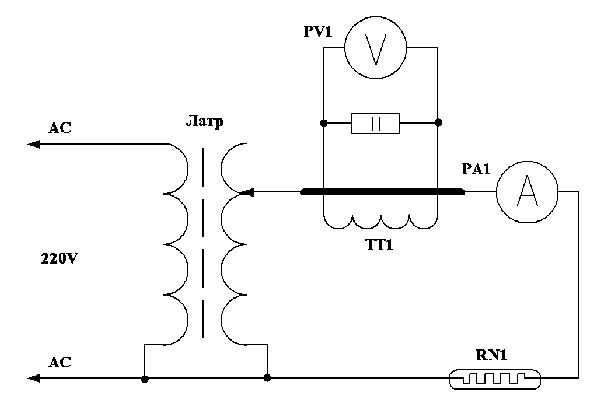
ความสนใจ! อย่าเปิดหม้อแปลงกระแสที่ไม่มีตัวต้านทานโหลด
เราเชื่อมต่อหม้อแปลงกระแสกับวงจรป้อนกลับ P1 และ P2 ในช่วงเวลาของการตั้งค่า "Regulator" ขอแนะนำให้ขายไดโอด D12 เพื่อแยกการทำงานที่ผิดพลาดของการป้องกัน
ออสซิลโลแกรมที่จุดควบคุม KT8, KT9, KT10 ควรเป็นดังรูปด้านล่าง 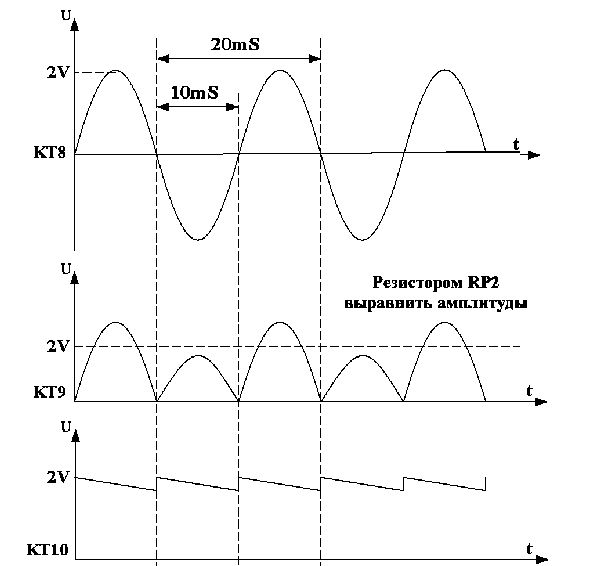
การตั้งค่าเพิ่มเติมจะเหมือนกับในกรณีของการใช้เครื่องกำเนิดความเร็วรอบ
หากใช้การป้อนกลับของแรงดันกระดองของมอเตอร์
ดังที่กล่าวไว้ข้างต้น สามารถใช้การป้อนกลับของแรงดันกระดองได้ สำหรับสิ่งนี้ เซ็นเซอร์แรงดันกระดองถูกประกอบเข้าด้วยกัน ชุดควบคุมได้รับการกำหนดค่าดังนี้ ตัวต้านทาน "Reference" และ "Scaling Uoc" ถูกตั้งค่าไว้ที่ตำแหน่งตรงกลาง ตัวต้านทาน R5 ของเซ็นเซอร์แรงดันกระดองถูกนำไปยังตำแหน่งที่ต่ำกว่าไปที่ "กราวด์" เราเปิดไดรฟ์และตั้งแรงดันไฟฟ้าที่กระดองของเครื่องยนต์ประมาณ 110 โวลต์ โดยการควบคุมแรงดันไฟฟ้าที่อาร์มาเจอร์ของมอเตอร์ เราเริ่มหมุนตัวต้านทาน R5 ในช่วงเวลาหนึ่งของการควบคุมแรงดันไฟฟ้าของเกราะจะเริ่มลดลงซึ่งบ่งชี้ว่าข้อเสนอแนะเริ่มทำงานแล้ว
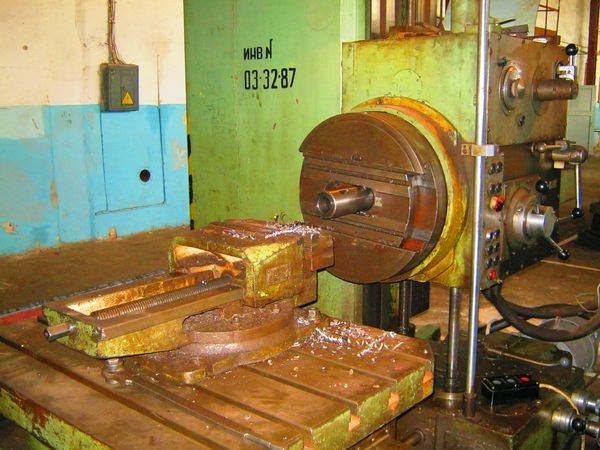
ชุดควบคุมนี้สร้างขึ้นสำหรับเครื่องคว้าน นี่คือรูปถ่ายของสัตว์ประหลาดตัวนี้ 
ในเครื่องนี้ แอมพลิฟายเออร์ของเครื่องจักรไฟฟ้าทำงานล้มเหลว ซึ่งควบคุมมอเตอร์กระแสตรงสำหรับการเคลื่อนย้ายโต๊ะ
นี่คือเพาเวอร์แอมป์ 
แทนที่จะสร้างชุดควบคุมนี้
นี่คือรูปถ่ายของมอเตอร์กระแสตรงนั่นเอง 
ชุดควบคุมถูกประกอบขึ้นบนฐานฉนวนซึ่งวางองค์ประกอบหลักทั้งหมดไว้ 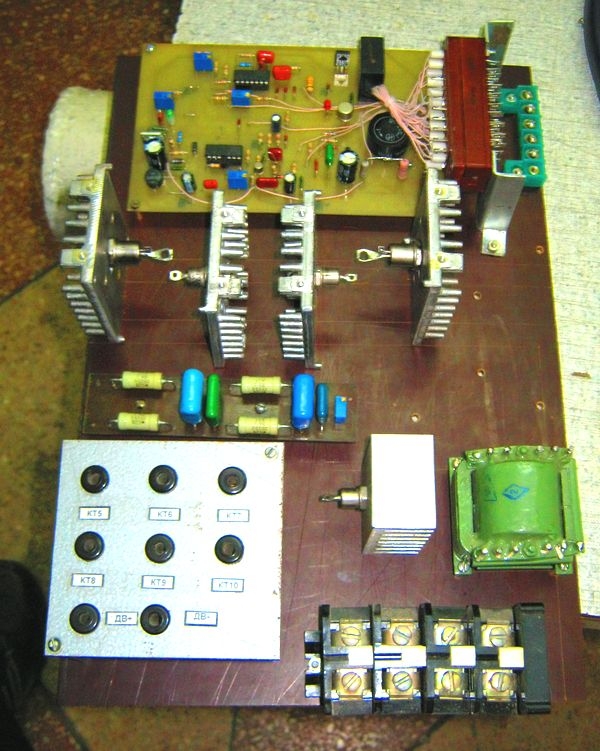
พาวเวอร์ไดโอดและไทริสเตอร์ติดตั้งอยู่บนฮีตซิงก์ แผงที่มีขั้วต่อถูกสร้างขึ้นด้วยซึ่งสัญญาณจากจุดควบคุมของวงจรถูกส่งออก เพื่อความสะดวกในการติดตั้งและซ่อมแซมบนเครื่องโดยตรง
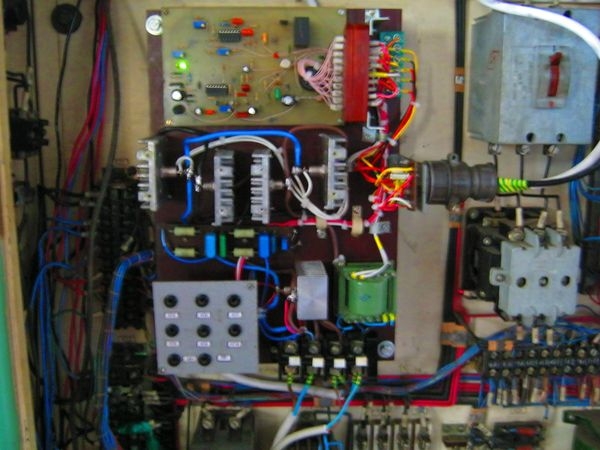
นี่คือชุดควบคุมที่ติดตั้งอยู่ในตู้ไฟของเครื่อง 
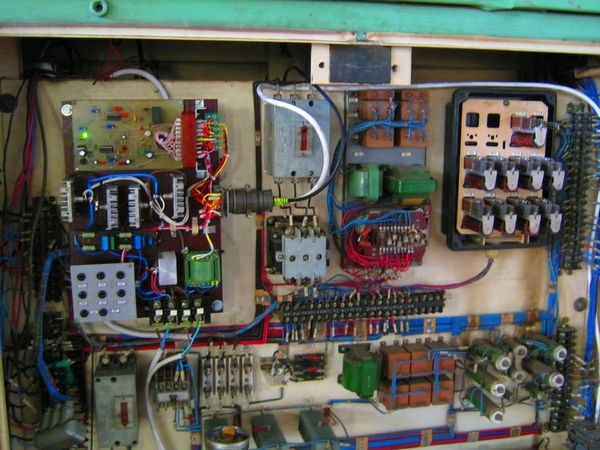
มีการติดตั้งแผงควบคุมขนาดเล็กที่อีกด้านหนึ่งของตู้ไฟ 
มันตั้งอยู่:
- สวิตซ์เปิด-ปิดตัวเครื่อง
- สวิตช์สลับโหมดการทำงาน เนื่องจากสำหรับการปรับการเคลื่อนไหวของโต๊ะเครื่อง จึงไม่จำเป็นต้องมีการควบคุมที่แม่นยำและความเสถียรของการหมุนรอบ ดังนั้นวงจรป้อนกลับจึงถูกปัดทิ้งไป
- ลูกบิดสำหรับปรับจำนวนรอบ มีตัวต้านทานปรับค่าได้ 2 ตัว ตัวหนึ่งสำหรับการปรับแบบหยาบ ตัวที่สองแบบ multi-turn สำหรับการตั้งค่าที่แม่นยำของการหมุนรอบที่ต้องการสำหรับการคว้านหยาบและละเอียดของชิ้นงาน
สำหรับผู้ที่สนใจ ด้านล่างเป็นวิดีโอการทำงานของเครื่อง ขั้นแรก จะแสดงการคว้านรูในแผ่นเหล็กหนา 20 มม. จากนั้นจะแสดงด้วยความถี่ที่สกรูป้อนตารางของเครื่องหมุน ที่ความเร็วนี้ ชิ้นส่วนจะถูกป้อนเข้าสู่เครื่องตัด และความเร็วของสกรูป้อนนี้มีให้โดยมอเตอร์ไฟฟ้ากระแสตรง ซึ่งอันที่จริง ทั้งหมดนี้ทำเสร็จแล้ว
หน่วยควบคุมทำงานได้ดีไม่มีความล้มเหลวหรืออุบัติเหตุ
Volodymyr Rentyuk, Zaporozhye, ยูเครน
บทความให้ รีวิวสั้นๆและการวิเคราะห์วงจรยอดนิยมที่ออกแบบมาเพื่อควบคุมมอเตอร์ DC คอลเลคเตอร์ ตลอดจนโซลูชันวงจรดั้งเดิมและไม่ค่อยมีใครรู้จัก
มอเตอร์ไฟฟ้าอาจเป็นหนึ่งในผลิตภัณฑ์ยอดนิยมของวิศวกรรมไฟฟ้า ตามที่วิกิพีเดียรอบรู้บอกเรา เครื่องยนต์ไฟฟ้า - เครื่องไฟฟ้า(เครื่องแปลงไฟฟ้าเครื่องกล) ซึ่ง พลังงานไฟฟ้าแปลงเป็นเครื่องกล จุดเริ่มต้นของประวัติศาสตร์ถือได้ว่าเป็นการค้นพบที่ไมเคิล ฟาราเดย์สร้างขึ้นในปี พ.ศ. 2364 ทำให้เกิดความเป็นไปได้ที่ตัวนำจะหมุนในสนามแม่เหล็ก แต่มอเตอร์ไฟฟ้าที่ใช้งานได้จริงเครื่องแรกที่มีโรเตอร์หมุนอยู่นั้นรอจนถึงปี 1834 สำหรับการประดิษฐ์ มันถูกคิดค้นโดย Moritz Hermann von Jacobi ซึ่งรู้จักกันดีในชื่อ Boris Semenovich ขณะทำงานในKönigsberg มอเตอร์ไฟฟ้ามีพารามิเตอร์หลักสองประการ ได้แก่ ความเร็วในการหมุนของเพลา (โรเตอร์) และแรงบิดที่พัฒนาขึ้นบนเพลา โดยทั่วไป พารามิเตอร์ทั้งสองนี้ขึ้นอยู่กับแรงดันไฟฟ้าที่จ่ายให้กับมอเตอร์และกระแสในขดลวด ปัจจุบันมีมอเตอร์ไฟฟ้าค่อนข้างหลากหลายและเนื่องจากตัวละครวรรณกรรมที่มีชื่อเสียงของเรา Kozma Prutkov ตั้งข้อสังเกตว่าไม่สามารถยอมรับได้ไม่มีที่สิ้นสุดเราจะพิจารณาคุณสมบัติของการควบคุมมอเตอร์กระแสตรง (ต่อไปนี้จะเรียกว่า มอเตอร์ไฟฟ้า)
มอเตอร์กระแสตรงมีสองประเภท - เหล่านี้เป็นมอเตอร์สับเปลี่ยนที่เราคุ้นเคยและมอเตอร์ไร้แปรงถ่าน (สเต็ปเปอร์) ในช่วงแรก สนามแม่เหล็กไฟฟ้ากระแสสลับซึ่งรับประกันการหมุนของเพลามอเตอร์นั้นเกิดขึ้นจากขดลวดของโรเตอร์ซึ่งขับเคลื่อนผ่านเครื่องสับเปลี่ยนแบบแปรงซึ่งเป็นตัวสะสม มันทำปฏิกิริยากับสนามแม่เหล็กคงที่ของสเตเตอร์โดยหมุนโรเตอร์ สำหรับการทำงานของเครื่องยนต์ดังกล่าวไม่จำเป็นต้องใช้สวิตช์ภายนอกนักสะสมจะมีบทบาท สเตเตอร์สามารถทำได้ทั้งจากระบบแม่เหล็กถาวรและจากแม่เหล็กไฟฟ้า ในมอเตอร์ไฟฟ้าประเภทที่สอง ขดลวดจะสร้างส่วนที่คงที่ของมอเตอร์ (สเตเตอร์) และโรเตอร์ทำจากแม่เหล็กถาวร ที่นี่สนามแม่เหล็กไฟฟ้ากระแสสลับถูกสร้างขึ้นโดยการเปลี่ยนขดลวดสเตเตอร์ซึ่งดำเนินการโดยวงจรควบคุมภายนอก สเต็ปเปอร์มอเตอร์ ("สเต็ปเปอร์มอเตอร์" ในการสะกดคำภาษาอังกฤษ) มีราคาแพงกว่ามอเตอร์สะสมมาก อุปกรณ์เหล่านี้ค่อนข้างซับซ้อนพร้อมคุณสมบัติเฉพาะของตัวเอง คำอธิบายแบบเต็มต้องมีการตีพิมพ์แยกต่างหากและอยู่นอกเหนือขอบเขตของบทความนี้ สำหรับข้อมูลเพิ่มเติมเกี่ยวกับเครื่องยนต์ประเภทนี้และรูปแบบการควบคุม คุณสามารถอ้างอิงถึง
มอเตอร์สะสม (รูปที่ 1) มีราคาถูกกว่าและโดยทั่วไปไม่ต้องการระบบควบคุมที่ซับซ้อน สำหรับการทำงานก็เพียงพอที่จะจ่ายแรงดันไฟฟ้า (แก้ไข, คงที่!) ปัญหาเริ่มเกิดขึ้นเมื่อจำเป็นต้องปรับความเร็วในการหมุนของเพลาของเครื่องยนต์ดังกล่าวหรือในโหมดควบคุมแรงบิดพิเศษ มีข้อเสียหลักสามประการของเครื่องยนต์ดังกล่าว - นี่คือแรงบิดขนาดเล็กที่ความเร็วรอบต่ำ (ดังนั้นจึงมักต้องใช้กระปุกเกียร์และสิ่งนี้สะท้อนให้เห็นในต้นทุนของโครงสร้างโดยรวม) รุ่น ระดับสูงการรบกวนทางแม่เหล็กไฟฟ้าและคลื่นวิทยุ (เนื่องจากการเลื่อนหน้าสัมผัสในตัวสะสม) และความน่าเชื่อถือต่ำ (แม่นยำกว่านั้นคือทรัพยากรขนาดเล็ก เหตุผลอยู่ในตัวสะสมเดียวกัน) เมื่อใช้มอเตอร์สะสม ต้องคำนึงว่าการใช้กระแสไฟและความเร็วของการหมุนของโรเตอร์นั้นขึ้นอยู่กับโหลดบนเพลา มอเตอร์แบบมีแปรงถ่านใช้งานได้หลากหลายและแพร่หลายมากขึ้น โดยเฉพาะอย่างยิ่งในการใช้งานต้นทุนต่ำที่ราคาเป็นตัวกำหนด
เนื่องจากความเร็วของการหมุนของโรเตอร์ของมอเตอร์สะสมนั้นขึ้นอยู่กับแรงดันไฟฟ้าที่จ่ายให้กับมอเตอร์ อย่างแรกเลยคือการใช้วงจรสำหรับการควบคุมที่มีความสามารถในการตั้งค่าหรือปรับแรงดันเอาต์พุต วิธีแก้ปัญหาดังกล่าวที่สามารถพบได้บนอินเทอร์เน็ตเป็นแบบแผนตาม ความคงตัวที่ปรับได้แรงดันไฟฟ้าและเนื่องจากอายุของตัวปรับความคงตัวแบบไม่ต่อเนื่องได้ผ่านพ้นไปนานแล้ว ขอแนะนำให้ใช้ตัวปรับความคงตัวแบบอินทิกรัลที่ไม่แพงสำหรับสิ่งนี้ ตัวอย่างเช่น ทางเลือกที่เป็นไปได้โครงการดังกล่าวแสดงในรูปที่ 2
โครงการนี้เป็นแบบดั้งเดิม แต่ดูเหมือนว่าประสบความสำเร็จมากและที่สำคัญที่สุดคือราคาไม่แพง ลองดูจากมุมมองของวิศวกร ประการแรก เป็นไปได้ไหมที่จะจำกัดแรงบิดหรือกระแสของมอเตอร์? ซึ่งแก้ไขได้โดยการติดตั้งตัวต้านทานเพิ่มเติม ในรูปที่ 2 มีข้อความว่า R LIM การคำนวณมีอยู่ในข้อกำหนด แต่จะทำให้ประสิทธิภาพของวงจรลดลงในฐานะตัวควบคุมแรงดันไฟฟ้า (เพิ่มเติมเกี่ยวกับเรื่องนี้ด้านล่าง) ประการที่สอง ตัวเลือกการควบคุมความเร็วแบบใดดีกว่ากัน ตัวเลือกในรูปที่ 2a ให้ลักษณะการควบคุมเชิงเส้นที่สะดวก ซึ่งเป็นสาเหตุที่ได้รับความนิยมมากกว่า ตัวเลือกในรูปที่ 2b มีการตอบสนองที่ไม่เป็นเชิงเส้น แต่ในกรณีแรก ถ้าหน้าสัมผัสในตัวต้านทานปรับค่าเสีย เราจะได้ ความเร็วสูงสุดและในวินาที - ขั้นต่ำ อันไหนให้เลือกขึ้นอยู่กับแอปพลิเคชันเฉพาะ ลองพิจารณาตัวอย่างหนึ่งสำหรับมอเตอร์ที่มีพารามิเตอร์ทั่วไป: แรงดันไฟฟ้าที่ใช้งาน 12 V; กระแสไฟทำงานสูงสุด 1 A. LM317 IC ขึ้นอยู่กับส่วนต่อท้าย มีกระแสไฟขาออกสูงสุดตั้งแต่ 0.5 A ถึง 1.5 A (ดูข้อมูลจำเพาะ มีไอซีที่คล้ายกันที่มีกระแสไฟสูงกว่า) และการป้องกันขั้นสูง (ป้องกันการโอเวอร์โหลดและความร้อนสูงเกินไป) จากมุมมองนี้ มันเหมาะกับงานของเราอย่างสมบูรณ์แบบ ปัญหายังซ่อนอยู่ในรายละเอียดเช่นเคย หากเครื่องยนต์มีกำลังสูงสุดซึ่งสมจริงมากสำหรับการใช้งานของเรา บน IC แม้จะมีความแตกต่างขั้นต่ำที่อนุญาตระหว่างแรงดันไฟฟ้าอินพุต V IN และเอาต์พุต V OUT เท่ากับ 3 V พลังงานก็จะกระจายไปอย่างน้อย
P = (V IN - V OUT) × I = 3 × 1 = 3 วัตต์
ดังนั้นจึงจำเป็นต้องมีหม้อน้ำ คำถามอีกครั้งคือ - การกระจายพลังงานคืออะไร? ที่ 3 วัตต์? และนี่ไม่ใช่ ถ้าคุณไม่ขี้เกียจเกินไปและคำนวณกราฟโหลด IC ขึ้นอยู่กับแรงดันไฟขาออก (ซึ่งทำได้ง่ายใน Excel) เราจะเข้าใจได้ว่าภายใต้เงื่อนไขของเรา กำลังสูงสุดบน IC จะกระจายไม่อยู่ที่แรงดันไฟขาออกสูงสุด ของตัวควบคุม แต่ที่แรงดันเอาต์พุต 7.5 V ( ดูรูปที่ 3) และมันจะเกือบ 5.0 W!
อย่างที่คุณเห็น ปรากฎว่ามีบางอย่างไม่ถูกแล้ว แต่ยุ่งยากมาก ดังนั้นวิธีนี้จึงเหมาะสำหรับมอเตอร์กำลังต่ำที่มีกระแสไฟทำงานไม่เกิน 0.25 A เท่านั้น ในกรณีนี้กำลังของ IC ควบคุมจะอยู่ที่ระดับ 1.2 W ซึ่งเป็นที่ยอมรับอยู่แล้ว
ทางออกคือการใช้วิธีการมอดูเลตความกว้างพัลส์ (PWM) สำหรับการควบคุม เป็นเรื่องธรรมดาที่สุด สาระสำคัญของมันคือการจัดหาพัลส์สี่เหลี่ยม unipolar ที่มอดูเลตตามระยะเวลาของเครื่องยนต์ ตามทฤษฎีของสัญญาณ ในโครงสร้างของลำดับดังกล่าว มีองค์ประกอบคงที่ตามสัดส่วนของอัตราส่วน τ/T โดยที่ τ คือระยะเวลาพัลส์ และ T คือคาบของลำดับ เธอเป็นผู้ควบคุมความเร็วของเครื่องยนต์ ซึ่งทำให้เธอแตกต่างจากผู้รวมระบบในระบบนี้ เนื่องจากสเตจเอาท์พุตของเรกูเลเตอร์แบบ PWM ทำงานในโหมดสวิตชิ่ง จึงมักจะไม่จำเป็นต้องใช้ฮีทซิงค์ขนาดใหญ่เพื่อกระจายความร้อน ความจุขนาดใหญ่เครื่องยนต์และประสิทธิภาพของตัวควบคุมดังกล่าวนั้นสูงกว่ารุ่นก่อนอย่างไม่มีที่เปรียบ ในบางกรณี คุณสามารถใช้ตัวแปลง DC / DC แบบบั๊กหรือบูสต์ได้ แต่มีข้อจำกัดหลายประการ เช่น ในแง่ของความลึกของการปรับแรงดันเอาต์พุตและโหลดขั้นต่ำ ดังนั้นตามกฎแล้วการแก้ปัญหาอื่น ๆ จึงเป็นเรื่องธรรมดา การออกแบบวงจร "คลาสสิค" ของตัวควบคุมดังกล่าวแสดงในรูปที่ 4 มันถูกใช้เป็นคันเร่ง (ตัวควบคุม) ในรถไฟจำลองมืออาชีพ
ออสซิลเลเตอร์ถูกประกอบเข้ากับแอมพลิฟายเออร์ปฏิบัติการตัวแรก ตัวเปรียบเทียบในแอมพลิฟายเออร์ตัวที่สอง สัญญาณจากตัวเก็บประจุ C1 ถูกป้อนไปยังอินพุตของตัวเปรียบเทียบ และโดยการปรับเกณฑ์การตอบสนอง สัญญาณสี่เหลี่ยมที่มีอัตราส่วน τ/T ที่ต้องการจะถูกสร้างขึ้น (รูปที่ 5)
ช่วงการปรับตั้งค่าโดยตัวต้านทานการตัดแต่ง RV1 (เร็วกว่า) และ RV3 (ช้ากว่า) และการควบคุมความเร็วจะดำเนินการโดยตัวต้านทาน RV2 (ความเร็ว) ฉันดึงดูดความสนใจของผู้อ่านถึงความจริงที่ว่ารูปแบบที่คล้ายกันกำลังเผยแพร่บนอินเทอร์เน็ตในฟอรัมภาษารัสเซียโดยมีข้อผิดพลาดในการให้คะแนนของตัวแบ่งซึ่งกำหนดเกณฑ์ของตัวเปรียบเทียบ เครื่องยนต์ถูกควบคุมโดยตรงผ่านปุ่มบนทรานซิสเตอร์ชนิด field-effect อันทรงพลัง คุณสมบัติของทรานซิสเตอร์ประเภท MOSFET นี้คือกระแสไฟทำงานขนาดใหญ่ (30 A DC และพัลส์สูงถึง 120 A) ความต้านทานช่องสัญญาณเปิดต่ำพิเศษ (40 mΩ) และทำให้สูญเสียพลังงานขั้นต่ำในสถานะเปิด
สิ่งแรกที่ควรคำนึงถึงเมื่อใช้แผนดังกล่าวคืออะไร? ประการแรกคือการทำงานของวงจรควบคุม ที่นี่ในรูปแบบ (รูปที่ 4) มีข้อบกพร่องเล็กน้อย หากเมื่อเวลาผ่านไปมีปัญหากับหน้าสัมผัสเคลื่อนที่ของตัวต้านทานปรับค่าได้ เราจะเร่งเครื่องยนต์ได้เกือบจะในทันที สิ่งนี้อาจทำให้อุปกรณ์ของเราเสียหาย ยาแก้พิษคืออะไร? ติดตั้งตัวต้านทานความต้านทานสูงเพิ่มเติมที่เพียงพอ ตัวอย่างเช่น 300 kΩ จากเอาต์พุต 5 ของ IC ไปยังสายทั่วไป ในกรณีนี้ หากเครื่องปรับลมไม่ทำงาน เครื่องยนต์จะหยุดทำงาน
ปัญหาอีกประการหนึ่งของตัวควบคุมดังกล่าวคือระยะเอาต์พุตหรือตัวขับมอเตอร์ ในวงจรดังกล่าวสามารถทำได้ทั้งกับทรานซิสเตอร์แบบ field-effect และแบบไบโพลาร์ หลังมีราคาถูกกว่าอย่างหาที่เปรียบมิได้ แต่ทั้งตัวเลือกแรกและตัวที่สองนั้นจำเป็นต้องคำนึงถึงบ้าง จุดสำคัญ. ในการควบคุมทรานซิสเตอร์แบบ field effect แบบ MOSFET จำเป็นต้องจัดให้มีประจุและการคายประจุของความจุอินพุต และสามารถเป็น picofarad ได้หลายพันชิ้น หากไม่ได้ใช้ตัวต้านทานซีรีย์เกต (R6 ในรูปที่ 4) หรือค่าของมันน้อยเกินไป ความถี่สูงควบคุม, เครื่องขยายเสียงปฏิบัติการอาจล้มเหลว หากคุณใช้ R6 ในปริมาณมาก ทรานซิสเตอร์จะยังคงอยู่ในโซนแอ็คทีฟของลักษณะการถ่ายโอนอีกต่อไป ดังนั้นเราจึงมีความสูญเสียและความร้อนของคีย์เพิ่มขึ้น
หมายเหตุเพิ่มเติมสำหรับวงจรในรูปที่ 4 การใช้ไดโอดเพิ่มเติม D2 นั้นไม่สมเหตุสมผล เนื่องจากโครงสร้างของทรานซิสเตอร์ BUZ11 มีไดโอดป้องกันความเร็วสูงภายในของตัวเองซึ่งมีคุณสมบัติที่ดีกว่าแบบที่เสนอ ไดโอด D1 นั้นฟุ่มเฟือยอย่างเห็นได้ชัดเช่นกัน ทรานซิสเตอร์ BUZ11 ช่วยให้จ่ายแรงดันเกทซอร์สที่± 20 V และการกลับขั้วของขั้วในวงจรควบคุมด้วยการจ่ายไฟแบบขั้วเดียว เช่นเดียวกับแรงดันไฟฟ้าที่สูงกว่า 12 V นั้นเป็นไปไม่ได้
หากใช้ทรานซิสเตอร์แบบไบโพลาร์ ปัญหาจะเกิดขึ้นจากการสร้างกระแสเบสที่เพียงพอ ดังที่คุณทราบ ในการทำให้สวิตช์บนทรานซิสเตอร์ไบโพลาร์อิ่มตัว กระแสฐานของมันต้องมีอย่างน้อย 0.06 ของกระแสโหลด เป็นที่ชัดเจนว่าแอมพลิฟายเออร์ในการดำเนินงานอาจไม่ให้กระแสดังกล่าว เพื่อจุดประสงค์นี้ในความเป็นจริงที่คล้ายกันตัวควบคุมซึ่งใช้ตัวอย่างเช่นในเครื่องแกะสลักขนาดเล็กยอดนิยมของ บริษัท PT-5201 จะใช้ทรานซิสเตอร์ซึ่งเป็นวงจรดาร์ลิงตัน นี่คือจุดที่น่าสนใจ เครื่องแกะสลักขนาดเล็กเหล่านี้บางครั้งล้มเหลว แต่ไม่ได้เกิดจากความร้อนสูงเกินไปของทรานซิสเตอร์อย่างที่ใคร ๆ คาดคิด แต่เนื่องจากความร้อนสูงเกินไปของ IC (อุณหภูมิการทำงานสูงสุด +70 ° C) โดยทรานซิสเตอร์เอาต์พุต (อุณหภูมิที่อนุญาตสูงสุด +150 ° C) . ในผลิตภัณฑ์ที่ผู้เขียนบทความใช้ เขาถูกกดใกล้กับตัว IC และทากาว ซึ่งทำให้ไอซีร้อนขึ้นอย่างยอมรับไม่ได้และเกือบจะปิดกั้นตัวระบายความร้อน หากคุณพบประสิทธิภาพดังกล่าว จะเป็นการดีกว่าที่จะ "แกะ" ทรานซิสเตอร์ออกจาก IC และงอให้มากที่สุด สำหรับความรู้นี้ ผู้เขียนบทความได้รับชุดเครื่องมือจาก Pro'sKit อย่างที่คุณเห็น ทุกอย่างต้องได้รับการแก้ไขในภาพรวม ไม่เพียงแต่ดูที่วงจรเท่านั้น แต่ยังต้องใส่ใจกับการออกแบบตัวควบคุมโดยรวมด้วย
มีวงจรที่น่าสนใจกว่าสำหรับตัวควบคุม PWM ที่ง่ายกว่า ตัวอย่างเช่น วงจรสองวงจรที่ใช้ op-amp ไดรเวอร์ตัวเดียวถูกเผยแพร่ใน [
ในกรณีที่ต้องการการควบคุมความเร็วและแรงบิดของมอเตอร์ไฟฟ้าอย่างราบรื่นและแม่นยำในช่วงกว้าง จำเป็นต้องมีวงจรควบคุมมอเตอร์กระแสตรง
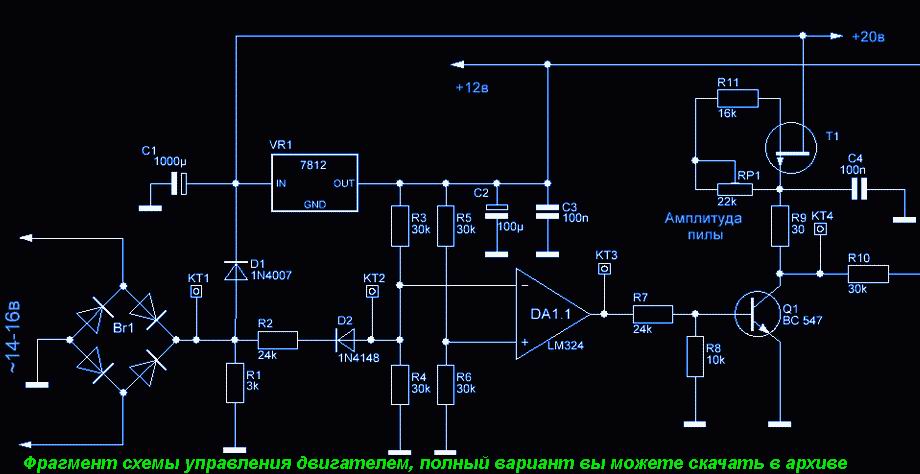
SIFU - ระบบควบคุมเฟสพัลส์ทำการเปลี่ยนแปลงไซน์ของแรงดันไฟหลักเป็นลำดับของพัลส์สี่เหลี่ยมตามเอาต์พุตควบคุมของเพาเวอร์ไทริสเตอร์ เมื่อเปิดวงจร แรงดันไฟสลับที่มีค่าเล็กน้อยที่ 14 - 16 โวลต์จะส่งผ่านไปยังวงจรเรียงกระแสแบบบริดจ์และจะถูกแปลงเป็นวงจรไฟฟ้าแบบเร้าใจ ซึ่งไม่เพียงแต่ให้พลังงานแก่โครงสร้างเท่านั้น แต่ยังช่วยซิงโครไนซ์การทำงานของอุปกรณ์อีกด้วย . Diode D2 ไม่ทำให้พัลส์ความจุ C1 ราบรื่น จากนั้นพัลส์จะติดตาม "ตัวตรวจจับศูนย์" ที่สร้างขึ้นบนองค์ประกอบแอมพลิฟายเออร์ LM324 DA1.1 ซึ่งรวมอยู่ในโหมดตัวเปรียบเทียบ ในขณะที่ไม่มีพัลส์ แรงดันไฟฟ้าที่อินพุตตรงและผกผันของ op-amp จะใกล้เคียงกันและตัวเปรียบเทียบจะมีความสมดุล
เมื่อไซนูซอยด์ผ่านจุดศูนย์ พัลส์จะปรากฏที่อินพุตผกผันของตัวเปรียบเทียบ สลับตัวเปรียบเทียบ ซึ่งเป็นผลมาจากการสร้างพัลส์นาฬิกาสี่เหลี่ยมที่เอาต์พุตของ DA1.1 ระยะเวลาการทำซ้ำขึ้นอยู่กับศูนย์ จุด. ดูรูปคลื่นเพื่อทำความเข้าใจวิธีการทำงาน จากบนลงล่าง: CT1, CT2, CT3
วงจรควบคุมมอเตอร์กระแสตรงถูกจำลองในโปรแกรม ไฟล์เก็บถาวรที่มีเวอร์ชันเต็มของการก่อสร้างที่อยู่ระหว่างการพิจารณามีไฟล์โครงการสำหรับโปรแกรมนี้ คุณสามารถเปิดและดูว่าโหนดนี้ทำงานอย่างไร จากนั้นจึงสรุปข้อสรุปสุดท้ายเกี่ยวกับการควบคุมมอเตอร์กระแสตรง ก่อนที่จะเริ่มประกอบผลิตภัณฑ์วิทยุสมัครเล่นแบบโฮมเมด
กลับไปทำงานกันเถอะ - พัลส์นาฬิกาจะติดตามผู้รวมระบบด้วยคีย์ทรานซิสเตอร์ (C4, Q1) ซึ่งจะสร้างแรงดันไฟฟ้าฟันเลื่อย ในขณะที่เฟสผ่านจุดศูนย์ ซิงก์พัลส์จะปลดล็อกทรานซิสเตอร์ตัวแรก ซึ่งจะปล่อยประจุ C4 หลังจากที่พัลส์สลายตัวทรานซิสเตอร์จะถูกล็อคและความจุจะถูกชาร์จจนกว่าพัลส์การซิงค์ครั้งต่อไปจะมาถึงอันเป็นผลมาจากแรงดันฟันเลื่อยที่เพิ่มขึ้นเชิงเส้นถูกสร้างขึ้นบนตัวสะสมทรานซิสเตอร์ (KT4 ออสซิลโลแกรม) ทำให้เสถียรโดยเครื่องกำเนิดกระแสไฟฟ้าที่เสถียรบน ทรานซิสเตอร์แบบขั้วเดียว T1
แอมพลิจูดของแรงดันฟันเลื่อยประมาณ 9 โวลต์ถูกกำหนดโดยตัวต้านทานปรับค่า RP1 แรงดันไฟฟ้านี้ใช้กับอินพุตโดยตรงของตัวเปรียบเทียบ DA1.2 แรงดันอ้างอิงตามอินพุตผกผันของตัวเปรียบเทียบ DA1.2 และในขณะที่แอมพลิจูดของแรงดันฟันเลื่อยเกินแรงดันที่อินพุตผกผัน ตัวเปรียบเทียบจะพลิกไปยังสถานะตรงกันข้ามและสร้างพัลส์ที่เอาต์พุต (ออสซิลโลแกรม KT4).
แรงกระตุ้นมีความแตกต่างกันผ่านสายโซ่ของส่วนประกอบวิทยุแฝง R14, C6 และติดตามไปยังฐานของวินาที ทรานซิสเตอร์สองขั้วซึ่งเปิดขึ้นด้วยเหตุนี้และพัลส์ของการเปิดไทริสเตอร์กำลังจะเกิดขึ้นบนหม้อแปลงพัลส์ โดยการเพิ่มหรือลดแรงดันอ้างอิง คุณสามารถปรับรอบการทำงานของพัลส์ใน KT5 ได้
แต่เราจะไม่เห็นพัลส์ใดๆ บนออสซิลโลแกรม KT5 จนกว่าเราจะกดสวิตช์สลับ S1 เมื่อไม่ได้กด แรงดันไฟจ่าย + 12V ผ่านหน้าสัมผัส S1 ถึง R12, D3 จะตามอินพุตผกผัน DA1.2 เนื่องจากแรงดันไฟฟ้านี้สูงกว่าแรงดัน "เลื่อย" เครื่องเปรียบเทียบจะปิดลงและจะไม่สร้างพัลส์ไทริสเตอร์ที่เปิดอยู่
เพื่อป้องกันสถานการณ์ฉุกเฉินและการพังของมอเตอร์ไฟฟ้า หากตัวควบคุมความเร็วไม่ได้ตั้งค่าเป็น "0" วงจรจะมีหน่วยเร่งความเร็วบนองค์ประกอบ C5, R13 ที่ออกแบบมาเพื่อการเร่งความเร็วของเครื่องยนต์ที่ราบรื่น
เมื่อกดสวิตช์สลับ S1 หน้าสัมผัสจะเปิดขึ้นและความจุ C5 จะเริ่มชาร์จอย่างราบรื่น และแรงดันไฟฟ้าบนเพลตลบของตัวเก็บประจุเข้าใกล้ศูนย์ แรงดันไฟฟ้าที่อินพุทอินพุท DA1.2 เพิ่มขึ้นเป็นค่าของแรงดันอ้างอิง และเครื่องเปรียบเทียบจะเริ่มสร้างพัลส์เพื่อเปิดเพาเวอร์ไทริสเตอร์ เวลาในการชาร์จถูกกำหนดโดยส่วนประกอบวิทยุ C5, R13
หากในระหว่างการทำงานของเครื่องยนต์จำเป็นต้องปรับความเร็วจะมีการเพิ่มหน่วยเร่งความเร็วและลดความเร็ว R21, C8, R22 ลงในวงจร ด้วยการเพิ่มขึ้นหรือลดลงของแรงดันอ้างอิง ความจุ C8 จะถูกชาร์จหรือคายประจุอย่างราบรื่น ซึ่งกำจัด "ไฟกระชาก" ที่แหลมคมของแรงดันไฟฟ้าที่อินพุตผกผันและทำให้ความเร็วของเครื่องยนต์เพิ่มขึ้นอย่างรวดเร็ว
เครื่องปรับลมใช้เพื่อรักษาความเร็วคงที่ในเขตควบคุม ตัวควบคุมถูกสร้างขึ้นบนพื้นฐานของแอมพลิฟายเออร์ดิฟเฟอเรนเชียลโดยมีผลรวมของแรงดันไฟฟ้าสองตัว: การอ้างอิงและข้อเสนอแนะ แรงดันอ้างอิงเกิดขึ้นจากความต้านทาน RP1 และติดตามผ่านตัวกรองบนส่วนประกอบ R20, C8, R21 ซึ่งทำหน้าที่ของหน่วยเร่งความเร็วและลดความเร็ว และป้อนอินพุต DA1.3 ผกผัน เมื่อแรงดันอ้างอิงเพิ่มขึ้นที่เอาต์พุต DA1.3 แรงดันเอาต์พุตจะลดลงเป็นเส้นตรง
แรงดันไฟขาออกของตัวควบคุมจะเป็นไปตามอินพุตผกผันของตัวเปรียบเทียบ SIFU DA1.2 โดยที่เมื่อรวมกับพัลส์ "เลื่อย" แล้วจะกลายเป็นชุดของพัลส์รูปสี่เหลี่ยมผืนผ้าตามไทริสเตอร์ไปยังอิเล็กโทรด เมื่อแรงดันอ้างอิงเพิ่มขึ้นหรือลดลง แรงดันเอาต์พุตที่เอาต์พุตของชุดจ่ายไฟก็เพิ่มขึ้นหรือลดลงเช่นกัน กราฟแสดงการพึ่งพาความเร็วของเครื่องยนต์กับแรงดันอ้างอิง
ตัวแบ่งแรงดันไฟบนตัวต้านทาน R22, R23 ที่เชื่อมต่อกับอินพุตโดยตรงของตัวควบคุม DA1.3 ได้รับการออกแบบมาเพื่อขจัดเหตุฉุกเฉินในกรณีที่มีการป้อนกลับ
เมื่อเปิดไดรฟ์ เครื่องกำเนิดไฟฟ้า tachogenerator จะสร้างแรงดันไฟฟ้าตามสัดส่วนกับความเร็วของมอเตอร์ไฟฟ้า แรงดันไฟฟ้านี้ไปที่อินพุตของเครื่องตรวจจับความแม่นยำ DA1.4, DA2.1 ที่สร้างขึ้นตามวงจรคลื่นเต็มแบบคลาสสิก จากเอาต์พุต แรงดันไฟฟ้าจะติดตามผ่านตัวกรองบนส่วนประกอบแบบพาสซีฟ C10, R30, R33 ไปยังแอมพลิฟายเออร์การปรับขนาด OS DA2.2 แอมพลิฟายเออร์ใช้เพื่อปรับแรงดัน OS ที่มาจากเครื่องกำเนิดความเร็วรอบ แรงดันไฟฟ้าจากเอาต์พุต DA2.2 ไปที่อินพุต DA1.3 และไปยังวงจรป้องกัน DA2.3
ความต้านทาน RP1 สร้างการหมุนรอบของมอเตอร์ไฟฟ้า เมื่อทำงานโดยไม่มีโหลด แรงดันไฟฟ้าที่เอาต์พุตของเครื่องขยายเสียงสำหรับมาตราส่วนจะน้อยกว่าแรงดันไฟฟ้าที่ขาที่หกของ DA1.3 ดังนั้นไดรฟ์จึงทำหน้าที่เป็นตัวควบคุม
เมื่อโหลดบนเพลาเพิ่มขึ้น แรงดันไฟฟ้าที่ถูกลบออกจากเครื่องกำเนิดไฟฟ้ารอบเครื่องยนต์จะลดลง และเป็นผลให้แรงดันไฟฟ้าจากเอาต์พุตของเครื่องขยายเสียงสเกลลดลง เมื่อระดับนี้น้อยกว่าที่ขา 5 ของ DA1.3 op amp ไดรฟ์จะเข้าสู่โซนการรักษาเสถียรภาพปัจจุบัน การลดแรงดันไฟฟ้าที่อินพุตที่ไม่กลับด้าน DA1.3 จะลดแรงดันไฟฟ้าที่เอาต์พุต และเนื่องจากมันทำงานบนแอมพลิฟายเออร์แบบกลับด้าน DA1.2 สิ่งนี้จะเพิ่มมุมเปิดของไทริสเตอร์ และเพิ่มระดับที่ เกราะของมอเตอร์
การป้องกันความเร็วเกินจะประกอบบนแอมพลิฟายเออร์สำหรับการดำเนินงาน DA2.3 ซึ่งรวมอยู่ในเครื่องเปรียบเทียบ อินพุทกลับด้านรับแรงดันอ้างอิงจากตัวแบ่ง R36, R37, RP3 ความต้านทาน RP3 ควบคุมระดับของการดำเนินการป้องกัน แรงดันไฟฟ้าจากเอาต์พุตของเครื่องขยายเสียง DA2.2 ไปที่อินพุตโดยตรง DA2.3
เมื่อความเร็วเกินกำหนด อินพุตโดยตรงของตัวเปรียบเทียบจะเกินเกณฑ์ของการตั้งค่าการป้องกันที่กำหนดโดยความต้านทาน RP3 และสวิตช์ตัวเปรียบเทียบ
เนื่องจากการมีข้อเสนอแนะในเชิงบวกในวงจร R38 นำไปสู่การ "ล็อค" ของตัวเปรียบเทียบและไดโอด VD12 ไม่อนุญาตให้รีเซ็ตตัวเปรียบเทียบ เมื่อการป้องกันถูกกระตุ้น เอาต์พุตของตัวเปรียบเทียบผ่านไดโอด VD14 จะตามด้วยอินพุตผกผัน 13 DA1.2 ของ SIFU และเนื่องจากแรงดันป้องกันอยู่เหนือระดับ "เลื่อย" เอาต์พุตของพัลส์ควบคุมจะถูกส่งไปยังอิเล็กโทรดของ ไทริสเตอร์กำลังจะถูกห้ามทันที
แรงดันไฟฟ้าจากเอาต์พุตของตัวเปรียบเทียบการป้องกัน DA2.3 จะปลดล็อกทรานซิสเตอร์ VT4 ซึ่งจะเปิดรีเลย์ P1.1 และไฟ LED จะสว่างขึ้นเพื่อบ่งชี้ว่าเกิดอุบัติเหตุ จะสามารถถอดการป้องกันได้หากปิดไดรฟ์โดยสมบูรณ์ และหลังจากหยุดชั่วคราว 5-10 วินาที ให้ใช้พลังงานอีกครั้ง
ส่วนกำลังของชุดควบคุมแสดงในรูปด้านล่าง:
Transformer Tr1 ใช้สำหรับจ่ายไฟให้กับวงจรหน่วยควบคุม วงจรเรียงกระแสถูกประกอบขึ้นตามวงจรฮาล์ฟบริดจ์และประกอบด้วยไดโอดกำลังสอง D1, D2 และไทริสเตอร์กำลังสองตัว T1, T2 รวมถึงไดโอดป้องกัน D3 ขดลวดกระตุ้นนั้นใช้พลังงานจากหม้อแปลงไฟฟ้าและวงจรเรียงกระแสแยกต่างหาก หากเครื่องยนต์ไม่มีเครื่องกำเนิดไฟฟ้า tachogenerator สามารถใช้ OS เพื่อควบคุมความเร็วได้ดังนี้:
หากใช้หม้อแปลงกระแสไฟ จัมเปอร์ P1 บนวงจรควบคุมมอเตอร์กระแสตรงต้องตั้งค่าไว้ที่ตำแหน่ง 1-3
คุณยังสามารถใช้เซ็นเซอร์แรงดันกระดอง:
เซ็นเซอร์แรงดันกระดองเป็นตัวแบ่งตัวกรองที่เชื่อมต่อโดยตรงกับขั้วกระดอง ไดรฟ์ได้รับการกำหนดค่าดังนี้ ตัวต้านทาน "Reference" และ "Scaling Uoc" ถูกหมุนไปที่ตำแหน่งตรงกลาง ความต้านทาน R5 ของเซ็นเซอร์แรงดันกระดองบิดให้น้อยที่สุด เราเปิดไดรฟ์และตั้งแรงดันกระดองไว้ที่ประมาณ 110 โวลต์ โดยการวัดแรงดันกระดองเราเริ่มหมุนความต้านทาน R5 เมื่อถึงจุดหนึ่งของการเปลี่ยนแปลง แรงดันกระดองจะเริ่มลดลง ซึ่งบ่งชี้ว่าระบบปฏิบัติการทำงานได้
ภาพวาดของแผงวงจรพิมพ์สำหรับควบคุมมอเตอร์กระแสตรงนั้นสร้างขึ้นในโปรแกรมและคุณสามารถสร้างแผงวงจรพิมพ์ด้วยมือของคุณเองได้อย่างง่ายดายโดยใช้วิธีการ
มาเริ่มตั้งค่าการออกแบบโดยการตรวจสอบแรงดันไฟฟ้าที่ op-amp DA1, DA2 แนะนำให้ติดตั้งไมโครเซอร์กิตในซ็อกเก็ต จากนั้นเราตรวจสอบรูปคลื่นที่จุดควบคุม CT1, CT2, CT3 ณ จุด CT4 เราควรเห็นพัลส์ฟันเลื่อยเมื่อเปิดปุ่ม
ด้วยความต้านทานของทริมเมอร์ RP1 เราตั้งค่าการแกว่งของ "เลื่อย" ไว้ที่ประมาณ 9 โวลต์ ที่จุดควบคุม CT3 ระยะเวลาของพัลส์จะอยู่ที่ประมาณ 1.5 - 1.8 มิลลิวินาที หากเราไม่เห็นสิ่งนี้ การลดความต้านทาน R4 จะทำให้เราได้ระยะเวลาที่ต้องการ
ด้วยการหมุนคันโยก RR1 ที่จุดควบคุม KT5 เราควบคุมการเปลี่ยนแปลงในวัฏจักรหน้าที่ของพัลส์จากค่าสูงสุดไปเป็นการหายไปโดยสมบูรณ์ที่ความต้านทานต่ำสุด RR1 ในกรณีนี้ ความสว่างของหลอดไฟที่เชื่อมต่อกับชุดจ่ายไฟซึ่งเราเชื่อมต่อเป็นโหลด ควรเปลี่ยนไป
จากนั้นเราเชื่อมต่อชุดควบคุมกับเครื่องยนต์และตัวสร้างความเร็วรอบ ตั้งเรกูเลเตอร์ RR1 อาร์เมเจอร์ แรงดัน 40-50 โวลต์ แนวต้าน RP3 ควรอยู่ในตำแหน่งตรงกลาง โดยการวัดแรงดันที่อาร์มาเจอร์ของมอเตอร์ ให้หมุนความต้านทาน RP3 เมื่อถึงจุดหนึ่งในการปรับจูน แรงดันกระดองจะเริ่มลดลง ซึ่งบ่งชี้ว่าผลป้อนกลับทำงานได้
หากใช้กระแสย้อนกลับของกระดอง จำเป็นต้องใช้หม้อแปลงกระแสซึ่งรวมอยู่ในวงจรไฟฟ้ากระแสสลับ วงจรสอบเทียบหม้อแปลงกระแสมีอธิบายไว้ด้านล่าง โดยการเลือกความต้านทาน ให้รับแรงดันไฟฟ้าสลับ 2 ÷ 2.5v ที่เอาต์พุตของหม้อแปลงไฟฟ้า กำลังโหลด RN1 ต้องเท่ากับกำลังมอเตอร์
จำไว้ว่าไม่แนะนำให้เปิดหม้อแปลงกระแสที่ไม่มีตัวต้านทานโหลด
เราเชื่อมต่อหม้อแปลงกระแสกับวงจร OS P1 และ P2 ในขณะที่ทำการปรับ ขอแนะนำให้ยกเลิกการขายไดโอด D12 เพื่อไม่ให้มีการดำเนินการป้องกันที่ผิดพลาด ออสซิลโลแกรมที่จุดควบคุม KT8, KT9, KT10 แสดงในรูปด้านล่าง
การปรับเพิ่มเติมจะเหมือนกับในกรณีของการใช้เครื่องกำเนิดไฟฟ้า
ชุดควบคุมมอเตอร์กระแสตรงนี้สร้างขึ้นด้วยมือสำหรับเครื่องคว้าน ดูภาพในไฟล์เก็บถาวรที่ลิงค์สีเขียวด้านบน
ในมอเตอร์กระแสตรง แรงบิดถูกสร้างขึ้นโดยปฏิกิริยาระหว่างสนามแม่เหล็กสองแห่ง: สนามหนึ่งถูกกำหนดโดยขดลวดสนามที่อยู่กับที่และอีกสนามหนึ่งโดยขดลวดในเกราะหมุน มอเตอร์กระแสตรงบางตัวไม่มีขดลวดสนามแทนที่จะเป็นขนาดใหญ่ แม่เหล็กถาวรทำให้สนามแม่เหล็กคงที่ในทุกสภาวะการทำงาน
ไม่ว่าในกรณีใด หลักการทำงานของมอเตอร์กระแสตรงก็คือกระแสที่ไหลผ่านเกราะจะสร้างสนามแม่เหล็กที่พยายามปรับแนวให้เข้ากับสนามที่อยู่กับที่ ดังนั้นสมอหมุน:
อย่างไรก็ตาม, นักสะสม(ตามที่เรียกชุดของแถบทองแดงแบบแบ่งส่วน) แบ่งหน้าสัมผัสทางไฟฟ้ากับขดลวดที่ "จัดแนว" แล้ว และกระตุ้นอีกขดลวดอีกอันหนึ่ง (หรือดังในตัวอย่างง่ายๆ ที่แสดงด้านบน กระตุ้นวงจรเดียวกันในทิศทางตรงกันข้ามมากเกินไป) ทำให้เกิดอีกเส้นที่ไม่อยู่ในแนวเดียวกัน สนามแม่เหล็กที่หมุนสมอต่อไป หน้าสัมผัสทางไฟฟ้าระหว่างส่วนสับเปลี่ยนที่หมุนได้และแหล่งจ่ายไฟแบบอยู่กับที่จะผ่านแปรงถ่าน แปรงเหล่านี้เสื่อมสภาพตามกาลเวลา (เช่นตัวสับเปลี่ยนเอง) ดังนั้นจึงจำเป็นต้องเปลี่ยนเป็นระยะ
มอเตอร์กระแสตรงอุตสาหกรรมส่วนใหญ่ทำด้วยขดลวดกระดองหลายอันแทนที่จะเป็นเพียงอันเดียวดังที่แสดงในภาพประกอบแบบง่ายด้านบน รูปถ่ายของมอเตอร์ไฟฟ้ากระแสตรงขนาดใหญ่ (1250 แรงม้า) ที่ใช้ขับเคลื่อนเรือข้ามฟากที่มีขดลวดและกระดองแสดงไว้ที่นี่:
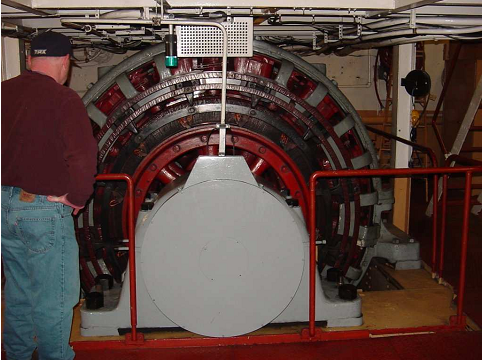
การประกอบแปรงหนึ่งชุดของมอเตอร์ไฟฟ้านี้แสดงให้เห็นภาพระยะใกล้ของแปรงคาร์บอนทั้งสอง ที่ยึดแบบสปริง และแท่งสับเปลี่ยนจำนวนหนึ่งซึ่งแปรงจะสัมผัสกันเมื่อกระดองหมุน

ในมอเตอร์กระแสตรง ความสัมพันธ์ต่อไปนี้ระหว่างปริมาณทางกลและทางไฟฟ้าจะปรากฏขึ้น:
แรงบิด:
- โมเมนต์เป็นสัดส่วนโดยตรงกับแรง สนามแม่เหล็กกระดองซึ่งในทางกลับกันเป็นสัดส่วนโดยตรงกับกระแสที่ไหลผ่านขดลวดกระดอง
- แรงบิดยังเป็นสัดส่วนโดยตรงกับความแรงของสนามแม่เหล็กคงที่ ซึ่งในทางกลับกัน จะเป็นสัดส่วนโดยตรงกับกระแสที่ไหลผ่านขดลวดที่น่าตื่นเต้น (ในมอเตอร์ที่ไม่มีแม่เหล็ก)
- ความเร็วถูกจำกัดโดย EMF ที่สร้างขึ้นโดยเกราะเมื่อหมุนในสนามแม่เหล็กคงที่ EMF นี้เป็นสัดส่วนโดยตรงกับความเร็วของการหมุนของกระดอง และยังแปรผันโดยตรงกับความแรงของสนามแม่เหล็กคงที่ (ซึ่งเป็นสัดส่วนโดยตรงกับกระแสของขดลวดที่น่าตื่นเต้นในมอเตอร์ไฟฟ้าที่ไม่มีแม่เหล็ก)
- ดังนั้นความเร็วจึงเป็นสัดส่วนโดยตรงกับแรงดันกระดอง
- นอกจากนี้ ความเร็วยังแปรผกผันกับความแรงของสนามแม่เหล็กคงที่ ซึ่งเป็นสัดส่วนโดยตรงกับกระแสที่ไหลผ่านขดลวดที่น่าตื่นเต้น (ในมอเตอร์ที่ไม่มีแม่เหล็ก)
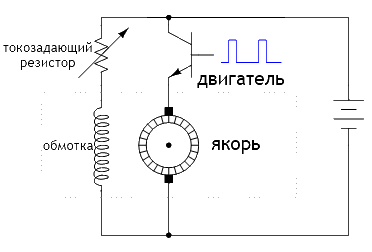
ความต้านทานที่ลดลงของตัวต้านทานการตั้งค่าปัจจุบันช่วยให้กระแสไหลผ่านขดลวดของไดรฟ์ได้มากขึ้น ส่งผลให้สนามแม่เหล็กเพิ่มขึ้น สิ่งนี้จะมีผลกระทบสองประการต่อการทำงานของมอเตอร์: ประการแรก มอเตอร์จะผลิตแรงบิดมากขึ้นกว่าเดิม (สำหรับกระแสกระดองในปริมาณเท่ากัน) เนื่องจากสนามแม่เหล็กของกระดองที่แรงกว่าจะกระทำกับเกราะ ประการที่สอง ความเร็วของมอเตอร์จะลดลงเนื่องจาก EMF หลังขนาดใหญ่จะถูกสร้างขึ้นโดยเกราะที่หมุนได้ที่ความเร็วรอบเดียวกัน และ EMF ด้านหลังนี้จะพยายามจับคู่กับแรงดันไฟ DC ที่ใช้โดยธรรมชาติ ในทางกลับกัน เราสามารถเพิ่มความเร็วของมอเตอร์กระแสตรง (และลดแรงบิดเอาต์พุต) โดยการเพิ่มความต้านทานของตัวต้านทานควบคุม ทำให้สนามแม่เหล็กอยู่กับที่ที่หมุนอาร์มาเจอร์อ่อนลง
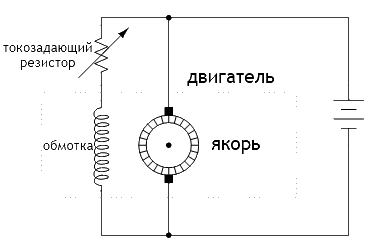
ด้วยการปรับกระแสไฟที่คดเคี้ยว คุณสามารถเปลี่ยนความสมดุลระหว่างความเร็วและแรงบิดได้ แต่นี่ยังไม่เพียงพอที่จะควบคุมโดยรวม พลังเครื่องยนต์. ในการควบคุมกำลังขับของมอเตอร์กระแสตรง เรายังต้องควบคุมแรงดันและกระแสของกระดองด้วย ตัวต้านทานปรับค่าได้สามารถใช้กับงานนี้ได้ แต่วิธีนี้ไม่ได้ใช้ในขณะนี้ เนื่องจากจะทำให้สูญเสียพลังงาน
ทางออกที่ดีที่สุดคือการใช้วงจรควบคุมกำลังไฟฟ้าบน สวิตช์ทรานซิสเตอร์ปิดและเปิดเกราะมอเตอร์ในวงจรอย่างรวดเร็ว การควบคุมประเภทนี้เรียกว่า Pulse Width Modulation หรือ PWM
(อัตราส่วนของระยะเวลาชีพจรต่อระยะเวลาที่เกิดซ้ำ, ผกผันกับ รอบการทำงานขนาด) ของพัลส์กำหนดสัดส่วนของกำลังที่ส่งไปยังเครื่องยนต์:
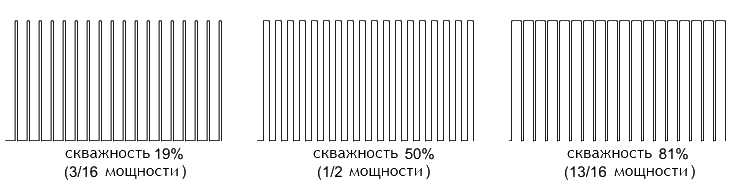
ในรูป ข้อผิดพลาดไม่ใช่ "รอบการทำงาน" แต่เป็น "ปัจจัยหน้าที่"
เช่น วงจรไฟฟ้าการควบคุมพลังงานโดยทั่วไปจะเรียกว่า ขับเคลื่อน. ดังนั้นไดรฟ์ความเร็วตัวแปร (หรือ VSD) จึงเป็นวงจรกำลังสูงที่ใช้ในการควบคุมความเร็วของมอเตอร์กระแสตรง สามารถตั้งค่าไดรฟ์มอเตอร์ด้วยตนเองเพื่อสตาร์ทมอเตอร์ด้วยความเร็วที่กำหนด หรือสามารถรับสัญญาณควบคุมอิเล็กทรอนิกส์เพื่อเปลี่ยนความเร็วของมอเตอร์ในลักษณะเดียวกับที่สัญญาณอิเล็กทรอนิกส์ควบคุมการเคลื่อนไหว พร้อม ระบบระยะไกลการส่งสัญญาณควบคุม การทำงานของไดรฟ์เหมือนกับองค์ประกอบผู้บริหารขั้นสุดท้ายอื่นๆ: ตามคำสั่งของตัวควบคุม พารามิเตอร์ทางเทคโนโลยีบางอย่างจะเสถียร .
เทคโนโลยีดั้งเดิมสำหรับ แหล่งจ่ายไฟสลับวงจรใช้มอเตอร์กระแสตรง วงจรเรียงกระแสควบคุมที่จะแปลงร่าง กระแสสลับในค่าคงที่แทนไดโอดเรียงกระแสทั่วไปจะใช้ไทริสเตอร์ แหล่งพลังงานหลักสำหรับมอเตอร์กระแสตรงอุตสาหกรรมยังคงเป็นกระแสสลับ และกระแสสลับนี้จะต้องถูกแปลงเป็นกระแสตรงในบางจุดในระบบ มันสมเหตุสมผลแล้วที่จะรวมการควบคุมเข้ากับหน่วยเรียงกระแสนี้โดยตรง:
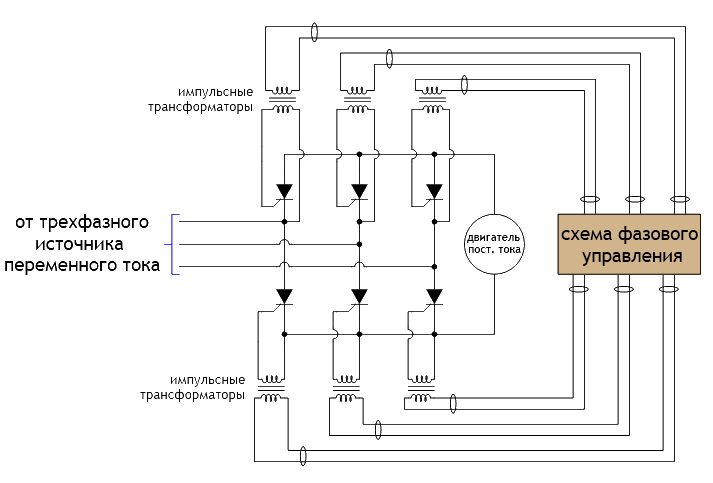
วงจรเรียงกระแสควบคุมทำงานบนหลักการของการเปลี่ยนเวลาของพัลส์ "เริ่มต้น" ที่สัมพันธ์กับพัลส์ของการสั่นของกระแสสลับ ไทริสเตอร์จะเปิดเร็วขึ้นในแต่ละช่วงไฟกระแสสลับ กระแสไฟก็จะส่งไปยังมอเตอร์นานขึ้น วงจรควบคุมเฟสมีหน้าที่สร้างพัลส์และระยะเวลา
ไดรฟ์ DC ที่เพียงแค่ควบคุมกำลังของมอเตอร์จะรู้สึกไม่ดีและควบคุมได้ยากสำหรับกระบวนการส่วนใหญ่ สิ่งที่คุณต้องการจากไดรฟ์แบบปรับได้คือการควบคุมที่แม่นยำ ความเร็วเครื่องยนต์. ด้วยเหตุนี้ ไดรฟ์ส่วนใหญ่จึงได้รับการออกแบบให้รับข้อเสนอแนะจากเครื่องวัดวามเร็วที่เชื่อมต่อทางกลไกกับเพลามอเตอร์ เครื่องวัดวามเร็วมักจะเป็นเครื่องกำเนิดขนาดเล็กที่สร้าง ความดันคงที่, สัดส่วนโดยตรงกับความเร็วของการหมุนของเพลา (ด้วยเอาต์พุต 0-10 V) ตามคำให้การของเขา คันเร่งแบบปรับได้ของไดรฟ์ พลังงานไฟฟ้า, จ่ายให้กับเครื่องยนต์เพื่อให้ความเร็วในการหมุนสอดคล้องกับสัญญาณควบคุมที่กำหนด ด้วยลูปป้อนกลับในตัวสำหรับการควบคุมความเร็ว ไดรฟ์แบบปรับความเร็วได้จะกลายเป็น "ตัวควบคุมผู้ติดตาม" ในระบบควบคุม ไดรฟ์สามารถรับเอาต์พุตอ้างอิงความเร็วจาก